elektronik - fachschaft mathphysinfo · i einleitung die elektronik spielt im leb en jedes...
TRANSCRIPT

Elektronik f�ur PhysikerScriptum zur Vorlesung im Wintersemester 1998/99U. StraumannPhysikalisches Institut Universit�at Heidelberg

iEinleitungDie Elektronik spielt im Leben jedes erfolgreichen Experimentalphysikers eine zentraleRolle. Praktisch alle physikalischen Messungen werden vom Experimentator - anstelledirekter Beobachtung mit einem seiner f�unf Sinne - mit Hilfe von Sensoren durchgef�uhrt,die die physikalische Messgr�osse in eine elektrischen Spannung oder Ladung transfor-miert. (Sechste und h�ohere Sinne (\Intuition") sind allerdings nach wie vor unverzicht-bare Hilfsmittel f�ur ein erfolgreiches Experimentieren, besonders auch bei Verwendungvon elektronischen Ger�aten.) Diese elektrischen Messignale m�ussen verst�arkt, ge�ltert,digitalisiert, komprimiert und einem Rechner zugef�uhrt werden, wo die Daten schlies-slich protokolliert und analysiert werden. In dieser Vorlesung sollen alle diese Schritteder Messkette behandelt werden.\Messen" bedeutet bekanntlich \Fehler machen". Ein zentrales Anliegen der Elek-tronikausbildung eines Physikers muss es deshalb auch sein, das Verst�andnis f�ur die inelektronischen Messschaltungen auftretenden Messfehler zu wecken und zu f�ordern.Experimentieren heisst aber auch, Naturvorg�ange unter wohlde�nierten Umweltbe-dingungen zu beobachten. Neben der Messung stellen deshalb auch die Steuerung undRegulierung dieser Umweltbedingungen ein weites Anwendungsgebiet f�ur elektronischeSchaltungen dar, die vom Physiker verstanden, richtig eingesetzt und gelegentlich auchselbst entwickelt werden m�ussen.Experimentalphysiker verwenden fertige elektronische Schaltungen, oder sie legendie Spezi�kationen f�ur die Entwicklung von neuen Ger�aten fest. Oft stehen sie auch vordem Problem, dass mehrere Ger�ate mit den richtigen Funktionen zwar zur Verf�ugungstehen, aber signalm�assig nicht richtig zu einander passen. Dann muss ein Interfacegebastelt werden.Das Ziel dieser einsemestrigen Einf�uhrung ist es dementsprechend, die H�orer zubef�ahigen,1. einschl�agige elektronische Schaltungen funktionsm�assig und numerisch zu disku-tieren und ihre Genauigkeiten und Grenzen abzusch�atzen.2. f�ur Neuentwicklungen realistische Spezi�kationen zu erarbeiten.3. kompetente Gespr�achspartner von Elektronikingenieuren zu sein.Diese Vorlesung richtet sich an Studenten in der mittleren Ausbildung und soll dieGrundlage f�ur die experimentelle T�atigkeit legen, die in der Regel mit der Diplomarbeit

iibeginnt. Sie ist grunds�atzlich praktisch orientiert. So werden viele technische Einzelhei-ten behandelt, oder es wird auf entsprechende Literatur und Tabellen verwiesen.Die Vorlesung legt etwa gleichviel Gewicht auf digitale und analoge Elektronik. DerAufbau und die Funktionsweise von Computern wird jedoch nicht direkt behandelt(siehe seperate Veranstaltungen). Auf der anderen Seite wird ebenfalls die physikalischeFunktionsweise von Halbleiterbauelementen nur sehr vereinfachend diskutiert, wie sief�ur den Anwender relevant sind.Simulationsprogramme (SPICE) und rechnergest�utzte Entwicklungshilfsmittel (Si-mulation, Synthese, Layout usw.) werden entsprechend ihrer Bedeutung vorgestellt.

Inhaltsverzeichnis1 Strom, Spannung, Widerstand 11.1 Komplexe Widerst�ande, passive Bauelemente . . . . . . . . . . . . . . . . 11.1.1 Komplexe Spannungen und Str�ome . . . . . . . . . . . . . . . . . 11.1.2 Das Ohm'sche Gesetz . . . . . . . . . . . . . . . . . . . . . . . . . 31.1.3 Reelle Widerst�ande, Induktivit�aten, Kapazit�aten . . . . . . . . . . 41.1.4 Bauformen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.2 Strom- und Spannungsquellen . . . . . . . . . . . . . . . . . . . . . . . . 151.2.1 Reale und lineare Strom- und Spannungsquellen . . . . . . . . . . 151.2.2 Drehstrom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.3 Die Kirchho�'sche Regeln . . . . . . . . . . . . . . . . . . . . . . . . . . 181.4 SPICE Simulationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.5 Endliche Leitungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.6 Physik des Rauschens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262 Halbleiter { Bauelemente 272.1 Halbleiter und ihre Dotierung . . . . . . . . . . . . . . . . . . . . . . . . 272.2 Die pn Grenzschicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.3 Dioden und ihre Anwendungen . . . . . . . . . . . . . . . . . . . . . . . 34iii

INHALTSVERZEICHNIS iv2.3.1 Reale Kennlinie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.3.2 Dioden als Gleichrichter . . . . . . . . . . . . . . . . . . . . . . . 352.3.3 p.i.n. Dioden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.3.4 Zenerdioden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.4 Bipolare Transistoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.5 Felde�ekt { Transistoren . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.6 Transistoren { Grundschaltungen . . . . . . . . . . . . . . . . . . . . . . 452.6.1 Emitter- oder Sourceschaltung . . . . . . . . . . . . . . . . . . . . 462.6.2 Basis- und Gateschaltungen . . . . . . . . . . . . . . . . . . . . . 512.6.3 Kollektor- und Drainschaltungen . . . . . . . . . . . . . . . . . . 523 Signale und Systeme 553.1 Signale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.2 Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.3 LTI Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.3.1 Betrachtungen im Zeitraum . . . . . . . . . . . . . . . . . . . . . 583.3.2 Betrachtungen im Frequenzraum . . . . . . . . . . . . . . . . . . 593.4 Analyse im Zeitraum: Laplace { Transformationen . . . . . . . . . . . . . 593.4.1 Pole in der �Ubertragungsfunktion . . . . . . . . . . . . . . . . . . 603.5 nichtlineare Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633.6 R�uckkopplung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643.7 Regelkreise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.7.1 Stabilit�at von Regelkreisen . . . . . . . . . . . . . . . . . . . . . . 663.7.2 P { Regler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 683.7.3 PI { Regler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68

INHALTSVERZEICHNIS v3.7.4 PD { Regler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693.7.5 PID { Regler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703.7.6 Reglersymbole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703.7.7 Beispiel Reservoirregelung . . . . . . . . . . . . . . . . . . . . . . 714 Analoge Schaltungstechnik 754.1 Operationsverst�arker: Aufbau und Kennwerte . . . . . . . . . . . . . . . 754.2 Anwendungen von Operationsverst�arker . . . . . . . . . . . . . . . . . . 774.2.1 Operationsverst�arker { Grundschaltungen . . . . . . . . . . . . . 774.2.2 Weitere Operationsverst�arkerschaltungen . . . . . . . . . . . . . . 794.2.3 Realisierung von PI, PD und PID Reglern . . . . . . . . . . . . . 814.2.4 Anwendungen mit Dioden . . . . . . . . . . . . . . . . . . . . . . 824.2.5 Aktive Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 824.2.6 Oszillatoren und PLL . . . . . . . . . . . . . . . . . . . . . . . . . 835 Sensoren 865.1 Licht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 865.1.1 Photovervielfacher . . . . . . . . . . . . . . . . . . . . . . . . . . 875.1.2 Photodioden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 885.1.3 andere Halbleiterphotodetektoren . . . . . . . . . . . . . . . . . . 895.2 Anwendungen von Lichtdetektoren . . . . . . . . . . . . . . . . . . . . . 905.2.1 F�ullstandsanzeiger . . . . . . . . . . . . . . . . . . . . . . . . . . 905.2.2 Drehwinkel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 905.2.3 Neigunswinkelmesser . . . . . . . . . . . . . . . . . . . . . . . . . 915.3 Temperatur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 915.4 Druck und Kr�afte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 925.4.1 Piezoe�ekt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 925.4.2 Dehnungsmessstreifen . . . . . . . . . . . . . . . . . . . . . . . . 92

INHALTSVERZEICHNIS vi6 Elemente der Digitalelektronik 946.1 Digitale Systeme und bits . . . . . . . . . . . . . . . . . . . . . . . . . . 946.2 algebraische Grundlagen der Logik . . . . . . . . . . . . . . . . . . . . . 966.3 Innerer Aufbau von digitalen Bausteinen . . . . . . . . . . . . . . . . . . 996.3.1 Betriebsparameter und Auswahlkriterien, Bezeichnungen . . . . . 996.3.2 Relais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1016.3.3 Dioden und Transistoren . . . . . . . . . . . . . . . . . . . . . . . 1016.3.4 TTL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1026.3.5 Open Collector und Tristate . . . . . . . . . . . . . . . . . . . . . 1036.3.6 ECL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1046.3.7 CMOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1056.3.8 Vergleich der Logikfamilien und {Generationen . . . . . . . . . . 1086.4 Beispiele von digitalen Grundschaltungen . . . . . . . . . . . . . . . . . . 1096.4.1 Halbaddierer und Volladdierer . . . . . . . . . . . . . . . . . . . . 1096.4.2 Flip{Flops . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1106.4.3 Z�ahler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1136.4.4 Schieberegister . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1136.4.5 Synchronisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1147 H�ohere digitale Systeme 1157.1 Finite State Machines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1157.2 Tabellenspeicher . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1177.3 Programmable Logic Devices . . . . . . . . . . . . . . . . . . . . . . . . . 1197.4 Hardware Description Languages . . . . . . . . . . . . . . . . . . . . . . 121

INHALTSVERZEICHNIS vii8 Signal�ubertragung 1248.1 Digitale Signalstandards . . . . . . . . . . . . . . . . . . . . . . . . . . . 1258.1.1 IEEE 488 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1258.1.2 EIA-232 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1268.1.3 Di�erentielle Systeme: RS423, RS 485 und LVDS . . . . . . . . . 1278.2 Pickup, X-talk und Rauschen in der Praxis . . . . . . . . . . . . . . . . . 1299 Datenakquistionssysteme 133

Kapitel 1Strom, Spannung, WiderstandDas Ohm'sche Gesetz stellt die zentrale Grundlage aller elektronischen Anwendungendar. In seiner elementaren Form U = R � I gilt es jedoch nur f�ur zeitlich konstanteSituationen immer. In diesem Kapitel werden als Repetition die komplexe Darstellungvon zeitabh�angigen Str�omen und Spannungen, sowie Widerst�ande dargestellt als kom-plexe Zahlen ausf�uhrlich behandelt. Deren praktische Realisierung besteht aus passivenBauelementen in Form von Widerst�anden, Kondenstoren und Induktivit�aten.Als weitere wichtige Elemente in der Elektronik werden darauf Strom- und Span-nungsquellen diskutiert, jeweils in ihrer idealisierten und realen Form.Mit diesen Begri�en k�onnen schliesslich die Kirchho�'schen Regeln aufgestellt wer-den, welche f�ur die konkrete Berechnung von Schaltungen eine zentrale Rolle spielen.1.1 Komplexe Widerst�ande, passive Bauelemente1.1.1 Komplexe Spannungen und Str�omeSpannungen und Str�ome sind im allgemeinen beliebige zeitabh�angige Funktionen U(t),I(t). Diese k�onnen nach dem Satz von Fourier als (evt. unendlich dicht liegende) Sum-men von harmonischen Funktionen dargestellt werden. Diese werden als komplexe Funk-tionen geschrieben (i := +p�1; i2 = �1; i3 = �i; i4 = 1):gU(t) = U0 � ei(!t+'u) = U0ei'uei!t (1.1)gI(t) = I0 � ei(!t+'I) = I0ei'Iei!t (1.2)1
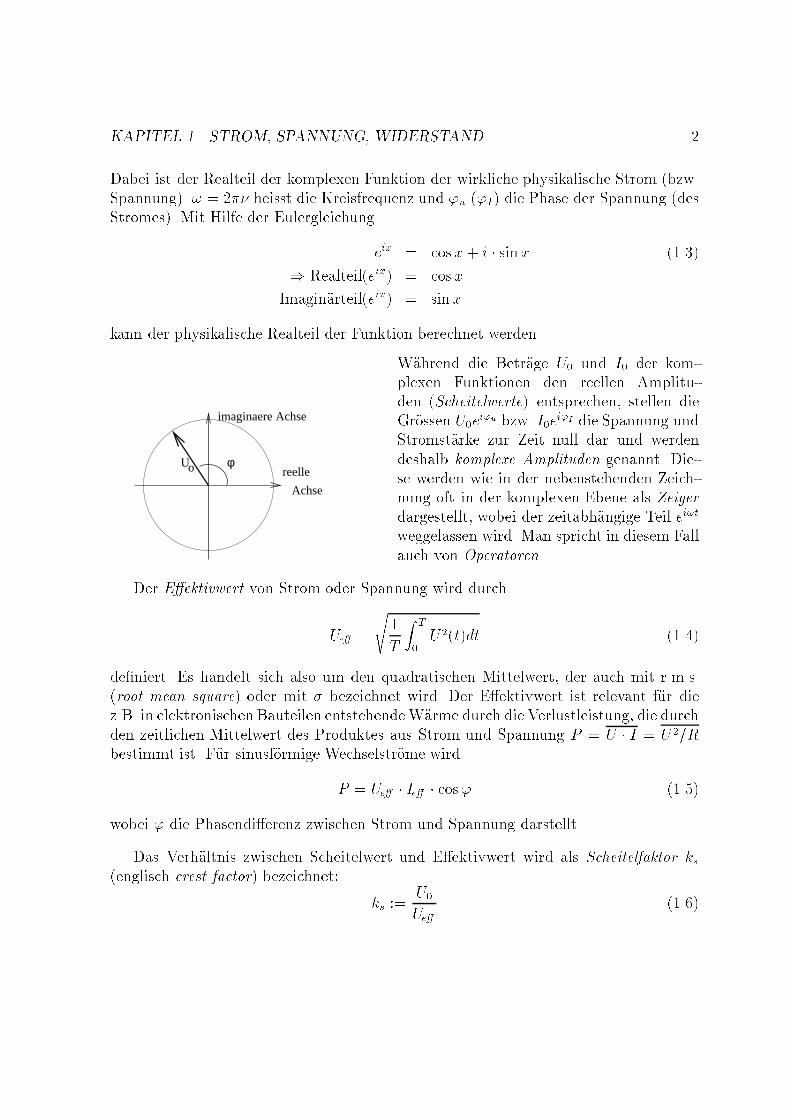
KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 2Dabei ist der Realteil der komplexen Funktion der wirkliche physikalische Strom (bzw.Spannung). ! = 2�� heisst die Kreisfrequenz und 'u ('I) die Phase der Spannung (desStromes). Mit Hilfe der Eulergleichungeix = cosx+ i � sinx (1.3)) Realteil(eix) = cosxImagin�arteil(eix) = sinxkann der physikalische Realteil der Funktion berechnet werden.imaginaere Achse
reelle
Achse
φUo
W�ahrend die Betr�age U0 und I0 der kom-plexen Funktionen den reellen Amplitu-den (Scheitelwerte) entsprechen, stellen dieGr�ossen U0ei'u bzw. I0ei'I die Spannung undStromst�arke zur Zeit null dar und werdendeshalb komplexe Amplituden genannt. Die-se werden wie in der nebenstehenden Zeich-nung oft in der komplexen Ebene als Zeigerdargestellt, wobei der zeitabh�angige Teil ei!tweggelassen wird. Man spricht in diesem Fallauch von Operatoren.Der E�ektivwert von Strom oder Spannung wird durchUe� = s 1T Z T0 U2(t)dt (1.4)de�niert. Es handelt sich also um den quadratischen Mittelwert, der auch mit r.m.s.(root mean square) oder mit � bezeichnet wird. Der E�ektivwert ist relevant f�ur diez.B. in elektronischen Bauteilen entstehendeW�arme durch die Verlustleistung, die durchden zeitlichen Mittelwert des Produktes aus Strom und Spannung P = U � I = U2=Rbestimmt ist. F�ur sinusf�ormige Wechselstr�ome wirdP = Ue� � Ie� � cos' (1.5)wobei ' die Phasendi�erenz zwischen Strom und Spannung darstellt.Das Verh�altnis zwischen Scheitelwert und E�ektivwert wird als Scheitelfaktor ks(englisch crest factor) bezeichnet: ks := U0Ue� (1.6)

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 3F�ur sinusf�ormige Wechselspannungen ist ks = p2. In Wechselspannungs{Leistungs-versorgungen, wie zum Beispiel dem �o�entlichen Netz, werden jeweils die E�ektiv-werte angegeben: Ue� = 230V. F�ur andere Kurvenformen ist der Scheitelfaktor ver-schieden, zum Beispiel ks = 1 f�ur Rechteckspannungen, ks = p3 f�ur Dreieck- oderS�agezahnschwingungen (Angaben jeweils f�ur Spannungen, die symmetrisch zu null sind).1.1.2 Das Ohm'sche GesetzDas Verh�altnis zwischen Potentialunterschied (Spannung) an den Anschl�ussen einesbeliebigen Elementes und dem Strom de�niert den Widerstand eZ:eZ := eUeI (1.7)Das Ohm'schen Gesetz besagt dabei, dass eZ eine zeitunabh�angige komplexe Gr�osse ist.Sie heisst die Impedanz. Man schreibteZ = R + iX; eZ = Z0ei' (1.8)wobei R der Wirkwiderstand, X der Blindwiderstand und Z0 der Scheinwiderstand ge-nannt werden. Das Inverse der Impedanz 1= eZ heisst auch der Scheinleitwert oder dieAdmittanz.Betrachten wir eine harmonische Komponente wie in 1.1 und 1.2, erhalten wir:eZ = U0 � ei(!t+'u)I0 � ei(!t+'I) = U0I0 � ei' mit ' = 'u � 'I (1.9)Die komplexe Phase der Impedanz stellt also gerade die Phasendi�erenz zwischen Stromund Spannung dar. Da R = Z0 cos' werden vor allem bei Leistungsger�aten wie Motorenusw. oft Z0 (oder Ue� und Ie� ) zusammen mit dem Kosinusphi (z.B. cos' = 0:7)spezi�ziert. Diese Angaben machen nat�urlich nur f�ur eine harmonische Spannung mitbestimmter Frequenz Sinn.F�ur komplexe Widerst�ande gelten die gleichen Regeln f�ur Parallel- und Serieschal-tung wie bei reellenWiderst�anden: Bei der Serieschaltung addieren sich die Widerst�ande(oder die Inversen der Leitwerte).Z Z1 2
In der Parallelschaltung addieren sich die Leitwerte und somitdie Inversen der Widerst�ande, es gilt also:gZtot = fZ1 � fZ2fZ1 + fZ2 =: fZ1kfZ2 (1.10)womit wir die Operation k de�nieren, die sehr oft ben�otigt wird.

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 4(Im folgenden lassen wir die Tilden auf den komplexen Gr�ossen im allgemeinen weg,meinen aber bei Strom, Spannung und Widerstand stets die komplexen Darstellungen.)1.1.3 Reelle Widerst�ande, Induktivit�aten, Kapazit�atenAlle passiven linearen elektrischen Netzwerke k�onnen aus den drei Grundzweipolen re-eller Widerstand, Induktivit�at und Kapazit�at aufgebaut werden.Relle Widerst�ande (auch ohm'sche Widerst�ande genannt) erzeugen keine Phasendif-ferenzen zwischen Spannung und Strom, es giltZR = U0I0 = R: (1.11)F�ur Induktivit�aten gilt UL = L � @I@t (1.12)Bei einem zeitabh�angigen Strom I = I0ei!t entsteht eine magnetisch induzierte Span-nung. Durch die Ableitung erscheint ein Faktor i!, die Impedanz ZL und deren Betrag,der Scheinwiderstand Z0L, betragen demnachZL = ULI = i � !L; Z0L = !L (1.13)Die Impedanz ZL ist eine positiv imagin�are Zahl, der Phasenwinkel betr�agt demnach90� . \Der Strom eilt der Spannung um 90� nach".F�ur Kapazit�aten gilt UC = 1C �Q; Q = Z I(t) � dt (1.14)Mit einem Strom I = I0ei!t wird der Kondensator geladen. Durch die Integrationdes Stromes erscheint ein Faktor 1=i!, die Impedanz ZC und deren Betrag, der Schein-widerstand Z0C, betragen ZC = UCI = 1i!C ; Z0C = 1!C (1.15)Die Impedanz ZC ist eine negative imagin�are Zahl (1=i = �i). Die Spannung eilt demStrom um 90� nach (' = �90� ).

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 5�Andert der Strom in einen Kondensator nur langsam, so kann die Gleichung 1.14vereinfacht werden zu UC = I � tC f�ur I � const : (1.16)der sogenannten Kondensatorgleichung. Sie ist f�ur viele Absch�atzungen sehr n�utzlichund zeigt, dass sich die Spannung bei konstantem Strom linear mit der Zeit �andert.Kombinationen von R, L, CKombinationen der Grundzweipole k�onnen leicht mit dem Ohm'schen Gesetz und denRechenreglen der komplexen Zahlen berechnet werden. Wir wollen am ersten Beispieldes Tiefpasses auch verschiedene Begri�e des Systemverhaltens kennenlernen. Tief- undHochpass sind elementare Schaltungen, die �uberall in der Elektronik sehr h�au�g vor-kommen, deshalb ist die folgende Behandlung etwas ausf�uhrlich.Beispiel Tiefpass:U Uin out
R
C
Bei grossen Frequenzen wird der Scheinwiderstand ZC der Ka-pazit�at immer kleiner. Die Schaltung wirkt als Spannungstei-ler, sodass die Ausgangsspannung umso kleiner wird, je h�oherdie Frequenz. Bei tiefen Frequenzen wird ZC gross, und dieAusgangsspannung wird gleich der Eingangsspannung.Der gesamte Widerstand des Tiefpasses errechnet sich zu (Serieschaltung!) Z =R + 1=i!C, der Strom wird nach dem Ohm'schen Gesetz I = Uin=Z und die Aus-gangsspannung (die Spannung am Kondensator) Uout = I � 1=i!C. Das Verh�altnisvon Ausgangs- zu Eingangsspannung bezeichnet man auch als �UbertragungsfunktionG. Stellt man diese f�ur harmonische Eingangsspannungen als Funktion der Frequenzdar, spricht man auch vom (komplexen) Frequenzgang G(!).G := UoutUin G(!) = Uout(!)Uin(!) (1.17)F�ur unseren Tiefpass wird alsoG(!) = I � 1=i!CZ � I = 11 + i!RC (1.18)In der Praxis stellt man Betrag und Argument der komplexen Zahl G(!) gra�sch imsogenannten Bodediagramm dar. Der Betrag jG(!)j wird auch als Amplitudengang be-zeichnet und wird im Bodediagramm doppelt logarithmisch als Funktion von !, das
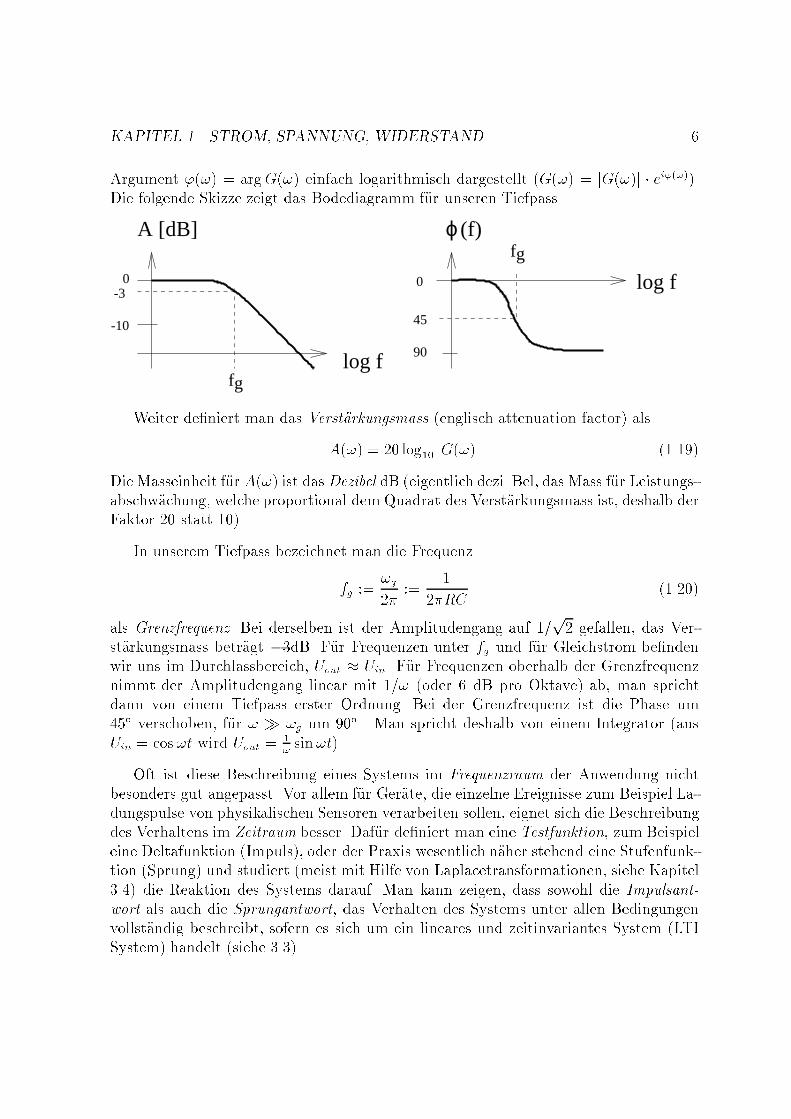
KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 6Argument '(!) = argG(!) einfach logarithmisch dargestellt (G(!) = jG(!)j � ei'(!)).Die folgende Skizze zeigt das Bodediagramm f�ur unseren Tiefpass.fg
log f
fgA [dB]
-10
0-3
ϕ (f)
log f0
45
90Weiter de�niert man das Verst�arkungsmass (englisch attenuation factor) alsA(!) = 20 log10 jG(!)j (1.19)Die Masseinheit f�ur A(!) ist das Dezibel dB (eigentlich dezi{Bel, das Mass f�ur Leistungs-abschw�achung, welche proportional dem Quadrat des Verst�arkungsmass ist, deshalb derFaktor 20 statt 10).In unserem Tiefpass bezeichnet man die Frequenzfg := !g2� := 12�RC (1.20)als Grenzfrequenz. Bei derselben ist der Amplitudengang auf 1=p2 gefallen, das Ver-st�arkungsmass betr�agt �3dB. F�ur Frequenzen unter fg und f�ur Gleichstrom be�ndenwir uns im Durchlassbereich, Uout � Uin. F�ur Frequenzen oberhalb der Grenzfrequenznimmt der Amplitudengang linear mit 1=! (oder 6 dB pro Oktave) ab, man sprichtdann von einem Tiefpass erster Ordnung. Bei der Grenzfrequenz ist die Phase um45� verschoben, f�ur ! � !g um 90� . Man spricht deshalb von einem Integrator (ausUin = cos !t wird Uout = 1! sin !t).Oft ist diese Beschreibung eines Systems im Frequenzraum der Anwendung nichtbesonders gut angepasst. Vor allem f�ur Ger�ate, die einzelne Ereignisse zum Beispiel La-dungspulse von physikalischen Sensoren verarbeiten sollen, eignet sich die Beschreibungdes Verhaltens im Zeitraum besser. Daf�ur de�niert man eine Testfunktion, zum Beispieleine Deltafunktion (Impuls), oder der Praxis wesentlich n�aher stehend eine Stufenfunk-tion (Sprung) und studiert (meist mit Hilfe von Laplacetransformationen, siehe Kapitel3.4) die Reaktion des Systems darauf. Man kann zeigen, dass sowohl die Impulsant-wort als auch die Sprungantwort, das Verhalten des Systems unter allen Bedingungenvollst�andig beschreibt, sofern es sich um ein lineares und zeitinvariantes System (LTISystem) handelt (siehe 3.3).

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 7= R Cτ
U0
U0
t0
Die Antwort auf einen Spung derH�ohe U0 unseres Tiefpasses ist of-fensichtlich gegeben durchUout = U0 � (1 � e� tRC ) (1.21)wie in der nebenstehenden Skizzedargestellt.In der Elektronik mussman h�au�g endliche Anstiegszeiten von Spannungen beschrei-ben, die eigentlich Sprungfunktionen w�aren. Man gibt dabei meistens die 10-90 Zeit an,also die Zeit, die es braucht, bis das Signal von 10% bis auf 90% seines endg�ultigenWertes gestiegen ist. Man berechnet leicht und merke sich, dass bei einem Tiefpass dieAnstiegszeit ta � 2:2� � 13fg (1.22)betr�agt. Zum Beispiel ben�otigen wir f�ur die Beobachtung von Signalen mit einer An-stiegszeit von 1 ns einen Oszillographen mit einer Grenzfrequenz von mindestens 330MHz. 12.10.98Der Tiefpass eignet sich ebenfalls als gleitender Mittelwertbildner mit der charakte-ristischen Zeit � = RC. Schnellere �Anderungen werden im Kondensator au�ntegriert,lansamere �Anderungen werden �ubertragen. Man kann also Tiefp�asse f�ur die Gl�attungvon unruhigen oder mit h�oheren Frequenzen verrauschten Signalen einsetzen.Beispiel HochpassU Uin out
RC
Bei kleinen Frequenzen wird die Impedanz der Kapa-zit�at immer gr�osser, sodass die Ausgangsspannung klei-ner wird. Bei grossen Frequenzen wird die Impedanzklein, sodass die Ausgangsspannung gleich der Eingangs-spannung wirdDie Gesamtimpedanz des Hochpass ist gleich wie beim Tiefpass Z = R+1=i!C, nachdem Ohm'schen Gesetz wird I = Uin=Z. Die Ausgangsspannung ist aber nun einfachUout = I �R, sodass der Frequenzgang der SchaltungG(!) = UoutUin = 11 + 1i!RC (1.23)

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 8wird. Das Bodediagramm ist gegen�uber dem Tiefpass an der Grenzfrequenz gespiegelt:fg
log f fg
A [dB]
-10
0-3
ϕ (f)
0
45
90
log fF�ur sehr kleine Frequenzen wird also aus Uin = sin!t ein Uout = ! cos!t, derHochpass wirkt bei kleinen Frequenzen also di�erenzierend.= R Cτ
U0
U0
t0
Die Sprungantwort nach einem Hoch-pass veranschaulicht ebenfalls die dif-ferenzierende Eigenschaft. Aus einerSprungfunktion wird angen�ahert einImpuls: Uout = U0 e� tRC (1.24)Der Hochpass kommt insbesondere dort zur Anwendung, wo von einem Signal einGleichspannungsanteil entkoppelt werden muss. Zum Beispiel muss ein Proportional-z�ahlrohr mit einer statischen Hochspannung betrieben werden, von der die Verst�arker-elektronik mittels eines Hochpasses entkoppelt wird.Ein anderes Beispiel ist die sogenannte AC-Kopplung. Dabei wird mit einem Hoch-pass, dessen Grenzfrequenz so tief sein muss, dass er die interssanten Signale durchl�asst,die Gleichspannungskomponente entkoppelt. Die meisten Oszilloskope haben einen AC{ DC Schalter, mit dessen Hilfe sich ein solcher Hochpass in den Signalpfad schaltenl�asst.Beachte: Bei all diesen Betrachtungen wurde angenommen, dass der Ausgang derSchaltung unbelastet ist. Wird eine Last, zum Beispiel der Eingangswiderstand einesnachfolgenden Verst�arkers oder auch nur ein l�angeres Kabel angeschlossen, so mussdessen komplexe Impedanz nat�urlich in die Rechnung eingeschlossen werden. Es ergebensich dann Situationen wie sie im folgenden Beispiel gerechnet sind:
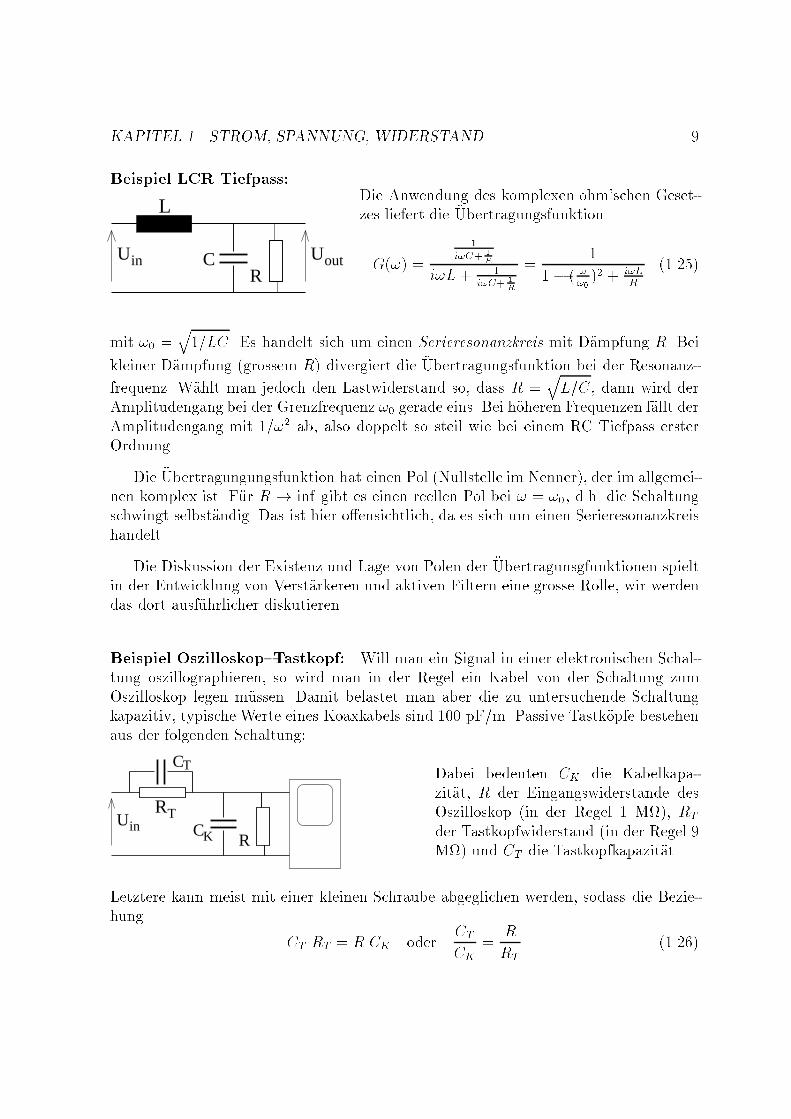
KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 9Beispiel LCR Tiefpass:Uin UoutC
R
LDie Anwendung des komplexen ohm'schen Geset-zes liefert die �UbertragungsfunktionG(!) = 1i!C+ 1Ri!L+ 1i!C+ 1R = 11� ( !!0 )2 + i!LR (1.25)mit !0 = q1=LC. Es handelt sich um einen Serieresonanzkreis mit D�ampfung R. Beikleiner D�ampfung (grossem R) divergiert die �Ubertragungsfunktion bei der Resonanz-frequenz. W�ahlt man jedoch den Lastwiderstand so, dass R = qL=C, dann wird derAmplitudengang bei der Grenzfrequenz !0 gerade eins. Bei h�oheren Frequenzen f�allt derAmplitudengang mit 1=!2 ab, also doppelt so steil wie bei einem RC Tiefpass ersterOrdnung.Die �Ubertragungungsfunktion hat einen Pol (Nullstelle im Nenner), der im allgemei-nen komplex ist. F�ur R ! inf gibt es einen reellen Pol bei ! = !0, d.h. die Schaltungschwingt selbst�andig. Das ist hier o�ensichtlich, da es sich um einen Serieresonanzkreishandelt.Die Diskussion der Existenz und Lage von Polen der �Ubertragunsgfunktionen spieltin der Entwicklung von Verst�arkeren und aktiven Filtern eine grosse Rolle, wir werdendas dort ausf�uhrlicher diskutieren.Beispiel Oszilloskop{Tastkopf: Will man ein Signal in einer elektronischen Schal-tung oszillographieren, so wird man in der Regel ein Kabel von der Schaltung zumOszilloskop legen m�ussen. Damit belastet man aber die zu untersuchende Schaltungkapazitiv, typische Werte eines Koaxkabels sind 100 pF/m. Passive Tastk�opfe bestehenaus der folgenden Schaltung:
UinR
C
RT
KC
T Dabei bedeuten CK die Kabelkapa-zit�at, R der Eingangswiderstande desOszilloskop (in der Regel 1 M), RTder Tastkopfwiderstand (in der Regel 9M) und CT die Tastkopfkapazit�at.Letztere kann meist mit einer kleinen Schraube abgeglichen werden, sodass die Bezie-hung CT RT = R CK oder CTCK = RRT (1.26)

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 10erf�ullt ist. In diesem Fall sind die Argumente der komplexen Widerst�ande im Tastkopfund am Oszilloskop gleich, es ergibt sich keine Phasenverschiebung. Damit wird dasSpannungsteilerverh�altnis von der Frequenz unabh�angig und die Gesamtbelastung be-tr�agt nur 10 M und einige wenige pF. Ab Frequenzen von etwa 1=2�RC � 100kHzwerden allerdings trotzdem die Kondensatoren die Gesamtimpedanz der Messanord-nung bestimmen, wobei diese mit 1=! abnimmt. F�ur hochfrequentere Anwendungenmuss man deshalb aktive Tastk�opfe verwenden (FET Eingangsschaltung).Beispiel Wien{Br�ucke~
Z Z
ZZx
0 1
2
Die Wienbr�ucke besteht aus vier im allgemeinen komplexen Wi-derst�anden, die wie in der nebenstehenden Zeichung angeordnet wer-den. Ist die in der Mitte gemessene Spannung null, spricht man voneiner abgeglichenen Br�ucke. Dies ist der Fall unter der Bedingung:Z0Zx = Z1Z2 (1.27)Dies ist eine komplexe Gleichung, es m�ussen also sowohl Real- wie auch Imagin�arteilder Impedanzen diese Bedingung erf�ullen. Im allgemeinen wird die Bedingung nur f�ureine bestimmte Frequenz erf�ullt.Die Wienbr�ucke wird zur pr�azisen Messung von komplexen Impedanzen verwendet.In der Regel verwendet man f�ur Z1 und Z2 reelle Widerst�ande und f�ur Z0 eine An-ordnung von Grundzweipolen die der Ersatzschaltung der unbekannten Impedanz Zxentspricht.xR
0R
~
1
2
R
RCx
0C
Die Schaltung zeigt eine Kapazit�atsmessbr�ucke, die es erlaubt, sowohldie Kapazit�at als auch der reelle Anteil der Impedanz eines Kon-densators zu bestimmen. Die Amplitude im gemessenen Di�erenzsi-gnal wird nur null, wenn beide Abgleichwiderst�ande richtig eingestelltsind: 1i!C0 +R01i!Cx +Rx = R1R2 (1.28)Die Abgleichbedingung ist nur dann f�ur alle Frequenzen erf�ullt, wenn ausserdem diebeiden Zeitkonstanten gleich (RxCx = R0C0) sind. Dann wird:Cx = C0R1R2 und Rx = R0R2R1 (1.29)Falls sich in der Messung keine frequenzunabh�angige Abgleichbedingung �nden l�asst,deutet das auf eine unvollst�andige oder falsche Ersatzschaltung hin.

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 111.1.4 BauformenLeider k�onnen ideale R, L und C Elemente nicht gebaut werden. Neben Toleranzen inihren Widerstandswerten m�ussen wir auch in Kauf nehmen, dass reale Bauelemente nierein reell oder imagin�ar sind. So haben Anschl�usse aller Bauelemente eine Induktivit�atund einen reellen, endlichen Widerstandswert. Ausserdem gibt es immer zwischen denAnschl�ussen eine Kapazit�at.Reale Bauelemente werden deshalb durch ein Ersatzschaltbild beschrieben, das ausidealen R, L und C Elementen besteht, und dessen Schaltung das Verhalten des realenBauelementes hinreichend genau beschreibt.Grunds�atzlich unterschiedet man Bauelemente mit Drahtanschl�ussen f�ur normalePlatinenmontage und SMD (surface mounted devices) f�ur die SMT (Surface moun-ted technology), die nur Anschluss �achen besitzen, und dann auf direkt auf die Ober- �ache von Leiterplatten oder Keramiksubstanzen montiert werden. Letztere Technikeignet sich vor allem viel besser f�ur automatische Best�uckungs- und L�otverfahren. DieSMT l�oste einen weiteren Miniaturisierungsschub aus. Sie hat g�unstigere Hochfrequen-zeigenschaften (kleinere Abmessungen, kleinere Anschlussinduktivit�aten und Streuka-pazit�aten), wegen der Automatisierung kleinere Best�uckungsfehlerraten und kleinereHerstellungskosten.F�ur den Laborbetrieb muss man allerdings in Kauf nehmen, dass es viel m�uhsamerist, kleine Modi�kationen vorzunehmen. Deshalb ist gerade bei Einzelst�ucken im Expe-rimentierbetrieb die konventionelle Technik manchmal zu bevorzugen.F�ur die SMT muss beachtet werden:� W�armeproduktion kritischer) verlustarme Techniken verwenden!� Gr�ossere Bauteile haben manchmal geometrische W�armeausdehungskoe�ziten,die verschieden sind vom Platinenmaterial� Im Gegensatz zur herk�ommlichen Technik muss man in der Mehrlagenplatine inden inneren Ebenen keine R�ucksicht auf die Anschl�usse der Bauteile nehmen, diePlatinen k�onnen leicht auf beiden Seiten best�uckt werden.Die SMD's werden vor dem L�oten mit Klebern �xiert. Dann wird das bereits sichauf der Platine be�ndliche Lot in einem heissen Dampf erhitzt (typisch 215� C) und soin ca. 10 bis 30 sec. verl�otet.Handl�oten geht auch, erfordert aber schon eine ruhige Hand: L�otkolben auf 300�C stellen, Leiterbahn erhitzen nicht Bauelement, warten bis Zinn auf das Bauelementge ossen ist, nicht la�nger als 3 Sekunden, sonst werden die Bauelemente zerst�ort.

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 12Bauformen von Widerst�anden(siehe auch [N�uhr98], Kapitel 3)F�ur die Auswahl vonWiderst�anden f�ur eine bestimmteAnwendung sind neben ihremWiderstandswert folgende Faktoren relevant:� Belastbarkeit (maximale Leistung): Typische Werte sind 1/8, 1/4 oder 1/2 Watt,sie sind direkt proportional zur Bau gr�osse. SMD Widerst�ande sind in der Regelmit 1/4 Watt belastbar.� Maximalspannung� Herstellungsgenauigkeit. Typische Werte sind �5% im Normalfall. Pr�azisions-widerst�ande k�onnen bis �0.5% gehen.� Rauschen. Neben dem konstruktionsunabh�angigen thermischen Rauschen (siehe1.6) gibt es auch das Stromrauschen (1/f Rauschen), das vomMaterial und Aufbaudes Bauelementes abh�angt.� Temperaturstabilit�at. Man gibt den Temperaturkoe�zient in ppm/K an.� MontagetechnikDer Widerstandswert und die Toleranzen werden mittels Farbringen nach dem Re-genbogenschema auf die Widerst�ande aufgebracht. SMD Widerst�ande werden nach dem\WWP" Code (Zi�er, Zi�er, Exponent) bezeichnet: z.B. 471 = 470 . Die geometrischeGr�osse wird mit einer vierstelligen Zahl bezeichnet, wobei die ersten zwei Zi�ern L�angeund die zweiten zwei Zi�ern die Breite in Einheiten von 1/100 inch angeben. Nat�urlichgibt es auch eine DIN Norm in mm, ausserdem ist dort die Reihenfolge umgekehrt...Widerstandswerte werden in den sogenannte E-Reihen mit ungef�ahr logarithmischenAbst�anden produziert. Am h�au�gsten ist die Reihe E24, das heisst es gibt 24 verschie-denen Werte pro Dekade (100, 110, 120, 130, 150, 160, 180 usw.).Die Widerstandsschicht kann aus Kohle, Cr/Ni, Gold, Platin oder Metalloxid (SnO2)bestehen. Kohle hat einen negativen widerstandswertabh�angigen, Metalle einen posi-tiven Temperaturkoe�zienten, der vorallem bei Platin sehr genau konstant gehatenwerden kann. Deshalb werden Platinwiderst�ande als Temperaturf�uhler eingesetzt.Kohlewiderst�ande halten die h�ochsten kurzzeitigen Spannungsspitzen und es gibt sieauch f�ur sehr hohe Werte (Standardwerte bis 22 M). Sie haben eine relativ schlechteFertigungstoleranz, daf�ur aber meist ein besseres Hochfrequenzverhalten (unter 200

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 13induktiv, dar�uber kapazitiv). Trotzdem sind die E�ekte noch gross, z.B. hat ein typi-scher 10 M Widerstand bei 100 MHz noch eine Impedanz von 10k ! Deshalb undauch wegen den Streukapazit�aten m�ussen Hochfrequenzanwendungen immer niederoh-mig ausgelegt werden. 14.10.98Nickel-Chrom Drahtwiderst�ande sind hochpr�azis (bis 0.05 %) und sehr temperatur-stabil (bis 5 ppm/K) aber nicht besonders klein. Durch geschicktes Wickeln kann manauch die Indutivit�at in Grenzen halten.Beispiel 4{Draht{Messung:R
R
x
K
Die sogenannte Kelvinschaltung ist im nebenstehen-den Bild dargestellt. Die Widerst�ande der Kabel RKverf�alschen bei einer gew�ohnlichen Widerstandsmessungden Messwert. F�uhrt man nun den Strom aus einer Kon-stantstromquelle in einer separaten Leitung demWider-stand zu, und misst dann auf einer anderen Leitung denSpannungsabfall an Rx, wird das Resultat unabh�angigvon den Widerst�anden RK .NichtlineareWiderst�ande: Imweiteren gibt es drei verschiedeneKlassen von nicht-linearen Widerst�anden, n�amlich PTC, NTC und VDR. NTC haben einen negativenTemperaturkoe�zient von etwa 2 bis 6%/� K. PTC haben positive Temperaturkoe�-zienten im Bereich von 5 bis 70%/� K. NTC und PTC werden auch unter dem Begri�Thermistoren zusammengefasst und werden als Temperatursensoren f�ur Regler allerArt verwendet. PTC's im Stromversorgungskreis eignen sich auch direkt als thermi-scher �Uberlastschutz: Wird das Ger�at zu heiss, nimmt die Stromzufuhr automatischab.VDR (Voltage dependant resistor) �andern ihren Widerstand in Funktion der Span-nung und bestehen meist aus Zinkoxid. Der Widerstand nimmt exponentiell mit derSpannung ab und die Reaktionszeit daf�ur betr�agt nur wenige ns, sodass sich VDR sehrgut als Spannungsstossbegrenzer (z.B. wenn Induktivit�aten im Schaltkreis vorhandensind) und �Uberspannungsschutz eignen. VDR gibts mit Kniespannungen von etwa 10bis 700 V.Bauformen von KondensatorenKondensatoren bestehen im Prinzip aus zwei leitenden Fl�achen mit Isolationsmateri-al dazwischen mit m�oglichst grosser Dieelektrizit�atskonstante �. Als Isolationsmaterial

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 14verwendet man Luft, Keramik, Kunststo�folien, Glimmer, Papier und Elektrolyte.Im Ersatzschaltbild m�ussen Serieinduktivit�at des Anschlusses (typisch 1 nH promm), Seriewiderstand und der parallele Isolationswiderstand ber�ucksichtigt werden.Die Kondensatoren werden charakterisiert durch� Kapazit�atswert (von pF bis mF) und Toleranz (1 bis 20%)� maximaleBetriebsspannung, sowohl f�ur Gleichspannung (Nennspannung) als auchf�ur den �uberlagerten Wechselspannungsanteil (Spitzenspannung).� Verlustfaktor wegen des Seriewiderstandes (tan � = !RC), gleichzeitig das Ver-h�altnis von Wirk- zu Blindleistung. Typische Werte gehen von 10�3 bis 0.5F�ur h�ochste Frequenzen und kleineKapazit�aten werden Keramikkondensatoren (TypI, � � 100) verwendet. Typische Verlustfaktoren liegen bei 0:3 � 10�3, der Isolationswi-derstand ist in der Gr�ossenordnung von 1010 . F�ur die Induktivit�at gehen nur dieAnschlussdr�ahte und die Baul�ange der Kapazit�at ein (1 nH/mm), sodass auch f�ur meh-rere 100 MHz der Scheinwiderstand noch durch die Kapazit�at dominiert bleibt (SMDist noch g�unstiger!). Diese Kondensatoren haben die h�ochste Pr�azision und die besteStabilit�at. Es sind Werte bis etwa 1 nF erh�altlich.Keramikkondensatoren Typ II haben ein � > 1000 und sind deshalb weniger pr�azisund weniger stabil, sie haben auch gr�ossere Verluste. Sie sind im Wertebereich bis 0.2�F erh�altlichIm Kapazit�atsbereich von 1 nF bis 1�F werden bevorzugt Folienkondensatoren ein-gesetzt, die entweder aus aufgewickelten Isolationsfolien (Kennbuchstabe K f�ur Kunst-sto� oder P f�ur Papier) bestehen, die mit Metall bedampft sind (vorangestellter Kenn-buchstabe M), oder es werden eine Metallfolien und eine Isoationsfolie zusammenaufge-wickelt. Ein weiterer Buchstabe gibt die Art des Kunststo�es an. z.B. besteht ein MKSKondensator aus eine Kunststo�dielektrikum aus Polystyrol mit metallischen Bel�agen.Es werden Verlustfaktoren bis 10�4 erreicht. Die aufgrund der aufgewickelten Folie undden Anschlussleitungen e�ektiv vorhandene Serieinduktivit�at f�uhrt zu einem Seriere-sonanzkreis mir Eigenfrequenz im Bereich von 10 bis 100 MHz (kleiner bei gr�ossererKapazit�at).Elektrolyt- und Tantalelektrolyt Kondenstoren werden f�ur gr�ossere Kapazit�atswerteverwendet. Der Isolationswiderstand ist schlechter, gesamthaft werden Verlustfaktorenim Bereich 10�2 bis 1 erreicht, die Resonanzfrequenzen liegen in der Gr�ossenordnung100 kHz.

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 15Elektolytkondensatoren sind polarisiert, d.h. sie funktionieren nur bei einem Vorzei-chen der Spannung. Einer der beiden Anschl�usse ist deshalb mit einem +, manchmalauch mit einem dicken Strich gekennzeichnet, der den positiven Anschluss bezeichnet.Wird ein solcher Kondensator mit einem falschen Vorzeichen betrieben, sind Kapazit�atund Verlustfaktor v�ollig anders, bei zu hoher negativer Spannung p egt er sich spontanin seine Einzelteile zu zerlegen.1.2 Strom- und SpannungsquellenUm einen Stromkreis zu betreiben, braucht man mindestens entweder eine Spannungs-oder eine Stromquelle. Ideale Stromquellen liefern immer den gleichen Strom undabh�angigvon der an den Anschl�ussen auftretetender Spannung. Ideale Spannungsquellen lieferneine konstante Spannung, unabh�angig vom iessenden Strom.-
+V
Die symbolische Darstellung einer idealen Spannungs-und Stromquelle1.2.1 Reale und lineare Strom- und SpannungsquellenIdeale Strom- und Spannungsquellen existieren nicht, schon deswegen weil sie ein un-endliches Energiereservoir darstellen w�urden.Die Spannung einer realen Spannungsquelle (z.B. einer Batterie) ist abh�angig vondem abgegebenen Strom. Die Spannung an den Anschl�ussen, die sogenannte Klem-menspannung Uk sinkt mit zunehmendem Strom. Man sagt auch: Die Spannung brichtzusammen, wenn man die Spannungsquelle belastet.Eine etwas realistischere, aber immer noch nicht reale, sogenannte lineare Span-nungsquelle wird durch ein Ersatzschaltbild beschrieben, das aus einer ideale Span-nungsquelle mit einem (im allgemeinen Fall komplexen) Innenwiderstand Ri besteht:

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 16-
+
UK
R i
0U
I
Leerlaufspannung
Kurzschluss-strom
KU
Die Ausgangsspannung UK nimmt nach dem ohm'schenGesetz linear mit dem Stromab: UK = U0�RiI. Den Zusammenhang zwischen Strom und Spannung an einer Quellenennt man allgemein die Ausgangskennlinie, die f�ur unsere Spannungsquelle im rech-ten Bild skizziert ist. Bei Kurzschluss, d.h. bei UK = 0, iesst der KurzschlussstromIk = U0=Ri. Eine Spannungsquelle nennt man niederohmig (resp. hochohmig), wenn ihrInnenwiderstand Ri klein (resp. gross) ist. Fliesst kein Strom, spricht man von Leerlauf,dann wird UK = U0.Lineare Stromquellen haben einen Innenwiderstand, der parallel zur Stromquelleliegt:R i
I
U
IqKurzschluss
LeerlaufDer Ausgangsstrom nimmt bei h�oherer Spannung ab, da nun ein immer gr�osererTeil des Stromes durch den Innenwiderstand iesst. Es ergibt sich ebenfalls eine lineareKennlinie. Im Kurzschluss iesst der Quellenstrom Iq, im Leerlauf betr�agt die SpannungU = IqRi. Eine gute Stromquelle ist besonders hochohmig.Da die beiden Kennlinien beide linear sind, kann man deren Ersatzschaltbilderdurcheinander ersetzen: Eine Stromquelle Iq mit Innenwiderstand Ri ist identisch zueiner Spannungsquelle mit Leerlaufspannung U0 = IqRi und gleichem (!) Innenwider-stand Ri.Praktische Spannungs- bzw. Stromquellen haben h�ochstens in einem einge-schr�ankten Bereich der Ausgangskennlinie eine lineare Charakteristik. Das Ausgangssi-
KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 17gnal einer Verst�arkerschaltung zum Beispiel kann bei kleiner Last einen relativ kleinenInnenwiderstand haben. Bei sehr grossen Str�omen nimmt der Innenwiderstand oft zu,sodass man eine nichtlineare Ausgangskennline bekommt.linearisierte
I
Kennlinie
wahre Kennlinie
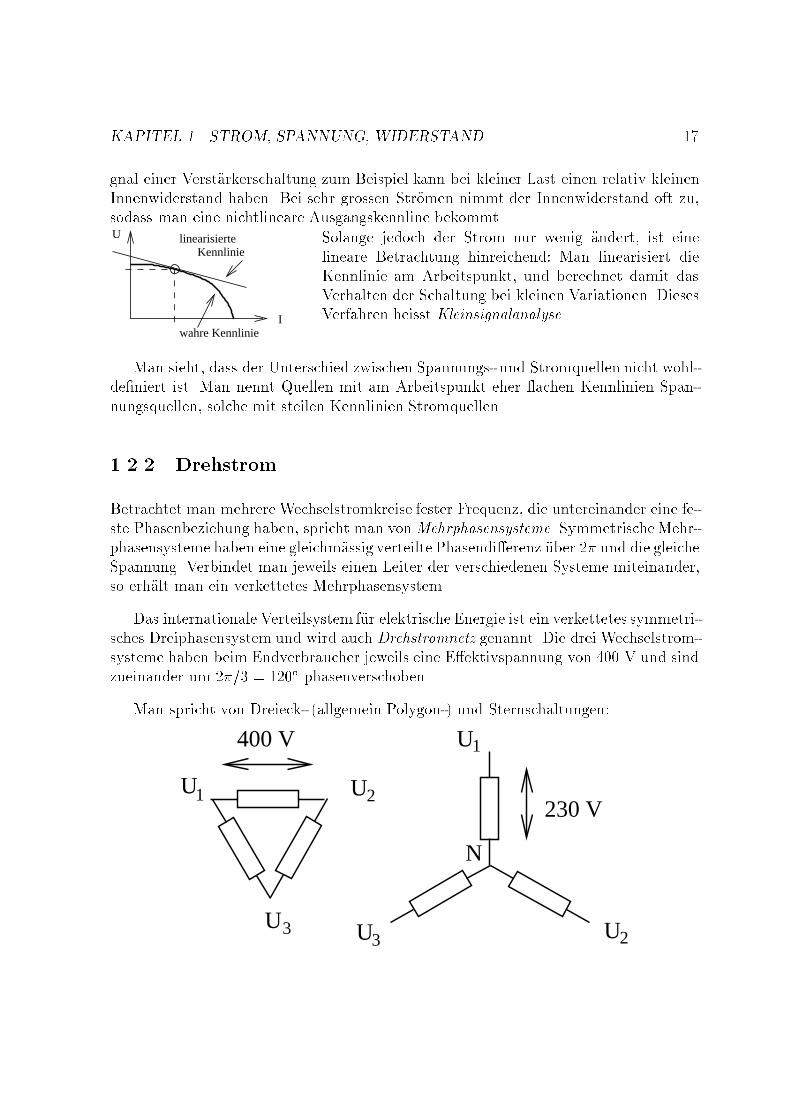
U Solange jedoch der Strom nur wenig �andert, ist einelineare Betrachtung hinreichend: Man linearisiert dieKennlinie am Arbeitspunkt, und berechnet damit dasVerhalten der Schaltung bei kleinen Variationen. DiesesVerfahren heisst Kleinsignalanalyse.Man sieht, dass der Unterschied zwischen Spannungs- und Stromquellen nicht wohl-de�niert ist. Man nennt Quellen mit am Arbeitspunkt eher achen Kennlinien Span-nungsquellen, solche mit steilen Kennlinien Stromquellen.1.2.2 DrehstromBetrachtet man mehrere Wechselstromkreise fester Frequenz, die untereinander eine fe-ste Phasenbeziehung haben, spricht man vonMehrphasensysteme. SymmetrischeMehr-phasensysteme haben eine gleichm�assig verteilte Phasendi�erenz �uber 2� und die gleicheSpannung. Verbindet man jeweils einen Leiter der verschiedenen Systeme miteinander,so erh�alt man ein verkettetes Mehrphasensystem.Das internationale Verteilsystem f�ur elektrische Energie ist ein verkettetes symmetri-sches Dreiphasensystem und wird auch Drehstromnetz genannt. Die drei Wechselstrom-systeme haben beim Endverbraucher jeweils eine E�ektivspannung von 400 V und sindzueinander um 2�=3 = 120� phasenverschoben.Man spricht von Dreieck- (allgemein Polygon-) und Sternschaltungen:U1
U U
U U U
1 2
33 2
400 V
230 V
N

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 18Die E�ektivspannungen in der Dreieckschaltung betragen 400 V, in der Sternschal-tung 400=p3 = 230V. Die Anschlusspunkte (Phasen) werden mit U1; U2; U3 (fr�uherR;S; T oder U; V;W ) bezeichnet. Der symmetrische Nullpunkt ist spannungslos undwird als Neutralleiter N (fr�uher Mp oder O) bezeichnet.Der Neutralleiter ist bei symmetrischer Last auch in der Sternschaltung stromlos.Bei unsymmetrischer Last im Alltag ist das jedoch im allgemeinen nicht der Fall, da manverschiedene 230 V Verbraucher hat. Dadurch entstehen Spannungsschwankungen aufdem Neutralleiter wegen dessen endlichen Leiterwiderstand und er eignet sich deshalbnicht sehr gut als Massepotential.Deshalb wird in der Regel noch eine sogenannte Schutzerdung installiert, bei derman sich bem�uht, sie stromlos zu halten, und die gut mit Erdung (Wasserleitungenetc.) verbunden ist. F�ur st�orungsfreie (\brummfreie") elektronische Installationen ist esoft angebracht, deren Bezugsmasse mit der Schutzerdung zu verbinden, aber keinesfallsmit dem Neutralleiter!Der Vorteil des Drehstroms besteht in der Verkettung: Dadurch kann mit nur dreiLeitern soviel Energie �ubertragen werden, wie bei drei unabh�angigen Systemen, wassechs Leiter erfordern w�urde. Durch die Wahl zwischen Stern- oder Dreieckschaltunghat der Verbraucher ausserdem zwei verschiedene Spannungen zur Verf�ugung. (Histo-risch gesehen war vor allem die einfache Bauweise von Drehstromasynchronmotoren vonausschlaggebender Bedeutung, heute k�onnen die daf�ur notwendigen Drehfelder elektro-nisch erzeugt werden). 19.10.981.3 Die Kirchho�'sche RegelnGustav Robert Kirchho� lebte von 1824 bis 1887 und war Professor in Heidelberg von1854 bis 1876. Die nach ihm benannten Regeln f�ur ein Netzwerk von Zweipolen lautenwie folgt:1. Knotenregel (Kirchho�'s current law, KCL): In einem Knoten ist die Summe allerStr�ome null.2. Maschenregel (Kirchho�'s voltage law, KVL): In einem geschlossenen Stromkreisist die Summe aller Spannungen null.Das physikalische Prinzip der Knotenregel ist die Ladungserhaltung, das der Ma-schenregel die Energieerhaltung (im konservativen Feld verschwindet die Potentialdif-ferenz entlang einer geschlossenen Kurve).

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 19Man braucht in der Praxis Konventionen: Bei einem Knoten gehen positive Str�omevom Knoten weg (ist nicht einheitlich in der Literatur). In der Masche nimmt manpositive Spannungsabf�alle entlang der positiven Stromrichtung, Gleichspannungsquellenwerden von + nach - positiv gerechnet.Beispiel: Berechne die Spannung UL an einem Verbraucher einer reellen Spannungs-quelle: Der Stromkreis besteht aus einer idealen Spannungsquelle U0, einem Innenwi-derstand Ri und einem Lastwiderstand RL.KVL: � U0 + IRi + IRL = 0 (1.30)Daraus erh�alt man I = U0=(Ri +RL) und somitUL = RLRi +RL � U0 (1.31)Man spricht von einem Spannungsteiler. Der Stromkreis heisst o�en, wenn kein Strom iesst und man spricht von Kurzschluss, wenn RL � Ri. Dann ist die UL fast null. Indiesen beiden F�allen verschwindet die Leistung im Lastwiderstand.Man spricht von Leistungsanpassung, wenn die Leistung im Lastwiderstand maximalwird. Das ist bei RL = Ri der Fall: P = U20=4RL. Bei Leistungsanpassung wird gleichvielLeistung am Innenwiderstand wie am Lastwiderstand verbraucht. Die Leistungsanpas-sung spielt ebenfalls bei der �Ubertragung schneller Signale auf langen Leitungen eineRolle (siehe 1.5).Beachte, dass in einem Netz von Zweipolen, die Anwendung nur einer der beidenRegeln gen�ugend Gleichungen liefert, um alle Spannungen und Str�ome zu berechnen.Die verschiedenen L�osungsverfahren f�ur die Berechnung eines linearen Netzwerkes wer-den entsprechend in Knotenpotentialanalyse und Maschenstromanalyse eingeteilt (siehe[Kori98], Seite 32).1.4 SPICE SimulationenDas Programm SPICE wurde urspr�unglich im Rahmen einer Dissertation an der Uni-versit�at in Berkley, Ca. entwickelt. In der Zwischenzeit ist es stark ausgebaut wordenund kommerziell erh�altlich, leider werden die Algorithmen aber nicht mehr o�engelegt.Das Grundprinzip besteht aus der L�osung eines linearen (!) Netzwerkes von m Zwei-polen mit Hilfe eines Knotenpotentialverfahrens. Dabei wird jedemKnoten ein PotentialUi zugeordnet. Die Str�ome in einem Zweipol mit Impedanz Zik und Leitwert Yik = 1=Zik

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 20zwischen den Knoten i und k werden durch (Ui�Uk) �Yik ausgedr�uckt. Allf�allige Span-nungsquellen werden durch ihre �aquivalente Stromquellen mit Leerlaufstrom Iq ersetzt(siehe 1.2.1). Die Anwendung der Knotenregel ergibt f�ur jeden der n Knoten des Netzeseine lineare Gleichung. Es entsteht ein System von n inhomogenen linearen Gleichungenf(Yik) � U = Iq (1.32)wobei f(Yik) eine Matrix ist, die die m Zweipole enth�alt, U = (U)i der Vektor derKnotenpotentiale und Iq der Vektor der Stromquellen, den die einzelnen Knoten sehen.Meistens gibt es eine L�osung (siehe lineare Algebra). SPICE berechnet nun dieseL�osung, wobei als Randbedingung ein Potential als Masse de�niert, und somit null seinmuss. Es braucht mindestens eine Stromquelle im System, sonst erh�alt man nur dieTriviall�osung U0 = 0. Ausserdem m�ussen solche Knoten, die nur kapazitiv mit demRest des Systems verbunden sind, mit einer Anfangsbedingung (z.B. mit sehr hohemWiderstand gegen Masse) versehen werden, sonst weigert sich SPICE weiterzurechnen.Diese Rechnung wird als \Bias Calculation" bezeichnet.Man kann nun auch eine zeitliche �Anderung eines Potentiales vorgeben (z.B. Sprung-funktion oder auch beliebige Funktionen der Zeit). SPICE kann dann f�ur das darauf-folgende Zeitintervall mit dieser neuen Randbedingung wieder eine L�osung berechnen.Das Verfahren l�asst sich fortsetzen und wird \Transientenanalyse" genannt.Weiter l�asst sich mit Hilfe einer Wechselspannungsquelle \VAC" eine Schaltung mitvariabler Frequenz speisen, und direkt Bodediagramme f�ur das �Ubertragungsmass unddie Phasenverschiebung erstellen (\AC Analyse").Man beachte, dass man von linearen Gleichungen ausgeht. Das erfordert also zuersteine Linearisierung von Kennlinien aller vorkommenden Bauelemente im Arbeitspunkt,wie in 1.2.1 besprochen.Das Programm existiert unter dem Namen pSpice f�ur Windows und ist leider nichtgerade billig. Eine Demoversion, die auch schon einiges kann, gibt es im Internet (sie-he: http://www.microsim.com/ bzw. http://www.orcad.com/). Es ist aber auch in denmeisten anderen elektronischen CAD Systemen eingearbeitet.Demonstrationen:1. Tiefpass erster Ordnung: Eingabe, Bias CalculationVAC, AC AnalyseTransientenanalyse mit Stepfunction,2. LRC Glied:AC Analyse: steilere Funktionfalsches R (=10*R) -> Serieresonanz.2. Kapazitiver SPannungsteiler f"ur Sparkdetection

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 211.5 Endliche Leitungen(Vollst�andiger Formalismus siehe z.B. [Putz71], Seite 325)Leitungen dienen der �Ubertragung elektrischer Signale und Energie. Leitungen end-licher L�ange mit angelegter Spannung und in denen ein Strom iesst, wechselwirkenelektromagnetisch mit sich selbst und der Umgebung. DieMaxwellgleichungen beschrei-ben dieses System vollst�andig. Die Eigenschaften von Leitungen k�onnen jedoch auchvollst�andig mit einer geeigneten Ersatzschaltung aus den besprochenen Grundzweipo-len R;L;C beschrieben werden:LL
R
G
R
G
dI
I(x) I(x+dx)
C CDie Abbildung zeigt eine solche, die in der Praxis die meisten F�alle beschreibt. MitL, R, C und G sind jeweils die Gr�ossen pro Leitungsl�ange gemeint. R ist der ohm'scheWiderstand der Signalleitung, C die Kapazit�at zwischen Signal- und Masseleitung, Ldie Selbstinduktivit�at der Leitung und G der Leitwert der Isolation (=1/Verlustwider-stand). Betrachte man das Leitungsst�uck dx indem der Strom I(x; t) iesst , so ergibtsich ein Spannungsabfall U(x; t) �uber L und R nach dem ohm'schen Gesetz:�@U@x = (R+ i!L) I (1.33)Mit der Knotenregel bekommen wir ausserdem:�@I@x = (G+ i!C) U (1.34)Di�erenzieren wir die erste Gleichung nach x und eliminieren wir den Term @I@x. Es bleibteine Di�erentialgleichung f�ur die Spannung U(x) �ubrig, die sogenannte Telegraphenglei-chung: @2U@x2 = (R+ i!L) (G + i!C) U (1.35)(analog f�ur den Strom). Als L�osung erhalten wir ged�ampfte Wellen entlang dem Leiter:U(x; t) = U0ei!t� x; mit = � + i� = q(R+ i!L)(G + i!C) (1.36)

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 22 heisst die komplexe D�amfungskonstante. Ihr Realteil � beschreibt die D�ampfung, derImagin�arteil � = 2�� die Wellenzahl. Die Phasengeschwindigkeit unserer Welle ist:v = !� (1.37)F�ur eine verlustfreie Leitung mit R = 0 und G = 0 wird �0 = !pLC und somitv = v0 := 1=pLC konstant.Man nennt das Verh�altnis von Spannung zu Strom in der Leitung analog demohm'schen Gesetz den Wellenwiderstand oder die Wellenimpedanz Z. Durch Einset-zen der L�osung f�ur U direkt in 1.33 erh�alt manZ = UI = sR+ i!LG+ i!C (1.38)also im allgemeinen eine komplexe Zahl. Eine verlustfreie Leitung hat die ImpedanzZ = Z0 := qL=C.Beispiele:Koaxkabel bestehen aus einer konzentrischen Anordnung von Innenleiter (Durch-messer d), Isolation und Aussenleiter (Innendurchmesser D). Die Induktivit�at und Ka-pazit�ate pro L�angeneinheit berechnen sich zuL = �2� � ln Dd ; C = 2��ln Dd (1.39)und betragen numerisch typisch zu 250 nH/m bzw. 100 pF/m. Die Fortp anzungsge-schwindigkeit wird v = 1pLC = 1p�� (1.40)und h�angt damit nur vom Isolationsmaterial und nicht von der Geometrie ab. TypischeWerte sind 60% der Lichtgeschwindigkeit, also 5ns/m. Ganz schnelle Kabel bekommtman mit � = 1, sogenannte Luftkabel, wo nur mit minimalem Material der Innenleiteran Ort gehalten wird. { Die Impedanz wird schliesslichZ = sLC = r�� � 12� � ln Dd (1.41)hier kommt es also auf das Isolationsmaterial und auf das Durchmesserverh�altnis an.Die meisten Koaxkabel haben Z = 50 , es ist aber auch 35, 75 und 95 gebr�auchlich.

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 23Twisted Pair Kabel zu deutsch verdrillte Leitungen genannt, bestehen aus zweisymmetrischen isolierten Litzen (Druchmesser d), die im Abstand a gehalten werdenund verdrillt werden. Dadurch wird das Einkoppeln von St�orsignalen (�Ubersprechen)stark reduziert. Induktivit�at und Kapazit�at pro L�angeneinheit werdenL = �� ln 2ad ; C = ��ln 2ad (1.42)Numerische Werte sind etwa 600 nH/m und 50 pF/m, die Impedanzen liegen etwabei 120 . Dabei ist zu beachten, dass durch die schlechter de�nierte Geometrie dieImpedanz ziemlich variieren kann.Koaxkabel haben zwar die bessseren Eigenschaften, sind aber teurer und brauchenmehr Platz. Twisted pair Kabel eignen sich vor allem f�ur die �Ubertragung digitalerSignale.Striplines bestehen aus Kupferbahnen (Breite b, Dicked), die auf einer gedrucktenSchaltung der Dicke D aufgebracht sind. Auf deren R�uckseite be�ndet sich eine durch-gehende Kupferlage, die die Masseschicht darstellt. Die Impedanz dieser Anordnungbetr�agt: Z = 75p� � ln 6D0:75b + d + 0:075bD [ , mm] (1.43)Typische Kupferkaschierungen haben eine Dicke von d = 35 �m, Leiterplatten meisteine solche von ca. 1.5 mm (oder 0.4 mm bei einem 4{lagen Print). Der einzig freieParameter um eine bestimmte Impedanz zu erreichen, bleibt deshalb die Breite b. F�urZ = 100 wird ben�otigt man eine Leiterbahnenbreite von ca. 0.6 mm f�ur 1.5 mm dickeLeiterplatten (0.15 mm f�ur 0.4 mm Dicke). Die Ausbreitungsgeschwindigkeit betr�agtauch hier ca. 5 ns/m. Sie wird aber um Faktoren gr�osser, wenn an den LeiterbahnenIC's angeschlossen werden: Deren Eingangskapazit�at verlangsamt die Signalausbreitung,da v = 1=pLC!D�ampfung:F�ur den Fall einer sogenannten Widerstandsd�ampfung (R > 0, aber G = 0) erhaltenwir aus Gleichung 1.36 (v0 = 1=pLC):� = !v0 vuut12 (1 +s1 + R2!2L2 ) (1.44)� = !RC2� (1.45)

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 24Damit wird f�ur ! � !0 = R=L die Wellenzahl � nicht mehr genau proportional zu !,sondern etwas gr�osser. Die Phasengeschwindigkeit !=� somit frequenzabh�angig kleiner,d.h. wir haben Dispersion, die Signale werden verzerrt �ubertragen. Ebenfalls ist dannZ frequenzabh�angig (siehe 1.38) und wird f�ur kleine Frequenzen gr�osser.F�ur kleine Frequenzen, bzw. grosse Drahtwiderst�ande (! � !0) wird � = q!RC=2und damit � = �. Das heisst die D�ampfung wird mit der Wurzel der Frequenz schlim-mer. F�ur grosse Frequenzen bzw. kleine Drahtwiderst�ande wird � = !=v0, Z = Z0 unddemnach � = R=2Z0. Die Dispersion verschwindet also f�ur hohe Frequenzen.Der Skine�ekt bewirkt aber, dass die Stromdichte an der Ober �ache eines metal-lischen K�orpers gegen innen exponentiell abnimmt (siehe zum Beispiel [Jack90]. Diemittlere Eindringtiefe des Stromes ist � = s 2�!� (1.46)(� Leitf�ahigkeit). TypischeWerte sind f�ur Kupfer bei 1 MHz 70�m, bei 1 GHz 2 �m. Des-halb nimmt der e�ektive Kabelwiderstand mit p! zu, und entsprechend hat man auchbei grossen Frequenzen noch einep! { Abh�angigkeit der D�ampfung. Um die Ober �achezu vergr�ossern, nimmtman f�ur HF { Anwendungen deshalb manchmalKupferfolien odermehrere Litzen. 26.10.98Zahlenbeispiel: Koaxkabel RG 178: Z = 50 , R = 0:45 /m, L = 240 nH/m,C = 95 pF/m. Bei 2 MHz und 100 m L�ange wird das Signal um einen Drittel reduziert.Bei 200 MHz �uberleben nur gerade noch 1% des Signals nach 100 m. Bessere Kabelm�ussen dicker sein. Die kritische Frequenz wird etwa !0 = 2 MHz. In diesem Bereichgibt es Dispersion, die kleineren Frequenzen kommen versp�atet an (Tiefpassverhalten).Die Dispersion wird o�ensichtlich signi�kant, wenn ! > !g = (Rl � Cl)�1, der Tief-passgrenzfrequenz. F�ur z.B. 20 MHz ist das bei einer Kabell�ange von ca. l = 30m derFall. Beachte, dass die Tiefpassgrenzfrequenz mit der Kabell�ange im Quadrat kleinerwird, die �Ubertragungsqualit�at eines Kabels wird demnach mit dem Quadrat der L�angeschlechter.Falls gerade R=L = G=C ist, spricht man von einer verzerrungsfreien Leitung,da dann die Dispersion gerade verschwindet (v =const) und die Impedanz und dieD�ampfung frequenzunabh�angig werden.Die Sache ist allerdings wie immer in der Praxis komplizierter, da es auch Ver-luste wegen frequenzabh�angiger Polarisation des Dielektrikums gibt. Bei ganz hohenFrequenzen schliesslich werden die Hohlleitermode wichtig, das ist aber erst in derGr�ossenordnugn 10 GHz der Fall. F�ur den praktischen Einsatz eines Kabels muss mandie Abschw�achung und Phasenverzerrung messen, bzw. die numerischen Herstelleran-gaben zu Rate ziehen.

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 25Abschluss:�Andert sich die Geometrie der Leitung an einer bestimmten Stelle, so �andern sichauch Ausbreitungsgeschwindigkeit und Impedanz. Mit dem gleichen Formalismus wief�ur ein Wellenpaket am endlichen Potentialtopf in der Quantenmechanik oder in derOptik kann man die re ektierte und die transmittierte Welle berechnen (siehe zumBeispiel [Hin96], Seite 21-24).Ein spezieller Fall ist das Ende einer Leitung. Es sei mit einem Widerstand R abge-schlossen. Ist R = Z, so ist der Widerstand \angepasst", die Energie der ankommendenWelle wird im Widerstand vernichtet. Mit dem erw�ahnten Formalismus erh�alt man denRe exionsfaktor f�ur die Amplitude der Welle:r = R � ZR + Z (1.47)O�ene Leitungen, also grosses R, f�uhren zu Re exionen von Signalen mit gleichem Vor-zeichen, kleine Widerst�ande (Kurzschl�usse) f�uhren zu Re exionen mit umgekehrtemVorzeichen. Anwendung: Messung von Leitungsl�angen und Lokalisierung von Impedan-zinhomogenit�aten.Insbesondere Jede Art von geometrischer Inhomogenit�at entlang der Leitung (Steck-verbindungen, L�otstellen usw.) f�uhrt zu Re exionen und Verlusten. Hochfrequenzleitun-gen m�ussen deshalb sehr sorgf�altig gebaut werden.Abschluss bei mehreren Quellen oder VerbraucherSollen an einer Leitung mehrere Verbraucher angeschlossen werden, oder sollen ver-schiedene Quellen die gleiche Leitung treiben (Bussystem), dann gelten folgende Regeln:� Die Leitung muss eindimensional sein, allf�allige Abzweigungen f�ur Anschl�ussem�ussen kurz gegen�uber der Wellenl�ange sein.� Beide Enden der Leitung m�ussen mit Z0 abgeschlossen sein.� Alle Verbraucher (ausser an den Enden der Leitung) m�ussen eine grosse Ein-gangsimpedanz haben Ri � Z0 und m�oglichst reell sein. Kapazitive Anschl�usseverlangsamen die Signalausbreitung.� Die D�ampfung der Leitung soll klein sein R � !L, anderenfalls sind Zwischen-verst�arker vorzusehen.

KAPITEL 1. STROM, SPANNUNG, WIDERSTAND 26Kurze Leitungen:All diese Betrachtungen der Wellenausbreitungen sind nur sinnvoll, wenn die Wel-lenl�ange klein ist gegen�uber der Leitungsl�ange. Kurze Leitungen, also wenn l � �,verhalten sich wie eine Kapazit�at, wenn der Ausgang unbelastet ist. Schliesst man diekurze Leitung am Ausgang kurz, sieht man am Eingang die Induktivit�at.Will man ein Signal aus einer Spannungsquelle mit endlicher Innenwiderstand Ri�uber eine solche relativ kurze Leitung �ubertragen, stellt das ganze also ein Tiefpass mit� = Ri � C � l dar.Sogenannte �=4 { Leitungen haben eine L�ange l = �=4 und verhalten sich etwa sowie eine gedackte Orgelpfeife. O�ene �=4 { Leitungen stellen einen Serieresonanzkreis(jZj = 0, aber ) f�ur diese Wellenl�ange dar. Schliesst man eine solche Leitung kurz, erh�altman einen Parallelresonanzkreis.Demo langes Koax-Kabel:1. Signalverz"ogerung mit kurzem Puls2. durchstimmbarer Abschlusswiderstand: pos und neg Reflexionen3. Bananenstecker Verbindung nix gut.4. Kabel gut abschliessen: ANstiegsflanke zeigt trotzdem Dispersion.5. Kabel Kurzschluss.6. L"ange messen mit offenem Kabel7. l"angerer Puls mit Reflexionen: Treppenstufen8. Kleine Frequenz mit R_i=10kOhm: Tiefpass9. Lambda Viertel Leitung mit Resonanz.1.6 Physik des Rauschens Einschub21.10.98

Kapitel 2Halbleiter { Bauelemente2.1 Halbleiter und ihre DotierungIn einem isolierten Atom sind die diskreten Energieeigenzust�ande der H�ullenelektronenbei sehr niedriger Temperatur von unten her aufgef�ullt. Mit Fermienergie �F bezeichnetman die Grenze ab welcher die Energieniveaus leer sind. Erh�oht man die Temperatur Twerden einzelne Elektronen mit einer gewissen Wahrscheinlichkeit auf h�oheren Niveaussich aufhalten.E
T klein
T gross
f(E)
εF
Die Fermifunktion beschreibt dann die Belegungsdich-te f(E) der Zust�ande mit Energie E in Funktion derTemperatur T : f(E) = 11 + eE��FkT (2.1)Man merke sich, dass kT � 1=40 eV bei Zimmertempe-ratur.Bringen wir nun viele Atome in einer regelm�assigen Anordnung (Gitter) unter, dannkombinieren die diskreten Energieniveaus der einzelnen Atome in gemeinsame Ener-gieb�ander. Noch immer wird die Belegungsdichte von der Fermifunktion beschrieben.Von besonderem Interesse sind die beiden B�ander unmittelbar in der N�ahe der Fer-mienergie: Das Valenzband be�ndet sich unmittelbar unterhalb der Fermienergie, dasLeitungsband unmittelbar dar�uber. Der Abstand zwischen Valenz- und Leitungsbandheisst band gap energy EG.Bei T = 0 be�nden sich alle Elektronen im Valenzband (bzw. in noch tieferenNiveaus). Bei erh�ohter Temperatur werden einzelne Elektronen in das Leitungsband27

KAPITEL 2. HALBLEITER { BAUELEMENTE 28angehoben. Diese ne Leitungselektronen und die dadurch entstehenden np L�ocher imValenzband sind die Tr�ager der Leitf�ahigkeit des Materials.Bei reinen Halbleitern spricht man von intrinsischer Leitung: Es gibt gleich vieleLeitungselektronen wie L�ocher: np = ne =: ni. Aus der Fermifunktion l�asst sich leichtableiten, dass ni � e� EG2kT (2.2). Die folgende Tabelle zeigt einige Beispiele, wobei f�ur die Halbleiter auch die intrin-sische Leitungsdichte bei 300 K angegeben ist. Diese ist absolut sehr klein im Vergleichzu der Zahl der Atome, die f�ur ein reines Siliziumgitter zum Beispiel etwa 5 � 1022 cm�3betr�agt. EG [eV] ni [cm�3]Isolatoren SiO2 8Diamant 5Halbleiter GaAs 1.42 2 � 106Si 1.12 1 � 1010Ge 0.66 2 � 1013Metalle ' 0 28.10.98Der �uberwiegende Teil aller Halbleiterelektronik wird heute aus Silizium hergestellt.Der wesentliche Trick besteht nun in der Dotierung (englisch Doping). Dabei werdenminimal kleine Mengen von 3 oder 5 wertigen Atomen als Verunreinigung in das Gitterder 4 wertigen Silizium Atome eingebracht.Wird ein 5-wertiges Atom an einer Gitterstelle eingebracht, die eigentlich f�ur ein 4-wertiges Atom gedacht ist, gibt es einen zus�atzlichen Elektronenzustand, der allerdingssehr schwach gebunden ist. Sein Energieniveau liegt nahe am Leitungsband. Man sprichtvon einem Donator, wof�ur typischerweise Phosphor oder Arsen verwendet wird.Ebenso ergibt sich bei einer 3-wertigen Verunreinigung einen zu�atzlichen Lochzu-stand, dessen Energieniveau nahe am Valenzband liegt und das leicht ein Elektron ausdem Valenzband binden kann. Typische Akzeptoren sind Bor, Aluminium oder Gallium.Die Bindungsenergien f�ur die zus�atzlichen durch die Dotierung mit Bor oder Phos-phor entstehenden Elektronen- oder Lochzust�ande betragen nur 0.045 eV, sind also inder Gr�ossenordnung von kT bei Raumtemperatur. Deshalb be�nden sich im normalenBetrieb die meisten der zus�atzlichen Elektronen im Leitungsband (ebenso die L�ocherim Valenzband). Die Dotierungsst�arke bestimmt die Leitf�ahigkeit.

KAPITEL 2. HALBLEITER { BAUELEMENTE 29Man beachte aber, dass der Leiter bei der Dotierung nat�urlich insgesamt neutralbleibt. Die durch die Ionenimplementierung zus�atzliche positive Ladung wird durcheinen entsprechenden Zustrom an Elektronen ausgeglichen.Valenzband
Leitungsband Fermienergie
Das Bild links zeigt die Lage der Fermienergie f�ur undotierte Halbleiter. Bei n-Dotierung ergeben sich zus�atzliche Elektronenzust�ande wie in der mittleren Skizze ge-zeigt. Die Fermienergie verschiebt sich deshalb nach oben. Analog dazu im rechten Bilddie Situation f�ur Lochzust�ande. Bei 300 K sind die Elektronen und L�ocher wie skiz-ziert fast alle im Leitungs- bzw. Valenzband. n-Dotierung f�uhrt also zu zus�atzlicherElektronleitung, p-Dotierung zu zus�atzlicher Lochleitung.Einen Zusammenhang zwischen der Verschiebung der Fermienergie und der Dichteder Leitungselektronen erh�alt man aus der Fermiverteilung und einigen Annahmen �uberdie e�ektive Lage und Dichte der Dotierungszust�ande f�ur Halbleiter im Gleichgewicht(f�ur eine Herleitung siehe zum Beispiel [Pier96], Seite 49-53):ne = ni � e(�F��i)=kT (2.3)np = ni � e(�i��F )=kT (2.4)Dabei sind ni und �i die Leitungsdichte und die Fermienergie im intrinsichen Halbleiter,�F die durch die Dotierung verschobene Fermienergie. Die Gleichungen gelten nur, fallsder Abstand zwischen �F und dem Leitungs- bzw. Valenzband � 3kT � 75mV ist,andernfalls nennt man den Halbleiter degeneriert.Daraus folgt unmittelbar auch das sogenannte np Produkt:ne � np = n2i (2.5)Dotiert man also einen Halbleiter mit Donatoren, die zu einer Leitungselektronendichtene f�uhren, kann die Lochdichte mit der obigen Formel abgesch�atzt werden. Die Tem-peraturabh�angigkeit von ni ist durch 2.2 gegeben. Falls die Dotierung gross gegen�uberder intrinsichen Leitf�ahigkeit ist (typische praktische Werte in Silizium sind 1015cm�3),

KAPITEL 2. HALBLEITER { BAUELEMENTE 30werden schon bei relativ kleinen Temperaturen alle zugeh�origen Elektronen sich imLeitungsband be�nden, die Leitungsdichte wird gleich der Dotierungsdichte.Majoritaetsleitung
T[K]
Leitungsdichte/Dotierungsdichte
Intrinsische Leitung
Die Majorit�atsleitung (die durch die Dotierung hervorgerufene Leitung) ist ab einergewissen Temperatur also konstant, wenn alle dotierten Ladungstr�ager sich im Leitungs-band be�nden: ne = ND.Die Leitung der nicht dotierten Ladungstr�ager heisst Minorit�atsleitung. Aus Glei-chung 2.5 folgt f�ur die Minorit�atsleitungsdichte f�ur einen n-dotierten Halbleiter np =n2i =nD, sie h�angt mit Gleichung 2.2 also stark von der Temperatur ab. Bei grossenTemperaturen dominiert dann die intrinsische Leitung, das Halbleiterbauelement wirdin der Regel unbrauchbar. (Die Figur ist f�ur eine Phosphor - Dotierung in Silizium mit1015cm�3 berechnet, siehe [Pier96], Seite 66).2.2 Die pn GrenzschichtDurch Ionenimplementationstechniken ist es heute m�oglich auch sehr kleine Struktu-ren von verschieden dotierten Bereichen in Silizium herzustellen. Der im englischen pnjunction genannte �Ubergangsbereich zwischen p- und n-dotierten Halbleiterbereichenstellt das zentrale Element der Halbleitertechnik dar.Denken wir uns, dass zwei vorher gegeinander isolierte p und n-Bereiche in perfektemKontakt gebracht werden. Da es auf der p-Seite viel mehr L�ocher gibt als auf der n-Seite,

KAPITEL 2. HALBLEITER { BAUELEMENTE 31werden diese durch Di�usion in den n-Bereich wandern. Ebenso di�undieren Elektronenin den p-Bereich. Das hat zur Folge, dass im Grenzbereich eine Ladung entsteht, diedurch die dotierten Gitterstellen gebildet wird, denen jetzt die Ladungstr�ager fehlen.Diese Ladung hat nun ein elektrisches Feld und somit ein Potential zur Folge, dasDi�usionspotential, das der Di�usion entgegenwirkt. Es bildet sich also ein Gleichge-wicht zwischen Di�usion und Potential. Die Energieb�ander arrangieren sich so, dass dieFermienergie gerade eine Konstante ist:Fermienergie
n-Seite p-Seite
+-Ladung
Potential
E-FeldDer Grenzbereich hat eine wesentlich reduzierte Leitungsdichte, man spricht von derVerarmungszone (depletion region) oder von der hochohmigen Sperrschicht.Das Di�usionspotential kann aus der erw�ahnten Gleichgewichtsbedingung berechnetwerden ([Pier96], Seite 203), unter Verwendung der sogenannten Einstein { Beziehung,die die Di�usionskonstante, die Ladungstr�agerbeweglichkeit und die Temperatur mit-einander verkn�upft. Man erh�alt: Ud = kTe ln(NANDn2i ) (2.6)Dabei sind NA und ND die Akzeptor- und Donatordichten auf der p- und n- Seite des�Uberganges. F�ur eine typische Siliziumsperrschicht mit 1015 cm�3 Dotierung auf beidenSeiten erh�alt man eine Di�usionsspannung von 0.6 V. Ud ist o�ensichtlich temperatu-rabh�angig mit einem Koe�zienten von etwa 2mV/K.

KAPITEL 2. HALBLEITER { BAUELEMENTE 32p - Substrat
n-DotierungBei der Herstellung verwendet man zum Bei-spiel ein p dotiertes Silizium - Substrat (ty-pischerweise Scheiben mit 6" = 150 mmDurchmesser). Durch Ionenimplementationvon Phosphor wird ein stark n-dotierter Be-reich gescha�en. An der Grenze bildet sichdie depletion regionDie ideale pn Kennlinie(siehe Skizze in [Pier96], Seite 236)Wird nun an diesen Halbleiter�ubergang eine externe Spannung angelegt, dann ver-schieben sich die Potentiale der Energieniveaus und die Fermienergie der beiden Seitengegeneinander:Legt man eine negative Spannung (reverse bias, Minus an der p-Seite) an, so wirdder Potentialwall vergr�ossert. Es k�onnen nur die Minorit�atstr�ager einen Strom bewirken.Kommt zum Beispiel ein Elektron aus der p-Seite durch Di�usion zuf�allig zu nahe anden Potentialwall, wird es durch das in der Sperrschicht herrschende elektrostatischeFeld auf die n-Seite gezogen, es iesst ein kleiner Strom Ir. Die Ursache dieses Stromist also Leitungstr�ager { Di�usion ausserhalb der Sperrschicht, er h�angt deshalb nichtvon der angelegten Spannung ab. Wegen ne = n2i =NA ist dieser sogenannte Sperrstromjedoch stark temperaturabh�angig Ir � e�EG=kT (vgl. Gleichung 2.2).Legt man eine positive Spannung (forward bias, Plus an der p-Seite) an, so wirdder Potentialwall abgebaut. Da gem�ass der Fermifunktion die Leitungsladungsdich-te im Valenz- und Leitungsband exponentiell mit dem Abstand von der Fermiener-gie abnimmt, wird die Wahrscheinlichkeit, dass ein Ladungstr�ager den Potentialwall�uberwindet, exponentiell von der angelegten Spanung abh�angen.Mit diesen qualitativen �Uberlegungen k�onnen wir die ideale Kennlinie der pn Grenz-schicht wie folgt ansetzen: I = Ir � (e eUkT � 1) (2.7)Diese Gleichung wird auch ideale Diodengleichung genannt, der damit beschriebeneStrom nennt man entsprechend seinem Ursprung den Di�usionsstrom. Diese einseitigeLeitung der Grenzschicht ist die Grundlage der Funktion aller junction Halbleiterele-mente.

KAPITEL 2. HALBLEITER { BAUELEMENTE 33Sperrschichtdicke(siehe [Pier96], Seite 210-214)Da die Majorit�atstr�ager durch die Polung der anliegenden Sperrspannung von derSperrschicht zur�uckgezogen werden, vergr�ossert sich die Breite der Sperrschicht mitwachsender Spannung.Vorerst erhalten wir aus der Bedingung, dass in der Sperrschicht die Gesamtladungverschwinden muss (Gauss'scher Satz), eine Beziehung f�ur die relative Ausdehnung derSperrschicht in den p- und n- Bereich xp und xn, wenn man als Randbedingung dieDonator- und Akzeptor-Dotierungsdichten ND und NA verwendet:eNAxp = eNDxn somit NAND = xnxp (2.8)Die Sperrschicht dehnt sich also umso mehr in einen Bereich aus, je kleiner dessenDotierung im Vergleich zur anderen Seite ist.Aus der eindimensionalen Poissongleichung@E@x = � ���0 (2.9)und der Randbedingung, dass R Edx �uber die gesamte Sperrschicht die Spannung U�Udergeben muss, erhalten wir ferner:U � Ud = �eND2��0 x2n � eNA2��0 x2p (2.10)Diese zwei Gleichungen mit zwei Unbekannten sind l�osbar, f�ur die gesamte Sperrschicht-dicke erhalten wir dannd = xp + xn = s2��0e ( 1NA + 1ND ) � (Ud � U) (2.11)Die Dicke h�angt also von der Wurzel der angelegten Spannung an und die kleinereDotierungskonzentration bestimmt haupts�achlich die Gesamtdicke.Die Kapazit�at der Sperrschicht h�angt von deren Fl�ache und der Dicke d ab. F�urschnelle Schaltkreise ist eine kleine Kapazit�at erforderlich, weil man dann beim Schal-ten weniger Ladung ab iessen lassen muss. Daf�ur braucht man kleine Ausdehnungenund grosse Dicken, man muss also kleine Dotierungsdichten w�ahlen. Da d � pU kann

KAPITEL 2. HALBLEITER { BAUELEMENTE 34man die Kapazit�at mit der Sperrspannung steuern, was in den Kapazit�atsdioden seineAnwendung �ndet. Anwendung: VCO (Voltage controlled oscillator).Ebenfalls eine dicke Sperrschicht und somit kleine Dotierungsdichten braucht manf�ur hohe Spannungsfestigkeit im Sperrbetrieb.Im Gegensatz dazu bewirkt eine hohe Dotierungsdichte zwar eine kleine Sperr-schichtdicke, wegen Gleichung 2.5 aber eine kleinere Minorit�atsladungsdichte, und somiteinen kleineren Sperrstrom. 2.11.982.3 Dioden und ihre AnwendungenAnode
Kathode
leitend
Das einfachste Halbleiterelement mit einem einzigen pn�Ubergang heisst Diode. Halbleiterdioden werden f�ur einen weitenAnwendungbereich hergestellt. Die p-Seite heisst auch Anode,die n-Seite Kathode, letztere ist meist mit einem Ring gekenn-zeichnet, also die Seite von der kein Strom iessen kann.Man spricht auch von Gleichrichterdioden, ihre charakteristischen elektrischen Ei-genschaften sind� maximale Sperrspannung� Sperrstrom bei Raumtemperatur� Kapazit�at und Schaltgeschwindigkeit� maximaler Vorw�artsstromund nat�urlich ihre geometrische Gr�osse und die Anschlusstechnik.2.3.1 Reale KennlinieSchaut man sich die Kennlinie einer realen Diode genauer an, stellt man sofort fest, dasses erhebliche Abweichungen gibt zum Di�usionsstrom, der durch die ideale Diodenglei-chung 2.7 beschrieben wird.

KAPITEL 2. HALBLEITER { BAUELEMENTE 35Der Sperrstrom ist h�oher als von der Dotierung erwartet und h�angt doch etwas vonder Spannung ab. Das liegt an der thermischen Erzeugung von Elektron-Lochpaaren imSperrbereich. Der E�ekt wird umso gr�osser, je dicker die Sperrschicht (mehr Volumen)und ist somit proportional zu pU .Bei kleinen Spannungen im Vorw�artsbereich gibt es den umgekehrten E�ekt. Nebendem idealen Diodenstrom gibt es auch solche Ladungen, die zwar den Potentialwall nochnicht �uberschreiten k�onnen, aber innerhalb der Sperrschicht zuf�allig auf ein Loch mitdem gleichen Problem tre�en. Die so entstehende Rekombinationswahrscheinlichkeitf�uhrt zu einem e�ektiv erh�ohten Strom, der E�ekt ist propotional zu eeU=2kT .Die beiden erw�ahnten Prozesse werden unter demBegri� Recombination{Generation{Current zusammengefasst, man spricht vom IR�G. (ausf�uhrliche Diskussion in [Pier96],Seite 270)U
0.6V
I
UZ
Bei sehr grossen Vorw�artsstr�omen beginnt sich das Halb-leitermaterial wie ein ohm'scher Widerstand zu verhalten,der Anstieg der Kennlinie wird dadurch zunehmend linearstatt exponentiell.Bei grossen Sperrspannungen schliesslich bricht die Sperr-schicht zusammen, die Diode wird schnell leitend, manspricht vom Zenerbereich (siehe Abschnitt 2.3.4). Zusam-menfassend resultiert die Diodenkennline im nebenstehen-den Bild.2.3.2 Dioden als GleichrichterDie Leistungsversorgung aller unserer Ger�ate erfolgt �uber das Wechselspannungsnetz.Elektronikanwendungen ben�otigen aber Gleichspannung, weshalb Gleichrichter in dieNetzteile eingebaut werden m�ussen. Man unterscheidet zwischen Vollwellen- und Halb-wellengleichrichter.BeimHalbwellengleichrichterwird nur eine der Halbwellen der Wechselspannung ver-wendet. Ein Kondensator wird auf die Spitzenspannung der Wechselspannung abz�uglichder Durchlassspannung der Diode aufgeladen, und sorgt daf�ur, dass auch in der Pauseweiter Strom iesst.LURLC
U
t

KAPITEL 2. HALBLEITER { BAUELEMENTE 36Beim Vollwellengleichrichter in der Br�ucken- oder Gr�atzschaltung (unten) werdenbeide Halbwellen ben�utzt, was die Pausen zwischen den Spannungsspitzen k�urzer machtund demnach nur einen halb so grossen Kondensator ben�otigt. Allerdings gehen nunzweimal die Diodendurchlassspannung verloren. Beim symmetrischen Vollwellengleich-richter werden zwei symmetrische Spannungen erzeugt, indem man bei gleicher Di-odenbeschaltung dem Transformator noch eine Mittenanzapfung als Masse verpasst,und dann von beiden Gleichspannungsanschl�ussen je einen Kondensator gegen Masseschaltet.RL U LC2.3.3 p.i.n. DiodenZur Erzeugung hoher Sperrspannungen baut man pin Dioden, die aus einer Schichtfolgep.i.n. bestehen, das heisst aus einer p-dotierten, einer nicht dotierten, intrinsischen undeiner n-dotierten Schicht bestehen. Die beiden dotierten Schichten sind sehr stark do-tiert, sodass sich grosse Str�ome erreichen lassen, aber trotzdem hohe Sperrspannungen,wegen dem grossen Abstand durch den i Anteil. Man erreicht Str�ome bis 1 kA undeinige kV Sperrspannung.PIN Dioden werden auch als Detektoren f�ur geladene Teilchen in der Kern- undTeilchenphysik eingesetzt: In den Sperrrichtung betriebenen Dioden erzeugt die Ionisa-tionsladung einen zus�atzlichen Strom, der detektiert werden kann.2.3.4 ZenerdiodenBei sehr grossen Sperrspannungen bricht die Diode zusammen, der Strom nimmtpl�otzlichsehr grosse Werte an. Daf�ur sind zwei unterschiedliche Prozesse relevant. Der sogenannteZenerstrom kommt durch den quantenmechanischen Tunnele�ekt zustande, die Zener-spannung h�angt damit von der Sperrschichtdicke ab. Der E�ekt ist nur bei sehr hoherDotierung relevant und kann mit verschiedenen Dotierungsst�arken von etwa 2 bis 8 Vvariiert werden. Typische Dotierungen sind 1017cm�3, was eine Sperrschichtdicke von

KAPITEL 2. HALBLEITER { BAUELEMENTE 37etwa 0.01 �m ergibt. Man beobachtet experimentell, dass die Zenerspannung mit zu-nehmender Temperatur abnimmt.Bei gr�osseren Sperrspannungen von schw�acher dotierten Dioden wird der Lawinen-durchbruch relevant. Wenn das elektrische Feld in der Sperrschicht sehr stark wird,erfahren die Elektronen, die den Dunkelstrom erzeugen, eine hohe Beschleunigung.Wird deren Energie bis zum n�achsten Stoss mit dem Gitter hoch genug, k�onnen sieneue Elektron-Lochpaare erzeugen, welche wiederum stark beschleunigt werden. DieserLawinene�ekt f�uhrt beim �Uberschreiten einer gewissen kritischen Spannung zu einempl�otzlich stark ansteigenden Strom. Man beobachtet einen Zunahme der Durchbruch-spannung mit der Temperatur.Man spricht { eigentlich unkorrekt { bei allen Dioden, die speziell f�ur den Betrieban der Durchbruchspannung vorgesehen sind, von Zenerdioden.Etwa in der Gegend von 6 V sind die E�ekte von Zener- und Lawinendurchbruchgleich gross. Wegen den unterschiedlichenVorzeichen der Temperaturkoe�zienten, erh�altman in diesem Bereich sehr temperaturstabile Spannungsreferenzen, von typischerweise@UZ@T 1UZ � 10�4=K.Eine solche Spannungsstabilisierung besteht aus einemVorwiderstand der die Schwan-kungen dU0 der unstabilen Spannung U0 im Verh�altnis zum di�erentiellen WiderstandrD der Zenerdiode reduziert. Der di�erentielle Widerstand ist de�niert als die Steigungder Kennlinie im Arbeitspunkt der Zenerdiode, die wir im Ersatzschaltbild als eineSerieschaltung von einer idealen Spannungsquelle und einem Widerstand rD au�assen:U U
R
R LL0 U U
R
R LL0
-+UZ
DrDas Bild zeigt also links die Stabilisierungsschaltung mit einer Last und rechts daszugeh�orige Ersatzschaltbild f�ur die Kleinsignalanalyse. Mit dem Knotenpotentialverfah-ren erhalten wir die GleichungU0 � ULR = UL � UZrD + ULRL (2.12)Daraus berechnet man UL in Funktion von U0. Eine kleiner �Anderung von U0 bewirkteine solche von UL, man erh�alt schliesslich f�ur eine Dimensionierung von R=rD � U0=UZdULUL = rD U0R UZ � dU0U0 (2.13)

KAPITEL 2. HALBLEITER { BAUELEMENTE 38Das Ergebnis ist scheinbar unabh�angig von RL was sehr angenehm ist. Nat�urlich darfaber der Strom durch RL nur so gross werden, dass der Arbeitspunkt der Zenerdi-ode an der gew�unschten Stelle bleibt. Dieser Sachverhalt geht in der Herleitung wegender Linearisierung der Kennlinie unter! Ausserdem erzeugt der volle Strom im Wi-derstand R eine Verlustleistung von R � I2, die bei grossen Spannungsunterschiedenoder grossen Str�omen den Einsatz dieser Schaltung verbietet. Man spricht von analo-gen Netzteilen, oder l�angsgeregelten Netzteilen. Die Stabilisierung wird in der Regel mitVerst�arkerschaltungen verbessert, der Widerstand wird dabei durch einen Transistor alsregelbaren Widerstand ersetzt.Es sind komplete Schaltungen als IC's erh�altlich mit der Identi�kationsnummer 78xxf�ur positive und 79xx f�ur negative Spannungen, wobei xx den Wert der geregelten Aus-gangsspannung bedeutet. Diese Bausteine haben 3 Anschl�usse (Eingang, Ausgang, Mas-se), der Eingang muss mindestens 2 Volt �uber dem Ausgang liegen. Sie sind thermischund elektrisch �uberlastgesch�utzt.Solche l�angsgeregelte Netzteile werden heute praktisch nur noch f�ur kleine Str�ome(< 1A) eingesetzt, da sonst der K�uhlaufwand zu gross wird.Zenerdioden eignen sich auch f�ur die Verschiebung eines Signales um einen fe-sten Spannungswert (Levelshifting), sowie f�ur die Ausgangsspannungsbegrenzung vonVerst�arkern, wof�ur man Zenerdioden in den Gegenkopplungszweig schaltet. (Siehe Ka-pitel 3.6).Weitere Diodenschaltungen:- Levelshifter Schaltung- Eingangsueberspannungsschutz- Cockcraft-Walton oder Booster Schaltung zur HV Erzeugung.(fuer HV fuer TV Roehren, PM's usw.) 4.11.98- Abw"artswandler, Durchflusswandler, Kories Seite 489(statt analoge L"angsgeregelte Stromversorgungen)- Aufwaertswandler, Sperrwandler, Kories, Seite 491.(fuer Batteriegeraete, Fotoblitze, usw.)2.4 Bipolare TransistorenDas Halbleiterelement Transistor besteht aus 3 Elektroden, es dient zum Verst�arkenoder Schalten eines Signales. Speziell versteht man unter bipolaren Transistoren solche,

KAPITEL 2. HALBLEITER { BAUELEMENTE 39die aus 3 unterschiedlich dotierten Halbleiterzonen bestehen, wobei man entsprechendder Dotierungsfolge zwischen npn und pnp Transistoren unterscheidet:Basis sehr schwach
Kollektor
Emitter
n
p
n
B
C
E
Dotierung:
B
E
Cschwach
starkDie beiden pn �Uberg�ange verhalten sich einerseits wie zwei entgegengesetzte Dioden,diese Beschreibung (ganz rechts) gibt aber noch nicht die gesamte Funktionalit�at wieder.Normalerweise wird die Basis{Emitterdiode in Vorw�artsrichtung und die Kollektor{Basisdiode in Sperrrichtung betrieben. Dadurch driften Elektronen vom stark dotiertenEmitter in die Basisschicht. Da diese sehr schwach dotiert, und ausserdem sehr d�unnist, reicht die Sperrschicht der BC Diode nahe an die CE �Ubergangschicht heran, sodassviele Elektronen in die BC Sperrschicht driften k�onnen. Dort werden sie durch das E-Feld Richtung Kollektor abgesaugt und erzeugen so einen CE Strom. Der zentrale Punktist nun, dass dieser Strom durch die Spannung an der BE Diode gesteuert werden kann;diese ist gegeben durch den Basisstrom und die Diodenkennlinie des BE pn �Uberganges.Der bipolare Transistor beschreibt man deshalb am zweckm�assigsten als Strom-verst�arker. Das Verh�altnis � = @IC@IB (2.14)heisst die Stromverst�arkung des Transistors. Typische Werte liegen zwischen 10 (Lei-stungsstransistoren) und 1000 (Kleinsignaltransistoren), je nach Typ. � schwankt starkvon Indivivduum zu Individuum und nimmt mit gr�osserer Kollektor{Basis Sperrspan-nung UCE zu, da dann die Sperrschicht dicker wird, und somit n�aher an den BE�Ubergang herankommt (Early{E�ekt).

KAPITEL 2. HALBLEITER { BAUELEMENTE 40I
U
I
C
B
CE
Die sich daraus ergebende Ausgangskennlinie zeigt dasnebenstehende Bild. Im normalen Betrieb rechts der ge-strichelten Linie ist UCB > 0, die Kollector{Basis Diodealso gesperrt. Der Kollektorstrom wird vom Basisstromgesteuert und h�angt nur leicht von der CE Spannungab, der di�erentielle Ausgangswiderstand ist also klein.Links von der gestrichelten Linie beginnt die CB Diodezu leiten, der Kollektorstrom wird nun unabh�angig vomBasistrom, es �ndet keine Steuerung mehr statt. Manspricht vom S�attigungsbetrieb.Der di�erentielle Eingangswiderstand rBE ist durch die Diodengleichung der Basis{Emitter Strecke gegeben, Di�erenzieren von Gleichung 2.7 ergibtrBE = @UBE@IB = kTeIB (2.15)Der di�erentielle Aausgangswiderstand wird (experimentell)rCE = @UCE@IC = U IC (2.16)und ist also umgekehrt proportional zum Kollektorstrom. Die Konstante U beschreibtden Early{E�ekt und heisst demnach Earlyspannung.Die De�nition der Steilheit S (forward transconductance) beschreibt die Steuereigen-schaft des Transistors auf eine andere Art, n�amlich die �Anderung des Kollektorstromesgegen�uber der BE Spannung. Man erh�alt:S = @IC@UBE � @IC@IB � @IB@UBE = �rBE = eICkT (2.17)Weiter spricht man von der R�uckwirkung (backward transconductance) von der CESpannung auf den Basisstrom. Dieser E�ekt ist aber meist klein ausser bei hohen Fre-quenzen, wo dieMillerkapazit�at (e�ektive Kapazit�at zwischen Kollektor und Basis, alsoetwa die BC Grenzschichtkapazit�at) die Verst�arkung reduziert.Das Grosssignal- (links) und das Kleinsignalersatzschalbild (rechts) illustrieren dieseEigenschaften:

KAPITEL 2. HALBLEITER { BAUELEMENTE 41β I B
β I B
I
E
C
B BCI =
BEU r
I C
rBE UCE
CE
BMillerBipolare Transistoren zeichnen sich durch eine hohe Steilheit, eine realtiv gute Pa-rameterstabilit�at sowie hohe Geschwindigkeit aus. Nachteilig wirkt sich der relativ hoheSchaltungsaufwand zur Einstellung und Stabilisierung des Arbeitspunktes aus.Anwendung: Ansteuerung eines Relais odereinen anderen Stromverbraucher von einemLogiksignal aus. Die Schaltung erlaubt ei-ne separate Speisespannung f�ur das Re-lais. Die Diode sch�utzt den Transistor vor�Uberspannungen, die durch die Induktivit�atentstehen w�urden.Wichtige Grenzdaten sind die maximale zul�assige Verlustleistung, und die maxima-len Sperrspannungen der CE und CB Dioden, wobei erstere oft nur wenige Volt betr�agt.Dotierungsst�arke und geometrische Gr�osse des Transistors erlauben die Grenzdaten unddie dynmaischen Parameter in einem grossen Bereich zu variieren. F�ur eine ausf�uhrlicheBehandlung der verschiedenen K�uhlmethoden und ihre Berechnung siehe zum Beispielin [N�uhr98].2.5 Felde�ekt { TransistorenHier handelt es sich um Halbleiter, die im Gegensatz zu bipolaren Transistoren miteinem elektrischen Feld, d.h. leistungslos gesteuert werden, ohne dass in der Steuerelek-trode ein nennenswerter Strom iesst. Man nennt sie FET.Die Steuerung des Stromes im Kanal zwischen Drain und Source erfolgt durch eineSteuerelektrode, das Gate.

KAPITEL 2. HALBLEITER { BAUELEMENTE 42source drain
gatesource drain
gate
bulkbulk
n nnn
pp
LDas Bild links zeigt einen gesperrten n-Kanal FET, der auf einem p dotierten Sub-strat (bulk) aufgebaut ist. Wird nun an die isolierte Steuerelektrode (\gate") eine posi-tivere Spannung angelegt, werden sich unterhalb des gates Elektronen ansammeln, dievorerst die L�ocher des p-Substrates kompensieren, es bildet sich eine Verarmungszone.Wird die Spannung weiter erh�oht bildet sich ab der \Threshold voltage" oder \pinch o�voltage" VT ein �Uberschuss an Elektronen, man erh�alt unter dem Gate eine zus�atzlichen-Schicht, auch n-Kanal genannt, die Source und Drain leitend verbindet (Bild rechts).Neben der Dotierungsst�arke ist vor allem die geometrische Gr�osse der gate Elektrode(L�ange L, Breite in der nicht gezeichneten Dimension W ) ein de�nierender Faktor f�urdie FET Eigenschaften.Bei kleinen Drain{Source Str�omen l�asst sich so der Kanalwiderstand steuern. Beigr�osseren Str�omen ergibt sich durch den Spannungsabfall zwischen source und drainein ortsabh�angiges elektrisches Feld, das gegen Drain hin immer kleiner wird, der Ka-nal wird deshalb immer d�unner. Damit wird der Strom begrenzt, es ergibt sich einS�attigungse�ekt. Die DS Spannung, bei der die S�attigung beginnt, heisst Kniespan-nung (UK). O�ensichtlich ist UK = UGS � UT .Die Schwellwertspannung VT h�angt neben der Dotierungsst�arke auch von der Span-nung VBS zwischen bulk und source ab, da diese Spannung die Dicke der Sperrschichtzwischen dem Kanal und dem Bulk und somit die Kanaldicke mitbestimmt.Man unterschiedet SperrschichtFET (junction FET, JFET) und MOSFET, (\MetalOxide on Semiconductor Field E�ect Transistor", auch MOST). W�ahrend bei Sperr-schicht FETs eine normale pn Sperrschicht die Isolation zwischen Gate und Kanal dar-stellt, hat eine MOSFET eine d�unne SiO2 Schicht als Isolator, was einen viel h�oherenIsolationswiderstand ergibt. MOSFET gibt es selbstleitend (Depletion) und selbstsper-rend (Enhancement), je nach dem ob bei Gatespannug null der Kanal leitet oder nicht: 9.11.98

KAPITEL 2. HALBLEITER { BAUELEMENTE 43n-Kanal
p-Kanal
JFET(selbstsperrend) (selbstleitend)
BG
S
BG
D
BG
D
BG
S
D
S S
D
S
D
S
D
G
G
MOS enhancement MOS depletionMOSFET sind fast immer selbstsperrend. Selbstleitende MOSFETs erzeugt mandurch explizite Dotierung der Kanalzone. Sperrschicht FETs sind immer selbstleitend.Es gibt bei allen drei Sorten p und n Kanal FETs, n-Kanal MOSFETs werden oft k�urzereinfach als NMOS bezeichnet (entsprechend PMOS).Da man in konkreten Schaltungen sowohl NMOS als auch PMOS Transistoren ver-wenden will, werden oft beide Transistoren auf denselben wafer aufgebracht. Hat maneinen p-Substrat und will ein PMOS Transistor machen, implantiert man zuerst ei-ne n dotierte Wanne, die den bulk des PMOS ausmachen wird. NMOS Transistorenk�onnen direkt das Substrat als bulk nehmen. Diese Technik wird als \complementary"MOS Technik bezeichnet (CMOS). Der gr�osste Teil aller heute hergestellten Elektronikbesteht aus CMOS Technik.I
UDS
D
UGS
Die nebenstehende Figur zeigt eine typische Ausgangs-kennlinie. Links der Kniespannung (gestrichelten Linie)bestimmt die Gatespannung den Widerstand, rechts da-von be�ndet sich der S�attigungsbereich, wo der Stromfast konstant wird, und der FET also als gesteuerteStromquelle arbeitet. Bei gegebenen Materialkonstanten(Herstellungsprozess) und Dotierung k�onnen die Kenn-linien durch L�ange L und BreiteW des FET beein usstwerden.Im ohmschen Bereich gilt ungef�ahrID = k � WL � ((VGS � VT )VDS � 12V 2DS) (2.18)(k Materialkonstante). Der Ausgangswiderstand rDS wird also ungef�ahrrDS := @VDS@ID � 1k LW 1VGS � VT (2.19)

KAPITEL 2. HALBLEITER { BAUELEMENTE 44Das Verh�altnis L=W und die Gatespanung bestimmen also den Widerstand. Beachte,dass die Kapazit�at zwischen Gate und Kanal durch W � L bestimmt ist.Die S�attigung beginnt sich ab der Kniespannung VDS = VK := VGS �VT bemerkbarzu machen. Da ist die Kanalbreite am Drainende gerade auf null gesunken (VGD :=VGS �VDS = VT ). Die gestrichelte Linie in der Kennlinie ist also durch diese Bedingungde�niert. Im S�attigungsbereich gilt:ID = k2WL (VGS � VT )2 (1 + �VDS) (2.20)wo � eine experimentell zu bestimmende kleine Korrekturkonstante ist, die direkt denAusgangswiderstand bestimmt: rDS := @VDS@ID � 1�ID (2.21)Analog zu der Situation bei den bipolaren Transistoren de�niert man die Steilheit S(englischTransconductance gm) und erh�alt aus Gleichung 2.20 f�ur den S�attigungsbereich:S := gm := @ID@UGS = 2k2WL (VGS � VT ) = 2sk2WL ID (2.22)Die Transkonduktanz geht also mit der Wurzel des Drainstromes, im Gegensatz zumbipolaren Transistor, bei dem die Steilheit proportional zu IC war. Im ohm'schenBereichist gm proportional zu VDS wie man aus Gleichung 2.18 ersehen kann.UGS
UGS
Ur
G
S
DI
DS
mg .
DS
DGDC
CGS
Das nebenstehende Ersatzschaltbild zeigt diewichtigsten Komponenten eines FET.Eine vollst�andigere Beschreibung der Verh�altnisse und eine genaue Ableitung derFormeln �ndet man in [Laker94], Kapitel 1.Vergleich FET { bipolarDer wichtigste Unterschied ist, dass der FET eine sehr grossen, vernachl�assigbaren Ein-gangswiderstand hat.Auch wenn sich die Kennlinien auf den ersten Blick �ahnlich sehen, gibt es dochsigni�kante Unterschiede: Im S�attigungsbereich steigen die Kurven beim FET weni-ger (gr�osserer Ausgangswiderstand, also bessere Stromquelle). Daf�ur lassen sich mit

KAPITEL 2. HALBLEITER { BAUELEMENTE 45bipolaren Transistoren gr�ossere Verst�arkungen erreichen. Die Gegenkopplungskapazit�at(Millere�ekt) ist bei Transistoren allerdings in der Regel h�oher, sodass sich mit FETh�ohere maximale Frequenzen erreichen lassen.Im Bereich kleiner Ausgangsspannungen verh�alt sich der FET wie ein steuerbarerohm'scher Widerstand, wohingegen der bipolare Transistor in S�attigung geht, und nichtmehr linear steuerbar ist (nur noch ein{aus).Da wir es mit Bauelementen zu tun haben, die durch je eine Ein- und Ausgangs-spannung und -Strom charakterisiert sind, die alle miteinander zusammenh�angen, ist esnaheliegend, das Kleinsignalmodell (Linearisierung im Arbeitspunkt) in Matrixschreib-weise darzustellen (man spricht auch von Vierplogleichungen). Die sogenannte Y { Ma-trix (Leitwertmatrix) der bipolaren Transistoren lautet: dIBdIC ! = 1rBE 0S 1rCE ! � dUBEdUCE ! (2.23)Alternativ wird die sogenannte h Darstellung (Hybriddarstellung) verwendet: dUBEdIC ! = rBE 0� 1rCE ! � dIBdUCE ! (2.24)(Beachte, dass � = S � rBE)F�ur die FET wird rGS !1, deshalb machen nur die folgenden beiden Darstellungeneinen Sinn: dID = gm � dUGS + 1rDS � dUDS (2.25)und dUDS = rDS � dID � � � dUGS (2.26)wobei � = gm � rDS die Spannungsverst�arkung bei konstantem Drainstrom bedeutet.Heute werden bipolare Transistoren nur noch in einzelnen Spezialanwendungen, un-ter anderem f�ur Stromverst�arkungen bei Schaltanwendungen und in Leistungsverst�arkerneingesetzt. Der �uberwiegende Teil der aktiven analogen und digitalen Schaltungen wirdgesamthaft auf ein einziges Substrat in sogenannten integrierten Schaltkreisen in CMOSTechnologie hergestellt.2.6 Transistoren { GrundschaltungenEs gibt entsprechend den 3 Anschl�ussen drei Grundschaltungen, wobei der Name jeweilsder gemeinsame Referenzpol f�ur Ein- und Ausgangsspannung kennzeichnet: Emitter-

KAPITEL 2. HALBLEITER { BAUELEMENTE 46schaltung (Sourceschaltung), Kollektorschaltung (Drainschaltung), Basisschaltung (Ga-teschaltung).Bei allen Schaltungsarten m�ussen wir darauf achten, einen geeigneten Arbeitspunktzu stabilisieren, was einen zus�atzlichen Schaltungsaufwand bedeutet. Entsprechend ihrerBedeutung werden die folgenden Schaltungen jeweils haupts�achlich f�ur MOS Transisto-ren diskutiert.2.6.1 Emitter- oder SourceschaltungDie Emitterschaltung (bei FET Sourceschaltung) erlaubt die gr�osste Verst�arkung undentspricht direkt den im letzten Abschnitt diskutierten Funktionsprinzipien der Tran-sistoren.Da die Wahl eines g�unstigen Arbeitspunktes eine bestimmte Gleichspannung impli-ziert, muss das Signal sowohl am Eingang als auch am Ausgang mit Kondensatoreneingekoppelt werden (AC{Kopplung), was zusammen mit den Ein- bzw. Ausgangs-widerst�anden einen e�ektiven Hochpass bedeutet. Das Ersatzschema gilt f�ur hohe Fre-quenzen im Vergleich mit der unteren Grenzfrequenz der AC{Kopplung und gleichzeitigf�ur niedere Frequenzen im Vergleich zu den aus der Streukapazit�at CGD entstehendenoberen Grenzfrequenzen, es enth�alt deshalb keine Kondensatoren:R
R
RU
U oi
R2
1
D
S
R R
R
R UUDS
i
1 2
UG
g U
S
r
D o
Ub
m GDie beiden Widerst�ande R1 und R2 auf der Eingangsseite legen zusammen mit demdurch den Sourcewiderstand RS iessenden Drainstrom den Arbeitspunkt fest. Erwird f�ur Verst�arkungsanwendungen so gew�ahlt, dass der Transistor im oberen Bereichder Kennlinien (S�attigungsbereich) arbeitet. Es gilt o�ensichtlich f�ur den Arbeitspunkt:UGS = Ub R2R1 +R2 � ID �RS (2.27)UDS = Ub � ID (RS +RD) (2.28)

KAPITEL 2. HALBLEITER { BAUELEMENTE 47I I
U UGS DS
DD Diese Formeln k�onnen als ge-rade in die Kennlinienbildereingezeichnet werden (links�Ubertragungskennlinie, rechtsAusgangskennlinieBei FETs kann R1 und R2 sehr gross gew�ahlt werden, sodass ein hoher Eingangs-widerstand entsteht. Falls das Eingangssignal eine gen�ugende DC Stabilit�at hat, kanndie gesamte Eingangsbeschaltung weggelassen werden, was den h�ochsten Eingangswi-derstand erlaubt.Bei bipolaren Transistoren muss darauf geachtet werden, dass der Querstrom durchdiese Widerst�ande gross gegen�uber dem Basisgleichstrom wird. Man w�ahlt R1 und R2ungef�ahr 10 mal so gross wie der Emitterwiderstand, womit der Basistrom bei einerStromverst�arkung von 100 einen Zehntel des Querstromes ausmacht.Aus dem Kleinsignalersatzschaltbild k�onnen wir nun die Beziehungen f�ur den (di�e-rentiellen!) Eingangswiderstand ablesen. Das Kleinsignalbild f�ur den bipolaren Fallbraucht dabei zus�atzlich den Eingangswiderstand rBE vom Eingang zu RS . Es ergibtsich dann (links bipolar, rechts FET):ri = UiIi = R1kR2k(rBE + �RS) ri = R1kR2 (2.29)Der Ausgangswiderstand ro = dUo=dIo berechnet sich in der linearisierten Ersatz-schaltung am leichtesten als Verh�altnis von Leerlaufspannung durch Kurzschlussstrom,man erh�alt: ro = RCk(RE + rCE) ro = RDk(RS + rDS) (2.30)Die Spannungsverst�arkung A = dUo=dUi wirdA = � gmRD1 + gmRS (2.31)L�asst man den Sourcewiderstand weg (RS = 0, z.B. durch parallele Kapazit�at), dannwird die maximale Verst�arkung A0 = �gmRD erreicht. Es gilt:1A = 1A0 � RSRD (2.32)
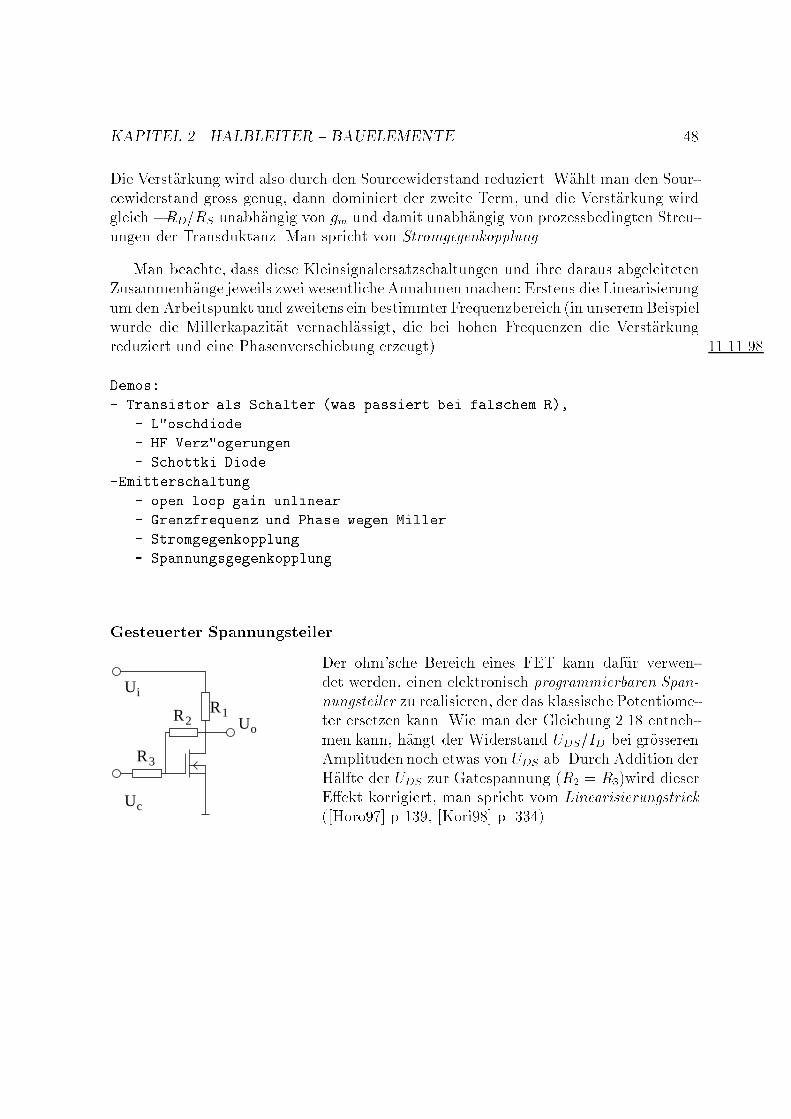
KAPITEL 2. HALBLEITER { BAUELEMENTE 48Die Verst�arkung wird also durch den Sourcewiderstand reduziert. W�ahlt man den Sour-cewiderstand gross genug, dann dominiert der zweite Term, und die Verst�arkung wirdgleich �RD=RS unabh�angig von gm und damit unabh�angig von prozessbedingten Streu-ungen der Transduktanz. Man spricht von Stromgegenkopplung.Man beachte, dass diese Kleinsignalersatzschaltungen und ihre daraus abgeleitetenZusammenh�ange jeweils zwei wesentliche Annahmenmachen: Erstens die Linearisierungum den Arbeitspunkt und zweitens ein bestimmterFrequenzbereich (in unseremBeispielwurde die Millerkapazit�at vernachl�assigt, die bei hohen Frequenzen die Verst�arkungreduziert und eine Phasenverschiebung erzeugt). 11.11.98Demos:- Transistor als Schalter (was passiert bei falschem R),- L"oschdiode- HF Verz"ogerungen- Schottki Diode-Emitterschaltung- open loop gain unlinear- Grenzfrequenz und Phase wegen Miller- Stromgegenkopplung- SpannungsgegenkopplungGesteuerter SpannungsteilerU
U
U
o
i
c
R
R R12
3
Der ohm'sche Bereich eines FET kann daf�ur verwen-det werden, einen elektronisch programmierbaren Span-nungsteiler zu realisieren, der das klassische Potentiome-ter ersetzen kann. Wie man der Gleichung 2.18 entneh-men kann, h�angt der Widerstand UDS=ID bei gr�osserenAmplituden noch etwas von UDS ab. Durch Addition derH�alfte der UDS zur Gatespannung (R2 = R3)wird dieserE�ekt korrigiert, man spricht vom Linearisierungstrick([Horo97] p 139, [Kori98] p. 334).

KAPITEL 2. HALBLEITER { BAUELEMENTE 49KonstantstromquelleStromquellen werden am einfachsten wie nebenstehendes Schalt-bild mit selbstleitenden FET's realisiert. Es wird keine Referenz-spannung ben�otigt. Es gilt einerseits UGS = �R � I, andererseitsliegt der Arbeitspunkt auf der �Ubertragungskennlinie ID(UGS). Da-durch ist der Strom festgelegt, allerdings gibt es entsprechend derExemplarstreuung eine relativ grosse Unsicherheit im Wert. Ausdem Ersatzschaltbild liest man folgenden Ausgangswiderstand ab([Kori98], Seite 331): r = rDS � (1 + gmR) +R (2.33)StromspiegelinI I out
T T1 2
Der rechte FET T1 sieht einen bestimmten Strom,dieser kann zum Beispiel mit dem eingezeichne-ten Widerstand eingestellt werden. Da die beidenUGS gleich sind, m�ussen f�ur zwei identische FET'sauch die Str�ome in den DS Kan�alen gleich sein.Das kann mit grosser Genauigkeit erreicht wer-den, wenn die beiden FET's unmittelbar neben-einder auf das gleiche Substrat angebracht werden.(gleiche Prozessparameter, gleiche Betriebstempe-ratur)W�ahlt man dieW=L der beiden FET's unterschiedlich, erh�alt man eine �Ubersetzungdes Stromverh�altnisses, es wird ([Laker94], page 378)IoutIin = (W=L)2(W=L)1 (2.34)Di�erenzverst�arkerT1 T2
i1 i2
out
b
U
U
U
U
RL
Die Stromquelle an den Source verteilt sichgleichm�assig auf die beiden FET's, wenndie Gatespannungen gleich sind. Andernfallsverteilt sie sich im Verh�altnis der Di�erenzder beiden Gatespannungen. An den Last-widerst�anden kann also eine Spannung ab-gegri�en werden, die proportional der Di�e-renz der Eingangsspannung ist ([Kori98], Sei-te 333). Die Di�erenzverst�arkung wird:Ad = UoUi1�Ui2 = �12 � gm �RL (2.35)

KAPITEL 2. HALBLEITER { BAUELEMENTE 50Weniger Freude hat der Designer an der sogenannten Gleichtaktverst�arkung ACM(\common mode ampli�cation"). Da die Stromquelle einen endlichen Innenwiderstandrq hat, wird bei gleichphasiger Bewegung der Ui und somit der gemeinsamen Source-spannung der Strom sich leicht �andern. Man erh�altACM = UoUi1 = �RL2rq (2.36)Das Verh�altnis von Di�erenzverst�arkung und Gleichtaktverst�arkung heisst Gleichtakt-unterdr�uckung oder common mode rejection ratio (CMRR).CMRR = gm � rq (2.37)Die Eingangsimpedanz f�ur langsame Signale ist nat�urlich beliebig hoch. F�ur schnelleSignale wirkt die Gate-Channel { Kapazit�at CGC als Last und bestimmt damit denEingangswiderstand und reduziert aber auch die Verst�arkung durch Gegenkopplung(Millerkapazit�at).Will man ein Signal im Vergleich zur Masse verst�arken, legt man zweckm�assigerweisedas Gate von T2 auf Masse. Diese Massnahme hat noch einen interessanten Nebenef-fekt: Verzichtet man n�amlich gleichzeitig auf den Lastwiderstand von T1 wird die obereGrenzfrequenz drastisch verbessert. Das liegt daran, dass der Drain von T1 nun festliegt,und es demnach keine gegenphasige Einkopplung auf das Gate mehr geben kann. Da dasGate von T2 auf Masse liegt, hat dessen HF{Gegenkopplung ebenfalls keine Wirkung!Es handelt sich eigentlich bei T1 um eine Drain{, bei T2 um eine Gateschaltung (sieheunten), die gesamte Schaltung wird vergleichbar mit einer sogenannten Cascode, sieheunten.T1 T2
bU
RL
i1 i2
out
U
U
U
Eine Verbesserung der Gesamtverst�arkung be-kommt man durch eine aktive Last in Form ei-nes Stromspiegels ([Laker94], p. 363). Dabei wirddie de�nierende Seite eines PMOS{Stromspiegelsals Last von T1, die Ausgangsseite als (Teil-)Lastvon T2 geschaltet. Eine negative �Anderung derEingangsspannung bewirkt nun gleichzeitig eineErh�ohung des Drainstromes von T2 und eine Er-niedrigung des Ausgangsstromes der Stromquelleauf der Seite von T2.W�ahlt man den Lastwiderstand, der nun die Summe der beiden Strom�anderungenaufnehmen muss, gross genug, kann man sehr hohe Verst�arkungen von 5000 und mehrerreichen.

KAPITEL 2. HALBLEITER { BAUELEMENTE 51Eine wichtige Anwendung des Di�erenzverst�akers ist der Komparator, bei dem zweiEingangsspannung verglichen werden, und ein Signal \0" oder \1" ausgegeben wird, janach dem welcher der beiden Eing�ange h�oher ist als der andere (Soll-Istwert-Vergleich,Schwellwerte f�ur Steuerungen und Alarmsysteme, usw.). Es handelt sich also um eine1 Bit Digitalisierung. Komparatoren sollen eine hohe Verst�arkung und eine schnelleAnstiegzeit haben.2.6.2 Basis- und GateschaltungenU
U
UR
R
D
b
S
o
i
Diese Schaltung hat eine Stromverst�arkung von etwa 1 undeinen niedrigen Eingangswiderstand, scheint also auf den er-sten Blick nicht sehr n�utzlich. Die Hauptanwendung bestehtjedoch in der Entkopplung von Ein- und Ausgang und so-mit demUnsch�adlichmachen derMillerkapazit�at. Jeglicher HFStrom durch dies iesst nach Masse ab, und kann somit keineGegenkopplung bewirken.Die Analyse des Kleinsignalersatzschaltbildes liefertri = 1gmkRS A = UoUi = gm �RD (2.38)Es besteht also trotz kleinem Eingangswiderstand eine Spannungsverst�arkung, die mansich in der HF{Technik zu Nutze macht ([Kori98], p 329).KaskodenschaltungenDie folgenden Skizzen zeigen die klassische Anwendung der Basisschaltung, die Kaskode.Links eine bipolare Kaskode, in der Mitte eine solche aus FET. 16.11.98LR
Ui
-
Uo
Ui
Uo
LR
-U
T
T
b
1
2
+Ub
Ui
-
LRUo
++

KAPITEL 2. HALBLEITER { BAUELEMENTE 52Das Signal wird vorerst mit einem Transistor T1 in Emitterschaltung verst�arkt. Da derKollektor den kleinen Eingangswiderstand des T2 in Basisschaltung sieht, �andert sichdie Spannung am Kollektor praktisch nicht, die Gegenkopplung durch die Millerkapa-zit�at ist deshalb vernachl�assigbar. Der von T1 verst�arkte Strom wird schliesslich mitHilfe von T2 in eine Spannung am Lastwiderstand RL umgewandelt. Die Gesamtspan-nungsverst�arkung betr�agt: A = �gm �RL (2.39)Die rechte Skizze zeigt die gefaltete Kaskode. Durch die Stromquelle wird die �Anderungdes Drainstromes von T1 nun auf T2 umgelegt. (Bei letzterem handelt es sich in der gefal-teten Kaskode um einen Transistor der umgekehrten Kanalpolarit�at als T1.) Der Vorteilliegt vorallem darin, dass der HF{Signalstrom nicht zwischen den Betriebsspannungen iessen muss.Neben der Verst�arkung auch sehr hohen Frequenzen �ndet die Kaskode noch �uberalldort Anwendung, wo eine schlecht de�nierte R�uckkopplungskapazit�at unerw�unscht ist(z.B. bei Integratoren).(siehe auch [Horo97] page 103, [Laker94] page 344)2.6.3 Kollektor- und Drainschaltungen+
R
RR
1
2E
Die Kollektorschaltung wird auch Emitterfolger (Sourcefolger) ge-nannt, da der Emitter jeweils etwa 0.6 V tiefer als die Basis liegt,und demnach derem Signal mit einem um 0.6 V tieferen Wert folgt.Die Spannungsverst�arkung ist hier zwar 1, jedoch gibt es einengrossen Eingangs- und kleinen Ausgangswiderstand, so dass derEmitterfolger als Impendanzwandler eingesetzt wird. Eine typischeAnwendung ist ein 50 Kabeltreiber.Der Ausgangswiderstand eines Emitterfolgers (links) bzw. Sourcefolgers (rechts wirdaus der Kleinsignalanalyse bestimmt:ra � rBE� ra = RS1 + gmRS (2.40)([Kori98], p. 303 und 328).Der Ausgangswiderstand eines Emitterfolgers ist also i.A. kleiner als der Wider-stand RE. Will man bei einem Kabeltreiber f�ur einen richtigen Abschluss sorgen, muss

KAPITEL 2. HALBLEITER { BAUELEMENTE 53man einen entsprechenden Abschlusswiderstand in Serie zwischen Kabel und Emitterschalten. In Praxis ist die Wahl des Widerstandes allerdings nicht so einfach, da ra vongm (bzw. RBE und �) abh�angt. Man nimmt deshalb besser Operationsverst�arker alsKabeltreiber, falls es auf korrekten Abschluss ankommt.3
1
2
+
o
1
2 SC
R
R RU
RC
Ui
Die Widerst�ande R1 und R2 legen den Ar-beitspunkt fest. Bei FET's sind sie nat�urlichunerw�unscht, da sie den Eingangswiderstandverkleinern. Die sogenannte Bootstrapschal-tung verscha�t Abhilfe, indem das Wechsel-spannungssignal mit Hilfe von C2 von derSource auf den Spannungsteiler eingekoppeltwird. Der Signalstrom imWiderstandR3 ver-schwindet wegen der Spannugsverst�arkungvon 1, der Eingangswiderstand der skizzier-ten Schaltung betr�agt etwa 100 M .Sourcefollower hat unvorhersehbarer O�set (VGS vs ID ist ziemlich prozess variabel):Zero Voltage follower , [Horo97], p. 135Leistungsverst�arker[Hin96], Seite 75/78. Emitterfolger im A{Betrieb, Pushpull im B{Betrieb. Saubere�Ubergabeschaltung Seite 78.Konstantspannungsquelle[Horo97] einfach S. 69, reguliert S. 105Darlingtonschaltung[Kori98] p. 290FET analog Schalter[Horo97] p 143typisch 25 bis 100 , beein usst Schaltgeschwindigkeit.

KAPITEL 2. HALBLEITER { BAUELEMENTE 54Achtung, Analogsignal nicht zu nahe an Steuerspannung kommen.Schaltspitzen wegen kapazitiver Kopplung der Steuerspannung auf die Analogsigna-le. Anwendungen: schaltbare Verst�arkungsfaktoren; sample and hold; DAC. 18.11.98

Kapitel 3Signale und Systeme3.1 SignaleUnter Signale versteht man skalare Funktionen der Zeit f(t), die als Strom oder Span-nung, aber auch als Licht im Wellenleiter oder als beliebige andere physikalische Gr�ossevorkommen k�onnen. Es gibt periodische und nichtperiodische Signale, deterministischeund zuf�allige Signale. Kausale Signale sind solche, die f�ur alle Zeiten t < 0 verschwinden.Unter Energie eine Signales wird in der Nachrichtentechnik das quadratische IntegralE = +1Z�1 jf(t)j2dt (3.1)verstanden, Signale mit nicht unendlicher Energie heissen Energiesignale.Unter Leistung eine Signales wird das auf die Zeit normierte quadratische IntegralP = limT!1 12T +TZ�T jf(t)j2dt (3.2)verstanden, Signale mit endlicher Leistung heissen Leistungssignale.Energiesignale haben P = 0, Leistungssignale E = 1. Energiesignale sind in derZeit \endlich lang" (z.B. e�t=� f�ur t � 0; t = 0 sonst), Leistungssignale sind \unendlichlang" (z.B. harmonische Funktion). Alle periodischen Signale sind Leistungssignale,haben also E =1. 55

KAPITEL 3. SIGNALE UND SYSTEME 56F�ur Untersuchungen von periodischen Signalen werden diese in Fourierreihen zer-legt, und die harmonischen Komponenten in der Elektronik oft einzeln betrachtet, manspricht von Frequenzraumanalyse. Da bei jeder Komponente Amplitude und Phase rele-vant sind, werden sie meist als komplexe Zahlen geschrieben, wie das im ersten Kapitelbehandelt wurde.Beispiele f�ur periodische Signale (n = Fourierreihenindex, ! = 2�=T = Kreisfrequenz):� positive Rechteckimpulse: Periode T , Pulsdauer � , Tastverh�altnis v := �=T . Fou-rierkomponenten: f(t) = v + 2�X sin (n�v)n cos (n!t) (3.3)F�ur v = 0:5 treten nur die ungeraden Komponenten auf.� symmetrische Trapezschwingung mit Periode T , Anstiegszeit = Abfallzeit = � ,a = ��=T . Fourierkomponenten:f(t) = 4a� Xn=1;3;5::: sin (na)n2 cos (n!t) (3.4)Man sieht also insbesondere, dass die �Ubertragung einer Trapezschwingung wenigerhohe Bandbreite braucht, als eine solche f�ur eine Rechteckschwingung.F�ur Anwendungen mit einzelnen, nichtperiodischen Signalen diskutiert man die Ant-wortsignale eines Systems im Zeitraum. Daf�ur verwendet man die Technik der Lapla-cetransformation.Beispiele f�ur einzelne Signale im Zeitraum:� Unter Impuls verstehtman ein endliches Signal das ausserhalb eines eingeschr�anktenZeitbereichs verschwindet. z.B. einelner Rechteckimpuls, Dreieckimpuls, Gaussim-puls. Der Impuls ist ein Energiesignal.� Die Stossfunktion oder der Stossimpuls (Dirac'sche Deltafunktion) ist de�niertdurch +1Z�1 f(t) �(t� t0) dt = f(t0) (3.5)Sie hat eine endliche Fl�ache von 1, es handelt sich also um ein Energiesignal.� Die Sprungfunktion s(t) (bis zu t = 0 ist s(t) = 0, f�ur t � 0 ist s(t) = 1). s(t) istein Leistungssignal, E =1.Die \Ableitung" der Sprungfunktion liefert den Dirac{Impuls.

KAPITEL 3. SIGNALE UND SYSTEME 573.2 SystemeU UTi o
Ein System ist eine Abbildung T , die ein Si-gnal (das Eingangssignal Ui) in ein anderes(das Ausgangssignal Uo, die Systemantwort)verwandelt: U0 = T (Ui) (3.6)Kausale Systeme sind solche, die keine Systemantwort geben, bevor das Signal nichtbeginnt. Anders ausgedr�uckt: kausale Systeme wandeln kausale Signale wieder in solcheum.3.3 LTI SystemeLineare Systeme sind solche f�ur die giltT (u1 + �u2) = T (u1) + �T (u2) (3.7)also die gleiche De�nition wie in der Linearen Algebra. In der Systemtheorie bezeichnetman dies auch als Superpositionsprinzip oder �Uberlagerungssatz, es l�asst sich gra�schdarstellen:+
+
+
+=T
T
T
u
u
T(u + u )
u
u
T(u ) + T(u )
22
1 1
21 21Zeitinvariante Systeme reagieren auf das Eingangssignal unabh�angig vom Zeitpunktseines Eintre�ens. Es giltfalls y(t) = T (x(t)) dann y(t� t0) = T (x(t� t0)) (3.8)Lineare und zeitinvariante Systeme heissen LTI Systeme (linear and timeinvariant).Realisierbare LTI Systeme sind zudem immer kausal.Systeme, die aus Widerst�anden, Induktivit�aten, Kapazit�aten und linearisierten ge-steuerten Quellen (z.B. Transistoren im Kleinsignalersatzschaltbild) bestehen, sind LTISysteme, vorausgesetzt, die �Ubertragungsfunktion bleibt endlich (\es schwingt nicht").

KAPITEL 3. SIGNALE UND SYSTEME 583.3.1 Betrachtungen im ZeitraumDie Sprungantwort h(t) ist das Ausgangssignal eines Systems, das mit der Sprung-funktion angeregt worden ist. Beispiel: Die Sprungantwort eines Tiefpasses ist h(t) =1� e�t=RC.Die Impulsantwort oder Stossantwort g(t) ist das Ausgangssignal eines Systems, dasmit einem Diracstoss angeregt worden ist. Es gilt also g(t) = T (�(t)), g(t) wird auchGewichtsfunktion genannt. Beispiel: Die Impulsantwort des RC Tiefpasses ist e�t=RCf�ur t > 0.In linearen Systemen bleibt Ableitung und Integral erhalten. Die Ableitung derSprungantwort ist also die Impulsantwort.Die Antwort auf ein beliebiges Eingangssignal x(t) ergibt sich durch folgende an-schauliche �Uberlegung ([Hin96], Seite 2): Man zerlege das Signal in viele sich folgendegewichtet einzelne Impulse x(t) = R x(� )�(� � t)d� . Die x(� ) sind also die Gewichte(Amplituden) der Deltafunktion, die zur Zeit � aktiv ist. Wegen der Linearit�at vertau-schen das Integral und die Abbildung T des Systems, es gilt:T �Z x(� )�(� � t)d�� = Z x(� )T (�(� � t))d� (3.9)Wegen der Zeitinvarianz giltg(� � t) = T (�(� � t)) , g(t) = T (�(t)) (3.10)Wir k�onnen also behaupten, dass ein LTI{System T mit der Impulsantwort g(t) auf einbeliebiges Eingangssignal x(t) mit einem Ausgangssignal y(t) reagiert, das durch daszweiseitige Faltungsintegral gegeben ist.y(t) = +1Z�1 x(� ) � g(t� � ) d� =: x(t) ? g(t) (3.11)womit auch der Faltungsoperator ? de�niert ist. Die Faltung ist eine lineare Operation,es gelten das Kommutativ-, das Assoziativ und das Distributivgesetz (Faltung undAddition vertauschen). Siehe [Kori98], Seite 240 �.Die Fouriertransformierte der Stossantwort ist gerade die �Ubertragungsfunktion G(!):Berechnet man n�amlich die Antwort eines Systems auf die harmonische Anregungx(t) = ei!t erh�alt man:y(t) = +1Z�1 ei!�g(t� � ) d� = +1Z�1 ei!(t��)g(� ) d� = e�i!t +1Z�1 e�i!�g(� ) d� = x(t) �G(!)(3.12)

KAPITEL 3. SIGNALE UND SYSTEME 59Wir hatten im ersten Kapitel gesehen, wie man mit Hilfe des komplexen ohm'schenGesetzes die �Ubertragunsfunktion berechnen kann. Hier sehen wir also, dass entwederdie Stossantwort, die Sprungantwort oder die �Ubertragungsfunktion ausreicht, um dasSystem vollst�andig zu beschreiben.3.3.2 Betrachtungen im FrequenzraumLTI Systeme reagieren auf harmonische Eingangssignale mit harmonischen Eingangs-signalen gleicher Frequenz. Es reicht also die Eingangssignale in ihre Fourierreihe zuzerlegen, und die Systemantwort der einzelnen Frequenzkomponenten zu untersuchen.Etwas formaler: Die Faltung zweier Funktionen geht durch die Fouiertransformationin eine Multiplikation �uber ([Bron98], Seite 727):y(t) = g(t) ? x(t) , Y (!) = G(!) �X(!) (3.13)wobei Grossbuchstaben die Fouriertransformierten bezeichnen.Man kann also die Reak-tion eines Systems im Frequenzraum dadurch berechnen, indemman das Eingangssignalfouriertransformiert, dann mit der �Ubertragungsfunktion multipliziert. Das Ausgangs-signal erh�alt man dann durch die inverse Fouriertransformation.Setzt man als speziellen Fall x(t) = �(t), berechnet sich das Faltungsintegral geradezu g(t), die Stossantwort. Die Fouriertransformation der Deltafunktion ist eine Kon-stante, es bleibt also in der Tat die �Ubertragunsfunktion als Fouriertransformation derStossantwort.3.4 Analyse im Zeitraum: Laplace { Transformatio-nenMuss man das Verhalten eines Systems im Zeitraum verstehen und optimieren, danneignet sich dazu Laplacetransformationen:Das Faltungsintegral, das ein System beschreibt, kann n�amlich nur dann mit Hilfeder Fouriertransformation in eine Multiplikation �ubergef�uhrt werden, wenn die Funk-tionen gewisse Bedingungen erf�ullen. So m�ussen zum Beispiel sowohl die Funktionen alsauch ihr Betrag integrierbar sein ([Bron98], Seite 722). Da dies gerade bei interessantenSignalen im Zeitbereich oft nicht erf�ullt ist (zum Beispiel Sprungfunktion!), verwendet

KAPITEL 3. SIGNALE UND SYSTEME 60man meist eine andere Integraltransformation, n�amlich die Lapalacetransformation. Sieist de�niert als einseitige Integraltransformation ([Bron98], Seite 708):L(f(t)) := 1Z0 e�st f(t) dt = F (s) s = � + i! (3.14)s ist die komplexe Frequenzvariable, sie geht f�ur � ! 0 in die normale Frequenz i!�uber. Dieser gegen�uber der Fouriertransformation (zweiseitige Integraltransformation)F(f(t)) := +1Z�1 e�i!t f(t) dt = F (!) (3.15)eingef�uhrte D�ampfungsterm � erweitert die Klasse der transformierbaren Funktionenerheblich. So ist zum Beispiel die Laplacetransformierte der Sprungfunktion gerade 1=s.Genauso wie f�ur die Fouriertransformation gilt auch f�ur die Laplacetransformation,dass sich eine Faltung im Originalbereich in eine Multiplikation im Bildbereich verwan-delt. Man kann also wie oben f�ur die Fouriertransformation beschrieben, die Antworteines Systems auf ein Eingangssignal x(t) leicht dadurch berechnen, dass man x(t)laplacetransformiert, dann mit der �Ubertragungsfunktion G(s) (! ist durch s ersetztworden) multipliziert und schliesslich in den Originalbereich zur�ucktransformiert.F�ur diese Operationen stehen Laplacekorrespondenztabellen zur Verf�ugung, siehezum Beispiel [Bron98], Seite 1063 �. Insbesondere ist die Transformierte der Sprung-funktion 1=s, die der � Funktion gerade 1. e��t transformiert sich in 1=(s + �). DieTransformierte der Ableitung y0(t) wird sF (s)� y(0). 23.11.983.4.1 Pole in der �UbertragungsfunktionDas Verhalten eines Systems l�asst sich auch als Di�erentialgleichung in den Ein- undAusgangssignalen x(t) und y(t) schreiben, in der Formanx(n)(t) + an�1x(n�1)(t) + : : :+ a0x(t) = bny(n)(t) + bn�1y(n�1)(t) + : : :+ b0y(t) (3.16)Die Laplacetransformation von gew�ohnlichen Di�erentialgleichungen n-ter Ordnungf�uhrt auf Potenzreihen ([Bron98], Seite 719). Die �Ubertragungsfunktion l�asst sich des-halb als Quotient zweier Potenzreichen schreiben:G(s) = Y (s)X(s) = ansn + an�1sn�1 + : : :+ a1s+ a0bmsm + bm�1sm�1 + : : :+ b1s+ b0 = k (s� �n)(s� �n�1) : : : (s� �0)(s� �n)(s� �n�1) : : : (s� �0)(3.17)

KAPITEL 3. SIGNALE UND SYSTEME 61Die n Nullstellen �i und vorallem die m Pole �i haben eine konkrete Bedeutung f�ur dieBeurteilung der Stabilit�at eines Systems, sowie dessen Einschwingvorg�angen. Nach demD�ampfungssatz der Laplacetransformation ist n�amlich L(f(t)) = F (s), L(es0tf(t)) =F (s� s0) (Verschiebung nach links, [Bron98], Seite 709), also gilt:1. Jeder Pol der �Ubertragunsfunktion an der Stelle s = s0 f�uhrt zu einemEinschwing-vorgang (Stossantwort) der Form es0t.2. Ein System ist genau dann stabil (schwingt nicht, divergiert nicht), wenn alle Polein der linken H�alfte (� < 0) der s{Ebene liegen.3. Zu jedem nicht reellen Pol s0 = a+ ib existiert auch der konjugiert komplexe Pols?0 = a� ib. (weil die bi reell sind)Liegt ein Pol auf der negativen reellen Achse, ergibt sich also ein exponentieller Abfall(kritische D�ampfung). Liegt er an der Stelle �a� ib erh�alt man eine Stossantwort derForm e�at sin bt.Um das Verhalten eines Systems im Zeitraum zu erforschen, reicht es also die Lageder Pole der �Ubertragungsfunktion G(s) zu diskutieren. Man erh�alt daraus direkt dieStossantwort, die wiederum das Systemverhalten vollst�andig beschreibt.Beispiel Tiefpass erster Ordnung (i! ! s, !0 = 1=RC):G(s) = 1=sCR+ 1=sC = !0!0 + s (3.18)Die �Ubertragungsfunktion hat also einen einzigen Pol bei �w0 auf der negativen s-Achse. Die Stossantwort lautet !0 e�!0t.R
C L
Beispiel RCL Bandpass�lter: Dieses be-steht aus einem Tiefpass zweiter Ordnung. Die�Ubertragunsfunktion berechnet sich als Spannungs-teiler mit komplexen Widerst�anden zuG(s) = s � L=R1 + s � L=R + s2LC (3.19)Wir de�nieren die Resonanzfequenz !0 = 1=pLC und den D�ampfungsfaktor � = !0 �L=2R, damit erhalten wir: G(s) = 2�!0sw20 + 2�!0s+ s2 (3.20)

KAPITEL 3. SIGNALE UND SYSTEME 62=1
Q
ω0
log G
log f
1
- 3dB ∆ω
2ζ
F�ur die Diskussion imFrequenz-raum setzen wir s = i! undbeobachten, dass f�ur ! = !0die �Ubertragunsfunktion gerade 1wird. Weit oberhalb und unter-halb f�allt jG(!)j mit 1=! ab esergibt sich eine Phasenverschie-bung von �90� . Um die Reso-nanzfrequenz herum ergibt sichein schmaler Peak, mit einer 3 dBBreite von �! := �!0Man de�niert auch die G�ute des Bandpasses (analog Schwingkreisg�ute):Q := !02�! = 12� (3.21)Die G�ute ist also eine grosse Zahl, wenn wir einen schmalbandigen Filter bauen. � istgerade die relative halbe -3 dB Breite von jG(!)j.F�ur die Diskussion im Zeitraum m�ussen wir die Pole in der �Ubertragungsfunktiondiskutieren, d.h. die L�osungen der Gleichungw20 + 2�!0s+ s2 = 0 (3.22)Diese quadratische Gleichung hat zwei Wurzelns1=2 = !0 (�� �q�2 � 1) (3.23)Ist � > 1 dann liegen beide Wurzeln auf der negativen reellen Achse, die Stossantwortenth�alt es1t + es2t. F�ur � < 1 liegen die beiden konjugiert komplexen L�osungen aufeinemKreis mit Radius !0. Die Stossantwort enth�alt dadurch also einen Einschwingtermes1t + es2t = 2 e��!0t cos (!0p1� �2 t). F�ur � = 1 wandern die beiden L�osungenzusammen zu s0 = ��!0, wir erhalten einen kritisch ged�ampften Einschwingvorgang.Mit Hilfe der Laplacetransformation k�onnen wir die Systemantwort y(t) der Sprun-funktion direkt und vollst�andig bestimmen, indemwir das Produkt der �UbertragungsfunktionG(s) mit der Laplacetransformierten der Sprungfunktion 1=smultiplizieren, und das Re-sultat zur�uck in den Zeitraum transformieren. Aus der Laplace{Korrespondenztabelle[Bron98], Seite 1063, Formel 7 entnehmen wir:F (s) = 1s2 + 2�s + �2 , f(t) = 1p�2 � �2 e��t sinq�2 � �2 t (3.24)

KAPITEL 3. SIGNALE UND SYSTEME 63Unsere entsprechende Werte eingesetzt, ergibt die Sprungantwort f�ur unseren Bandpassvon y(t) = 2�p1 � �2 e��w0t sinq1 � �2 !0t (3.25)Dieser Fall kommt vor allem in der Kern- und Teilchenphysik relativ h�au�g vor:Man will ein Ereignis messen, das in einem Sensor eine Ladungsmenge proportionalseiner Energie deponiert hat. Das entspricht einer Sprungfunktion, und wir wollen dieH�ohe des Sprunges vermessen. Ein derartiger Bandpass macht nun aus jedem Sprungein sch�oner Puls, der von der Vorgeschichte relativ unabh�angig ist. W�ahlt man � so,dass das Signal m�oglichst schnell wieder auf null ist, aber fast nicht mehr �uberschwingt,spricht man auch von einem Semigauss { Filter oder einem Shaper. Das ist etwa bei� = 0:8 der Fall.Solche Filter k�onnen mit Hilfe von Operationsverst�arkern f�ur praktisch beliebige�Ubertragungsfunktionen realisiert werden, nur unter Verwendung von Widerst�andenund Kapazit�aten. Man spricht dann von aktiven Filtern (siehe Kapitel 4.2.5).3.5 nichtlineare SystemeNichtlineare Systeme sind solche, deren Ausgangsgr�osse nicht linear von der Eingangs-gr�osse abh�angt. In der Praxis haben alle Systeme nicht lineare Komponenten, z.B. istdie Linearisierung im Arbeitspunkt von Halbleiterelementen nur eine N�aherung. Allepraktischen Systeme haben ausserdem Aussteuergrenzen, d.h. Ausgangssignale k�onnennur einen bestimmten Maximalwert erreichen, meist etwas weniger als die Spannungs-versorgungswerte.Nichtlineare �Ubertragungssysteme werden mit ihrer Kennlinengleichung beschrie-ben, h�au�g als Potenzreihe angen�ahert. In letzterem Fall nennt man die Ordnung desSystems die h�ochste vorkommende Potenz.In nichtlinearen Systemen n-ter Ordnung tauchen f�ur harmonische Eingangssignaleeiner Frequenz ! auch Ausgangssignale der Frequenzen n � ! auf. (Beispiel n = 2,x(t) = cos!t, y(t) enth�alt dann einen Term cos 2!t.)Um die Abweichung eine Systems von der Linearit�at zu beschreiben, bedient mansich des Klirrfaktors eine Systems k. Er de�niert durch das Verh�altnis der E�ektivwertealler Oberschwingungen und diejenigen des Gesamtsignales, wenn man als Eingangs-signal ein harmonisches Signal einer einzigen Frequenz verwendet (An Amplitude der

KAPITEL 3. SIGNALE UND SYSTEME 64n-ten Oberschwingung): k = s 1Pn=2A2ns 1Pn=1A2n (3.26)Nat�urlich geh�oren zur Angabe eines Klirrfaktors auch die Messbedingungen. Der Klirr-faktor ist bei konkreten Systemen frequenz- und amplitudenabh�angig. Typische Wertesind: 33% f�ur eine Verzerrung von einem Sinus- zu einem Rechtecksignal. Bei 10% istSprache gerade noch verst�andlich. Bei 1% sind sie in guter Musik gerade noch zu h�oren,w�ahrend ordentliche HIFI Verst�arker einen Klirrfaktor von < 0:1% haben.F�uttert man ein nichtlineares Systemmit mehreren hamonischen Frequenzen, so tre-ten am Ausgang zus�atzlich auch Summen und Di�erenzen von diesen Eingangsfrequen-zen auf. Bei zwei Eingangsfrequenzen !1 und !2 entstehen allgemein alle Frequenzender Form jp � !1 � q � !2j, mit p; q = 0; 1; 2 : : : n und p + q � n. Mit Hilfe von schmal-bandigen Verst�arkern kann man versuchen diese Intermodulationsprodukte loszukriegen,allerdings gibt es immer solche, die besonders nahe an den Nutzfrequenzen liegen.Bei Systemen mit nur geringen Abweichungen von der Linearit�at wachsen die In-termdulationsfrequenzen k-ter Ordnung (k = p + q) mit uk, wenn u die Amplitudedes Eingangssignales ist! Der Intermodulationsabstand IMk ist das Verh�altnis des In-termodulationsproduktes k-ter Ordnung zum Nutzsignal, das meist logarithmisch indB angegeben wird. Er wird also mit zunehmender Aussteuerung des Signales kleiner(Skizze).3.6 R�uckkopplungF�ur das Verst�andnis der im n�achsten Kapitel zu besprechenden Operationsverst�arker-schaltungen und auch f�ur die Regeltechnik von zentraler Bedeutung sind r�uckgekoppelteSysteme. Man spricht allgemein von R�uckkopplung, wenn das Ausgangssignal eines Sy-stems { allenfalls ver�andert { auf den Eingang zur�uckgef�uhrt wird, und dort mit demurspr�unglichen Eingangssignal verkn�upft wird. Ist die R�uckf�uhrung linear und die Ver-kn�upfung am Eingang additiv spricht man von Mitkopplung, wird das zur�uckgef�uhrteSignal subtrahiert, spricht man von Gegenkopplung.

KAPITEL 3. SIGNALE UND SYSTEME 65k
x y
-0A
Eine Beispiel einer Gegenkopplung haben wir be-reits als Stromgegenkopplung bei der Emitter-schaltung von Transistoren kennengelernt. Be-zeichnen wir die maximale Verst�arkung mit A0,und subtrahieren wir den k-ten Teil des Ausgangs-signales y vom Eingangssignal x, erhalten wir:y = (x� k � y) �A0 (3.27)Die Gesamtverst�arkung A wird alsoA := yx = A01 + k �A0 oder 1A = 1A0 + k (3.28)A0 heisst auch o�ene Verst�arkung oder open loop gain, also die Verst�arkung, die beio�enem R�uckkopllungsweg wirkt. Die Gr�osse k � A0 heisst auch Schleifenverst�arkungoder loop gain. Ist also die Schleifenverst�arkung gross gegen�uber 1, dann wird die Ge-samtverst�arkung gerade 1=k. (Im Emitterfolgerbeispiel war das �RC=RE).Die Operationsverst�akerschaltungen, die wir unten kennenlernen, bestehen aus sol-chen R�uckkopplungsarten, wobei der Faktor k nicht nur durch Widerst�ande sondernim Prinzip mit Hilfe eines komplexen Netzwerkes oder sogar aktiven Elementen einebeliebige �Ubertragungsfunktion FR(s) als R�uckf�uhrung realisiert werden kann.x y
F S
FR
-+
Bezeichnen wir mit FS(s) die �Ubertragungsfunk-tion des Systems, so erhalten wir als gesamte �Uber-tragungsfunktion eines Systems mit R�uckf�uhrung:F (s) = FS(s)1� FR(s) � FS(s) (3.29) 25.11.983.7 Regelkreise(ab 14.12.98 dsikutiert)Die besprochene R�uckf�uhrung ist nichts anderes als ein Spezialfall eines Regelkreises.Ein solcher hat gegen�uber der R�uckf�uhrung noch einen zus�atzlichen Eingang f�ur dieF�uhrungsgr�osse w (Sollwert). Unser Eingang x wird nun als St�orgr�osse bezeichnet, derAusgang y wird zur Regelgr�osse (Istwert).

KAPITEL 3. SIGNALE UND SYSTEME 66x y
F S
FR
Istwert
Regelstrecke
Regler
Regelgroesse
SollwertFuehrungsgroessew
Stoergroesse
Stellgroesse-
+
Die Regelstrecke stellt dabei inder Regel ein physikalisches Sy-stem dar, von dem eine bestimm-te Eigenschaft (z.B. Temperatur)moeglichst genau auf einem be-stimmten Wert gehalten werdensoll.Diese Gr�osse muss am Messort mit einemMessf�uhler gemessen werden, das Resultatdieser Messung stellt die Regelgr�osse dar. Die Regelabweichung y�w (oder Regeldi�erenzw � y) liegt am Eingang des Reglers, der mit seiner �Ubertragungsfunktion FR darausdie Stellgr�osse (z.B. Heizleistung) erzeugt. Diese wirkt zusammen mit in der Regelunbekannten St�orungen auf die Regelstrecke (z.B. Volumen mit W�armekapazit�at) ein,die mit einer �Ubertragungsfunktion FS die Regelgr�osse y (z.B. Temperatur) ver�andert,usw.Beachte, dass FS die �Anderung der Regelgr�osse als Funktion der Stellgr�osse be-schreibt, diese �Ubertragungsfunktion der Regelstrecke enth�alt also auch das �Uber-tragungsverhalten des Messf�uhlers. Schliesslich wirken St�orungen nicht nur an der ein-gezeichneten Stelle, sondern im Prinzip �uberall auf den Regelkreis ein.Man spricht von der St�or�ubertragunsfunktion FZ und der F�uhrungs�ubertragungsfunk-tion Fw. FZ = @y@x = FS1 + FSFR Fw = @y@w = FS � FR1 + FS � FR (3.30)Beide Funktionen haben den gleichen Nenner. F0 = FR � FS heisst die Kreis�ubertra-gungsfunktion.Im besonderen stellen wir fest, dass f�ur frequenzunabh�angige Regelkreise immer ei-ne permanente Regelabweichung w � y also eine Di�erenz zwischen Ist- und Sollwertbleibt: Ist n�amlich Fw(s) = K konstant (immer < 1), dann wird f�ur eine beliebigeF�uhrungsfunktion dw(t) deren Laplacetransformierte mit K multipliziert. Die inverseLaplacetransformation liefert daraus dy(t). Wegen der Linearit�at der Laplacetransfor-mation wird gerade dy(t) = K � dw(t).Es bleibt dabei eine permanente Regelabweichung dw�dy = (1�K) �dw bestehen,die umso kleiner wird, je gr�osser F0 ist, und somit je n�aher K an 1 heran kommt.3.7.1 Stabilit�at von RegelkreisenDie Kreis�ubertragungsfunktion F0 = FR � FS muss f�ur die Diskussion der Regeleigen-schaften und der Stabilit�atsbetrachtung bekannt sein. Man misst sie, indem man den

KAPITEL 3. SIGNALE UND SYSTEME 67Regelkreis beim Soll-/Istwert { Vergleich unterbricht, und dann Verst�arkung und Pha-sengang des Systems misst, das heisst f�ur harmonische Signale bei w, misst man y alsFunktion der Frequenz.Wird der Nenner zum Beispiel von Fx gleich null, ergibt sich ein Ausgangssignal(�Anderung der Regelgr�osse), selbst ohne dass ein St�orung vorhanden ist. Der Regelkreiswird unstabil. Wie bei der Einf�uhrung der Laplacetransformation erkennen wir also,dass die Stabilit�at des Regelkreises durch die Pole der �Ubertragungsfunktionen de�niertwird. Setzt man deren Nenner (der f�ur Fw und Fx gleich ist!) gleich null, nennt mandas die charakteristische Gleichung des Regelkreises:1 + F0(s) = 0 (3.31)Die L�osungen sk = �k + i!k dieser Gleichung stellen gerade die komplexen Eigen-kreisfrequenzen des Regelkreises dar. Aus der Theorie der Laplacetransformation (siehedie drei Regeln in Abschnitt 3.4) wissen wir, dass der Regelkreis mit der Frequenz !kschwingt, wenn �k � 0 ist, ansonsten bestimmen die sk die Einschwingvorg�ange nachSt�orspr�ungen.Ein Regelkreis ist also genau dann stabil, wenn alle �k < 0 sind. Wenn die charak-teristische Gleichung h�ochstens 2-ten Grades ist:a0 + a1s+ a2s2 = 0 (3.32)dann sind o�ensichtlich genau dann die Realteile der L�osungen negativ, wenn alle Ko-e�zienten ak positiv sind. Dies ist das Hurwitzkriterium f�ur die Stabilit�at eines Regel-kreises. F�ur charakteristische Gleichungen h�oherer Ordnung muss das Hurwitzkriteriumdurch kompliziertere Bedingungen erg�anzt werden (siehe [Ebel78], Seite 33), die aller-dings oft immer noch einfacher sind, als das L�osen der charakteristischen Gleichung.Statt die Nullstellen der charakteristischen Gleichung zu diskutieren, kann man die -1 Stellen von F0(s) untersuchen. Nach einem Satz aus der Funktionentheorie ist die Zahlder -1 Stellen in der rechten Halbebene von F0(s) gleich der Anzahl der Umfahrungender Ortskurve von F0(i!) um -1. F�ur einen stabilen Regelkreis umschliesst sie also denPunkt -1 �uberhaupt nicht. (Nyquistkriterium).Die folgenden zwei Beispiele zeigen solche Ortskurven, also die komplexenWerte derFunktion F0(i!).

KAPITEL 3. SIGNALE UND SYSTEME 68Im(F)
Re(F)
-1
ω
Im(F)
Re(F)
-1
ω
stabil schwingt
F�ur ! ! 1 ist die Schleifenverst�arkung inPraxis immer 0, die Ortskurven enden al-so im Nullpunkt der Darstellungen. F�ur Re-gelkreise mit Integratoranteilen (1=i!), kom-men die Ortskurven f�ur ! = 0 aus dem Un-endlichen, in diesem Fall muss der Punkt -1immer links liegengelassen werden.Es reicht also die Kreis�ubertragungsfunktion als komplexenFrequenzgang (Amplituden-und Phasengang) numerisch zu kennen, um das Nyquistkriterium anwenden zu k�onnen.-1
δ
−1/ε
Im(F)
Re(F)
Der Abstand der Ortskurve vom Punkt -1 sagt et-was �uber die L�ange eines allf�alligen Einschwing-vorganges aus. Man de�niert den Phasenrand �,der die Phasenverschiebung bei Vert�arkung jF0j =1 angibt, sowie den Amplitudenrand �, der dieVerst�arkung (genauer Abschw�achung 1=�) bei derPhasenverschiebung 180� angibt.Der Phasenrand wird auch Phasenreserve genannt. Er gibt direkt die D�ampfung desEinschwingvorganges an. Bei � = 90� erhalten wir gerade den aperiodischen Grenzfall(kritische D�ampfung). Bei � � 60� tritt bei der Sprungantwort ein �Uberschwingen vonca. 4% an, die Einstellzeit ist in diesem Fall besonders klein. (vergleich auch 3.4.1).Normalerweise soll � > 2:5 und � > 30� sein, um gen�ugend stark ged�ampfte Ein-schwingvorg�ange zu bekommen.3.7.2 P { ReglerDer Proportionalregler ist frequenzunabh�angig. Der Ausgang y ist direkt proportionalzum Eingang x: y = KPx FR(s) = KP (3.33)Die Sprungantwort besteht demnach ebenfalls aus einem Sprung. Proportionalreglersind stabil, sie erzeugen aber eine endliche permanente Regelabweichung, die umsokleiner wird, je gr�osser die Regelverst�arkung ist.3.7.3 PI { ReglerWill man die verbleibende Regelabweichung mit der Zeit zum Verschwinden bringen,muss die Kreis�ubertragungsfunktion einen integrierenden Anteil bekommen, der zum

KAPITEL 3. SIGNALE UND SYSTEME 69Beispiel im Regler enthalten sein kann.Der PI { Regler besteht aus einer Kombination von einem P und I System:y = Kpx+KI Z xdt FR(s) = KP + KIs = KP (1 + 1Tns) (3.34). Tn = KP =KI heisst die Nachstellzeit des Reglers. Sprungantwort und Frequenzgang(Bodediagramm) eines idealen PI { Reglers sehen wie folgt aus:KI1/Tn
Tn -90
0
KP
log(f)Beachte, dass der PI Regler f�ur kleine Frequenzen integriert, und f�ur grosse propor-tional verst�arkt, also gerade umgekehrt, wie ein Tiefpass.KI heisst auch dieDurchtritts-kreisfrequenz, bei dieser ist die Verst�arkung des I Anteils gerade 1. Der �Ubergang vondem integralen zum proportionalen Verhalten geschieht bei der Frequenz 1=Tn, dieseheisst deshalb Eckfrequenz. Bei sehr kleinen Frequenzen ergibt der ideale PI { Reglerunendliche grosse Reaktionen, man muss diese in der Praxis k�unstlich beschr�anken, wasnicht immer trivial ist. 14.12.983.7.4 PD { ReglerZur Erh�ohung der Ansprechgeschwindigkeit eines Reglers auf St�orungen oder �Anderungender F�uhrungsgr�osse kann dem P { Regler noch ein di�erenzierender Anteil dazugef�ugtwerden: y = KPx+KDdxdt FR(s) = KP +KDs = KP (1 + Tvs) (3.35)Tv = KD=KP heisst Vorhaltezeit.Sprungantwort und Bodediagramm des idealen PD { Reglers sehen wie folgt aus.

KAPITEL 3. SIGNALE UND SYSTEME 70KP
log(f)
0
90
1/Tv1/KDDer ideale PD { Regler reagiert vorerst mit einer Deltafunktion. In der Praxis han-delt es sich nat�urlich um einen beschr�ankten Ausschlag mit in der Regel exponentiellemAbfall. (siehe bei den Implementationen im n�achsten Kapitel. Im Gegensatz zum Hoch-pass, di�erenziert der PD { Regler bei hohen Frequenzen, bei niedrigen dominiert derProportionalanteil. Bei sehr hohen Frequenzen muss die Reaktion in der Praxis be-schr�ankt werden.3.7.5 PID { ReglerKombiniert man PI und PD zusammen, erh�alt man einen PID { Regler. Er hat denVorteil, dass er auf St�orungen schnell reagiert, und auf lange Frist die Regeldi�erenzexakt auf null regelt. Seine �Ubertragunsfunktion lautet also:FR(s) = KP (1 + 1Tns + Tvs) (3.36)3.7.6 ReglersymboleIn der Regeltechnik werden die verschiedenen �Ubertragungssysteme durch rechteckigeSymbole dargestellt, die im Innern eine vereinfachte Form der Sprungantwort skizzierthaben:
P I PI PD PIDTiefpassF�ur die Implementation dieser Regler siehe sp�ater.

KAPITEL 3. SIGNALE UND SYSTEME 713.7.7 Beispiel Reservoirregelung([Ebel78], page 47 �. und 60 �.)Als Beispiel wollen wir die Dynamik der Regelung der F�ullh�ohe eines Wasserreser-voirs diskutieren.Grundwasserpumpe
m e
Zufluss
Fuellhoehex
m aVerbrauch
Das Reesrvoir wird durch eine Grundwasserpumpemit dem Massen uss me (Stellgr�osse) gef�ullt. An-geschlossene Kunden verbrauchen eine nicht vor-hersehbare Menge ma (Regelgr�osse, Istwert) vonWasser. Ein Regler soll nun die Pumpe so steuern,dass eine m�oglichst konstante F�ullh�ohe x erreichtwird.Als erstes m�ussern wir die �Ubertragungsfunktion der Regelstrecke studieren: Anschau-lich erkennt man sofort, dass z.B. nach einem Sprung von ma die Regelgr�osse x konitnu-ierilich abnimmt. Es handelt sich also um ein integrierendes Verhalten: FS(s) = KIS=s.x
-m
am
e
Fuellhoehe
Regler: steuert Pumpe
w
Sollhoehe
K
Strecke: ReservoirIK
P
Im einfachsten Fall k�onnte man einen P{Regler einsetzen. Nebenstehendes Bild zeigtdas Reservoir in der Symbolik der Regel-theorie. Die Regelstrecke umfasst dabei alleElemente des Reservoirs vom Wasser uss bisund mit des Messf�uhlers der F�ullh�ohe.Die St�or�ubertragunsfunktion wirdFZ(s) = @x@ma = FS(s)1 + FR(s)Fs(s) = KIS=s1 +KPKIS=s = 1=KP1 + T � s (3.37)wobei T = 1=KPKIS und KP die Regelkonstante des P { Reglers. Es handelt sicho�enbar um ein Tiefpassverhalten. Die Sprungantwort wird proportinal zu 1 � e�t=T(siehe bei der Tiefpassdiskussion). Es ergibt sich also eine permanente Regelabweichungvon dma=KP .M�ochte man die Regelabweichung wegregeln, muss man einen I { Regler einsetzen.Ein reiner I { Regler w�urde aber zu einem Schwingen des Regelkreises f�uhren, da wegenden beiden I Teilen die Phasenverschiebung von F0 = FRFS zu 180� und der Phasenrandsomit zu 0 w�urde.

KAPITEL 3. SIGNALE UND SYSTEME 72x
-m
am
ew
K
IK
P Tn
Man verwendet deshalb zweckerm�assigerweise einen PI {Regler mit Nachstellzeit Tn und Proportionalanteil KP .Mit FS(s) = KIS=s FR(s) = KP (1 + 1Tns) (3.38)erhalten wir f�ur die St�or�ubertragungsfunktionFZ(s) = TnKP � s1 + Tns+ TnKPKIS s2 (3.39)Der Nenner dieses Ausdrucks gibt uns durch Nullsetzen die charakterische Gleichung,die in diesemFalle quadratisch ist. Wir k�onnen deshalb das Hurwitzkriteriumanwenden:F�ur einen stabilen Fall m�ussen alle Parameter psoitiv sein, insbesondere Tn > 0. F�urTn ! 0 (d.h. die Eckfrequenz des PI { Reglers geht gegen unendlich, d.h. kein P Anteil),wird das Hurwitzkriterium verletzt, der Regelkreis schwingt.Setzen wir als Abk�urzung!20 = KPKISTn � = 12qKPTnKIS (3.40)so wird die charakterische Gleichung zu1 + 2 �!0 s+ 1!20 s2 = 0 (3.41)und die St�or�ubertragungsfunktionFZ(s) = KIS!20 s1 + 2 �!0 s+ 1!20 s2 (3.42)Um die Sprungantwort zu berechnen, m�ussen wir FZ(s) mit der lapalcetransformiertender Sprungfunktion, also 1=s, multiplizieren, und das Resultat zur�ucktransformieren.Wir erhalten damit als Sprungantwort:x(t) = KIS!0 � 1p1� �2 e��!0t � sin (!0p1� �2 � t) (3.43)In der Tat sehen wir, dass der Regelkreis f�ur � ! 0 (kein P { Anteil) f�ur immerschwingt. Dies entspricht dem Fall, wo die L�osungen der charakteristischen Gleichungrein imagin�ar sind und somit auf der imagin�aren Achse liegen, also nicht mehr im linkenHalbraum. 16.12.98

KAPITEL 3. SIGNALE UND SYSTEME 73Um eine optimale D�ampfung zu bekommen, muss � ! 1 gehen. Das bedeutet f�urdie Regelparameter TnKP = 4KIS (3.44)Man erkennt hier auch wieder die wichtige Regel, dass f�ur die Dimensionierung einesReglers die Parmeter der Regelstrecke bekannt sein m�ussen.(Nat�urlich gibt es F�alle, wo die dynamischen Eigenschaften der Regelstrecke nichtzum vorneherein bekannt sind und sich evt. auch w�ahrend dem Betrieb �andern k�onnen.Man kann aber nat�urlich mit einigem Aufwand auch Regelsysteme bauen, die ihreEigendynamik laufend analysieren, und die Regelparamter entsprechend anpassen. Manspricht dann von adaptiver Regelung.)Die charakterische Gleichung wird dann zu (1+ s=!0)2 = 0 mit der einzigen L�osungs0 = �!0. Wendet man auf diesen Fall unsere Methode wieder an, erh�alt man alsSprungantwort auf eine St�orung x(t) = KIS !0 t e�!0t (3.45)Die Regelabweichung wird also langfristig verschwinden. Wenn man ein leichtes �Uber-schwingen in Kauf nimmt, dann wird die Regelabweichung schneller klein.Im folgenden Bodediagramm sind Amplituden- und Phasengang der Regelstreckeund des Reglers sowie ihr Produkt ('total' = Kreis�ubertragunsfunktion) eingezeichnet.Beachte, dass der Phasenrand von der Eckfrequenz des PI { Reglers abh�angt. Die opti-male Einschwingdauer wird also durch die Wahl von Tn bestimmt. Um sicherzustellen,dass der Regler nicht schwingt, muss die Eckfrequenz so gew�ahlt werden, dass der totaleAmplitudengang die Achse mit der Steigung � 1 schneidet.

KAPITEL 3. SIGNALE UND SYSTEME 74-90
-180
Phase
Amplitude
ReglerStrecke
Total
Regler
Strecke
Total Phasenrand
1
Wie wollen auch das Nyquistkriterium anschauen:Im(F)
ω
δ Re(F)
Im nebenstehenden Bild ist die Ortskurve unseres Reg-lers dargestellt. Beachte, dass der Phasengang f�ur sehrkleine Frequenzen fast 180� wird. Da dies jedoch weitweg vom Durchgang der Verst�arkung durch die 0dB Achse (Durchtrittsfrquenz) passiert, besteht keineSchwingungsgefahr.Die Phasenreserve � ist eingezeichnet. Der Amplitudenrand ist 1, da die Phasen-verschiebung von 180� nur asymptotisch erreicht wird.

Kapitel 4Analoge Schaltungstechnik4.1 Operationsverst�arker: Aufbau und Kennwerte(siehe [Kori98], S.342 bis 346)Ein Operationsverst�arker ist ein Verst�arker mit sehr grosser Verst�arkung. Er wird inder Regel mit Gegenkopplung durch ein meist passives Netzwerk betrieben, sodass dieVerst�arkung durch dessen Parameter bestimmt ist.Ein Operationsverst�arker hat zwei Eing�ange V+ und V� und ein Ausgang Vo. SeineVerst�arkung A0 soll m�oglichst hoch sein, sie liegt bei kleinen Frequenzen im Bereich104 : : :105 und ist de�nert durchVo = A0 � Vd mit Vd = V+ � V� (4.1)w�ahrend der Eingangsstrom m�oglichst klein sein soll (kann durchaus im pA Bereichliegen). �Ublicherweise haben Operationsverst�arker eine bipolare Spannungsversorgung(meist �15V), der Ausgang kann alle Werte dazwischen annehmen.Operationsverst�arker sind in der Regel aus drei Teilstufen aufgebaut:1. Die Eingangsstufe besteht aus einem Differenzverst�arker (siehe Abschnitt 2.6.1)mit aktiver Last.2. Eine Zwischenstufe (oft als Emitterschaltung ausgebildet) dient der weiteren Ver-st�arkung und enth�alt die frequenzgangbestimmenden Elemente.3. Die Endstufe besteht aus einem Gegentaktverst�arker (siehe Abschnitt 2.6.3) imB{Betrieb (push{pull). 75

KAPITEL 4. ANALOGE SCHALTUNGSTECHNIK 76Operationsverst�arker sind als integrierte Schaltungen in verschiedensten Bauformen(zum Teil auch mehrere in einem Geh�ause) erh�altlich.KennwerteMit dem Ausgangssteuerbereich bezeichnet man den Wertebereich der Ausgangsspan-nung, seine Grenzen liegen in der Regel 0.2 bis 3 V �uber bzw. unterhalb der Versor-gungsspannung (oft unsymmetrisch).Der Ausgangswiderstand betr�agt typisch 10 : : : 1000 . (Beachte aber, dass diesermit Hilfe der Gegenkopplung ver�andert werden kann).Verschiedene Parameter, insbesondere die Verst�arkung werden sowohl im Di�erenz-betrieb, als auch im Gleichtaktbetrieb angegeben. Die Di�erenzverst�arkung Ad sollm�oglichst gross, die Gleichtaktverst�arkung m�oglichst klein sein.Ad = VoV+ � V� Ag = Vo12(V+ + V�) (4.2)Unter Gleichtaktunterdr�uckung (common mode rejection) versteht man deren Verh�altnisAd=Ag.Der Eingangswiderstand betr�agt je nach Bauart bis zu 1012 . Man unterschie-det zwischen Di�erenzeingangswiderstand und Gleichtakteingangswiderstand. Er ver-gr�ossert sich mit der Gegenkopplung noch.Operationsverst�arkung haben eine nicht vernachl�assigbareO�setspannung, das heissteine endliche Eingangsdi�erenzspannung, bei der die die Ausgangsspannung null wird.Sie betr�agt in der Regel einige mV. Das kritische Gr�osse dabei ist deren Temperatu-rabh�angigkeit, die O�setspannungsdrift. Diese betr�agt typisch einige �V/K.Die Verst�arkung nimmt bei hoher Frequenz ab. Der E�ekt beginnt sich ab derGrenzfrequenz bemerkbar zu machen. Bei der Transitfrequenz fT (auch Verst�arkungs-bandbreiteprodukt oder unity gain freqeuncy genannt) ist die Verst�arkung gerade eins.Der Frequenzgang wird nat�urlich von der externen Beschaltung beein usst. Dabei istbesonders zu beachten, dass bei fT die Phasenverschiebung sich von 180� signi�kantunterscheidet (Phasenrand, siehe Abschnitt 3.7.1), da sonst der Vest�arker schwingenwird.
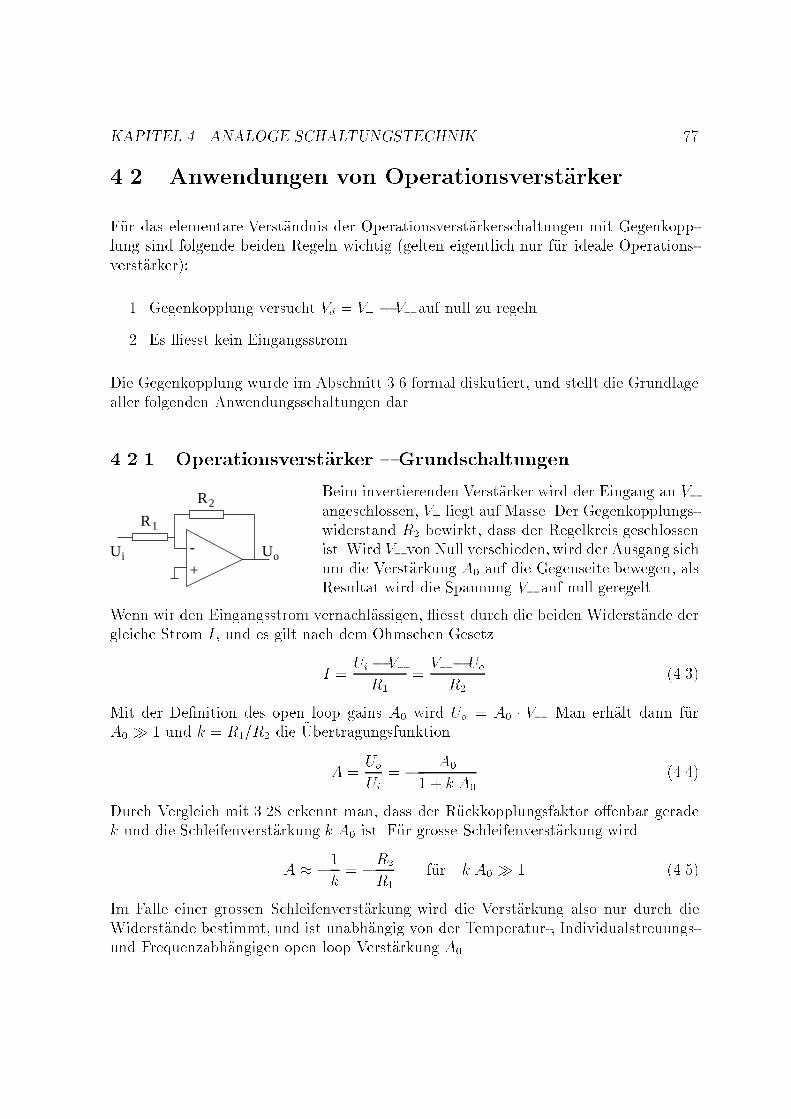
KAPITEL 4. ANALOGE SCHALTUNGSTECHNIK 774.2 Anwendungen von Operationsverst�arkerF�ur das elementare Verst�andnis der Operationsverst�arkerschaltungen mit Gegenkopp-lung sind folgende beiden Regeln wichtig (gelten eigentlich nur f�ur ideale Operations-verst�arker):1. Gegenkopplung versucht Vd = V+ � V� auf null zu regeln.2. Es iesst kein EingangsstromDie Gegenkopplung wurde im Abschnitt 3.6 formal diskutiert, und stellt die Grundlagealler folgenden Anwendungsschaltungen dar.4.2.1 Operationsverst�arker { Grundschaltungen-
+U Ui o
R1
R2Beim invertierenden Verst�arker wird der Eingang an V�angeschlossen, V+ liegt auf Masse. Der Gegenkopplungs-widerstand R2 bewirkt, dass der Regelkreis geschlossenist. Wird V� von Null verschieden,wird der Ausgang sichum die Verst�arkung A0 auf die Gegenseite bewegen, alsResultat wird die Spannung V� auf null geregelt.Wenn wir den Eingangsstrom vernachl�assigen, iesst durch die beiden Widerst�ande dergleiche Strom I, und es gilt nach dem Ohmschen GesetzI = Ui � V�R1 = V� � UoR2 (4.3)Mit der De�nition des open loop gains A0 wird Uo = A0 � V�. Man erh�alt dann f�urA0 � 1 und k = R1=R2 die �UbertragungsfunktionA = UoUi = � A01 + k A0 (4.4)Durch Vergleich mit 3.28 erkennt man, dass der R�uckkopplungsfaktor o�enbar geradek und die Schleifenverst�arkung k A0 ist. F�ur grosse Schleifenverst�arkung wirdA � �1k = �R2R1 f�ur k A0 � 1 (4.5)Im Falle einer grossen Schleifenverst�arkung wird die Verst�arkung also nur durch dieWiderst�ande bestimmt, und ist unabh�angig von der Temperatur-, Individualstreuungs-und Frequenzabh�angigen open loop Verst�arkung A0.

KAPITEL 4. ANALOGE SCHALTUNGSTECHNIK 78Den Punkt V� bezeichnet man mit virtuelle Masse, solange der Regelkreis funktio-niert, ist V� � 0. Die Eingangsimpedanz dieses Verst�arkers wird somit gerade R1, istalso relativ klein.R2
R1
UiUo
+-
Der nichtinvertierender Verst�arker hat im Gegensatz dazueinen sehr hohen Eingangswiderstand, der durch den Aufbaudes Operationsverst�arkers gegeben ist. Die Gegenkopplung er-folgt in diesem Fall �uber einen Spannungsteiler:V+ = Ui ; V� = Uo R1R2 +R1 ) A = A01 + k A0 ; k := R1R1 +R2 (4.6)F�ur grosse Schleifenverst�arkungen k A0 erhalten wir wieder, dass die totale Verst�arkunggerade A � 1k = R2R1 + 1 (4.7)Diese Schaltung nennt man wegen ihres hohen Eingangswiderstandes auch Elektrome-terverst�arker 3.12.98Spezialf�alle der GrundschaltungenDie folgenden Schaltungen sind leichte Abwandlungen und Spezialf�alle der Grundschal-tungen:Ui
Uo+-
Der Impedanzwandler ist ein nichtinvertierender Verst�arker mitk = 1, also A = 1. Er dient zur Umwandlung einer hochohmigenSpannungsquelle in eine niederohmige.+
R
R
-
Das bipolare Koe�zientenglied erlaubt eine einstellbareVerst�arkung �uber beide Vorzeichen: Steht das Potentiometerim oberen Anschlag ist sie +1 (Impedanzwandler), im unterenAnschlag -1 (invertierender Verst�arker). In der Mittelstellungist die Ausgangsamplitude gerade 0.-
+Uo
R
I Der Transimpedanzverst�arker wandelt einen Strom in eine Span-nung um. Es wird Uo = R � I. Der Eingangswiderstand ist R=A0,also sehr klein, sodass eine Stromquelle als solche behandelt wird.Transimpedanzverst�arker kommen insbesondere als Verst�arker f�ur Sensoren, die einenStrom liefern, zum Einsatz.

KAPITEL 4. ANALOGE SCHALTUNGSTECHNIK 79+-
I
R
U Der Transadmittanzverst�arker oder Transkonduktanzverst�arker(OTA, \operational transconductance ampli�er") stellt eine span-nungsgesteuerte Stromquelle dar: Der Aussgangswiderstand wirdR �A0. Der Strom wird I = U=R.Transkonduktanzverst�arker werden besonders zumBeispiel f�ur das Ansteuern von Leucht-dioden zur Signal�ubertragung oder f�ur Kabeltreiber mit de�nierter Impedanz ben�utzt.4.2.2 Weitere Operationsverst�arkerschaltungenDie folgenden Schaltungen stellen verschiedene Anwendungsbeispiele dar. F�ur das Ver-st�andnis halte man sich immer die beiden in der Einleitung erw�ahnten Regeln (Ein-gangsstrom=0, Eingangsdi�erenz wird auf null geregelt) vor Augen.Last
0.1
100
1kV
Vin
mon
-+
Diese Schaltung stellt einen Strommonitor dar (aus[Horo97], p 253). Die Spannung am Ausgang Vmon lie-fert eine Spannung, die proportional zum Strom in derLast ist, und zwar in der angegebenen Dimensionierunggerade 1 V/A. Der Operationsverst�arker regelt dabeidie Basisspannung des Transistors und damit dessenKollektorstrom gerade so, dass der Spannungsabfall am100 Widerstand gleich dem am 0.1 ist, also auf ge-nau 1/1000 des Laststromes. Am 1 k Widerstand f�alltdamit die gew�unschte Spannung ab.Der analoge Addierer besteht aus einem invertierenden Verst�arker:U
Uout
Roi iR
-+
Da der V� Eingang als virtuelle Masse fungiert, werdendie Str�ome, die die drei Eingangsspannungen Ui erzeu-gen, einfach aufaddiert. Durch Wahl verschiedener Wi-derst�andeRi kann den Spannungen ein unterschiedlichesGewicht in der Summe gegeben werden:Uout = �Ro �Xi UiRi (4.8)

KAPITEL 4. ANALOGE SCHALTUNGSTECHNIK 80+
- Falls alle 4 Widerst�ande genau gleich sind, stellt die nebenstehendeSchaltung einen Subtrahierer dar. Versuchen Sie die Ausgangsspan-nung herzuleiten { auch f�ur verschiedene Widerst�ande!Nachteilig an der Subtrahierschaltung ist ihr relativ kleiner Eingangswiderstand.Schaltet man Elektrometerverst�arker (siehe vorheriger Abschnitt) oder Impedanzwand-ler vor beide Eing�ange des Subtrahierers, nennt man die entstehende Schaltung einenInstrumentenverst�arker.Diese folgenden beiden Schaltungen stellen einen logarithmischer Verst�arker (links)und einen exponentieller Verst�arker (rechts) dar.-+
-+Dabei wird die exponentielle Form der Diodengleichung f�ur die Basis-Emitter-Diodeund die Linearit�at zwischen Basis- und Kollektorstrom ausgen�utzt:IC = I0e eUBEkT ) UBE � ln IC (4.9)Diese Schaltungen werden f�ur die Kompression und Dekompression von dynmischenBereichen ben�utzt: Schwanken die Messwerte �uber viele Dekaden, so ist es unm�oglich,einen ADC zu bauen, der im ganzen Bereich hohe Genauigkeit hat. Mit einem vorge-schalteten Logarithmierer erreicht man, dass �uber den gesamten Messbereich der ADCden gleichen relativen Messfehler erzeugt.Der Integrator basiert ebenfalls auf dem Konzept der virtuellen Masse:
-+
UoU
i
R
C
Der durch den Widerstand iessende Strom l�adt denKondensator auf, die Ausgangsspannung wird damitUo = QC = 1C Z Idt = 1RC Z Uidt (4.10)Man koennte also auch von einem Tiefpass mit unendlich kleiner Grenzfrequenz spre-chen. Die Grenzferquenz wird in Praxis durch die Leerlaufverst�arkung A0 des verwede-ten Operationsverst�arkers de�niert. Man vergegenw�artige sich das Bodediagramm.
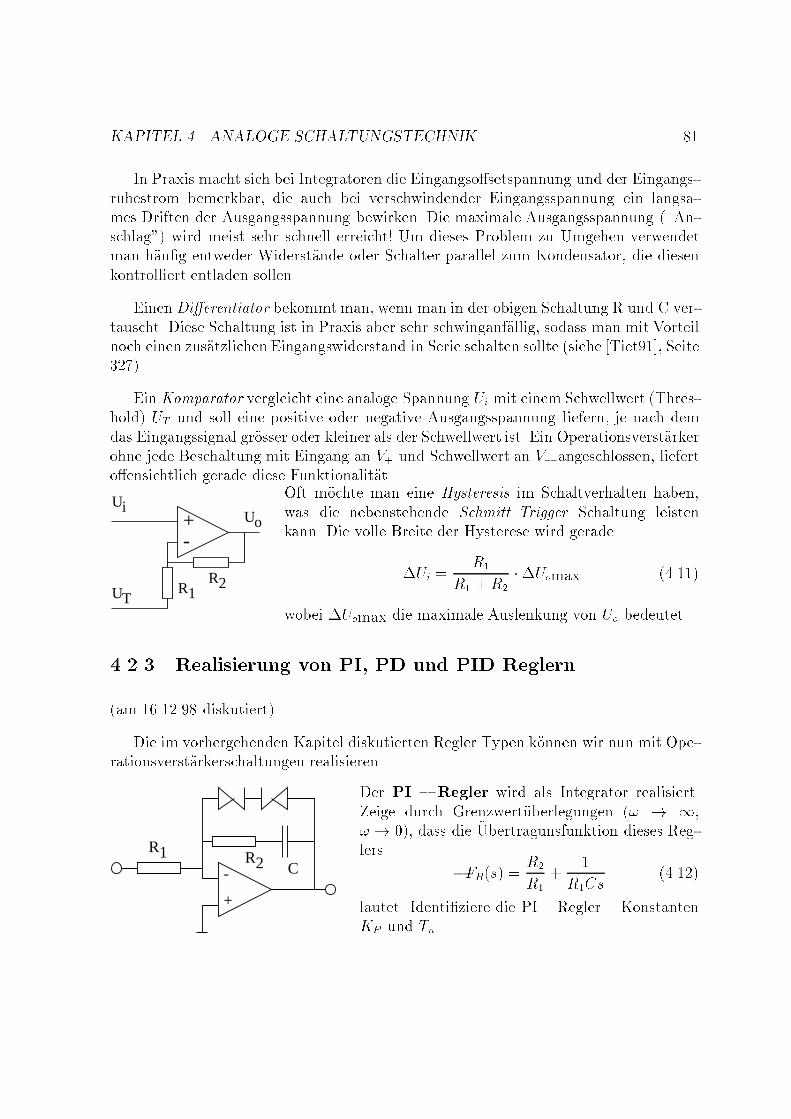
KAPITEL 4. ANALOGE SCHALTUNGSTECHNIK 81In Praxis macht sich bei Integratoren die Eingangso�setspannung und der Eingangs-ruhestrom bemerkbar, die auch bei verschwindender Eingangsspannung ein langsa-mes Driften der Ausgangsspannung bewirken. Die maximale Ausgangsspannung (\An-schlag") wird meist sehr schnell erreicht! Um dieses Problem zu Umgehen verwendetman h�au�g entweder Widerst�ande oder Schalter parallel zum Kondensator, die diesenkontrolliert entladen sollen.Einen Di�erentiator bekommtman, wenn man in der obigen Schaltung R und C ver-tauscht. Diese Schaltung ist in Praxis aber sehr schwinganf�allig, sodass man mit Vorteilnoch einen zus�atzlichen Eingangswiderstand in Serie schalten sollte (siehe [Tiet91], Seite327).Ein Komparator vergleicht eine analoge Spannung Ui mit einem Schwellwert (Thres-hold) UT und soll eine positive oder negative Ausgangsspannung liefern, je nach demdas Eingangssignal gr�osser oder kleiner als der Schwellwert ist. Ein Operationsverst�arkerohne jede Beschaltung mit Eingang an V+ und Schwellwert an V� angeschlossen, lieferto�ensichtlich gerade diese Funktionalit�at.U
oUi
-+
RR
12
UT
Oft m�ochte man eine Hysteresis im Schaltverhalten haben,was die nebenstehende Schmitt{Trigger Schaltung leistenkann. Die volle Breite der Hysterese wird gerade�Ui = R1R1 +R2 ��Uomax (4.11)wobei �Uomax die maximale Auslenkung von Uo bedeutet.4.2.3 Realisierung von PI, PD und PID Reglern(am 16.12.98 diskutiert)Die im vorhergehenden Kapitel diskutierten Regler Typen k�onnen wir nun mit Ope-rationsverst�arkerschaltungen realisieren.-
+
CR2
R1
Der PI { Regler wird als Integrator realisiert.Zeige durch Grenzwert�uberlegungen (! ! 1,! ! 0), dass die �Ubertragunsfunktion dieses Reg-lers �FR(s) = R2R1 + 1R1Cs (4.12)lautet. Identi�ziere die PI { Regler { KonstantenKP und Tn.

KAPITEL 4. ANALOGE SCHALTUNGSTECHNIK 82Die beiden Zenerdioden zeigen eine M�oglichkeit auf, wie f�ur ganz kleine Frequenzendie Ausgangsamplitude begrenzt werden kann, ohne dass sich eine Verschlechterung derLinearit�at des Reglers ergibt. Die Steilheit der Sprungantwort ist im �ubrigen durch dieSlewtime des Operationsverst�arkerausganges bestimmt.-
+
R2R1
C Der PD { Regler. Es gilt�FR(s) = R2R1 +R2Cs (4.13)Die Eckfrequenz wird 1=R1C.Die Deltafunktion der idealen Sprungantwort hat eine Anstiegszeit, die unter ande-rem von der Slew Time begrenzt ist, w�ahrend der Abfall exponentiell erfolgt mit derZeitkonstanten R2C. Beachte, dass in dieser Zeit der Operationsverst�arker nicht in sei-ner normalen Funktion arbeitet: Der - Eingang wird positiv, der Ausgang geht in dennegativen Anschlag, die virtuelle Masse ist deshalb kurzfristig keine solche.-
+
R2R1
C1 C2 Der PID { Regler hat die �Ubertragungs-funktion�FR(s) = R2R1+C1C2+ 1R1C2s+R2C1s (4.14)Diskutiere ausf�uhrlich das Bodediagramm, unter der Annahme, dass der Operations-verst�arker den openloop gain A0 hat, der ab der Frequenz !a � 1=R2C1 mit Steigung-1 abf�allt.4.2.4 Anwendungen mit DiodenSpitzenwertdetektor: [Tiet91], Seite 877. 7.12.98Vollwegpr�azisionsgleichrichter: [Tiet91], Seite 868.4.2.5 Aktive Filter(siehe [Kori98], Seite 360 �.)
KAPITEL 4. ANALOGE SCHALTUNGSTECHNIK 83Mit Hilfe von Operationsverst�arkern lassen sich fast beliebige �Ubertragungsfunk-tionen realisieren. Man spricht von Hoch-, Band- und Tiefp�assen nter Ordnung, wenn nenergiespeichernde Elemente (C oder L) vorhanden sind. Gleichzeitig kommt n im Nen-nerpolynom als h�ochste Potenz vor und es gibt n Pole. Ihre Werte bestimmen die Formdes Frequenzganges an der Grenzfrequenz: Konjugiert{komplexe Pole erzeugen einenpositiven \overshooot" (Resonanz�uberh�ohung), reelle Pole einen langsamen �Ubergangvom Durchlassbereich in den Sperrbereich.Aktive Filter h�oherer Ordnung lassen sich immer durch in Serie geschaltete Fil-ter 2. Ordnung realisieren. F�ur diese wiederum kann man nun die Koe�zienten desNennerpolynoms noch w�ahlen. Optimiert man diese f�ur m�oglichst gutes Rechteck�uber-tragungsverhalten im Durchlassbereich, erh�alt man ein Bessel�lter. Optimiert man aufm�oglichst glatten Frequenzgang erh�alt man ein Butterworth�lter. Will man eine ma-ximalen Steilheit am Anfang des Sperrbereichs und nimmt man eine Welligkeit desFrequenzganges im Durchlassbereich in Kauf, verwendet man ein Tschebysche��lter.Tabellen der Koe�zienten, und die dazugeh�origen Schaltungen �ndet man in [Kori98],Seite 363 �., [Tiet91], Seite 391 �. oder in [Best87].4.2.6 Oszillatoren und PLLDreieck- Rechteckgenerator [Tiet91], p481 , auch mit 4 Dioden 9.12.98ebenso gesteuert (VCO): [Horo97], p.240Frequenz = 150 � Vin=V+'555Skizze, Horowitz page 287 oben, aber rechte Logik als blackbox.Einer der ber�uhmtesten je hergestellten chips ist der '555 Timer. Er besteht ausnur aus zwei Komparatoren und etwas Schaltlogik. Er funktioniert mit einer einzigenSpeisespannung (je nach typ von 1 bis 18 V). Die Bedeutung der drei Steuereing�angeist:� reset (Pin 4) Ein negatives Signal setzt den Ausgang zur�uck auf LOW.� trigger (Pin 2) Ein kurzes negatives Signal < 13V+ an diesem Eingang setzt denAusgang auf HIGH.

KAPITEL 4. ANALOGE SCHALTUNGSTECHNIK 84� threshold (Pin 6) Ein kurzes positives Signal > 23V+ setzt den Ausgang auf LOW.Neben dem OUTPUT (Pin 3) gibt es noch ein weiteres Ausgangssignal discharge(Pin 7). Es handelt sich um einen \open collector" Ausgang, der aktiv wird, wenn deroutput low ist. Schliesslich kann mit dem Eingang reference Pin 5, der Spannungsteilerbeein usst werden.Die einfachste Anwendung ist ein gew�ohnlicher OszillatorZeichnung Horowitz, page 287 untenDie Periode betr�agt T = ln 2�(RA+2RB)�C. Die Stabilit�at ist etwa 1% (Temperatur,Exemplarstreuung, Spannungsversorgung). Sie laufen etwa bis 3 MHz.Der '555 wird auch zur Erzeugung von de�nierten Einzelpulsen (trigger als Eingang,zum Beispiel Power up reset) und anderes verwendet. Eine zeitlang war es bei denElektroniksfreaks Mode in der Ka�eepause neue Anwendungsschaltungen f�ur den '555zu er�nden...Bei obiger Schaltung ist die HIGH Zeit stets l�anger als die LOW Zeit. F�ur die Er-zeugung sehr kurzer Pulse kann man die nebenstehende Schaltung verwenden, Horowitzpage 288, die eine unabh�angige LOW und HIGH Zeit erlaubt.Verwendet man zum Laden des Kondensators eine Stromquelle, so kann man einenS�agezahn erzeugen (Horowitz, page 290). Mit einer steuerbaren Stromquelle kann mandann einen steuerbaren Oszillator bekommen.QuartzoszillatorenQuartz [Horo97], page 300, Parallel und Serieresonanz.Nachlaufsynchronisation, PLL(siehe [Tiet91], p 954. [Horo97], page 641-653)Der phase locked loop (PLL) ist ein wichtiger Anwendungsfall der Regeltheorie inder Nachrichtentechnik. Dabei m�ochte man die Frequenz f eines variablen Oszillatorsso einstellen, dass sie mit einer Bezugsfrequenz fr �ubereinstimmt, uns zwar so genau,dass auch die Phasendi�erenz der beiden Frequenzen genau konstant bleibt.

KAPITEL 4. ANALOGE SCHALTUNGSTECHNIK 85Eine typische Anwendung ist die Erzeugung einer Frequenz, die ein ganzzahligesVielfaches einer externen Bezugsfrequenz ist.Sollwert
Istwert
Phasen-detector
Zaehler:n
Regler
VCO
Neben einem steuerbaren Oszillator VCO braucht man also einen Phasendetektorund einen Z�ahler, letztere werden wir in dem digitalen Teil diskutieren. Kritisch istinsbesondere die Dimensionierung des Reglers.a=b
y
a
b
y
a b
VV
Phasendiff.
Der einfachste Phasendetektor besteht aus einem EX-OR Schaltung, die ein Signal produziert, wenn a 6= b ist(siehe sp�ater in der Digitalelektronik). Dan anschliessen-de RC Glied mittelt diese Pulse, sodass eine Spannungentsteht, die proportional der Phasendi�erenz ist.Beachte, dass es jeweils zwei L�osungen gibt, der Regel-kreis wird aber nur auf einer Flanke stabil laufen, aufder anderen wird die Frequenz davonlaufen, bis die guteFlanke wieder erreicht wird.Um zu verhindern, dass sich eine permanente Regelabweichung ergibt, m�ochte manals Regler gerne ein Integral - Regler verwenden. Die Regelstrecke stellt aber ebenfallseinen Integrator dar, da bei konstanter Frequenzdi�erenz die Phase allm�ahlich zunimmt.Zusammen erg�abe sich somit eine Phasenverschiebung innerhalb des Regelkreises von180� , was zu einem schwingenden Regelkreis f�uhren w�urde.Man verwendet deshalb einen PI-Regler mit einer Eckfrequenz f1, die unterhalb derStelle f2 liegt, wo die Kreis - Verst�arkung 1 ist. (vern�unftig ist 1/4 bis 1/10 davon, z.B.f2 = 2 Hz, f1 = 0:5 Hz).

Kapitel 5SensorenSensoren oder Messf�uhler dienen der Umformung der zu messenden physikalischenGr�osse in eine elektrische Spannung, Strom oder Widerstands�anderung, die von Elek-tronik und Datenacquisitionssystemen weiterverarbeitet werden k�onnen.Messf�uhler haben genauso wie alle anderen Systeme eine �Ubertragunsfunktion FM(s),die sowohl vom F�uhler, wie seiner Ankopplung an das zu untersuchende System abh�angt.Zum Beispiel hat ein Temperaturf�uhler ungef�ahr das Verhalten eines Tiefpasses, seinecharakterische Zeit h�angt von dem Umgebunsmedium (z.B. Wasser oder Luft) ab.Fr�uher wurde gefordert, dass der Zusammenhang zwischen der physikalischen Gr�osseund der abgegebenen Spannung m�oglichst linear sein soll. Dies Forderung ist in Hinblickauf die durch nachgeschaltete Prozessoren heute leicht automatisch durchf�uhrbare Lina-risierung abgel�ost worden durch die Forderung nach Stabilit�at und Reproduzierbarkeitder �Ubertragunsfunktion.5.1 LichtStrahlungsdetektoren beruhen grunds�atzlich auf dem Photoe�ekt, wobei man zwischen�ausserem und innerem Photoe�ekt unterschieden wird.Beim ersteren wird ein Teil der vom Photon auf das Elektron �ubertragenen Ener-gie dazu benutzt, um die Austrittsarbeit zu �uberwinden, das Elektron kann nun miteinem separaten Detektor nachgewiesen werden. Die Auetrittsarbeit stellt eine untereSchwellenenergie f�ur den Nachweis von Licht dar.86

KAPITEL 5. SENSOREN 87Bei inneren Photoe�ekt wird die Energie dazu verwendet, um zum Beispiel in einemHalbleiter den Unterschied zwischen Valenz- und Leitungsband zu �uberwinden und sozus�atzliche Leitungstr�ager zu erzeugen. In diesem Fall ist die Energiedi�erenz zwischenLoch- und Elektronzustand f�ur die untere Detektionsschwelle relevant. Mit Hilfe vonDotierungen kann diese sehr niedrig gemacht werden.5.1.1 PhotovervielfacherPhotovervielfacher oder Photomultiplier funktionieren nach dem Prinzip des �ausserenPhotoe�ekts. Elektronen, die aus der Photokathode emittiert werden, werden durch eineAnzahl von weiteren Elektroden (Dynoden) beschleunigt, wobei sie aus den DynodenSekund�arelektronen ausl�osen (typisch 6 bis 10 St�uck). Das ganze System muss sich imVakuum be�nden.Die Quantene�zienz �, also der Bruchteil der Photonen, die an der Photokathodeein Elektron erzeugen, betr�agt in der Regel weniger als 20%. Die untere Energiegrenzewird durch die Austrittsarbeit des Materials (C�asium oder C�asiumlegierungen) gegeben,die obere durch die Durchsichtigkeit des Vakuumfensters f�ur die Strahlung.Die Gesamtverst�arkung des Vervielfachers betr�agt ca. 106 bis 108 h�angt aber �uberdie Zahl der Sekud�arelektronenemission sehr stark vom elektrischen Feld ab, sodass dieSpannung sehr gut konstant gehalten werden muss.Photovervielfacher werden mit Vorteil dort eingesetzt, wo� schnelle und zeitgenaue Signale ben�otigt werden (typische Verz�ogerungszeit ca 30ns, sehr stabil, typische Anstiegszeit 1 ns).� bestes SIgnal/Rausch verh�altnis gefordert ist, insbesondere wenn eine rauschfreieDetektion von einzelnen Photonen n�otig ist.� hohe Homogenit�at der Emp�ndlichkeit auf der Dektektions �ache.Das Langzeitverhalten der Verst�arkung von PM's ist allerdings nicht besonders gut,und nicht vorherzusagen, sie eignen sich also nicht f�ur genaue Amplitudenmessungen.Sie haben eine schlechte Quantene�zienz. F�ur Systeme mit vielen Kan�alen sind sieausserdem zu gross, zu teuer und zu unhandlich.

KAPITEL 5. SENSOREN 885.1.2 PhotodiodenPhotodioden bestehen aus einer pn Halbleitergrenzschicht, die in der Regel in der Sperr-richtung betrieben wird. Man verwendet zum Beispiel leicht dotiertes n-Basismaterialund bringt eine sehr stark dotierte, sehr d�unne, durchsichtige p-Schicht dar�uber an.Das ergibt eine dicke Sperrschicht, die sich vor allem auf der n-Seite be�ndet. Die dar-in zu ELektron{Loch Paaren konvertierenden Photonen erzeugen einen zum normalenSperrstrom (Dunkelstrom) zus�atzlichen Photostrom Iph.Das Anlegen einer Sperrspannung erh�oht die Dicke der Sperrschicht zus�atzlich,erh�oht also die Absorbtionswahrscheinlichkeit und somit die E�zienz. Ausserdem wirddadurch die Kapazit�at vermindert, sodass die Photodiode schneller anspricht und dasRauschen des anschliessenden Verst�arker sich weniger auswirkt. Meistens wird die Ef-�zienz dadurch verbessert, indem man p.i.n. Dioden verwendet, sodass die gesamteintrinsische Schicht als Konverter genutzt werden kann.Sei � der Energie uss des Lichtes, � die Quantene�zienz, dann wirdIph = e � � �h� (5.1)Der Photostrom nimmtmit der Wellenl�ange also zu, bis zu einer Grenzwellenl�ange �max,die durch die Schwellenergie f�ur Erzeugung von ELektron{Loch Paaren gegeben ist. Die-ser Photostrom addiert sich zum normalen aus der Diodengleichung, der Gesamtstromwird I = I0(e eUkT � 1)� e��h� (5.2)Die Kennlinie verschiebt sich also in Stromrichtung parallel.Je nach Anwendung unterscheidet man im wesentlichen drei verschiedene Beschal-tungen. F�ur h�ochste Emp�ndlichkeit und Linearit�at auch bei ganz kleinen Intensit�atenwird der Arbeitsbereich A mit Vorspannung Ub gew�ahlt. Allerdings ergibt sich einSchrottrauschen des Dunkelstromes. Je gr�osser Ub desto kleiner wird aber die Kapa-zit�at und also desto schnellere Ansteigszeit des Signales kann erreicht werden.R
Ub
Uph
Φ
A
BC
+-
U
I
A:B:

KAPITEL 5. SENSOREN 89Der Kurzschlussbetrieb B eignet sich vor allem f�ur genaue und reproduzierbare Mes-sungen der Lichtintesit�at mit sehr guter Linearit�at, die zweckm�assigerweise mit demskizzierten Transimpedanzwandler realisiert wird. Da die Spannung nun verschwindet,wird die Kapazit�at nicht geladen, es ergibt sich eine schnellere Ansprechgeschwindigkeit,allerdings verst�arkt die Kapazit�at nun das Eingangsrauschen des Operationsverst�arkers.Diese Schaltung eignet sich weniger f�ur kleine Lichtintensit�aten.Soll die Photodiode als Solarzelle Energie liefern, wird sie im Punkt C im sogenann-ten photovoltaischenMode betrieben. Hier ist sie allerdings langsam in der Reaktion undstark nichtlinear in der Lichtausbeute. Daf�ur wird wegen dem fehlenden Dunkelstromin dieser Schaltung auch die h�ochste Emp�ndlichkeit f�ur schwaches Licht erreicht.5.1.3 andere HalbleiterphotodetektorenMit Hilfe von Phototransistoren kann das Photosignal verst�arkt werden. Dabei wird einsolcher Transistor in Emitterschaltung betrieben. Der Basisanschluss bleibt o�en, inder gesperrten Basis{Kollektordiode werden durch das Licht zus�atzliche Leitungstr�agererzeugt, die in die Basis gelangen, und so einen Basis{Emitterstrom erzeugen, der danndurch die Stromverst�arkung � entsprechend verst�arkt wird. Wegen der Millerkapazit�atk�onnen so nur Frequenzen bis etwa 100 kHz erreicht werden.Avelanche Photodioden sind prinzipiell aufgebaut wie p.i.n. Dioden, erlauben aberso hohe SPerrspannungen, dass im Inneren Stossionisation und mit dem entstehendenLawinene�ekt eine Signalverst�arkung bis zu 104 m�oglich wird.Photoleiter oder Photowiderst�ande bestehen aus einem einfachen Halbleiter. Licht-einstrahlund �andert die Leitf�ahigkeit infolge Ladungstr�agererzeugung. Man misst dieWiderstands�anderung, die sehr grosse Faktoren annehmen kann. Z.B. variiert der Wi-derstand eines CdS Photowiderstandes von 100 Ohm (hell) bis 107 Ohm (dunkel). CdShat seine maximale Emp�ndlichkeit im sichtbaren Bereich, Silizium im infraroten Be-reich.Solarzellen sind Photodioden, die im Punkt C betrieben werden. Sie werden opti-miert f�ur maximalen Wirkungsgrad. Die Leerlaufspannung Ul betr�agt etwa 0.5 V (sinktbei h�oherer Temperatur), der Kurzschlusstrom Ik ist proportional zum einfallendenLicht. Bei einem bestimmten Arbeitspunkt Um; Im erh�alt man die maximale LeistungPm = UmIm, deren Verh�altnis zu UlIk heisst der F�ullfaktor, der etwa 0.75 betr�agt.Man muss darauf achten, dass die Solarzellen nicht durch Infrarotabsorbtion erw�armtwerden. Eine Kombination von Antire exionsschichten und geschickte angeordnete Re- ektoren an der Unterseite erh�ohen den Wirkungsgrad.

KAPITEL 5. SENSOREN 905.2 Anwendungen von LichtdetektorenPositionen werden meist mit durch Spiegel abgelenkte Lichtstrahlen gemessen, die durchFotodioden detektiert werden. Dabei wird entweder die Laufzeit des Signales (zum Bei-spiel Infratrotentfernungsmessung) oder die Position des Lichtstrahles durch mehereFotodioden ermittelt. Im folgenden exemplarisch ein paar Anwendungen dieser Prinzi-pien:5.2.1 F�ullstandsanzeigerLichtquelle Fotodiode
reflexionTotal
Eine Lichtquelle wird in einemGlask�orper mit geeigneter Geo-metrie totalre ektiert und von ei-ner Fotodiode detektiert. Steigtdie Fl�ussigkeit, so wird die To-talre exion aufgehoben, und dieFotodiode wird dunkel, was einenerh�ohten Fl�ussigkeitsspiegel si-gnalisiert.5.2.2 DrehwinkelDrehwinkelmesser bestehen aus Scheiben, die ein geeignetes Strichmuster aufgedruckthaben. Man misst das davon re ektierte Licht, und z�ahlt so die Streifen. Damit isteine Winkel�anderung messbar. Durch zwei Lichtquellen, die um eine halbe Phase desStrichmusters verschoben montiert sind, l�asst sich ausserdem die Drehrichtung detektie-ren. Will man die Drehposition absolut messen, kann man verschiedene Muster parallelverwenden, die verschiedenen Bits entsprechen.

KAPITEL 5. SENSOREN 915.2.3 NeigunswinkelmesserElektrolyt
R1 R2
von oben
Lichtquelle
Fotodioden
Das obere Bild zeigt ein gebogenes mit Elektro-lyt gef�ulltes R�ohrchen, wie eine Wasserwaage. Manmisst das Verh�altnis des Widerstandes R1 und R2,am besten mit einer Messbr�ucke. Man muss Wech-selspannung verwenden sonst gibts elektrochemi-sche Prozesse, die den Sensor zerst�oren.Das untere Bild zeigt eine verbesserte Version. DieLichtquelle wird durch die Luftblase auf die 4 Pho-todioden fokussiert. Neigt sich der Sensor, ver-schiebt sich der Lich eck und die 4 Fotodiodensehen eine ver�anderte relative Lichtst�arke, derenAuswertung Betrag und Richtung der Neigung er-geben kann.5.3 TemperaturMetalle haben einen positiven Temperaturkoe�zienten. Besonders gut linear sind Pla-tinwiderst�ande, deren WiderstandR = R0(1 + 3:91 � 10�3 � T ) (5.3)wobei die Temperatur in Celsius eingesetzt werden muss. Platintemperaturf�uhler wer-den zum Beispiel mit Pt100 bezeichnet, wobei die Zahl 100 den Widerstand in bei0� C angibt. Sie lassen sich im Bereich von -200 bis + 850 C einsetzen. Da die Wi-derstands�anderung klein ist, wird normalerweise eine Messbr�ucke in 4-Draht Methode(Kelvinschaltung) verwendet, da sonst die Temperaturabh�angigkeit der Messkabel dieMessung verf�alschen w�urde.Halbleiterwiderst�ande haben normalerweise negative Temperaturkoe�zienten,da entsprechend der Fermifunktion bei h�oheren Temperaturen mehr Leitungstr�agervorhanden sind. Man spricht von NTC. Ihr Widerstand variiert ziemlich stark, typisch2% pro Grad. PTC's haben einen positiven Temperaturkoe�zienten �ahnlicher Gr�osse.PTC's k�Onnen direkt zur Leistungsbegrenzung bei zu starker Erw�armung in die Strom-versorgung geschaltet werden.Thermoelemente beruhen auf dem Seebecke�ekt, der die temperaturabh�angigeSpannung (Thermospannung) am �Ubergang zweier verschiedener Metalle beschreibt.Typische Temperaturkoe�zienten sind sehr klein z.B. 50 �V/K f�ur Eisen{Konstantan.Sie eignen sich aber f�ur sehr hohe Temperaturen, z.B. Wolfram{Rhenium bis 2800� C.

KAPITEL 5. SENSOREN 92Fe
Cu
Cu-Ni
Fe
Cu
T1
2T
2T
Cu
Cu-Ni
Fe
Cu
T1
In der Praxis wird immer die Temperaturdi�erenz zwei-er �uberg�ange gemessen. Das obere Bild zeigt zwei gleicheEisen { Konstantan { F�uhler mit den Temperaturen T1und T2. Dabei sind die beiden �Uberg�ange zwischen demEisendraht und den Kupfermesskabeln genau auf dergleichen Temperatur zu halten! Das untere Bild zeigt ei-ne vereinfachte Anordnung, wo der �Ubergangsblock vomF�uhler zum Kupferkabel gleichzeitig die Referenztempe-raturmessung T2 darstellt.5.4 Druck und Kr�afte5.4.1 Piezoe�ektDer piezoelektrische E�ekt kommt durch die relative Verschiebung von ungleich gelade-nen Atomschichten innerhalb eines Kristalles zustande, die eine elektrische Spannungerzeugt. Der bekanntest Piezomesskristall ist Quartz (SiO2), aber auch k�unstliche Ke-ramikarten zeigen Piezoe�ekt.Piezodruckf�uhler gibt es in allen Formen, zum Beispiel auch als Unterlagscheiben.Die Messung stellt hohe Anforderung an den Eingangsverst�arker und das Anschlus-skabel. So bewirkt zum Beispiel bereits eine kleine Form�anderung des Kabels (ver-schieben) eine fehlerhafte Messung, indem die Form�anderung eine Kapazit�ats�anderungund darum eine Spannungs�anderung bewirkt! Der Eingangsverst�arker wird mit einemMOSFET versehen, um die Eingangsimpendanz hoch zu halten. Die Bandbreite wirdm�oglichst nur f�ur kleine Frequenzen ausgelegt, um nicht zu viel Rauschen zu bekommen.Eine Anwendung davon stellen die Flussmeeungen dar, die5.4.2 DehnungsmessstreifenEin Draht, den man in die L�ange zieht, wird nicht nur l�anger, sondern auch d�unner,sein Widerstand nimmt also zuR = � lA = � l2V ) dRR = S � dll = S � �E (5.4)

KAPITEL 5. SENSOREN 93und zwar o�enbar linear mit der Dehnung. Befestigt man einen solchen Draht in Ser-pentinen auf die Ober �ache des K�orpers, dessen Dehnverhalten uns interessiert, wirdder E�ekt verst�arkt, man spricht von einem Dehnungsmessstreifen. Sie werden auch alsKraftmesser eingesetzt.Eine spezielle Anwendung dazu sind Membrandruckmesser. Dabei werden die ei-nespannten Membranen an meherer Stellen mit Dehnungsmesstreifen versehen. Je nachPostion des Streifens entsteht bei h�Oherem Druck, also bei h�Oherer Auslenkung entwe-der eine Vergr�osserung oder eine Verkleinerung des Widerstandswertes. Gemessen wirdauch wieder mit einer Messbr�ucke.

Kapitel 6Elemente der Digitalelektronik6.1 Digitale Systeme und bitsDie Digitalelektronik befasst sich mit Nachrichten�ubertragung und -verarbeitung vonbin�aren Zust�anden, auch digitale Systeme S genannt. S ist eine endliche Menge vonElementen ai, die auch bit genannt werden (von englisch binary digit):S = fa1; a2; a3; : : : ang ai 2 f0; 1g (6.1)Ein System aus n Elementen heisst n { bit System. Die bits k�onnen also die Werte (auchZust�ande genannt) 1 oder 0 annehmen, manchmal verwendet man auch T und F f�urTrue und False.Einzelne Bits k�onnen aus analogen Signalen durch einen Schmitt{Trigger (sieheAbschnitt 4.2.2) direkt erzeugt werden.Um mit solchen Systemen praktisch arbeiten zu k�onnen, muss eine Abbildungs-vorschrift in eine technische Realisierung de�niert werden: Es gibt haupts�achlich vierverschiedene statische Normen, die solche Abbildungen de�nieren. Dabei ist jeweilsein Zustand L (Low) und H (High) bechrieben. Man spricht von positiver Logik, wenndem Zustand H der Wert T bzw. 1 zugeordnet ist, und dem Zustand L der Wert Fbzw. 0. Ist die Zurdnung umgekehrt spricht man von negativer Logik.Low HighTTL 0.2 V (< 0:8 V) 3.5 V (> 2:0V)CMOS 0 V (< 13Vb) Vb (> 23Vb) Vb = BetriebsspannungECL �1:7V (< �1:5V) �0:9V (> �1:1V)Schaltkontakt geschlossen o�en94

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 95Nat�urlich geh�oren zu diesen De�nitionen eigentlich auch die maximalen Innenwi-derst�ande oder minimalen Stromst�arken der Quellen, sowie die minimalen Innenwi-derst�ande der Verbraucher. CMOS{HC Ausg�ange k�onnen in der Regel TTL Bausteinetreiben, w�ahrend das umgekehrte (von TTL nach HC, auch von NMOS nach HC) miteinem 4.7k pullup Widerstand nach +5V m�oglich ist.Diese statischen Abbildungen erfordern f�ur jedes bit eine eigene Leitung auf demder Zustand dargestellt ist. �Andern sich die Daten im Laufe der Zeit, so werden siezeitlich hintereinander, also seriell dargestellt. Werden mehrere verschiedene bits aufeiner Leitung zeitlich hintereinander abgebildet, spricht man von einer multiplextenDarstellung. In diesen F�allen ist neben den Datenleitungen eine zus�atzliche Taktleitungoder clock n�otig, die mittels eines Rechtecksignales die Zeitpunkte de�niert, bei denendie Daten sicher ihre richtigen Werte L oder H angenommen haben:tholdsetupt
D
CkDie Abbildung zeigt ein Beispiel eines timing diagrams, wie es f�ur die Beschreibungaller Funktionalit�aten in der digitalen Elektronik verwendet wird. Die obere Zeile stellteines der Datensignale D dar, das jeweils im L oder H Zustand sein kann. Die untereZeile stellt das Taktsignal Ck dar, von dem es in der Regel eins pro System gibt. Es stelltebenfalls ein logisches Signal dar, das abwechslungsweise L und H ist. Man bezeichnetdie aktive Flanke mit einem Pfeil. Zwischen der setup time vor der aktiven Flanke undder hold time nach derselben sind die Werte auf den Datenleitungen stabil.Zeitliche Abfolgen von solchen Bitwerten stellen Signale im Sinne von Kapitel 3.1dar, ihre �Ubertragung unterliegt allen Regeln der analogen Elektronik. In der Praxiszeigt sich, dass vor allem bei gr�osseren Systemen die analogen Aspekte der digitalenElektronik eine wesentliche Rolle spielen: Rauschen, Pickup, �Ubersprechen (X-talk),Re exionen. Diese Dinge werden im Kapitel 8 diskutiert.

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 966.2 algebraische Grundlagen der LogikDie erw�ahnten Systeme S = fa1; a2; a3; : : : ang ; ai 2 f0; 1g bilden zusammen mit denOperationen AND (Konjunktion), OR (Disjunktion) und NOT (Negation) eine Alge-bra, die Boole'sche Algebra oder die Schaltalgebra genannt. Die Wertetabellen f�ur diedrei Operationen mit Eingangswerten a und b, sowie dem Resultatwert y lauten:ANDa b y0 0 00 1 01 0 01 1 1 ORa b y0 0 00 1 11 0 11 1 1 NOTa y0 11 0Man schreibt auch f�ur AND: y = ab oder y = a^b. F�ur OR: y = a+b oder y = a_b.F�ur NOT: y = �a oder y = :a.Das Einselement f�ur die OR Operation ist die 0, dasjenige f�ur die AND Operationdie 1: a+ 0 = a a � 1 = a. Anwendung: elektronischer Schalter f�ur Datensignale:&D y
S
D y
S
ORIm linken Fall werden die Daten druchgelassen, das heisst y = D, falls S = 1 ist,andernfalls ist y = 0. Im rechten Fall werden die Daten durchgelassen, falls S = 0 ist,andernfalls ist y = 1.Praktische Digitalbausteine, die die Grundfunktionen realisieren, heissenGatter odergates. Ein integrierter Baustein hat normalerweise mehrere Gatter im gleichen Geh�ause,oft sind es vier.Man beobachtet, dass durch Anwendung der Negation auf die eine der beiden Wer-tetabelle f�ur AND oder OR die jeweils andere Tabelle entsteht (Dualit�at).�a+�b = ab (6.2)Das bedeutet, dass die beiden Operationen durch Umkehrung der Logik (positive Logik,bzw. negative Logik) ineinander �ubergef�uhrt werden k�onnen. Von dieser M�oglichkeitmacht man in praktischen Schaltungen oft Gebrauch, da damit die verschiedenen gates

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 97optimal genutzt werden k�onnen, allerdings wird naturgem�ass die �Ubersichtlichkeit derSchaltung nicht gerade verbessert.Es gelten folgende Rechenregeln1. Assoziativgesetz: a(bc) = (ab)c a+ (b+ c) = (a+ b) + c2. Kommutativgesetz: ab = ba a+ b = b+ a3. Distributivgesetz: a(b+ c) = ab+ ac a+ (bc) = (a+ b)(a+ c)4. DeMorgan'sche Regel: ab = �a+�b a+ b = �a�bwobei Regel 4 die Dualit�at formuliert.Es k�onnen im ganzen 16 verschiedene Wertetabellen f�ur y = f(a; b) aufgestellt wer-den. Es k�onnen aber wie zur erwarten alle aus den drei Grundoprationen abgeleitetwerden. Vier dieser abgeleiteten Grundoperationen haben einige Bedeutung:NANDa b y0 0 10 1 11 0 11 1 0 NORa b y0 0 10 1 01 0 01 1 0 EXORa b y0 0 00 1 11 0 11 1 0 EXNORa b y0 0 10 1 01 0 01 1 1NAND und NOR sind die negierten von AND und OR. Sie haben darum eine speziel-le Bedeutung, weil mit jedem von ihnen alle (!) Operationen aufgebaut werden k�onnen.Das exklusive OR, EXOR, heisst auch Antivalenz y = (a 6= b) oder y = a � b. Dasinvertierte davon heisst EXNOR oder �Aquivalenz y = (a = b) oder y = a� b. Es giltim weiteren: a� b = a�b+ �ab a� b = ab+ �a�b (6.3)Die folgende Tabelle zeigt die wichtigsten Symbole der digitalen Schaltungstechnik.IEC ist die europ�aische Norm. Die mit veraltet bezeichnete Norm wird aber auch nochh�au�g verwendet.

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 98&
1
Buffer
Inverter
AND
NAND
OR
alt IEC USA
EXOR
Schmitt Trigger
&
=1
ST
1
Das Aufstellen der Gleichung aus der Wahrheitstabelle und die Entwicklung derSchaltung mit Hilfe der diskjunktiven Normalform soll an einem Beispiel demonstriertwerden: Man stelle die Zahl der aktiven Bits von im ganzen 3 Bits a; b; c als eineBin�arzahl y0; y1 dar (eine Aufgabe, die sich zum Beispiel bei einem Triggersystem derTeilchenphysik h�au�g stellt). Die Wahrheitstabelle lautet:a b c y0 y10 0 0 0 00 0 1 1 00 1 0 1 01 0 0 1 00 1 1 0 11 0 1 0 11 1 0 0 11 1 1 1 1 Die vollst�andige logische Beschreibung derTabelle erfolgt nun in der disjunktive Nor-malform. Diese besteht aus einem grossenOR aller Zeilen, die eine 1 als Resultat ha-ben. Jede Zeile wird dabei als Konjunktion(AND) aller Eing�ange geschrieben, also Zeilezwei lautet zum Beispiel y0 = �a�bc.Die vollst�andige disjunktive Normalform (auch sum of products SOP genannt) unsererTabelle lautet demnach: y0 = �a�bc+ �ab�c+ a�b�c+ abc (6.4)y1 = �abc+ a�bc+ ab�c+ abc (6.5)Durch Anwendung der Rechenregeln erh�alt man darausy0 = a� (b� c) (6.6)y1 = a(b� c) + bc (6.7)

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 99&
&OR
=1=1
a
bc
y
y0
1
Wir brauchen also zwei EXOR, zweiAND und ein OR um dieses Schalt-netz zu realisieren, so wie es dernebenstehende Schaltplan zeigt. Esgibt nat�urlich mehrere L�osungen zudem Problem, die Wahl h�angt vonvielen Details ab.Alternativ dazu besteht die konjunktive Normalform (oder product of sums POS)aus der zur disjunktiven Form dualen Logik: Ein grosses AND wird aus den Zeilenmit den 0 als Resultat gebildet, wobei jede Zeile als OR aus den invertierten Wertengeschrieben wird:y0 = (�a+�b+ c) � (�a+ b+ �c) � (a+ �b+ �c) � (a+ b+ c) (6.8)y1 = (�a+ b+ c) � (a+�b+ c) � (a+ b+ �c) � (a+ b+ c) (6.9)Je nachdem ob die Resultatspalte mehr nullen oder mehr einsen enth�alt w�ahlt mandie konjunktive oder die disjunktive Normalform zur Beschreibung der Schaltung. (Inunserem Beispiel sind es zuf�allig gleichviele!)Diese Schaltungsentwicklung (\Synthese") kann nat�urlich mit Hilfe von Computer-programmen (\hardware description languages") automatisiert werden (siehe Abschnitt7.4). Im weiteren gibt es programmierbare Funktionsspeicher (PLD's) die direkt die dis-junktive oder konjunktive Normalform programmierbar implementiert haben. 11.1.996.3 Innerer Aufbau von digitalen Bausteinen6.3.1 Betriebsparameter und Auswahlkriterien, Bezeichnun-genVerschiedene Aufbauten der Grundschaltungen (Gatter) OR, AND und NOT aus kon-kreten elektronischen Bauteilen f�uhren zu den verschiedenen Schaltungsfamilien. F�urdie Wahl der Familie sind unter anderen folgende technische Paramter relevant:� De�nition der Darstellung der Zust�ande (siehe 6.1) und ihr St�orabstand.� Die maximalen Eingangs- und die minimalen Ausgangsstr�ome werden als fanoutangegeben, das heisst die Zahl der Eing�ange derselben Familie, die von einemeinzigen Ausgang getrieben werden k�onnen.
KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 100� Anstiegszeit und Abfallzeit (risetime, falltime) der Ausgangssignale bei einer �Anderungdes logischen Ausgangszustandes. Dieser Wert ist stark von der Lastkapazit�atabh�angig, er wird in der Regel bei einer Last von einer bestimmten Zahl vonEing�angen von anderen Bausteinen derselben Familie angegeben. Beachte aber,dass die Lastkapazit�at auch von der Leitungsl�ange abh�angt, lange Leitungen (auchauf p.c.b.'s) brauchen deshalb immer wieder bu�ers.� Verz�ogerungszeit, propagation delay: die Zeit die es braucht von der �Anderung desEingangszustandes bis sich der Ausgangszustand �andert. Die propagation delaymuss bei mehreren Ein- und Ausg�angen im Prinzip f�ur jede Kombination von Ein-und Ausgang separat angegeben werden.Ausserdemm�ussen organisatorische Aspekte (Verf�ugbarkeit, Service- und Austausch-m�oglichkeiten, Preis usw.) sowie weitere technische Eigenschaften (Zuverl�assigkeit, Be-triebsspannungen, Stromverbrauch, Montagetechnik usw.) ber�ucksichtigt werden.Logikbausteine werden mit dem Code FF-74TTTnnnPPP bezeichnet. Dabei bedeu-tet � FF das Herstellerk�urzel� TTT die Schaltungsfamilie� nnn eine Zahl, die die eingebaute Logik de�niert� PPP Geh�ause und Betriebstemperaturbereich (military: �25 : : : + 125� C, indu-strial: �25 : : : + 85� C, commercial: 0 : : :+ 70� C)Beispiel: SN74ALS00N: Hersteller Texas Instruments, Familie advanced low powerschottki, 00: vier unabh�angige NAND gates, Plastikgeh�ause im DIL-14 Format.Die Details der Kodierung sind herstellerabh�angig, eine etwas ausf�uhrlichere aberauch unvollst�andige Beschreibung �ndet sich in [N�uhr98] Seite 3516. Eine ziemlichvollst�andige Liste der Hersteller Pre�xes FF �ndet man in [Horo97], Seite 1069. Hatman damit den Hersteller identi�ziert, schaut man am besten in den Unterlagen desentsprechenden Herstellers (auf dem internet) nach, wie dieser genau die Kodierungmacht. Gl�ucklicherweise sind wenigstens die Logik Nummern nnn einigermassen ein-heitlich verwendet.

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 1016.3.2 RelaisEin Relais besteht aus einem Eisenkern, der von einem oder mehreren Spulen (logischenEing�angen) magnetisiert wird. Das Magnetfeld bet�atigt dann einen oder mehrere Schal-ter, die damit ihren Zustand von o�en auf geschlossen (oder umgekehrt: \Auskontakt")�andern. AND und OR Schaltungen bestehen aus zwei Relais deren Schaltkontakte inSerie oder parallel geschaltet werden. NOT Schaltungen bestehen aus einem Relais miteinem Auskontakt.Relaisschaltungen sind langsam, st�oranf�allig und haben einen immensen Strom- undPlatzbedarf. Ihr entscheidender Vorteil besteht darin, dass Eingangs- und Ausgangs-stromkreis galvanisch v�ollig getrennt sind, sie werden deshalb als Signal�ubertrager aufhochgespannte oder variable Potentiale und manchmal f�ur das Schalten grosser Str�omeimmer noch verwendet.6.3.3 Dioden und TransistorenMit Hilfe nur von Dioden und Widerst�anden k�onnen AND und OR Schaltungen reali-siert werden, f�ur NOT braucht es mindestens einen Transistor.y y
ya
b
Ub
a
b
AND OR
a
UbNOTDiese Schaltungen werden vorallem dazu verwendet, an bestehenden Systemen auf ein-fache Art noch zus�atzliche einzelne Verkn�upfungen einzuf�uhren. Sie sind allerdings et-was langsam (Anstiegszeit RC, R aus der Schaltung, C die Lastkapazit�at) oder beikleindimensioniertem R ziehen sie von den Ausg�angen eine grosse Last.Es k�onnen im Prinzip beliebig viele Dioden am Eingang der UND Schaltung verwen-det werden. Man spricht in diesem Zusammenhang vom wired OR (eine aktive Diodegen�ugt, um den Ausgang auf Low zu bringen: invertierte Logik). Dieses Prinzip eignetsich besonders, um viele Eing�ange, die an gegraphisch verteilten Orten sitzen, mitein-ander zu verkn�upfen.

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 1026.3.4 TTLDie TTL (Transistor { Transistor { Logik) Technik besteht aus Grundschlatungen vonmehreren Transistoren. Es gibt verschiedeneUnterfamilien, die sich durch die Details derDimensionierung der Art- und Schaltung der verwendeten Transistoren unterscheiden.y
a
b
Ub
20k 8k 120
3k
NAND
Das Bild zeigt die Grundschaltung eines LS-TTL NAND { Gatters 7400. LS steht f�urLow Power (relativ hochohmig dimensionierte Widerst�ande) und Schottki. Letzteresbezieht sich auf einen Schottkikontakt (Halbleiter Metall�ubergang) zwischen Basis undKollektor der verwendeten Transistoren (S-f�ormiges Symbol). Damit wird verhindert,dass die Transistoren durch negative BC Spannung in die S�attigung gehen, die Ge-schwindigkeit der Schaltungen wird damit stark erh�oht.Typische Verlustleistung eines LS Gatters betr�agt 2 mW, propagation delay 15 ns.In den Eingang iessen im H Zustand max. 20 �A, aus dem L Zustand max. 400�A. Die Ausg�ange k�onnen mindestens 8 mA im L und 400 �A im H Zustand treiben.Die ergibt ein garantiertes fanout von 20. Dank den vergleichbaren Eigenschaften vonLeuchtdioden ergibt sich in der Praxis, dass man mit TTL Ausg�angen direkt LED's(bevorzugt gr�une: Uf � 2:2V ) gegen Masse ohne zus�atzliche Vorwiderst�ande betreibenkann, was oft sehr hilfreich ist.Die ALS (advanced Low Power Schottki) { Typen erlauben durch zus�atzliche Schal-tungstricks eine propagation delay von 5 ns, ohne den Stromverbrauch zu erh�ohen.AS (advanced Schottki) haben niedriger dimensionierte Widerst�ande und sind deshalbschneller: propagation delay 1 bis 2 ns, Stromverbrauch 10 mW.Beachte aber, dass je schneller die Schaltkreise werden, umso h�oher ist die Ge-fahr des �Ubersprechens (X-talk). Auch k�onnen die im Schaltzeitpunkt erh�ohten Str�omewegen der Zuleitungsinduktivit�at die Spannungsversorgung kurzzeitig reduzieren. Umdiesen E�ekt klein zu halten, muss m�oglichst nahe an jedem digitalen Baustein einSt�utzkondensator zwischen Masse und Betriebsspannung geschaltet werden: 10 bis 100

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 103nF Keramik pro Chip. Trotzdem begrenzen diese Art von Problemen den Einsatz vonTTL bei sehr grossen Schaltfrequenzen.6.3.5 Open Collector und TristateUm die Verkn�upfung sehr vieler Signale in einem grossen OR oder AND mittels \wiredOR" zu vereinfachen, werden viele der Schaltkreise auch mit open collector angeboten(Abk�urzung: OC, Symbol siehe im Beispiel unten). Dabei werden am standard Schalt-kreis einfach die beiden oberen Darlington Transistoren weggelassen. Zum Beispiel hatdas vierfach NAND mit open collector die Nummer 7401. Damit erkauft man sich aller-dings den Nachteil, dass wie in der Diodenschaltung oben beschrieben, die Anstiegszeitdes Signales relativ langsam wird.C
R
bU
1
Anwendung: Signalverz�ogerungmittels eines open Collectors undeines Schmitt { Triggers. Dieabfallende Flanke wird um etwa0:5 �RC verz�ogert.Eine weitere Anwendung der open collector Schaltung sind interfaces zu Systemenmit anderen Spannungsversorgungen: Der Pull{up Widerstand wird einfach an die neueSpannung geh�angt, und schon ist das Interface fertig. Beachte aber VCE max.Bei der tristate Ausgangsschaltung werden die oberen und der untere Transistorin der Ausgangsstufe logisch separat angesteuert, sodass neben den bereits bekanntenAusgangszust�anden L und H es auch m�oglich ist, mittels eines separaten Eingangs\Enable" alle Transistoren zu sperren, und somit einen hochohmigen Zustand Z zuerreichen.Mit Tristate Ausg�angen l�asst sich somit ein echter Busbetrieb realisieren, das heisstdie gleiche Signalleitung kann von wahlweise von verschiedenen Gattern betrieben wer-den. Damit wird es erm�oglicht, mehrere Systeme am gleichen Kabel zu betreiben, vor-ausgesetzt die Enable Leitungen der verschiedenen Schlatkreise werden auf koordinierteArt betrieben. 13.1.99Ein spezi�sche Anwendung der Tristate Technik sind die sogenannten Bustranscei-vers. Sie dienen als Leitungsverst�arker sowie als \Tor" eines Ger�ates zu einer Busleitung,falls Daten in beide Richtungen �ubertragen werden sollen.

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 1041
2
G(19)
(1)
(8)
(18)
(17)
(16)
(15)
(14)
(13)
(12)
(11)(9)
(7)
(6)
(5)
(4)
(3)
(2)
G
DIR
A1
A2
A8
A7
A6
A5
A4
A3
B2
B8
B7
B6
B5
B4
B3
B1
EN1EN2
Die nebenstehende Abbildung zeigt einen 8-fachnichinvertierenden Bustranceiver (Typ '645). Dasauf der Spitze stehende Dreieck steht f�ur denTristate Ausgang, das liegende Dreieck f�ur denVerst�arker, da der '645 einen relativ hohen Aus-gangsstrom liefern (typisch 24 mA) und damit einfanout von 60 treiben kann, sodass er lange Lei-tungen mit hohen Kapazit�aten bzw. vielen An-schl�ussen bedienen kann. Der DIR Eingang be-stimmt die Richtung der �Ubertragung, mit �G las-sen sich alle Ein- und Ausg�ange ausschalten.Die Zahlen in Klammern geben die Anschlussnummer (pin) am Geh�ause an (in derRegel im Gegenuhrzeigersinn).6.3.6 ECLDie ECL Technik wurde speziell mit dem Ziel gescha�en, den Stromverbrauch un-abh�anig vom Schaltzustand zu halten, und damit die durch Schaltstr�ome ausgel�osten\spikes" auf der Strom- und Massezuf�uhrung zu vermeiden.-1.3V
-5.2V
ab y
220220
780
Das nebenstehende Bild zeigt dieGrundschaltung eines NOR (y = a+ b)in emittergekoppelte Logik (ECL) der10k Serie. Es handelt sich um einen Dif-ferenzverst�arker, dessen Emitter- undKollektorwiderst�ande so dimensioniertsind, dass die Transistoren nicht inS�attigung gehen k�onnen.Der Ausgang kann direkt an weitere Gatter angeschlossen werden. Bleibt er o�en,muss er allerdings mit 520 nach -5.2V abgeschlossen werden, sonst sieht man keinSignal!ECL Schaltkreise sind sehr schnell, man kann unter 1 ns propagation delay (ECL100k) erreichen, was mit einem Stromverbrauch von 40 mW pro gate erkauft wird.Gr�ossere ECL Schaltungen brauchen normalerweise Wasserk�uhlung. Da die Summeder Strom �usse im ECL gate im wesentlichen unabh�angig von dem Schaltzustand ist,erlaubt ECL einen sehr st�orsicheren Betrieb auch bei ganz hohen Schaltfrequenzen. Diekleinen Spannungsamplituden erlauben eine schnelleres Umladen der Streukapazit�aten,

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 105was ebenfalls zu einer Geschwindigkeitsverbesserung f�uhrt. Die neueste Generation derECL Familie ist die ECLinPS{Lite (PS steht f�ur picosekunden), die propagation delayvon 220 ps und Schaltfrequenzen bis zu 2.8 GHz erlaubt. Das erkauft man mit einerVerlusteistung von 73 mW und Kosten von 32$ pro gate.a
b
c
d=1 =1
-5.2V
y=a+b+c+d Der o�enen Emitterausgang erm�oglicht es,leicht \wired OR" Verkn�upfungen zu ma-chen. Beachte das Symbol f�ur den o�enenEmitterausgang.In der Kern- und Teilchenphysik wird der sogenannte NIM - Standard verwendet.Dabei handelt es sich im wesentlichen um ECL Technik, die Ausg�ange f�ur Kabelan-schl�usse sind dabei mit einem zus�atzlichen Ausgangstreiber versehen, sodass sie in derLage sind 50 Kabel gegen Masse zu treiben. Der L Zustand wird 0 V, der H Zustand-0.8 V.6.3.7 CMOSa
b
y
VDD Complementary MOS Technik (CMOS) stellt heute den mitgrossem Abstand �uberwiegendsten Teil aller digitaler Elektro-nik. Das Bild zeigt ein standard NAND gate mit 4 enhance-ment (selbstsperrenden) MOSFETs. Im Ruhezustand iesstparaktisch kein Strom (P < 10�W). Daf�ur sind allerdingsdie Umladungsstr�ome im Schaltmoment relativ gross, sodasssich eine im wesentlichen lineare Frequenzabh�angigkeit derVerlustleistung ergibt. Typischerweise bei einigen MHz wirdder Stromverbrauch gr�osser als der von LS{TTL. Die Ver-sorgungsspannung VDD liegt im Bereich 2 : : : 5:5 V (VHC),3 : : : 18 V (4000B Serie) oder 4:5 : : : 5:5 V (HCT).Die progagation delays sind sehr unterschiedlich, die schnellsten (AC) erreichen un-ter 3 ns, haben aber eine sehr schlechte X-talk Charakteristik innerhalb des gleichenchips (substrate bouncing), sodass sie nur inspeziellen Anwendungen verwendet werdensollten. HC haben typisch 10 ns und funktionieren sehr stabil, sodass sie f�ur die mei-sten Anwendungen die gute Wahl sind. Die Version HCT ist wie HC, hat aber TTL {kompatible Eingangscharakteristik. Die neueste Gerneration dieser Familie ist LCX, diebei 3 V Speisung nur noch halb so viel Power zieht (0.3 mW bei 1 MHz) wie HC undtrotzdem bis zu Frequenzen von 200 MHz l�auft (3.5ns propagation delay). Besondersangenehm ist, dass die Ein- und Ausg�ange trotz 3V Speisung mit 5V betrieben wer-
KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 106den k�onnen. LCX wurde von den Firmen Motorola, Toshiba und National gemeinsamspezi�ziert.F�ur sehr hochintegrierte Schaltungen wird die NMOS Technik verwendet, die nur ausNMOS FETs besteht, und noch einfachere Schaltungen und damit h�ohere Logikdichteerlaubt.Eine wesentliche Begrenzung der Schaltgeschwindigkeiten stellen die umzuladen-den Streukapazit�aten dar. Da Leitungen innerhalb eines chips um Gr�ossenordnungenk�urzer sind, als auf einem p.c.b., k�onnen innerhalb von chips noch wesentlich h�ohereGeschwindigkeiten (viele hundert MHz) erreicht werden. Darauf gr�undet unter anderemder rasante Fortschritt in der Geschwindigkeit von Mikroprozessoren (80X86).Die open collector Versionen (sollten eigentlich open drain heissen) gibt es teilweiseebenfalls, zum Beispiel der MC74HC03, ein 4{fach 2 input NAND mit open collectorAusg�angen von Motorola. Ebenso die Tristate Versionen, der CD74HC640 ist ein tristate8{facher invertierender Bustransceiver von Harris/RCA.Einige Grundreglen bei der Verwendung von CMOS Bauteilen m�ussen beachtet wer-den:1. Es m�ussen alle unben�utzten Eing�ange auf de�niertes Potential angeschlossen wer-den, auch solche von nicht ben�utzten Logikteilen, da diese bereits mit minimalerLadung am Eingang umschalten k�onnen.2. Alle Eing�ange haben Schutzdioden auf Masse und VDD und sind deshalb nicht sehremp�ndlich auf statische Elektrizit�at. F�uhrt man aber zu grosse Spannungen andie Eing�ange (statisch oder �Uberschwingen), k�onnen diese Dioden durchbrennen.Es kann sich auch ein sogenanntes Latchup ergeben (Der NFET und der PFETam Eingang werden gleichzeitig leitend ) Kruzschluss). Um das zu verhindern,sollten bei Eing�angen, die �uber Stecker oder von l�angeren Leitungen kommen,immer 10k Widerst�ande in Serie geschaltet werden. Bei den HC Typen ist einSeriewiderstand von 120 Ohm eingebaut, der die Latchup Wahrscheinlichkeit starkreduziert.3. Die erw�ahnten Schutzdioden k�onnen dazu f�uhren, dass eine logische Schaltungscheinbar funktioniert, ohne dass eine Speisspannung an den IC's angeschlossenist, da Strom von den logischen Eing�angen �uber die Schutzdioden zu den Speis-anschl�ussen iesst. Das ist aber nat�urlich kein zuverl�assiger Betrieb!4. CMOS ziehen viel Strom beim Schalten, man muss also hier auch wie bei TTLtypisch 100 nF Keramik pro Chip vorsehen, um die Speisung zu stabilisieren.

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 1075. Die Signalqualit�at wird umso schlechter je l�anger die Leitung und je mehr Eing�angean einen Ausgang angeschlossen werden. F�ur schnelle Schaltungen muss deshlabdie optimale Zahl von zus�atzlichen Signaltreibern (die nat�urlich selbst eine gewissepropagation delay haben) bestimmt werden.6. Bei komplexeren Aufbauten wird die Spannungs- und Massef�uhrung zum Killerdes Systems. Ohne je eine durchgehenden Masse- und VDD Schicht im multilayerp.c.b. zu spendieren besteht keine Chance f�ur einen zuverl�assigen Betrieb!

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 1086.3.8 Vergleich der Logikfamilien und {Generationen(siehe http://mot-sps.com/logic/which is best.html)Motorola Logic Families, Which Is Best for You?
By Gary Tharalson, Motorola, Inc., Mesa, AZ
Typical Commercial Parameter (0°C to +70°C)
Logic Families
TTL CMOS ECL
LS ALS ABT FAST MG HC FACT LVC LCX 10H 100KECL
inPS(3)
E-Lite
SpeedGate Prop Delay (ns)
Flip-Flop Toggle Rate (MHz)
Output Edge Rate (ns)
9
33
6
7
45
3
2.7
200
3
3
125
2
65
4
50
8
45
4
5
160
2
3.3
200
3.7
3.5
200
3.6
1
330
1
0.75
400
0.7
0.33
1,000
0.5
0.22
2800
0.25
Power Consumption Per Gate (mW)Quiescent
Operating (1 MHz)5
5
1.2
1.2
0.005
1.0
12.5
12.5
0.0006
0.04
0.003
0.6
0.0001
0.6
0.003
0.8
1E-04
0.3
25
25
50
50
25
25
73
73
Supply Voltage (V) +4.5to
+5.5
+4.5to
+5.5
+4.5to
+5.5
+4.5to
+5.5
+3to
+18
+2to+6
+1.2to
+3.6
+2to
+3.6
+2to+6
-4.5to
-5.5
-4.2to
-4.8
-4.2to
-5.5
-4.2 to
-5.5
Output Drive (mA) 8 8 32/64 20 1 4 24 24 24 50 ohmload
50 ohmload
50 ohmload
50 ohmload
5V TolerantInputsOutputs
N/AN/A
N/AN/A
N/AN/A
N/AN/A
N/AN/A
N/AN/A
N/AN/A
YesNo
YesYes
N/AN/A
N/AN/A
N/AN/A
N/AN/A
DC Noise Margin (1)High Input %
Low Input %
22
10
22
10
22
10
22
10
30
30
30
30
30
30
30
30
30
30
27
31
41
30
28/41
31/31
33
33
Packaging(4)DIPSOLCCSSOPTSSOP
YesYesNoNoNo
YesYesYesYesNo
YesYesNoYesNo
YesYesYesYesNo
YesYesNoNoYes
YesYesNoYesYes
YesYesYesYesYes
NoYesNoYesYes
NoYesNoYesYes
YesNoYesNoNo
YesNoNoNoNo
NoNoYesNoNo
NoYesNoNoNo
Functional devices Types 190 210 50 110 125 103 80 35 27(2) 64 44 48 40
Relative 1-25 Gate PriceU.S. $
.90 1.00 1.60 1.00 .90 .90 1.50 1.80 1.80 2.00 10.00 28.00 32.00
(1)Typical noise margin expressed as a percentage of typical output voltage swing.(2)Announced plans for Motorola offering.(3)ECLinPS is available in both 10H and 100K compatible versions.(4)A "Yes" may not include all devices within a family.
Manufacturers Data Books Referenced:Motorola, DL121, DL122, DL129, DL131, DL138, DL140, BR1339Texas Instruments, SDAD001BPhillips Semiconductor, IC23, IC24National Semiconductor, F100K
Copyright 1994,1997 Motorola, Inc. All rights reserved.Please Read Our Copyright and Disclaimer Notice
18.1.99

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 1096.4 Beispiele von digitalen Grundschaltungen6.4.1 Halbaddierer und VolladdiererF�uhrt man sich die Wahrheitstafel der Addition von 2 bin�aren Stellen zweier Zahlen aund b vor Augen, sieht man s = a� b c = ab (6.10)wobei s die Summe und c das carry (�Ubertrag) darstellt. Eine Schaltung, die dieseLogik enth�alt heisst ein Halbaddierer, da sie nicht in der Lage ist, allf�allige carries vonder vorhergehenden Stelle zu �ubernehmen.=1
&
=1
&
1
c
a
b
p
g
s
i+1c
i
F�ur einen Volladdierer (Fullad-der) lauten die Gleichungens = a� b� cici+1 = ab+ ci(a� b)(ci das carry aus der vorherge-henden Addition) und brauchtdemnach schon eine etwaskompliziertere Logik.Das Zwischenresultat g := ab heisst generate, p := a� b heisst propagate.Um zwei mehrstellige Dualzahlen addieren zu k�onnen, braucht man f�ur jede Stelleeinen Volladdierer. Der Aufwand an gates geht proportional zu den Anzahl Stellen, istalso kein Problem. Hingegen geht die gesamte Verz�ogerungszeit wegen den durchzu-schlaufenden Carries ebenfalls mit den Anzahl Stellen linear hoch, man spricht vomseriellem �Ubertrag oder von ripple carry.Die Situation l�asst sich verbessern, indem man in die Gleichung f�ur das carryci+1 = gi + pici alle vorhergehenden Zwischenresultate einsetzt, und auf die disjunk-tive Normalform bringt, man erh�alt dann Ausdr�ucke der Formci+1 = iXk=1 ( iYl=k pl) � gk�1 (6.11)Diese Summe von Produkten l�asst sich also immer mit zwei gate propagation delaysdarstellen. Dazu kommt noch ein je ein delay von der Generation der pi und gi, sowiedie EXOR am Ausgang f�ur die Resultatbildung, sodass eine propagation delay von 4gates unabh�angig von der Anzahl Stellen entsteht. Man spricht vom carry look ahead.

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 110Ein typischer 4 bit full adder mit carry look ahead ist der CD74HC283, der es auf eineAddierzeit von ca. 30 ns bringt.In der Teilchenphysik hat man oft das Problem, dass man f�ur den Trigger einesExperimentes (schnelle Entscheidung, ob ein Ereignis gut oder schlecht ist) sehr vieleeinzelne Messkan�ale (z.B. von einem Calorimeter) addieren muss. Die o�ensichtlicheL�osung ist eine Baumstruktur aus einzelnen Addierer zu bauen. F�ur die korrekte Ad-dierung aller m�oglichen Werte muss man bei jeder Stufe des Baumes eine Stelle mehrvorsehen (!) Will man zum Beispiel 512 Acht{Bit Zahlen addieren, so braucht man neunAddierstufen, die erste noch f�ur 8 bit, die letzte f�ur 17 bit. Da jedoch in diesen Expe-rimenten meistens nur wenige Kan�ale von null verschiedene Werte haben, l�asst mandas carry oft weg, implementiert nur 8 bit adders und anstelle des carry ein over ow {Signal, das ein einfaches OR aller carries ist.Die Subtraktion zweier Zahlen l�asst sich gleich wie eine Addition im obigen Sinnebehandeln, wenn man f�ur negative Zahle die Zweierkomplement (Two's complement) {Darstellung w�ahlt. Das Zweierkomplement einer Dualzahl erh�alt man durch Inversionaller Stellen und anschliessender Addition von 1. In einer Achtbit Darstellung wird -1= 11111111 und -16 = 11110000. Bei h�oherer Stellenzahl der Darstellung m�ussen alsobei negativen Zahlen weitere einsen vorangestellt werden (sign extension). Das ist oftder Fall beim Einlesen von Resultaten eines ADC, da letztere oft wesentlich wenigerBits haben als der verarbeitende Computer!F�ur oating point Zahlen werden Mantisse und Exponent seperat dargestellt und be-arbeitet. IEEE hat die Details dieser Darstellung normiert. Dazu sei auf das Computer{hardware Praktikum von Prof. V. Lindenstruth verwiesen.6.4.2 Flip{FlopsAlle bisherigen logischen Schaltungen waren Schaltnetze (combinatorial logics), dasheisst ihr Ausgangszustand h�angt nur von den am Eingang anliegenden Signalen ab,sofern man die maximale propagation delay abgewartet hat.Von einem Schaltwerk (sequential logics) spricht man, wenn die Ausgangszust�andeausserdem auch von der Vorgeschichte abh�angen, man braucht also Speicher. Stelltman solche Speicher aus logischen Gattern her, spricht man vom Flip-Flop. (ALter-nativ kann man auch andere physikalische E�ekte heranziehen, zum Beispiel geladeneKondensatoren ) dynamisches RAM).

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 111RS Flip{FlopR
SQ
Q
&
&
Den einfachsten Speicher erh�alt man durch nebenstehendeSchaltung. Die dazugeh�orige Wahrheitstabelle lautetS R Q Q0 0 Q�1 Q�11 0 1 00 1 0 11 1 1 1Die erste Zeile entspricht dem Speicherzustand. Der gespeicherte Wert h�angt davon ab,ob unmittelbar vor dem Eintre�en des Speicherzustandes die Werte von Zeile 2 oder 3vorhanden waren. Zeile 4 f�uhrt nicht zu einem eindeutigen Speicherzustand.&
&
+
+
Anwendung: Entprellen eines Schalter. Be-achte die Widerst�ande! 20.1.99Transparentes D{LatchDie viel h�au�gere Anforderung an einen Speicherbaustein besteht darin, den Zustandeine Leitung D zu einem Zeitpunkt einzufrieren, der durch die Flanke einer TaktleitungC (Clock) bestimmt ist.&
&
1
&
&C
D Q
C
D QDie Schaltung heisst transparentes Latch (manchmal auch transparentes D{Flip op

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 112oder einfach D{Latch genannt). Solange das Clock{Signal anliegt widerspiegelt der Aus-gang den Eingang. Geht das Clock{Signal auf L, stellt der Ausgang den unmittelbardavor bestehenden Zustand von D dar. Das rechte Bild zeigt das Symbol f�ur ein D{Latch.Bei diesen Schaltungen sind die fr�uher besprochenen Setup- und Holdzeiten nat�urlichwichtig (siehe Abschnitt 6.1). Beispiel Datenblatt MC74VHC573.Das Master{Slave PrinzipD Q
C
D Q
C
1
d
c
q
q
d
c
Setzt man zwei D{Latches in Serie hintereinan-der, wobei das zweite Latch die invertierte clockbekommt, erh�alt man ein master{slave Flip op.Liegt die clock auf H, ist das hintere Latch trans-parent, das vordere speichert. Wechselt die clockauf L, friert das hintere Latch ein und das vorderewird transparent und zeigt den gespeicherten Zu-stand. Geht die clock wieder auf H, speichert dasvordere Latch den alten Zustand, das hintere wirdnun transparent.Der Clock{�Ubergang von L auf H bleibt also ohne Auswirkung auf den Ausgangszu-stand, w�ahrend beim �Ubergang von H auf L die Eingangsdaten gespeichert, und amAusgang dargestellt werden.D
R
Q
C
Das nebenstehende Bild zeigt das Symbol f�ur ein Master { Sla-ve D{Fli op, oft auch edge triggered D-Flip op oder einfach (et-was verwirrend) nur D-Flip op genannt. Mit dem Dreieck wird dieFlankensensitivit�at ausgedr�uckt. Oft ist ein weiterer ReseteingangR vorhanden, der den Speicherzustand l�oscht, was zum Beipsiel beider Initialisierung relevant ist.ToggleD Q
CQ
Das nebenstehende Bild zeigt ein toggle, das aus einemedge{triggered D{Flip op aufgebaut ist. Bei jeder posi-tiven Clock anke �andert sich der Zustand des Eingangsin sein Invertiertes. Man spricht deshalb auch von ei-ner divide{by{2 Schaltung, oder von einem einstelligenZ�ahler.

KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 113Steuerbare Toggles haben noch einen Steuereingang T , der Ausgang wird nur umge-schaltet, wenn T = H ist.6.4.3 Z�ahlerEinen asynchroner Z�ahler (ripple counter) erh�alt man durch einfache Serieschaltung vonungesteuerten Toggles und zwar soviele, wie bits zu z�ahlen sind. Ist die resultierendeZahl auszuwerten, besteht in dieser Schaltung der Nachteil, dass die Ausgangswertenicht gleichzeitig ankommen, sondern bei jeder Stelle die Laufzeit tT durch ein Toggledazu zu z�ahlen ist. Das letzte Bit wird erst mit einer Verz�ogerung von n � tT seinenkorrekten Wert annehmen. F�ur divide{by{2n Schaltungen ist das allerdings irrelevant,und da kommt diese Methode vor allem f�ur sehr viele bits zum Zug.Beispiel: Der CD74HC4020 ist ein 14 stu�ger asynchroner Bin�arz�ahler mit gemein-samem Reset und l�auft bis etwa 50 MHz. Die Propagation delay von einer Stufe betr�agtaber etwa 6 ns, bei hohen Frequenzen zeigen die einzelnen Stellen also gar nie einengemeinsamen korrekten Wert.Legt man Wert auf korrekte, parallel zu verarbeitende Resultate, dann muss maneinen synchronen Z�ahler w�ahlen. Dabei werden gesteuerte Toggles verwendet, derenTakteing�ange alle miteinander verbunden sind. Die Bedingung f�ur das Z�ahlen einerbestimmten Zelle wird durch ein Schaltnetz aus den Qi gebildet und auf die entspre-chenden Steuereing�ange gegeben. Bei sehr vielen Stellen werden diese Netze allerdingskompliziert. Der CD74HC161 ist ein 4-Bit Bin�arz�ahler mit Reset Eingang, der mit ei-ner beliebigen Zahl vorgeladen werden kann (presettable Counter). Er liefert auch einenCarry out und besitzt zwei enable Eing�ange, sodass mehrere '161 kaskadiert werdenk�onnen.4-bit BCD-Z�ahler (binary coded decimal, auch 8421 Code) z�ahlen nur bis 9 (statt24 � 1 = 15) und beginnen dann wieder bei 0, entsprechen also einer Dezimalstelle. Siesind f�ur direkte Anzeigen geeignet. Beispiel HC160.Die Serie HC190 bis HC194 hat zus�atzlich einen Steuereingang f�ur Vorw�arts{ R�uck-w�artsz�ahlung (up/down counter).6.4.4 SchieberegisterSetzt man mehrere edge{triggered D-Flip op in Serie (je Q mit D verbinden, aber f�uralle eine gemeinsame clock) erh�alt man ein Schieberegister. Je nach Anschlusssituation
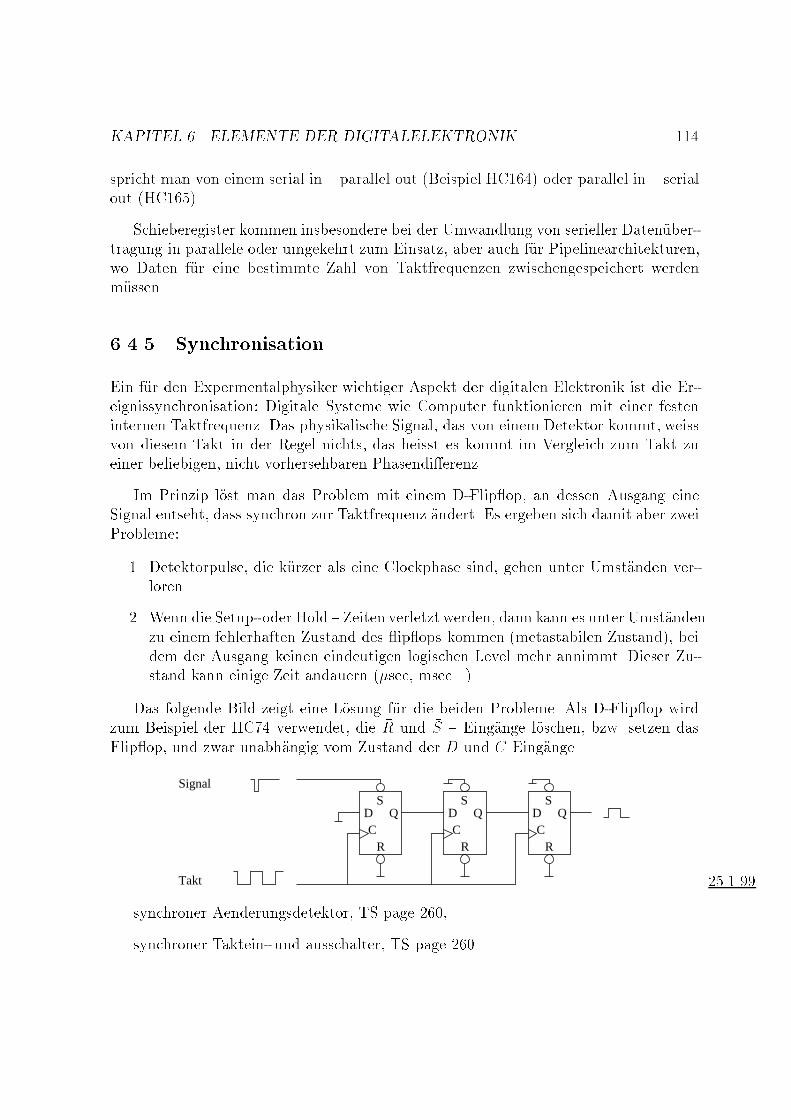
KAPITEL 6. ELEMENTE DER DIGITALELEKTRONIK 114spricht man von einem serial in { parallel out (Beispiel HC164) oder parallel in { serialout (HC165).Schieberegister kommen insbesondere bei der Umwandlung von serieller Daten�uber-tragung in parallele oder umgekehrt zum Einsatz, aber auch f�ur Pipelinearchitekturen,wo Daten f�ur eine bestimmte Zahl von Taktfrequenzen zwischengespeichert werdenm�ussen.6.4.5 SynchronisationEin f�ur den Expermentalphysiker wichtiger Aspekt der digitalen Elektronik ist die Er-eignissynchronisation: Digitale Systeme wie Computer funktionieren mit einer festeninternen Taktfrequenz. Das physikalische Signal, das von einem Detektor kommt, weissvon diesem Takt in der Regel nichts, das heisst es kommt im Vergleich zum Takt zueiner beliebigen, nicht vorhersehbaren Phasendi�erenz.Im Prinzip l�ost man das Problem mit einem D-Flip op, an dessen Ausgang eineSignal entseht, dass synchron zur Taktfrequenz �andert. Es ergeben sich damit aber zweiProbleme:1. Detektorpulse, die k�urzer als eine Clockphase sind, gehen unter Umst�anden ver-loren.2. Wenn die Setup- oder Hold { Zeiten verletzt werden, dann kann es unter Umst�andenzu einem fehlerhaften Zustand des ip ops kommen (metastabilen Zustand), beidem der Ausgang keinen eindeutigen logischen Level mehr annimmt. Dieser Zu-stand kann einige Zeit andauern (�sec, msec...).Das folgende Bild zeigt eine L�osung f�ur die beiden Probleme. Als D-Flip op wirdzum Beispiel der HC74 verwendet, die �R und �S { Eing�ange l�oschen, bzw. setzen dasFlip op, und zwar unabh�angig vom Zustand der D und C Eing�ange.S
RR
DC C C
DD Q QQS S
R
Takt
Signal 25.1.99synchroner Aenderungsdetektor, TS page 260,synchroner Taktein- und ausschalter, TS page 260

Kapitel 7H�ohere digitale SystemeWie bereits diskutiert unterscheiden wir zwischen Schaltnetzen (combinatorial logic)und Schaltwerken (sequential logic). W�ahrend Schaltnetze nur vom momentanen Ein-gangszustand abh�angen (abgesehen von allf�alligen gate propagation delays), erinnerensich Schaltwerke an die Vergangenheit, das heisst sie brauchen einen Speicher. �Andertsich der Ausgang eines Schaltwerkes nut bei festen Taktzeitpunkten spricht man voneinem synchronen Schaltwerk.7.1 Finite State MachinesFinite State Machines (FSM) oder endliche Automaten sind synchrone Schaltwerke, dienur eine endliche Zahl von verschiednen Zust�anden einnehmen k�onnen. Sie lassen sichschematisch wie folgt darstellen:Schalt-netz
Zustands-speicher
k+1nn
l m
kZ Z
X Y X, Y , und Zk werden Eingangsvektor, Aus-gangsvektor und Zustandsvektor (oder kurzZustand) genannt, der letztere stellt also dieInformation dar, die f�ur jeden Taktzeitpunktgespeichert werden.Eine FSMmit einem n dimensionalen Zustandsraum kann also 2n verschiedene Zust�andeeinnehmen. Welcher Zustand Zk+1 auf den Zustand Zk folgt, h�angt auch vom Eingangs-vektor X (auch Quali�er genannt) ab. (Beachte, dass die bereits behandelten Z�ahlerals FSM ohne Eingangsvariablen betrachtet werden k�onnen).115

KAPITEL 7. H �OHERE DIGITALE SYSTEME 116S
SS
0
23
x
x
pon
x 2
1
x 1
2
S1
Oft verwendet man zur Beschreibung der Zu-standsfolge das Zustandsdiagramm. Die Krei-se bedeuten die einzelnen Zust�ande, die alsPfeile dargestellten �Uberg�ange h�angen je-weils vom Zustand einer Eingangsvariableab, diese �Ubergangsbedingungen werden ne-ben dem Pfeil notiert. Unbezeichnete Pfeilesind unbedingte �Uberg�ange, die jeweils direktim n�achsten Takt statt�nden.Ist keine der Bedingungen erf�ullt, bleibt das System in seinem Zustand (Beispiel S2).Diese Tatsache wird manchmal noch mit einer Schlaufe mit der Wartebedingung ver-deutlicht. Jede FSM braucht eine Intialisierung, die zum Beispiel mit pon (Power on)bezeichnet wird.Als alternative Darstellung �ndet das Flussdiagramm analog wie in der InformatikVerwendung. Es eignet sich aber eher f�ur eine Implementation mit einem sequentiellenProgramm.Anwendungsbeispiel: VerkehrsampelRealisierung des ZustandsspeichersDa der Zustand Zk vom Schaltnetz w�ahrend der ganzen Taktphase gebraucht wird,muss man als Speicher ankengetriggerte D-Flip ops oder �aquivalente Schaltkreise ver-wenden.Realisierung des SchaltnetzesDas Schaltnetz kann im Prinzip mit den im letzten Kapitel besprochenen Methodenaus Gattern aufgebaut werden. H�ohere Flexibilit�at erreicht man, indem man einen ad-dressierbaren Speicher verwendet (Zk und X bilden die Adresseing�ange, Y und Zk+1die Datenausg�ange: Lookup table). Allerdings ist die Zahl der Eingangs- und Zustands-variablen auf diese Weise sehr beschr�ankt (einige 20), w�ahrend der gr�osste Teil desSpeicherbereichs oft gar nicht verwendet wird. Deshalb entstand eine ganze Familie vonspeziellen programmierbaren Logikbausteinen, �uber die wir im �ubern�achsten Abschnitteine �Ubersicht gewinnen wollen.Man unterscheidet zwischenTabellenspeicher (Memory) und Funktionsspeichern (pro-grammable logic device).

KAPITEL 7. H �OHERE DIGITALE SYSTEME 1177.2 TabellenspeicherTabellenspeicher sind dadurch gekennzeichnet, dass sie f�ur jeden Eingangszustand (Adres-se) Daten abspeichern und wieder ausgeben k�onnen. Sind n Adressbits vorhanden,k�onnen also 2n Zust�ande gespeichert werden. Solche Speicher werden mit RAM (ran-dom access memory) bezeichnet. Oft werden mehrere Datenbits an einer Adressstellegespeichert, sind es 8 spricht man von einem Byte organisierten Speicher, 4 bit heissenein nibble. Sind es soviele Bits wie die zugh�orige Schaltung (zum Beispiel ein Computer)maximal brauchen kann, spricht man von word organisierten Speichern.Man unterscheidet statische und dynamische RAM. Statische RAMs bestehen imPrinzip aus 2n Flip ops in einer m�oglichst einfachen Form.Adresse
Datenleitung Dynamische Speicher (DRAM) ben�utzen als Speicher-zelle eine Kapazit�at. Das ist platzsparend, hat aber denNachteil, dass die Speicherzelle nach jedem Lesezugri�wieder neu geladen werden muss (Ladungsverlust aufden Anschlussleitungen). Ausserdem muss die Ladungvon Zeit zu Zeit durch Lesen und wieder Beschreibenerneuert werden (refresh cycle). Moderne DRAMs ha-ben diese Logik bereits eingebaut. 27.1.99FIFO und RingspeicherUnter einem FIFO (�rst in { �rst out) Speicher versteht man einen System, indas manDaten eingeben, und sie in der gleichen Reihenfolge wieder auslesen kann. Das ist ansich nichts besonders, jedes Schieberegister hat diese Eigenschaft.Von einem FIFO spricht man allerdings erst dann, wenn die Auslese v�ollig asynchronzum Abspeichern passieren kann. FIFOs werden als Zwischenspeicher zwischen zwei ansich ansynchronen Systemen verwendet, zum Beispiel zwischen einem ADC (analogdigital converter), der mit fester Abtastfrequenz ein Signal ausmessen soll, und demComputer, der die entstehenden Daten von Zeit zu Zeit einlesen in gr�osseren Bl�ockeneinlesen soll. Man spricht auch von einem elasticity bu�er.FIFOs werden als Ringspeicher realisiert. Ein ringf�ormiger Speicher der Tiefe n isteine normaler Speicher, dessen Adressen durch einen Z�ahler bei jedem Schreib- bzw.Lesevorgang um eins erh�oht werden. Wird n erreicht, geht es bei 1 weiter. Es gibt einenseperaten Schreib- und Lesez�ahler, die Read- und Writepointers Ar und Aw genanntwerden.

KAPITEL 7. H �OHERE DIGITALE SYSTEME 118Ein FIFO hat neben Datenein- und Ausg�angen je einen Read und Writestrobe alsEing�ange, mit denen man den Zeitpunkt f�ur das Lesen und Schreiben bestimmen kann.Ausserdem gibt der FIFO je ein Signal 'FIFO full' (Aw � Ar = n), 'FIFO empty'(Ar = Aw) und 'FIFO half full' (Aw �Ar � n=2) von sich, die durch Vergleich der bei-den Adressz�ahler entstehen. Die Speicherorganisation der FIFOs wird in der Form nxbangegeben, wobei n die Tiefe, und b die Breite angibt. Zum Beispiel hat der 74ACT3641eine 1k x 36 Organisation. Das bedeutet er kann 36 bits auf einmal ein- oder auslesenund es ist n = 1024. Dieser chip hat 120 pins und l�auft mit 50 MHz.ROMROM sind Read Only Memories. Das heisst sie werden im normalen Betrieb nur gelesen,und nicht beschrieben. Nat�urlich m�ussen sie bei der Initialisierung 'einmalig' beschrie-ben werden k�onnen. Man unterscheidet:� MROM, oft einfach ROM, Masken { ROM. Bei der Herstellung wird die letzteMetallisierungsschicht nach den Kundenw�unschen speziell hergestellt. Sie enth�altdann die programmierte Information.� PROM, progammierbare ROM. Hier ist eine einmalige Programmierung durcheinen speziellen Programmierpuls mit erh�ohter Spannung m�oglich (zum Beispielwerden Kontakte oder Dioden durchgebrannt).� EPROM, UV{EPROM, mit Ultraviolett { Strahlung l�oschbare ROMs. Hier be-steht die Speicherzelle aus einem MOSFET, der ein zus�atzliches ' oating gate'ohne externen Anschluss zwischen dem normalem gate Anschluss und dem Ka-nal hat. Die Programmierung erfolgt durch Au aden dieses gates mit 'heissen'Elektronen, die durch �Uberspannung erzeugt werden. Mit Hilfe von Ultraviolett-strahlung k�onnen die Elektronen wieder befreit, der chip also gel�oscht werden.EPROMs haben deshalb ein kleines Quarzfenster.� EEPROM. Funktionsm�assig wie EPROM, das L�oschen erfolgt aber elektrisch �ubereinen speziellen L�osch- und Schreibanschluss. Typische L�osch- und Schreibzeitensind einige 10 ms.Bei einem 'nonvolatile RAM' handelt es sich in der Regel um eine Kombination voneinem gew�ohnlichen RAM mit einem EEPROM. Bei Ausfall der Stromversorgung wirdmit dem letzten Rest der Spannung, der Inhalt des RAM auf das EEPROM kopiert.Beim Einschalten wird als erstes der Inhalt des EEPROM in das RAM kopiert. Manch-mal handelt es sich aber bei einem nonvolatile RAM einfach um einen Speicher mitBatterie...

KAPITEL 7. H �OHERE DIGITALE SYSTEME 1197.3 Programmable Logic DevicesMan unterscheidet grunds�atzlich drei verschiedene PLD. N�amlich PAL (programma-ble array Logic), PLE (programmable logic element) und LCA (logic cell array). PALund PLE sind grunds�atzlich gleich aufgebaut und stellen eine direkte Realisierung derdisjunktiven Normalform einer Wahrheitstabelle dar. Das folgende Beispiel zeigt einesolche mit drei Eing�angen X und zwei Ausg�angen Y :& & & & &
1
1
1
1
1
X
Y
Dabei k�onnen beim PAL jeweils dieVerkn�upfungen der Eing�ange zu denAND Elementen programmiert werden,w�ahrend die OR { Zuordnungen am Aus-gang festgelegt sind. Bei einem PLE sinddie AND Zuordnungen fest (Adressen),w�ahrend die OR { Zuordnung zu denAusg�angen programmierbar ist (Daten).Ein PLE ist also dasselbe wie ein PROM(!).PALs werden mit Vorteil dann eingesetzt, wenn es viele Eing�ange gibt, jedoch nurwenige verschiedene Kombinationen �uberhaupt betrachtet werden m�ussen. Ausserdemsind sie oft schneller in der Durchlaufzeit als PROM.FPGALCA werden auch FPGA (�eld progammable gate array) genannt, und unterschiedensich grunds�atzlich von den PALs dadurch, dass sie aus vielen einzelnen CLB (con�gu-rable logic blocks) bestehen.Solche CLB bestehen zum Beispiel bei der XILINX 4000er Serie aus zwei D { Flip- ops mit Set und Reset, deren D { Eing�ange aus einer programmierbaren logischenFunktion mit 8 Eing�angen gebildet werden k�onnen. Clock, Set und Reset k�onnen eben-falls auf verschiedene Weise bedient werden. F�ur Details siehe [XILINX94], Seite 2-10.Es handelt sich also um eine Art Mini FSM.Typische FPGAs bestehen aus 64 bis 1024 solchen CLBs. Die Verbindung zwischenden einzelnen CLBs ist durch in x � y Form angeordnete Leitungen programmierbar.Ausserdem gibt es IOB (input output blocks), bei denen man programmieren kann, obein bestimmter pin input oder output sein soll, ob die Daten mit einem D-FF zwischen-gespeichert werden sollen und ob es sich extern um TTL oder CMOS Level handelnsoll. (siehe Seite 2-14)

KAPITEL 7. H �OHERE DIGITALE SYSTEME 120Ausserdem existiert ein globaler asynchroner Reset.Das eingebaute Kon�gurationsmemory ist als RAM realisert, und hat eine typischeGr�osse von 400 kBit. Man ladet es entweder von einem Computer, oder von einemPROM beim power up reset (Logik daf�ur ist im FPGA schon eingebaut).Typische Anwendungen sind alle logischen Schaltungen, die exibel und doch sehrschnell sein m�ussen (40 MHz sind problemlos, �uber 100 MHz m�oglich), und wo Geldkeine Rolle spielt:� Jede Art von endlichen Automaten� Pipeline Architekturen: Wenn ein bestimmter Schritt eines Algorithmus fertigist, werden die Resultate der Logik f�ur den n�achsten Schritt weitergereicht, undgleichzeitig neue Daten eingelesen.� Ein 16 bit adder braucht 9 CLBs� Ein 16 bit up/down counter braucht 8 CLBsF�ur eine bestimmte Anwendung m�ussen die CLB und die Verbindungen optimalprogrammiert (geroutet) werden. Daf�ur stellen die Hersteller Software zur Verf�ugung.Dabei geht es nicht nur um die richtigen Verbindungen, es muss auch eine Simulation ge-macht werden, um zu kontrollieren, ob das Timing stimmt (Beipiel FSM: Die clocks f�urdie verschiedenen D-FF m�ussen hinreichend synchron kommen, Schaltnetz propagationdelay muss < 1=fmax sein).Klarerweise sind wie immer in der digitalen Logik in der Regel die Zahl der An-schlusspins die begrenzende Gr�osse.Als Eingabeform f�ur das routing wird heute meist eine HDL verwendet, wie wir dasim n�achsten Kapitel an zwei Beispielen ansehen wollen. 1.2.99Boundary ScanIm Zusammenhang mit komplexen logischen Schaltungen stellt sich immer auch diewichtige Frage des Testens. Testen kann sehr schwierig sein, rein aus mechanischenGr�unden (keine Anschl�usse und kein Platz f�ur Testproben), aber auch aus Gr�Undender Komplexit�at. Es ist oft sehr schwierig, das richtige Testprozedere zu de�nieren.Der sogenannte boundary scan soll das Testen erleichtern. Dabei werden alle IOBeines FPGA oder anderen logischen chips in einem grossen Schieberegister miteinander

KAPITEL 7. H �OHERE DIGITALE SYSTEME 121verbunden. Man kann dann ein Testpattern seriell in die IOB schieben, den chip fuer einewohlde�neirte Anzahl Taktzyklen einschalten und anschliessend das Resultat wieder�uber das gleiche Schieberegister zur�ucklesen. Anschl�usse und Bedienungsalgorithmusvon boundary scans sind international genormt.7.4 Hardware Description LanguagesHDL (hardware description languages) sind logische Sprachen, die dazu dienen, einedigitale Schaltung algorithmisch zu beschreiben. HDL Texte sehen �ahnlich aus wiegew�ohnliche Computersprachen (z.B. c, FORTRAN). Sie sind mit einigen Elementenerg�anzt, die es erlauben, den zeitlichen Ablauf der Systeme richtig zu beschreiben.Logische Schaltungen werden heute fast immer in HDL formuliert. Dies erlaubt:� eine eindeutige Beschreibung mit festen Regeln, was die Schaltung eigentlichk�onnen soll. Der HDL Compiler zeigt, ob der Algorithmus in sich konsistent ist.� eine Simulation des Algorithmus mit beliebigen Eingangsbedingungen.� eine direkte Synthese der Schaltung als 'IC{Sarg', f�ur FPGA, f�ur andere PLDs,oder eine direkte ASIC Produktion mit Hilfe von Standardlibraries.� Eine weitere Simulation erlaubt das detaillierte Studium des Verhaltens der Im-plementation. Hier kann vor allem auch das timing kontrolliert werden.� Die autmatische Erzeugung von Testvektoren samt zu erwartendem Ausgang f�ursp�atere Hardwaretests.Synthese ist in der Regel allerdings nur von einer eingeschr�ankten M�achtigkeit der HDLaus m�oglich (sogenannter RTL, Register Transfer Level, wo die Architektur festliegt:Was sind die Zustandsvektoren, FSM, Z�ahler).Beispiel Ka�eemaschine (in VHDL)

KAPITEL 7. H �OHERE DIGITALE SYSTEME 122Beispiel: 16 bit counter in VerilogDas folgende Beispiel hat uns U. Trunk vom MPI Heidelberg zur Verf�ugung gestellt.Vielen Dank!Die Verilog { HDL Beschreibung des 16 bit up/down counters mit synchronem Resetlautet:module Counter (pulse , //cout pulse inputdir, //direction flag 1=up 0=downreset, //resetdata); //counter data outputs (8bit)input pulse,dir,reset;output [7:0] data;reg [7:0] data;always @(posedge pulse)if (reset == 1)data[7:0] = 8'b00000000; //synchronous resetelseif (dir == 1) //counting up or down....data = data + 1;elsedata = data - 1;endmoduleDer Compiler stellt fest, dass alles konsistent ist. EIne Simulation lieferte die erwar-teten Resultate. Schliesslich produziert ein Synthese Programm das folgende Schaltbildauf der n�achsten Seite.Die Implementation dieser Schaltung in einen ASIC mit Hilfe einer Standarbiblio-thek von Transistoren und digitalen Grundschaltungen wird schliesslich schon etwasun�ubersichtlich. (siehe Overheadfolie)

KAPITEL 7. H �OHERE DIGITALE SYSTEME 123

Kapitel 8Signal�ubertragungDie �Ubertragung elektrischer Signale �uber endliche Strecken ist einer Vielzahl vonSchwierigkeiten ausgesetzt, die in der Praxis zu den h�au�gsten Problemen mit elek-tronischen Systemen f�uhren.� Lange Leitungen ergeben Laufzeiten, Re exionen, D�ampfung und Dispersion. EineLeitung muss dann als lang gelten, wenn 1/Anstiegszeit der Signale kleiner als diehalbe Leitungsl�ange ist (siehe Kapitel 1.5).� Die Kapazit�at der Leitungen und der Anschl�usse (Stecker, Eingangskapazit�atender Empf�angerbausteine etc.) erzeugen einen Umladestrom, der umso gr�osser wird,je steiler die Anstiegszeiten sind. Dieser Strom iesst auch in den Masseverbin-dungen.� Str�ome in den Massenverbindungen ergeben durch ihren ohm'schenWiderstand ei-ne zeitlich variable Potentialdi�erenz zwischen Sender und Empf�angerbaugruppen(ground shift potentials, ground bouncing).� Signale in parallel laufende Leitungen erzeugen �Ubersprechen (Crosstalk, X-talk),das heisst die Signale sind nicht nur in ihrer eigenen Leitung sichtbar, sondernauch in benachbarten.� Die elektromagnetische Umweltverschmutzung f�uhrt dazu, dass Leitungen auchSignale aufnehmen, die von anderen Systemen elektromagnetisch abgestrahlt wur-den (Pickup).Diese Probleme sind nat�urlich in erster Linie f�ur die schwachen analogen Signalevon Sensoren relevant. Es zeigt sich aber, dass auch bei schnellen digitalen Systemen124

KAPITEL 8. SIGNAL�UBERTRAGUNG 125diese �Uberlegungen relevant sind. Dabei treten sie nicht nur bei Kabeln, sondern auchbei Verbindungen auf einem p.c.b, oder manchmal sogar innerhalb eines chips auf.Besonders kritisch sind dabei 'mixed signal' Elemente, also chips, die gleichzeitig analogeund digitale Signale verarbeiten.8.1 Digitale SignalstandardsDie bisher diskutierten logischen Standards TTL und CMOS eignen sich beide nicht f�urschnelle Signal�ubertragung. Die Bausteine haben in der Regel nicht gen�ugend Leistungum den Strom f�ur ein 50 oder 100 Kabel zu liefern. Die Rauschemp�ndlichkeit derEing�ange ist viel zu hoch (z.B. 0.4V bei TTL), sodass X-talk, Pickup und Ground-bouncing zu Fehl�ubertragungen f�uhren. Um den X-talk klein zu halten, m�ochte manlangsame Anstiegszeiten und kleine Amplituden, was gerade eine gegenteilige Zielset-zung gegen�uber den Standard - TTL und CMOS Bausteinen darstellt.Man unterscheidet single ended transmission (oder unbalanced transmission) unddi�erential transmission (oder balanced transmission), je nachdem ob nur eine Leitungvorhanden ist, und der Signalstrom durch die Masseverbindung zur�uck iesst, oder aberof eine richtige di�erentielle Doppelleitung vorhanden ist. Maximale �Ubertragungsrateund Leitungsl�ange sind jeweils die wichtigsten Kenngr�ossen.Im weiteren werden unter anderem Anzahl Sender und Empf�anger, Spannungshubbeim Sender und minimaler Spannungsdi�ereny am Empf�anger, minimale Leitungsim-pedanz und Kurzschlussfestigkeit de�niert.Im folgenden werden die h�au�gsten Standards vom elektronischen Standpunkt ausbehandelt. Die logischen Aspekte werden im Computerpraktikum diskutiert werden.8.1.1 IEEE 488Beim IEEE488 oder GPIB handelt es sich um einen 8 bit breiten Bus, mit 8 zus�atzlichenKontrollleitungen mit dem TTL Standard. Er wird f�ur die Verbindung von Mess-und Kontrollger�aten mit Computern verwendet. Es muss genau ein Buscontroller proBus vorhanden sein, es sind aber mehrere aktive Sender m�oglich (open collector Te-chink). Sein Vorteil besteht in seiner weiten Verbreitung, die unter anderem in der sehrvollst�andigen Normierung, inklusive genaue Bedeutung der Kontrollsignale, erlaubteLasten, Steckertyp und -Belegung usw. begr�undet ist.Die maximaleDaten�ubertragung betr�agt 1.5 MByte/sec. �uber maximal einigeMeter. 3.2.99

KAPITEL 8. SIGNAL�UBERTRAGUNG 1268.1.2 EIA-232Dabei handelt es sich um eine sogenannte 'single ended transmission'. Das heisst dasSignal wird �uber eine Leitung �ubertragen, der R�uckstrom muss �uber die Masseleitungerfolgen.Dieses System hat den Nachteil, dass Massepotentialdi�erenzen entsprechende �Uber-tragungsfehler erzeugen k�onnen. Die �Ubertragungsrate ist auf etwa 20kBit/sec in 20mDistanz beschr�ankt.Daf�ur ergeben sich geringe Kosten und einfache Implementierungen, sodass diesesSystem immer noch sehr verbreitet ist.Die Signale m�ussen mindestens �3V Amplitude haben (positiv heisst '0', negativ'1') und sollen eine Anstiegszeit haben, die kleiner als 30V/�s bleiben soll, damit eskein X-talk gibt.+
Tx Rx
Die maximale erlaubte Kabelkapazit�atist mit 2500 pF spezi�ziert, was zueiner Leitungsl�ange von typisch 20 mf�uhrt. Diese Daten zusammen mit dermax. �Ubertragungsrate von 20 kbit/secf�uhren dazu, dass keine Abschlusswi-derst�ande n�otig sind.DIe EIA-232 Norm beschreibt auch einen 25-poligen Stecker mit diversen Kontroll-leitungen. Oft wird auch ein 9-poliger DB9S Stecker verwendet, der ein subset derEIA-232 Signale enth�alt. Die DTE - Seite (data terminal equipment, Stiftstecker, z.B.PC) wird mit der DCE (data communication equipment, Buchsenstecker, z.B. Modem)verbunden. Die Bedeutung der Leitungen sind� Pin 1, DCD, data carrier detect. von DCE nach DTE. Aktiv, wenn das Modemg�ultige Daten empf�angt.� Pin 6, DSR, data set ready. von DCE nach DTE. Aktiv, wenn das Modem Ver-bindung hat.� Pin 2, RD Receive Data. von DCE nach DTE.� Pin 7, RTS, request to send, von DTE nach DCE� Pin 8, CTS, clear to send, von DCE nach DTE� Pin 3, TD, Transmit data, von DTE nach DCE

KAPITEL 8. SIGNAL�UBERTRAGUNG 127� Pin 4, DTR, data terminal ready, von DTR nch DCE� Pin 9, RI, Ring indicator, von DCE nach DTR� Pin 5, MasseWill man zwei DTE, z.B. PC's miteinander verbinden, so braucht es ein Nullmodem,dass vor allem die Pins 2 und 3 vertauscht, sowie die verschiedenen Kontrolleitungenrichtig verbindet (je 7,8 mit 1 und 4 mit 6 verbinden).Die Daten�ubertragung wird mit einer Flanke von + nach - auf der Datenleitungeingeleitet. Nach einem Takt (Startbit, '1') folgen 7 oder 8 Datenbits, evt. gefolgt voneinem Parity bits und einem oder 2 Stopbits ('0'). Eine solche Datengruppe wird framegenannt. Man beachte, dass keine separate clock �ubertragen wird (asynchronous trans-mission protocoll ATP). Die EIA-232 Leitungen werden mit UART chips (universalasynchronous Receiver and Transmitter) bedient.Die heute meist gebr�auchliche Einstellung ist 8N1, das heisst 8 bits, keine Parityund 1 Stopbit. Nat�urlich muss auch die Rate auf beiden Seiten richtig eingestellt sein.Zum Teil sind die Systeme in der Lage die Taktfrequenz zu erkennen.8.1.3 Di�erentielle Systeme: RS423, RS 485 und LVDSVerwendet man auf der Empf�angerseite einen Di�erenzverst�arker, und f�uhrt jeweils jeeine Daten- und Masseleitung separat, kann man das Problem der Potentialdi�erenzenweitgehend umgehen. Ebenfalls wird der pickup wegsubtrahiert.+
Tx Rx
Die RS423 Norm erlaubt Da-ten�ubertragungen von 120 kbps (3kbps) �uber Distanzen von 30 m (1200m). Es d�urfen maximal 10 Empf�angeran einen Sender angeschlossen werden.Die Mindestpulsh�ohe betr�agt �200mV. Die Eingangsimpedanz betr�agt 4k , es gibtalso noch keinen Wellenabschluss des Kabels.Geht man schliesslich diesen Weg konsequent weiter, kommt man zum RS 485 (ISO8482) Standard, der aus einem vollst�andig di�erentiellen 120 Leitung mit korrektemAbschluss an beiden Enden besteht. Es sind nun mehrere Sender m�oglich. Die Ein-gangsimpedanz der Empf�anger betr�agt 12k , es k�onnen maximal 32 Empf�anger oderSender angeschlossen werden.

KAPITEL 8. SIGNAL�UBERTRAGUNG 128120 120
Rx Tx Rx Tx
Die Schwellwertspannung am Empf�anger betr�agt�200 mV, die typische Signalemplitude ist 3V, waszusammen mit den 100 Leiterimpedanz eine er-hebliche Verlustleistung ergibt. RS485 Treiber sindoft thermisch �uberlastgesch�utzt.Man kann bis zu 10 MBit/sec und bis �uber 1000 m Daten �ubertragen. Allerdingssind die Interfacebausteine teurer, und man muss twisted pair Kabel nehmen. Beachte,dass die Masseverbindung n�otig ist, um sicherzustellen, dass die Signale am Empf�angerim erlaubten Spannungsbereich (-7V ... +12V) bleiben.Das CAN (controller area network) funktioniert im Prinzip mit einem solchen Bus,wobei eine bus arbitration so de�niert ist, dass ohne Kontrollleitungen viele Geraeteam gleichen Bus h�angen koennen.Tx
Rx +-
CAN _HCAN_L Die Treiber der Leitungen sind als open collector aus-gef�uhrt, sodass ein logische '1' dem passiven Zustandentspricht. Damit kann ein Sender testen, ob der Busgerade frei ist. Daf�ur wird vorerst ein 12-bit langes busarbitration Wort gesendet. Sendet er eine '1', und siehtaber eine '0', so weiss der Sender, dass ein anderer Sen-der aktiv ist und stellt sich selber wieder ab. DiesesVerfahren ist im Detail festgelegt, und erlaubt ein volleBusfunktionalit�at mit einem minimalen Verkabelungs-aufwand.High Speed CAN kann eine Datenrate von 1 MBit/s �uber eine Distanz von 40 m�ubertragen. Maximal 30 Ger�ate k�onnen an der Leitung mit 120 IMpedanz h�angen,Abzweigungen d�urfen maximal 30 cm lang sein. Typischer Driver chip: SN75LBC031.NachdemCAN urspr�unglich in der Automobilindustrie erfunden wurde, hat es in j�ungsterZeit eine starke Verbreitung im Bereich der Kontrollsysteme gefunden.Das LVDS (low voltage di�erential system) ist eine relativ neue Entwicklung undberuht auf demselben Prinzip, arbeitet aber mit kleineren Spannungen (Schwellwert 100mV, Amplitude typisch 350 mV), sodass �Ubertragunsraten bis mindestens 155 Mbpsm�oglich sind. Hier wird bei den Treibern der Strom reguliert (typisch 3.5 mA), sodassdie Abschlusswiderst�ande auf jeden Fall gebraucht werden. Ein typischer Vertreter istder DS90C031 (Sender), DS90C032 (Empf�anger). Letzterer hat ausserdem die ange-nehme Eigenschaft, dass o�ene Eing�ange einen stabilen HIGH Zustand am Ausganggarantieren.LVDS ist zu empfehlen f�ur alle neue gebauten Systeme. Es ergibt die kleinsten X-

KAPITEL 8. SIGNAL�UBERTRAGUNG 129talk Probleme und die gr�osste St�orsicherheit. Man erreicht die bis zu 200 Mbps �uber 2m, oder 5 Mbps �uber 100 m.8.2 Pickup, X-talk und Rauschen in der PraxisBisher haben wir bei verschiedenen Gelegenheiten diverse unerw�unschte E�ekte bei derdigitalen (und analogen) Daten�ubertragung kennengelernt: �Uber- und Unterschwingerwegen Re ektionen, X-talk, pickup, ground bouncing. Die folgenden Hinweise und Re-geln sollen mithelfen, diese Probleme in der Praxis zu minimieren:�UberschwingerEin korrekter Leitungsabschluss hilftRe exionen zu vermeiden. Leider ist das aber nichtimmer m�oglich (DC Strom reicht nicht, Stecker und Kabelinhomogenit�aten produzierenRe exionen, Abzweigungen an Kabeln k�onnen nicht immer kurz genug gehalten werden,usw.)F�ur nicht zu hohe �Ubertragungsfrequenzen (f � 1=Laufzeit) ergibt das Anpassendes Ausgangsimpedanz des Treibers an die nominelle Kabelimpedanz oft eine befriedi-gende L�osung:Z00R=Z Das Signal auf der Senderseite geht vor-erst entsprechend dem Spannungsteiler ausR und dem Kabel auf die halbe Spannung.Wenn die re ektierte Welle zur�uckkommt,wird die volle Spannung erreicht.Auf der Empf�angerseite gibt es in erster N�aherung weder �Uber- noch Unterschwinger.Diese Schaltung mit o�ener Leitung eignet sich auch gut, um Impedanzen von Leitungenzu messen: Aus dem Verh�altnis der ersten zur zweiten Amplitude bestimmt man Z0,aus der Laufzeit daraus L und C der Leitung.Ausserdem werden oft auf der Empf�angerseite Dioden in Sperrrichtung gegen Masseund Stromversorgung eingebaut. Dies vernichtet die Energie der �Uberschwinger.�UbersprechenLaufen zwei Leitungen parallel so ergibt sich eine gegenseitige Induktivit�at Lc und einesolche Kapazit�at Cc. Diese werden analog der Leitungsimpedanz in eine komplexe gegen-seitige Impedanz Zc = qLc=Cc (coupling impedance) zusammengefasst: Der Crosstalk

KAPITEL 8. SIGNAL�UBERTRAGUNG 130C ergibt sich dann: C := V2V1 = 11 + 2ZcZ0 (8.1)wobei V2 die Amplitude des induzierten, V1 diejenige des urspr�unglichen Signales undZ0 die Leitungsimpedanz bedeutet.F�ur printed circuits zeigt die folgende Tabelle drei Beispiele f�ur gegenseitige Im-pedanzen und Crosstalk. Es sind parallel laufende Leiterbahnen angenommen, derenBreite gleich dem Abstand zwischen den Bahnen ist. Verglichen werden die F�alle, ohneund mit Massenebene auf der R�uckseite (\Backplane"), sowie der Fall, bei dem eineLeiterbahn zur Abschirmung ihrer Nachbarn voneinander auf Masse gelegt ist:Z0 [ ] Zc [ ] C [%]ohne backplane 200 100 50mit backplane 80 125 25mit Masse zwischenden Leiterbahnen 100 400 1110% crostalk ist in digitalen designs durchaus �ublich und in der Regel funktionieren dieSchaltungen problemlos.Analysiert man die Sache genauer (siehe zum Beispiel im [TI-98], page 2-23 bis 2-27), �ndet man, dass der sogenannte \backward crosstalk", also das �ubersprechendeSignal am Anfang der Leitung st�arker ausgepr�agt und positiv ist und durchaus dasmehrfache an Amplitude erreichen kann. Es ist deshalb wichtig, dass parallele Leitungenmit crosstalk an beiden Enden richtig abgeschlossen werden! Der \forward crosstalk"ist in der Regel negativ.F�ur Kabel wird der X-talk im allgemeinen viel gr�osser. Deshalb werden twisted pairKabel verwendet, bei denen man ebenfalls etwa 10% x-talk erreicht.PickupUnter Pickup versteht man das Einkoppeln von fremden Signalen auf die Datenleitun-gen. Eigentlich ist der X-talk eine spezielle Form des Pickups.Beim elektrischen Einkopplen wirkt die kapazitive Kopplung Cc zwischen der St�orquelleund der �Ubertragungsleitung. Das eingekoppelte Signal ist demnach di�erenziert undproportional zu RCc, wo R der Abschlusswiderstand der Leitung ist (falls f � 1=RCc).Gegen elektrisches Einkoppeln hilft also eine elektrostatische Abschirmung (\Fara-dayk�a�g") und eine kleine Eingangsimpedanz der Empf�anger.

KAPITEL 8. SIGNAL�UBERTRAGUNG 131Magnetische Einkopplung entsteht, wenn in einer Leiterschlaufe durch das Fara-dy'sche Induktionsgesetz eine Spannung induziert wird. Dagegen hilft das Vermeidenvon Leiterschlaufen, insbesondere muss darauf geachtet werden, dass Masseleitungensch�on ordentlich parallel zur Signalleitung gef�uhrt wird (am besten twisted pair). Wei-tere Masseleitungen sind nach M�oglichkeit zu vermeiden.Schliesslich spricht man von galvanischer Einkopplung, wenn der St�orstrom direktauf die Signalleitung oder die zugeh�orige Referenzmasse Verbindung hat.Abschirm- und ErdungsregelnDie folgenden Abschirmregeln und die Erdungsregeln gelten nat�urlich insbeondere auchf�ur analoge Signale. Besonders zu beachten sind sie in der Gegend von physikalischenSensoren.1. Elektrische Abschirmungen von Kabeln sollen immer auf beiden Seiten angeschlos-sen werden, da sonst das freie Ende als Antenne wirkt, und entsprechende Signalein die Signalleitungen einkoppelt (einseitig hilft manchmal bei kleinen Frequenzenin der Audiotechnik).2. Zus�atzliche Masseleitungen sollen eng parallel, wenn m�oglich verdrillt zu den Si-gnalkabeln gef�uhrt werden (keine Leiterschlaufen).3. Jede Art von Str�omen auf den Masseleitungen vermeiden. Alle Signale di�erentiell�ubertragen. Niemals Stromversorgungsstr�ome �uber Referenzmasse iessen lassen!4. M�ogliche Rauschquellen m�ussen ebenfalls gut abgeschirmt werden.5. Abschirmungen m�ussen \wasserdicht" sein, Lochgitter n�utzen �uberhaupt nichts(Durchgri� des elektrischen Feldes), sie m�ussen dick genug sein, sodass einerseitsder ohm'sche Widerstand klein gegen�uber allen Signalleitungsimpendanzen ist,und die Dicke gross gegen�uber der Skintiefe ist (Beispiel: Alu bei 100 MHz: � =8:5�m, bedampfte Mylarfolie hilft also nichts, aber Haushaltsfolie ist oft o.k.).6. Alle leitenden Teile innerhalb der Abschirmung m�ussen an einem festen Punktsternf�ormig angeschlossen sein. Hier sollen ebenfalls die Abschirmungen der Zu-f�uhrungsleitungen angeschlossen sein.7. Bei Sensoren stets den gesamten Signalkreislauf betrachten. Darauf achten, dassdieser so kurz als m�oglich ist, keine fremden Str�ome darin iessen und keine Leiter-schlaufen vorhanden sind.

KAPITEL 8. SIGNAL�UBERTRAGUNG 132In kritischen F�allen hilft oft eine doppelte Abschirmung, wobei eine innere Ab-schirmung nur gerade den Sensor und die erste Vorverst�akerstufe umfasst. Diese AB-schirmung wird mit einem m�oglichst kurzen Kabel an die Masse dieses Verst�arkersangeschlossen. Eine �aussere Abschirmung umfasst alle Teile des Systems. Die Signal-und Stromversorgungsleitungen sollen nur an einer einzigen Stelle gemeinsam durch einLoch in das innere gelangen. Am Rand dieses Loches wird der \Massenstern" ange-bracht, an dem die Abschirmung der �ausseren Kabel, die Stromversorgungsmasse, die�aussere Abschirmung und alle �ubrigen leitenden Teile des Systems direkt (sternf�ormig)angeschlossen werden.

Kapitel 9DatenakquistionssystemeDatenakquisitionssysteme dienen dazu, physikalische Messdaten zu erheben, und siedauerhaft auf elektronischen Rechenanlagen abzuspeichern. Sie bestehen aus folgendenElementen:� Der Mesf�uhler oder Sensor dient der Umwandlung der zur messenden physikali-schen Gr�osse in einen elektrischen Strom oder Spannung. (siehe Kapitel 5).� Ein Verst�arker unmittelbar neben dem Sensor wird ben�otigt, um die in der Regelkleinen Str�ome oder Spannungen in gr�ossere Spannungen umzuwandeln, sodasssie st�orungsfrei �uber eine gr�ossere Distanz �ubertragen werden k�onnen.� Ein analoges Filter erlaubt eine erste Verarbeitung des Signales. Im einfachstenFalle handelt es sich um ein Antialias�lter (siehe �ubern�achster Abschnitt), esk�onnen aber auch kompliziertere Funktionen interessant sein (z.B. peak�ndingetc.). Hier m�ussen alle Funktionen eingebaut werden, die vor der Digitalisierungdurchgef�uhrt werden m�ussen.� Ein ADC dient der Digitalisierung der Daten (siehe unten)� Ein FIFO dient als Zwischenspeicher der Daten. (siehe 7.2).� Ein digitales Rechensystem verarbeitet und speichert die Daten.Analog { Digital { WandlerADC dienen der Umwandlung von analogen Spannungen in digital dargestellte Zahlen.Hier wollen wir nicht auf den internen Aufbau der ADC's eingehen, sondern nur deren133

KAPITEL 9. DATENAKQUISTIONSSYSTEME 134charakteristischen Parameter besprechen. Generell gilt, dass ADC's mit umso kleinerenmaximalen Frequenz konvertieren k�onnen, desto genauer (h�ohere Zahl von Bits) siesind.Folgende Parameter sind f�ur die Auswahl eines ADC's wichtig:� Die maximaleTaktfrequenz. Alle ADC's haben einen Takteingang, dessen positiveoder negative Flanke den Zeitpunkt bestimmt, wann der analoge Spannungswertdigitalisiert wird.� Der maximale Eingangsspannungsbereich (full scale Vfs). Sie liegt im Bereich von0.1 bis 10 V. Kleinere Spannungen m�ussen zuerst verst�arkt werden, aber nicht zunahe am ADC, wegen Clockpickup!� Die Au �osung. Man gibt die Anzahl Bits n der digitalen Darstellung, oder derkleinste messbare Unterschied �V = Vfs=2n an. Die Tatsache, dass der kleinstedigitale Schritt immer endlich ist, f�uhrt zu einem Messfehler, den man auch denQuantisierungsfehler nennt. Entsprechend wird f�ur die Abweichung vom wahrenSignal der Begri� Quantisierungsrauschen verwendet.� Die Darstellung von negativen Zahlen: Two's Complement (siehe 6.4.1) oder Bina-ry O�set (das heisst der Nulpunkt der Eingangsspnanung wird auf den Mittelwertdes digitalen Zahlenbereiches abgebildet).� Die aperture time ist die Zeit, in der das Eingangssignal einigermassen konstantsein soll (�Anderung < �V ). Sie ist in der Regel nur wenig ns lang.AliasingDie endliche Abtastfrequenz fc eines ADC's f�uhrt dazu, dass hohe Engangssignalfre-quenzen fs auf der digitalen Seite nicht mehr richtig erkannt werden k�onnen.Man �uberzeugt sich leicht, dass f�ur eine harmonisches Signal mit fs = fc=2 geradenoch die richitge Frequenz auf der digitalen Seite erkannt werden kann. Ist geradefs = fc erkennen wir �uberhaupt kein Signal mehr, der digitale Ausgang stellt eineGleichspannung dar. Dazwischenliegende Frequenzen werden an fc=2 gespiegelt.Noch h�ohere Frequenzen werden - evt. gespiegelt - in den Frequenzbereich [0 : : : fc=2]abgebildet. Dieser E�ekt heisst Aliasing, und kann sehr verwirrend sein. Bei Verwendungdigitaler Oszilloskope tritt er ebenfalls h�au�g auf. Er kann auch als Schwebung zwischenfs und fc interpretiert werden. Man spricht auch vom Nyquisttheorem.

KAPITEL 9. DATENAKQUISTIONSSYSTEME 135Ein Antialias�lter vor dem ADC Eingang wird als Tiefpass mit einer Grenzfrequenzunter fc=2 und einer m�oglichst hohen Ordnung realisiert. Es sorgt daf�ur, dass keinAliasing auftreten kann.

Index�=4 { Leitungen, 26k, 3�Ubertragungsfunktion, 5, 588421 Code, 113Abfallzeit, 100Abschirmregeln, 131AC-Kopplung, 8adaptiver Regelung, 73ADC, 133Addierer, 79Admittanz, 3aktive Flanke, 95aktive Last, 50Akzeptoren, 28Aliasing, 134Amplitudengang, 5Amplitudenrand, 68analogen Netzteilen, 38Anstiegszeit, 100Antialias�lter, 135aperture time, 134asynchroner Z�ahler, 113asynchronous transmission protocoll, 127Ausgangskennlinie, 16Ausgangssteuerbereich, 76Ausgangswiderstand, 76Avelanche Photodioden, 89balanced transmission, 125band gap energy, 27BCD-Z�ahler, 113Bessel�lter, 83binary coded decimal, 113
binary digit, 94bin�aren Zust�anden, 94bipolare Koe�zientenglied, 78bipolaren Transistoren, 38bit, 94Blindwiderstand, 3Bodediagramm, 5Boole'sche Algebra, 96Bootstrapschaltung, 53boundary scan, 120Busbetrieb, 103Bustransceivers, 103Butterworth�lter, 83Byte, 117CAN, 128carry look ahead, 109Cascode, 50Cascode, Kaskode, 51charakteristische Gleichung, 67CLB, 119Clock, 111clock, 95CMOS, 43, 105combinatorial logic, 115combinatorial logics, 110common mode rejection, 76common mode rejection ratio, 50con�gurable logic blocks, 119controller area network, 128coupling impedance, 129crest factor, 2Crosstalk, 124, 129136

INDEX 137D{Latch, 111Datenakquisitionssysteme, 133depletion region, 31Dezibel, 6di�erential transmission, 125Di�erentiator, 81Di�erenzverstarker, 49Di�erenzverst�arkung, 49Di�usionspotential, 31Di�usionsstrom, 32digitale Systeme, 94Digitalelektronik, 94Diode, 34Diodengleichung, 32Disjunktion, 96diskjunktiven Normalform, 98Dispersion, 24divide{by{2, 112Donator, 28Doping, 28Dotierung, 28Drain, 41Drehstromnetz, 17Dreieckschaltung, 18Dunkelstrom, 88Durchtrittskreisfrequenz, 69E-Reihen, 12Early{E�ekt, 39Earlyspannung, 40Eckfrequenz, 69ECL, 104edge triggered, 112E�ektivwert, 2Eingangswiderstand, 76elasticity bu�er, 117Elektrometerverst�arker, 78Emitterfolger, 52emittergekoppelte Logik, 104Emitterschaltung, 46endliche Automaten, 115
Energieb�ander, 27Erdungsregeln, 131Ersatzschaltbild, 11, 15exponentieller Verst�arker, 80falltime, 100Faltungsintegral, 58fanout, 99Fermifunktion, 27FET, 41�eld progammable gate array, 119FIFO, 117Finite State Machines, 115�rst in { �rst out, 117Flip-Flop, 110Flussdiagramm, 116forward bias, 32FPGA, 119frame, 127Frequenzgang, 5Frequenzraum, 6Fulladder, 109Funktionsspeichern, 116F�uhrungsgr�osse, 65F�uhrungs�ubertragungsfunktion, 66Gate, 41gates, 96Gatter, 96gefaltete Kaskode, 52Gegenkopplung, 64generate, 109Gewichtsfunktion, 58Gleichtaktunterdr�uckung, 50, 76Gleichtaktverst�arkung, 50, 76GPIB, 125Grenzfrequenz, 6, 76Grenzschicht, 30ground bouncing, 124ground shift potentials, 124G�ute, 62

INDEX 138Halbaddierer, 109hardware description languages, 121HDL, 121hochohmig, 16Hochpass, 7hold time, 95Hurwitzkriterium, 67Hysteresis, 81IEEE488, 125Impedanz, 3Impedanzwandler, 78Impuls, 56Impulsantwort, 6, 58Induktivit�aten, 4Innenwiderstand, 15Instrumentenverst�arker, 80Integrator, 80integrierten Schaltkreisen, 45Intermodulationsabstand, 64Intermodulationsprodukte, 64intrinsischer Leitung, 28Istwert, 65junction, 30Kanal, 41Kapazit�aten, 4Kapazit�atsdioden, 34Kapazit�atsmessbr�ucke, 10Kausale Systeme, 57Kelvinschaltung, 13Kleinsignalanalyse, 17Klemmenspannung, 15Klirrfaktors, 63Kniespannung, 43Knotenregel, 18Koaxkabel, 22Kollektorschaltung, Drainschaltung, 52Komparator, 51, 81komplex, 1komplexe Amplituden, 2
Kondensatorgleichung, 5Konjunktion, 96konjunktive Normalform, 99Kosinusphi, 3Kreis�ubertragungsfunktion, 66kurze Leitungen, 26Kurzschluss, 16Lapalacetransformation, 60Latchup, 106Lawinendurchbruch, 37LCA, 119Leerlauf, 16Leistungsanpassung, 19Leitung, 21Leitungsabschluss, 25Leitungsband, 27Leitungselektronen, 28Levelshifting, 38Lineare Systeme, 57Linearisierungstrick, 48logarithmischer Verst�arker, 80logic cell array, 119Logikfamilien, 108Lookup table, 116loop gain, 65LS-TTL, 102LVDS, 128l�angsgeregelten Netzteilen, 38L�ocher, 28Majorit�atsleitung, 30Maschenregel, 18master{slave, 112Maxwellgleichungen, 21Mehrphasensysteme, 17Memory, 116Mesf�uhler, 133Messf�uhler, 86Millerkapazit�at, 40, 50, 51Minorit�atsleitung, 30

INDEX 139Mitkopplung, 64Mittelwertbildner, 7MOSFET, 42multiplexten, 95n-Kanal, 42Negation, 96Neutralleiter, 18nibble, 117Nichtlineare Systeme, 63nichtlinearen Widerst�anden, 13niederohmig, 16NIM - Standard, 105NTC, 13, 91Nyquistkriterium, 67Nyquisttheorem, 134o�ene Verst�arkung, 65O�setspannung, 76O�setspannungsdrift, 76Ohm'sches Gesetz, 3open collector, 103open loop gain, 65Operationsverst�arker, 75Operatoren, 2PAL, 119Parallelschaltung, 3phase locked loop, 84Phasen, 18Phasenrand, 68Phasenreserve, 68Photoe�ekt, 86Photoleiter, 89Photomultiplier, 87Phototransistoren, 89Photovervielfacher, 87Photowiderst�ande, 89Pickup, 124, 130piezoelektrische E�ekt, 92pin Dioden, 36Platintemperaturf�uhler, 91
Platinwiderst�ande, 91PLD, 119PLE, 119presettable Counter, 113product of sums, 99programmable array Logic, 119programmable logic device, 116programmable logic element, 119programmierbaren Spannungsteiler, 48propagate, 109propagation delay, 100Proportionalregler, 68Pt100, 91PTC, 13, 91Quali�er, 115Quantene�zienz, 87Quantisierungsfehler, 134Quantisierungsrauschen, 134Recombination{Generation{Current, 35Re exionen, 129Re exionsfaktor, 25Regelabweichung, 66Regeldi�erenz, 66Regelgr�osse, 65Regelstrecke, 66Reglers, 66Relais, 101reverse bias, 32ripple carry, 109ripple counter, 113risetime, 100ROM, 118root mean square, 2R�uckkopplung, 64R�uckwirkung, 40Schaltalgebra, 96Schaltnetze, 110Schaltnetzen, 115Schaltwerk, 110
INDEX 140Schaltwerken, 115Scheinwiderstand, 3Scheitelfaktor, 2Scheitelwerte, 2Schieberegister, 113Schleifenverst�arkung, 65Schmitt{Trigger, 81Schutzerdung, 18Seebecke�ekt, 91Semigauss { Filter, 63Sensor, 133Sensoren, 86sequential logic, 115sequential logics, 110Serieresonanzkreis, 9setup time, 95Shaper, 63sign extension, 110Signale, 55single ended transmission, 125Skine�ekt, 24SMD, 11Solarzellen, 89Sollwert, 65Source, 41Sourcefolger, 52Sourceschaltung, 46Spannungsquelle, 15Spannungsteiler, 19, 48Sperrschicht, 31SperrschichtFET, 42Sperrstrom, 32Sprungantwort, 6, 58Sprungfunktion, 56Steilheit, 40Stellgr�osse, 66Sternschaltung, 18Stossantwort, 58Stossfunktion, 56Stossimpuls, 56Striplines, 23
Stromgegenkopplung, 48Strommonitor, 79Stromquelle, 15Stromspiegel, 49Stromverst�arkung, 39St�orgr�osse, 65St�or�ubertragunsfunktion, 66Subtrahierer, 80Subtraktion, 110sum of products, 98synchronen Schaltwerk, 115synchronen Z�ahler, 113System, 57S�attigungsbetrieb, 40Tabellenspeicher, 116Taktleitung, 95Tastkopf, 9Tastverh�altnis, 56Testfunktion, 6Thermistoren, 13Thermospannung, 91timing diagrams, 95toggle, 112tranparent, 111Transadmittanzverst�arker, 79Transconductance, 44Transimpedanzverst�arker, 78Transistor, 38Transitfrequenz, 76Transkonduktanzverst�arker, 79tristate, 103Tschebysche��lter, 83TTL, 102Twisted Pair Kabel, 22Two's complement, 110Uebersprechen, 129unbalanced transmission, 125unity gain freqeuncy, 76universal asynchronous Receiver and Trans-mitter, 127

INDEX 141up/down counter, 113Valenzband, 27VDR, 13Verst�arkungsbandbreiteprodukt, 76Verarmungszone, 31verdrillte Leitungen, 23Verst�arkungsmass, 6verzerrungsfreien Leitung, 24Verz�ogerungszeit, 100Vierdrahtmessung, 13virtuelle Masse, 78Volladdierer, 109Wellenimpedanz, 22Wellenwiderstand, 22Widerstandsd�ampfung, 23Wienbrucke, 10wired OR, 101Wirkwiderstand, 3word, 117X-talk, 124Zeiger, 2Zeitinvariante Systeme, 57Zeitraum, 6Zenerdioden, 37Zenerspannung, 36Zenerstrom, 36Zustandsdiagramm, 116Zweierkomplement, 110

Literaturverzeichnis[Best87] Roland Best Handbuch der analogen und digitalen Filterungstechnik, AT Ver-lag Aarau, 1987[Bron98] I.N. Bronstein, K.A. Semendjajew, G. Musiol, H. M�uhlig: Taschenbuch derMathematik, Harri Deutsch 1998.[Ebel78] T. Ebel: Regelungstechnik, Teubner Studienskripten Nr. 57, 1978[Hin96] Hermann Hinsch: Elektronik, ein Werkzeug f�ur Physiker, Springer 1996.[Horo97] Paul Horowitz, Winfried Hill The Art of Electronics, Cambridge UniversityPress 1989, reprinted 1997.[Jack90] Jackson, Electrodynamics[Kori98] Ralf Kories, Heinz Schmidt-Walter: Taschenbuch der Elektrotechnik, HarriDeutsch 1998.[Laker94] K.R. Laker, W.M.C. Sansen: Design of analog integrated circuits and systems,McGraw Hill 1994.[N�uhr98] Dieter N�uhrmann: Das grosse Werkbuch Elektronik, 4 B�ande, Francis 1998.[Pier96] Robert F. Pierret: Semiconductor Device Fundamentals, Addison-Wesley 1996.[Putz71] W. Putz et al.:Elektrotechnik und Kerntechnik, Rowohlt Technik Lexikon,Hamburg 1971[TI-98] E. Haselo�, H. Beckemeyer, J. Zipperer: Data Transmission Design Seminar,Texas Instruments 1998.[Tiet91] U. Tietze, Ch. Schenk: Halbleiter-Schaltungstechnik, Springer 1991.[XILINX94] XILINX, The programmable logic data book, San Jose, Ca. 1994.142