energy-efficient controller design for a redundantly …molong/pdf/pub/j/tmech15.pdfhybrid feed...
TRANSCRIPT
1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TMECH-02-2015-4329 1
Abstract— This paper presents a method for designing a
controller that achieves the best positioning performance while maximizing the energy efficiency of a redundantly-actuated hybrid feed drive. A two degree-of-freedom controller, consisting of a feed forward (FF) controller for tracking and a feedback (FB) controller for regulation, is assumed. It is shown that the ideal FF controller, which achieves perfect tracking with maximum efficiency, is not always stable. Therefore, a method for designing a stable FF controller that achieves perfect tracking with near optimal efficiency is proposed. Furthermore, the optimal relationship between FB control inputs, which guarantees maximum efficiency for any specified regulation performance, is derived. Two approaches for using the derived optimal relationship to synthesize a FB controller that achieves the best positioning performance while maximizing efficiency are proposed. Simulations and machining experiments are conducted to demonstrate the effectiveness of the proposed energy-efficient FF and FB controller design methods. Significant improvements in energy efficiency (without sacrificing positioning performance) are reported.
Index Terms— Energy Efficiency; Control Structure Design; H2/H∞ Optimization; Hybrid Feed Drive; Redundant Actuation
I. INTRODUCTION
eed drives are used for coordinated motion delivery in manufacturing machines. Consequently, their positioning
accuracy and speed are critical to the quality and productivity of a variety of manufacturing processes [1]. Moreover, they account for a significant portion of the energy consumption of manufacturing machines [2], [3]. Therefore, a lot of work has been done in the literature related to improving their energy efficiency, e.g., [4]–[10]. It is however recognized that, to achieve truly sustainable manufacturing, improvements in energy efficiency must be achieved without unduly sacrificing quality and productivity [11].
Most machine tools utilize screw drives (SDs) for actuating their feed axes [1]. The reason is that SDs are cost effective and have high mechanical advantage which allows them to support high cutting (i.e., machining) forces with very low energy consumption [12], [13]. The speed and accuracy of SDs are
Manuscript received on February 6, 2015. This work is funded by the
National Science Foundation’s CAREER Award #1350202: Dynamically Adaptive Feed Drives for Smart and Sustainable Manufacturing.
M. Duan and C.E. Okwudire are with University of Michigan, Ann Arbor, MI 48109 USA. (e-mail: [email protected]; [email protected]).
however limited because of mechanical issues like vibration, wear, backlash and geometric errors of the screw and associated mechanical components [1], [13]. To mitigate these shortcomings, linear motor drives (LMDs) are increasingly being resorted to [13]–[18]. LMDs can achieve higher speeds and accelerations than SDs and are not subject to the inaccuracies caused by geometric errors, wear and structural deformations arising from the screw and other mechanical components like bearings, couplers and nuts that are connected to it [1], [13]. LMDs are therefore generally more precise than SDs. However, because they provide no mechanical advantage, they consume a lot more electrical energy to support cutting forces than SDs, thus significantly increasing the energy consumption of the machine [15].
When two or more actuators provide complementary benefits (as in SDs and LMDs), it is not uncommon to resort to hybrid feed drives (HFDs). In HFDs, dissimilar but complementary actuators are synergistically combined to meet conflicting requirements with little or no tradeoff. HFDs are most commonly designed with actuators that act in series to achieve long-range coarse motion and short-range fine motion, thus improving positioning speed and precision [19]–[24]. A relatively uncommon configuration of HFDs is the parallel HFD, where two dissimilar actuators are coupled together in parallel. For example, Shinno et al. [25] developed a tilting platform consisting of a pneumatic actuator and a couple of voice coil motors, in order to simultaneously generate high-precision and high-torque motions. Frey et al. [26] proposed a parallel HFD consisting of an SD and an LMD, which was controlled to actively damp the axial vibration of the SD. Okwudire and Rodgers [27] proposed a parallel HFD which synergistically combined an LMD and an SD to achieve speeds and accuracies similar to LMDs while consuming up to 80% less energy [27], [28]. However, the controller design technique they employed was ad hoc and could not guarantee that the best positioning performance and/or energy efficiency was achieved.
Well-established controller design techniques, like LQR [5] and mixed sensitivity H2/H∞ synthesis [29], can be employed to systematically design energy optimal controllers. Such techniques depend on user-defined weighting functions or matrices which are used to trade off conflicting requirements (e.g., positioning performance and energy efficiency) [5], [29], [30]. However, the methods do not provide a clear means of
Energy-efficient Controller Design for a Redundantly-actuated Hybrid Feed Drive with
Application to Machining
Molong Duan, Student Member, IEEE, Chinedum E. Okwudire, Member, IEEE
F
1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TM
ensbessystradesperredneatrafeeconeffandeffeneCoSetecwo
A. O
Mtwporatdriachconcutconandtharapits
Fi
Fis mosupbetHFencmo
froRo
MECH-02-2015
suring that the st tradeoff, espstems, like HF
adeoff. This pasigning a conrformance whdundantly-actuar energy op
acking; it also edback gain stntroller syntheficiency. Sectiod presents a mficiency. In ergy-efficient
omparative simction IV to e
chnique, followork.
II. OVERVIEW
Overview of Hy
Machining opeo modes – rapisitioning movtes and large cuive the machinehieve very hignsumption; (ii)tting to achievnsumption; (iiid errors introduat the switch bpidly and energtravel.
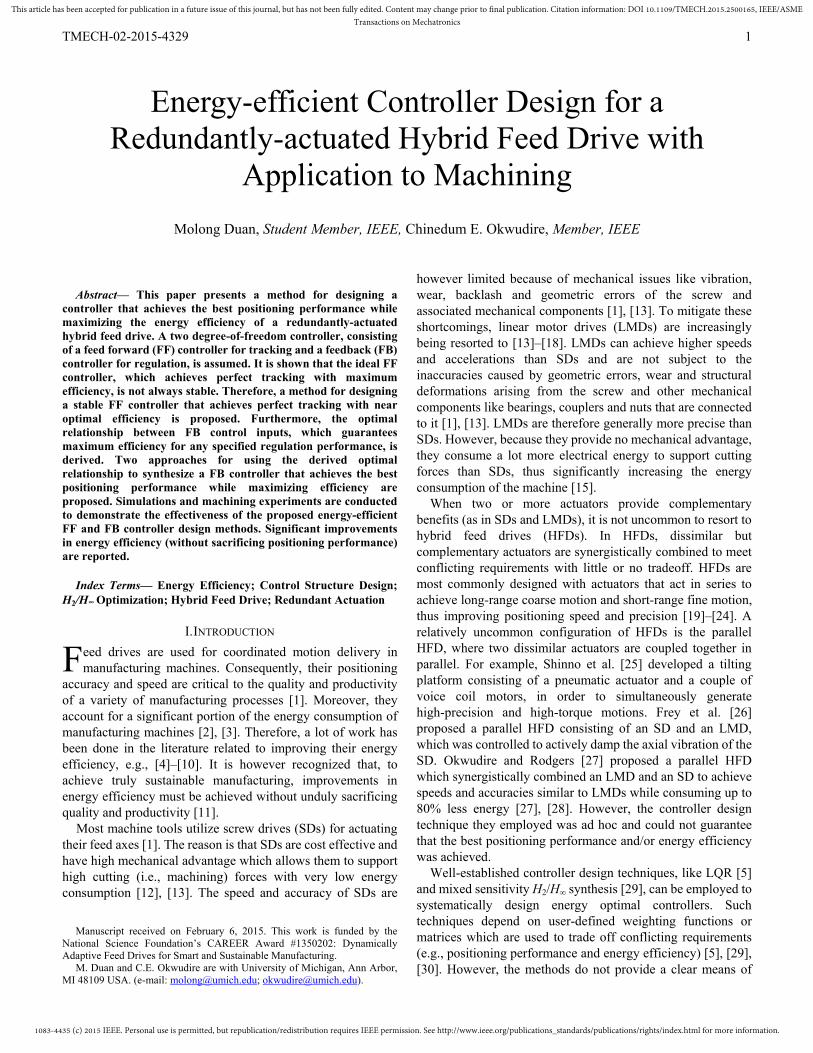
g. 1. Schematic of
Fig. 1 shows thdetailed by Ok
otor is employepport large cutter suited. TheFD is equippecoder fixed to ootor-mounted oTo facilitate ea
om the table, a toh’lix®) nut [31
5-4329
selected weighpecially when aDs, for which aper presents ntroller that a
hile maximizinuated parallel Hptimal feed fo
proposes a mtructure (or weesis in order on II gives a br
model for its loSection III,
controller desimulations and evaluate the ewed by discus
W AND MODELI
Hybrid Feed Dr
erations typicalid traverse (i.e.es) and cuttin
utting forces. Te table using th
gh speeds and ) drive the tabe the required i) use the LMDuced by the SDbetween the Lgy efficiently at
f HFD Prototype P
he schematic ofkwudire and R
ed to drive the tutting forces foe SD is driven
ed with a 0.08one side of the optical rotary easy engagementraction drive S1], [32] is emp
hting filters/maapplied to reduit is desired toa systematic achieves the ng the energyHFD. Specificaforward contromeans of deteeighting filter)
to achieve mrief overview o
ow-order dynam, details of ign methodolo
experiments effectiveness ssions, conclu
ING OF HYBRID
ive (HFD)
lly consist of ., high-speed, z
ng, usually invhe idea behindhe LMD during
accelerations ble using a lowcutting speedsD to compens
D during cuttinLMD and SD t any position o
Proposed by Okwu
f a HFD prototyRogers [27]. Atable, because ior which iron
n by a brushles8 μm resolutitable, and a 15
encoder. nt and disengagSD which uses loyed. The Ro
atrices provide undantly-actuao have little or methodology best position
y efficiency ofally, it proposeoller for perfrmining the b to use in H2/
maximum enerof a parallel Hmics and actuaf the proposogy are provid
are reported of the propos
usions and futu
D FEED DRIVE
a combinationzero-cutting-fovolving low fed the HFD is to:g rapid traversewith low ener
w-lead SD durs with low enerate for vibratio
ng; and (iv) ensucan be achiev
of the table wit
udire and Rogers [1
ype whose desAn air core linit does not need
core motors ss DC motor. Ton optical lin
57 μrad resolut
gement of the a rolling helix h’lix nut conve
the ated
no for ing f a
es a fect best /H∞ rgy FD
ator sed
ded. in
sed ure
n of orce eed : (i) e to rgy ing rgy ons ure ved hin
10]
ign near d to are
The near ion
SD (or
erts
rotary mbearingsmooth designebetweenspring-lsmooth toggle mnut usinhas twodisengacutting mSD andThis pacontrol mode.
B. Mode
A simthe HFdynamimore ad[37]), thit capturknown t[36]. Thdynamimodel uanalysis
In the(equivaof the Hdampinx1, x2 andampinthe (equmotors,(e.g., nom2, resp
m
m
Defininmatrix,d2}
T, anderived
where
motion to lings that trace a
shaft of 25 med to carry up tn the nut and loaded halves
shaft from thmechanism is dng a pair of fasto modes – (i) taged from the smode, when th
d LMD to workaper is focused
effort allocatio
eling of HFD D
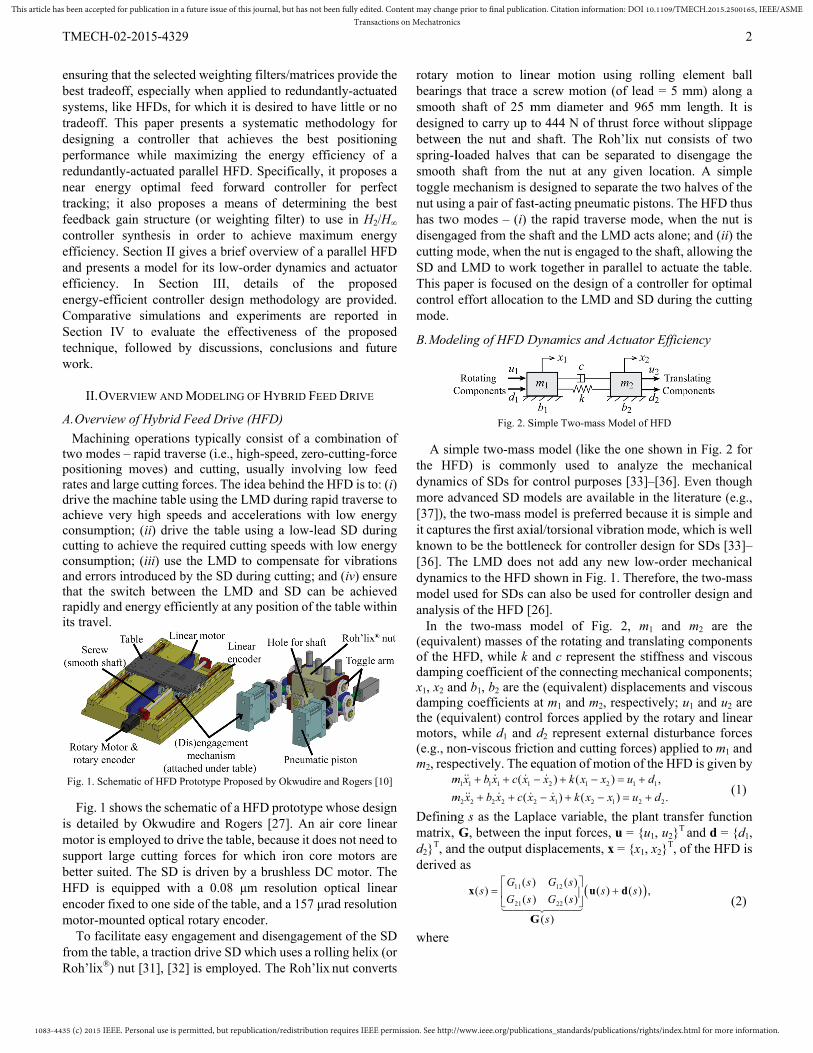
Fig. 2. S
mple two-massFD) is commcs of SDs for dvanced SD mhe two-mass mres the first axito be the bottlehe LMD does cs to the HFD used for SDs cs of the HFD [2e two-mass m
alent) masses oHFD, while k ang coefficient ond b1, b2 are th
ng coefficients uivalent) contr, while d1 and on-viscous fricpectively. The e
1 1 1 1 1
2 2 2 2
(
(
m x b x c x
m x b x c x
ng s as the LapG, between th
nd the output did as
11
21
( )( )
( )
G ss
G s
x
G
near motion uscrew motion mm diameter to 444 N of thrshaft. The Rothat can be s
he nut at any designed to sept-acting pneumthe rapid traveshaft and the Lhe nut is engagek together in pon the design
on to the LMD
Dynamics and A
Simple Two-mass M
s model (like thmonly used to
control purposmodels are avaimodel is preferrial/torsional vibeneck for contrnot add any nshown in Fig.
can also be use26]. model of Figf the rotating aand c represen
of the connectinhe (equivalent)
at m1 and m2, rol forces appli
d2 represent ection and cuttinequation of mo
2 1 2
2 1 2
) (
) (
x k x x
x x k x x
place variable, he input forcesisplacements, x
12
22
) ( )( )
) ( )
( )
G ss
G s
s
u
G
using rolling e(of lead = 5 mand 965 mm rust force withoh’lix nut conseparated to di
given locatioparate the two h
matic pistons. Terse mode, wh
LMD acts aloneed to the shaft,
parallel to actuaof a controller
D and SD durin
Actuator Effici
Model of HFD
he one shown analyze the ses [33]–[36]. Eilable in the litred because it ibration mode, wroller design fonew low-order1. Therefore, t
ed for controlle
g. 2, m1 and and translating nt the stiffness ng mechanical displacementsrespectively; u
ied by the rotarexternal disturbng forces) appliotion of the HFD2 1 1
1 2 2
) ,
) .
u d
x u d
the plant trans, u = {u1, u2}
T
x = {x1, x2}T, o
) ( ) ,s d
2
element ball mm) along a length. It is
hout slippage nsists of two isengage the
on. A simple halves of the
The HFD thus en the nut is
e; and (ii) the allowing the
ate the table. r for optimal
ng the cutting
iency
in Fig. 2 for mechanical
Even though erature (e.g., is simple and which is well
for SDs [33]–r mechanical the two-mass er design and
m2 are the components and viscous
components; s and viscous u1 and u2 are ry and linear bance forces ied to m1 and D is given by
(1)
sfer function and d = {d1,
of the HFD is
(2)

1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TM
G
G
a
a
advswthethetypgenact
Ththeshetheeffmomoto Nthe
Itwforfocconstrutakthewefeedetbasand
(
(
TspeperThshothamuposel
MECH-02-2015
22
11
12 21
,4 1
1 2
2 ,3
,2
;
ol
ol
ol ol
ol
m s cG
D
cs kG G
c b b
D
a m m a
a
The energy effversely affecte
witching losses ese loss mechane most dominapical in machinnerated as a retuator efficienc
he parameter Km
e ith actuator ineets of electric e motor constficiency of eacore efficient theotors is typicallN/√Wusing ae screw in mete
III. PROPOSED H
In motion contro degree-of-frrward (FF) andcuses on tracntroller handlucture for the H
kes the desired e FF componenell as the referedback controltermines the fsed on the errod Cfb such that(a) The best po
stability con(b) Specificatio
as possibleactuators).
The underlyinecifications aborformance typi
herefore, as mould not be saat, because of tultiple combinsitioning perfolected. An eleg
5-4329
222
4,4
1 2 2 1
1 2
3
,
,
l
ol ol
b s kG
kD a s
b m m
m m b
b
k
ficiency of eleced by copper lin the motors nisms, copper lant, especiallyning. Thereforeesult of coppercy. It is given b
2
1
iheat
i mi
uE
K
mi represents thn N/√W. It is of
motors. Givenant provides a
ch actuator; thee motor. Note tly provided in u
a factor of 2π/lers.
HFD CONTROL
rol applicationseedom (DOF) d feedback (FBcking referencles regulationHFD is shown position trajecnt, uff = {uff1 uf
rence position ler. On the othfeedback compr vector, e = xr
: ositioning perfonstraints; and on (a) above ise (i.e., with
ng assumptionove is that, in pically takes premuch as possacrificed for enthe redundant ations of u1 an
ormance; of thoant methodolo
21 1
3 2,3 ,2
1 2
1 2 1, 1 ;
ol
ol ol
ol
m s c b
D
a s a s
c m m
b b ba
ctric motors (liosses, iron losand their ampllosses (i.e., I2R
y at high loade, in this paperr losses is usedby the equation
2
i
dt
.
he (equivalent) ften reported inn the same RMa measure of e larger the mohat the motor cunits of Nm/√Wl, where l repre
LLER DESIGN M
s, it is commonstructure, con
B) controller. Tce commands
n tasks. The in Fig. 3. The Ftory xd as its in
uff2}T, of the co
signal, xr = {xher hand, the Fponent, ufb = − x. It is of int
formance is ach
s achieved as eminimal heat
n in definingprecision machecedence over esible, positionnergy efficiencactuation of thnd u2 that can ose, the most egy for achievin
,1
2
,
;
.
ol
s k
b k
a s
(
inear or rotarysses, friction, alifiers [2][10].
R losses) are by ds [2], which r, the heat enerd as a measuren [5]–[10]
(
motor constantn the specificatS actuation forthe comparat
otor constant, constant for rotW; it is converesents the lead
METHODOLOGY
n to use a so-calnsisting of a feThe FF controls while the
2-DOF contFF controller, C
nput and generaontrol signal u,xr1 xr2}
T, forFB controller, C{ufb1 ufb2}
T, oferest to design
hieved, subject
energy efficient loss from
g the two-tierining, positionenergy efficiening performancy. It is assumhe HFD, there
achieve the bfficient should
ng the stated go
3)
) is and Of far are rgy
e of
4)
t of ion rce, tive the ary
rted d of
Y
lled eed ller FB trol Cff, ates , as the
Cfb, f u Cff
t to
ntly the
red ing
ncy. nce
med are
best d be oals
by proptwo sub
Fi
A. Desig
Let uufb = 0desired time). Tof the tamotor sdefine xthat the x2 = xr2
modeledholds tr
1r
d
d
x
x
x
The opfunctiontime.
The mminimiz
which rHFD bvariatio
where κconstrai
Accordi
perly designingbsections.
ig. 3. Block Diagra
gn of Energy-ef
us consider the such that u = position trajec
The best FF poable, x2, to perfshaft position, xr2 = xd as the re perfect trackin
= xd. Assumind by its two-mrue under perfe
11 12
21 22
21 1 22d ff
G G
G G
G u G u
perator δ reprnal [38]; δxd =
most energy efze objective fu
1
1
ff
m
u
K
represents the based on (4). on is zero [38];
1
21
2 2
1
2 ffff
m
ff
ff
uu
K
u
u
κ = Km1/Km2. Cint of (5) gives
2 11 22
2 122
ff
ff
u G
G G
ingly, xr1 is giv
g Cff and Cfb is
am of Two-DOF C
efficient FF Con
tracking probluff. The machctory xd(t) to f
ositioning perfofectly track xd, ix1, needs not feference commng constraint bng that the HFDmass model, Gect tracking:
1
2
2 21 1
.ff
ff
ff ff
u
u
u G u
resents the va= 0 because xd
fficient FF conunctional
2 2
1 2
1 2
ff
m
ud
K
heat dissipateThe functionai.e.,
21 22
2
1
2
2
,
ffff ff
m
ff
ff
uu
K
u
u
Combining (7)s the energy op
21 2 2
221 22
,
.
ff ffG u u G
G G
ven by
s proposed in th
Control Structure f
ntroller
em, where d isine tool is profollow (whereormance is fori.e., xd −x2 = 0.follow xd. Accmand to the HFboils down to tD’s dynamics
G, the followin
22 2 0.ffG u
ariation of a d is a specified
ntroller must ge
,dt
ed in both actual is minimiz
0dt
) with the perfptimal FF contr
1 ; ff dG x
3
he following
for HFD
s ignored and vided with a t represents
r the position Note that the ordingly, we
FD’s table, so the condition is accurately ng condition
(5)
function or d function of
enerate uff to
(6)
uators of the ed when its
(7)
fect tracking rol law as
(8)

1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TMECH-02-2015-4329 4
1 11 1 12 2
2 1 111 22 21 12 .
r ff ff
ff d
x G u G u
G G G G G x
(9)
One major challenge that arises with the energy optimal FF controller (given by (8)) is that, even though each element of G is minimum phase, the transfer function Gff may have non-minimum phase (NMP) zeros, as such, it may not have a stable inverse. There are several methods in the literature for calculating a stable approximation for the inverse for a transfer function with NMP zeros (e.g., [39]–[41]). Amongst them, the most notable is Tomizuka’s zero phase error tracking control (ZPETC) [39]. ZPETC determines a stable inverse such that there are no errors in phase across all frequencies; however, it gives rise to errors in gain compared to the exact inverse. If the numerator and denominator polynomials of Gff are represented by Bff and Aff, respectively, its stable inverse with zero phase error is given by
12
( ) ( ),
( ) (0)ff ff u
ff zpetcffs ffu
A s B sG
B s B
(10)
where Bffs and Bffu represent the stable and unstable portions of Bff. Note that (10) represents the continuous-time equivalent of Tomizuka’s discrete-time ZPETC [39].
The problem with the approximate inverse of (10) is that it sacrifices energy optimality as well as perfect tracking because it satisfies neither (5) nor (7); this is also the case for the other similar approximate inversion methods available in the literature (e.g., [40], [41]). We therefore seek a minimum phase approximation for Gff that can guarantee perfect tracking while maintaining near energy optimality. To determine such a near energy optimal (NEO) FF controller, let the minimum energy condition of (7) be re-written as
2 12
1 2
,ff ffff
ff ff
u uK
u u
(11)
where Kff is a gain. The implication of (11) is that energy optimality is sacrificed by making the variation of the energy functional in (7) to be non-zero by introducing Kff. Combining the perfect tracking constraint of (5) with (11), we get
2 1 11 22 21 2 2
2 1 221 22 21 22
, ;
.
ff ff ff ff ff neo d
ff neo ff
u K G G u u G x
G G K G G G
(12)
It can be shown that there always exists a Kff œ [0, ∞) that makes Gff−neo to be minimum phase. To do this, let us re-write Gff−neo as
1 2 2 222 22 21 21 22 .ff neo ffG G G G K G G
(13)
Therefore, the zeros of Gff−neo can be obtained from the the roots of the polynomial
2 2 222 21 21 22num num num ,ffG G K G G (14)
where num is a function that returns the numerator of the transfer function in its argument. Notice that (14) is in the standard form for root locus analysis. When Kff = 0, the zeros of Gff−neo are the same as those of Gff. However, as Kff →∞, the zeros of Gff−neo approach the zeros of G22G21 which, according to (3), are always minimum phase. Since the objective functional of (6) is quadratic, near optimality is achieved by selecting the smallest value of Kff that makes the poles of
G−1ff−neo stable, and provides sufficient damping to prevent
ringing due to poorly damped poles [39]. Note that if Gff is minimum phase, Kff = 0 becomes the default solution for Kff, in which case Gff−neo equals Gff, which is the energy optimal solution. Given Kff, xr1 can be calculated as
1 11 1 12 2
2 1 111 22 21 12 .
r ff ff
ff ff neo d
x G u G u
G K G G G G x
(15)
B. Design of Energy-efficient FB Controller
For the regulation problem, xr and uff are ignored such that u = ufb can be written as
,fb u Kz (16)
where z is the extended state vector of the HFD defined as
T
2 1 2 1 2 2 2; .i ix x x x x x x dt z (17)
Observe that z contains all four states of the two-mass model of the HFD, plus an additional state, x2i, representing the integral of the table’s position signal, added to ensure zero steady-state regulation of the table’s position. Let us assume that K is a full state FB matrix which can be expressed as
11 12 13 14 15
21 22 23 24 25
,K K K K K
K K K K K
K (18)
where K11…K25 are its gains. This means that the general form of Cfb, indicated in Fig. 3, can be written as
12 14 11 13 15
22 24 21 23 25
( ) .fb
K K s K s K K ss
K K s K s K K s
C (19)
In the rest of this section, we will show that there always exists some redundancy in the general form of Cfb, in terms of achieving the best FB positioning performance. We therefore propose a systematic method for using the available redundancy to maximize actuator efficiency without sacrificing positioning performance.
1) Redundancy in Achieving Best Positioning Performance
Recall that it is the precise positioning of the table (i.e., x2) that is of primary concern for the HFD. Therefore, the goal of the FB controller is to minimize the effect of disturbance d on e2. This objective can be written as
min s.t. stability constraints,e dJ W S (20)
where ║·║ represents a suitable norm (e.g., H2 or H∞), We is a scalar weighting function of s that indicates the frequencies in e2 that are of utmost importance, and Sd is defined as a scaled version of the closed loop (CL) disturbance transfer function from d to e2, given by the expression
10 1 ,d fb d
S I GC GW (21)
where I is the identity matrix and Wd = diag({d1,max, d2,max}) is a matrix that scales d1 and d2 by their respective maximum values, d1,max and d2,max, so that their magnitudes are comparable when calculating the norm of (20) [29].
Let J* represent the minimum value of J obtained using the full state (i.e., unstructured) FB matrix K of (18); it represents the best positioning performance that can be achieved using Cfb defined in (19). The corresponding optimal CL disturbance transfer function, Sd
*, can be expressed as

1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TMECH-02-2015-4329 5
T* *24 22 1,max
**
2 * *1 1 14 12 2,max
* * 5 * 4 * 3 * 2 * *,5 ,4 ,3 ,2 ,1 ,0
1;
.
dcl
cl cl cl cl cl cl cl
s c K s k K d
D s m s b c K s k K d
D a s a s a s a s a s a
S
(22)
The coefficients of D*cl are functions of K*
11…K*25 and the
plant parameters; their expressions are given in the Appendix. Note that the asterisk attached to the gains indicates that they are the optimal gains. A sufficient (but not necessary) condition to achieve J*, irrespective of the type of norm or weighting function (We) used in (20), is to match the numerator and denominator coefficients of Sd
*. Matching these coefficients mathematically means that the gain matrix K, with 10 degrees of freedom (i.e., 10 gains to be determined), should satisfy 9 linear/bilinear equations; 4 for the numerators of Sd
* and 5 for their common denominator. Therefore, at least 1 gain in K is redundant.
In practice, it is not uncommon for the condition d1,max << d2,max to hold. This is because d1 is primarily the result of Coulomb friction in the bearings of the rotary motor, which is often of much smaller magnitude than the largest cutting force magnitude associated with d2. Even when the Coulomb friction of the bearings is non-negligible, it can be measured and cancelled out reliably through feed forward friction compensation so that the FB controller does not have to deal with it. One can therefore conveniently consider d1,max ≈ 0, such that Sd
* is reduced to a scalar transfer function which can be matched using 7 gains. This leaves at least 3 redundant gains to achieve J*.
2) Use of Redundant Gains for Optimizing Efficiency
The set of all FB control inputs, ufb, that yield the same e2 under the influence of a given disturbance input, d, must satisfy the relationship
2 21 1 1 22 2 2
21 1 22 2 0.
fb fb
fb fb
x G u d G u d
G u G u
(23)
where δd1 = δd2 = δx2 = 0 because they are each specified, even if unknown, functions of time. Also, the most efficient control inputs must minimize the energy functional,
2 2
1 2 1 21 22 2
1 2 1 2
0.fb fb fb fbfb fb
m m m m
u u u udt u u
K K K K
(24)
Notice that (23) and (24) are the same constraints expressed for the FF controller in (5) and (7), respectively. Combining (23) and (24) we get
1 2 21
2 22
; .fb
fb
u G
u G (25)
The implication of (25) is that to satisfy a given e2 requirement at maximum efficiency, the control inputs are bound by an optimal transfer function relationship given by β. This result is very powerful and can be used to directly or indirectly determine a FB controller that achieves the best performance, J*, more efficiently than the optimal full state FB controller.
a. Energy-efficient FB Controller Design − Direct Approach
The direct approach seeks to structure K such that (25) is
satisfied (as much as possible) without compromising J*. To do this, note that ufb can be written as
T 1
1 2
,
, ,
fb u
u fb fb dd d
u S d
d S C I GC GW (26)
where 1 2, [ 1, 1]d d represent the scaled values of d1 and d2,
respectively. Combining (26) with (25), we get the relationship that must be satisfied by the elements of the re-structured K in order to maximize efficiency; it is given by
1 2
T T T1 1 2 2 1 2 2 1max
T T T2 1 1 1 2 1 2 2 max
0
0
0
fb fbu u
d
d
K QK p K p K
p K K QK p K
(27)
where
21 1
2 3 22 2
3 2 21 21 1
3 2 4 3 22 2
4 3 2 3 21 1
2
2
2 3
2 3
,
0 1 0 0
1 0 0
,0 0 0
0 0
0 0 0
i i
m s c b s k cs k
cs ks m s c b s ks
m s c b s ks cs ks
cs ks m s c b s ks
m s c b s ks cs ks
s
s s
s s
s s s
s s
K
p p
Q
K T
1 2 3 4 5 1,2 .i i i iK K K K i
(28)
Substituting s = jω into Γ1(s) and Γ2(s) in (27) (where ω represents the frequency content of d), we get a pair of complex-valued equations which are bilinear with respect to the elements of K. The real and imaginary parts of both equations must equal zero at every ω contained in d in order to attain optimal efficiency. Obviously, K may not have enough redundant gains to satisfy the equations for every ω contained in d. Therefore, one can maximize efficiency using the available redundancy by determining the K that minimizes the least-squares objective
H_
stability constraintsmin ( ) ( ) s.t. ,
*ee de d
J j jW J
Γ ΓS
(29)
where Γ = [Γ1(jω), Γ2(jω)]T and the superscript H represents the Hermitian transpose. If needed, the least squares objective in (29) can be weighted to emphasize some frequencies over others.
b. Energy-efficient FB Controller Design − Indirect Approach
The traditional approach for enforcing an energy efficient structure in K is to optimize for energy efficiency with positioning performance constraints; i.e.,
stability constraintsmin s.t. ,
*ee in u ue d
JW J
W S
S (30)
where Su is the transfer function matrix from input d to output ufb as defined in (26), Wu is a diagonal weighting matrix whose elements reflect knowledge about the relative efficiencies of

1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TM
theindthemaindoptstruIn HothesubNodifenfufb
relfordemin
assbeemeconappwitFBHFto duperpap
C. S
assG, conCLzerwitconunassfrefretheAcsysmawit
Mthaby sen
mins
MECH-02-2015
e actuators. Tdicates the knoe same performanner. The weigdirectly determtimization; a pucture for K, wpractice, Wu is
owever, the opeory, by selectib-optimality thotice that the sfference is thatforce (as much1 and ufb2. Onlationship indirces using a monstration ofSection IV. It must be n
sumption of a en made purelyethod for thentrollers). The plied to the deth observers).
B controller desFD described inother HFDs. Tal input, contrrformance defper).
Stability Const
Thus far, only sumed to be ac has been nstraints canno
L system determros, hence the gthout causing nstraints, the -modeled highsume that Ga iequency respoequencies, ω. Le system’s looccording to thestem is stable iakes Np counthout passing tMost often, it at there are suf
confining thnsitivity functi
max at frequenc
stability is likel
5-4329
The addition owledge that themance can beghting matrix, mines the st
poor choice of which cannot as typically chosptimum structuing Wu = diag(hat could be cretup of (30) ist the objective
h as possible) thn the other hairectly by minsuitable norm
f the direct and
noted before static FB contry based on its
e HFD (whicmethods prop
esign of dynamMoreover, eve
sign methods arn Section II, thThe methods arollable and mfined on one
traints and Hig
the low-order ccurately repreconsidered. Not be enforced mined using Ggains of the FBany stability iactual plant
her-order dynamis available in onse function Let Np denote top transfer fue Generalized if and only if t
nter-clockwise the origin. is desired to enfficient marginhe maximum on, S = (I + Lcies above the
ly to occur [29
of the constraere is redundane achieved in Wu, is very imtructure of KWu could lead
attain the best esen by intuitionure for K can([1, β]), therebreated by a pos very similar te in (29) is deshe optimal relaand, (30) enfonimizing the
m of Su, weigindirect appro
leaving this roller in (16) irelevance to thh seeks to a
posed in this semic controllers en though the re presented in
hey can be applare valid as loninimum phaseof its outputs
gher-order Dyn
dynamics of thesented by its Note, howevein (20), (29) o. This is becau controller can ssues [29]. Todynamics Ga,
mics, must be cthe form of a (FRF) measu
the number of unction given Nyquist Theorthe Nyquist cu
encirclement
nforce robust sns of stability. singular value
L)−1, below a spe CL bandwi
9]; i.e.
int related to ncy in K such ta more effici
mportant becausK used in d to a sub-optimenergy efficienn or trial and errn be obtained,by eliminating oor choice of Wto (29). The onsigned to direcationship betweorces the optimfeedback cont
ghted by Wu. oaches is provid
section that is arbitrary. It hhe desired contavoid high-orection can also
(e.g., controllproposed FF athe context of
lied more broang as the plantwith position(e.g., x2 in t
namics
he HFD, whichtwo-mass mod
er, that stabilor (30) based ose G has no NMbe infinitely h
o enforce stabil, which includconsidered. Letplant model oured at discrunstable polesby L = GaC
rem [29], the urve of det(I +s of the ori
stability, mean This is achieves of the pecified threshdth, ωBW, wh
J* that ient se it the
mal ncy. ror. in the
Wu. nly ctly een mal trol
A ded
the has trol der be lers and the dly t is ing this
h is del, lity
on a MP igh lity des t us or a rete s in Cfb. CL L)
gin
ing ved CL old
here
Simusection FB conprototypconstanand Km
convert2π/l, wi328.8, iefficienmass sidentifieFRFs experimFRFs arcritical
F
I
m1 [kg] m2 [kg]
Fig. 5. C
A. Evalu
Simuperform(NEO) Fis not assumedand nodescribeperfect dependiEvaluatreveals located
[ I
IV. SIMU
ulation and exto demonstrate
ntroller design pe of the HFD
nts for its rotary
m2 = 21 N/√Wted from its noith lead l = 5 indicating two
ncies of the twosystem whose ed by curve fitof the two-
mentally measure in good agreaxial/torsional
Fig. 4. HFD Protot
IDENTIFIED PARAM
616.2 b46.3 b
Comparison of Two
uation of FF C
ulations are mance and enerFF control metconsidered ind to be perfec
o disturbances ed, the propos
tracking withing on whetherting Gff using
that it has a at s = 196 ±
1m( )]
BW
j
L
ULATIONS AND E
xperiment resue the effectivenmethods. Fig.
D discussed iny and linear moW , respectiveominal value in
× 10−3 m. Tho orders of mao actuators. Th
parameters, tting measured -mass model ured FRFs (i.e.eement up to 10l mode of the H
type used for Simu
TABLE I METERS OF THE HF
b1 [kg/s] 44b2 [kg/s] 83
o-mass Model with
Controllers usin
conducted torgy efficiency thod proposed in the simulatitly described b
are introduced NEO FF coh near optimr Gff defined in
g the reportedcomplex conj
± 314j. Theref
max .
EXPERIMENTS
ults are preseness of the prop
4 shows an inn Section II.Aotors are Km1 = ely, where Km
n Nm/√W usinherefore, κ2 = (agnitude diffee HFD is modereported in TFRFs. Fig. 5 c(i.e., G(jω)
, Ga(jω)). As s00 Hz, hence GHFD, occurring
ulations and Exper
FD’S TWO-MASS M
4.8 c [kg/3.3 k [N/μ
th Experimentally
ng Simulations
o evaluate thof the near enin Section III.Aions because by its two-mased. Under theontroller is abl
mal or optimaln (8) has NMP d parameters ojugate pair of fore, the gain
6
(31)
nted in this posed FF and n-house built
A. The motor 380.8 N/√W
m1 has been ng a factor of (Km1/Km2)
2 = erence in the eled as a two Table I, are compares the ) with the seen, the two
G captures the g at 41 Hz.
riments
MODEL
/s] 5777.2 μm] 3.1469
Measured FRF
he tracking ergy optimal
A. FB control the plant is ss model, G, e conditions le to achieve l efficiency, zeros or not. of the HFD
f NMP zeros Kff must be

1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TM
selneaas poGff
pofigcom
F
15 1.5andFigombothespe
Ththethaelephbenreq
FtheFFAllNoLMKff moresgivenepoforThvalG−
traranver
MECH-02-2015
lected to ensurar energy optimKff is varied in le pair in G−1
ff
ff−neo) becomes int marked Kff
gure; it represmparative simu
Fig. 6.
For tracking temm, with ki
5×106 mm/s3 and snap, respectg. 7(a); its pos
mitted due to spdy FF (RB FF)e proposed Necifying xr1 = x
ffu G
he implication oe responsibilityat the two-masegant and it guase error FF anchmark becaquirement stipuFig. 7 (b)-(d) ae table, and theF and the propol three contro
otice, however,MD. As a resultf = 1000. In thost efficient. Hsults in undesirves rise to poorergy formulatiorly damped rmulation of (herefore, the onlue of Kff that is−1
ff−neo. Fig. 8 acking the refernging from 30ry high but dro
5-4329
re a stable invmality. Fig. 6 sthe interval [0
ff−neo (correspostable for valu= 1000 has bee
sents a value ulations later in
Root Locus of G−
ests, a desired pinematic limitsnd 5×108 mm/stively, is used.sition, accelerapace limitation) [42] is used aEO FF controxr2 = xd such th
T1d d
mx x
m
of (32) is that iy to move the mss system movuarantees perfeapproximation ause it does nulated for FF coand Table II coe power/heat waosed NEO FF, ollers achieve , that RB FF det, it is 71.5% le
heory, NEO FFHowever, notice
rable ringing orly damped polion of (12) dopoles/zeros (m
(8) misses thenus falls on thes high enough tplots the tota
rence trajectory.3 to 1000. No
ops rapidly as th
verse of Gff−neo
shows the root, ∞). It is foundnding to the Nues of Kff ≥ 30en highlighted
of Kff whichn this section.
−1ff−neo as a Functio
position trajects of 100 mm/s4 for velocity, Its velocity pr
ation, jerk and ns. A FF technas the benchmaoller. RB FF at
21 1
22 2
.d
m s b sx
m s b s
in RB FF eachmass to which ites as one rigidect tracking. N
of (10) is nonot meet the ontrol. ompare the tracasted by each awith Kff = 30.perfect tracki
epends heavily ess efficient thaF with Kff = 30e from the figuof the control sles in G−1
ff−neo. oes not recognmuch like thee effect of NMe controller deto avoid poorlyal heat energyy of Fig. 7(a) uotice that the ehe value of Kff
o while providt locus of G−1
ff−
d that the unstaNMP zero pair0.3. Note that on purpose in
h is utilized
n of Kff
tory, xd, of stro/s, 1×104 mmacceleration, jrofile is shownsnap profiles
nique called riark for evaluatis generated
(3
h actuator is givt is attached, sud body. It is v
Note that the zot selected as
perfect track
cking error (e2)actuator using R3 and Kff = 10ing, as expecton the ineffici
an NEO FF, us0.3 should be ure that Kff = 3signals becauseThe near optim
nize the effecte optimal enerMP poles/zero
esigner to selecy damped polesy of NEO FF using values of energy is initiaf increases and
ing f−neo able r in the the for
oke m/s2,
erk n in are gid ing by
2)
ven uch ery ero the ing
) at RB 00. ted. ient ing the 0.3 e it mal
of rgy os). ct a s in
in f Kff ally the
poles becontinubecomecontinubetween0.03 J.energy(For insslightly that as lin G−1
ff−
Fig. 7. R
COM
MaxH
HeTo
Fig. 8. To
B. Evalu
SimuindirecttransfercontrollunstructThe pra(which assumedoptimizdetermiH∞ normand Pos
Equatiovery lowfrequenenforce
ecome more daues to reduce ases very low aftues until Kff =n the energy atIt must be nothighly depend
stance see the y different deslong as Kff is tu−neo, the energy
Reference VelocitActuator Po
MPARISON OF TRAC
CONTROLLE
x Tracking Error [nHeat Energy SD [J]eat Energy LMD [otal Heat Energy [J
otal Heat Energy oReference T
uation of FB C
ulations are cot, the direct anr function relatiler design. Thetured) state FBactical scenariis the cutting d. MATLAB’s
zation based oine the Sd
* that m. A weightinstlethwaite [29
eW
on (33) represenw frequencies bncies (i.e., freque integral action
amped. For thiss Kff is increaser about Kff =
= 1000 and bt Kff = 1000 andted that the reds on the systAppendix for ired trajectory
uned to providey performance
ty Profile and Comower of FF Contro
TABLE II
CKING ERRORS AND
ERS BASED ON SIM
RB FF
nm] 0.000 ] 3.967 J] 7.398 J] 11.365
of Proposed NEO Trajectory of Fig. 7
Controllers usin
onducted to evnd indirect metionship, β, derie benchmark iB controller dio where d1,max
force limit of s hinfstruct comon a structuredminimizes the
ng function, W] is adopted; it
1
1,
nn
B
nn
B
s M
s A
nts a filter of oby a factor of Muencies much hn. We select n =
s particular cassed but the rate50. The decreaeyond, but thd that at Kff = 1lationship betwem and desirethe energy vs.
y). Nonethelesse sufficiently dremains near o
mparison of Trackiollers (Simulation)
D ENERGY EFFICIE
MULATION RESULTS
NEO FF (Kff = 30.3) (
0.000 27.918 24.358 52.276
FF as a Function o7(a)) – Simulation
ng Simulations
valuate EE dirthods for usingived in Sectionis selected as tdiscussed in Sx = 0 and d2,m
the HFD of Fimmand (which d gain matrix
e objective of (2We, suggested b
t is given by
,
order n, designeM/A comparedhigher than ωB
= 2, M = 2, A =
7
se, the energy e of decrease ase in energy he difference 10,000 is just ween Kff and ed trajectory. Kff plot of a s, it appears
damped poles optimal.
ing Errors and
ENCY OF FF
S
NEO FF (Kff = 1000)
0.000 3.242 0.001 3.243
of Kff (based on
n
rect and EE g the optimal n III.B for FB the full (i.e., ection III.B.
max = 400 N ig. 4 [27]) is performs H∞ ) is used to 20) using the
by Skogestad
(33)
ed to weight d to very high B), so as to = 5 × 10−6 and

1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TMECH-02-2015-4329 8
ωB = 200π rad/s (indicating that we want integral action to taper off beyond 100 Hz).
The HFD is assumed to be perfectly modeled by G, and the table-side disturbance force, d2, is assumed to be a harmonic cutting force at 60 Hz, with an additional DC component; it is given by
2( ) 200 200sin(120 ) [N].d t t (34) However, as discussed in Section III.C, applying the optimization of (20) to G could yield infinitely large gains. Therefore, a 7th order Butterworth low-pass filter, with cutoff frequency of 1000 Hz, is applied to each element of G before carrying out the H∞ optimization in order to have finite stability limits. The default stability settings of MATLAB’s hinfstruct command are maintained for the optimization. The resulting Sd
*(1,2) (scaled by 1/d2,max) is plotted in Fig. 9(a) and the elements of the optimal full state FB gain matrix (i.e., K*) are given in Table III. Note that only Sd
*(1,2) is shown in the figure because Sd(1,1) = 0 based on the assumption that d1,max = 0.
Fig. 9(b) shows the optimal transfer function relationship, β, for the HFD. It requires the magnitude of the ratio ufb1/ufb2 to be 50.3 dB at ω = 0, and to be 23.5 dB at ω = 120π rad/s. In employing β for energy efficiency optimization of K, we have chosen to use Sd
* instead of its infinity norm, J*, as the performance constraint in (29) and (30). This is done in order to ensure that the exact same regulation performance as the optimal full state FB controller is achieved at all frequencies. Therefore, using (22), we derive 7 constraint equations to ensure that the poles and zeros of Sd
*(1,2) are matched with 7 out of the 10 gains of K, leaving us with 3 redundant gains. To obtain the energy efficient controller using the direct method (i.e., EE direct), one of the remaining 3 gains is used to perfectly enforce (27) at ω = 0. In theory, the last two gains could be used to satisfy the real and imaginary parts of (27) at ω = 120π rad/s, but the equations are highly nonlinear and difficult to solve analytically. Therefore, the remaining two gains are used to minimize Jee-d (i.e., (29)) at ω = 120π rad/s. The elements of the resulting gain matrix are given in Table III.
To determine the energy efficient controller using the indirect method (i.e., EE indirect), MATLAB’s hinfstruct command is used to minimize the H∞ norm of (30). A weighting function given by Wu = Wωdiag([1, β]) is selected, where Wω is a weighting filter designed to emphasize frequencies ω = 0 and ω = 120π rad/s contained in d2. It is defined as
2
2 2,
2n
en n
W Ws s
(35)
Note that We is the exact same filter defined in (33); it is used in Wω to place a higher weight on frequencies close to ω = 0. The second-order filter multiplying We is designed with ωn = 120π rad/s and ζ = 8.2×10−6, such that its magnitude at resonance is equal to We(0). The constraint equations that were used to match the poles and zeros of Sd
*(1,2) for the EE direct method are used to structure K within MATLAB’s hinfstruct function so that Sd
*(1,2) is also matched perfectly in EE indirect. The elements of the resulting FB gain matrix are reported in Table III.
Fig. 9(a) compares the magnitudes of Sd(1,2)/d2,max for the
EE direct and EE indirect controllers to the original Sd
*(1,2)/d2,max determined based on the optimal state FB controller; the plots are coincident, indicating that all three methods achieve the best positioning performance at all frequencies. Fig. 9 (c) and (d) respectively compare Su(1,2)/d2,max and Su(2,2)/d2,max for the three methods. Notice that Su(1,2)/Su(2,2) = 50.3 dB for the EE direct controller, meaning that it perfectly matches β at ω = 0. However, at ω = 120π rad/s, it achieves a Su(1,2)/Su(2,2) ratio of 32 dB instead of the 23.5 dB stipulated by β, due to errors in the least squares solution applied at that frequency. The EE indirect controller does not perform as well as the EE direct in terms of matching β. This is because, in determining the gain matrix for the EE indirect controller, the hinfstruct command was initialized with the gain matrix of the optimal full state FB controller (i.e., K*). Comparing the elements of the full state FB controller’s gain matrix to those of the EE indirect controller in Table III, one can conclude that the gradient-based algorithm used in hinfstruct may have gotten stuck in a local minimum close to its initial value, thus preventing it from reaching a better solution. This is a well-known limitation of gradient based methods when performing non-convex optimizations. It could be mitigated by testing various initial values in hopes of finding other local minima. Note that the direct method was also initialized with the elements of the full state FB matrix, when performing the nonlinear least-squares optimization of (29). Therefore, its solution could also get stuck in local minima around its starting point, but it appears from Table III that its gains are quite different from those of the full state FB matrix.
The expression 2 2
2
21 2.max 2.max0 120
1 (2, ) 1 (2, )200 200 ,
2
T Tu u
i mi
i i
K d d
S S
(36)
representing the sum of the average power at ω = 0 and ω = 120π rad/s of each actuator’s steady-state response to d2(t) given in (34), is used to calculate the average power dissipated in heat by each FB controller. The results are shown in Table IV. EE direct and EE indirect are respectively 60% and 33% more efficient than the full state FB method. Fig. 10 compares the ratio of the average power of the EE direct and EE indirect based controllers, relative to that of the full state FB controller, using a disturbance input of d2(t) = sin(2πft). The EE direct controller is much more efficient than the full controller from f = 0 through f = 44 Hz, after which it becomes less efficient. Note that its relative efficiency is 8 dB worse at f = 60 Hz, due to the aforementioned errors in the least square solution. The EE indirect controller, on the other hand, is more efficient than the full controller at all frequencies, but only by a very small (0.6 dB) margin (except at f = 0 and f = 60 Hz where it shows slightly better relative efficiencies of 4.2 dB and 0.8 dB, respectively).

1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TM
CO
F
F
F
FigStat
F
C. M
Mperdespro402slokey36matrajmmof At conandComa
MECH-02-2015
OMPARISON OF ELE
FULL STATE FB, E
Full State FB −8
EE direct +9EE indirect −4
Full State FB −2.
EE direct −5EE indirect −2.
g. 9. Comparison ote FB and the Ener
and
COMPARISON OF E
Average PowerDissipated in He
SD [W] LMD [W] Total [W]
Fig. 10. ComparisoDirect and EE Ind
Machining Exp
Machining exrformance andsign methodsototype of Fig. 20 3-axis milli
ot in an AISI 1y cutting param00 rpm (i.e., aintain a reasoajectory, xd, is pm/min (i.e., 5 m62.5 mm/s2, 3such low spe
ntributions of d are indisting
onsequently, thachining tests.
5-4329
TABL
EMENTS OF FB GA
EE DIRECT AND EE
K11 K12 .2×105 −3.1×106
.2×105 −3.1×106
.5×105 −3.1×106
K21 K22 4×1010 +4.2×107
.2×107 −7.6×104
3×1010 +7.0×107
of Positioning Perfrgy-efficient FB Cd EE Indirect App
TABL
ENERGY EFFICIEN
EQUATION (36)
r eat
Full State FB
1.3381.8383.1
on of Efficiencies direct Methods (Re
Controller) –
periments
xperiments ard energy efficie. To perform4 is mounted o
ing machine to018 steel workmeters for the60 Hz) is selonable feed pprescribed to tramm/s), with ac125 mm/s3 and
eeds and accelRB FF and NEguishable fromhe effect of
LE III AIN MATRICES CAL
E INDIRECT METHO
K13 6 −3.1×108 −56 +3.8×109 −56 −1.8×108 −5
K23 7 +5.2×107 +94 +1.1×108 −87 +6.8×107 +1
formance and ConControllers designeproaches (Simulatio
LE IV
NCY OF FB CONTRO
) (SIMULATION)
B EE direct
36 125.8080 26.31
6 152.11
of Controllers deselative to Efficienc– Simulation
e conducted ency of the pro
m the experimon the x axis ofo cut a 15 mm kpiece. Table Ve operation. A ected for the
per tooth, the avel at a maximcceleration, jerd 6.25×105 mmerations, the thEO FF are neg
m noise in theFF is not co
LCULATED USING T
ODS (SIMULATION
K14 K15 5.8×103 −9.3×105.8×103 +8.5×105.8×103 −6.2×10
K24 K25 9.5×104 +1.6×108.9×101 +1.6×101.3×105 +1.6×10
ntrol Effort of the Fed using the EE Dion)
OLLERS BASED ON
EE indirect
0 0.511 254.441 254.95
signed using the EEcy of Full State FB
to evaluate oposed controlments, the Hf a FADAL VMlong, 1 mm de
V summarizes spindle speedcutting tests. desired posit
mum speed of 3rk and snap limm/s4, respectiveheoretical energligible (< 6 me control signaonsidered in
THE
N)
05 06 05
05 05 05
Full irect
N
E
B
the ller FD
MC eep the
d of To ion 300 mits ely. rgy
mJ), als. the
SpindlTool NumbFeed pFeed rLubric
The
optimizplant dfriction easily cassumedplaced aFig. 5)appearinRobust maximufrequen
2.65. MAT
simulatioptimizis givenfunctionOptimizout the HreportedFB gain
Feed harmonTherefosame prconstraigains ar120π raindirectthe optimits initia(22), foreportedindirect
COMPAR
FULL S
Full StaEE D
EE Ind
Full StaEE D
EE Ind
Fig.
direct ausing th
le speed
er of flutes per tooth rate cation
optimal full zing the H∞ nordynamics, Ga(j
in the bearingcancelled by feed, and d2,max at the 847 Hz , and at the ng in Ga(2,2)
stability conum singular vncies higher th
TLAB’s hinfstrions, could n
zation in (20) un as a FRF atn modeled in zation (PSO) TH∞ optimizatiod in [44]. The en matrix are proforces in milli
nics at the spinore, for the EErocedure as useined to match re used for enf
ad/s, representint method, MATmization of (30al values; cons
ollowing the exd in Section t controllers are
RISON OF ELEMENT
STATE FB, EE DIRE
K11
ate FB 4.65×107
Direct 5.48×107
direct 4.80×107
K21 ate FB 1.52×107
Direct 2.54×106
direct 6.16×106
11(a) compareand EE indireche full state FB
TABLE V
CUTTING PARAME
3600 r3/8” di4 0.02 m300 mNone
state FB corm of (20) with(jω), substitutegs of the rotaryed forward actis selected as resonance pea400 Hz and in order to i
nstraints are evalues of the
han ωBW = 628
truct commandnot be employusing Ga insteat discrete freqs-domain. Th
Toolbox in MAon, based on a telements of theovided in Tabling typically handle and toothE direct controed in Section IVSd
*(1,2) usingforcing the β cng the lowest hTLAB’s PSO t0) based on Ga
straints are addxact same procIV.B. The gae reported in T
TABLE VI TS OF FB GAIN MA
ECT AND EE INDIR
K12 7 4.92×105 1.07 4.92×105 8.97 4.92×105 8.5
K22 7 6.15×105 1.06 1.59×105 1.6 1.57×104 1.0
es Sd(1,2)/d2,m
ct controllers toB controller. A
ETERS
rpm ia. HSS end mill
mm/tooth mm/min
ontroller is dh the actual (i.eed for G. Th
y motor is smaltion. Therefore
400 N. Notcak appearing in487 Hz reson
increase stabilenforced by e sensitivity f8 rad/s (100 H
d, which was yed for carryad of G. This isquencies, not aherefore, a ParATLAB [43] is utechnique simile resulting optimle VI. ave a DC portioh passing frequoller, we folloV.B. The eleme
g (22), and the constraint at ωharmonic in d2
toolbox is used, with the elem
ded to match Sedure as in the
ains of the EETable VI.
ATRICES CALCULA
RECT METHODS (E
K13 K14
06×108 1.29×1090×107 1.29×1057×107 1.29×10K23 K24
02×107 4.85×1012×107 1.02×1006×107 -4.25×10
ax generated uo Sd
*(1,2)/d2,m
An almost perf
9
designed by e., measured) he Coulomb ll and can be
e, d1,max = 0 is ch filters are n Ga(1,1) (in nance peaks lity margins. limiting the function for Hz) to max =
used in the ying out the s because Ga as a transfer rticle Swarm used to carry lar to the one mal full state
on, as well as uencies [45]. ow the exact ents of K are 3 redundant = 0 and ω = . For the EE
d to carry out ments of K* as Sd
*(1,2) using e simulations E direct and
ATED USING THE
EXPERIMENTS)
K15
04 6.50×105 04 5.93×105 04 5.46×105
K25 02 4.30×104 03 4.30×104 01 4.30×104
using the EE ax, generated fect match is
1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TM
obtthrmathr
2.6resthrbeein β cdBobtdirtheThconat icon2.8andeff
FEf
F
Fig
con
MECH-02-2015
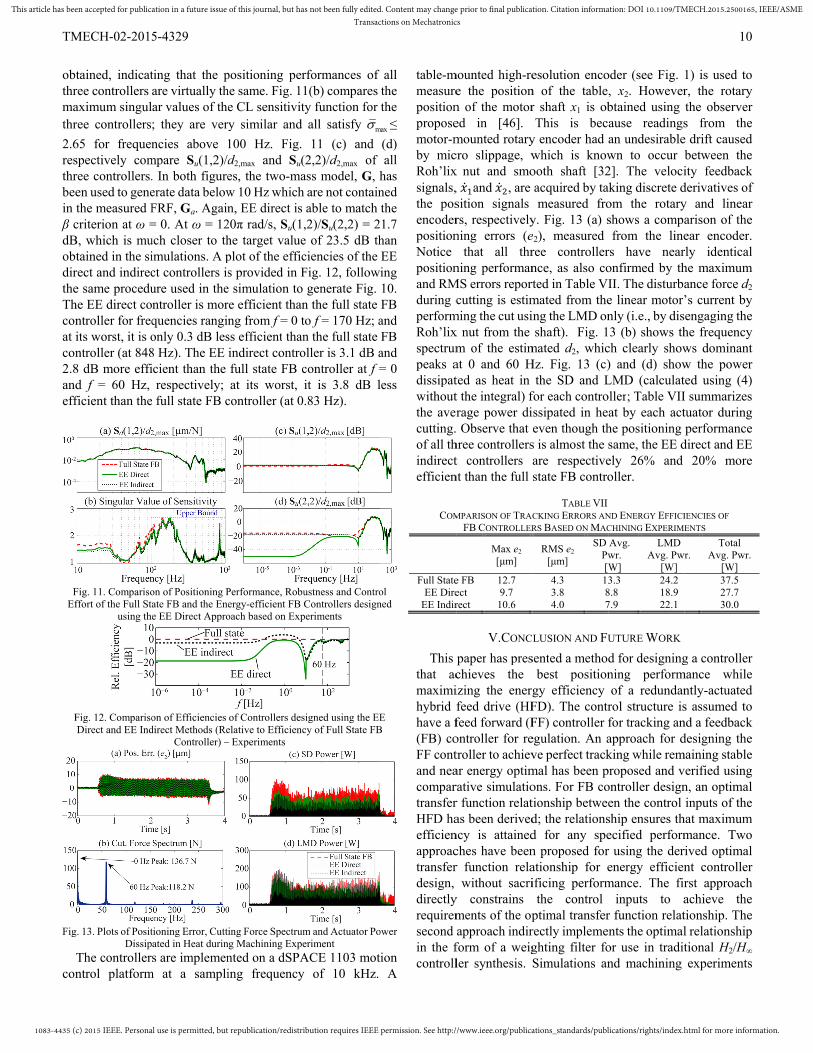
tained, indicatree controllers aximum singulree controllers
65 for frequenspectively comree controllers.en used to genethe measured Fcriterion at ω =
B, which is mutained in the sirect and indirece same proceduhe EE direct controller for freqits worst, it is ontroller (at 8488 dB more effid f = 60 Hz, ficient than the
Fig. 11. Comparisoffort of the Full Sta
using the
Fig. 12. ComparisoDirect and EE Ind
g. 13. Plots of PositDissip
The controllerntrol platform
5-4329
ting that the pare virtually thar values of the; they are ver
ncies above 1mpare Su(1,2)/d. In both figureerate data belowFRF, Ga. Again= 0. At ω = 12uch closer to thimulations. A pct controllers isure used in thentroller is morquencies ranginonly 0.3 dB les8 Hz). The EE icient than the
respectively; full state FB c
on of Positioning Pate FB and the Enee EE Direct Appro
on of Efficiencies direct Methods (Re
Controller) –
tioning Error, Cuttiated in Heat durin
s are implemenm at a sampli
positioning perhe same. Fig. 11e CL sensitivity similar and
100 Hz. Fig. d2,max and Su(es, the two-maw 10 Hz whichn, EE direct is
20π rad/s, Su(1,he target valueplot of the effics provided in F
e simulation to re efficient thanng from f = 0 tss efficient thanindirect controfull state FB cat its worst,
controller (at 0
Performance, Robuergy-efficient FB Coach based on Exp
of Controllers deselative to Efficienc– Experiments
ing Force Spectrumng Machining Expe
nted on a dSPAing frequency
rformances of 1(b) compares ty function for
all satisfy m11 (c) and
(2,2)/d2,max ofass model, G, h are not containable to match ,2)/Su(2,2) = 2e of 23.5 dB thciencies of the Fig. 12, followgenerate Fig.
n the full state to f = 170 Hz; an the full state oller is 3.1 dB acontroller at f =it is 3.8 dB l.83 Hz).
ustness and ControControllers design
periments
signed using the EEcy of Full State FB
m and Actuator Poeriment
ACE 1103 moty of 10 kHz.
all the the
max ≤
(d) all
has ned the 1.7 han EE ing 10. FB and FB and = 0 less
ol ned
E B
ower
ion A
table-mmeasurepositionproposemotor-mby micRoh’lixsignals,the posencoderpositionNotice positionand RMduring cperformRoh’lixspectrumpeaks adissipatwithoutthe avercutting.of all thindirectefficien
COM
Full StateEE Dire
EE Indir
This that acmaximihybrid fhave a f(FB) coFF contand neacompartransferHFD haefficienapproactransferdesign, directlyrequiremsecond in the fcontroll
mounted high-ree the positionn of the motored in [46]. mounted rotarycro slippage, wx nut and smo, and , aresition signals rs, respectivelyning errors (e
that all thrning performan
MS errors reportcutting is estim
ming the cut usix nut from the m of the estimat 0 and 60 Hted as heat in t the integral) frage power di Observe that
hree controllerst controllers nt than the full
MPARISON OF TRAC
FB CONTROLLER
Max e2 [μm]
e FB 12.7 ect 9.7 rect 10.6
V. CONC
paper has preschieves theizing the energfeed drive (HFfeed forward (Fontroller for retroller to achievar energy optimrative simulatior function relatas been derivedncy is attainedches have beenr function rela
without sacriy constrains ments of the opapproach indirform of a weigler synthesis.
esolution encon of the tabler shaft x1 is obThis is bec
y encoder had which is knowooth shaft [32acquired by tameasured fro
y. Fig. 13 (a) se2), measured ree controllernce, as also corted in Table VImated from theing the LMD onshaft). Fig. 1
mated d2, whicHz. Fig. 13 (c)
the SD and Lfor each controissipated in heeven though ths is almost the sare respectivestate FB contro
TABLE VII CKING ERRORS AN
RS BASED ON MAC
RMS e2 [μm]
SD Pw [W
4.3 133.8 84.0 7
LUSION AND FU
sented a methodbest position
gy efficiency FD). The contrFF) controller fegulation. An ave perfect trackmal has been pons. For FB cotionship betweed; the relationsd for any spen proposed forationship for eificing performthe control
ptimal transferrectly implemeghting filter foSimulations an
oder (see Fig. , x2. Howeverbtained using ause readingsan undesirablewn to occur 2]. The velociaking discrete dom the rotaryshows a compafrom the line
rs have nearonfirmed by thII. The disturbae linear motor’nly (i.e., by dis3 (b) shows th
ch clearly show) and (d) showLMD (calculatoller; Table VIIat by each acthe positioning same, the EE dely 26% and oller.
ND ENERGY EFFICI
CHINING EXPERIME
Avg. wr. W]
LMD Avg. Pw
[W] 3.3 24.2
8.8 18.9 7.9 22.1
UTURE WORK
d for designingning performof a redundanrol structure isfor tracking anapproach for dking while remproposed and vontroller designen the control ship ensures thecified performr using the derenergy efficienmance. The fir
inputs to ar function relatnts the optimal
or use in traditnd machining
10
1) is used to r, the rotary the observer s from the e drift caused between the ity feedback derivatives of y and linear arison of the ear encoder. rly identical he maximum ance force d2 ’s current by engaging the he frequency ws dominant w the power ted using (4) I summarizes tuator during performance
direct and EE 20% more
IENCIES OF
ENTS
wr. Total
Avg. Pwr. [W] 37.5 27.7 30.0
g a controller mance while
ntly-actuated s assumed to nd a feedback designing the
maining stable verified using n, an optimal inputs of the
hat maximum mance. Two rived optimal nt controller rst approach achieve the tionship. The l relationship tional H2/H∞ experiments

1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TMECH-02-2015-4329 11
have been used to demonstrate the benefits of the proposed approaches in significantly improving energy efficiency without sacrificing positioning performance for a redundantly-actuated HFD. The proposed FF and FB controller design methods are general enough to apply to any plant (HFD) that is dual input, controllable and minimum phase with positioning performance defined on one of its outputs. Future work will seek to generalize the proposed methods to plants with more than two inputs. Performance and stability issues that could arise when the HFD studied in this paper switches rapidly between its two modes of operation will also be investigated.
REFERENCES [1] Y. Altintas, A. Verl, C. Brecher, L. Uriarte, and G. Pritschow, “Machine
tool feed drives,” CIRP Ann. - Manuf. Technol., vol. 60, no. 2, pp. 779–796, 2011
[2] R. Saidur, “A review on electrical motors energy use and energy savings,” Renew. Sustain. Energy Rev., vol. 14, no. 3, pp. 877–898, 2010.
[3] A. Vijayaraghavan and D. Dornfeld, “Automated energy monitoring of machine tools,” CIRP Ann. - Manuf. Technol., vol. 59, no. 1, pp. 21–24, 2010.
[4] A. E. K. Mohammad A. M., N. Uchiyama, and S. Sano, “Energy Saving in Feed Drive Systems Using Sliding-Mode-Based Contouring Control With a Nonlinear Sliding Surface,” IEEE/ASME Trans. Mechatronics, vol. 20, no. 2, pp. 572–579, 2015.
[5] Y. Halevi, E. Carpanzano, G. Montalbano, and G. Halevi, “Minimum Energy Control of Redundant Linear Manipulators,” J. Dyn. Syst. Meas. Control, vol. 136, no. 5, pp. 1–8, 2014.
[6] M. S. Huang, Y. L. Hsu, and R. F. Fung, “Minimum-energy point-to-point trajectory planning for a motor-toggle servomechanism,” IEEE/ASME Trans. Mechatronics, vol. 17, no. 2, pp. 337–344, 2012.
[7] D. Yoon and C. E. Okwudire, “Magnet assisted stage for vibration and heat reduction in wafer scanning,” CIRP Ann. - Manuf. Technol., vol. 64, no. 1, pp. 381–384, 2015.
[8] J. Park, “Motion profile planning of repetitive point-to-point control for maximum energy conversion efficiency under acceleration conditions,” Mechatronics, vol. 6, no. 6, pp. 649–663, 1996.
[9] Y. Wang, Y. Zhao, K. S. Bortoff, and K. Ueda, “A Real-Time Energy-Optimal Trajectory Generation Method for a Servomotor,” IEEE Trans. Ind. Electron., vol. 62, no. 2, pp. 1175–1188, 2015.
[10] Y. Wang, K. Ueda, and S. A. Bortoff, “A Hamiltonian approach to compute an energy efficient trajectory for a servomotor system,” Automatica, vol. 49, no. 12, pp. 3550–3561, 2013.
[11] M. Helu, B. Behmann, H. Meier, D. Dornfeld, G. Lanza, and V. Schulze, “Impact of green machining strategies on achieved surface quality,” CIRP Ann. - Manuf. Technol., vol. 61, no. 1, pp. 55–58, 2012.
[12] J. B. Dahmus and T. G. Gutowski, “An Environmental Analysis of Machining,” in Manufacturing Engineering and Materials Handling Engineering, 2004, vol. 2004, pp. 643–652
[13] G. Pritschow and W. Philipp, “Direct Drives for High-Dynamic Machine Tool Axes,” CIRP Ann. - Manuf. Technol., vol. 39, no. 1, pp. 413–416, Jan. 1990
[14] A. Robert, “Attack of the linear motors,” Manuf. Eng., vol. 5, pp. 60–64, 1997.
[15] G. Pritschow, “A Comparison of Linear and Conventional Electromechanical Dives,” CIRP Ann. - Manuf. Technol., vol. 47, no. 2, pp. 541–548, 1998
[16] L. Xu and B. Yao, “Adaptive robust precision motion control of linear motors with negligible electrical dynamics: theory and experiments,” IEEE/ASME Trans. Mechatronics, vol. 6, no. 4, pp. 444–452, 2001.
[17] M. Butcher and A. Karimi, “Linear Parameter-Varying Iterative Learning Control With Application to a Linear Motor System,” IEEE/ASME Trans. Mechatronics, vol. 15, no. 3, pp. 412–420, 2010
[18] K. Sato, M. Katori, and A. Shimokohbe, “Ultrahigh-Acceleration Moving-Permanent-Magnet Linear Synchronous Motor With a Long Working Range,” IEEE/ASME Trans. Mechatronics, vol. 18, no. 1, pp. 307–315, 2013
[19] R. Glöß, “Nanometer precise hybrid actuator in positioning mechanism with long travel range,” in International Conference and Exhibition on New Actuators and Drive Systems, Bremen, Germany, 2006, pp. 668–671
[20] H. J. Pahk, D. S. Lee, and J. H. Park, “Ultra precision positioning system for servo motor–piezo actuator using the dual servo loop and digital filter implementation,” Int. J. Mach. Tools Manuf., vol. 41, no. 1, pp. 51–63, 2001
[21] T. Fujita, A. Matsubara, D. Kono, and I. Yamaji, “Dynamic characteristics and dual control of a ball screw drive with integrated piezoelectric actuator,” Precis. Eng., vol. 34, no. 1, pp. 34–42, 2010
[22] L. Juhász and J. Maas, “Control of hybrid nanopositioning systems for trajectory-tracking applications,” Mechatronics, vol. 23, no. 6, pp. 617–629, 2013
[23] S. J. Schroeck, W. C. Messner, and R. J. McNab, “On compensator design for linear time-invariant dual-input single-output systems,” IEEE/ASME Trans. Mechatronics, vol. 6, no. 1, pp. 50–57, Mar. 2001
[24] J. Zheng, W. Su, and M. Fu, “Dual-Stage Actuator Control Design Using a Doubly Coprime Factorization Approach,” IEEE/ASME Trans. Mechatronics, vol. 15, no. 3, pp. 339–348, 2010.
[25] H. Shinno, H. Yoshioka, and M. Hayashi, “A high performance tilting platform driven by hybrid actuator,” CIRP Ann. - Manuf. Technol., vol. 58, no. 1, pp. 363–366, 2009.
[26] S. Frey, K. Groh, and A. Verl, “Semi-active damping of drive systems,” J. Vib. Control, vol. 19, no. 5, pp. 742–754, 2012
[27] C. Okwudire and J. Rodgers, “Design and control of a novel hybrid feed drive for high performance and energy efficient machining,” CIRP Ann. - Manuf. Technol., vol. 62, no. 1, pp. 391–394, 2013
[28] S. Kale, N. Dancholvichit, and C. Okwudire, “Comparative LCA of a Linear Motor and Hybrid Feed Drive under High Cutting Loads,” Procedia CIRP, vol. 14, pp. 552–557, 2014
[29] S. Skogestad and I. Postlethwaite, Multivariable feedback control: analysis and design. Wiley New York, 2007
[30] P. Van den Braembussche, J. Swevers, and H. Van Brussel, “Design and experimental validation of robust controllers for machine tool drives with linear motor,” Mechatronics, vol. 11, no. 5, pp. 545–562, 2001
[31] “Roh’Lix® Linear Actuators.” [Online]. Available: http://www.zero-max.com/linear-motion-control-c-24-l-en.html
[32] E. S. Buice, D. Otten, R. H. Yang, S. T. Smith, R. J. Hocken, and D. L. Trumper, “Design evaluation of a single-axis precision controlled positioning stage,” Precis. Eng., vol. 33, no. 4, pp. 418–424, 2009
[33] K. Varanasi and S. Nayfeh, “The dynamics of lead-screw drives: low-order modeling and experiments,” J. Dyn. Syst. Meas. Control, vol. 126, pp. 388–396, 2004
[34] C. Okwudire and Y. Altintas, “Minimum Tracking Error Control of Flexible Ball Screw Drives Using a Discrete-Time Sliding Mode Controller,” J. Dyn. Syst. Meas. Control, vol. 131, no. 5, p. 051006, 2009
[35] D. J. Gordon and K. Erkorkmaz, “Accurate control of ball screw drives using pole-placement vibration damping and a novel trajectory prefilter,” Precis. Eng., vol. 37, no. 2, pp. 308–322, 2013
[36] D. Sepasi, R. Nagamune, and F. Sassani, “Tracking Control of Flexible Ball Screw Drives With Runout Effect and Mass Variation,” IEEE Trans. Ind. Electron., vol. 59, no. 2, pp. 1248–1256, 2012
[37] C. E. Okwudire and Y. Altintas, “Hybrid Modeling of Ball Screw Drives With Coupled Axial, Torsional, and Lateral Dynamics,” J. Mech. Des., vol. 131, no. 7, p. 071002, 2009
[38] D. Kirk, Optimal control theory: an introduction. Courier Corporation, 2012, pp. 237–240
[39] M. Tomizuka, “Zero Phase Error Tracking Algorithm for Digital Control,” J. Dyn. Syst. Meas. Control, vol. 109, no. 1, p. 65-68, 1987 [40] B. P. Rigney, L. Y. Pao, and D. A. Lawrence, “Nonminimum Phase
Dynamic Inversion for Settle Time Applications,” IEEE Trans. Control Syst. Technol., vol. 17, no. 5, pp. 989–1005, 2009.
[41] J. A. Butterworth, L. Y. Pao, and D. Y. Abramovitch, “Analysis and comparison of three discrete-time feedforward model-inverse control techniques for nonminimum-phase systems,” Mechatronics, vol. 22, no. 5, pp. 577–587, 2012.
[42] M. Duan and C. Okwudire, “Energy Efficiency and Performance Optimized Control of a Hybrid Feed Drive,” in ASME 2015 International Manufacturing Science and Engineering Conference, 2015.
[43] S. Chen, “Another Particle Swarm Toolbox,” MATLAB Central File Exchange, 2014. [Online]. Available: http://www.mathworks.com/matlabcentral/fileexchange/25986-another-particle-swarm-toolbox/content/psopt/pso.m.

1083-4435 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TMECH.2015.2500165, IEEE/ASMETransactions on Mechatronics
TM
[44
[45
[46
and*
*
*
cl
cl
cl
a
a
a
*
*
cl
cl
a
a
FdeslimmmJusincthrthedifbecthadamhavtheincenoeffval
Fig
MECH-02-2015
4] T. H. Kim, I. Mon the constrain4, pp. 1104–111
] Y. Altintas, Mamachine tool vi2012.
6] M. Darouach, Mlinear systems w39, no. 3, pp. 60
The coefficiend plant parame
*,5 1 2 ,4
*,3 14 2
*1 23
* *,2 14 15
*1 21
,
clm m a
K b c K
m K k
k K K
m K c K
* * *13 24 1
* *,1 12 13
* * *11 24 1
* *,0 11 21
K K K
k K K
K K K
k K K
Fig. 14 showssired position t
mits of 100 mm/s4 for velocist as in Fig. 8, tcreased and rinree local minime energy begfference in the cause the trajeat used in Fig. 8mped poles, anving very high e absence of creases. Nonetough to providficiency of thelue, irrespectiv
g. 14. Total Heat ERe
5-4329
Maruta, and T. Sugined particle swarm10, 2008. nufacturing autombrations, and CNC
M. Zasadzinski, anwith unknown inpu06–609, 1994.
VI. APP
nts of D*cl as f
eters are given
*1 25 2
* * *25 24 1
*2 12
* *24 25 1
1
m K b c
K K c K
m K k
K K b b
K
* * *2 13 22
* * * *14 23 15 22
* *22 23
* * * *2 23 13 22
* * * *11 22 12 2
,
K K K
K K K
K K c K
K K K K
K K K K
s the energy vstrajectory, xd, o
mm/s, 1×103 mity, acceleratiothere is initially
nging is reducema at Kff = 66, ins to increaenergy vs. Kff
ectory used in 8. Therefore, itnd its efficiencvalues of Kff. Tringing), effic
theless, just asde sufficiently
e proposed NEve of the value
nergy of Proposedeference Trajectory
ie, “Robust PID com optimization,” Au
mation: metal cuttiC design. Cambrid
nd S. J. Xu, “Full-outs,” IEEE Trans.
PENDIX
functions of thbelow:
*2 14 1
* * *5 15 25 1
1 2 1 2
* *2 1 23 2 1
,
m K b c
K c K b
b b c b b
b b K b K
* * *23 12 25
* * *11 21 1 21
* *14 21
*1
,
.
K K K
K K b K
K K
s. Kff plot geneof stroke 15 mm
mm/s2, 5×104 mon, jerk and sny a sharp drop d. However, in200 and 500; bse slightly buprofiles of FigFig. 14 is lesshas is less ring
cy is hurt ratheThis is becauseciency should in Fig. 8, as l
y damped poleEO FF remains
of Kff.
d NEO FF as a Funy given in Append
ontroller tuning bautomatica, vol. 44,
ing mechanics, dge university pres
order observers forAutomat. Contr., v
e elements of
1
*12
,c
c
(37)
erated based onm, with kinemamm/s3 and 1×nap, respectivein energy as Kf
n Fig. 14 there beyond Kff = 5ut steadily. T
g. 8 and Fig. 14s aggressive thging due to pooer than helped , in theory (i.e.
decrease as ong as Kff is hs in G−1
ff−neo, s near its optim
nction of Kff (baseddix)
ased , no.
s,
r vol.
K*
n a atic 107 ely.
Kff is are 00,
The 4 is han orly
by , in Kff igh the
mal
d on
12