experiences with canoe-based fault injection for...
TRANSCRIPT

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
Patrick E. Lanigan, Priya NarasimhanElectrical & Computer Engineering
Carnegie Mellon University
Experiences with CANoe-based Fault Injection for AUTOSAR
Thomas E. FuhrmanResearch & DevelopmentGeneral Motors Company
1
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
WHAT TO EXPECT
• A brief overview of automotive systems / tools– AUTOSAR
– FlexRay
– Vector CANoe
• A description of a proof-of-concept software-implemented fault-injection framework
• An example application of the framework
• A qualitative discussion of the what worked well, as well as what did not work so well.
2
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
WHAT NOT TO EXPECT
• A dependability evaluation of the...– AUTOSAR specification
– AUTOSAR implementation
– FlexRay protocol
– demo application
• A discussion of specific fault-models• A coverage assessment
• A quantitative analysis
3

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
ROADMAP
• Introduction– Overview of automotive systems
– Motivation
– Goals
• Fault-injection framework
• Runtime evaluation
• Conclusion
4
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
AUTOMOTIVE SYSTEMS
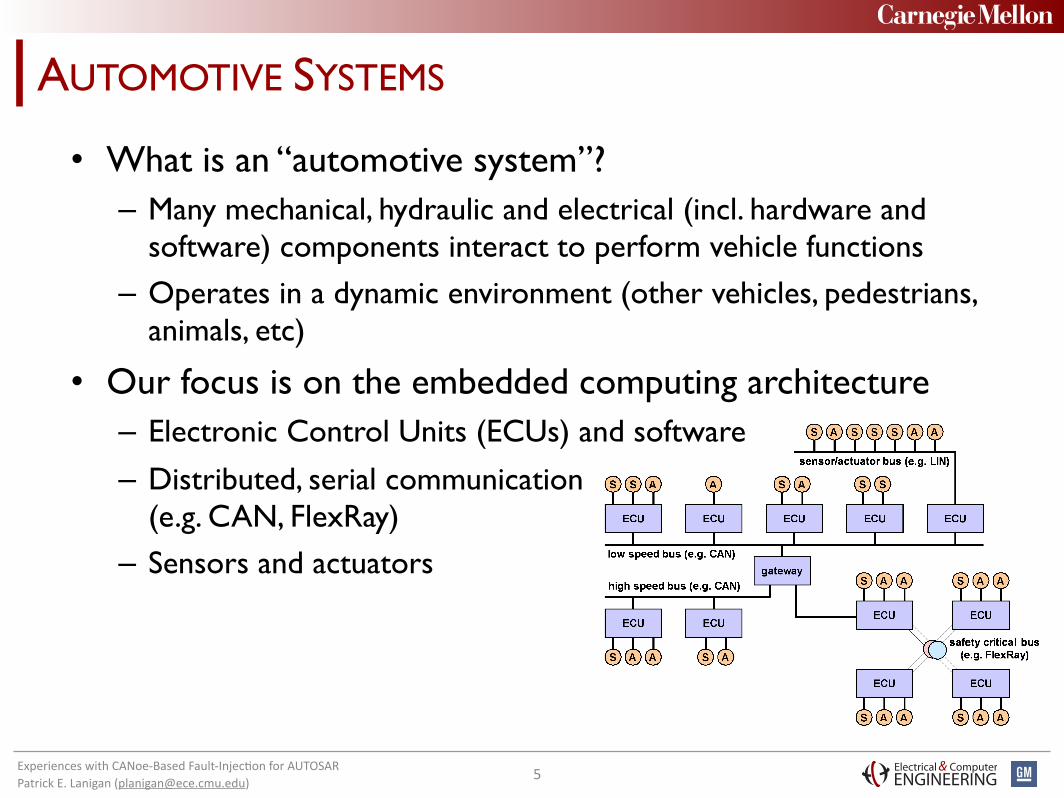
• What is an “automotive system”?– Many mechanical, hydraulic and electrical (incl. hardware and
software) components interact to perform vehicle functions
– Operates in a dynamic environment (other vehicles, pedestrians, animals, etc)
• Our focus is on the embedded computing architecture– Electronic Control Units (ECUs) and software
– Distributed, serial communication(e.g. CAN, FlexRay)
– Sensors and actuators
5

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
Electronics account for significant and increasing proportion of innovation as well as cost.
BACKGROUND: AUTOSAR
• Standard software-architecture for automotive applications– Encourage reuse of software
– Reduce development costs
• Layered architecture– Basic Software (BSW) layers
provide hardware abstractions
– Application layer implements high-level functionality
– Runtime Environment (RTE) layer enables information exchange
6
Page 13 - AUTOSAR Confidential -
Layered Software ArchitectureV2.2.2
R3.1 Rev 0001
Document ID 053
Part 2 – Overview of Software Layers ID: 02-02 Layered View: Coarse
ComplexDrivers
Microcontroller
Microcontroller Abstraction Layer
Services Layer
Application Layer
AUTOSAR Runtime Environment (RTE)
ECU Abstraction Layer
Source: AUTOSAR Layered Software Architecture, Document ID 053, p. 13.http://www.autosar.org/download/R4.0/AUTOSAR_EXP_LayeredSoftwareArchitecture.pdf
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
BACKGROUND: FLEXRAY
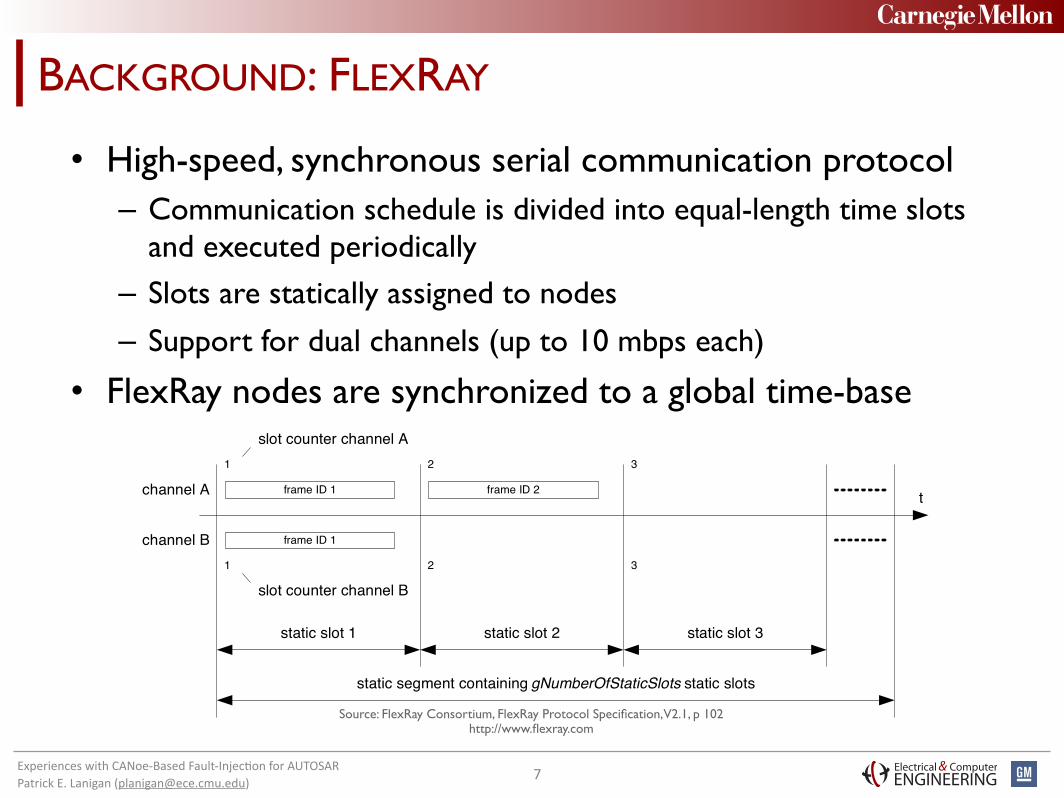
• High-speed, synchronous serial communication protocol– Communication schedule is divided into equal-length time slots
and executed periodically
– Slots are statically assigned to nodes
– Support for dual channels (up to 10 mbps each)
• FlexRay nodes are synchronized to a global time-base
7
FlexRay Protocol Specification
Version 2.1 Revision A 15-December-2005
Chapter 5: Media Access Control
Page 102 of 245
The media access procedure is specified by means of the media access process for channel A. The nodeshall contain an equivalent media access process for channel B.
5.1.3 Static segmentWithin the static segment a static time division multiple access scheme is applied to coordinate transmis-sions.
5.1.3.1 Structure of the static segmentIn the static segment all communication slots are of identical, statically configured duration and all framesare of identical, statically configured length.For communication within the static segment the following constraints apply:1. Sync frames shall be transmitted on all connected channels.2. Non-sync frames may be transmitted on either channel, or both.3. Only one node shall transmit a given frame ID on a given channel.56
4. If the cluster is configured for single slot mode, all non-sync nodes shall designate a frame as the sin-gle slot frame.
5.1.3.2 Execution and timing of the static segmentIn order to schedule transmissions each node maintains a slot counter state variable vSlotCounter forchannel A and a slot counter state variable vSlotCounter for channel B. Both slot counters are initializedwith 1 at the start of each communication cycle and incremented at the end boundary of each slot.Figure 5-3 illustrates all transmission patterns that are possible for a single node within the static segment.In slot 1 the node transmits a frame on channel A and a frame on channel B. In slot 2 the node transmits aframe only on channel A57. In slot 3 no frame is transmitted on either channel.
Figure 5-3: Structure of the static segment.
The number of static slots gNumberOfStaticSlots is a global constant for a given cluster.
56 This requirement applies to the entire operation of the cluster, as opposed to only a single cycle. For example, it is not acceptable to configure a cluster such that different nodes transmit in the same slot/channel combination in different cycles.
57 Analogously, transmitting only on channel B is also allowed.
channel A
channel B
frame ID 1
frame ID 1
frame ID 2
static segment containing gNumberOfStaticSlots static slots
static slot 1 static slot 2 static slot 3
t
1
1
2
2
3
3
slot counter channel A
slot counter channel B
Reg
iste
red
copy
for p
atric
k.e.
lani
gan@
gm.c
om
Source: FlexRay Consortium, FlexRay Protocol Specification, V2.1, p 102http://www.flexray.com
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
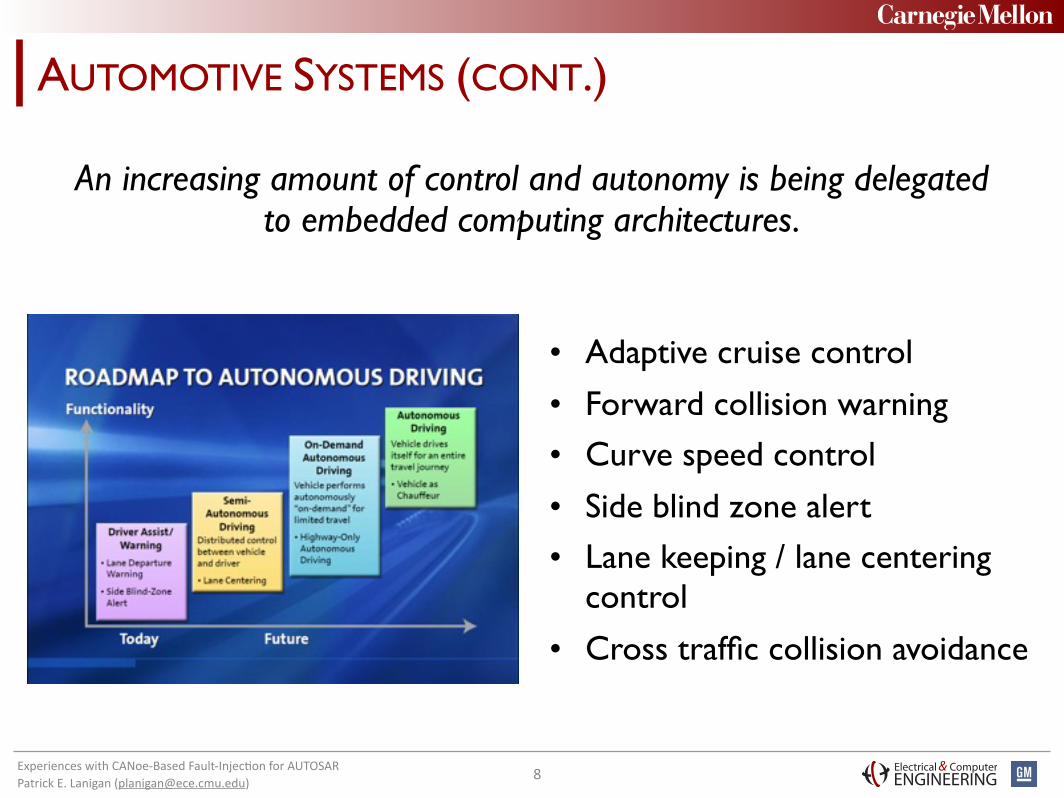
An increasing amount of control and autonomy is being delegated to embedded computing architectures.
AUTOMOTIVE SYSTEMS (CONT.)
• Adaptive cruise control
• Forward collision warning
• Curve speed control
• Side blind zone alert
• Lane keeping / lane centering control
• Cross traffic collision avoidance
8

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
MOTIVATION FOR OUR FRAMEWORK
• AUTOSAR is likely to be a key enabler of functional safety systems
• Fault-injection plays an important role in the dependability analysis of such systems– “Highly recommended” by upcoming ISO 26262 standard
• Hardware-based fault injection requires specialized equipment (e.g., TTXDisturbance node)– Availability, cost, complexity can limit applicability
– Cannot accurately target specific software modules
• How far can we go with existing software tools (e.g., Vector CANoe)?
9
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
BACKGROUND: VECTOR CANOE
• CANoe is a simulation and evaluation environment for automotive applications
• Supports a variety of bus protocols (e.g., FlexRay)
• The behavior of simulated nodes can be defined in multiple ways– External DLL using CANoe programming interface
– CAPL scripting language
• Provides graphical and text-based output windows
10
3/2
CANoe 7.2The Development and Test Tool for CAN, LIN, MOST, FlexRay, Ethernet and J1708
CANoe is an all-round tool for the development, testing and anal-ysis of entire ECU networks and individual ECUs. It supports theuser during the entire development process – from planning tostartup of entire distributed systems and their individual ECUs.CANoe’s versatile functions and configuration options are used bynetwork designers, development engineers and test engineers atOEMs and suppliers.At the beginning of the development process CANoe is used tocreate simulation models that emulate the behavior of the ECUs.Over the course of ECU development these models serve globallyas a foundation for analysis, testing and integration of bus sys-tems and ECUs. This lets you detect and correct problems early.Both graphic and text-based evaluation windows are available foryou to evaluate the results.CANoe contains the Test Feature Set for easy and automated exe-cution of tests. It is used to model and execute sequential testflows with automatic generation of a test report. Also available inCANoe is the Diagnostic Feature Set for diagnostic communicationwith the ECU.
FunctionsThe basic functions of CANoe are:> Use of network describing data bases (e.g. DBC, FIBEX, LDF,
NCF, MOST Function Catalog)> Simulation of complete systems and remaining bus simulation
via modelling> Analyzing the bus communication> Test entire networks and/or individual ECUs> Diagnostic communication via KWP2000 and UDS and use as a
full-fledged diagnostic tester> User programmable with integrated C-like CAPL programming
language to support simulation, analysis and testing> User-customized interfaces can be created to control the
simulation and tests or display analysis data
The CANoe user interface with control and display panels, analysis windows and the TestExecution dialog
CANoe supports the following bus systems and protocols> Bus systems: CAN, LIN, MOST, FlexRay, Ethernet, J1708> CAN-based protocols: J1939, NMEA 2000, ISO 11783,
CANopen, MCNet, GMLAN, CANaerospace
Special functions> For critical real time relevant simulations, CANoe operation
is distributed between two PCs, whereby the simulationand test core runs under Windows XP Embedded.
> Numerous auxiliary modules simplify adaptation to OEM-specific services and protocols (Transport Protocols,Network Management, Interaction Layer, etc.).
> Diagnostics is parameterized by ODX 2.0.1 or 2.2.0. Physical and functional addressing are also supported. The integrated OBD-II tester enables quick standard diagnostics.
Vector Katalog Design Test_EN 15.02.2010 10:02 Uhr Seite 3/2
More Information: www.vector.com/contact
Sour
ce: V
ecto
r Pr
oduc
t C
atal
og, p
. 32

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES”
11
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES”
11
Functionality
(1) Exercise error handling (2) Runtime configuration(3) Runtime visualization
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES”
11
Functionality
(1) Exercise error handling (2) Runtime configuration(3) Runtime visualization
Controllability
Repeatable scenarios with respect to time, location
and duration.
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES”
11
Functionality
(1) Exercise error handling (2) Runtime configuration(3) Runtime visualization
Controllability
Repeatable scenarios with respect to time, location
and duration.
Observability
Distinguish masked faults from faults with no effect.

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES”
11
Functionality
(1) Exercise error handling (2) Runtime configuration(3) Runtime visualization
Controllability
Repeatable scenarios with respect to time, location
and duration.
Observability
Distinguish masked faults from faults with no effect.
Portability
Minimize changes required to existing codebase(s).
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES”
11
Functionality
(1) Exercise error handling (2) Runtime configuration(3) Runtime visualization
Controllability
Repeatable scenarios with respect to time, location
and duration.
Observability
Distinguish masked faults from faults with no effect.
Portability
Minimize changes required to existing codebase(s).
Flexibility
Support a wide range of scenarios, faults and
errors.
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES”
11
Functionality
(1) Exercise error handling (2) Runtime configuration(3) Runtime visualization
Controllability
Repeatable scenarios with respect to time, location
and duration.
Observability
Distinguish masked faults from faults with no effect.
Portability
Minimize changes required to existing codebase(s).
Flexibility
Support a wide range of scenarios, faults and
errors.
Avoid Probe Effects
Fault-injection process should not produce
unintended side effects.
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
ROADMAP
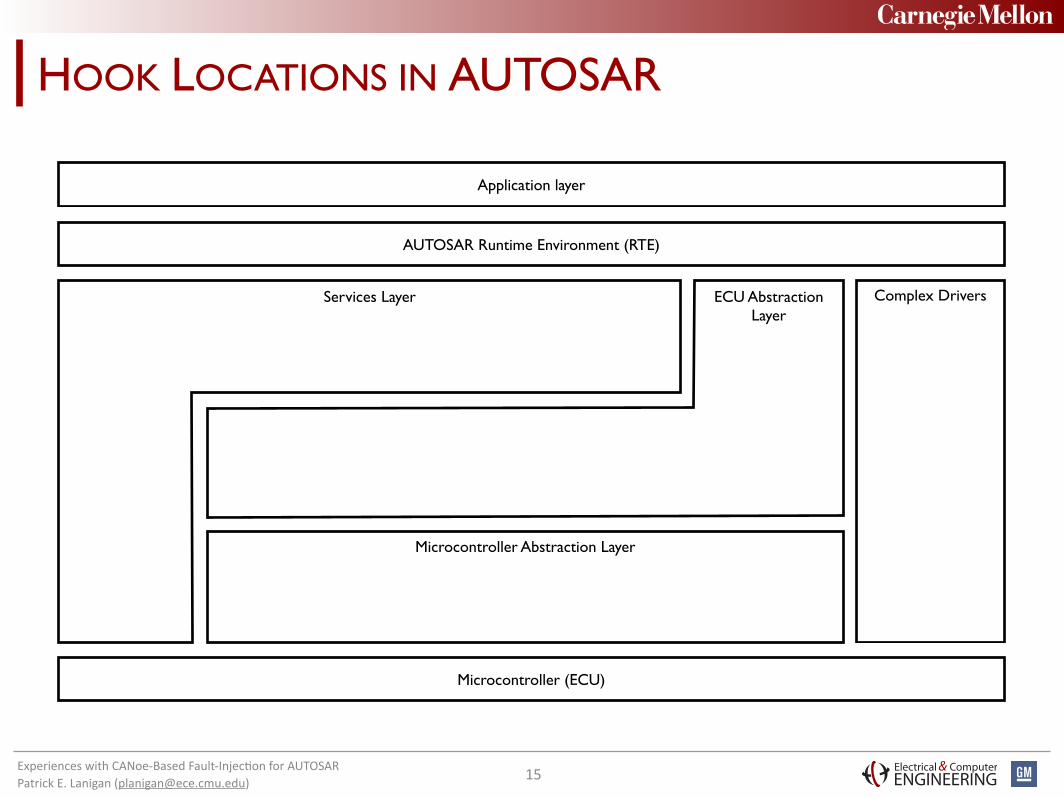
• Introduction• Fault-injection framework– Architecture
– Fault-injection hook locations
– Example use of fault-injection hooks
• Runtime evaluation
• Conclusion
12

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
FAULT-INJECTION STRATEGY
• Hooks are inserted into AUTOSAR functions– Manipulation hooks modify function arguments
– Suppression hooks cause functions to return error codes
• Fault-injection scenarios are defined by six parameters
13
Manipula(on parameters
Suppression parameters
Loca;on
Argument Mask Offset Opera;on
Loca;on
Ac;ve
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
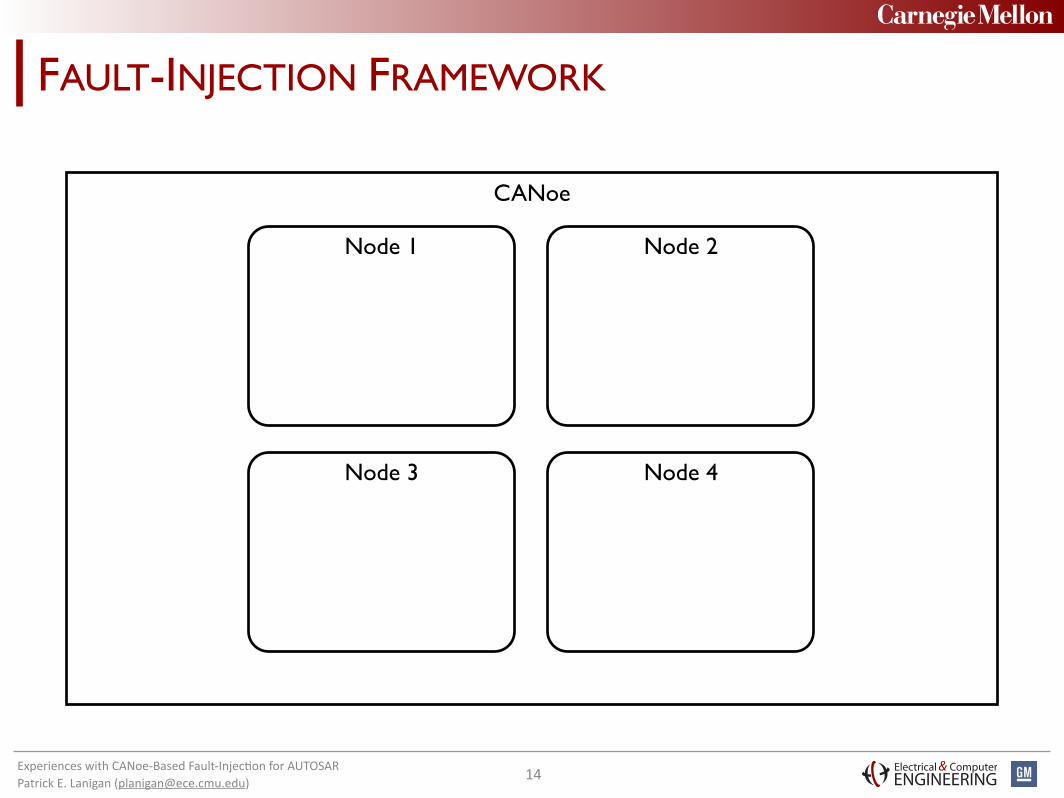
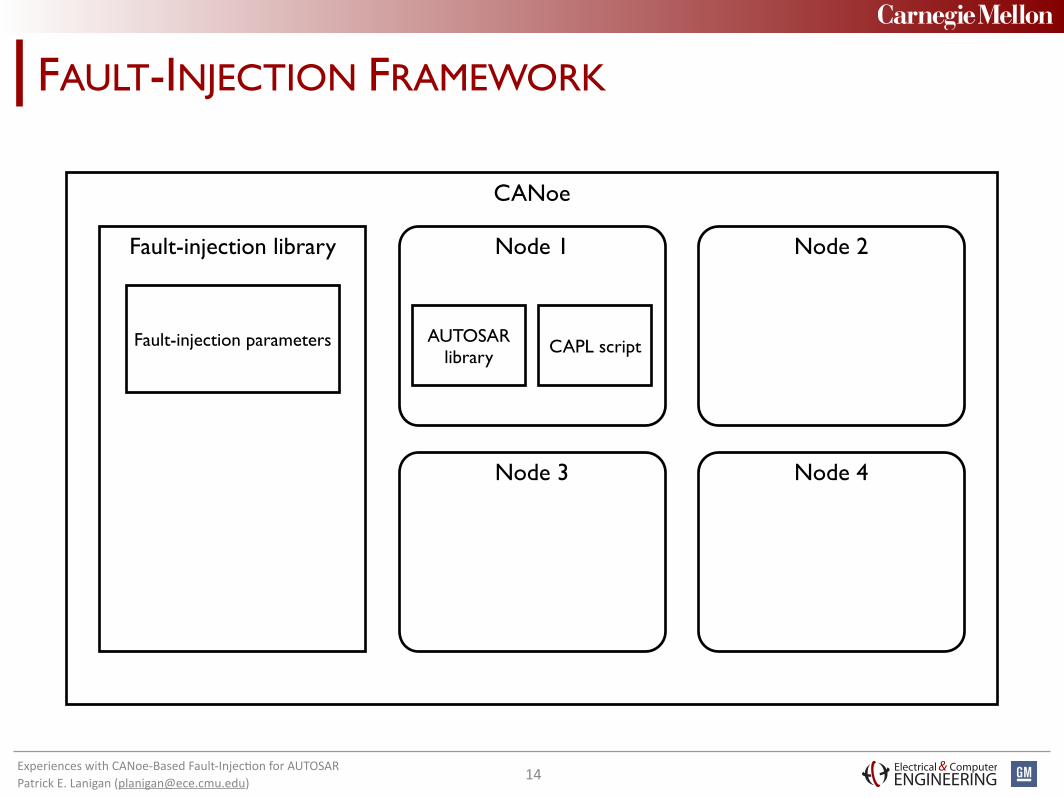
FAULT-INJECTION FRAMEWORK
CANoe
Node 1
Node 3 Node 4
Node 2
14
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
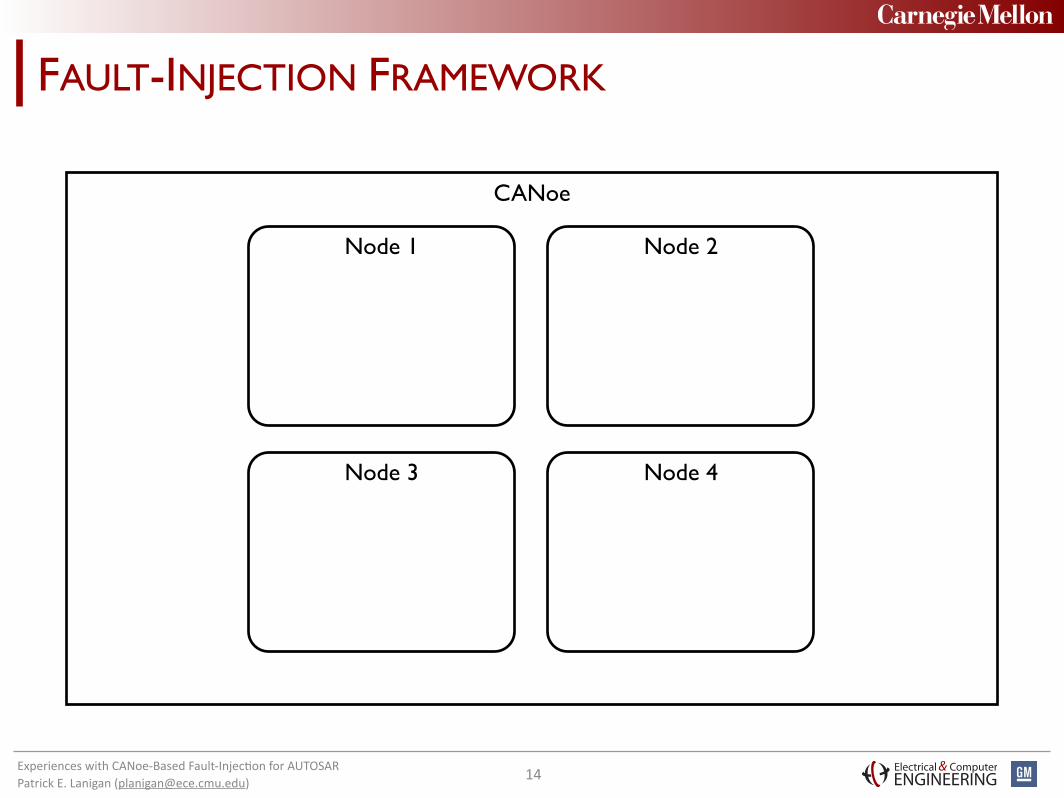
FAULT-INJECTION FRAMEWORK
CANoe
Node 1
Node 3 Node 4
Node 2
14
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
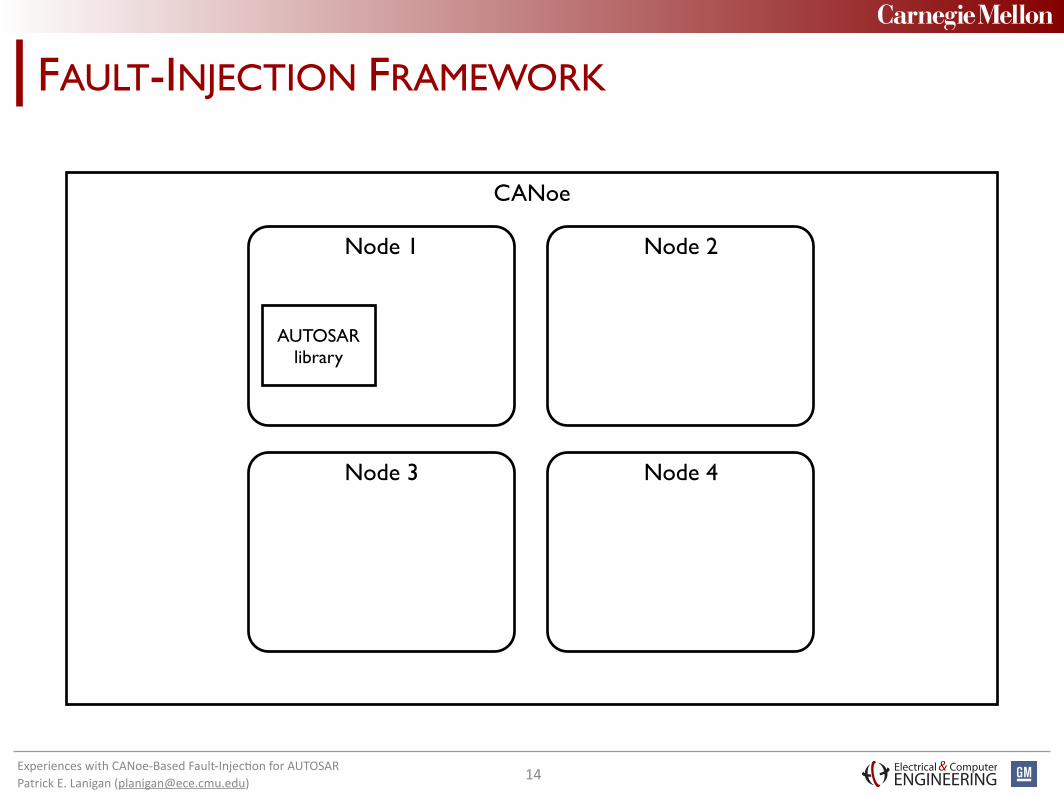
FAULT-INJECTION FRAMEWORK
CANoe
Node 1
Node 3 Node 4
Node 2
AUTOSAR library
14

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
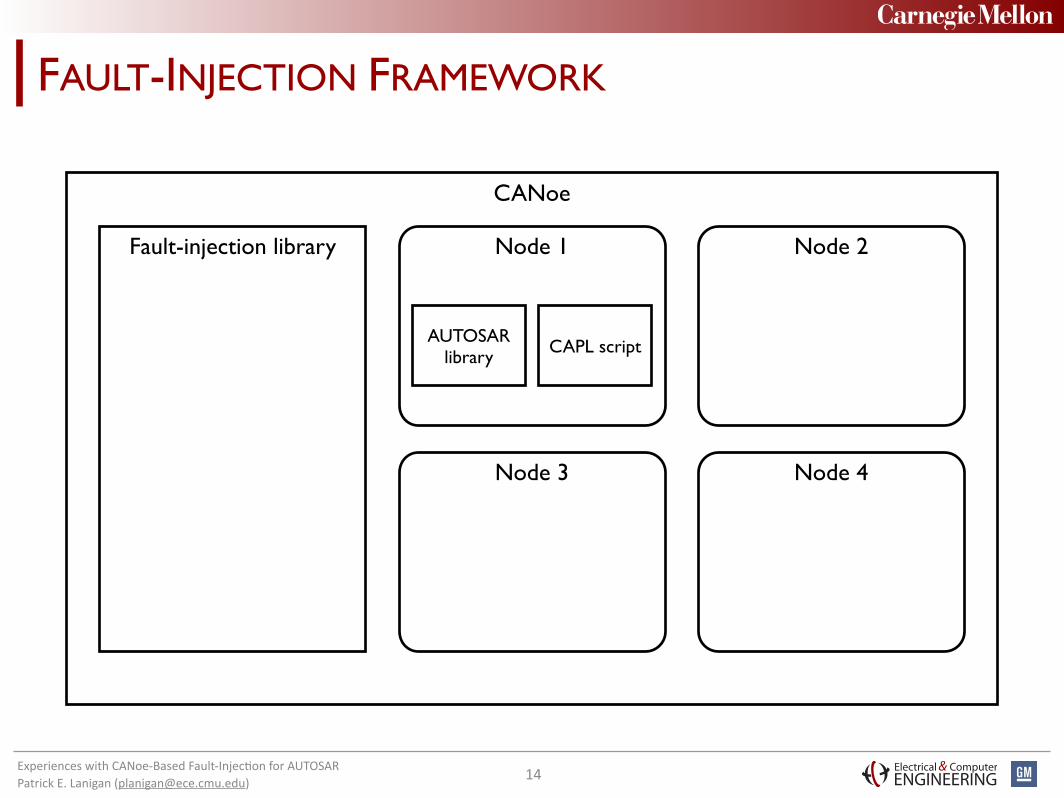
FAULT-INJECTION FRAMEWORK
CANoe
Node 1
Node 3 Node 4
Node 2
CAPL scriptAUTOSAR library
14
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
FAULT-INJECTION FRAMEWORK
CANoe
Fault-injection library Node 1
Node 3 Node 4
Node 2
CAPL scriptAUTOSAR library
14
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
FAULT-INJECTION FRAMEWORK
CANoe
Fault-injection library Node 1
Node 3 Node 4
Node 2
CAPL scriptAUTOSAR library
Fault-injection parameters
14
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
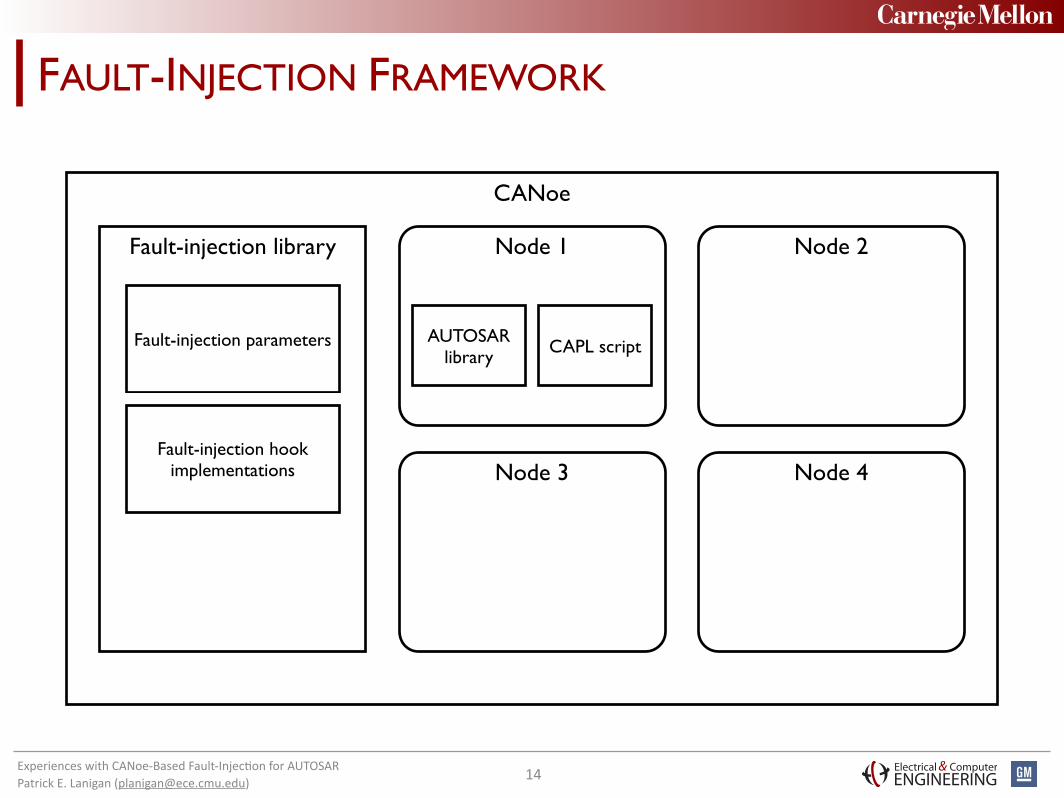
FAULT-INJECTION FRAMEWORK
CANoe
Fault-injection library Node 1
Node 3 Node 4
Node 2
CAPL scriptAUTOSAR library
Fault-injection parameters
Fault-injection hook implementations
14
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
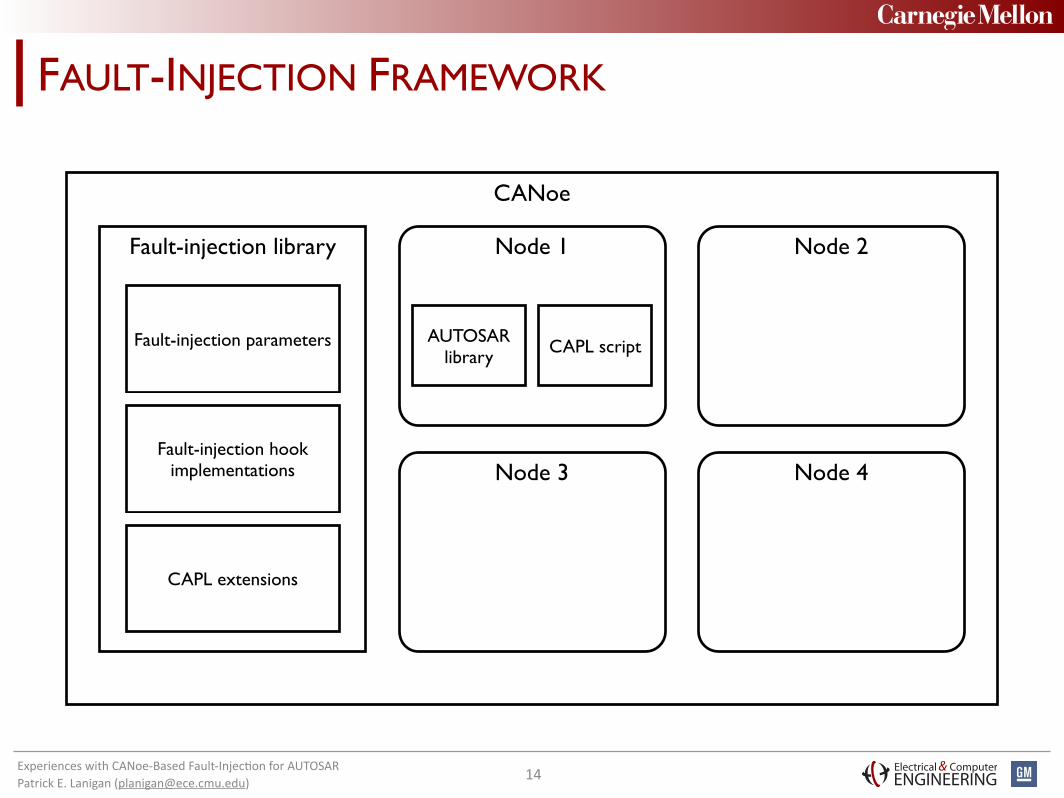
FAULT-INJECTION FRAMEWORK
CANoe
Fault-injection library Node 1
Node 3 Node 4
Node 2
CAPL scriptAUTOSAR library
Fault-injection parameters
Fault-injection hook implementations
CAPL extensions
14

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
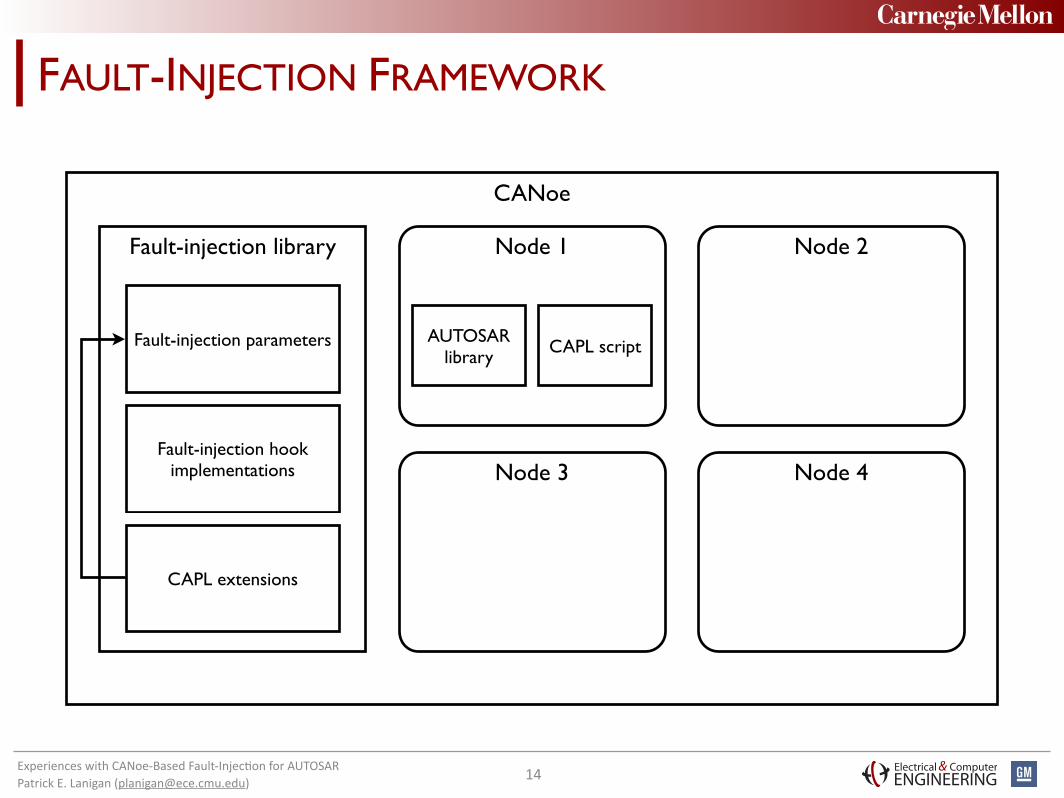
FAULT-INJECTION FRAMEWORK
CANoe
Fault-injection library Node 1
Node 3 Node 4
Node 2
CAPL scriptAUTOSAR library
Fault-injection parameters
Fault-injection hook implementations
CAPL extensions
14
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
FAULT-INJECTION FRAMEWORK
CANoe
Fault-injection library Node 1
Node 3 Node 4
Node 2
CAPL scriptAUTOSAR library
Fault-injection parameters
Fault-injection hook implementations
CAPL extensions
14

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
FAULT-INJECTION FRAMEWORK
CANoe
Fault-injection library Node 1
Node 3 Node 4
Node 2
CAPL scriptAUTOSAR library
Fault-injection parameters
Fault-injection hook implementations
CAPL extensions
14

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
FAULT-INJECTION FRAMEWORK
CANoe
Fault-injection library Node 1
Node 3 Node 4
Node 2
CAPL scriptAUTOSAR library
Fault-injection parameters
Fault-injection hook implementations
CAPL extensions
14

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
FAULT-INJECTION FRAMEWORK
CANoe
Fault-injection library Node 1
Node 3 Node 4
Node 2
CAPL scriptAUTOSAR library
Fault-injection parameters
Fault-injection hook implementations
CAPL extensions
14

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
HOOK LOCATIONS IN AUTOSAR
Application layer
AUTOSAR Runtime Environment (RTE)
Complex DriversECU Abstraction Layer
Microcontroller (ECU)
Services Layer
Microcontroller Abstraction Layer
15
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
HOOK LOCATIONS IN AUTOSAR
Application layer
AUTOSAR Runtime Environment (RTE)
Complex DriversECU Abstraction Layer
Microcontroller (ECU)
Services Layer
Microcontroller Abstraction Layer
15
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
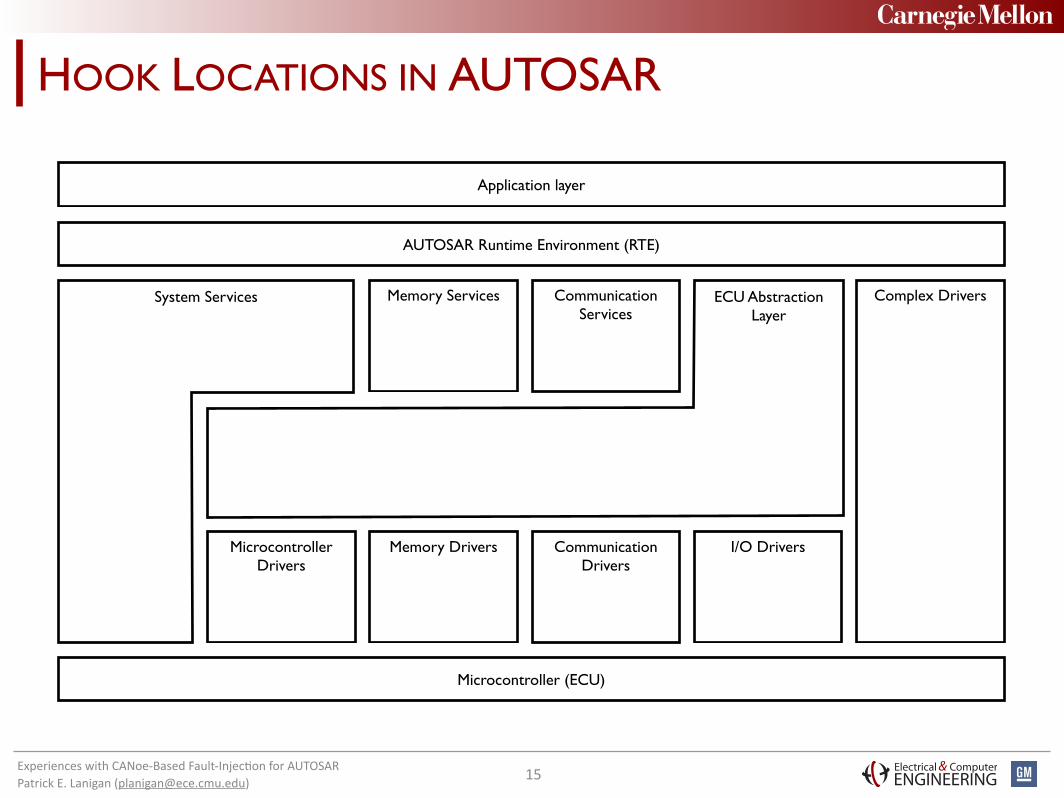
HOOK LOCATIONS IN AUTOSAR
Application layer
AUTOSAR Runtime Environment (RTE)
System Services Complex DriversMemory Services Communication Services
ECU Abstraction Layer
Microcontroller Drivers
Memory Drivers Communication Drivers
I/O Drivers
Microcontroller (ECU)
15
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
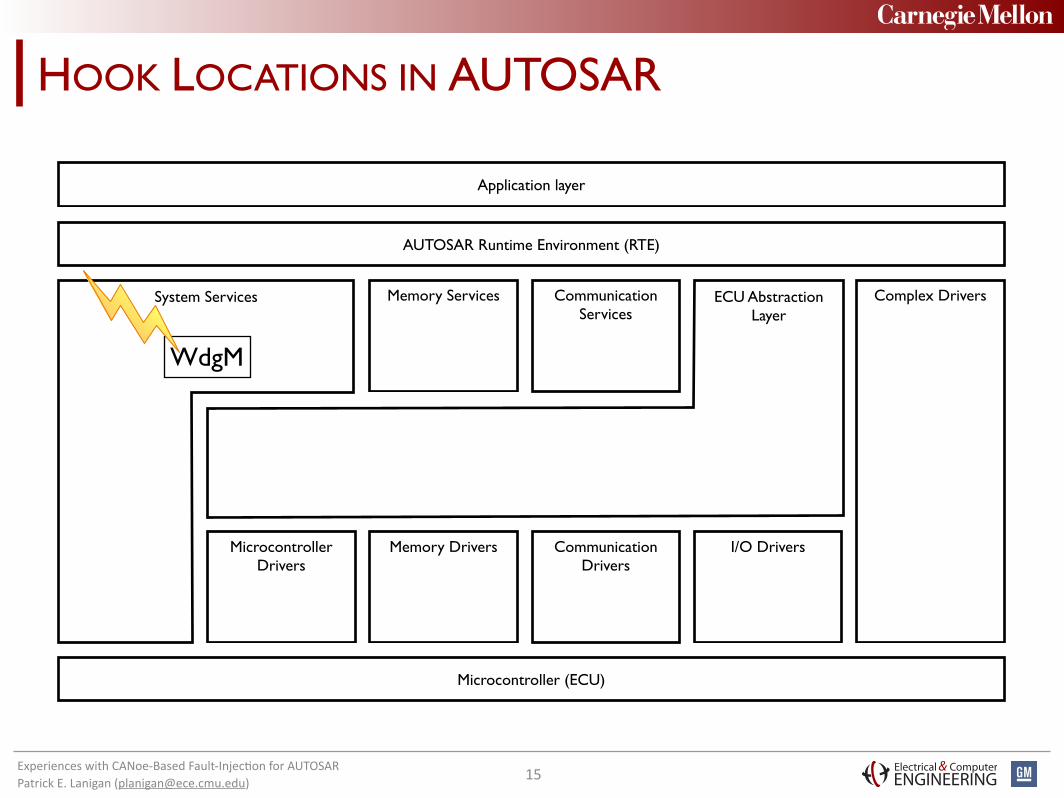
HOOK LOCATIONS IN AUTOSAR
Application layer
AUTOSAR Runtime Environment (RTE)
System Services Complex DriversMemory Services Communication Services
ECU Abstraction Layer
Microcontroller Drivers
Memory Drivers Communication Drivers
I/O Drivers
Microcontroller (ECU)
WdgM
15

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
HOOK LOCATIONS IN AUTOSAR
Application layer
AUTOSAR Runtime Environment (RTE)
System Services Complex DriversMemory Services Communication Services
ECU Abstraction Layer
Microcontroller Drivers
Memory Drivers Communication Drivers
I/O Drivers
Microcontroller (ECU)
ComWdgM
15
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
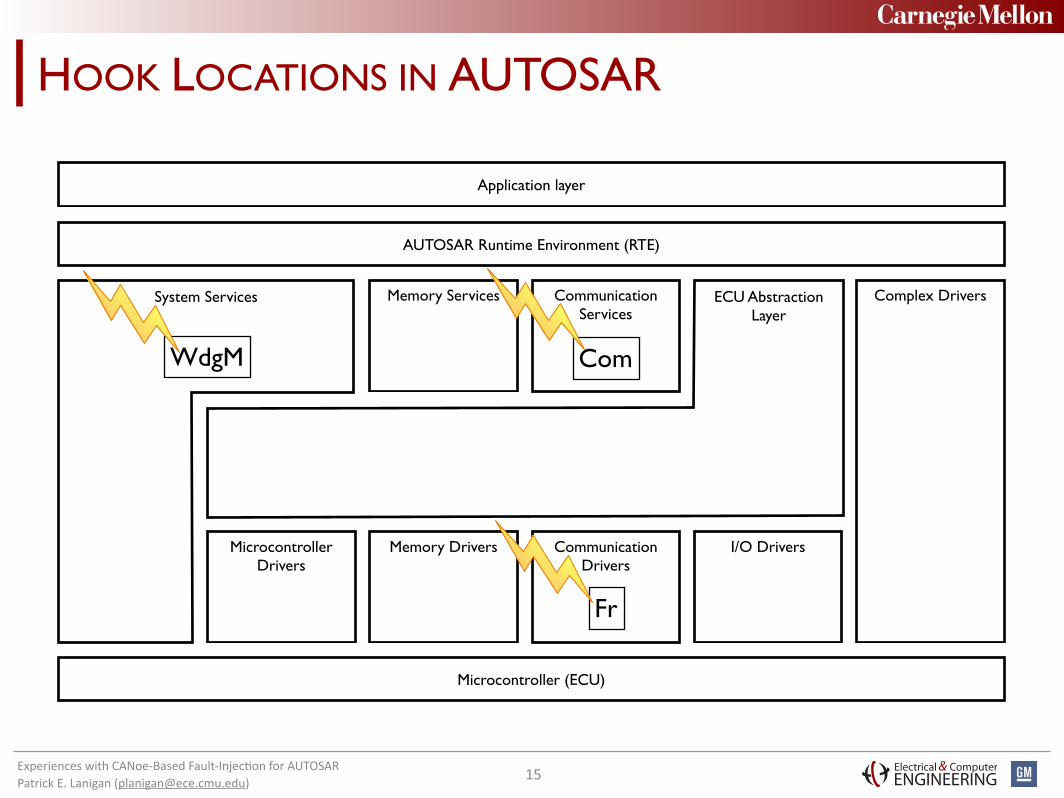
HOOK LOCATIONS IN AUTOSAR
Application layer
AUTOSAR Runtime Environment (RTE)
System Services Complex DriversMemory Services Communication Services
ECU Abstraction Layer
Microcontroller Drivers
Memory Drivers Communication Drivers
I/O Drivers
Microcontroller (ECU)
ComWdgM
Fr
15

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE HOOK USAGE
16
if (SWIFI_Suppress_Fr_Tx()) {return E_NOT_OK;
}
If the suppression hook is active, immediately return an error code.
Pass target arguments by reference for manipulation inside the hook. Arguments are only modified if the current location is active.
SWIFI_Hook_Fr_Tx(&channel, &slotId, &baseCycle, &cycleRep, &frameStatus,(uint16 *)&Fr_LSduLength, (uint8 *)Fr_LSduPtr);
CANoeAPI_SendFlexRayMessage(Fr_CtrlIdx, channel, slotId, baseCycle,cycleRep, frameStatus, Fr_LSduLength, Fr_LSduPtr);

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE HOOK IMPLEMENTATIONS
17
EXPORT_C int SWIFI_Suppress_Com_Write() { return (gFi_Location == SWIFI_LOC_COM_WRITE) && gFi_Suppress;}
Suppression hooks return a boolean value that indicates whether or not the instrumented function should abort.
Modifiable arguments (id, buffer) are passed by reference, while non-modifiable arguments (bLength) provide additional context.EXPORT_C int SWIFI_Hook_Com_Write(uint16 *id, uint16 bLength, uint8 *buffer) { if ((gFi_Location == SWIFI_LOC_COM_WRITE) && (gFi_Operation != SWIFI_OP_NONE)) { switch(gFi_Argument) { case SWIFI_ARG_PAYLOAD: apply_mask(buffer, bLength, gFi_Mask, gFi_Offset, gFi_Operation); return 1; case SWIFI_ARG_SLOTID: apply_mask((uint8 *)id, sizeof(uint16), gFi_Mask, gFi_Offset, gFi_Operation); return 1; default: return 0; } }
return 0;}
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
ROADMAP
• Introduction• Fault-injection framework
• Runtime evaluation– Configuration interface
– Demo application
– Example scenarios and fault manifestations
• Conclusion
18

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
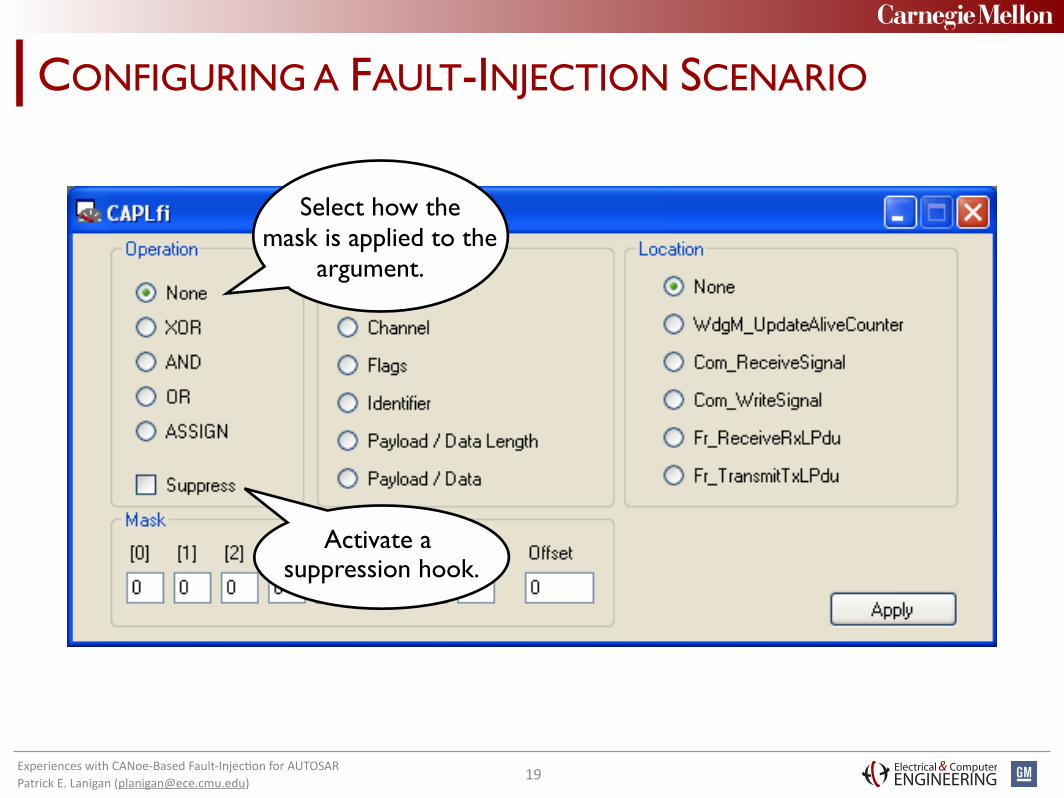
CONFIGURING A FAULT-INJECTION SCENARIO
19

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
CONFIGURING A FAULT-INJECTION SCENARIO
Select how the mask is applied to the
argument.
19
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
CONFIGURING A FAULT-INJECTION SCENARIO
Select how the mask is applied to the
argument.
Activate a suppression hook.
19

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
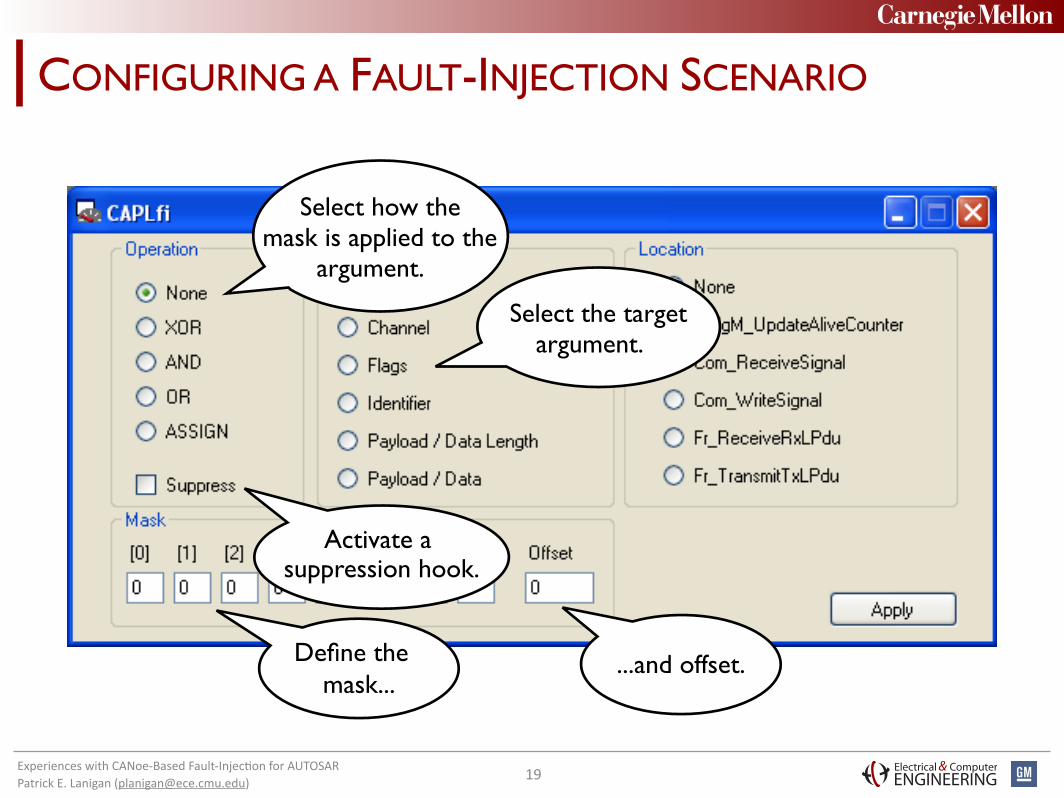
CONFIGURING A FAULT-INJECTION SCENARIO
Select how the mask is applied to the
argument.
Activate a suppression hook.
Select the target argument.
19
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
CONFIGURING A FAULT-INJECTION SCENARIO
Select how the mask is applied to the
argument.
Activate a suppression hook.
Select the target argument.
Define the mask...
...and offset.
19

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
CONFIGURING A FAULT-INJECTION SCENARIO
Select how the mask is applied to the
argument.
Activate a suppression hook.
Select the target argument.
Define the mask...
Select the target location.
...and offset.
19

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
CONFIGURING A FAULT-INJECTION SCENARIO
Select how the mask is applied to the
argument.
Activate a suppression hook.
Select the target argument.
Define the mask...
Select the target location.
...and offset.
19
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
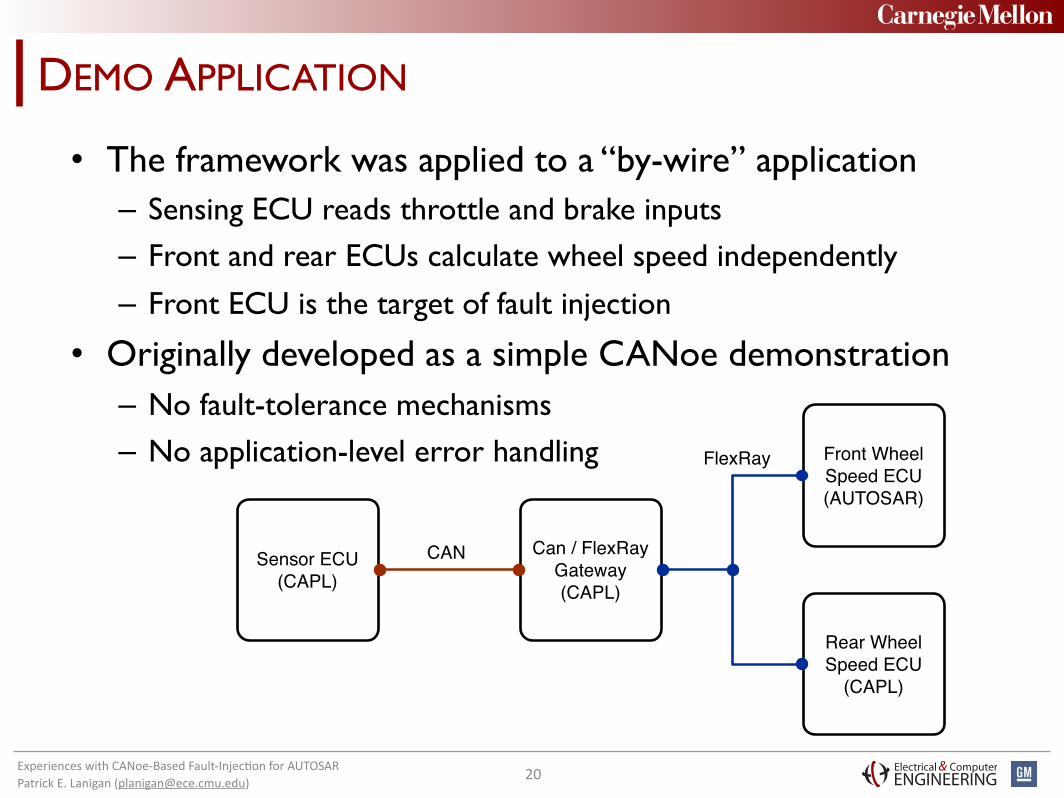
DEMO APPLICATION
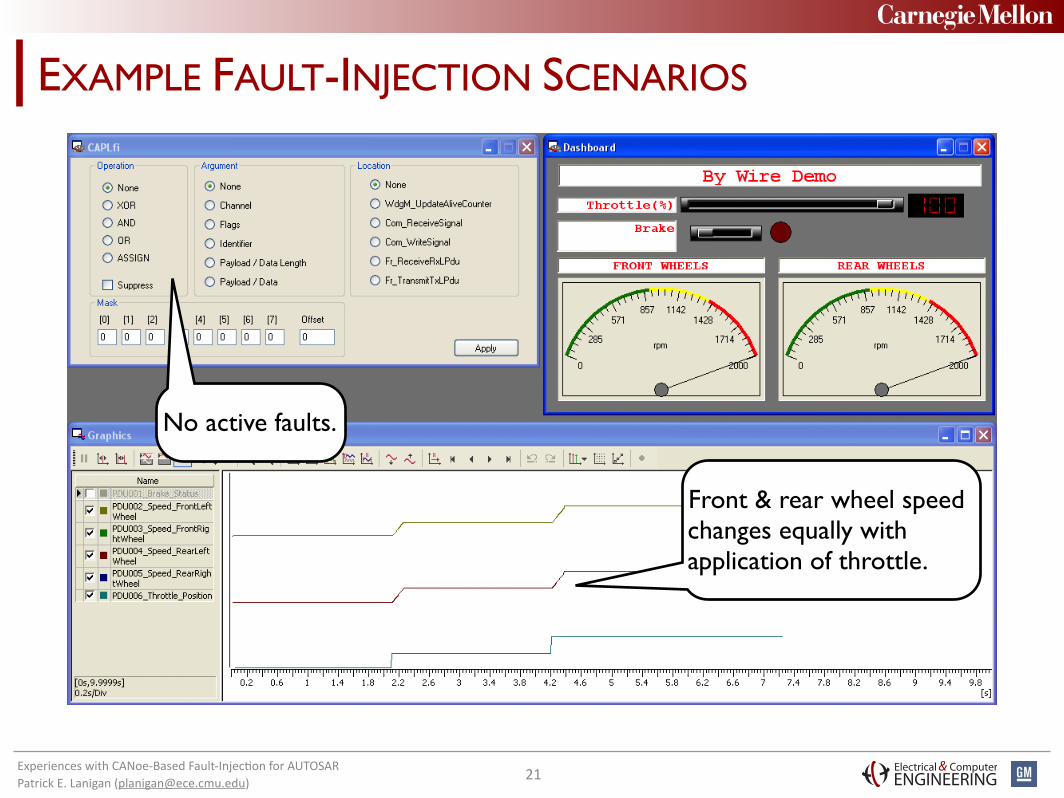
• The framework was applied to a “by-wire” application– Sensing ECU reads throttle and brake inputs
– Front and rear ECUs calculate wheel speed independently
– Front ECU is the target of fault injection
• Originally developed as a simple CANoe demonstration– No fault-tolerance mechanisms
– No application-level error handling
20
Sensor ECU(CAPL)
Can / FlexRay Gateway(CAPL)
Front Wheel Speed ECU(AUTOSAR)
Rear Wheel Speed ECU
(CAPL)
CAN
FlexRay

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS
21

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS
21
No active faults.
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS
21
No active faults.
Front & rear wheel speed changes equally with application of throttle.
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS (CONT.)
22

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS (CONT.)
22
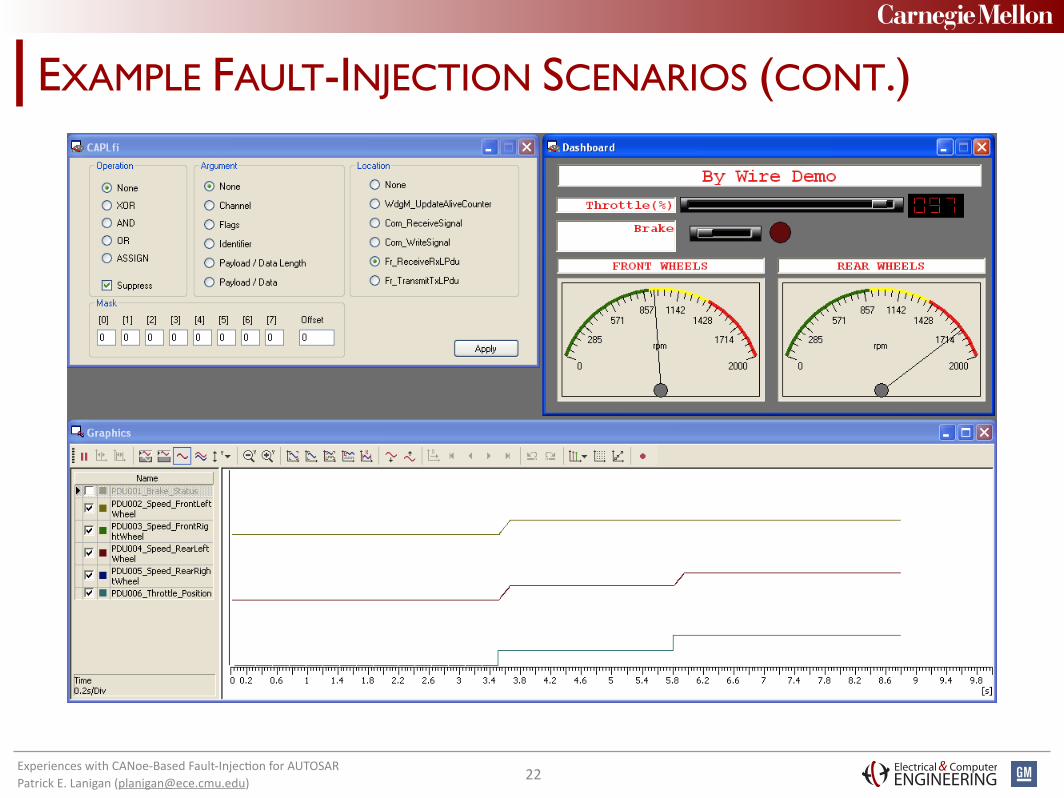
Suppression hook is active.

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS (CONT.)
22
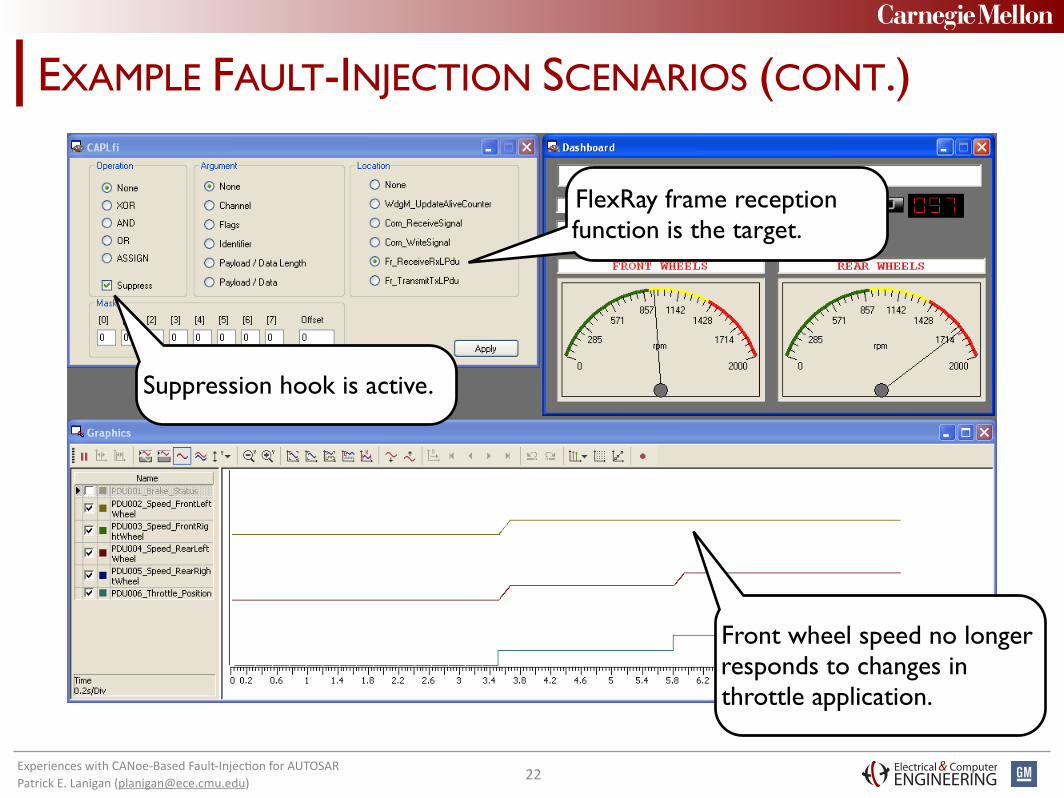
FlexRay frame reception function is the target.
Suppression hook is active.
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS (CONT.)
22
Front wheel speed no longer responds to changes in throttle application.
FlexRay frame reception function is the target.
Suppression hook is active.
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS (CONT.)
23
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS (CONT.)
23
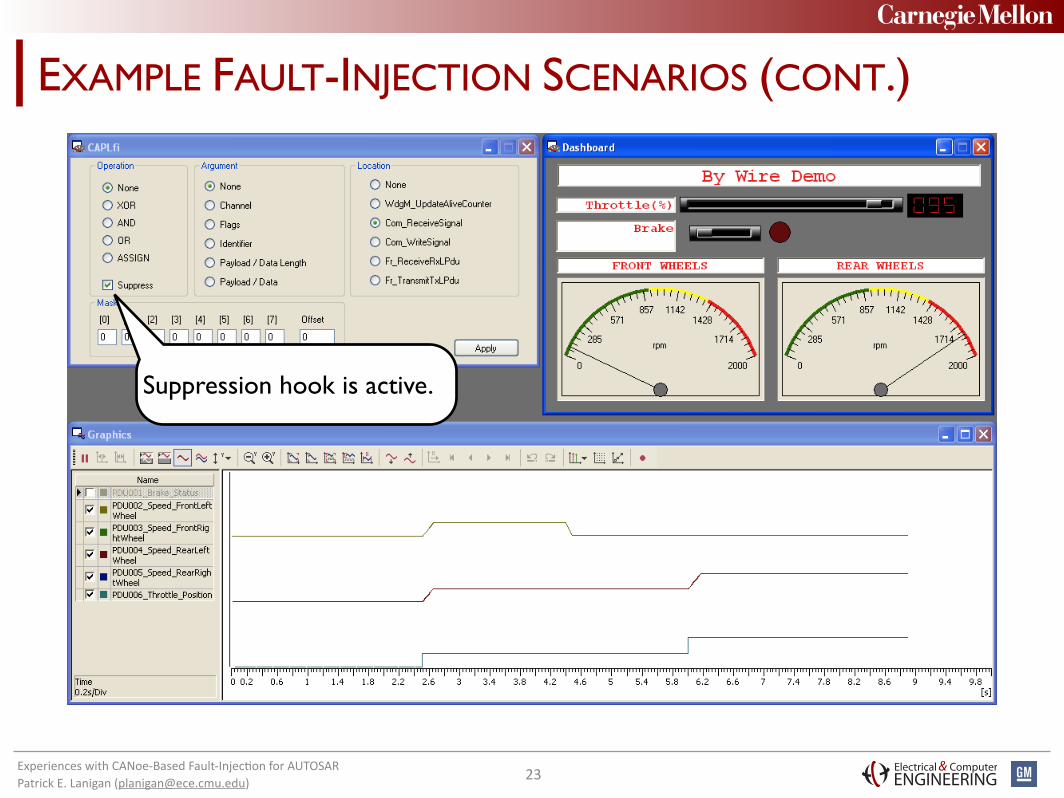
Suppression hook is active.

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS (CONT.)
23
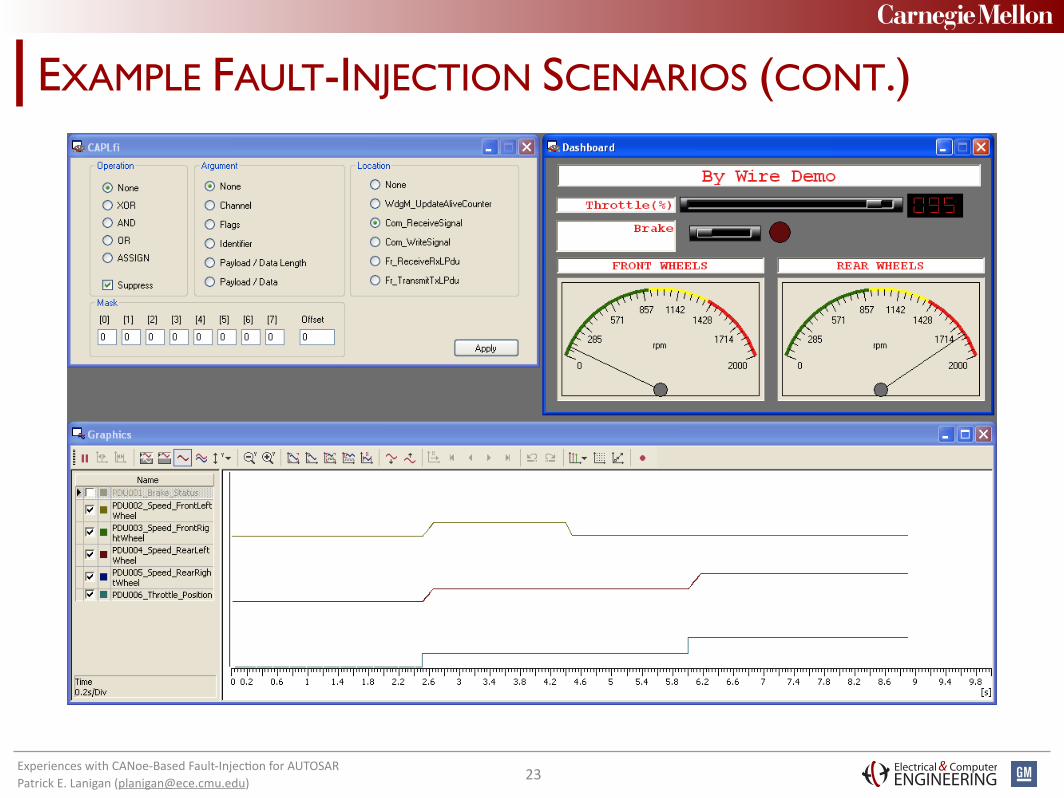
Suppression hook is active.
Com signal reception function is the target.

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
EXAMPLE FAULT-INJECTION SCENARIOS (CONT.)
23
Suppression hook is active.
Com signal reception function is the target.
Front wheel speed drops immediately and no longer responds to changes in throttle application.
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
ROADMAP
• Introduction• Fault-injection framework
• Runtime evaluation• Conclusion– Lessons learned
– Summary
– Questions
24

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES” (LESSONS LEARNED REMIX)
25

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES” (LESSONS LEARNED REMIX)
25
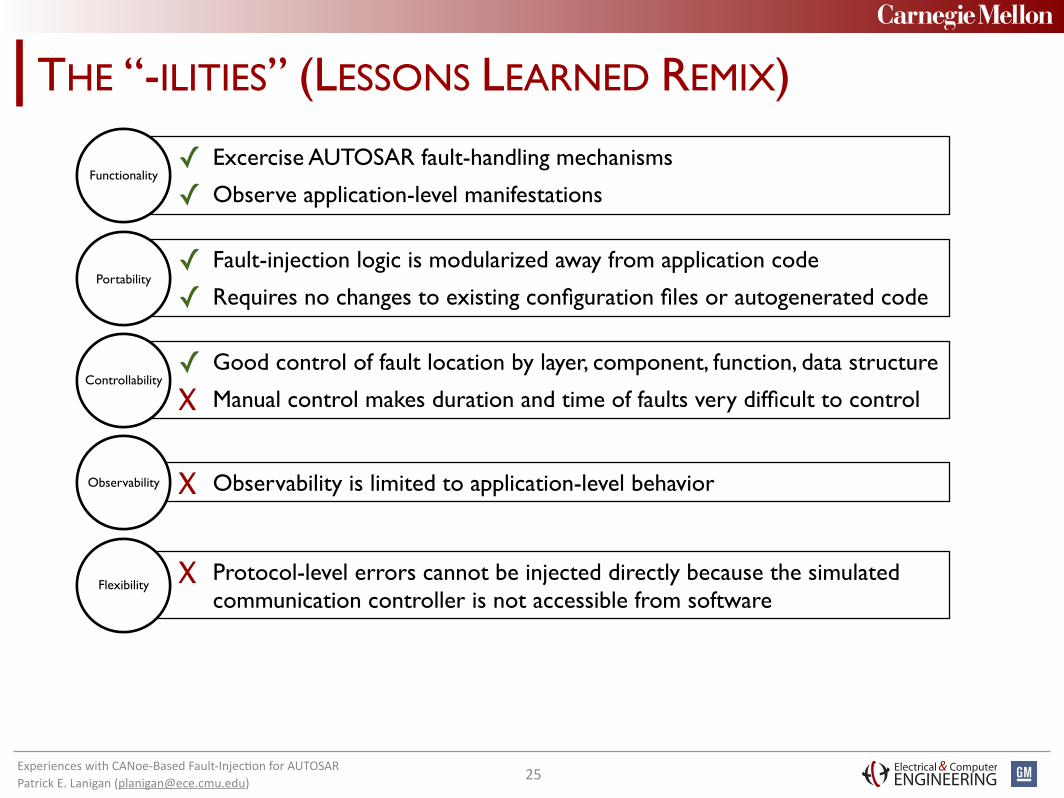
✓ Excercise AUTOSAR fault-handling mechanisms
✓ Observe application-level manifestationsFunctionality

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES” (LESSONS LEARNED REMIX)
25
✓ Excercise AUTOSAR fault-handling mechanisms
✓ Observe application-level manifestationsFunctionality
✓ Fault-injection logic is modularized away from application code
✓ Requires no changes to existing configuration files or autogenerated codePortability

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES” (LESSONS LEARNED REMIX)
25
✓ Excercise AUTOSAR fault-handling mechanisms
✓ Observe application-level manifestationsFunctionality
✓ Fault-injection logic is modularized away from application code
✓ Requires no changes to existing configuration files or autogenerated codePortability
✓ Good control of fault location by layer, component, function, data structure
X Manual control makes duration and time of faults very difficult to controlControllability

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES” (LESSONS LEARNED REMIX)
25
✓ Excercise AUTOSAR fault-handling mechanisms
✓ Observe application-level manifestationsFunctionality
✓ Fault-injection logic is modularized away from application code
✓ Requires no changes to existing configuration files or autogenerated codePortability
✓ Good control of fault location by layer, component, function, data structure
X Manual control makes duration and time of faults very difficult to controlControllability
X Observability is limited to application-level behaviorObservability
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES” (LESSONS LEARNED REMIX)
25
✓ Excercise AUTOSAR fault-handling mechanisms
✓ Observe application-level manifestationsFunctionality
✓ Fault-injection logic is modularized away from application code
✓ Requires no changes to existing configuration files or autogenerated codePortability
✓ Good control of fault location by layer, component, function, data structure
X Manual control makes duration and time of faults very difficult to controlControllability
X Observability is limited to application-level behaviorObservability
X Protocol-level errors cannot be injected directly because the simulated communication controller is not accessible from software
Flexibility
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES” (LESSONS LEARNED REMIX)
25
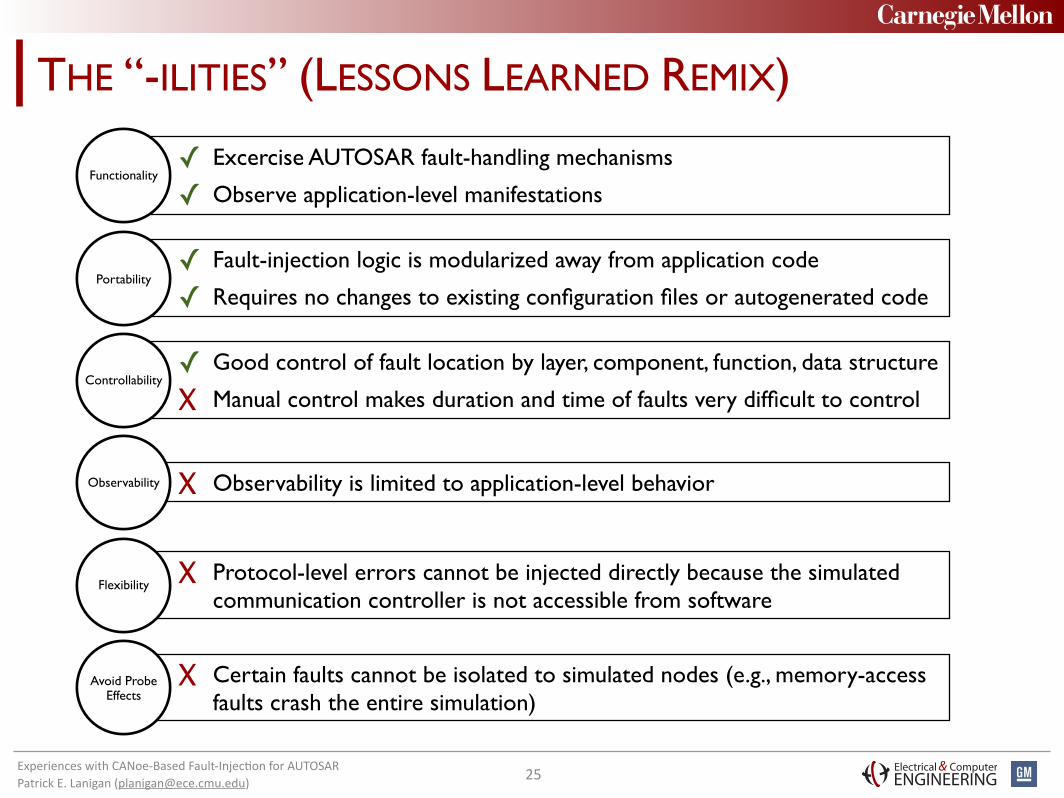
✓ Excercise AUTOSAR fault-handling mechanisms
✓ Observe application-level manifestationsFunctionality
✓ Fault-injection logic is modularized away from application code
✓ Requires no changes to existing configuration files or autogenerated codePortability
✓ Good control of fault location by layer, component, function, data structure
X Manual control makes duration and time of faults very difficult to controlControllability
X Observability is limited to application-level behaviorObservability
X Protocol-level errors cannot be injected directly because the simulated communication controller is not accessible from software
Flexibility
X Certain faults cannot be isolated to simulated nodes (e.g., memory-access faults crash the entire simulation)
Avoid Probe Effects
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES” (LESSONS LEARNED REMIX)
25
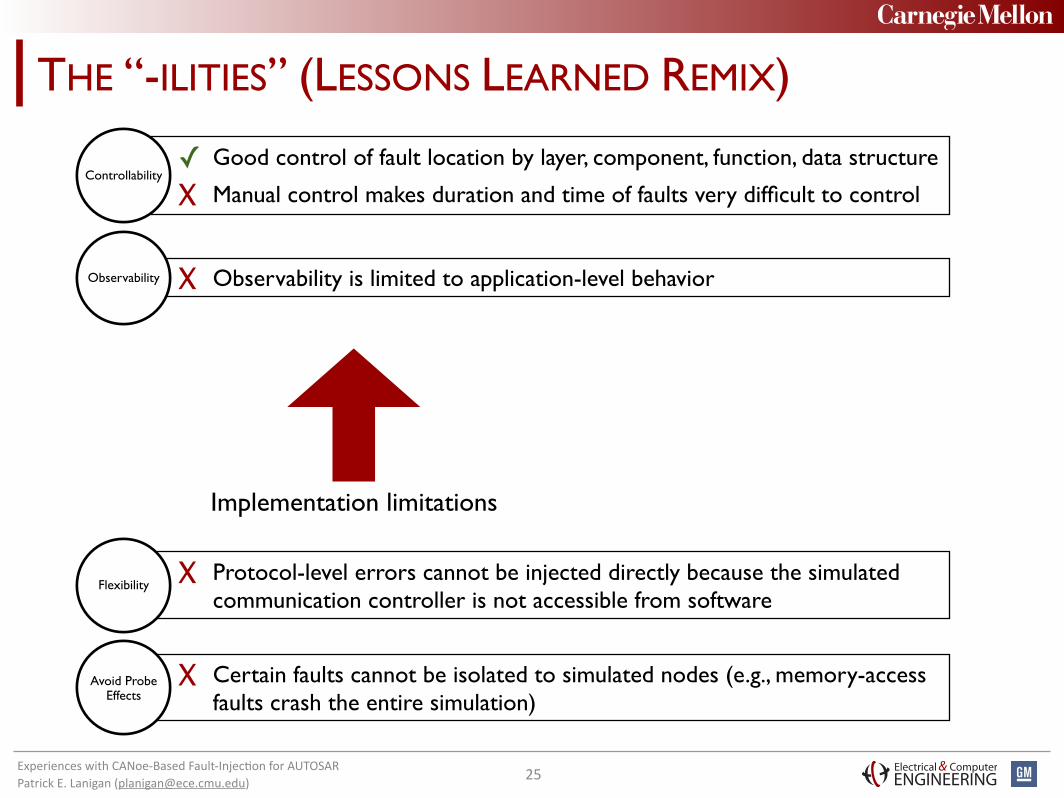
✓ Good control of fault location by layer, component, function, data structure
X Manual control makes duration and time of faults very difficult to controlControllability
X Observability is limited to application-level behaviorObservability
X Protocol-level errors cannot be injected directly because the simulated communication controller is not accessible from software
Flexibility
X Certain faults cannot be isolated to simulated nodes (e.g., memory-access faults crash the entire simulation)
Avoid Probe Effects
Implementation limitations

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
THE “-ILITIES” (LESSONS LEARNED REMIX)
25
✓ Good control of fault location by layer, component, function, data structure
X Manual control makes duration and time of faults very difficult to controlControllability
X Observability is limited to application-level behaviorObservability
X Protocol-level errors cannot be injected directly because the simulated communication controller is not accessible from software
Flexibility
X Certain faults cannot be isolated to simulated nodes (e.g., memory-access faults crash the entire simulation)
Avoid Probe Effects
Environment limitations
Implementation limitations

Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
SUMMARY
26
• CANoe is a suitable environment for fault-injection, provided that the faults injected fall within the level of abstraction provided by the simulation.
• This proof-of-concept framework shows promise for rapid-prototyping of new applications.
• A combination of techniques are likely required for a robust analysis.
Experiences with CANoe-‐Based Fault-‐Injec;on for AUTOSAR Patrick E. Lanigan ([email protected])
QUESTIONS?
27
Patrick E. [email protected]