experimenting delay effectsrifat/ysp08.pdf · feedback control in ball beam dynamics -...
TRANSCRIPT

Feedback Control in Ball Beam Dynamics
- Experimenting Delay Effects
Benjamin Gertner
Framingham High School
Mike Wilson
Beverly High school
Professor Rifat SipahiNortheastern University
Young Scholars Program, Northeastern University
Background & Terminology
What is “feedback control” ?
Sensors
Stability / Instability
Cruise Control

Block Diagram Convention (Controlled)
Controller
Plant
DesiredSpeed
Comparator
Actual Speed
Feedback
Errorsignal
Controlsignal
Sensor(Encoder)
DC Motor

Block Diagram Convention (Uncontrolled)
Controller
Plant
DesiredSpeed
Comparator
Actual Speed
Feedback
Errorsignal
Controlsignal
Sensor(Encoder)
DC Motor

Block Diagram—Motor (PID Controller)
Voltage
Scope
Saturation
RPM Error
RPM
Position Error
Integrator1s
Gain 3
1
Gain 22
Gain 1
1
Gain
-0.001533980787886 *60 /2/pi
Encoder Input
National InstrumentsNIM ENC
Derivativew/ filter
50s
s+50
Derivative
du /dt
Constant
20
Analog Output
National InstrumentsNIM DAC
Sensor (encoder)
Desired Speed 20 RPM
Controller
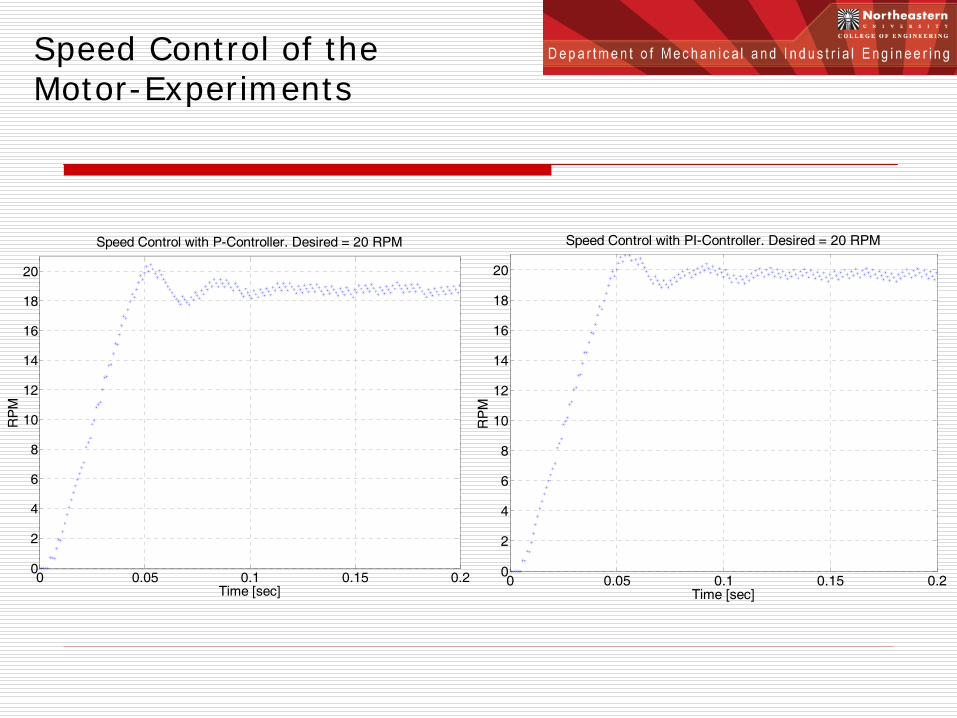
Speed Control of the Motor-Experiments
0 0.05 0.1 0.15 0.20
2
4
6
8
10
12
14
16
18
20
RP
M
Time [sec]
Speed Control with P-Controller. Desired = 20 RPM
0 0.05 0.1 0.15 0.20
2
4
6
8
10
12
14
16
18
20
Speed Control with PI-Controller. Desired = 20 RPM
RP
M
Time [sec]

0 2 4 6 8 10 12 14-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time [sec]
Pos
ition
[rad
]
Position Tracking with P-Controller, Red = Actual, Blue = Desired
Position Control of the Motor- Experiments
0 5 10 15-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time [sec]
Pos
ition
[rad
]
Position Tracking with PID-Controller, Red = Actual, Blue = Desired
Error = ±15°!! Error = ±3°


No Delay – Ball At Start
Introduction to Ball Beam Dynamics

What is Delay and Where is it?
Time that it takes to receive a signal
Where:Remote surgery Human reaction delaysChemical processesRoboticsTele-operationMissiles and targetsLight delay (circuits, all electronics)

Delay Effects
How would you implement delay?Why does delay lead to instability?Compensation of undesirable effects
Wait before you act (observe trends)Be less aggressive when compensatingAdvanced controller development (research)

Block Diagram—Ball Beam Dynamics
SRV02 - Experiment #3BB01 - Ball & Beam
Double PV Controller : Experiment vs . SimulationRun: Setup _SRV02_Exp3
error
delay
VariableTransport Delay
To
Theta D
Theta
Step3
Step 2
Step 1
Step
SimulatedBall Position
SRV02 Closed Loop
Theta D Theta
Radiansto Degrees
R2D
Radiansto Degrees
R2D
PhysicalLimitationof Beam
Outer Loop Kp
Kp _bb
Outer Loop Kd
Kv_bb
Offset in Degrees
56
Must Opertatein LinearRegion
Derivativew/ filter
20s
s+20
Delay 1
0
Degrees toRadians
D2R
Command in
centimeters
5
Calibrate Postion to read in centimeters
(-20 to 20 )
-L*2.54 /10
Ball Positionin centimeters
Ball & Beam Simulation
x_d x
Aplha to Theta
L/r
Analog Input
National InstrumentsNIM ADC

0.2 Second Delay– Ball At Start

Delay—Graph
0 1 2 3 4 5 6 7 8 9 10-20
-15
-10
-5
0
5
10
15
Time (sec)
Posit
ion (c
m)
Delay effect from start
.2 secondsNo delay
Kv_bb=.006 Kp_bb=.01

No Delay – Ball At Equilibrium
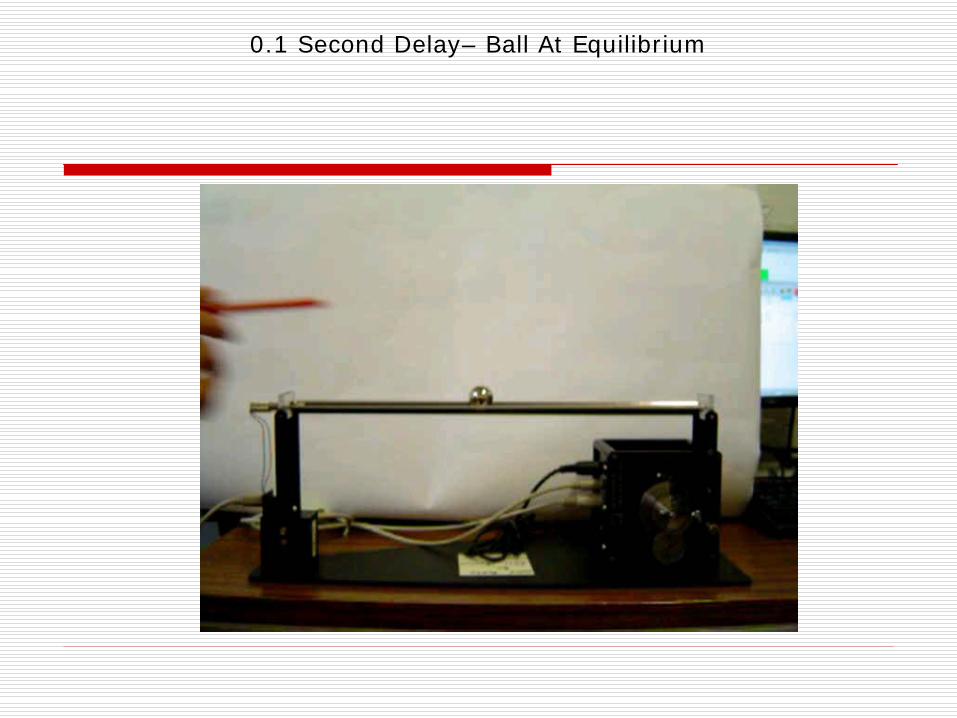
0.1 Second Delay– Ball At Equilibrium
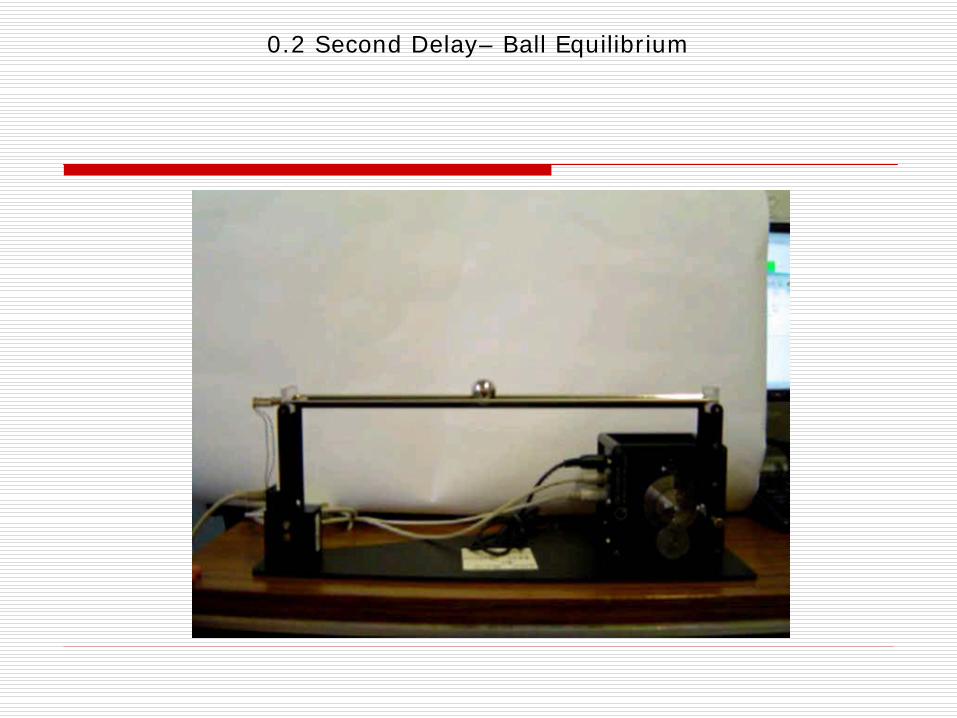
0.2 Second Delay– Ball Equilibrium

Max Delay for Kv_bb
Kv_bb
Del
ay
0 5 10 15-6
-4
-2
0
2
4
6
8
Time (sec)
Posit
ion (c
m)
.1 Second Delay
0 5 10 15
-6
-4
-2
0
2
4
6
8
Time (sec)
Posit
ion (c
m)
.2 Second Delay
0 5 10 15-10
-5
0
5
10
15
Time (sec)
Posit
ion (c
m)
.3 Second Delay

Getting Better
OptimizationEnergy efficientQuickest resultSafest voltage
Improving the ControllerNew degrees of freedom—P, PI, PID controllersHave the computer guess—Penalize the guess
Gain, Too Much of a good thing?Kp=1, Kp=1000

Thank you