februari 19729 - apps.dtic.mil fileh ,p-o•c t 1,0o isu-eri-ames-72023 eri 712-si is zpo . '....
TRANSCRIPT

- 7,
JR. LYANI-ALLEN--
FEBRUAR"I 19729
- ~Techiafl Report ERI"M-23
ANl INCREM ENT,"lA L V E LOCIT YMEASUREMENT ALGOURITH FOR US'E
* i INRTIL NAVIGAT ION ALIGNM"FENT
OFFI1CE OF NAVAL- RESEA.RCZý INFOPMATION SERVICE
DEC0AWTMN4-OF THE NAVY '
WASHNG-TON D C 20360 - .U
This documenthnw been apoved firpub&k rdJs~and wzle. Ut &fce utnibuon ij 'jni&itef
E~d Prelect'71 21-s
Unclassified
DOCUMENT CONTROL DATA - R &D
Engineering Research Institute I UnclassifiedIowa State University
Ames, Iowa 50010
AN INCREMENTAL VELOCITY MEASUREMENT ALGORITHM FOR USE IN
INTERNAL NAVIGATION ALIG*4NTT
Technical Report, February 1972* '.-.ons ,S , 'P- nam. reddl. mmhla* It ga'. .
R. L. VanAllen and R. G. Brown
February 1972 I /0
N00014-68-A-0162h ,P-o•C T 1,0o ISU-ERI-AMES-72023
ERI 712-SI is ZPO . '. thaF fN" t- ~.-tn,
dm
This document is approved for public release and sale: its distributionis unlimited
Office of Navai ResearchDepartment of the NavyWashington, D.C. 20360
In any inertial navigation system the platform must be initially aligned insome known frame of reference prior to operation in the navigation mode. Self-alignment methods are preferred in most applications, and the usual procedure isto align the platform locally level with one accelerometer axis pointing north.In the current generation of aircraft inertial systems the sensed acceleration isin the form of incremental velocity pulses. These are accumulated to yield a measureof total velocity within the granularity of the incremental velocity change. Kalmanfiltering techniques have recently been applied to the alignment problem, the usualmode of operation samples the total velocity at a fixed rate, and the resultingsequence of samples becomes the input to the Kalman filter. Granularity in thevelocity measurement is then treated as uncorrelated measurement noise.
"A new approach to the alignment problem is considered in this report wherebythe incremental velocity pulses are modeled directly as the measurement sequence.This leads to three important changes in the filter model: (1) aperiodic sampling
is obtained; (2) measurement noise due to granlarity is eliminated; an-4.") adelayed state appears in the measurement equati'n. This latter condition forces theuse of a modified form of the Kalman recursive equations. Rcsults of Monte Carlosimulaticns ior one set of noise parameters are given. Ihese indicate that con-sidera'ýe improvement in perfc-rmance may be expected from this technique relative
to the more conventional -ode.ing technique.
DD (PAGE 1) Uncasified
Unclassifiedz .¢Security Ci,..fxd atlon
'4LINK ALI K SLN CI
-1II I I - - II-I
S_ T O tE my
Navigation
Inertial Navigation
Kalman filter
Inertial alig-ament
I:I
* 'I
FORM U. tm. .m IIDD, "w6911473nBACe! N~ IS .. •:.. •:,Unclassified

ENGINEERINGRESEARCHENGINEERINGRESEARCHENGINEERINGRESEARCHENGINEERINGRESEARCHENGINEERINGRESEARCH
TECHNICAL REPORT
AN INCREMENTAL VELOCITYMEASUREMENT ALGORITHM FOR USEIN INERTIAL NAVIGATION ALIGNMENT
R. L. VanAInR.G. Brow.
Febtuay 1972
ce"-w! & "java. R0 .eea'c- iPe i -na' may tin! rnrh*fb flt tt.,f lZ1ite
tDenal-- of menar.. ol Ith United slaunThe.ns, Contract .*00014-68-A 0162
ENGINEERING RESEARCH INSTITUTEERIProlect 712-S IOWA STATE UNIVERSITY AMES

ABSTRACT
In any inertial navigation system the platform must be initially
aligned in some known frame of reference prior to operation in the
navigation mode. Self-alignment methods are preferred in most appli-
cations, and the usual procedure is to align the platform locally level
with one ac:elerometer exis pointing north. In the current generation
of aircraft inertial systems the sensed acceleration is in the form
of incremental velocity pulses. These are accurlated to yield a
measure of total velocity within the granularity of the incremental
velocity change. Kalman filtering techniques hbae reci-tly been applied
to the alignment problem, the usual mode of operation samples the total
velocity at a fixed rate, and the resulting sE-uence of samples becomes
the input to the Kalman filter. Granularity in the velocity weaure-
ment is then treated a- uacorrelated measurement noise.
A new approach to the alignment problem is considered in this
report wihereby the incremental velocity pulses are modeled directli as
the measurement sequence. This leads to three important changes in
the filter mo.el: (1) aperiodic sawpling is obtained: (2) measurement
noise due to granularity is eliminated; and (3) a delayed state appears
in the measurement equation. This latter condition forces the use of
a modified form of t,4,e Kal!an recursive equations. Results of Monte
Carl- simulations for one set of noise parameters are given. These indi-
cate that c¢nsiderable improvement in performance may be expected from.
this technique relative to the mcre conventional modeling tecnnique.

TABLE OF CONTENTS
Page
I. INTRODUCTION 1
Il. KALMAN RECURSIVE EQUATIONS 3
III. MATHEMATICAL MODELS 6
A. System Dynamics and Incremental Velocity 6Measurement Model
B. Incremental Time Measurement Model 20
IV. DIGITAL SIMULATION 23
A. Method of Analysis 23
B. Process and Measurement Simulation 23
C. Delta Velocity Kalman Estimator 30
D. Time Interval Kalman Estimator 34
E. HPHI Subroutine 34
V. RLSULTS 37
Vi. CONCLUSIONS 48
VII. LITERATURE CITED 49
VIII. AC.NOWLEDGEMENTS 50
IX. APPENNDIX A: SIMULATION PROGRAM 51
A. Main Program 51
B. DVWAL Subroutine 58
C. TII-AL Subroutine 62
D. HPHI Subroutine 66
X. APPENDIX B: GRAPHICAL RESTU"TS 70
A. Azimuth Error 70
B. Level Tilt 81
1. INTRuDUMtKIt
Before an inertial navigation system can be used as a reliable
navigation aid, certain qu.antities must be initialized. These include
the vehicle position and velocity and the platform orientation with
respect to the navigation coordinate system. Oviously, the accuracy
tc which these parameters can be determined is a limiting factor in
system performance. If the vehicle is stationary, we presumably know
its position and vAocity essentially perfectly. Thus, these values can
be accounted for in a straightforward fashion.
To align the platform in any coorainate frame, knowledge must be
5*tainec. of three angles, usually those along the axes of the given
coordinate system. For simplicity an x-a.is north, y-axis west, and
L-axis up frame of reference is used throughout this paper. Various
leveling and gyrocompassing schemes are well documented ! I, and will not
be discussed here. Essentially, leveling is performed to align the
platform with the east-west and north-south axes while gyrocompassing
reduces the azimuth or "north-pointing" error.
Traditionally, the azimuth misalignment following an alignment
period has been about an order of magnitude greater than the corresponding
level error angles. In recent ,,ears, however, the use of Kalmsn filter
theiry in iEstimating the above quantities has improved initial aligr=ent
and subsequently increased inertial navigatior accuracy capability.
If a Kalman filter is usei to estimace the platform orientation
angles, the estimates can be used in either closed or open loop form.
The latter method will be assumed and is illustrated in Figure 1.

2
Inertial Navigation
Vehicle System Kalman Platform
Dynamics (including Gyros and FilterF• Misorientation
Accelerometers) Angles
Figure 1. Open loop estimaticn
in this scheme output from the inertial navigation instrument cluster is
processed in the Kalman filter for some predetermined alignment time. At
the end of the alignment interval, platform correctior. information pro-
portional to the misalignment angles is used in the to::-uer motors to
correct any platform misorientation.
In this paper a gyrocompassing technique using a new and unique
incremental velocity measurement algorithm in a Kalman filter estimation
scheae is presented and compared with a system employing a somewhat
standard time inteýrval measurement method with simple periodic sampling.
3
II. KALMAN RECURSIVE EQUATIONS
Two sets of Kalman filter equations are utilized. The first includes
th* "standard" recursive relationships [21 in which the state and measire-
ment models are required to have the format specified below. The system
dynamics are assumed to satisfy the first-order differential equation
x = Ax + Df (1)
This iirst-order equation is then assumed to transfer to a discrete state
equation of the form
X n+l inX + gn (2)
where x 5s the system state at time t n, the state transition matrixn n
at time tn, and g n an ancorrelate,2 sequence representing the system
response to white noise inputs. As in (2), matrix and vector quantities
will be implied as the situation dictates.
The measurement equation is formulated as
Yn = M nxn + 6y (3)
where yn is the measurement at time t, Mn the linear connection wtrix
rela:ing the various states, and 6yn an uncorrelated sequence of measure-
ment noises (white).
Wi.h the system modeled by (2) ane (3) the recursive Kalman equations
are
bn P p MTn + V) (4)
A A Ax' + b ny - y') 5)n n n n n

4
P= P bn(HnPnMn T V)b (6)
A A'+ 'm x n(7)Xn+l n n
Pn-i- an=6?+n (8)
where 6 = transition matrix for interv-al from t to tn+1
x = trae state at time tn n
Ax = optimum a posteriori estimate of x at time t
Ax' = optimum a priori estimate of x at :_ime t
n n
b = gain matrixn
v = measurement at time t
A Ay =Mx
n n nA
= covariance matrix .)f the estimation error (x' - x )n n n
A
P = covariance matrix of the estimation error (x - xna n"
M = measurement matrixn
V covariance matrix of the measurement error, i.e.,n
SVn = E(ýy T)nl II n
H = covariance matrix of the response of the states to alln
Twhite noise drivirg functions, i.e., H. E(g ngn)
Lt = time increment between tn and t +1
The other set of recursive equations used involve the use of a
modified (delayed-state) measurement model. The measurement equation is
Yn = M x + N x + (9)n an nan-i aY

That is, the measurement at time t consist= of a linear connection ton
states at both t and t . As before, the system is described by (2).staesatboh n tnI.
In this configuration the recursive relationships become [i3iJ
b = (PM + P N)Q (10)rt n r n-i n-i1n
A A AX = x' + bn(Y Y) (11)
n n n n n
P = P -bQb (12)n n nn
A, A (13)
n+l Tnn
*p T + H (14)'n+l = n n n n
where
lkjT .T TTQ= (MP'1 +V) +I p N + 'iP 0 +M P NT
= n n n n n n-1 n n n-1 n-i n n n-i n-1 n
(15)
and
A A A
"' =MX' + NX 1 (16)
A derivation of the above delayed-state equations in included in the
Appendix of [F4.

6
III. MATHEMATICAL MODELS
A. System DynarsIcs and Incremental VelocityMeasurement Model
The following development of the system dynamics is essentially
included in Pitman [L] while the incorporation of the new increwentul
velocity measurameat algorithm is taken largely from unpublished notes
by Dr. R. G. Brown of Iowa State University.
The basic equations that describe the inertial system error propaga-
tion for a stationary vehicle are
Sv -zy =x (17)
Equations ty + " -4 =e (18)
'z + x X C z (19)
"266 + -z 6e + W (60 + Vy 6a /R (20)
Schuler y z x 0 y + x
Dynamics 2"L 205ý 5 M - Z6' + w (60 +x)=- 6a /R (21)x z y o x Xy
where
ix ,Y6' 6 = actual platform coordinate frame errors
* 89 69 , 69 = computer coordinate frame errors
-69
A'x, 44 y' ,z = angular earth rate components along the
x, y, and z axes respectively
'Ex, Cy, Cz = gyro drift rsce (bias) errors
Fa 8a = accelerometer bias errorsx y

7
R = radius vector from the center of the
earth to •rue vehicle position2w 2 local gravity vector, g, divided by the
0
earth radius vector, R
The above angles are illustrated in Figure •'
Z* Z' ~x, y, z = Ideal coordinate
(up) system
x', y', z' = Actual platformcoordinates
x*, y*, z* = Computer platformcoordinates
-y*
y (west)
x ZI i
(north) 0. I
Figure 2. Coordinate system relationships
It should be noted that a third Schuler equation involving 60 is notz
included because the vertical error is assinmd to be zero. IThe physical quantities that we desire to estimate in our Kalman
filter are the level tilts (4 and 6 ) and azimuth e:ror (6 ). Thesex y z
angles can be inserted into the system equations through the relation
2A

8
6 = * + 60. The effect of knowing position perfectly is that 69 = 0.
Thus, an = j and (17), (18), and (19) become
'x -r y (22)
6 +z•6 -C = (23)y z x x z y
+ 6 =C_ (24)z x y
For the purposes of this study we make several simplifying assump-
tions. We first assume that so-e sort of coarse aligrment has taken
place such that the level tilts are relatively small as compared with
aziumuth error (statistically, at least). Also we let the gyro drifts and
accelerometer biases be zero (i.e., we assume perfect instruments).
Then (22), (23), and (24) become
x 0 (25)x
; -Ai '6 0 (26)y x z
Z6• 0 (27)
An explicit solution can now be written for 6 X 6y' and 6z"
ix(t) = 6x (0) (28)
() = 6 z(0) (29)z
tS(t) = aQ 6dt + 1 (0)y ' xz y
0
= 6 6 (O)t +•6 (0) (30)x z y
or

9I
1 0 0 46 (0)x xzero
4y = 0 1 0Oxt Ay (0) + driving (31)
0 0 1 0function
L zL0 J -0
These, then, are the ba3ic state equations.
The measurement model must take into account the "real-world"
accelerometer mechanization. Basically the accelerometer emits a pulse
nhe.ever a predetermined increment in velocity (integrated acceleration)
is reached. Physically this can take the form of an integrator at the
acceleuoz-eter output. The integratcr is used in; conjunction with a
threshold detector that emits a + LV pulse whenever the preset threshold
is reached. When the delta velocity pulse is emitted, the appropriate
positive or negative LV increment is fed back, ideally resetting the
integrator to zero. An example of an integrated acceleration functior
and the corresponding sequence of LV pulses is shown in Figure 3.
IntegrztedAcceleration
tIt 2 t 3 * Time
Accelerometer V ' [
igtput tegrted cl in Tio e
Figure 3. Integrated acceleration function

K10
Note the nonuniform time interval between pulses.
Using the open-loop correction scheme dihcussed ..bove, we want to
estimate the level tilts (6 6) and the azimuth error (6) based on
a sequence of AV measurements that occur in a finite interval of time.
Explicitly the LAV measurement is (for both accelerometers)
tn
a (t)dtt n -1I
andt
na (t)dt
x y
Now
ax g6 -gy + (Noise) x (32)
a= g6x + (Noise) (33)
y y
Using (31), (32), and (33) the problem decouples as foll s
6 6 (0) Process Modelx xEast-West i
Nort'h-South I6 I 1o 0 roes HdCiar-nel _3z 0 1 6 [.(O)
I = gi + (Noise) Measurementy x
At this point we will d_!velop only the north-south measurement equations
as that channel furnishes the informtion concerning azimuth error. The

east-west derivation proceeds in an analagous fashinn and will be
omitted.
The actual measuremnt is
t
a dtl-n-l
Writing this out explicitly we obtain (from (32)),
t t tn n n
a X(t)dt - gi (t)dt + noiset n-I t n-I t n-I
Substituting for 6 (t),
t t tn n n
a (t)dt=- g ( [i (O)t + 4(O))dt+ noiseSx: ytn-1 tn-1 tn_1
P- . A (0)(t •- t2_ -g6(o)(t -X z n n- y n n-I
t
n noise (34)
tn-1
NOW Subst ituting
y (0) = 6 (t) -0 xz t
= (t)) 6 ty n x zn
and 6 (0) 6 (t ) into (34) we obtainz n
a (t)dt=- g)(t 2-t 2 -g (t 04)6t )(t t )x xz n n-i y a X n n-iSt n-i t
+ noise (35)
tn-l

12
Rearranging (35)
tr• n
>>J t a x (t)dt TMg 0 x z (t n t n-1 t n n+t n-1 )J
Sn-L t ngy(t )(t t + noise (36)
J tx- xzt
Nc let t - = n At . Then
tn 2
ax(t)dt = ( g At2n)4 z( tn) + (- n t)y(tn)tnI ttn I+ Itn noise
(37)
n1-1
Equation (37) is now in the correct measurement format except for the
noise term.
To account properly for the integrated noise tern in (37), let us
assune that the major source of noise is random lateral motion of the
vehicle plus white instrumnt noise. Although lateral notion was ignored
in the systen process derivation, it is an important noise source due
to wind buffetirg, loading, and gt.-eral random motions that occur to the
vehicle. In deriving our noise model we will let the vehicle be an
aircraft, thus knowing that there is no appreciable net random motion
(position) when it is stationawy on the ground. At the acceleration
level this is a special type of noise; it is such that the double integral
of the acceleration noise is bounded, and is thus a stationary process.
Therefore, let us asst.w that at the position level, the process is
shaped .arkov. Then, so that acceleration and velocity have bounded
variance, w-e postulate the model shown in Figure 4 (position that is

13
Markov shaped by a secored-order filter). Note that position, ve!ocity,
Unity 2-AccelerationWhite r_______ NoiseNoise n1(7N
sf -3 J2nlt
position
Figuire 4. Noise model
2.and ac :eleration all have bounded variance- with the parameters j 5, >
Xrand r chosen to fit the physical situation at hand.
The second part of the integrated noise term~ is the con-tribution
due to instru-ment noise. This noise is assured to arise from the basic
acceleren'eter itself (e.g., proof mass jitter due to noise from the
serVo electronics) and thus appears as integrated acceleratic-n noise
at the instr=u-nt output. We will assume that the basic acceleration
noise i3 white, thus the acceleromter output is a random valk process
as shown in Figure 5. K1 is choasen to fit the physical situation.
The randon walk process is described b~y the first-order differential
equation
n2(t) =v(t) (33)
lategrating, we obtain
i, (t) n 2(0), + h(t)(Driven Response) (39)

14
or in difference equation format
n =n + h (40)n+l 2 n
where h is found by forming the convolution integrz1 [510
ist
hn J y(u)v(-t-u)du (41)0
y(u) is the weighting fuaction of the filter (i.e., the inverse Laplace
transform of l/s),
Instrumnt Noise Acceleration NoiseV(t) n2(t)
(white noise-amplitude tn)
Figure 5. Instrunent noise random process
Y(u)= ls) (42)
"Then
h 1-v(bt-u)iu = 0 (43)n J
0
since the white noise input v(t) has zero mean. Also,
At £1th2 -h 2 y(u)y(w)v(At-w)v(ý,t-u)dudw (44)
0 0
and At AtSh2 . . -5
h n= y(u)y(v)v(•-tu)v(Lt-w)dudw (45)
0 0

15
Since v(t) is white noise with amplitudeK1 , v(t-u)v(t-w) K -N (u-w).
where 5( ) is the Dirac delta function. Trhen
L"t At
hn . (-4-6)6u-w~du&; ( 6
0 0
Using sifting integral theory,
Lt
h 2 = IdS -1K
0
= K 1t (47)
Thus h can be represented by an uncorrelated sequence of Gaussian randomn
variables with zero mean and variance equal to K lt.
Let us now assign states to the physic;,l quantities to obtain the
correct process model format for r.e Ka mar filter. Let
xi = 6 ( 48)
x2 = z (49)
Figure I' can be redrawn as
2 AccelerationNoise
I, 2 2
(Unity (s + *)(s + 2w • s W r) z(t) Noise
White _____________ __
Noise , 1- PositionNoise
Figure 6. State formulation of noise model
i
3

16
Now let
x4 = z(t) (position noise) (50)
x4 = z(t) (velocity noise)
x (t) (acceleration noise) (52)
The basic differential equation is
2 2-(5 + 2Cw r) + Ur + 2w )z +5u z = f(t) (53)
Then in matrix form we have
x3 0 1 0 x3
x 4 0 0 1 x4
2 2 u -(5+2rCL r r r -+2r L 5
F 0+ 0 (54)
W r .B'• f(t) (5J
Equation (54) is in the standard state variable form of Equation (1).
Thct state transition matrix can now be found in closed form from
[(t) =t'E(sI - A)-l (55)
where I is the identity iatrix. Each term of 6(t) is of the form
Kie e + Lij e rsin (Wr + j) (56)

& 17
2where K L and 9.. are functions of . ," , and .
Tie driven responses for the states (gn) can be found in closed
form by again forming the convolution intiegral
t
x.(t) = y•i(u)f(t-u)du (57)2. 1
0
where yi (u) is the weighting function between f(t) and the state of
interest, x.. Then
t
x.(t) = = (u)f(t-u)du 0 (58)0
nndt t
x 2(t)- yM(u)y(v)f(t-,i)f(t-v)dudv (59)0 0
2
as before. x2(t) again indicates taking the expect.:d value. Since f(t)
is unity variance white noise, f(t-u)f(t-v) is just 6(u-v). Equation (59)
then becomes
t t2
x.(t) = - Yi(u)yi(v)5u-v)dudv (60)1
0 0
-2 (v)dv (61)
0
T-hus the driven response for cach state, xi, is a random variable with
t-2
zero mean and variance equal to y (v)dv, where we let t = at.
0

18
Recapping, then,
X (3,3) ] "3
,5,5)II Inx+l (Transition + g4
Matrix)
"xS n+lL x5 g5n n
The last state to be considered is described by (40). Here we let
n2 = x6 and hn = 96 " Thu.n n nF x = x6 + g6 (62)
n+l n n
Finally, combining all six states in matrix form,
i . Lt 0 0 00 rx0
0 1 0 0 0 0 0
0 0= n0(3,3) 1 x + n (63)
0 0 : through iO -n4 n0 0 6 (5,-)10 9
L I n0 0 0 0 0 g6
The process model is now in the correct format.
Returning to the measurement equation, (37), we now write
t-n
n- 2
tn
+ (Accelerometer Noise)titt

19
IBut th- integral of accelerometer noise is just x1 + x6 , thus,
y(t, )= (-stn)xl(t ) + % 1gxt 2 )x2(t
+ X4 (tn) - x 4 (tn 1 ) + x6 (tn) - x6 (tn-1 ) (64)
Note the delayed states in the measurement equation and the absence of
the "standard" measurement white noise. It should be noted from (62),
however, that x 6 (tn) - x6 (tn. 1 ) is just g6 (tn-1 ) or an uncorrelated
sequence of Gaussian random numbers :Tith zero mean and variance given
by (47). Thus this quantity could be accounted for in the me..surement
equation by denoting it as 5yn (measuretent noise:. Then (64) becomes
y(t) = (-g~tn)xl(t ) + (ýg Att2)x 2 (t)
+ x4 (tn) - x 4 (tn 1 ) + by(tn) (65)
Including state six as a noise contribution ia the measurement equation
contains a significant advantage when implementing a recursive routine
as this technilue reduces the dienionality of the problem by reducing
the order of the state process. However, (64) will be considered the
measurement equation for purposes of this paper because, zs will be
shown later, the incremental time measurement noise cannot be handled
as in (65) above.
The model is now complete for us_- in the delayed-state KilmanA
recursive equations, i.e.,

20
xt2Yn =[g~t n •g :ixAtn o I o I x nn xn
I+LO 0 0 -I 0 -ii Xn1 (66)
Also note that each measurement Y. is either a positive or negative delta
velocity quantum and that the measurement time interval, at n, is non-
uniform and varies as the process evolves.
B. Incremental Time Measurerent Model
As seen in the previous section the incremental velocity algorithm
involves delayed states and nonstandard time intervals. Schemes used
for Kalman filter gyrocompassing in previous studies have employed other
measurement models, usually involving a -.niform time interval. One
such model is described in some detail in [67.
In this model the output pulses frcm the accelerometer are stored
in a digital pulse count register. The register is then sampled at some
uniform rate to furnish the Kalman filter measurement. The pulse count
in the register, then, is a measure of the total velocity (integrated
acceleration) and not the incremental change. The measurement equation is
t
y(tn) -8 ;6gydt + (lategrated Acceleration Noise) + n (67)
0
The first term is handled as in the previous section except that
the time interval between measurements, At, is replaced by the total
elapsed time t. The second quantity in (67) is just x4 (tn) + x6 (tn)
as derived in Section A. Notice that the instrument noise, x 6 , must be

21
handled as a state since it is a random walk process and not a sequence
of uncorrelated random numbers. The n m term represents the quantization
error at each sampling of the accelerometer pulse count register.
Figure 7 illuscrates the measurement procedure for a typical member
function.
The registers are sampled at uniform At intervals and it can be
seen that the measurement may be in error by as much as + AV. Although
this measurement noise is not normally distributed with zero mean, and
is, in fact, uniformly distributed, the qiantization error is assumed
IntegratedAcceleration AV [ I
t I t2 Time
Pulse 2AV ms tCountRegister AV
t I t2 Time
SamleOatput 2AV4(at-At [!
intervals ) AV !
At 2,t . . . Time
• Figure 7. Time interval measurement

22
to be normally distributed [6j. Thus n is assumed to be zero mean
Gaussian white noise with variance (tAV)2. Letting na 6y0 we now
write (67) as
Y(t)= [-gt kfg 0xt 2 0 1 0 1J x(t ) + 6yn (68)
Equation (68) is now in the required for t for the standard recursive
Kalman equations. 6y is the measure~int noise with variarsce (AV)2'L

23
IV. DIGITAL SIM:I: TIOh
IA. Method of Analysis
Evaluation of the new incre-ntal velocity algorithm using any sort
of analytic technique is, at best, very difficult. For this reason,
comparison with a =ore or less "standard" estimtion technique was chosen
as the best means for evaluating system perforiance. The approach taken
was to simulate the physical random process and use both estimation
techniques simultaneously. At the end of some predeterxined alignment
time the ability of the estimators to determine the actual value of the
azimuth error and level tilt was compared. Ten Monte Carlo simulations
awere performed to establish some measure of statistical validity. The
S~actual computer program -*ed ior the si~mulation is included in Appendix A
while a flow chart illustrating program organization and the various
functional blocks is shown in Figure 8.
The program itself consists of four sections, those being the main
program and three subroutines. The main progiam simulates the physical
sytem and the delta velocity and time interval measurements while the
subroutines handle the Kalman estimation and the computation of the state
traxisition and H matrices in closed form (the H matrix is the covariance
matrix of the state response due to the white noise inputs).
B. Process and Measurement Simulation
The system is modeled by the difference equation described by (2)
and uses a delta time interval of one millisecond (Table 1). It should

24
System Process Initial Conditionsxn+1 =4 xn + Dn u n and Parameters
Actual Integrated Acceleration Function
S(-g-t)x I+ (k xtZ)x2 + x4
I ntegrated Acceleration from the Accelerometer
(-g-t)x 1 + ( x xt 2)x2 + x4 - x 4(0)
, . ,+ ResidualL Initial Condition
Pulse Count Register Output (above functionquantized into + &V steps)
Has Register Wtput Changed by AV?
Yes NoJKalamn E-stimotor Using
Velocity Measurement Algorithm
Has Time Increased by Uniform
Time Interval?
No Yes
Ka•lman Estinator Using
Tine Interval ?IeasurseqntA lgor ithm
Figure 8. Computer flowchart

25
be noted from Appendix A that XY. is not computed in a standard iteratiwe
m-nner from
Xlx + (69)ln+l n •xtXn
The second term in (69) is very small (typically 2 x 10-6) and when x
becomes large the technique is inaccurate due to round-off errors. This
problem could be handled by using double precision techniques or by
computing the second term at each iteration and adding it to the fixed
initial x 1 (0). The letter approach is utilized in Appendix A.
For purposes of the simulation we assue that the accelerometer
instrument noise, x6 9 is zero, i.e., again we assume perfect instruments.
Thus on.y five states are simulated in the program The state transition
matrix is computed from a-If (sI - A)- 1 ] as explained in Section III.
Noise parmeters chosen to fit the physical situation are included in
Table 1.
Table 1. Noise parameters
Parameter Value
222 9.0 inches 2
0.1 sec-1
0.5
w r 0.1 cps 0.2ff radians/second
at 0.001 second
latitude 40° N
TIC

26
The selected parameters represent a vehicle placed in a reasonably
benign environment. Aa exaple of this situation might be a large
flexible aircraft sitting on a ramp with moderate vi-nd, Loading, etc.
causing some random zotion. The Lt increment is chosen so that the
process looks essentially continuous with respect to the system dyramics.
Closed form equations for the state transition matrix using the above
parameters are given in the main program and HPHI subroutine and are
included in Appendix A.
Since we performed Mcnte Carlo simrlation, random initial conditions
were supplied t• the process for each run. Uncorrelated unity variance
random numbers with Gaussian distribution were available on magnetic tape
and were transformed via the Schmidt orthogonalization procedure 7, into
initial conditions with the desired variances and covariances. In order
to accomplish this, let zl, z 2 , z3 , z4, and z. be uncorrelated, unity• :~)-
variance, zero tean Gaussian random variables. States xI and x2 are
decoupled from the other states and are assuned uncorrelated. Their
assumed variances are (1 m=n)2 and (60 mi) I respectively, thus we let
x (0)
and
x2 (0) - 60 z2 (70)
States x3 , x4, and x, are not uncorrelated. Thus these initial conditions3-
must reflect the appropriate cross-corre:ation. Let

F! 27S(0) z3 a2 a "3
3(O 31 [a 23 31 I
x(O) -- c z4 b b bb 4 (71)x4 (- 4 1 2 '4
x.(O) zC c2 c3J z5 j
with a 2 , a 3 , ar.d b3 set equal to zero. Then
x 3(0) = a z3
and
x2(0 = 2 2 2x(0) = az = a 1 (72)
This, then, specifies a1. In a similar manner
0
x3 (O)x4 (O) = alblz3 + a = a b (73)
as z3 and z4 are uncorrelated and z 3 has unity variance. Since a1 is
specified by (72), b can aaw be found. The remaining members of C may
be obtained in a similar fashion.
c : .69 0 (74)-"161 0 .438 :
Although the terms in the g column vector were derived in Section III,sn
the use of some small time interval approximations sit*plify the computa-
tional effort (the derivations in Section III will be useful later in
computing the H matrix). If the system is described by (1), then,
integrating x yields
• • , •. . . • • , j • , m ~ m • • i ,• . • " • • ' • ' ' • • " ' • • .. .... .... " . . . .
28
At At At
x dt A(t)x(t)dt + Df(r)dt (75)
0 0 0
For small At,
At
A(t)x(t)dt • A(t)x(0)At (76)
In addition, D is independent of L, so (75) becos
At
x(At) - x(O) =A(t)x(0)ft + D f(t)dt (77)
or
x(t) (. (I + ALt)x(0) + Du(Mt) (78)
where
At
u(ft) = f(t)dt
0
In difference equation format
x rfeIz (I + A~t)x n+ Du n(79)
To simulate u we taken
A t At
u2(At) - f(u)f(v)dudv (80)
0 0
or
At At
u (Lt) 6(u-v)dudv (81)
0 0
If 29
since f(t) is unity white noise. Evaluating the integral as before
u (At) At (82)
Thus u is simulated as an uncorrelated sequence of normally distributed
random numbers with At variance. Comparing (79) with the difference
equation fe.mat, (2), we see that
gn D Dn (83)
where
0
0
D 0 (84)
D appears here as a single column vector with five entries since, as
previously stated, we ignore the accelerometer instrument noise.
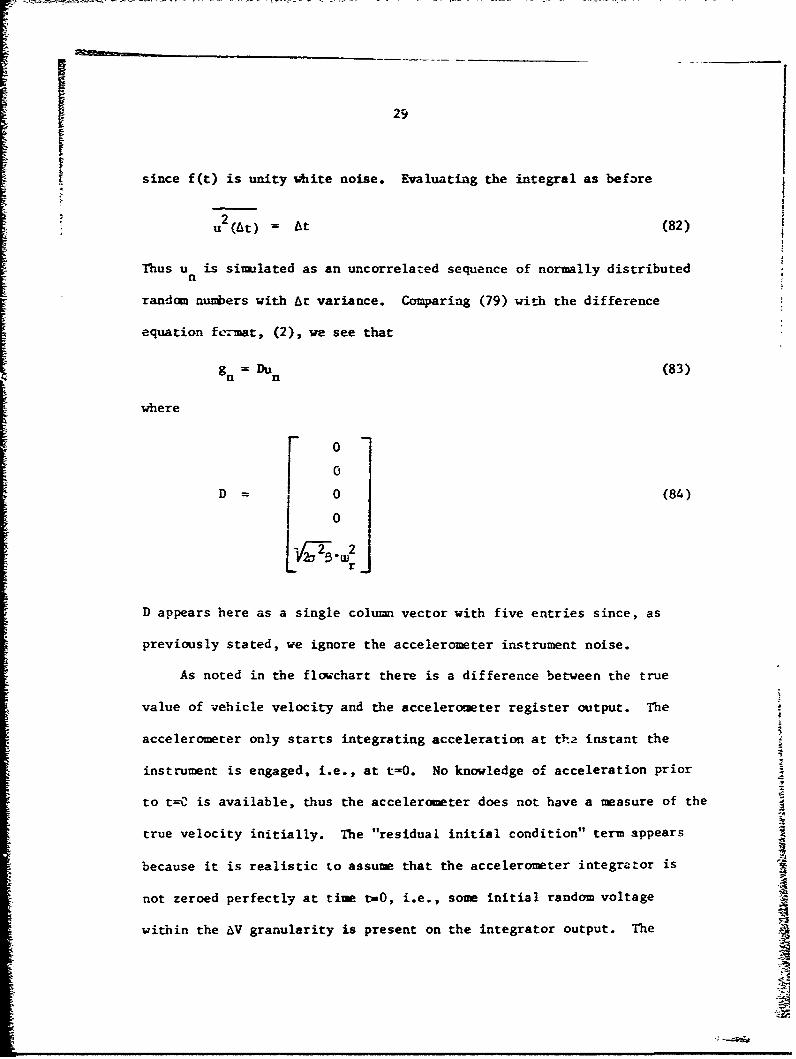
As noted in the flowchart there is a difference between the true
value of vehicle velocity and the accelerometer register output. The
accelerometer only starts integrating acceleration at thŽ instant the
instrument is engaged, i.e., at t=0. No knowledge of acceleration prior
to t--.. is available, thus the accelerometer does not have a measure of the
true velocity initially. The "residual initial condition" term appears
because it is realistic to assume that the accelerometer integrator is
not zeroed perfectly at time t=O, i.e., some initial random voltage
within the AV granularity is present on the integrator output. The

30
relation between these quantities for a typical velocity function is
illustrated in Figure 9. The AV quantization ,:sed for the siwailation
is taken to be the same as in :6] and is listed in Table 2.
C. Delta Velocity Kalman Estimator
The subroutine DVKAL is used to implement :he incremental velocity
Kalman estimator. The recursive equations used are slightly modified
from those given in (10) through (16). The relationships are
It A
X, = lnl - (85)
x = ++ - Hn (88)
b = P - ILI T (89)
n n n n
with the quantities as previously defined. Modification is required
because the "step-ahead" feature of the Kaluan filter is not possible,
as the time increment between neasurements is not known until the actual
measurement is made. Thus, it is not until time t that we have accessS~n
to the value tn - t . lThe a priori estimates of xn and Pn are
obtained at tn by evolving the optimm estimates at t through (85)
and (86).
31
Integrated ru"itgaeAcceleration Acrelegrateon
(0) Instrumment Integrated4 - Acceleration ("True"
x 4(0) + Residual Initial
Condition)
SPulIse Reggis ter
=-• output
Residual
InitialCondition -____.+
Time
Figure 9. True velocity and accelerometer output
Certain initial quantities are needed to begin the recursiveA
routine. As seen from (85) and (86). initial values of Xn.I and Pn-I
as well as values for Hn-i and in-1 must be obtained. Since the means
A
of all the states of x are zero, x n-1 = 0 is chosen as the initial best
estimate of the states at t-0. The values for the elements of the initial
error covariance matrix are chosen to be the steady-state variances and
covariances relating the various states. We assiue that the initial
"coarse" alignment period has reduced the level tilt (x1 ) to a value

32
Table 2. Quantities used in the simulation
DVKAL
[1 0 0 0 0
103600 0 0 0
Pn[(Initial) 0 0 8.808 0 -. 47741
0 0 .47741 01
0 0 -. 47741 0 .2184 j
Pn-l((,I) in (Uinutes of arc)2
P .1(2,2) in (minutes of arc) 2
n-1
p 1 (3,3) in (inches)2
Pn-1 (4,4) in (inches/second) 2
?n1(5,5) in (inches/second )2
V = E(iy AT) (.IAV) 2 = (.0394)2
m = (-gbt ½gQ2 t2 0 1 0)n n x n
N = (0 0 0 -1 0)n
Axn-1 =0
AV = I cm/sec = (1/2.54) in/sec
TIJAL
P* (Initial) = Same as P aboveSnni
2 2 2 2V = (V) (1/2.54)2 In2sec
n2
m =(-gt 2g.• t 0 1 0)A= x
fLt 1 I c'cond

33
having a standard deviation of one minute of arc while the azimuth
error (x2 ) is assumed to have a standard deviatiot of sixty minutes ofz2
arc. Although we assume zero initial cross-correlation between x1 and
x we must take cross-correlations of the noise states into account as
the white noise driving function distributes itself inti these states
as the process evolves. Values for these steady-state noise variances
and covariances may be obtained by choosing some arbitrary F matrix- n-i
and letting (86) evolve until the values converge. Note, however, that
as time approaches infinity 4 approaches zero, thus P (t isn-i an
equal to H (t - a). These values are readily computed via the HPHIn
subroutine (discussed in E below) and are given in Table 2. The Hn_1
and 6 n-lmatrices are obtained from the HPHI subroutine each time the
equations are used. Other quantities needed for the estimation are
Vn, Mn, and N and are included in T-ble 2. As noted in the table,
V is not 4ero as was assumed in Section III. The desire to insure an
"safe" measurement model for the simulation led to the addition of a
small amount of measurement noise. If the measurement noise is zero
we see from (15) that as P-I decreases, Q becomes very small. Since x
and x2 are deterministic, these elements of P eventually approach
zero making the value of Q subject to computer round-off error. Q can
in fact become negative, causing the Kalwn estimation to diverge. In
addition to the divergence problem, almost any physical situation has
some small amount of random noise nresent at the measurement. The
addition of the measurement noise thus makes the neasurenent u-,del
"safer" in a physical sense. The magnitude of the noise is assumed

34
to be 10% of the incremental granularity.
Since we asswm that the accelerometer integrator is not perfectly
zeroed at t-O, the first AV meacurement must be ignored as the At time
interval at the time of the measurement does not correspond to a true
velocity increment.
D. Time Interval Kalman Estimator
The TIKAL subroutine is included in Appendix A and implements (4)
through (8) to estimate the various states. The accelerometer pulse
count register is assumed to be sampled every second rb6 (i.e., At I
second), thus H and 6 are constant matrices with values obtained fromn n
the HPHI subroutine. The initial a priori estim&::e of xn is chosen to
be zero while the initial error covariance matrix, P , is obtalined as
in Part C above. These and other quantities used in the estimatton are
given in Table 2.
E. H1II Subroutine
The HPHI subroutine computes the state transition (PHI) and driven
response covariance (H) matrices in closed form, given a specified time
increment. As previously stated, PHI is obteined from the inverse
Laplace transform of (sl - A)- and in general form is
1 0 At 0 0 0
x
0 1 0 0 0
0t)= 0 0 6 (At) (90)1 33
0 0 I through
L0 0 65 5 00

35
As noted in Section III 63 3 (ft) through 05 5 (0t) are of the form (56)
where Kij., Lij and 9iJ have been previously computed and are functions
of C, f, Wr, anda .2 rI•. T
The H matrix is defined as E(g gT), the covariance matrix of then n n
state response due to the white noise input. The first two states are
completely decoupled from the white noise input, thus the corresponding
elements in the H matrix are zero. The variances and covariances relating
the final three states are obtained by forming :onvolution integrals in
the manner of (57) through (61). In general,
AC At
gig. = xx = Wj Y.(u)y.(v)6(u-v)dudv (91)
0 0
At
"iy(v)y (v)dv (92)
0
where yi(u) is the weighting function relating f(t) and x.. The various
weighting functions are obtained from Figure 6 with (92) having the
g- neral form
- 2 4[K e-2BAt• -- •g2g. r
-L (•eKw,)At [-(f+Cw) sin (-,t+) - cos (DMt*iC
13 C
I(1) t- t
-(54-tr)At [-('-tr) sin (DAt+Oj) -r ( cos ( )At+6 )+ Mij e j
SLC
t.
k3

36
+ Nij Cox eL -j -2CW r
(93)where
C + . 2 + 2C2r5 + W2
r
and
The constants Kij. Lij" Mij% NIj, Pij, and 6. are again precovmqutedand are functions of C, 9, 0, and c2

37
V. RESULTS
The performance of the incremental velocity Kalman estimator (DVKAL)
was evaluated by comprison with the "standard" time interval (TIKAL)
system. The results of the ten Monte Carlo simulations are shown graph-
ically in Appendix B. The DVAL and TIKAL estimates as well as the
true values of states one and two, are plotted versus time in these
graphs. In addition to the state estimates, of course, the Kalman filter
also computes the error covariance matrix. These error covariance term
for level tilt and azimuth error are averaged over the ten runs and
plotted with the actual squared error in Figures 10 through 13.
Two factors mast be considered when evaluating system performance,
these being the accuracy of state estimation and the speed at which this
accuracy is attained. Examining the azimuth error estimation curves in
Appendix B, we see that in every case the incremental velocity (DVKAL)
estimator is st perior or equal in both accuracy attained and speed of
response. Trarsients that appear In the individual runs are due to system
dynamics. The t.stimates and trt'.- values for the azimuth e:-ror at the end
of the alignment period (300 seconds) as well as the RVUS estimate errors
are given in Table 3. If we define the acceptable "criterion-of-goodness"
as estimating the azimuth error to within five .zinutes of arc, we see
that adequate performance is attained on only three -if the TIKAL runs.
This also is illustrated by the RMS error tera- which is greater than the
required bound. In comparing the response times, we observe from
Figures 12 and 13 that the average square of the DVKAL azimuth estimation
error is within the desired bound (25 mn 2) after approximately 200 seconds

38
*0Lhi
0
Cc- 00-
-in
0
0 0.
N0
0* C
0 0:
00
0
00*1~~,- SU -DGZo0*
(?.NIWIuiC *Ztns O U

39
0
w0
0
w~ci
ki
m 0
oo
00LnI
> 0
o 0
SU 2* 00
(EN IW) 03tinosUDUU

40
etcJ
kJM
0.- n.
m -6-
"~~ 1facJ
0 W-100
wJ oo0
0
oLA
C.'i
in ,.
00'h 00 0, 2 o"I o oI to1XI 2N IW) 03"utnns QU0

4 41
cic
cy 0
""Jo
bit
-i
w0
cc
0
0
0 ;6
0
0
1-.
cn
~50
00'h Dot~ 00,2 0 1 00,0~O~') NIWJ OJutffnJs UOQUU3

42
Table 3. Azimuth. error (minutes of arc) after 300 seconds
Run True Value DVMAL Estimate TIKAL Estimte
1 47.208 45.239 57.320
2 89.544 87.214 91.554
3 -5.046 -5.262 -8.219
4 33.240 32.650 39.217
5 -47.490 -47.280 -54.528
6 -81.720 -82.121 -83.994
7 13.332 12.240 4.174
8 42.780 40.228 33.007
9 58.116 54.924 64.869
10 -106.248 -104.198 -112.373
RMS Error 1.789 6.856
while the TIKAL error never reaches an acceptabie level.
Results for the level tilts aze similar except that the estimate
is obtained more rapidly. The reason for this is that the only measure
that the Kalman filter has of azinuch error is its connection to the slope
of the level tilt. Thus we expect that th- filter must first estimate
the tilt correctly before it is able to accurately estimate the azimuth
error (which is constant).
The above results are not surprising as the TIKAL measurement algorithm,
in effect, models the physical situstion incorrectly. The signal phymrically
available to the TIKAL estimator is a measure of the total integrated

43
acceleraticz. from the acceleroeter (Figure 8) and is dependent upon
x 4 (t) and x4 (O). Since the estimator has no a priori knowledge of x
its best estimate of x4 (0) is zero. Thus we suspect that as x4 (0)
becomes larger the performance suffers accordingly. The DVKAL scheme
is not affected by this problem as it uses an incremental measurement
and estimates the necessary present and delayed states.
Another source of error is the "residual initial condition" which
is the randoui initial voltage on the accelerometer integrator. We see
from Figure 9 that the resulting integrated acceleration function is not
zero initially as is assumed in the TMKAL estimator. Since the DVKAL
technique ignores the first AV meaaurement, errors due to this residual
quantity are also avoided.
The random values used for x4 (O) and the "residual initial condition"
as well as the final squared difference between the azimuth error true
and estimated values are listed in Table 4. The actual numbers listed
for x 4(0) and the "residual initial condition" are unity variance random
numbers with the necessary additional scaling shown at the top of the table
(the "residual initial condition" does not have a truly normal distribu-
tion as it is not allowed to exceed toe granularity AV). As seen from
Table 4 there is a strong correlation between large final errors in the
TIKAL estimation and high initial values of x4, thus verifying our
previous suspicions. This effect is illustrated by taking simulation
Run I (which had a large value for x (0) ) and setting x4 (0) 0. The
result is shown in Figure 14. By comparing Figure 14 with the corre-
sponding graph in Appendix B, the dramatic improvement in performance

m44
6L-
10020
z
W0
U,
0xn
09* 0G2 o~- O'L ,?I
lotx (WII WUU3 inw zf
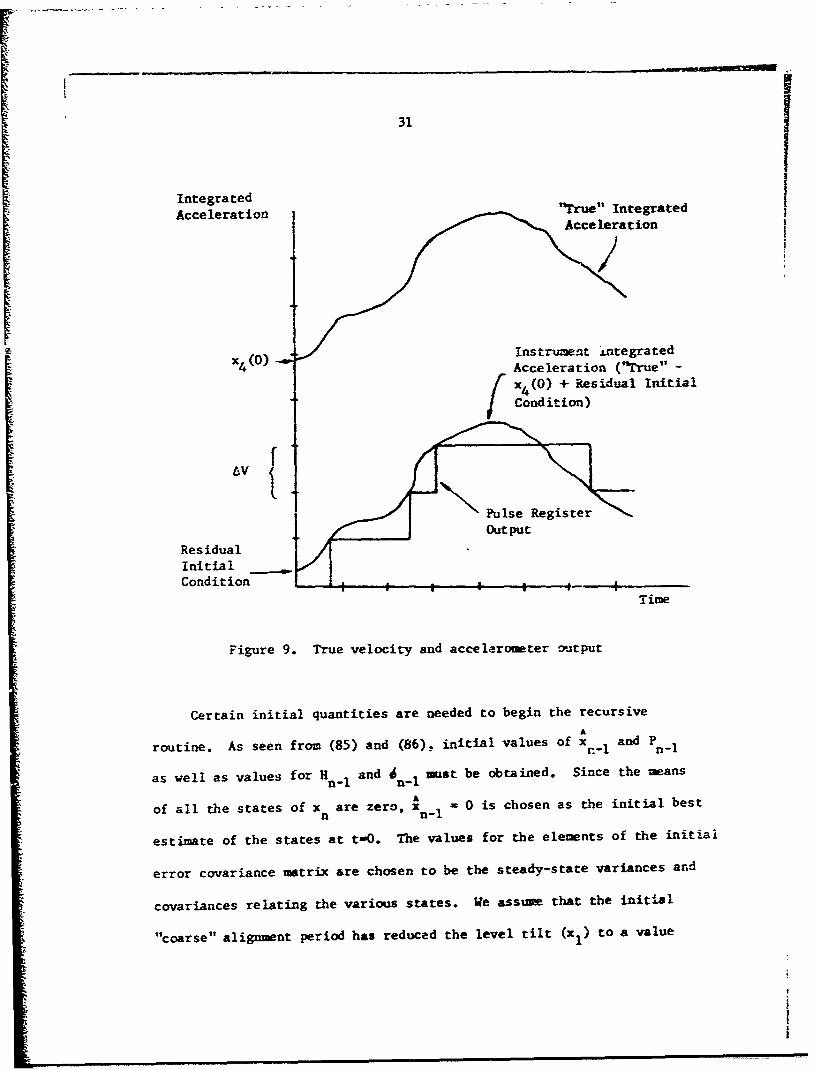
45
Table 4. Final simulation errors (minutes ) and selectedinitial conditions
Run MVKAL TIKAL x4 (0) Residual Initial
Error Squared Error Squared (XO.69) Condition (x AV)
1 3.876 102.243 -1.215 -0.384
2 5.429 4.039 -0.016 0.490
3 0.047 10.067 -0.153 -0.735
4 0.348 35.730 -0.644 0.988
5 0.044 49.533 0.827 -0.064
6 0.161 5.173 0.343 0.042
7 1.192 83.860 0.894 -0.195
8 6.511 95.516 1.317 0.707
9 10.187 45.603 -0.191 0.969
10 4.202 37.513 0.312 -0.682
is evident. Note that the DVKAL performance is essentially unchanged
thus supporting our earlier allegation that the DVKAL estimator is
primarily independent of x4 (O). Similar results are observed by setting
the "residual initial condition" equal to zero in runs which originally
had large values for that quantity.
A possible source of error in the DVKAL estimator arises due to the
measurement noise which is added to the routine to insure a "safe"
measurement model. It is possible for this added noise to slow the rate at
which the co-zariance terms decrease and thus increase the uncertainty
g• • • • am m • • • me m m • • m ima •4,

46
associated with the state estimates. In (15j and (10), the added noise
decreases the gain, b , thereby weighting the measurement term less.
Improvement in MEAL performance for Run 9 is illustrated in Figure 15
by setting the measurement noise equal to zero. The DMKAL response with
noise equal to 10% of AV is included for comparison. Thus, at least
for one run, improved performance does result from decreased measurement
noise. This means that a smaller value of measurement noise should have
been chosen for the simulation. A study was not conducted to determine
optimum magnitudes for this noise and the value selected was done so on
a purely heuristic basis.
From Figures 12 and 13 it is observed that the TIKAL covariance
quantities approach zero faster than the corresponding DVKAL values.
This is primarily due to the aforementioned DVKAL measurement noise and
(for the process selected, at least) a larger number of TIKAL measurements.

1~we 0
Ojz01
- I-
IV0
Co
'U
1009* 0sz OSL 0521I toEX N W -U3 iwiz

48
VI. CONCIXCSIONS
Under the conditions and limitations assumed (e.g., zero accelerom-
eter biases), the incremental vel,:ity (DVKAL) measurement algorithr.
is superior to the time interval (TIXAL) sampling scheme in both accuracy
of estimation and speed of response. Although the results presented have
been obtained using a single physical process, the positive nature of
these results indicates the need for a more extensive study to further
establish the performance level and limitations associated with the
incremental velocity technique.
The errors incurred by the time interval Ilgarithm are derived
primarily from its improper modeling of the physical situarion.

C 49
"VII. LITERATURE CITED
[11 G.R. Pitman Jr., Ed., Inertial Guidance. New York: Wiley,
1962.
r,21 R. G. Brown, "Kalman filter notes,'* Dept. Elec. Egr., IowaState University, June 1968.
L3 j R. G. Brcon and G. L. Hartman, "Kalman filter with delayedstates as observ.a1les,11 Proc. National Electronics Cnf.,July 1968.
[4] T. B. Cline, "Suboptiimization of a Kalman filter with delayeastates as observables," M.S. Thesis, Library, Iowa StateUniversity, 1970.
[5] R. C. Brown and J. W. Nilsson, Introduction to Linear SytemsAnalysis. New York: Wiley, 1962.
L6] L. D. Brock and G. T. Schmidt, "Statistical estimation ininertial navigation systems," Journal of Spacecraft andRockets, vol. 5, no. 2, February 1968, pp. 150-153.
"L7 H. W. Sorenson, "Kalman filtering techniques," in Advancesin Control Systems, vol. 3, C. T. Leondes, Ed. New York:Academic, 1966, pp. 219-292.
i4

50
VIII. ACKNOWLEDGMENTS
The author is indebted to Dr. R. G. Brown for suggesting the topic
for this study and for the guidance given during its investigation.
This work was supported by the Engineering Research Institute through
funds provided by the Office of Naval Research, contract number N00014-
68A-0162.

51
IX. APPENDIX A: SIIIJATION PROGRAM
A. Main Program
= _ _

52
0-
Z ~ U I--- I
Wu Wj LIE z z
9- U- M
3:I -c- <
+ > 10.-
U. z I.- D 4c
X 0M I- W W1
0.0- -I- w u.J
* C; o0 i- U. >- 1 Ww w -~4n I. Z0-- L I
W - - W0 X 1 u i Li""<o ZifI- 4 . w 0 0)-*OWZ 0 II-t
I 4x~Z 0 w .4 1-4 . 4 " 4 4cuu0 Z .- 4Z 44 U a u- a-
-a 0o _. S.- 4: 40 a O0. a6-a- -a um--j c
0. 0 ujl-Z . Nuuz q U
ZLu ) a )0 c --4 Li ~ > U.o 0
'-0o. OuZOV)~n qýwZ l- P- in 0,4Z W-XO--WZ wco..ua -P..Z _J C:w
ifli 00-w ZZWi. c W) w AZ OZ"C..: -- u->I- .- O- at > *-
Li ZVW & -U -' W~
0 Li "m fi C) D0 -I4U'- ý- * Z-<Z - oC o0pC )0-00W - W AZ W- -*L ýlý0 UI Z 4a U.. )-D -. S- p-
o0wi u.~ - z0 CD >- W -a- a0 .- 0 44 ' I.-= oLJ >-I
Z~JI Z)4nwnx0 a Z- Z)V 0 .-

53
NO
x z*
u.. WI
Z 0ZU. WLL
uiUZ.-W
x4 Z. z .- z:
Z- oEU Z
z Lu
In 0w 0 w 2%7 of ft-.- _j 8
c-U UJ 4 b..- uwO
Z -0 0 ccU ZD 0*V uc4 - 3C 0w 0 x 0
zx I. *. -4-zI.- -CLu 0N ct0 D 0 v -
oi W - w 5* *- 0 n 't V 4 *LU. or- LLOI- * 0+ .* c
8 ~ * -c NW Lu InC'o
*Z 0* cc ~ U- a)..J 0 0
< 0- n 6 cia- 0 -4 <mx" W4. l- @-ai _jU i * c- W*IA.A J 9* 7-C. %n .On9 -l
In - L) m. LiUn us 0- <- -W -X 4. - Uin~~ .0 0- -K--- 1-ZwW)V4-0UJ- &f&.-U WK OJ u.4b0svW a*Uls
4UV c) .C.N -4 X.0 J . X4)ft )( 3L- - - 4Aa .- V)Z- t, 0 0- *b**.)CU *44-w - e
Z 4A -u. LA -4 -N0 0- 01 C X
"o - 0 I 4N9 U .'0--Z - a a -a- -L -C S.-w Box got-$.- OulZ Z.a i-'. O -ic'
09 Z Luin cr a-e4 K v)l' a 9i- X -CC -- u--
- a WISL 0.4. -1 0.- <U iK. a%. a
00 0. (nwot zw Lu U l-j I 0K . ww cr .
00 C C W O-.j'0- 3 S

54
a, -O 4 4, -C:-.t0 0-0 V4 0) i
01 &1 00. e-4 -- 4* + + * %t
< LL
0
W X C ( .* w I i- I.- 2
0( ~ X JA~C M Ln- %"uý , zUt*- lo Pt 0. P- 004, a c4iinI - 0ngat~cJ-ýr z,. > -9 Lu x 0 .
4*J*.4.0Lu Z Z wLL+ 0 0--j10
LU z z 9.9
- 0X
wX Q~s x * w wZ I--r 0 0 mu- 0.le Zl Z --xOD~*u*j W p %t' ent C0 0i 0i P. 4 X
mit. w0* 0* -, .41 00 49 U1) 4j xU Xi4. #
4 to J4.-S , %m - 0. 4- 4n x D~ZOD 04 '..J OD zY b- CD0 -o-U . CU -
* * .eu.GN4c )CUNOOXC4- - JO .- + Z4'- 1 CO0OV)% '.j4D* )C.j Z Z 49o-o 0 1.-&L1L44.9N 3s 1 . *- * W * -4 X*4K 9.- l 9X.1- m 0 3O LV
ul UN x - < a a 8 5 V) I-e- 0 B - -L~. .. * ~4 .* - - - -j V -oxv ~ i.,.tmu-z o
Cl CL
0 e li Li %-) oo- * C.) rvCV uJ1-

55
z
u-j
LuLA.
LuJI- CL U'
If . Ci W
+ -j M4 C1 V
U. N : W (V
* .j M LL -j
U'~§A IV) Ca.
-~~ C., * .'I)
4 1- 2: 4D-~ ~ ~ U Luxa- - u UU' C.) x z I.--2
W InJ LuJ 0.-4 ai uiA -i Z 7y
9.- V: fl- Cl C, LI u. 49l uj el-j V ) W ta Or w "
Ua 0 - nU.
-4 0. %A L, ISI .
C i 2: Z4 C)3LA, .-j +. Lu > I.- o") V. LO
x 1 42 f- uj em a) Lu9j x 0n - a) vi 49 x i
a,- 3. C) w0 Di 2: I0 L;LLI.- x 1 CL .J 3E7 L 3: Lu a-q ) ..-CL 4 CIn f ' > > > -
CL %T* C.- 40 -A w -w- I-- -j ib-U0&-XCI9-V0W4 w3 j :4 a. - X9- '0 V.0
il U..,. 4 - 0 0 i-i-- +- CGO ) &L L. 1 I-- 0 an C.-i- alu - 0 > , C-- Nj w w-C >
> 4,ý. _ja0 .. 't -d '0 4ý )(3i C
LL 4-) -j : w ca. 0>> .. W 0>> w
>~.. g> -) C)- C),CUC~C
56
N a
LU Lu b.
0W WO .- -. - -<w tAnZ -Ci-- X elLA- .4 )X uW
-j CC,~ 0 w uV,
cuan = - a x cyin=
ai -7 .4 -7 -C
*X C ~ wýXv Ci c.ufn C" (1)f X en W .
2z XI .11 -. 0; fXfl
*w w 0 ev x 01Oi *: C4 N.
w . ' U- '- or wOr enN CC. X - -.
tv i.- x We N Cm .0x
- a 's 0 -X - -40. -. .1- I-. - DX -I*-' IU..- 4
I X X u4: x g-X4i =en V4 C) w tCu-4 cn C:
w I 2: 0 aI U% w ~ OD
Cca 44 eX w 3 aXa CC 4 4- N~jx
WiXu 0 ILI ui N e) I,- oujLUJ a .*CCMw wL U.X .x m U).ZX ~ X-QDUJ
-ax x P- < - I- I.- w . U...W *)(-4 0I . 1--I-- w x' 0 Z x 3ri Nb> u'~ -a~~.J UU xJ xW % O ~ a ~ .. ~.. D.LU -Xt u LU.- 17 0 6. *a -- X -Ui 4LU..O u .
w . .j4 LU .i (A I-- W% -.- -o 1ý- ) 4- cwz 4.. Oe X: 00I. - X-Z 0.0. W fn COI M3 - x.4 D w Z n- Z- Z tr
C)- CV 0 .- a' 149 ui ' ~ 0 1- ccw NoQ 0.)*aw A. CC 44 ea 41 - cc% -a' CC V- . -U. IlOa. U., - . I-- X .J. > -- X -inV4 pc- U.. 0 .
on fn a- IA .- I-4O< a -'L w N ee- UN fn.- '-OW3. ,a - X.~ Zx> + -x , r-- - X I-aX D(4IIA C. -I- OD M ~ a -Ji IZ W I.-w in. O ff. - A--= - I.- z
0- OXXL0owI-74 *CS-O..aI cnal---j=4. -7, *XI w <L4,..---Iac U. -m WU. *4. Ir a 3c -9 z ZCC CC e- fn~ rIfUL CC w Z
i.- w 39L I-- 3eLi0-41.X u- -L3t wv- '00n4 n .0 up (Ar 4 0~ v- v n-Z&
IA Dole x IA crin.- C

57I
44
100
i.-1
e.-aZ
* * J uwZ
z'n-D
='

58
B. DVKAL Subroutine

59
0.-
S*- sfoASO, Z
0 0
'I-
Sn cn a-
0 w U-.
x 0- W).
IW I.-r
- .-IIf Lu0I- o--in- z >
.0 0 C
.0) .-- x 0 U.0C) Z -- :)
.J Q in - 4d2
qIx -O J1l WOO -. . uj )e % t
Oj> .-4 an. In o .- c
a U) U 0 L1
X- 0 N ii%
Lu>Au *In Xvm it ica
wli U'1-O- ~ -JW 0 ji nV
40>0<X W"ý -ZZ 019 mO CC-- - ' - -- ~ -*uSZuix L.'O4I
CA -0 w -~ cc - - -
Iý .-4 .tu1 orw r I- > I--

CI
I-ap.- ~3E
- ~ frh -tLJ U.Cie
LI,)
o4 X
%n CL~ 4a+
ý* V4..- -ILN I- x - - " ' -. t 04
Z I ( 1 91 * * i n w
*~~ Z,- Z~ ; -
CL a
ND *4 4z * * X
~~.*Z 0 IN.
W
2 a4 r'-0-~~~ ~q a
~ -W . :r Q ~ 40.4~U
4 q-M~..4 't
.**O..*~~~~C9 * IZ - C a -, '-
Z ~~- C> N C. - . a v E %N~1 WW-
N 0.Z 'OZ
. J I" 4x + . . '.
1..X ) U CL OF is

61
a x
II
0 x
0 #. , - .
01
a-301 30. u
0- ZNwx w
U- Vý 0 i
UN C:) 0.&-
Ow 4.4 0..P4
Z ~ ~~~~ I I x2m Xaa
0 ~~' CLD 1 x-
V4 G 2u0.P- 0o ui c-
0- 0 * -a co-t .~ 4( a -WIfY ~.

62
C. TIKAL Subroutine
I
II

63 _ _ _ _ _
xI
UN'
4n in'
4 . 44.4
< -.
b: X: 4% 0JI-.
Z - PA^ u 4 L .0 0
T -.- &n 0Z W WO
-J12 I-Zu W Z n
1- 441 4n P4 0ti %4, KO. z- *CD t 4 - .C
N e1 C) X % 0 d 0P-wm 4- X <
X0V c. UN ZZt> nin4w
D-W 40X -0a- c- Un 1O
.- a: cc I... a I-m a a=Uý 4,c qI--4 M( q.. V%- * n nM --
M1 Z U LU - >0 Z w -Ic Q ~ 0 .4,U
4n L I U .-Lrav'd) 4 wwZ .)%
~J'4Z .Z W U t- eelCL 41Q .~6
u.Q..au s. UZ *0 4 t 4

64
.>
4.
x -41
a- .! &i a-,
re Z to
0L 1 1 cm
.41 Wt 0
tv Ca I
-z - W* -a.
*r - -Va &''
m I.- cucr X CL- wL
< w- Q-iLL a~Z P- - X- Q. CL a: a.a
m mW U)-Q 0..-+x v* +'.- 4* t-0 0 --- + -
z 1 I0- - * U*a W-. s-iaC.vCL. Uj.V4 X3- 0a. $-.. *-a a a W31- W u .- u -. x 't W
- 0. 0. 0. CL .4 a. w -4&Oi 1 ~-- O'Ww 0 0- 4W
.4~e .4. 94-4 4%6-LI 01 OD LI Lu zI -r

1 65
In CLiI;J
eZ4- D zJ
z a. z0 -ooxdbh-noz
M -- 0-

66
D. HRPI Subroutine

67
X- *
* 4z
Wo -f i
.4 Co*- IW 0
1-4- 39* *n
-~C j* -t* -%._ Y
U.O o.a UN0 %v A60v4*4 ZCit ~-z ie n4 - n w
Z4 -- vff40 - 4tt- W - Iw -
I 0 *U0 -. Y L _ n3 e - . a4
a e- N8 t
CO -j ft a of- 001- at --
ft . Il'A v &y30 A .u* 4 W

68
I.-
4. IL 4zN~w*4.cm
* w 0-
In) + + *z
X * X*;;* *
CY CY Wa~
39- u
* * I* I U*4 0
- 4 U* *II- Iq u N0zCMi 0 - 0* tv* *U 9-4.
* t m W -- C .% mC * W m *Uj -4 * .. 00
cn0 .* .*- N%. "...N * * * D0O%** 't. e. or N39 Z f0O 0* %.) v" CD 90 9, .4 ** 1 0 XdD X- 39 P e i P-a* -L'I ID X I I I~ &C I CDD-5 I8II - 3CI # ICm'.:Ww qA
a5 a a a- a a a a - a a a a 0 a a a &.- ". no I f +*
N X 0.-iCD 10V
C~j fr.+ #-I#.)

69
m~ 0-0 4 4 4
'O .04 * U, .0
o0 1 .- L)*IU u
* - 0.. Z Z Z
Z * I) I4 a aU *V. a - .- a I
1i- * 3u *L W*1W Awl xi wui
WO.-O* en4**0i0 e lX ~ J W% cu I
t- V4 P- m ' t U' 0
CV 9-~4* 00.
*c C I - I-lI
&,I X M Ux & &OCC UJ-X X*w*WLL&j
x I.- UN C -t u0%4. 4
w waWaago
:) 0-- - -t) - (flM 8 wm -0*Z U UNE I I .In0+( z - ZA 3- - .- V4 eaa en a' *t w w Z
MIEa, U I IIJ f .aXU. aS.'. 9.. Z c UU ZZ*. t wWI
04 ue 0 II I. Q C.d V" C.C.C CC,
L; u 4

70
X. APPENDIX B: GRAPHICAL REtUrLTS
A. Azimuth Error

71
Zk.0
cr0
0n
- iI 0
-- 1 0
to~~ ~ ~ ~ IX NWIUU3 o i
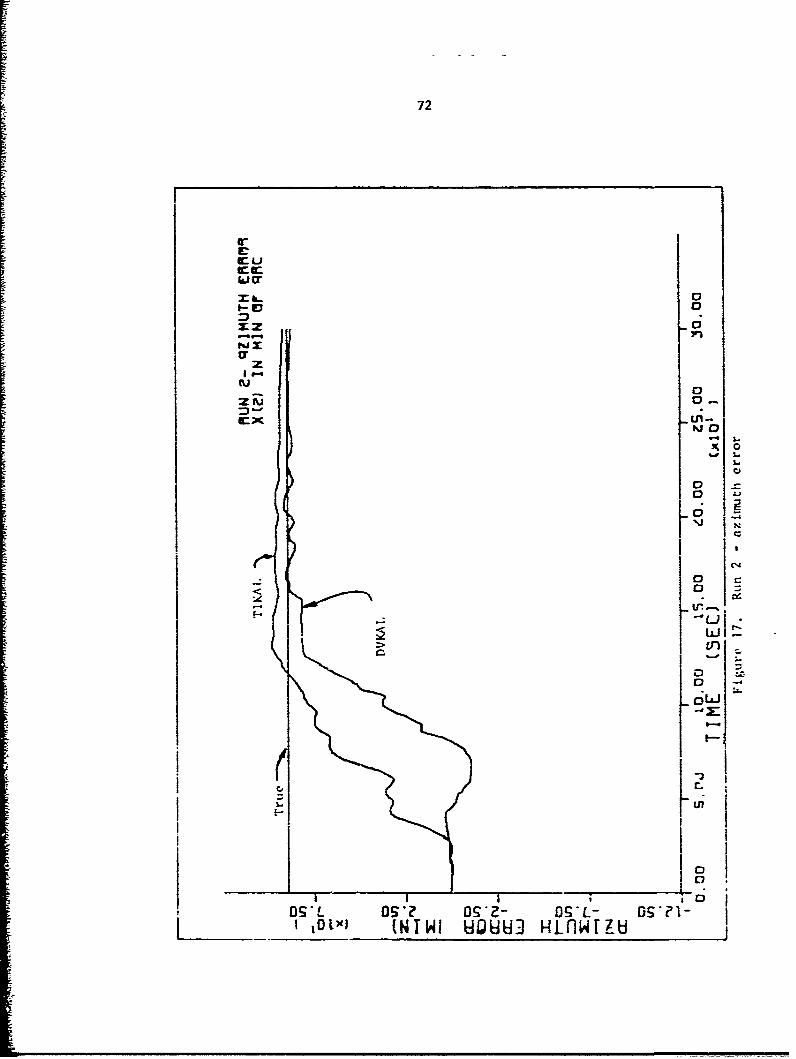
72
X6-v 0
x~z 0
I.-q
(uz 0
0oj
0l
u,
_JLL,
j I lI x INIWI UJQUUJ HLOwTi3~ ~~

73
CC
z a0Zk.In
U~q gq
OwlO
t.
OS' Los~z os~e DS*- KsI lot) (NI W)UQWU3Hinw5.it
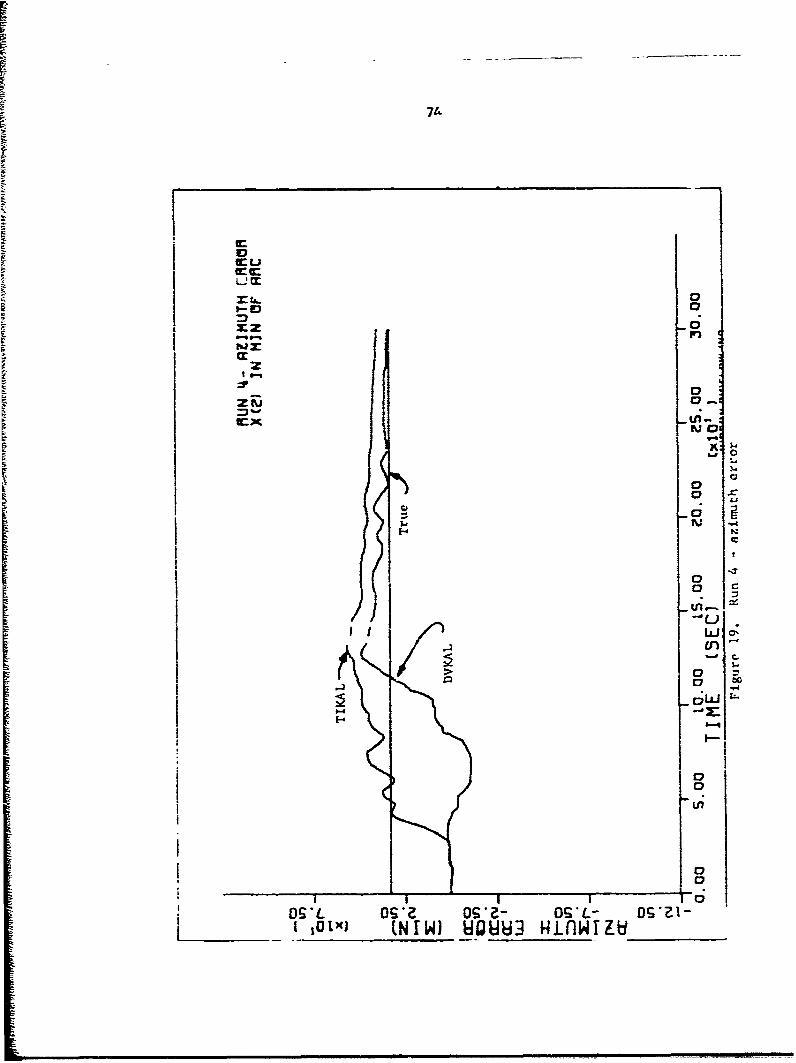
7A
ICUW- m
Li M51z
x z 0
N. 0
I C31
0 a:
I- ~iv -n
'-4 0L&' Z- 0 * - D~ l
I 0OX(NTW) OUU3 inwUa

75
IccLim
CC00
rz_0Fn
I,.
zn 3w 0-
Ac0 0 3
0 £0
C~u
0
S, L991Z 09,- 09L- 0*Z oI to x) i~wi U UO H'W[Lb

76
ccum
CLz"&"lux:
0z~u 0.C)( In
os i. OS' os~z nclotx)~~~~m (NNPQU %h [t

77
0
zz 0
0
r,., L0i
to -(I (N~ 6U3H1w

78
cu
xzL
I" I .lk 0
104
- s Isz &L- 0 '
Dix) (Nfl YOU3 ~nw zo

79
IFo
I&JZJ
hi.
'Jo
0'
f0OG*LGG'2 05'- OSL- 0 'a 0
I JOIX MIN)69HU3 inwiz

80
LimZ
t z
0
in-
C),~
lol1-
0
OS'L~ We.~z )SL '-l
I loi) (NTWJ QWU3 Hinwr zb

81
B. Level Tilt
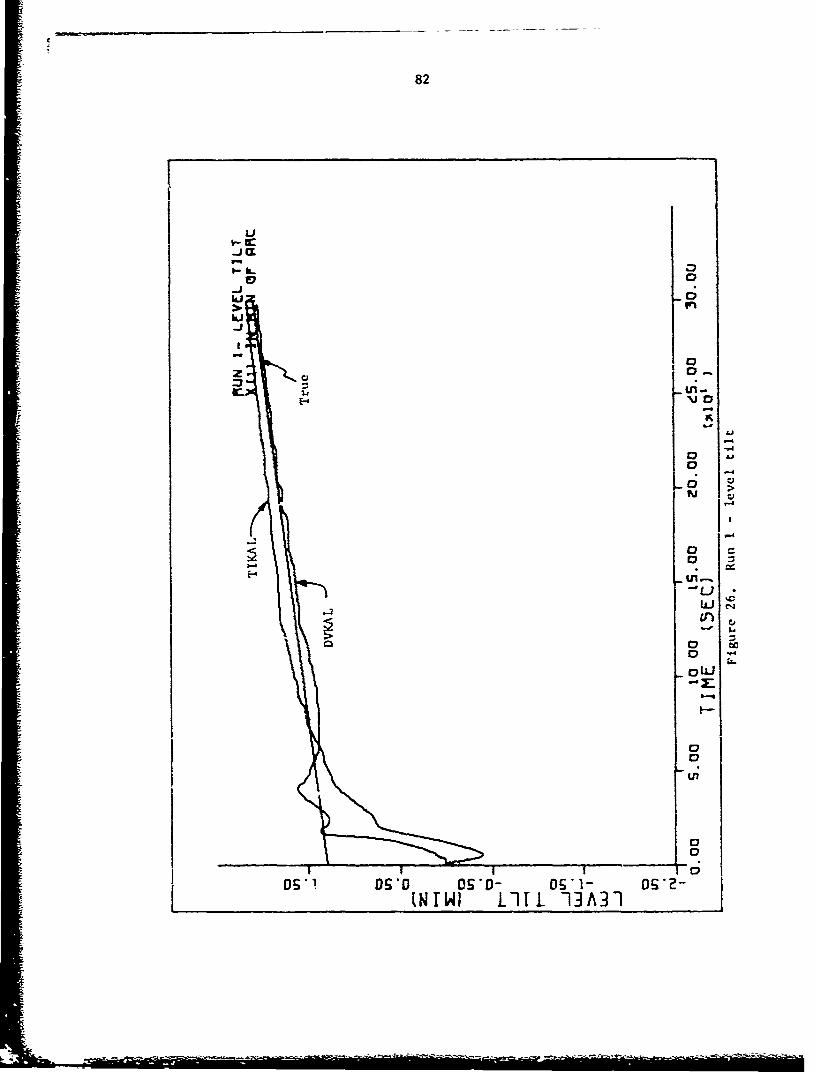
82
I- C
k-L
00
-i
z I~
E-4I
00-. 4
0~~~ s 1 t'D SltNTWI ~ ~ LI -33

83
0
-4J
z.-4
-4
>
oL2
0
6be
E- 4
(NIW)-4I 3 3

84
IAJwitk 0
kZ
00
0
r2t-4
C-n
00
OS'l s - Dosn-INTW)L~lLý3A3

85
iLI
9-, 0
Zipg, 0"P
LJZu 0
LiJ
-tI
0
if;u...
j Ca
-U7
0*09 * 09*- Dsl- O' ?I
(N r ) Llr 13A0

86
s-C
-0
V 0
bIZ
-jA20
Inn
CC.
DUI
-T--
09 1091 OG*- 0 *1- 9* oiwrw Lir13Ao

87
0
Z:: 0-
VI 0
2C
5.-rSnf sl- sos?(NIW Iw 33

88
-j c
uzI-j
IV0
Zr.i
'-,4
I IALD.
0&11 s~o -qlo- os*1i NI wi l L133

89
L4i
000 :
Li 4-JL
too
6LLJ
OS'D oso- os.z
IN. -I I L 3 3

90
Iu0
vz 0
-j
010
in
K41
-4
o40
-0 >
0
00
14 dwl
U?
o~to
(N IW) 1l1i 13A31

r 91
_rc
fr-L 0
bV z
00
COX tn-w 0
4-4
4.1
0-
C2in
C2,c
0 -4
0
0
O-O-(Nrw £111O I 1A31