february 21, 2000robotics 1 copyright martin p. aalund, ph.d. computational considerations
TRANSCRIPT

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Computational Considerations
DOF4 6 7 10
Algorythm Adds Mults Adds Mults Adds Mults Adds MultsK 36.0 36.0 54.0 54.0 63.0 63.0 90.0 90.0IK 411.2 1372.8 1915.2 4230.0PC PID 21.0 16.0 31.0 24.0 36.0 28.0 51.0 40.0PC PIDG 169.0 186.0 263.0 286.0 310.0 336.0 451.0 486.0PC STR 727.0 838.0 1141.0 1294.0 1348.0 1522.0 1969.0 2206.0State Space 156.0 168.0 234.0 252.0 273.0 294.0 390.0 420.0Torque 516.0 482.0 824.0 760.0 978.0 899.0 1440.0 1316.0D 1364.0 4448.1 7161.1 22660.3DC 16912.0 32610.0 43170.3 90070.0

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Kinematics
• Kinematics can play a large role in both the computational requirements for the robot, and in its range of motion.
• Most industrial robots have simple kinematics to reduce computational burden
• Often have spherical wrists.
• Almost always have 3 intersecting axes.– Pieper’s Solution guarantees a closed form inverse
• Sine and Cosine terms handled in look-up table.– We can store both the sine and cosine in one table.
– Need only one forth of the full table.
– A 16 bit look-up table would require only 32 Kbytes of memory.
February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
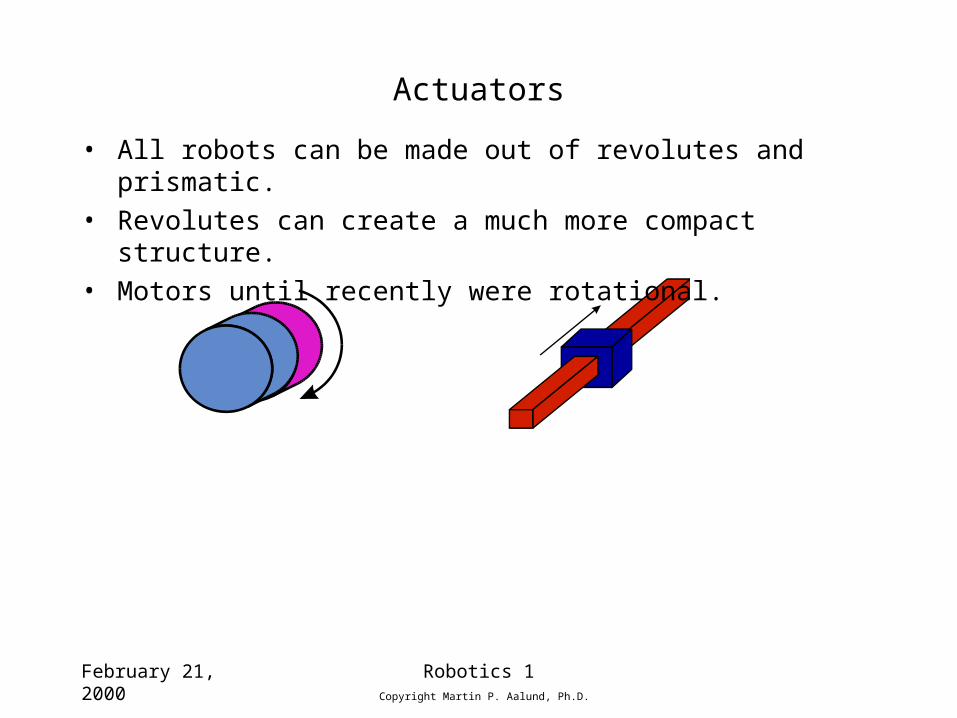
Actuators
• All robots can be made out of revolutes and prismatic.
• Revolutes can create a much more compact structure.
• Motors until recently were rotational.

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Workspace
• Very dependent on the design of the manipulator.
• Small wrist Sphere or circle is important– Use Gimbals
– Combine actuators
– Reduce length of actuators.
• Reach of robot with a spherical wrist where all angles are possible is:– Distance to wrist minus the radius of wrist Sphere

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Workspace Example

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Wrist radius Vs workspace.
Actual Workspace

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Arcmate Robot

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Shilling Arm
February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
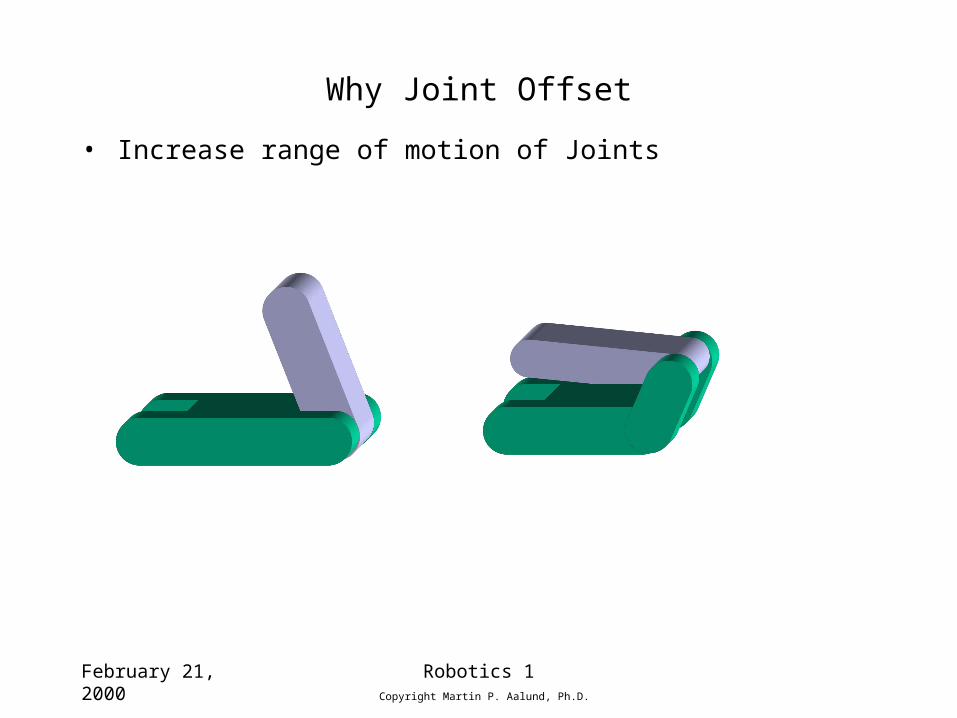
Why Joint Offset
5
• Increase range of motion of Joints

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
3D Parallel Mechanism

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
What's Next
• We now can calculate the position of the robot based on the joint angles and the joint angles based on the end-effector position.
• This is enough for very simple motion, but if we want to control the speed we need more.

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Velocity
• Velocity is the derivative of position with respect to time.– Linear V
– Angular • Velocity vector is associated with a point in space.
• Velocities are relative to reference frames.– Train, Car, Fixed
• Speed is the magnitude of the velocity without direction information.
• Velocity contains information on direction and magnitude.

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Example
Y
X
YX
QA B

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Reference Frame Velocity
• We need to know what frame the position is in, and what frame we are taking the derivative relative.
• May be zero relative to some frames.– Link Example
• Frame of reference is designated by a leading superscript.– Example we have a position vector in reference frame
– We want the resultant derivative expressed in Frame A
Qdt
dV B
A
QBA )(
Reference Frame of Velocity Position Vector Being
Differentiated
Reference Frame of Position Vector
Reference Frame of Derivative
QB

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Reference Frames Velocity
• If A and B are the same we drop the outer superscript
• We can always remove the outer superscript by including the rotation matrix.
• We will often consider the velocity of the origin of a frame {C} relative to an understood universal reference {U}
• Or expressed in Frame {A} but still differentiated in {U}
Qdt
dV B
B
QB
QBA
BQBA VRV )(
CORGU
Q Vv
CORGUA
UQA VRv

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Angular Velocity
• Describes the motion of a frame or a body in space. • Definition
• The direction of AB represents the instantaneous axes of rotation of frame {B} relative to frame {A}.
• The magnitude represents the angular speed of rotation.
CU
C
Angular Velocity of Frame C relative to Global Coordinate Frame
Angular Velocity of Frame
Frame being measured
Frame measured Relative

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Linear and Rotational Frames in Rigid Bodies

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Motion of Rigid Bodies
• First attach a reference frame to each body
• Now we can study the motion of each frame relative to the next.
• The is the same methodology we used to study the forward position of the manipulator.
• Lets look at frame {A} and {B}
{A}
{B}
BQ

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Rigid Bodies Cont.
• Lets look at a vector Q fixed in frame {B} BQ
• We want to describe the motion of this vector relative to frame A
• For now lets assume {A} is fixed.
• {B} is located relative to{A} by a position vector APBORG and a rotation matrices
{A}
{B}
BQ
APBORG
RAB

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Rigid Bodies Linear Motion
• Three things can be in motion or changing with respect to time– The vector APBORG can be changing
– The vector BQ can be changing
– The orientation of {B} with respect to {A} may be changing.
• First lets look at linear motion, so assume is not changing.
• So we need only represent both velocity components in terms of {A}
• Remember the velocity of Q is just a vector so we can use a standard rotation matrices to transform its value from one frame to another.
• If we know Q(t) and APBORG(t) we can differentiate and plug into the above equation.
RAB
QBA
BBORGA
QA VRVV

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Rigid Bodies Rotational Motion
• Now lets assume that Q is constant and fixed in B. BVQ=0
• Even though Q has no velocity relative to B it is clear it can still have motion relative to A
• The the motion is due to two components– The vector APBORG changing
– The orientation of {B} with respect to {A} changing in time AB.
– Lets look first at the change due to rotation
{A}{B}
BQAB

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Rigid Bodies Rotational Motion Cont.
• Lets look at a small Q a small time later t
{A}{B}
BQ(t)AB
{B’}
BQ(t+t)
Q

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Rigid Bodies Rotational Motion Cont.
• The change in Q for a very small motion is just the radius times the change in the angle.• Radius is Q sin()• Remember Q is not changing in time• So Q is just Q sin()t• This is just the cross product of
Q and
If Q Changes with Timethen
or in terms of {B} and R
Q(t)AB
Q(t+t)
Q
QV AB
AQ
A
)( QBAA
BA
QA VQV
QBA
BBA
BBA
QA VRQRV

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Simultaneous Linear and Rotational Motion
• Linear
• Rotational
• BothQ
BAB
BABB
AQ
A VRQRV
QBA
BBORGA
QA VRVV
QBA
BBA
BBA
BORGA
QA VRQRVV

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Propagation Link to Link Rotational
• So now that we can calculate the velocity of one body or reference frame relative to the other how do we apply this to a robot?
• A robot is a chain of bodies represented by links that can rotate or translate relative to each other.
• We already know how to assign a reference frame to each link.
• The velocity of link i+1 is the velocity of link i, plus the velocity component added at joint i+1.
• Angular velocities can be added if they are represented in the same frame.
• Remember we have defined all joint motion to be around or along Z.
11
1i11ˆθωω
iii
iii
ii ZR
1i
1
11
1i
θ
0
0
θ
i
ii Z

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Propagation Link to Link Rotational
• For Linear velocity we get
• This is the same as we previously derived with iPi+1 a constant.• If we want the velocity and angular velocity in terms of i+1 we simply
pre-multiply by the rotation matrix.
• Remember that the derivatives are still taken relative to a universal frame. So vi is the velocity of the origin of link frame{i} and i is the angular velocity of link frame {i}. They can be expressed in any frame even frame {i}.
111 ω
ii
ii
ii
ii Pvv
111
11 ω
ii
ii
iii
iii PvRv
11
1i1
11
1i11
11 ˆθωˆθωω
ii
iiii
iiii
iiii
i ZRZRR

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Propagation for Translational Joints
• Similarly for the case of a Translational joint we get
• No additional angular velocity component since it’s a transnational joint. Just a change of reference frame.
• But must add contribution due to linear motion of joint along Z axes
iiii
i R ωω 11
1
11
1111
11 ˆω
ii
iii
ii
iii
iii ZdPvRv
February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
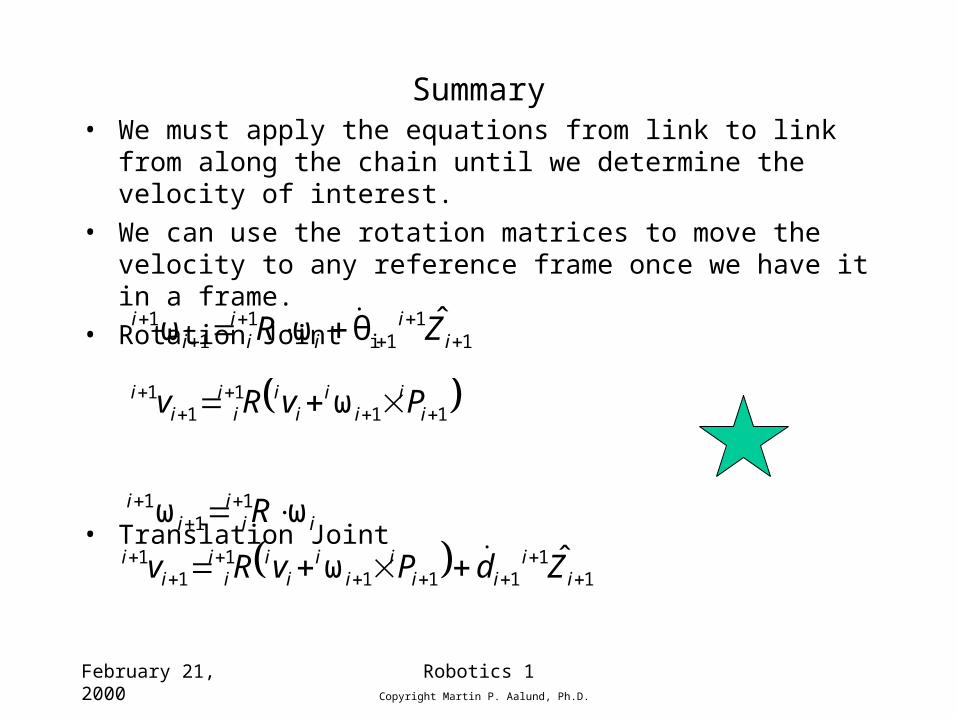
Summary• We must apply the equations from link to link from along the chain
until we determine the velocity of interest.
• We can use the rotation matrices to move the velocity to any reference frame once we have it in a frame.
• Rotation Joint
• Translation Joint
iiii
i R ωω 11
1
11
1111
11 ˆω
ii
iii
ii
iii
iii ZdPvRv
111
11 ω
ii
ii
iii
iii PvRv
11
1i1
11 ˆθωω
ii
iiii
i ZR

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Jacobian
• What is a Jacobian
• Lets say we have a functions x=F(1,2) and y= G(1,2)
• We want to find the velocity vx and vy
• We use the chain rule to take the derivative
• Or in matrix format
t
G
t
G
t
G
t
yy
t
F
t
F
tt
xx
2
2
1
1
21
2
2
1
1
21
θ
θ
θ
θ
)θ,θ(
θ
θ
θ
θ
)θ,θF(
2
1
2
1
21
21
θ
θ
θ
θ
θθ
θθ
JGG
FF
y
x

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Jacobian Cont.
• The Jacobian is multi-dimensional form of the derivative
• At any instant the Jacobian is linear transformation.
• The Jacobian will vary as a function of time.
• Most common Jacobian deals with joint velocities.– It relates the Cartesian coordinates of the tip of the robot arm to the joint
velocities or the derivatives of joint variables.
• The number of rows corresponds to the number of joints
• The number of columns corresponds to the number of Cartesian coordinates.
• The most general form is a 6x6 matrix. Does not have to be square.
• The Jacobian can be calculated for any orthogonal set of variables.– X,Y
– R,

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Jacobian Cont
• For low degree of freedom robots the Jacobian can be found by directly differentiating the equations of motion
• This works for linear velocities but does not work for angular velocities.
• Changing frame of reference of a Jacobian.
• The general 6x6 Jacobian maps both the angular velocity vector and the linear velocity. If we view these two 3x1 vectors as one 6x1 vector we can see how we should change the Jacobian’s reference frame.
zv
yv
xv
v
zAy
Ax
A
A
ˆ
ˆ
ˆ
z
y
x
zA
yA
xA
A
ˆω
ˆω
ˆω
ω

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Jacobian Cont
• We can use the following equation to convert from frame {B} to {A}
• Since the Jacobian performs a similar mapping.
• If the Jacobian is non singular we can invert it to find the joint rates in terms of the Cartesian coordinates.
• What does a singular Jacobian mean.– In general it means that no instantaneous motion along one of the
Cartesian coordinates is possible.
ω0
0
ω B
B
AB
AB
A
A v
R
Rv
J
R
RJ B
AB
ABA
0
0

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Jacobian Cont.
• We can use the Jacobian to predict where these singularities occur
• If we don’t check for singularities, we can end up commanding our joints to move at high velocities.
• At the actual singularity we would require infinite motion from the joint.
• Two common singularities occur– One is when two joints line up.
– The second occurs at the edge of the workspace.
• Additional singularities may exist that are not predicted by the Jacobian.
• Structures can be designed to be singularity free from a Jacobian point of view.

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Jacobian Example page 1• Given the simple manipulator below find the Jacobian referenced to
frame 4. Frame 4 is at the tip of the arm with the same orientation as frame 3
• The manipulator can be described by the transformation matrices (see Example 3.3).
1000
0 222323
212111231231
212111231231
03 SLCS
CSLSLCSSSC
CCLCLSSCCC
T
1000
0100
0010
001 3
34
L
T
TTT 34
03
04

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Jacobian Example page 2
• We are mapping from Cartesian to joint space
• All Joints are revolutes so we can use
1
1
1
θ
θ
θ
J
Z
Y
X
11
11 ω
ii
ii
iii
iii PvRv
11
1i1
11 ˆθωω
ii
iii
iii ZR
IR
cs
sc
R
cs
sc
R
43
33
3332
22
2221
100
0
0
010
0
0
100
01
011
110 cs
sc
R

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Jacobian Example page 3
• Propagating to get the velocity
1
11 0
0
ω
0
0
0
v11
2
12
12
22 ω
C
S
11
22 0
0
v
L
32
123
123
33ω
C
S
12211
223
223
33 v
CLL
LC
LS
33
44 ωω
123312211
323223
223
44 v
CLCLL
LLC
LS

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Jacobian Example Page 4
• Answer
• We could also have differentiated the position vector and then changed the reference frame.
00
0
00
233221
3322
224
CLCLL
LLLC
LS
J
1000
0 233222323
2313212111231231
2313212111231231
04 SLSLCS
SCLCSLSLCSSSC
CCLCCLCLSSCCC
T

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Static Forces in Manipulators
• Want to know what are the joint torques required to push or hold something.– Assume the robot is stationary, lock the joints so it becomes a structure.
– Do a force/moment balance in terms of link frames.
– Compute static torques about the joint.
• fi=force exerted on link i by link i-1
• ni=torque exerted on link i by link i-1
• For a force at the end of the robot we can propagate backwards
• To calculate the toques of forces required of the joint only need Z component– For a Prismatic
– For a Revolute
11
1
iii
iii fRf i
ii
ii
iiii
i fPnRn
111
1
ii
ii
i Zf ˆT
ii
ii
i Zn ˆT

February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Jacobean in Force Domain
• Virtual Work– Based on conservation of energy.
– Same amount of energy is required no mater what frame.
– Work is the dot product of the force or torque vector and the motion vector.
• – F is the Cartesian force-moment vector
– x is an Cartesian displacement vector
– is the joint toque-force vector
– is the joint position vector
• The Jacobian is defined as:
• So we can get the following
xF
Jx
TT JF FJ T
February 21, 2000 Robotics 1 Copyright Martin P. Aalund, Ph.D.
Homework 1
• 5.2 Show that you can get the same answer as the example in class by differentiating rather than propagation.
• 5.4
• 5.7
• 5.8
• 5.13
• 5.18
• 5.20
• List 3 reasons for calculating the Jacobian.