finite element methods - sccswiki · pdf filealgorithms for scientific computing finite...
TRANSCRIPT

Algorithms for Scientific Computing
Finite Element Methods
Michael BaderTechnical University of Munich
Summer 2016
Part I
Looking Back: Discrete Models forHeat Transfer and the Poisson
Equation
Modelling of Heat Transfer• objective: compute the temperature distribution of some object• under certain prerequisites:
• temperature T at object boundaries given• heat sources• material parameters k , . . .
• observation from physical experiments: q ≈ k · δT(heat flow proportional to temperature differences)
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 2

A Finite Volume Model
• object: a rectangular metal plate (again)• model as a collection of small connected rectangular cells
hx
hy
• examine the heat flow across the cell edgesMichael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 3
Heat Flow Across the Cell Boundaries
• Heat flow across a given edge is proportional to• temperature difference (T1 − T0) between the adjacent cells• length h of the edge
• e.g.: heat flow across the left edge:
q(left)ij = kx
(Tij − Ti−1,j
)hy
kx depends on material• heat flow across all edges determines change of heat energy:
qij = kx(Tij − Ti−1,j
)hy + kx
(Tij − Ti+1,j
)hy
+ ky(Tij − Ti,j−1
)hx + ky
(Tij − Ti,j+1
)hx
• equilibrium with source term Fij = fijhxhy (fij heat flow per area) requiresqij + Fij = 0:
fijhxhy = −kxhy(2Tij − Ti−1,j − Ti+1,j
)−ky hx
(2Tij − Ti,j−1 − Ti,j+1
)Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 4
Discrete and Continuous Model
• system of equations derived from the discrete model:
fij = −kx
hx
(2Tij − Ti−1,j − Ti+1,j
)−
ky
hy
(2Tij − Ti,j−1 − Ti,j+1
)• result: average temperature in each cell• corresponds to partial differential equation (PDE):
−k(∂2T (x , y)
∂x2 +∂2T (x , y)
∂y2
)= f (x , y)
• wanted: approximate T (x , y) as a function!→ solution possible using “coefficients and basis functions”?
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 5
Part II
Outlook: Finite Element Methods
For Model Problem:• 2D Poisson equation:
∂2T (x , y)
∂x2 +∂2T (x , y)
∂y2 = f (x , y)
• first, however, we consider the 1D case:
u′′(x) = f (x) for x ∈ (0,1)
with u(0) = u(1) = 0.
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 6

Finite Elements – Main Idea
• we consider the residual of the (1D) PDE:
u′′(x) = f (x) u′′(x)− f (x) = 0
• represent the functions u and f in our “favorite” form:(∑ujφj (x)
)′′−∑
fjφj (x) = 0
• however: we will usually not find uj that solve this equation exactly (assolution u can not be represented as
∑ujφj (x))
• remedy?→ find “best approximation”, given by orthogonality:⟨
w(x),(∑
ujφj (x))′′−∑
fjφj (x)
⟩= 0 “for all w(x)”
• remember that < g, f >=∫
g · f dx
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 7
Finite Elements – Main Ingredients
1. compute a function as numerical solution;search in a function space Wh:
uh =∑
j
ujϕj (x), spanϕ1, . . . , ϕJ = Wh
2. solve weak form of PDE to reduce regularity properties
u′′ = f −→ −∫
v ′u′ dx =
∫vf dx
3. choose basis functions with local support, e.g.:
ϕj (xi ) = δij
(such as the hat functions)
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 8
Choose Test and Ansatz Space
• search for solution functions uh of the form
uh =∑
j
ujϕj (x)
• the basis (“shape”, “ansatz”) functions ϕj (x) build a vector space (orfunction space) Wh
spanϕ1, . . . , ϕJ = Wh
• the “best” solution uh in this function space is wanted
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 9

Example: Nodal Basis
ϕi (x) :=
1h (x − xi−1) xi−1 < x < xi1h (xi+1 − x) xi < x < xi+1
0 otherwise
0,60,4 0,80,20
1
1
0,4
0,2
x
0
0,8
0,6
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 10
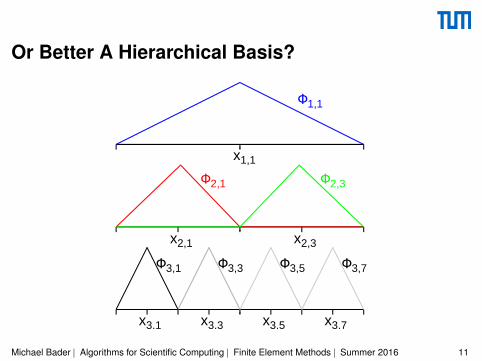
Or Better A Hierarchical Basis?
.x1,1
.
.
x2,1 x2,3
x3,1 x3,3 x3,5 x3,7
Φ1,1
Φ2,1 Φ2,3
Φ3,1 Φ3,3 Φ3,5 Φ3,7
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 11
Weak Forms and Weak Solutions
• consider a PDE Lu = f (e.g. Lu = ∆u)• transformation to the weak form:
〈v ,Lu〉 =
∫vLu dx =
∫vf dx = 〈f , v〉 ∀v ∈ V
V a certain class of functions• “real solution” u also solves the weak form
(but additional, approximate solutions accepted . . . )• motivation for weak form:
– we cannot test Lu(x) = f (x) for all x ∈ (0,1) on a computer(infinitely many x)
– frequent choice V = Wh, so check whether Lu and f have the “samebehaviour” w.r.t. scalar product
– approximate solution u might not solve PDE: Lu 6= fthus: additional functions need to be “acceptable” as solution→ “orthogonality” idea
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 12

Weak Form of the Poisson Equation – 1D
• Poisson equation with Dirichlet conditions:
−u′′(x) = f (x) in Ω = (0,1), u(0) = u(1) = 0
• weak form:−∫
Ω
v(x)u′′(x) dx =
∫Ω
v(x)f (x) dx ∀v
• integration by parts:
−∫
Ω
v(x)u′′(x) dx = −v(x) · u′(x)
∣∣∣∣10
+
∫Ω
v ′(x) · u′(x) dx
• choose functions v such that v(0) = v(1) = 0:∫Ω
v ′(x) · u′(x) dx =
∫Ω
v(x)f (x) dx ∀v
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 13
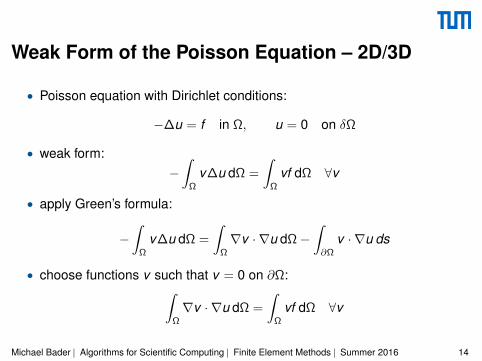
Weak Form of the Poisson Equation – 2D/3D
• Poisson equation with Dirichlet conditions:
−∆u = f in Ω, u = 0 on δΩ
• weak form:−∫
Ω
v∆u dΩ =
∫Ω
vf dΩ ∀v
• apply Green’s formula:
−∫
Ω
v∆u dΩ =
∫Ω
∇v · ∇u dΩ−∫∂Ω
v · ∇u ds
• choose functions v such that v = 0 on ∂Ω:∫Ω
∇v · ∇u dΩ =
∫Ω
vf dΩ ∀v
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 14

Weak Form of the Poisson Equation – Summary
• Poisson equation with Dirichlet conditions:
−∆u = f in Ω,u = 0 on δΩ
• transformed into weak form:∫Ω
∇v · ∇u dΩ =
∫Ω
vf dΩ ∀v
• weaker requirements for a solution u:twice differentiabale→ first derivative integrable
• remember use of nodal basis: availability of first vs. second derivative!
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 15
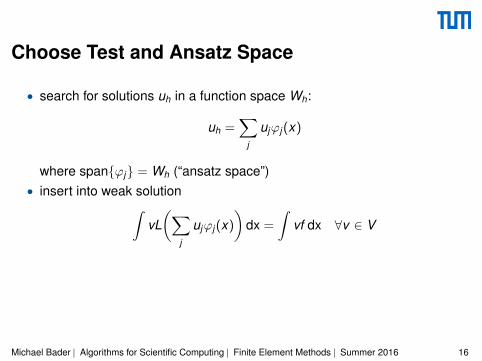
Choose Test and Ansatz Space
• search for solutions uh in a function space Wh:
uh =∑
j
ujϕj (x)
where spanϕj = Wh (“ansatz space”)• insert into weak solution∫
vL(∑
j
ujϕj (x)
)dx =
∫vf dx ∀v ∈ V
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 16
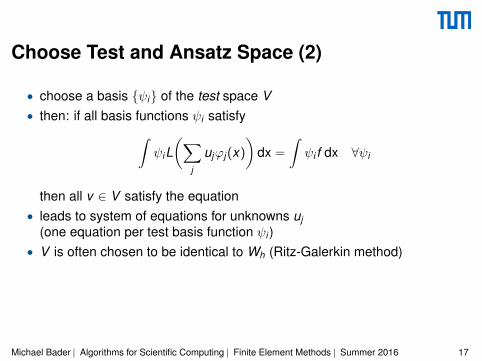
Choose Test and Ansatz Space (2)
• choose a basis ψi of the test space V• then: if all basis functions ψi satisfy∫
ψiL(∑
j
ujϕj (x)
)dx =
∫ψi f dx ∀ψi
then all v ∈ V satisfy the equation• leads to system of equations for unknowns uj
(one equation per test basis function ψi )• V is often chosen to be identical to Wh (Ritz-Galerkin method)
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 17
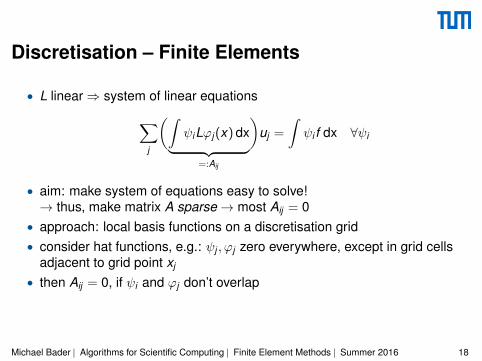
Discretisation – Finite Elements
• L linear⇒ system of linear equations∑j
(∫ψiLϕj (x) dx︸ ︷︷ ︸
=:Aij
)uj =
∫ψi f dx ∀ψi
• aim: make system of equations easy to solve!→ thus, make matrix A sparse→ most Aij = 0
• approach: local basis functions on a discretisation grid• consider hat functions, e.g.: ψj , ϕj zero everywhere, except in grid cells
adjacent to grid point xj
• then Aij = 0, if ψi and ϕj don’t overlap
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 18

Example Problem: Poisson 1D
• in 1D: u′′(x) = f (x) on Ω = (0,1),hom. Dirichlet boundary cond.: u(0) = u(1) = 0
• weak form: ∫ 1
0v ′(x) · u′(x) dx =
∫ 1
0v(x)f (x) dx ∀v
• computational grid:xi = ih, (for i = 1, . . . ,n − 1); mesh size h = 1/n
• V = W : piecewise linear functions(on intervals [xi , xi+1])
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 19

Nodal Basis
ϕi (x) :=
1h (x − xi−1) xi−1 < x < xi1h (xi+1 − x) xi < x < xi+1
0 otherwise
0,60,4 0,80,20
1
1
0,4
0,2
x
0
0,8
0,6
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 20
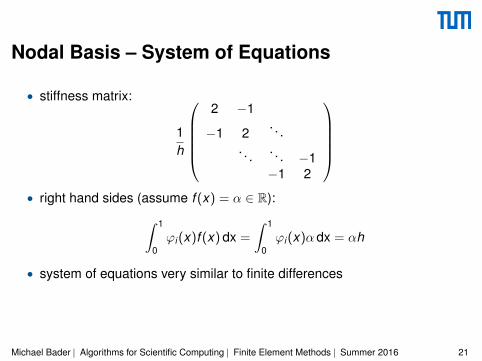
Nodal Basis – System of Equations
• stiffness matrix:
1h
2 −1
−1 2. . .
. . . . . . −1−1 2
• right hand sides (assume f (x) = α ∈ R):∫ 1
0ϕi (x)f (x) dx =
∫ 1
0ϕi (x)α dx = αh
• system of equations very similar to finite differences
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 21
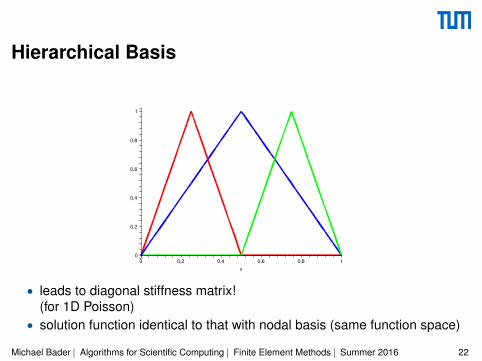
Hierarchical Basis
0,60,4 0,80,20
1
1
0,4
0,2
x
0
0,8
0,6
• leads to diagonal stiffness matrix!(for 1D Poisson)
• solution function identical to that with nodal basis (same function space)
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 22
Part III
Finite Element Methods – BasisFunctions for 2D
Hierarchical Basis in 2DQuadtrees and Hierarchical Bases
Quadtrees to Represent ObjectsHierarchical Basis vs. Quadtree
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 23
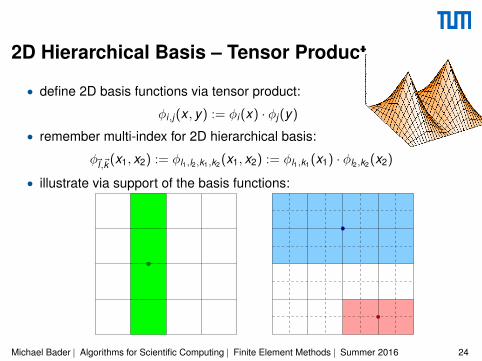
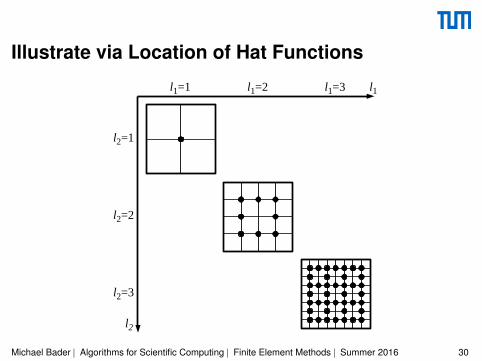
2D Hierarchical Basis – Tensor Product
• define 2D basis functions via tensor product:
φi,j (x , y) := φi (x) · φj (y)
• remember multi-index for 2D hierarchical basis:
φ~l,~k (x1, x2) := φl1,l2,k1,k2 (x1, x2) := φl1,k1 (x1) · φl2,k2 (x2)
• illustrate via support of the basis functions:
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 24
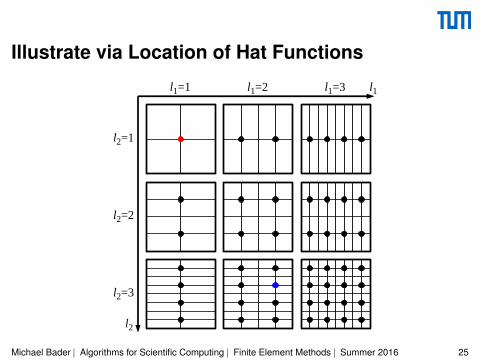
Illustrate via Location of Hat Functions
l1=1 l1=2 l1=3 l1
l2=1
l2=2
l2=3
l2
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 25

Adding Adaptivity: Quadtrees
Quadtrees to Represent Objects:
• start with an initial square (covering the entire domain)• recursive substructuring into four subsquares• adaptive refinement?
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 26
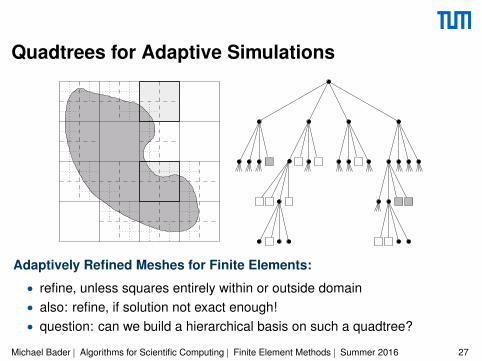
Quadtrees for Adaptive Simulations
Adaptively Refined Meshes for Finite Elements:
• refine, unless squares entirely within or outside domain• also: refine, if solution not exact enough!• question: can we build a hierarchical basis on such a quadtree?
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 27
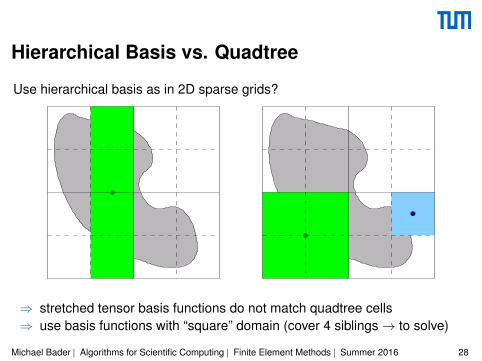
Hierarchical Basis vs. Quadtree
Use hierarchical basis as in 2D sparse grids?
⇒ stretched tensor basis functions do not match quadtree cells⇒ use basis functions with “square” domain (cover 4 siblings→ to solve)
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 28
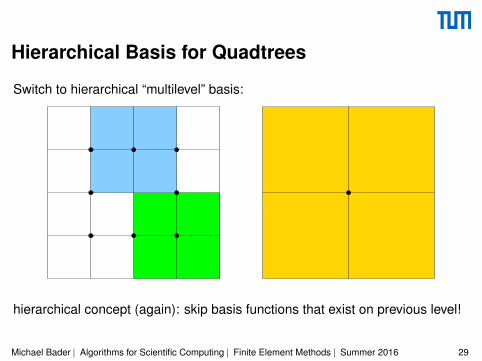
Hierarchical Basis for Quadtrees
Switch to hierarchical “multilevel” basis:
hierarchical concept (again): skip basis functions that exist on previous level!
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 29
Illustrate via Location of Hat Functions
l1=1 l1=2 l1=3 l1
l2=1
l2=2
l2=3
l2
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 30

Quadtree-Compatible Hierarchical BasisBasis Functions
Similar to tensor-product basis:• Level-wise hierarchical increments
W~l := spanφ~l,~i~i∈I~l
• Only use “diagonal” levels:
~l := l , . . . , l
• Omit grid points for which all indices areeven:
I~l := ~i : ~1 ≤~i < 2~n, any ij odd
l1=1 l1=2 l1=3 l1
l2=1
l2=2
l2=3
l2
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 31
Part IV
Finite Element Methods – TowardsImplementation
FEM and Hierarchical Basis TransformHierarchical Basis TransformationFEM and Hierarchical Basis TransformElement Stiffness MatricesWorkflow
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 32
Project: 2D Adaptive Hierarchical Basis
Consider:• 2D Poisson problem• FEM with quadtree-compatible hierarchical basis• adaptive quadtree-based hierarchical basis
Discuss (again):• how to compute the stiffness matrix?• what do you need to compute, if you add a hierarchical basis function?• how do you know when to add a basis function?
Idea: move from node-oriented to element-oriented approach
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 33

Recall: Hierarchical Basis Transformation
0,60,4 0,80,20
1
1
0,4
0,2
x
0
0,8
0,6
−→
0,60,4 0,80,20
1
1
0,4
0,2
x
0
0,8
0,6
• represent “wider” hat function φ1,1(x) via basis functions φ2,j (x)
φ1,1(x) = 12φ2,1(x) + φ2,2(x) + 1
2φ2,3(x)
• consider vector of hierarchical/nodal basis functionsand write transformation as matrix-vector product:ψ2,1(x)
ψ2,2(x)ψ2,3(x)
:=
φ2,1(x)φ1,1(x)φ2,3(x)
=
1 0 012 1 1
20 0 1
φ2,1(x)φ2,2(x)φ2,3(x)
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 34
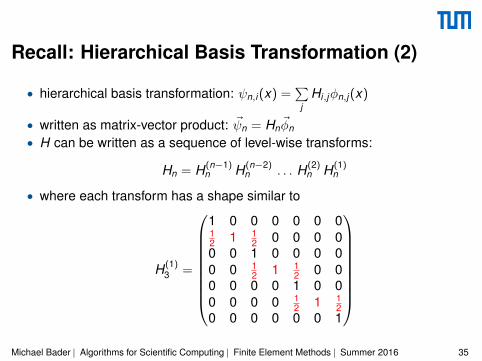
Recall: Hierarchical Basis Transformation (2)
• hierarchical basis transformation: ψn,i (x) =∑
jHi,jφn,j (x)
• written as matrix-vector product: ~ψn = Hn~φn
• H can be written as a sequence of level-wise transforms:
Hn = H(n−1)n H(n−2)
n . . . H(2)n H(1)
n
• where each transform has a shape similar to
H(1)3 =
1 0 0 0 0 0 012 1 1
2 0 0 0 00 0 1 0 0 0 00 0 1
2 1 12 0 0
0 0 0 0 1 0 00 0 0 0 1
2 1 12
0 0 0 0 0 0 1
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 35

Recall: Hierarchical Coordinate Transformation
• consider function f (x) ≈∑
iaiψn,i (x) represented via hier. basis
• wanted: corresponding representation in nodal basis∑j
bjφn,j (x) =∑
i
aiψn,i (x) ≈ f (x)
• with ψn,i (x) =∑
jHi,jφn,j (x) we obtain
∑j
bjφn,j (x) =∑
i
ai
∑j
Hi,jφn,j (x) =∑
j
∑i
aiHi,jφn,j (x)
• compare coordinates and get
bj =∑
i
Hi,jai =∑
i
(HT )
j,i ai
• written in vector notation: b = HT a
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 36
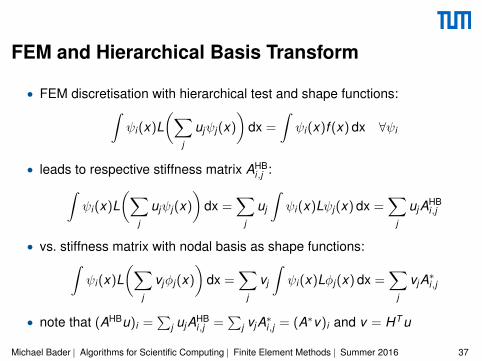
FEM and Hierarchical Basis Transform
• FEM discretisation with hierarchical test and shape functions:∫ψi (x)L
(∑j
ujψj (x)
)dx =
∫ψi (x)f (x) dx ∀ψi
• leads to respective stiffness matrix AHBi,j :∫
ψi (x)L(∑
j
ujψj (x)
)dx =
∑j
uj
∫ψi (x)Lψj (x) dx =
∑j
ujAHBi,j
• vs. stiffness matrix with nodal basis as shape functions:∫ψi (x)L
(∑j
vjφj (x)
)dx =
∑j
vj
∫ψi (x)Lφj (x) dx =
∑j
vjA∗i,j
• note that (AHBu)i =∑
j ujAHBi,j =
∑j vjA∗i,j = (A∗v)i and v = HT u
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 37
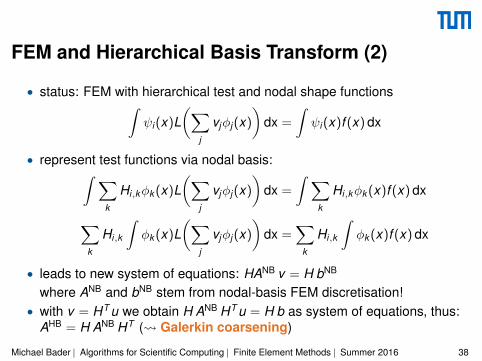
FEM and Hierarchical Basis Transform (2)
• status: FEM with hierarchical test and nodal shape functions∫ψi (x)L
(∑j
vjφj (x)
)dx =
∫ψi (x)f (x) dx
• represent test functions via nodal basis:∫ ∑k
Hi,kφk (x)L(∑
j
vjφj (x)
)dx =
∫ ∑k
Hi,kφk (x)f (x) dx
∑k
Hi,k
∫φk (x)L
(∑j
vjφj (x)
)dx =
∑k
Hi,k
∫φk (x)f (x) dx
• leads to new system of equations: HANB v = H bNB
where ANB and bNB stem from nodal-basis FEM discretisation!• with v = HT u we obtain H ANB HT u = H b as system of equations, thus:
AHB = H ANB HT ( Galerkin coarsening)
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 38

Element Stiffness Matrices
• domain Ω splitted into finite elements Ω(k):
Ω = Ω(1) ∪ Ω(2) ∪ · · · ∪ Ω(n)
• observation: basis functions are defined element-wise• use:
∫ ba f (x)dx =
∫ ca f (x)dx +
∫ bc f (x)dx
• element-wise evaluation of the integrals:∫Ω
∇v · ∇u dx =∑
k
∫Ω(k)
∇v · ∇u dx∫Ω
vf dx =∑
i
∫Ω(i)
vf dx
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 39
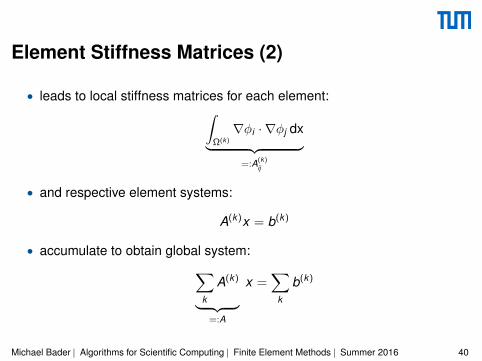
Element Stiffness Matrices (2)
• leads to local stiffness matrices for each element:∫Ω(k)
∇φi · ∇φj dx︸ ︷︷ ︸=:A(k)
ij
• and respective element systems:
A(k)x = b(k)
• accumulate to obtain global system:∑k
A(k)
︸ ︷︷ ︸=:A
x =∑
k
b(k)
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 40

Element Stiffness Matrices (3)
Some comments on notation:• assume: 1D problem, n elements (i.e. intervals)• in each element only two basis functions are non-zero!
• hence, almost all A(k)ij are zero:
A(k)ij =
∫Ω(k)
∇φi · ∇φj dx
• only 2× 2 elements of A(k) are non-zero• therefore convention to omit zero columns/rows⇒ leaves only unknowns that are in Ω(k)
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 41
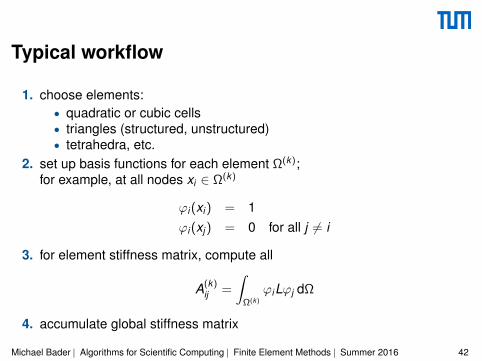
Typical workflow
1. choose elements:• quadratic or cubic cells• triangles (structured, unstructured)• tetrahedra, etc.
2. set up basis functions for each element Ω(k);for example, at all nodes xi ∈ Ω(k)
ϕi (xi ) = 1ϕi (xj ) = 0 for all j 6= i
3. for element stiffness matrix, compute all
A(k)ij =
∫Ω(k)
ϕiLϕj dΩ
4. accumulate global stiffness matrix
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 42
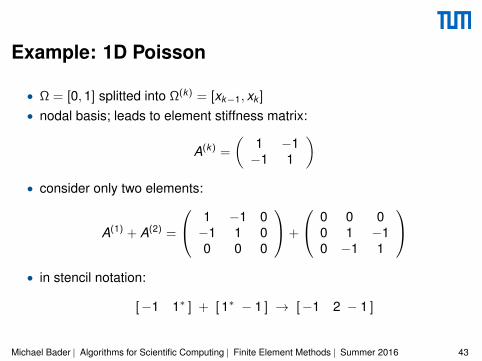
Example: 1D Poisson
• Ω = [0,1] splitted into Ω(k) = [xk−1, xk ]
• nodal basis; leads to element stiffness matrix:
A(k) =
(1 −1−1 1
)• consider only two elements:
A(1) + A(2) =
1 −1 0−1 1 00 0 0
+
0 0 00 1 −10 −1 1
• in stencil notation:
[−1 1∗ ] + [ 1∗ − 1 ] → [−1 2 − 1 ]
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 43
Project: Adaptive Hierarchical Basis
Consider:• 1D Poisson problem• FEM with hierarchical basis• however: not all basis functions used on each grid→ adaptive hierarchical basis
Discuss:• how to compute the stiffness matrix?• what do you need to compute, if you add a hierarchical basis function?• how do you know when to add a basis function?
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 44

Example: 2D Poisson
• −∆u = f on domain Ω = [0,1]2
• splitted into Ω(i,j) = [xi−1, xi ]× [xj−1, xj ]• bilinear basis functions
ϕij (x , y) = ϕi (x)ϕj (y)
• “pagoda” functions
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 45

Example: 2D Poisson (2)
• leads to element stiffness matrix:
A(k) =
2 − 1
2 − 12 −1
− 12 2 −1 − 1
2
− 12 −1 2 − 1
2
−1 − 12 − 1
2 2
• accumulation leads to 9-point stencil −1 −1 −1
−1 8 −1−1 −1 −1
Michael Bader | Algorithms for Scientific Computing | Finite Element Methods | Summer 2016 46