first break interpretation using generalized linear … · el tipo de modelo utilizado para nuestro...
TRANSCRIPT

First Break Interpretation Using Generalized Linear
Inversion Dan Hampson and Brian Russell
María Virginia MasonOctubre 2008

2
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
INDICE GENERAL
Introducción……………………………………………………………........ 3 Modelado de Refracción iterativo ………………………………………….. 4 Teoría de Inversión Lineal………………………………………………….. 6 Ejemplo sintético…………………………………………………………… 9 Ejemplo de datos reales ……………………………………………………. 11 Conclusiones………………………………………………………………. 16

3
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
FIRST-BREAK INTERPRETATION USING GENERALIZED LINEAR INVERSION DAN HAMPSON and BRIAN RUSSELL RESUMEN Desde los primeros tiempos del método sísmico se han realizado varias investigaciones acerca de la obtención de información detallada de las capas más superficiales a partir de refracciones en registros sísmicos. Esta información es utilizada para calcular valores iniciales de estáticas para los datos sísmicos. En este trabajo, se usa la redundancia que presenta un CDP shooting para realzar la exactitud de la solución y reducir el efecto de errores en el picado. El usuario ingresa un modelo inicial de subsuelo, normalmente consistente de un número de capas planas con velocidad constante. Luego el modelo es actualizado iterativamente mediante un algoritmo de inversión lineal generalizada (GLI) de manera tal de reducir la diferencia entre los tiempos observados para los primeros arribos y los calculados a partir del modelo. Los tiempos del modelo son calculados mediante trazado de rayos. Dos ventajas del algoritmo de GLI por sobre otros anteriores son: 1) la redundancia de los tiempos observados reduce la sensibilidad de la solución ante errores de picado, y 2) la respuesta final está “obligada” a permanecer razonablemente cerca del modelo geológico inicial. Este trabajo está dividido en cuatro partes. En la primera, se describe el procedimiento en forma conceptual. En la segunda, se analiza detalladamente la teoría del algoritmo. En la tercera, se muestran resultados que demuestran la convergencia del método a través de varias iteraciones. Finalmente, la cuarta parte muestra el funcionamiento del método sobre varios ejemplos reales. INTRODUCCION La presencia del weathering somero de baja velocidad puede causar problemas serios en el procesamiento de datos sísmicos. Este trabajo está avocado a la compensación de estos efectos mediante la estimación de un conjunto de correcciones estáticas usando arribos de refracciones. Dos de los efectos principales que resultan de tales condiciones del weathering son el deterioro del stack debido a un desalineamiento en el CDP, y la distorsión en los tiempos estructurales de reflectores profundos. Ambos efectos resultan de retrasos temporales introducidos por capas geológicas con espesor y velocidad variables. Si este patrón de retrasos es analizado con Fourier, puede demostrarse que aquellas componentes cuya longitud de onda es más corta que el cable son las principal responsables del deterioro de la calidad del stacking, mientras que aquellas

4
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
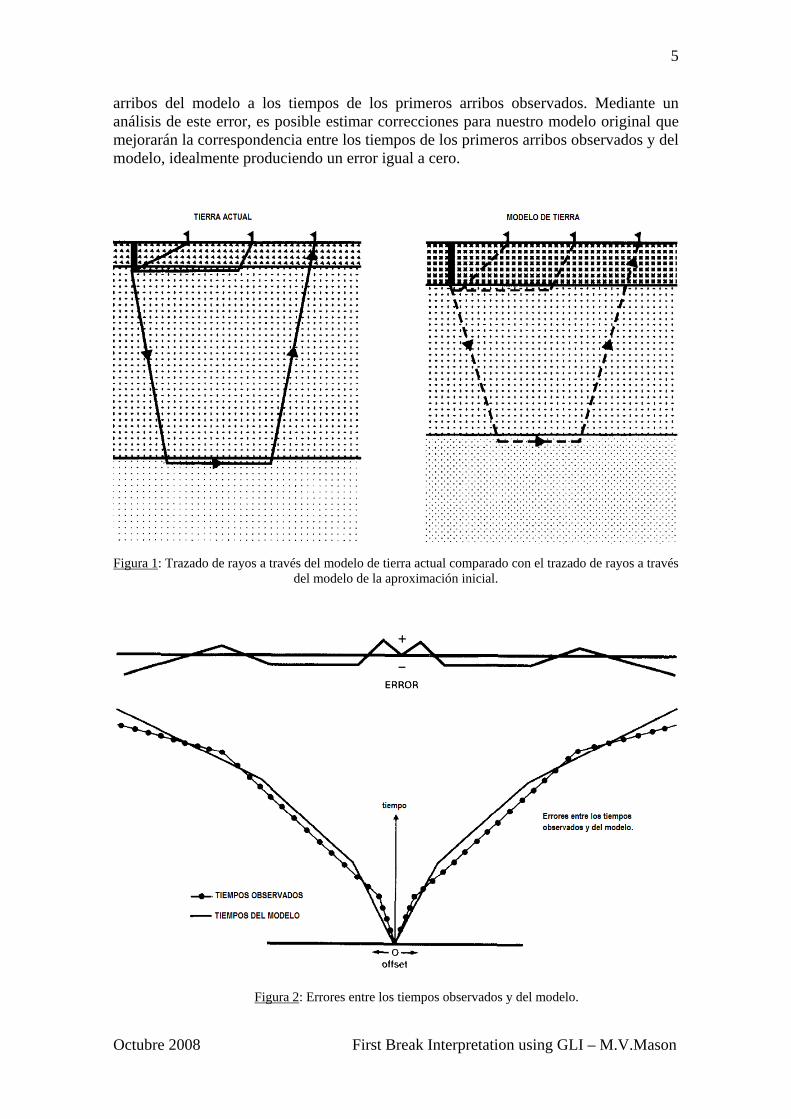
componentes con longitud de onda más larga provocan errores estructurales en los reflectores más profundos. Como se sabe que los programas de estáticas residuales que analizan los datos de reflexiones son incapaces de estimar estas componentes de larga longitud de onda en una forma precisa (Wiggins et al., 1976), estos programas pueden mejorar la calidad del stacking dejando errores en los tiempos estructurales. Un procedimiento alternativo para estimar corrimientos estáticos es analizar los tiempos de los primeros arribos correspondientes a las refracciones en las capas someras de baja velocidad. Si los offsets (fuente-receptor) están distribuidos correctamente, tales arribos deberían contener toda la información necesaria para corregir las componentes estáticas de longitudes de onda larga y corta. El análisis de los arribos de refracciones ha sido tema de estudio durante varios años y muchos métodos han sido propuestos. Sin embargo, mientras que estos métodos son adecuados para una interpretación hecha a mano de registros individuales, tienden a tener varias limitaciones al ser aplicados al análisis con computadora de datos multi-fold. Estas limitaciones incluyen restricciones en el modelo del subsuelo somero, una estimación sólo de la componente estática de larga longitud de onda, dificultad en la automatización de la computadora, sensibilidad a los errores en el picado de tiempos de arribo, y la incapacidad de usar la redundancia completa que implica el CDP shooting. Con el fin de evitar estas limitaciones, Hampson y Russell han diseñado un método que desarrolla un modelo del subsuelo somero mediante un trazado iterativo de rayos. MODELADO DE REFRACCIÓN ITERATIVO Todos los métodos para el análisis de refracciones suponen algún modelo de la geología del subsuelo somero. Este suele consistir en una serie de capas cuyos espesores y velocidades pueden variar tanto lateralmente a lo largo de la línea, como verticalmente con la profundidad. Los tiempos de los primeros arribos dependen de los espesores y velocidades de cada capa, y el problema es determinar aquellos parámetros a partir de los tiempos medidos. La tentativa es realizar algunos cálculos usando los primeros arribos observados generados por estos parámetros. Por ejemplo, se ajusta una recta a través de un segmento elegido formado por primeros arribos, y se mide su pendiente y ordenada al origen (Knox, 1967). El problema con esto es que depende de un modelo muy restringido –por ejemplo, el ajuste con una recta asume que los refractores son localmente planos sin anomalías de corta longitud de onda. Un método alternativo es construir en forma iterativa un modelo de subsuelo basado en la información provista por los primeros arribos. El concepto básico es simple y puede ser comprendido a partir de las Figuras 1 y 2. Suponemos que la tierra actual consiste de dos capas de baja velocidad ubicadas sobre algún material de alta velocidad, como está representado en el sector izquierdo de la Figura 1. Esto resultaría en un conjunto de primeros arribos que serían registrados y graficados como “primeros arribos observados” en la Figura 2. Sin conocer la configuración actual de la tierra, podemos adivinar que las capas son como muestra el panel derecho de la Figura 1. Mediante un trazado de rayos, podríamos calcular los tiempos en los cuales suponemos que ocurrirían los primeros arribos, y los graficamos con el nombre de “primeros arribos del modelo” en la Figura 2. Generalmente, la aproximación del modelo tendrá un error y habrá una discrepancia entre los primeros arribos observados y los del modelo. La Figura 2 muestra el “error”, que es el resultado de restarle los tiempos de los primeros
5
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
arribos del modelo a los tiempos de los primeros arribos observados. Mediante un análisis de este error, es posible estimar correcciones para nuestro modelo original que mejorarán la correspondencia entre los tiempos de los primeros arribos observados y del modelo, idealmente produciendo un error igual a cero.
Figura 1: Trazado de rayos a través del modelo de tierra actual comparado con el trazado de rayos a través del modelo de la aproximación inicial.
Figura 2: Errores entre los tiempos observados y del modelo.

6
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
El tipo de modelo utilizado para nuestro modelo de refracción se muestra en la Figura 3. El subsuelo somero está compuesto por un número de capas de baja velocidad ubicadas por encima de un medio con velocidad alta. El espesor de cada capa puede variar como una función de la posición en superficie. La velocidad de cada capa puede variar lateralmente, pero no verticalmente. La velocidad de la primera capa se supone conocida. Esto es porque la primera capa suele ser tan delgada que con las geometrías típicas del disparo no hay información suficiente para determinar tanto su profundidad como su velocidad.
Figura 3: Parametrización del modelo utilizado para el análisis de refracción.
TEORIA DE INVERSION LINEAL La técnica descripta en la sección anterior es la de Inversión Lineal Generalizada. Esta es una técnica matemática muy poderosa cuyo campo de aplicación en problemas geofísicos ha sido descripto en numerosos trabajos (e.g., Lines and Treitel, 1984). En la teoría del método de inversión lineal generalizada (Backus and Gilbert, 1967), se elige un conjunto de parámetros representados por el vector M, donde:
M = (m1, m2,…., mk) T
Se supone que estos parámetros del modelo generan un conjunto de observaciones representadas por el vector:
T = (t1, t2,….., tn) T
a través de algunas relaciones funcionales no lineales, A: ti = Ai(m1, m2,….., mk), i=1,2,…,n (1)
7
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
En este problema particular, el vector M es el conjunto de todos los espesores y velocidades desconocidos en el modelo del subsuelo somero, el vector T es el conjunto de todos los tiempos correspondientes a los primeros arribos observados, y la relación A es el algoritmo para el trazado de rayos incorporando la ley de Snell. Empezando desde algún modelo inicial, M0, se calcula un conjunto de tiempos de arribo y se los compara con los tiempos medidos. Como hemos visto, las Figuras 1 y 2 muestran tal comparación, junto con el error residual entre los tiempos de arribo observados y calculados. El método de inversión lineal generalizada se reduce al análisis de este vector de error residual para determinar un conjunto de correcciones para el modelo. Si representamos al vector de error mediante ∆T y a los cambios en el modelo requeridos mediante M, luego ∆M es determinado a partir del conjunto de ecuaciones lineales: ∆T = B ∆M (2)
donde: ∆T = A (M j+1) - A (M j) Bij = δti / δmj
∆M = M j+1 – M j
j = iteración número j Notar que en esta ecuación se supone que se conoce la matriz B, cuyos elementos contienen a las derivadas δti / δmj. Cada elemento bij mide la sensibilidad del tiempo i calculado para el primer arribo, ti, ante cambios en el parámetro j del modelo, mj. De hecho, esos elementos son funciones del propio modelo y deben ser re-calculados en cada iteración. El cálculo se hace analíticamente, suponiendo que las velocidades y profundidades del modelo varían lo suficientemente lento como para que éste pueda ser considerado localmente lineal. Como resultado de un registro sísmico multi-fold, el sistema lineal (2) suele ser sobre-determinado, es decir que el número de tiempos correspondientes a primeros arribos excede el número de parámetros desconocidos del modelo. Esto permite alguna compensación para los errores que surgen del picado de los tiempos correspondientes a los primeros arribos. La solución es el ajuste por mínimos cuadrados: M = (BT B)-1 BT T (3) que compensará aquellos errores cuya distribución de probabilidad sea una función Gaussiana al azar con media cero. Desafortunadamente, los errores de picado suelen ser eventos grandes. Se debe implementar un algoritmo que detecte desviaciones en el error inusualmente grandes luego de varias iteraciones de la secuencia de inversión y que elimine estos “picks”. En la práctica, la inversión de la gran matriz BT B no es ni práctica ni necesaria, ya que cada aplicación de la ecuación (3) es un paso dentro de una serie de iteraciones, y no se requiere la solución exacta de M en cada paso. Es por esta razón que la solución (3) puede ser reemplazada por una aproximación iterativa adecuada.

8
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
La Figura 4 ilustra el procedimiento general. El usuario introduce una aproximación inicial para la configuración del subsuelo próximo a la superficie, indicándole al programa cuantas capas se esperan tener junto con sus velocidades y espesores aproximados. Generalmente, este es un modelo de capas planas, a pesar de que pueden requerirse modelos más complicados para situaciones con variaciones rápidas. El programa realiza una serie de iteraciones en las cuales se calculan los tiempos correspondientes a los primeros arribos, mediante trazado de rayos, y se los compara con los tiempos medidos; luego se modifica el modelo y se calcula un nuevo conjunto de tiempos. Este procedimiento se repite hasta alcanzar una correspondencia aceptable entre los tiempos observados y los del modelo.
Figura 4: Algoritmo general para el modelado iterativo.
A pesar de que tanto las velocidades como las profundidades pueden variar con cada estación, como fue implicado anteriormente en la Figura 3, el algoritmo puede hacerse más robusto forzando un modelo solución cuya variación sea más lenta. Esto aumenta el número de tiempos de primeros arribos utilizados para actualizar cualquier parámetro del modelo y disminuye el efecto de errores de picado aleatorios. Se espera que las velocidades de las capas varíen lentamente, cosa que no debería suceder para el caso de los espesores. De hecho, sus variaciones de alta frecuencia son precisamente la causa de las estáticas de corta longitud de onda mencionadas anteriormente. Forzar que un modelo sea suave significa que sólo las componentes de mayores longitudes de onda serán consideradas en la técnica del modelado iterativo. Las componentes de corta longitud de onda pueden ser estimadas al final del proceso como retrasos temporales simples consistentes con la superficie en el error residual final (Chun y Jacewitz, 1981).

9
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
EJEMPLO SINTETICO En las Figuras 5 a 7, se ilustra el método en un ejemplo de datos sintéticos. La Figura 5 muestra un modelo hipotético del subsuelo, consistente de dos capas de baja velocidad ubicadas por encima de un medio de mayor velocidad. Se simuló en el centro del modelo una gran anomalía correspondiente al weathering. Se creó un conjunto de arribos de refracciones mediante un trazado de rayos a través de este modelo. Estos arribos serán analizados por el algoritmo de inversión con el fin de recuperar el modelo original. Las Figuras 6 y 7 muestran el modelo y los errores residuales al principio y al final del cálculo. En la parte superior de la Figura 6 se muestra el sintético original, seguido de la aproximación inicial, que consistió de dos capas con espesores y velocidades uniformes. Tanto las velocidades de la segunda capa de baja velocidad como la del medio de alta velocidad tienen un error, así como también los espesores de las capas. La parte inferior de la Figura 6 muestra el error residual que resulta de restarle los tiempos del modelo (calculados mediante el trazado de rayos a través del modelo inicial) a los tiempos originales medidos. La geometría del disparo fue simulada con un cable de 96 trazas, por lo que cada uno de los patrones en la parte inferior de la figura 6 consiste de 96 puntos, mostrando el error en cada traza exactamente de la misma manera que en la parte superior de la Figura 3. Si la aproximación inicial ha sido correcta, los errores residuales deberían ser todos cero, y los patrones serían líneas planas a lo largo de las líneas de tiempo en la figura. Debido a la existencia de errores en la aproximación inicial, los patrones son una serie de líneas quebradas correspondiendo a los diferentes caminos refractores. En líneas generales, una pendiente no nula en un segmento indica un error en la velocidad mientras que un corrimiento en el tiempo indica un error en el espesor. Luego de cinco iteraciones el error residual es insignificante (Figura 7), y el modelo resultante se asemeja mucho al de entrada. En este simulacro, la condición que se le impuso al algoritmo de inversión fue usar un suavizado de seis estaciones – lo que significa que a medida que cada parámetro es actualizado, se usan en los cálculos los tiempos de arribo correspondientes a tres estaciones para cada lado. Como resultado, la respuesta final no tiene los bordes angulosos como aparecen en el sintético original. A pesar de que eso ha causado un error residual muy pequeño en este ejemplo sintético, el suavizado en conjuntos de datos reales dejará en los gráficos del error residual patrones de estáticas de corta longitud de onda consistentes con la superficie. Estos pueden ser removidos como corrimientos simples en el tiempo y pueden ser utilizados para corregir los datos sísmicos más a futuro. El ejemplo sintético muestra que el algoritmo de inversión, bajo condiciones ideales, puede invertir el proceso de trazado de rayos y recuperar el modelo original. Sin embargo, para que el método funcione sobre datos reales, se deben reunir tres condiciones. Primero, el modelo debe ser lo suficientemente complejo para describir el comportamiento en forma adecuada, pero debe tener una cantidad de parámetros significantemente menor que de observaciones (tiempos de primeros arribos reales). Esto significa que el usuario debe especificar el número correcto de capas, y que la geología debe variar lo suficientemente lento como para que el trazado de rayos sea apropiado. Un modelo con una gran cantidad de capas obligará al programa a estimar demasiados parámetros para el número de observaciones, y esto podría resultar en una

10
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
inestabilidad matemática. Segundo, la aproximación inicial debe estar lo suficientemente cerca de la respuesta correcta como para asegurar la convergencia con una cantidad razonable de iteraciones. (Afortunadamente, en la mayoría de las situaciones reales, la geología del subsuelo somero es bastante conocida por lo que ni la primera condición ni la segunda son un problema.) Tercero, los tiempos correspondientes a los primeros arribos que se ingresan deben estar libres de errores groseros. El algoritmo de inversión está idealmente adaptado para manejar errores aleatorios pequeños, pero los errores de picado suelen tener grandes saltos por ciclo. Si la frecuencia de los saltos no es muy grande, el programa puede ser utilizado para detectar errores de picado realizando varias iteraciones y buscando errores residuales excesivamente grandes. Este procedimiento ha sido utilizado con gran éxito. En general, se puede concluir que el método se adapta en forma ideal a aquellas áreas donde el subsuelo cercano a la superficie es restringido a dos o tres capas cuyos parámetros varían dentro de un rango limitado y predecible. La experiencia ha mostrado que esto describe un gran porcentaje de datos sísmicos de superficie, y que el algoritmo es una herramienta robusta y confiable que requiere muy poca intervención humana.
Figura 5: Modelo utilizado para generar refracciones sintéticas.
Figura 6: Modelo de aproximación inicial y errores residuales previos al modelado iterativo.

11
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
Figura 7: Resultado final luego de cinco iteraciones.
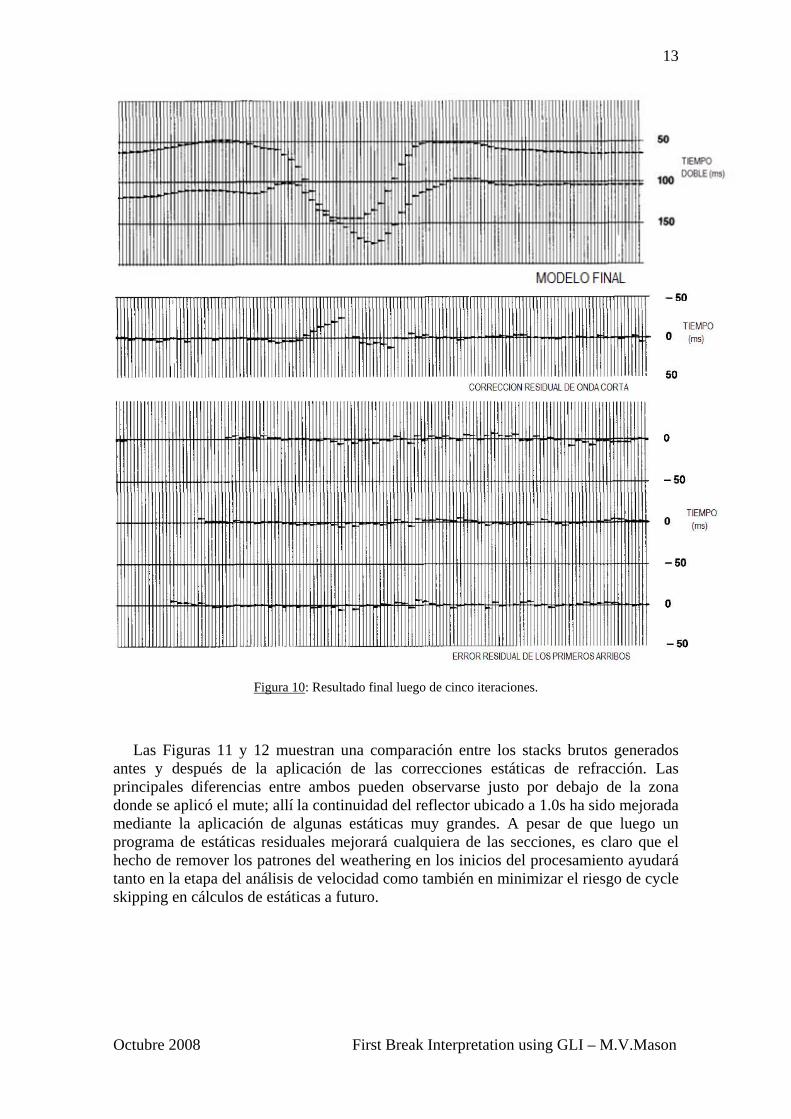
EJEMPLOS DE DATOS REALES A continuación se mostrará el funcionamiento del algoritmo de interpretación sobre dos conjuntos de datos reales. El primero fue elegido porque contiene una anomalía correspondiente al weathering particularmente grande, como se puede observar en la Figura 8. Los primeros arribos son muy claros y el algoritmo de picado automático ha tenido muy pocos problemas. En la parte superior de la Figura 9, se exhibe el modelo de aproximación inicial en función del tiempo de viaje doble hasta la base de cada una de las dos capas de baja velocidad. La aproximación inicial consistió de capas uniformes con velocidad constante. En la parte inferior de la Figura 9 se muestran los errores residuales de tres disparos en la vecindad de la anomalía correspondiente al weathering, donde el patrón consistente con la superficie es evidente. Luego de cinco iteraciones, el algoritmo ha convergido al resultado que se muestra en la Figura 10. Los espesores de ambas capas han cambiado considerablemente a partir de la aproximación inicial, incluyendo, por supuesto, a la gran anomalía. Como se usó un suavizador de seis estaciones en el cálculo de la profundidad, el paso a la izquierda de la anomalía fue modelado como una caída suave. Como consecuencia, el patrón del error mantuvo una corrección residual de corta longitud de onda luego del trazado de rayos a través del modelo suavizado. Este patrón fue estimado como un retraso temporal consistente con la superficie y es graficado es el panel central de la Figura 10. Al corregir los datos sísmicos, las estáticas de onda corta serán agregadas a aquellas calculadas usando el modelo final de subsuelo somero. En la parte inferior de la Figura 10, vemos que los errores residuales están muy cercanos al cero, indicando un buen ajuste entre los tiempos del modelo y los reales.

12
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
Figura 8: Perfil simple a partir de un conjunto de datos reales con la anomalía correspondiente al weathering.
Figura 9: Modelo de aproximación inicial y errores residuales en tres disparos cerca de la anomalía.
13
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
Figura 10: Resultado final luego de cinco iteraciones.
Las Figuras 11 y 12 muestran una comparación entre los stacks brutos generados antes y después de la aplicación de las correcciones estáticas de refracción. Las principales diferencias entre ambos pueden observarse justo por debajo de la zona donde se aplicó el mute; allí la continuidad del reflector ubicado a 1.0s ha sido mejorada mediante la aplicación de algunas estáticas muy grandes. A pesar de que luego un programa de estáticas residuales mejorará cualquiera de las secciones, es claro que el hecho de remover los patrones del weathering en los inicios del procesamiento ayudará tanto en la etapa del análisis de velocidad como también en minimizar el riesgo de cycle skipping en cálculos de estáticas a futuro.

14
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
Figura 11: Stack bruto luego de una corrección de elevación y uphole únicamente.

15
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
Figura 12: Stack bruto luego de un análisis automático de refracción. El segundo ejemplo de datos reales fue elegido porque contiene anomalías de estáticas tanto de larga como de corta longitud de onda. Esto está demostrado en la Figura 13, que es un stack bruto de la línea corregida por elevación y uphole. La estática de larga longitud de onda aparece como una componente estructural de variación lenta, con una variación máxima a través de la línea de alrededor de 20 ms. La componente de corta longitud de onda resulta en una pérdida de continuidad en algunos de los reflectores más débiles, especialmente los datos por encima de los 900 ms, y también en una franja vertical hacia el sector izquierdo del gap de baja cobertura.

16
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
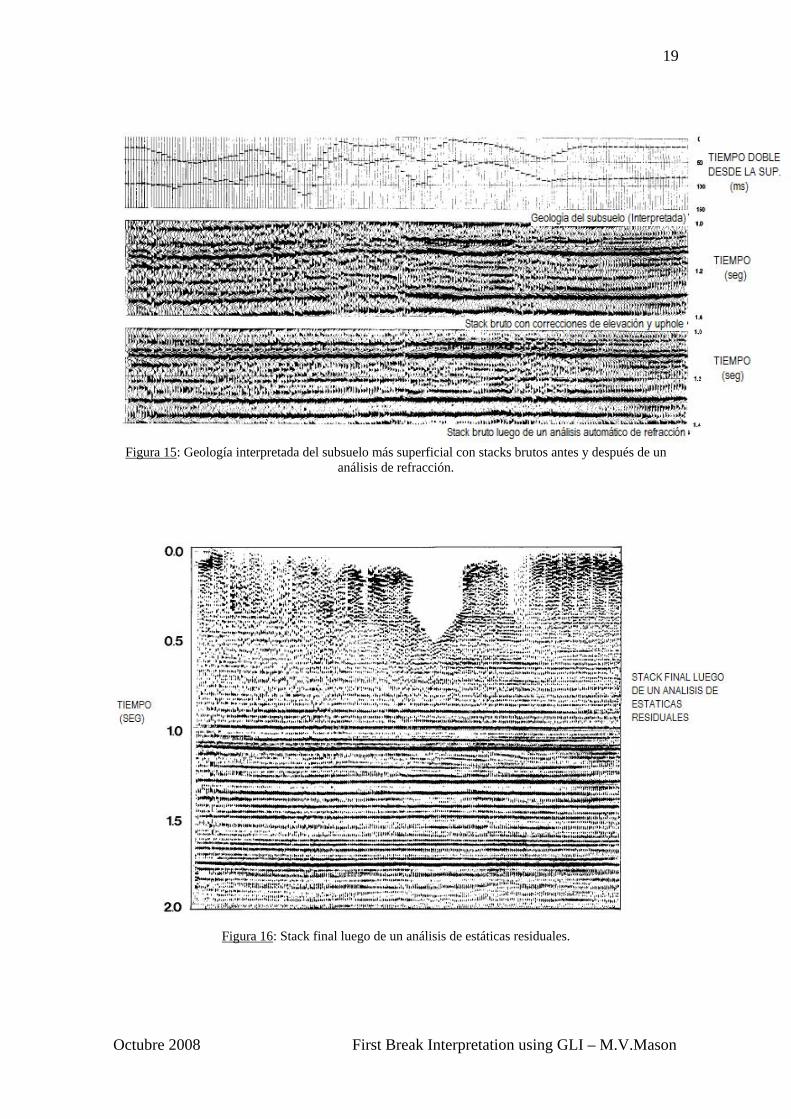
En la Figura 14, vemos el mismo stack luego de un análisis automático de refracción. En este resultado, tanto las soluciones de las estáticas de larga como de corta longitud de onda han sido mejoradas. La eliminación las estáticas de largo período resulta en una sección con más validez estructural. Debería quedar en claro que los programas de estáticas residuales basados en la correlación de zonas de reflexión son teóricamente incapaces de hallar una solución para este patrón de estáticas de largo período. La solución de estáticas de corto período resulta en una mejora en la continuidad de los datos, tanto en eventos ubicados a los 900 ms y por encima, y también en la franja de datos en la parte central de la línea. Para un mayor detalle de los resultados, la Figura 15 muestra una porción de los datos antes y después del análisis de refracción, como también el modelo de subsuelo más superficial que ha sido producido. Debe notarse que la estructura del modelo de subsuelo es reflejada en el patrón de estáticas de largo período que ha sido removido. También, las franjas verticales que presentan una continuidad pobre de las reflexiones, que se observan en los datos originales, corresponden a severos “paquetes” de weathering de corta longitud de onda. A pesar de que el análisis automático de refracción ha realizado un buen trabajo en encontrar las estáticas de corto período, no reemplaza totalmente al método tradicional de estáticas residuales. Es más, debería ser utilizado en conjunto con estos otros métodos para lograr resultados óptimos. Esto se muestra en la Figura 16, donde se puede observar la sección stacked de la Figura 14 luego de haberle realizado un análisis de estáticas residuales. Debe notarse que este proceso final ha sintonizado a la solución de estáticas del stack anterior. Debería volver a enfatizarse que este programa de estáticas residuales no hubiera resuelto las estáticas de largo período que se observan en la Figura 13. CONCLUSIONES En este trabajo se ha propuesto un método para el cálculo de correcciones estáticas basado en una técnica de inversión lineal generalizada que modela, en forma iterativa, el subsuelo más superficial mediante el uso de primeros arribos de refracciones. Las mayores ventajas de esto por sobre otros métodos tradicionales son:
• Mediante el uso de la redundancia de los CDP, las soluciones son estabilizadas y el efecto de los errores de picado es reducido.
• Se puede incorporar rápidamente información acerca de la geología del subsuelo ya conocida, como también cualquier condición geológica.
• Se minimizan suposiciones de un modelado restrictivo. • El algoritmo puede ser automatizado y requiere muy poca intervención del
usuario. Se mostraron dos casos de datos reales que verifican que las componentes de larga y corta longitud de onda de las estáticas fueron instrumentales en la mejora de la sección stacked. A pesar de que aún se necesita un paso de estáticas residuales para sintonizar la imagen sísmica, el hecho de remover las mayores anomalías de las estáticas en los primeros pasos del procesamiento corrige los tiempos de los eventos y asegura un procesamiento óptimo en las etapas siguientes.

17
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
Figura 13: Segundo ejemplo: stack bruto con correcciones de elevación y uphole únicamente.

18
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
Figura 14: Segundo ejemplo: Stack bruto luego de un análisis automático de refracción.
19
Octubre 2008 First Break Interpretation using GLI – M.V.Mason
Figura 15: Geología interpretada del subsuelo más superficial con stacks brutos antes y después de un análisis de refracción.
Figura 16: Stack final luego de un análisis de estáticas residuales.