flow estimation
TRANSCRIPT

8/7/2019 Flow Estimation
http://slidepdf.com/reader/full/flow-estimation 1/9
Fast Panoramic Image Mosaicing UsingOne-dimensional Flow Estimation
In this paper, we propose a fast method for panoramic image mosaicing using one-dimensional (1D) flow estimation. First, the 1D flow vectors are estimated at each pixel in xand y directions. Then the global affine parameters are estimated from 1D flows using the
iterative least-squares method. The accurate parameters are obtained by iteratively repeated
optimization in x and y directions. We have implemented the proposed method on a conventionallow-cost PC. The experimental results show that the image mosaicing is possible in near-real time.
# 2002 Elsevier Science Ltd. All rights reserved.
Junichi Hoshino1 and Masakatsu Kourogi2
1College of Engineering Systems, University of Tsukuba,
1-1-1 Tennoudai, Tsukuba,
Ibaraki 305-8573, Japan2National Institute of Advanced Industrial Science and Technology,
1-1-1 Umezono, Tsukuba,
Ibaraki 305-8568, Japan
Introduction
Panoramic image mosaicing is a useful technique for
many applications such as virtual reality, video surveil-
lance, and aerial image analysis [1 – 10]. One of the
problems of panoramic image mosaicing is that its
computational cost is so high that the image processing
required usually cannot be done in real time by a low-
cost PC.
Real-time performance is important for applica-
tions such as video surveillance because we need to see
current situations. However, it often takes more than
several seconds to calculate transform coefficients
between images. For example, an optimization tech-
nique such as the Levenberg–Marquadt method
[3,4] requires an accurate initial estimation of the
coefficients, and more than a few hundred iterations to
converge. It takes nearly a minute using standard
implementations.
In this paper, we propose a fast method for
panoramic image mosaicing using 1D flow estimation.
First, the approximate motion vectors x and y directions
are estimated. Then the global affine parameters are
estimated using the least-squares method. The accurate
parameters are obtained by iteratively repeated optimi-
zation in x and y directions.
We have implemented the proposed method on a
conventional low-cost PC. The experimental results
show that the accuracy of the image mosaicing
is comparable to the existing methods, and
achieves 10–100 times faster performances traditional
methods.
1077-2014/02/$35.00 r 2002 Elsevier Science Ltd. All rights reserved.
Real-Time Imaging 8, 95–103 (2002)
doi:10.1006/rtim.2001.0257, available online at http://www.idealibrary.com on
8/7/2019 Flow Estimation
http://slidepdf.com/reader/full/flow-estimation 2/9
Previous works
One of the conventional methods is a cylindrical
panorama which covers a horizontal view [6]. This
method limits the camera motion around the horizontal
axis of the optical center, and forces users to carry a
tripod. The other typical approach of making image
mosaicing is to estimate the transform coefficients
between images such as affine transform or perspective
transform. For example, Szeliski created panoramic
images by minimizing the sum of the squared intensity
errors using the Leverberg–Marquadt method [3,4]. This
type of non-linear optimization technique requires a
good initial estimate (e.g. x and y translation compo-
nents) which is often computationally expensive. For
example, the popular method described in [3] applies the
correlation-based matching within the whole image. It
takes more than several seconds only to estimate the
initial translation component. In addition, the Leven-berg–Marquadt method needs more than a few hundred
iterations to converge. It sometimes takes nearly a
minute for computation.
Some methods extract image features such as corners,
and estimate transform coefficients by feature matching
[7–9]. However, the feature extraction and matching is
often computationally expensive. The feature matching
process is complex because some features which appear
in one frame can disappear in the other frames. Someresearchers focus on the shorter processing time using
the feature-based matching [9]. However, it still takes
10 s to overlay 2 images.
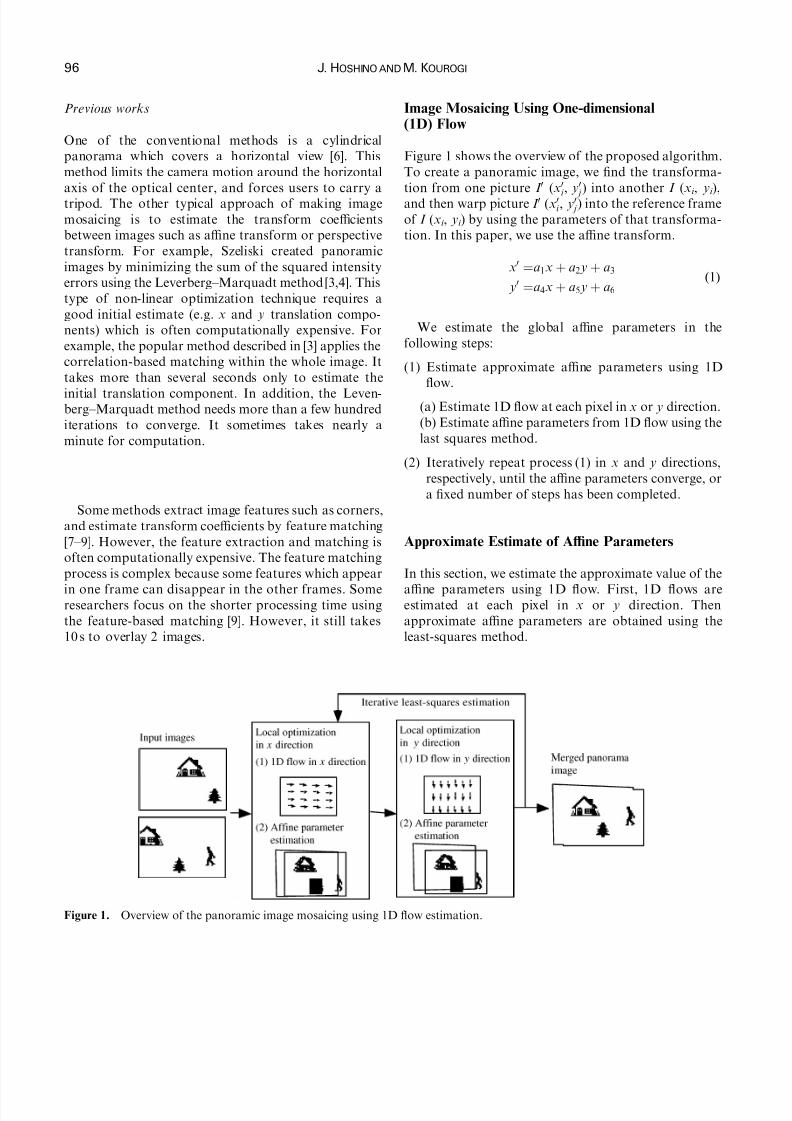
Image Mosaicing Using One-dimensional(1D) Flow
Figure 1 shows the overview of the proposed algorithm.
To create a panoramic image, we find the transforma-
tion from one picture I 0 (x0
i
; y0
j
) into another I (xi , yi ),
and then warp picture I 0 (x0i ; y0
j ) into the reference frame
of I (xi , yi ) by using the parameters of that transforma-
tion. In this paper, we use the affine transform.
x0 ¼a1x þ a2 y þ a3
y0 ¼a4x þ a5 y þ a6
ð1Þ
We estimate the global affine parameters in the
following steps:
(1) Estimate approximate affine parameters using 1D
flow.
(a) Estimate 1D flow at each pixel in x or y direction.
(b) Estimate affine parameters from 1D flow using the
last squares method.
(2) Iteratively repeat process (1) in x and y directions,
respectively, until the affine parameters converge, or
a fixed number of steps has been completed.
Approximate Estimate of Affine Parameters
In this section, we estimate the approximate value of the
affine parameters using 1D flow. First, 1D flows areestimated at each pixel in x or y direction. Then
approximate affine parameters are obtained using the
least-squares method.
Figure 1. Overview of the panoramic image mosaicing using 1D flow estimation.
96 J. HOSHINO AND M. KOUROGI

8/7/2019 Flow Estimation
http://slidepdf.com/reader/full/flow-estimation 3/9
1D flow estimation
Let the displacements in x and y directions be (vx,v y).
The error between a background I (xi , yi) and an input
image I 0 (x0i ; y0
j ) is
I ðxi þ vx; yi þ v yÞ À I 0ðx0i ; y0
i Þ
¼ I ðxi ; yi Þ þ vx
@
@xI ðxi ; yi Þ þ v y
@
@ yI ðxi ; yi Þ À I 0ðx0
i ; y0i Þ
ð2Þ
Let @I (xi , yi )/@x be I x, and @I (xi , yi )/@ y be I y. I x and I y
can be obtained by using the finite difference scheme (i.e.I x ¼ I ðxi ; y j Þ À I ðxi þ1; y j Þ; I y ¼ I ðxi ; y j Þ À I ðxi ; y j þ1Þ).
By substituting I t ¼ I ðxi ; yi Þ À I 0ðx0i ; y0
j Þ into Eqn. (4),
we obtain
I xvx þ I yv y þ I t ¼ 0 ð3Þ
This is the well-known optical flow constraint
equation [17,18]. We cannot solve Eqn (4) because
we have only one equation for the two motion
parameters. The conventional optical flow methods
introduce constraints to estimate motion parameters in
two dimensions [17,18]. However, such constraints
typically cause the increase in computational costs
(Figure 2).
Instead of introducing additional constraints, we
approximately estimate the optical flow in one dimen-
sion to reduce computational costs. For example, if we
estimate the 1D flow in x direction
rx ¼ ðÀI t=I x; 0Þ ð4Þ
Also, we obtain the 1D flow in y direction
r y ¼ ð0; ÀI t=I yÞ ð5Þ
We use these 1D flows at each pixel to estimate affine
parameters. These 1D flows are quite noisy in general.
However, we can increase the accuracy of the estimationusing the iterative least-squares method described in the
next section.
Affine parameter estimation
In the next step, the global affine parameters are
estimated from the 1D motion vectors. Given a motion
vector (vx, v y) and a threshold th, the motion vectors can
be selected by testing the following condition [19]:
jI ðx; yÞ À I 0ðx þ vx; y þ v yÞjoth ð6Þ
Since the true motion vector should satisfy this
equation, it is possible to verify the 1D motion vectors
by testing this condition. We use a threshold th=10 for
experiments. The regions are not empirically selected
when Eqn. (6) is applied. Eqn. (6) is computed at all the
points in the image. Only 1D flow vectors within the
overlapped regions are used for affine parameter
estimation.
Then, we obtain affine parameters using the least-
squares method [16]. Let Ax ¼ ½a1; a2; a3�T; A y ¼
½a4; a5; a6�T and ¼ ½1; x; y�T. Then Eqn. (1) can beexpressed as
vxðx; yÞ ¼ TAx; v yðx; yÞ ¼ TA y ð7Þ
The affine parameters Ax and A y can be estimated as
follows:
Ax ¼X
Th iÀ1 X
½vxðx; yÞ�
A y ¼
XT
h iÀ1
X½v yðx; yÞ�
ð8Þ
Iterative Update of Affine Parameters
The affine parameters estimated in the previous section
are not accurate because of errors in 1D flow estimation.
In this section, we increase the accuracy of the affine
parameters by iteratively repeating the optimization in x
and y directions.
x-coordinate
Intensity
v x
I t
Slope = I x
Figure 2. Approximate estimate of vectors; ( ) I (xi , yi );( ) I 0ðx0
i ; y0i Þ.
FAST PANORAMIC IMAGE MOSAICING 97

8/7/2019 Flow Estimation
http://slidepdf.com/reader/full/flow-estimation 4/9
The process of the iterative estimation can be
summarized as follows.
(1) When t ¼ 0 (t represents the number of iterations),
we obtain the initial estimate of affine parameters A0
using the method described in the previous section.
(2) When t ! 1, the affine parameters are updated usingAtÀ1 ¼ fa1; . . . ; a6g. First, new 1D flows are
estimated:
rx 0
¼ðÀI t=I x þ x0i ; y0
i Þ
r y 0
¼ðx0i ; ÀI t=I y þ y0
i Þð9Þ
where ðx0i ; y0
i Þ is
x0i ¼a1xi þ a2 yi þ a3
y0i ¼a4xi þ a5 yi þ a6
ð10Þ
I t can be obtained as follows:
I t ¼ I ðx; yÞ À I 0ðx þ x0i ; y þ y0
i Þ ð11Þ
Then, we estimate new affine parameters from frx0
i g
or fr y0
i g using the least-squares method as described
earlier.
(3) Repeat (2) in x and y directions, respectively, until
the affine parameters converge, or repeat the fixed
number of iterations.
Experiments
The proposed method is implemented using a conven-
tional PC (CPU: PentiumII-400 MHz, RAM 128M, OS:
Linux-2.0). We show the following experimental results
to demonstrate the effectiveness of the proposed method.
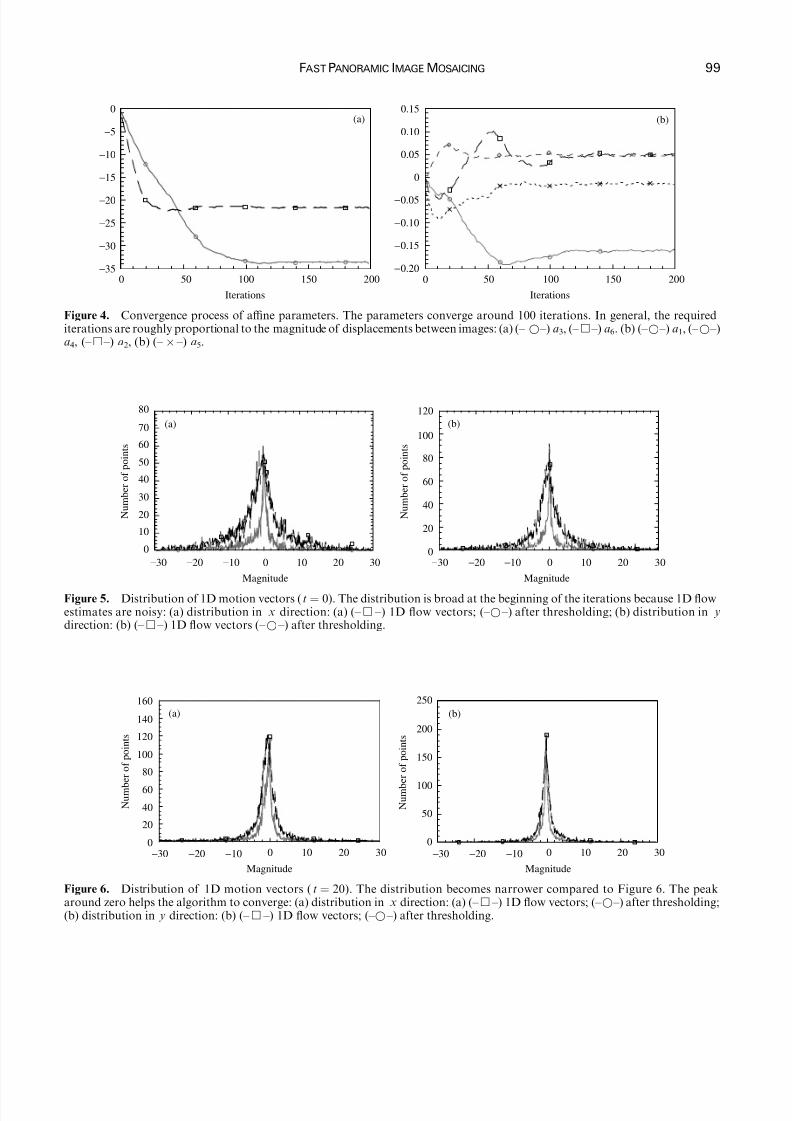
Convergence process and statistics
We present a simple case of panoramic image mosaicing
to show the typical behavior of the proposed method.
Figure 3(a) and (b) are input images. Figure 4 shows the
convergence process of affine parameters. Figure 3(c) isthe result of merging two pictures with the affine
parameters fa1; . . . ; a6g ¼ ð À0.160, 0.046, À33.925,
0.047, À0.017, À21.802). Figures 5 and 6 show the
Figure 3. Experimental results using 2 pictures: (a) input image 1; (b) input image 2; (c) overlapping (a) (b).
98 J. HOSHINO AND M. KOUROGI
8/7/2019 Flow Estimation
http://slidepdf.com/reader/full/flow-estimation 5/9
0
20
40
60
80
100
N u m b e r o f p o i n t s
120
0
10
20
30
40
50
60
70
−30 −20 −10 0 10 20 30
N u m b e r o f p o i n t s
80
Magnitude
−30 −20 −10 0 10 20 30
Magnitude
(a) (b)
Figure 5. Distribution of 1D motion vectors (t ¼ 0). The distribution is broad at the beginning of the iterations because 1D flowestimates are noisy: (a) distribution in x direction: (a) (– & –) 1D flow vectors; (– * –) after thresholding; (b) distribution in ydirection: (b) (– & –) 1D flow vectors (– * –) after thresholding.
0
50
100
150
200
−30 −20 −10 0 10 20 30
N u m b
e r o f p o i n t s
250
Magnitude
0
20
40
60
80
100
120
140
−30 −20 −10 0 10 20 30
N u m b
e r o f p o i n t s
160
Magnitude
(b)(a)
Figure 6. Distribution of 1D motion vectors (t ¼ 20). The distribution becomes narrower compared to Figure 6. The peakaround zero helps the algorithm to converge: (a) distribution in x direction: (a) (– & –) 1D flow vectors; (– * –) after thresholding;(b) distribution in y direction: (b) (– & –) 1D flow vectors; (– * –) after thresholding.
−35
−30
−25
−20
−15
−10
−5
0
0 50 100 150 200−0.20
−0.15
−0.10
−0.05
0
0.05
0.10
0.15
Iterations
0 50 100 150 200
Iterations
(a) (b)
Figure 4. Convergence process of affine parameters. The parameters converge around 100 iterations. In general, the requirediterations are roughly proportional to the magnitude of displacements between images: (a) (– * –) a3, (– & –) a6. (b) (– * –) a1, (– * –)a4, (– & –) a2, (b) (– Â –) a5.
FAST PANORAMIC IMAGE MOSAICING 99

8/7/2019 Flow Estimation
http://slidepdf.com/reader/full/flow-estimation 6/9
distribution of 1D flow at the different stages of the
iterations, where (a) shows the component of
rx ¼ ðÀI t; =I x; 0Þ, and (b) shows the y component of
r y ¼ ð0; ÀI t; =I yÞ. We can see that the distribution is
slightly biased to the translational direction. This
characteristic contributes the algorithm to converge to
the true estimates. Tables 1 and 2 show the statistics of
the distributions. (V x, V y) denote the original 1D flow,
and (V 0x; V 0 y) the 1D flow after thresholding. For thereference, the statistics of the normal distribution is
skewness=0 and kurtosis=3. We can observe that the
flow vectors are biased to the true estimates. The
averages of the distribution correspond to the magni-
tude of translational shift during one iteration. The
positive value of the skewness means the distribution
leans toward the left (negative x and y directions).
Comparison with the normal flow estimation
In this paper, we use 1D flow in x and y directions toestimate global affine parameters. The other possible 1D
flow is the normal flow [10–15] which has been used to
Table 1. Statistics of 1D motion vectors (t ¼ 0). The distribu-tion is broad at the beginning of the iterations, and biasedtoward the true estimates
Average Variance Skewness Kurtosis
V x À0.1878 51.917 0.3571 7.9761
V y À0.0148 64.929 0.0655 7.8291V 0x À0.4853 23.157 0.9545 11.984V 0 y À0.4005 31.333 0.1276 12.172
Table 2. Statistics of 1D motion vectors (t ¼ 20). Thedistribution becomes narrower. The peak around zero helpsthe algorithm to converge well
Average Variance Skewness Kurtosis
V x À0.0041 5.6971 0.1003 84.030
V y À0.1391 5.1348 0.1770 36.914V 0x À0.0536 1.4255 12.647 433.48V 0 y À0.0593 2.0544 2.448 46.570
0
50
100
150
200
−30 −20 −10 0 10 20 30
N u m b e r o f p o i n t s
250
Magnitude
0
50
100
150
200
−30 −20 −10 0 10 20 30
N u m b e r o f p o i n t s
250
Magnitude
(a) (b)
Figure 7. Distribution of normal flow vectors (t ¼ 0): (a) distribution in x direction: (a) (– & –) 1D flow vectors; (– * –) afterthresholding; (b) distribution in y direction: (b) (– & –) 1D flow vectors; (– * –) after thresholding.
−25
−20
−15
−10
−5
0
0 50 100 150 200 250 300
Iterations
0 50 100 150 200 250 300
Iterations
−0.08
−0.06
−0.04
−0.020
0.02
0.04
0.06
0.08(a) (b)
Figure 8. Convergence process of affine parameters using normal flow: (a) (– * –) a3, (– & –) a6; (b) (– * –) a1, (– ̂ –) a4, (– & –) a2,(b) (– Â –) a5.
100 J. HOSHINO AND M. KOUROGI

8/7/2019 Flow Estimation
http://slidepdf.com/reader/full/flow-estimation 7/9
estimate global camera motion. Use of the normal flow
for the image mosaicing has not been presented in
previous papers. However, the comparison may beinteresting because the normal flow has been the typical
method of generating 1D flow.
Normal flow is a 1D flow along the gradient direction.
The magnitude of the normal flow is
jvnj ¼ I t= ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
I 2x þ I 2 y
q ð12Þ
Figure 9. Panoramic image mosaicing from a continuous video sequence.
−7
−6
−5
−4
−3
−2
−1
0
0 5 10 15 20 25
Iterations
−0.02
−0.01
0
0.01
0.02
0.03
0 5 10 15 20 25
Iterations
(a) (b)
Figure 10. Convergence process of affine parameters when the inter-frame motion is small. The parameters converge faster thanthe example of Figure 4: (a) (– * –) a3, (– & –) a6; (b) (– * –) a1, (– * –) a4, (– & –) a2, (b) (– Â –) a5.
Table 3. Computation time.
Affine parameter estimation 30–40 msImage gradient 10 msID flow vectors 10 msLeast-squares estimation 10 ms
Image merging 10 msTotal 40–50 ms
0
20
40
60
80
100
−30 −20 −10 0 10 20 30
Magnitude
N u m b e r o f p o i n t s
120
Figure 11. Distribution of 1D flow at different thresholds.Threshold value is not so sensitive because it maintains similardistribution characteristics: (F) no threshold; (F)th=10;(F)th=20; (??????)th=5.
FAST PANORAMIC IMAGE MOSAICING 101

8/7/2019 Flow Estimation
http://slidepdf.com/reader/full/flow-estimation 8/9
where gradient direction n is
n ¼1 ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
I 2x þ I 2 y
q ðI x; I yÞT ð13Þ
From Eqns. (12) and ( 13), x and y components of the
normal flow are given as
ðvx; v yÞ ¼ ÀI tI x
I 2x þ I 2 y
; ÀI tI y
I 2x þ I 2 y
!ð14Þ
Figures 7 and 8 show the results of the affine
parameter estimation using the normal flow. The results
show that convergence process is quite slow compared
with the 1D flows described previously. In this experi-
ment, the affine parameters did not converge even after
300 iterations.
Merging continuous video sequences
Figure 9 shows the result of panoramic image mosaicing
from continuously captured video images (80 frames).
Figure 10 shows the convergence process of affine
parameters. Table 3 shows the computational time of
the same sample. In this example, the affine parameters
converge around 10 iterations because the inter-frame
motion is much smaller compared with the example
above. The computational cost of the proposed method
is roughly O(tMN ) where t is the number of iterations
and (M ,N ) is the size of the input images. In the current
implementation, the proposed method can process l0–20
frames per second using continuously captured video
sequences (Figures 11 and 12).
Conclusion
In this paper, we proposed a fast method for panoramic
image mosaicing using 1D flow estimation. The algo-
rithm converges very well without introducing any
additional constraints. The accuracy of the image
mosaicing is comparable to the existing method even if
we use the approximate flow estimates. We also show
that the proposed method converges quickly compared
with the estimation using the normal flow. The
experimental results show that the image mosaicing is
possible from continuously captured video sequences in
near-real time. In future, we plan to extend the proposed
method to merge input images including outliers such as
moving objects.
References
1. Brown, L.G. (1992) A Survey of image registrationtechniques. ACM Computer Surveys 24: 325–376.
Figure 12. Flow distribution of the different input images. We can observe similar results for the typical input images: (a) inputimage 1; (b) input image 2; (c) flow distribution of input image 1; (d) flow distribution of input image 2.
102 J. HOSHINO AND M. KOUROGI

8/7/2019 Flow Estimation
http://slidepdf.com/reader/full/flow-estimation 9/9