fornation control of platoons of autonomous vehicles
TRANSCRIPT
Formation Control
for Platoons of
Autonomous
Vehicles
Student : Chouaieb Nemri
Supervisor : Prof. Cédric Pradalier

OUTLINE
Introduction
State of the Art
Problem statement
Suggested control solution
Simulation Results
Conclusion
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES2

INTRODUCTION
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES3

INTRODUCTION
Safety Highway Capacity
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES4
Source : http://www.toyota-global.com/innovation/intelligent_transport_systems/images/The_Future_of_Mobility.pdf

INTRODUCTION
Eco-friendly Less workforce
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES5

WHERE ARE WE NOW?Source : IHS
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES6
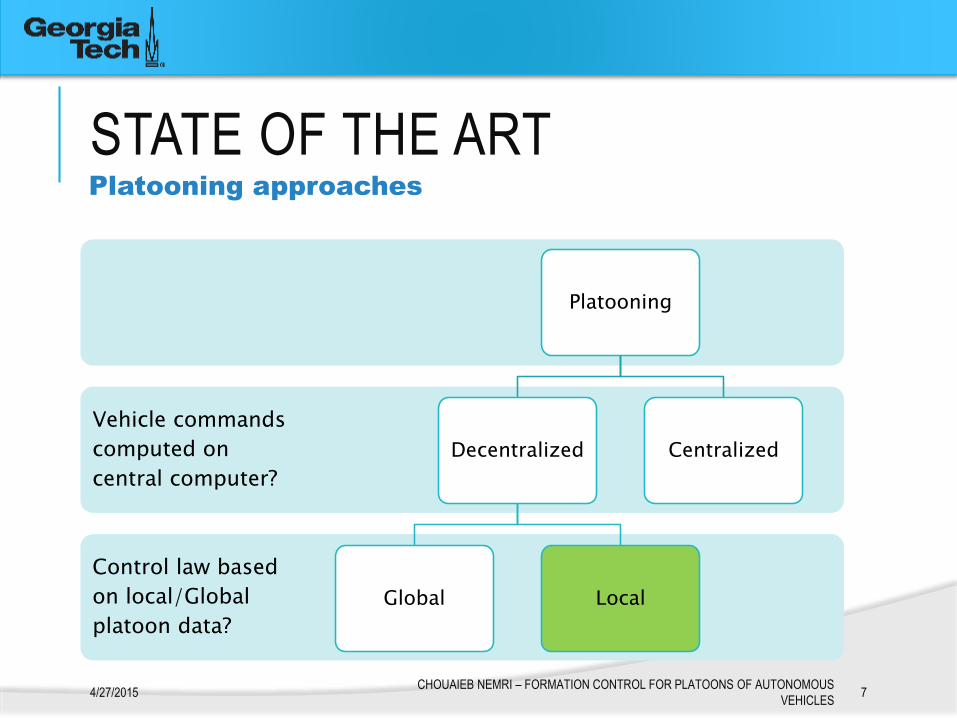
STATE OF THE ART
Control law based
on local/Global
platoon data?
Vehicle commands
computed on
central computer?
Platooning
Decentralized
Global Local
Centralized
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES7
Platooning approaches

STATE OF THE ART
Accurate tracking.
Depends on whole
convoy data.
Communication delays
– Packet Loss – Data
processing and
transmission time
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES8
Centralized & Global decentralized architectures

STATE OF THE ART
• No communication
needed
• Based exclusively on
proprioceptive and
exteroceptive sensors
• Not as accurate as
Global or Centralized
approaches
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES9
Local decentralized architectures
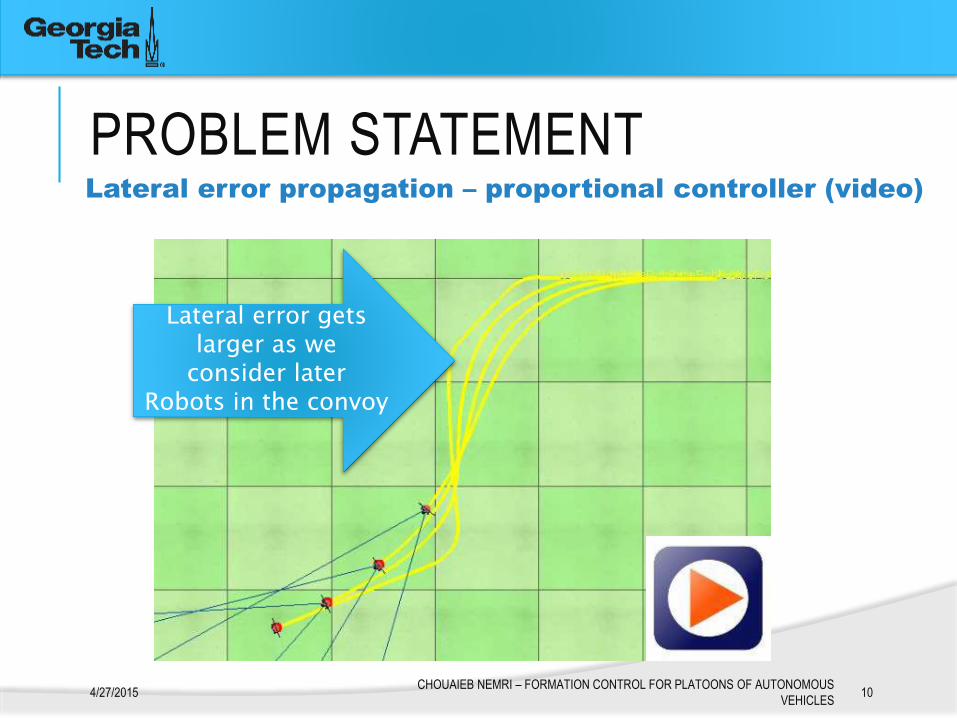
PROBLEM STATEMENT
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES10
Lateral error propagation – proportional controller (video)
Lateral error getslarger as we
consider laterRobots in the convoy

SUGGESTED CONTROL SOLUTION
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES11
© Jano Yazbeck, Alexis Scheuer and François CharpilletUniversité de Lorraine, LORIAInria, MAIA team - FRANCE
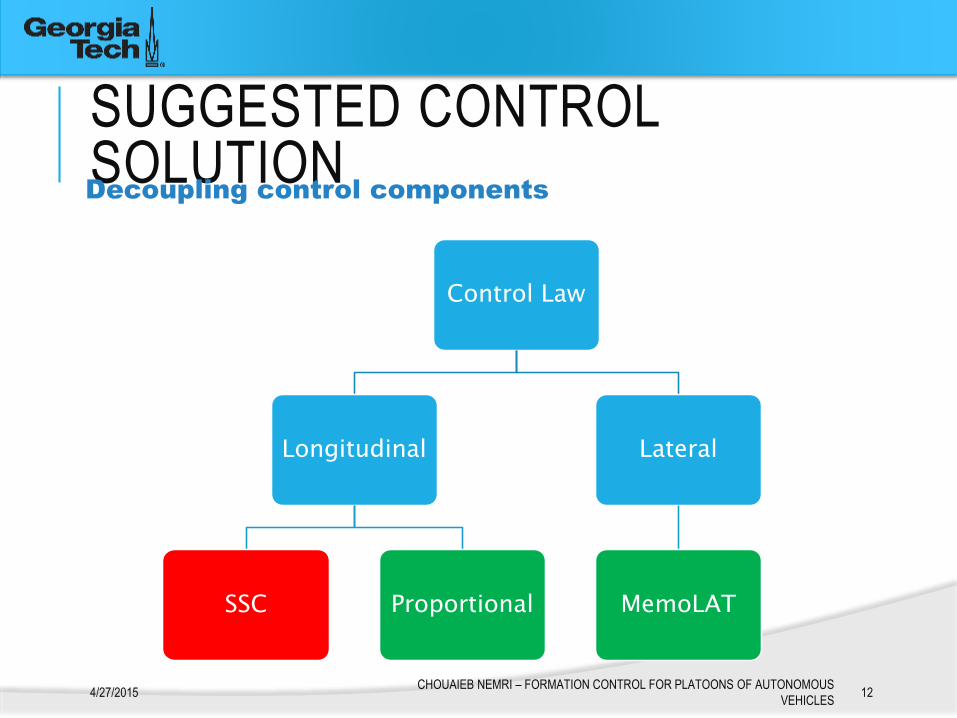
SUGGESTED CONTROL SOLUTION
Control Law
Longitudinal
SSC Proportional
Lateral
MemoLAT
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES12
Decoupling control components
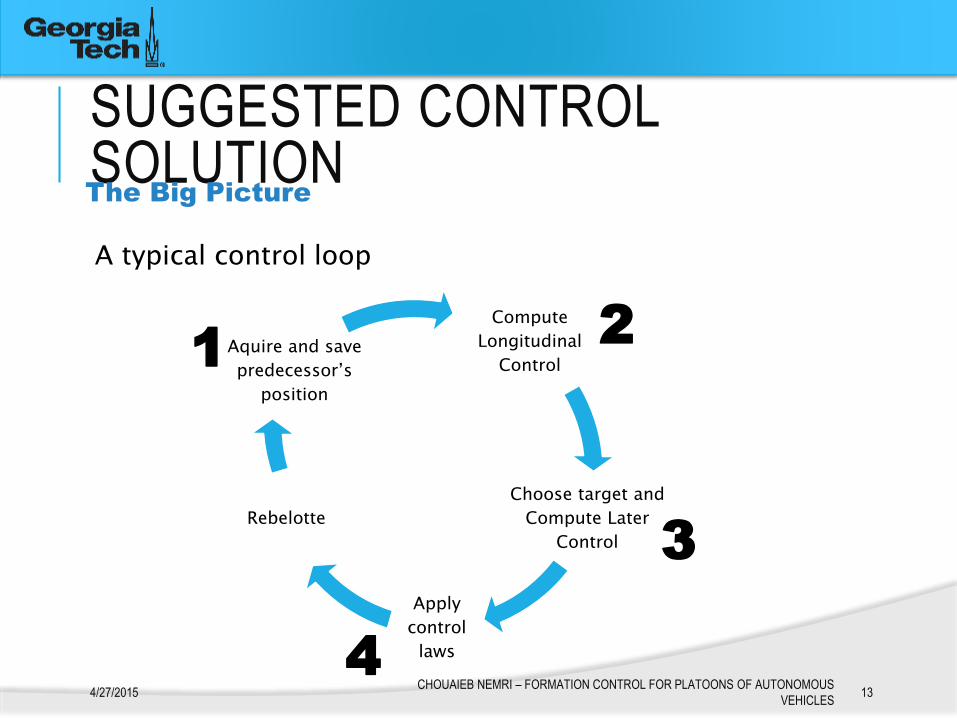
SUGGESTED CONTROL SOLUTION
A typical control loop
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES13
The Big Picture
Compute
Longitudinal
Control
Choose target and
Compute Later
Control
Apply
control
laws
Rebelotte
Aquire and save
predecessor’s
position
12
3
4

SUGGESTED CONTROL SOLUTION
Middleware : ROS indigo
Simulation software : V-REP
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES14
Used simulation environment
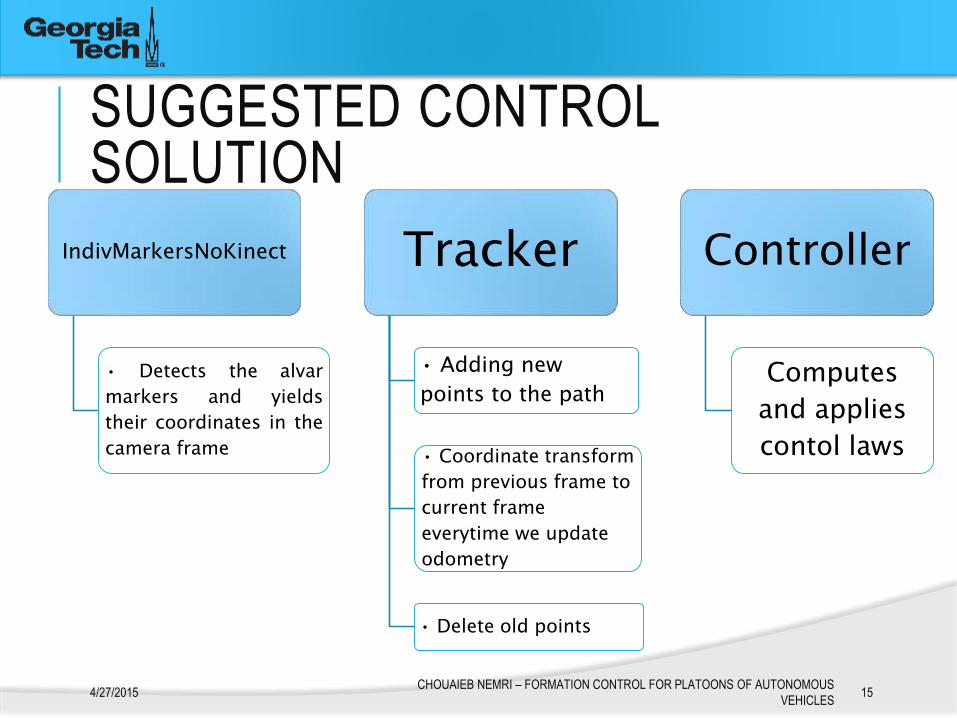
SUGGESTED CONTROL SOLUTION
IndivMarkersNoKinect
• Detects the alvar
markers and yields
their coordinates in the
camera frame
Tracker
• Adding new
points to the path
• Coordinate transform
from previous frame to
current frame
everytime we update
odometry
• Delete old points
Controller
Computes
and applies
contol laws
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES15
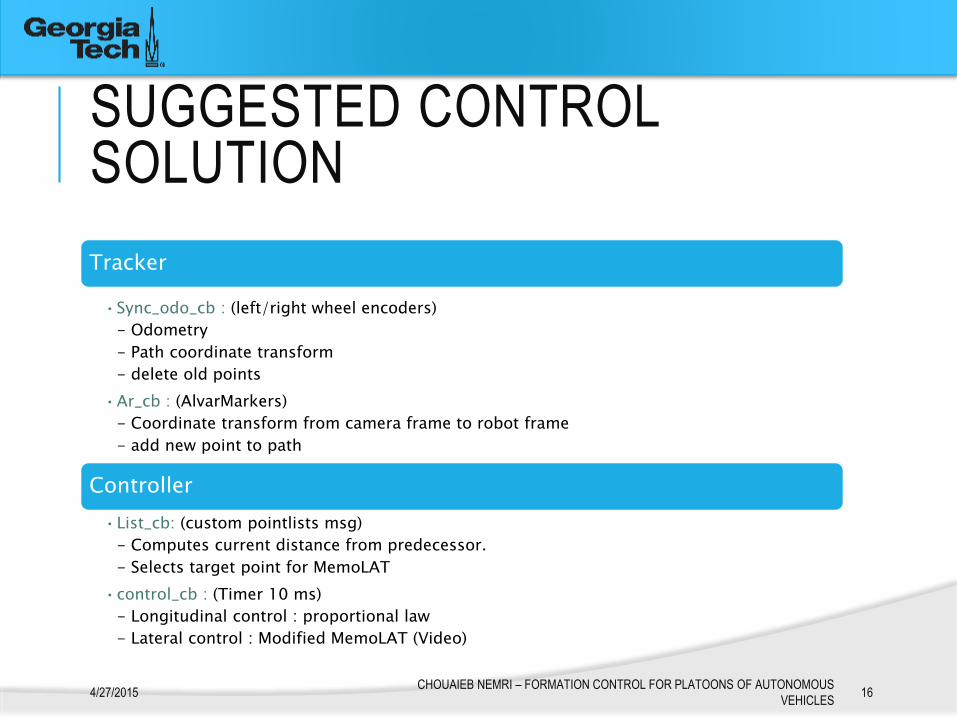
SUGGESTED CONTROL SOLUTION
Tracker
•Sync_odo_cb : (left/right wheel encoders)
- Odometry
- Path coordinate transform
- delete old points
•Ar_cb : (AlvarMarkers)
- Coordinate transform from camera frame to robot frame
- add new point to path
Controller
•List_cb: (custom pointlists msg)
- Computes current distance from predecessor.
- Selects target point for MemoLAT
•control_cb : (Timer 10 ms)
- Longitudinal control : proportional law
- Lateral control : Modified MemoLAT (Video)
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES16
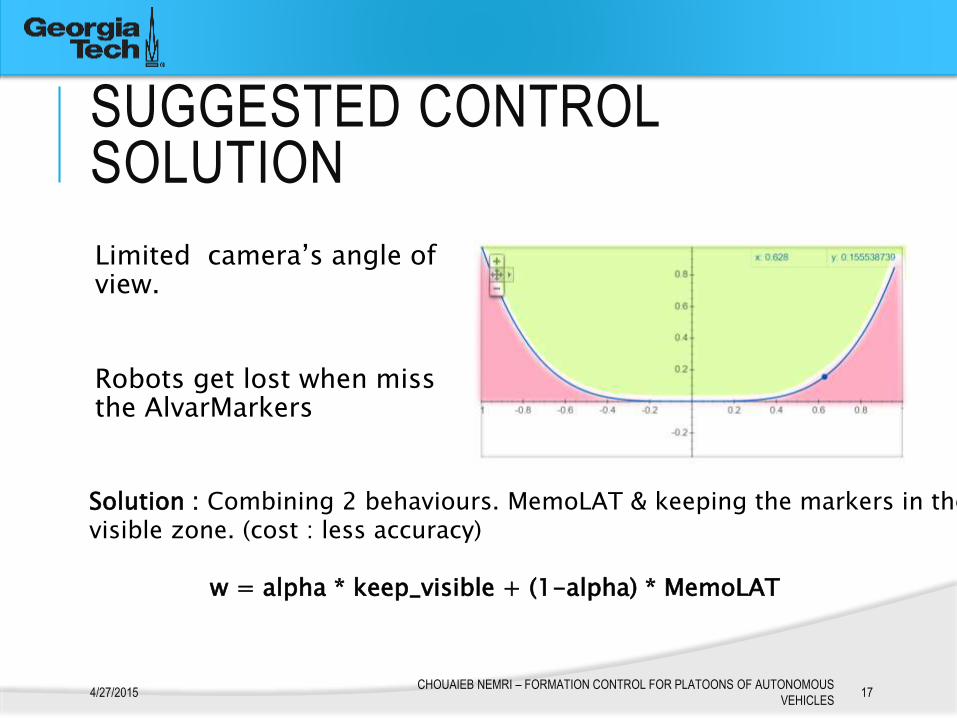
SUGGESTED CONTROL SOLUTION
Limited camera’s angle of view.
Robots get lost when miss the AlvarMarkers
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES17
Solution : Combining 2 behaviours. MemoLAT & keeping the markers in the visible zone. (cost : less accuracy)
w = alpha * keep_visible + (1-alpha) * MemoLAT

SIMULATION RESULTS
Improved accuracy (Videos)
Angular error as a function of time
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES18
SIMULATION RESULTS
Small d_l
• Small lateral
deviation.
• BUT creates
oscillation around
small curvature
paths
Large d_l
• Large lateral
deviation for high
curvature paths
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES19
Effect of establishment distance
We have no analytic relation in order to dynamically set a suitable value for
CONCLUSION
Platooning is awesome !
Lateral and longitudinal controls can be decoupled
We suggested a high level controller. It is applicable to all kind of mobile robots
Experimantal trials, setting dynamically the establishment distance…
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES20
THANK YOU.
4/27/2015CHOUAIEB NEMRI – FORMATION CONTROL FOR PLATOONS OF AUTONOMOUS
VEHICLES21
Questions ?