foucault's pendulum in the distributed control lab · foucault's pendulum in the...
TRANSCRIPT

Foucault's Pendulum in the Distributed Control Lab
WORDS 2003F Capri Island - ItalyAndreas Rasche, Peter Tröger, Michael Dirska and Andreas Polze

2
Outline
l Motivationl The Distributed Control Lab (DCL) Architecturel Foucault's Pendulum Detailsl Dynamic Reconfiguration as safe-guard
mechanisml Evaluation of the approachl Experiments in the DCLl Conclusions

3
Motivation
l Online access to physical experiments over the Web
l Test-bed for interconnected middleware-components and embedded systems
l Reach a predictable system behaviour in unstable environments
l Study techniques to prevent malicious code damaging physical equipment
l Foucault's Pendulum demonstrates usage of dynamic reconfiguration for online replacement of user control

4
Distributed Control Lab
l 2001 project start at Hasso-Plattner-Institutel Practice of writing control algorithms for real-time
control problemsl study of system predictability, availability and security in
context of middleware-based dynamic control systems l Extensible architecture for hosting physical control
experimentsl Investigation of algorithms for user code observation
and replacement of control componentsl Experiment : physical installation and specific control
software

5
The Distributed Control Lab

6

7
Problem : Malicous Code
l Investigation of Solution for malicious code detection– Source Code Analysis– Language limitations / special compiler– Simulation before execution on physical experiment– Analytic Redundancy
l Online observation of user programsl Replacement of user programs before reach of
uncontrollable statel Dynamic Reconfiguration of component-based control
applicationl Monitoring of environmental settings and component states
8
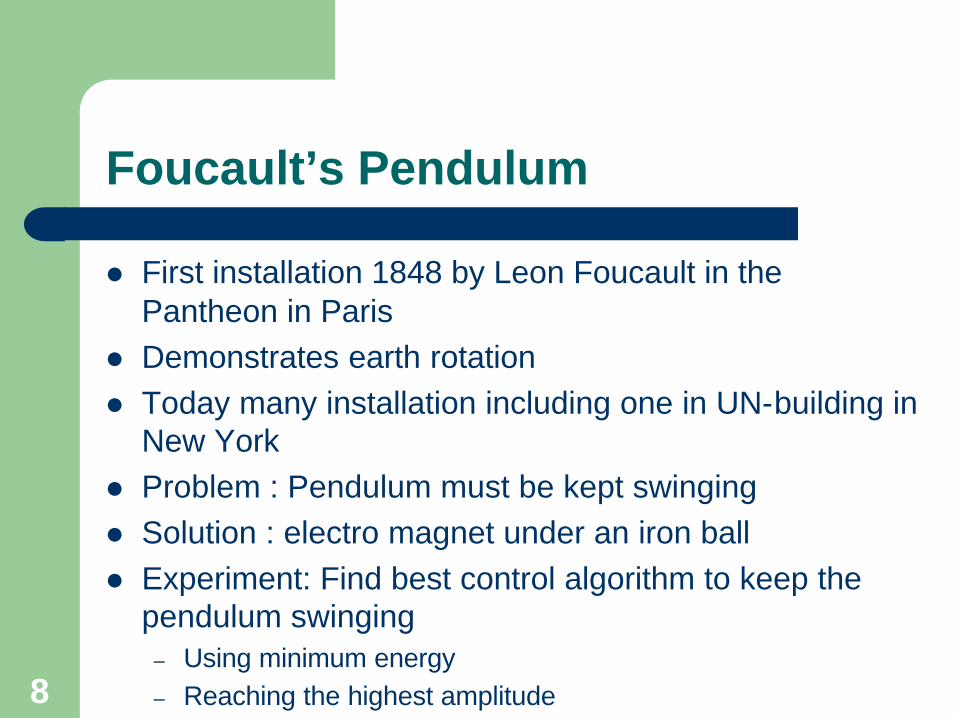
Foucault’s Pendulum
l First installation 1848 by Leon Foucault in the Pantheon in Paris
l Demonstrates earth rotationl Today many installation including one in UN-building in
New York l Problem : Pendulum must be kept swingingl Solution : electro magnet under an iron ball l Experiment: Find best control algorithm to keep the
pendulum swinging– Using minimum energy – Reaching the highest amplitude

9

10

11

12
USB Host-Controller
User-Controller
Safety-Controller
EventDuplication
Operating System I/OCheck HalfFull Flag
ConfigurationManager
Binary Reader / Filter, Smooth
Event Creation
Binary Writer
Binary Stream Generation
User Mode
Kernel Mode
Cypress EZ-USB
Read
Write
64 Byte
I/O request packetLight Sensor
Electro Magnet
FIFO-Memory 4 KBytes
ReadFile() WriteFile()
Pendulum Control – detailed
• Laser light barriers sampled into 4KByte FIFO-memorys with 23,4 kHz
• USB-Controller checks half-full-Flag
• 64 Byte blocks of data transferred via USB 1.1
• Real-Time OS-Threads process in-coming signals / produce out-going bit stream

13
Our Approach : Dynamic Reconfiguration as safe-guard mechanism
l Mapping of profiles to application configurations based on environmental conditions and component states
l Xml-based description of– observer : monitoring of environmental settings and component states – profiles : mapping of environmental conditions to application configurations– configurations of component-based applications
l Online monitoring of environment and componentsl Change of application configuration using dynamic
reconfiguration if requiredl Configuration Manager instantiates, sets attributes,
connects and starts components – performs reconfigurationl Dynamic reconfiguration based on XML-based configuration
description using an algorithm of M.Wermelinger– Based on blocking of connections between components
14
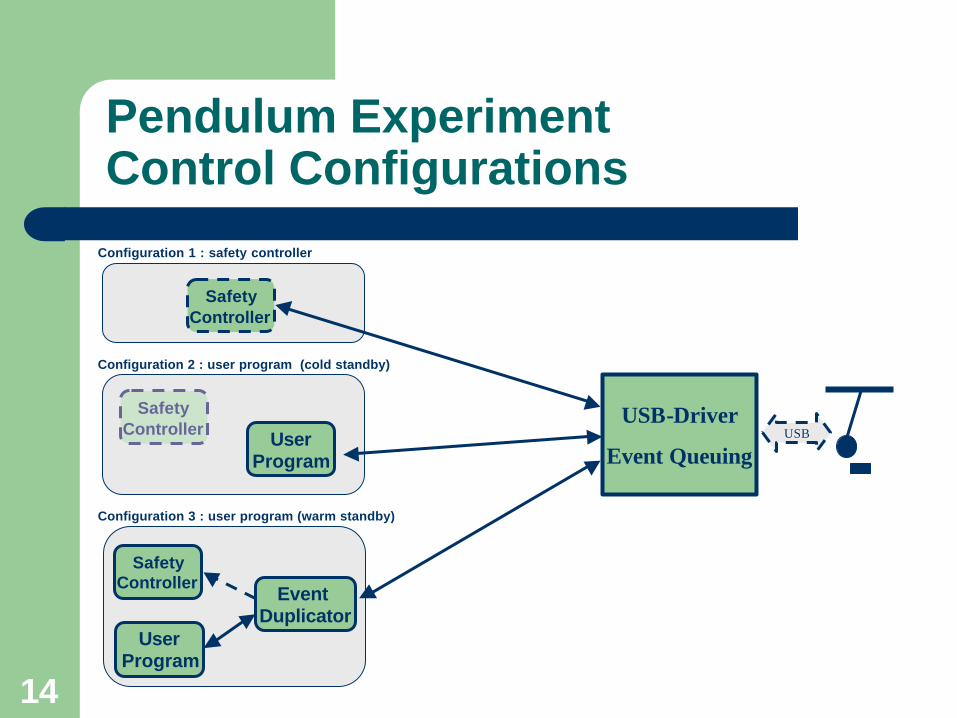
Pendulum Experiment Control Configurations
USB-Driver
Event Queuing
SafetyController
UserProgram
Event Duplicator
UserProgram
Configuration 1 : safety controller
Configuration 2 : user program (cold standby)
Configuration 3 : user program (warm standby)
USB
SafetyController
SafetyController
15
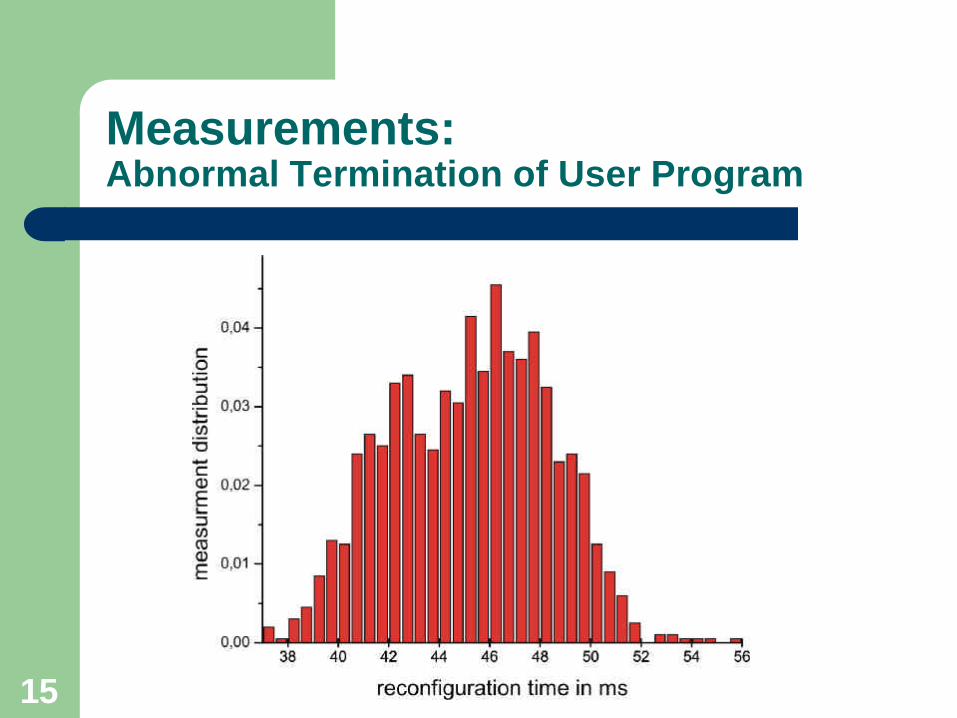
Measurements:Abnormal Termination of User Program

16
Future Work
l “Higher Striker” – Real Time Control Experiment– Running on a RTOS (Ce.Net, eCos)– Small buffers possible / short delay – Parallel Port I/O– Sampling rate 38 kHz
l Port of .Net Environment (parts) to Lego-Robotsl Additional experiments / simulations

17
Related Work
l “Verbund Virtuelles Labor” project at UniversityReutlingen / Germany
l iLab project (WebLab) at MIT l Virtual Lab at University of Hagen /Germanyl Tele-Laboratory at University of Pisal Tele-Lab / Simplex architecture

18
Conclusions
l DCL : environment for remote experiment access based on COTS Operating System and Middleware
l Safety against malicious code demonstratedl Analytic Redundancy / Runtime observation of
user control at Foucault‘s Pendulum applicablel Replacement of faulty control algorithms using
dynamic reconfigurationl Measured reconfiguration times highly
acceptable for control applications