freeway capacity in a connected/automated mixed traffic environment presentations... ·...
TRANSCRIPT

Freeway Capacity in a
Connected/Automated Mixed
Traffic Environment
Sarah El-Dabaja1, Bhaven Naik2, Deborah McAvoy3
1Ph.D. Candidate, Ohio University, 037 Stocker Center, 1 Ohio University, Athens, OH, 45701, Email: [email protected] Professor, Ohio University, 226 Stocker Center, 1 Ohio University, Athens, OH 45701, Email: [email protected]
3Associate Professor, Ohio University, 122 Stocker Center, 1 Ohio University, Athens, OH 45701, Email: [email protected]
Discussion Topics
• The Move Towards CACC
• CACC and Freeway Capacity
• Research Objectives
• Proposed Methodology
• Anticipated Results and Implications

The Problem: Congestion
6.9 billion hours lost1
3.1 billion gallons of fuel wasted1
$160 billion spent1
1Schrank, D., Eisele, B., Lomax, T, & Bak, J. (2015). TTI’s 2015 Urban Mobility Scorecard. College Station, TX: Texas Transportation Institute, A&M University.
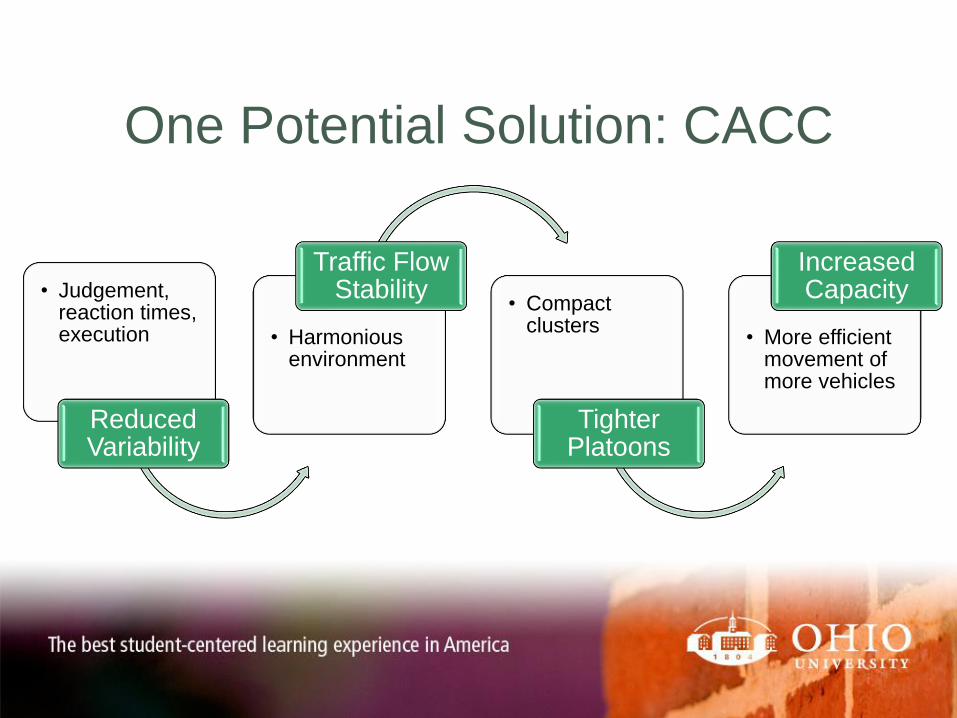
• Judgement, reaction times, execution
Reduced Variability
• Harmonious environment
Traffic Flow Stability
• Compact clusters
Tighter Platoons
• More efficient movement of more vehicles
Increased Capacity
One Potential Solution: CACC
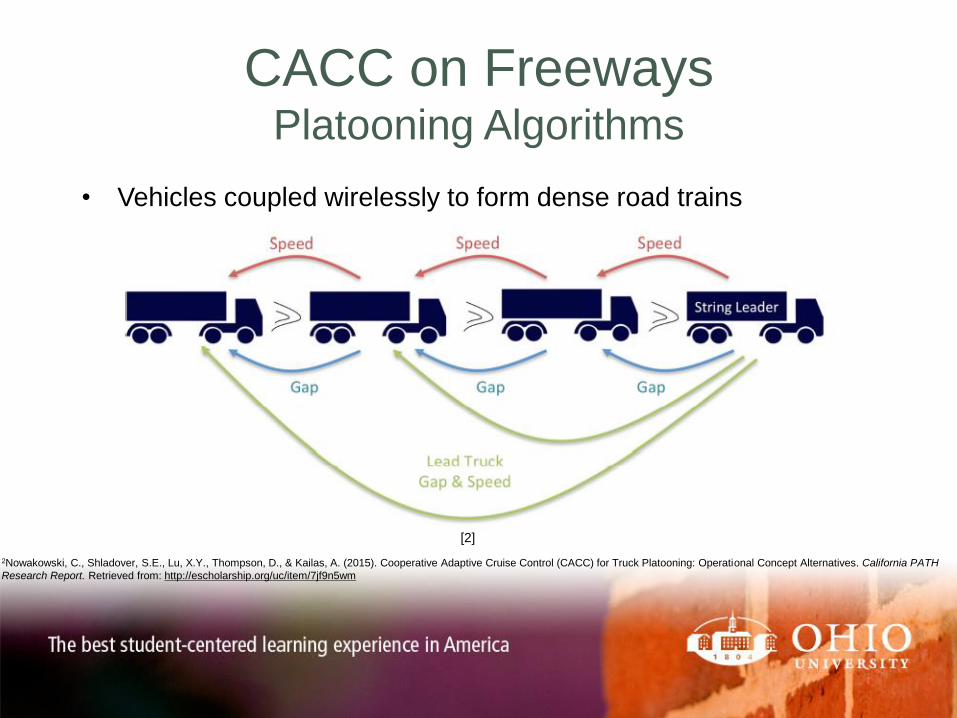
CACC on FreewaysPlatooning Algorithms
• Vehicles coupled wirelessly to form dense road trains
2Nowakowski, C., Shladover, S.E., Lu, X.Y., Thompson, D., & Kailas, A. (2015). Cooperative Adaptive Cruise Control (CACC) for Truck Platooning: Operational Concept Alternatives. California PATH
Research Report. Retrieved from: http://escholarship.org/uc/item/7jf9n5wm
[2]

CACC on FreewaysPlatooning Algorithms
• Relies on some form of gap regulation
• Enhances capacity through string stability and shorter headways4
3Amoozadeh, M., Deng, H., Chuah, C.N., Zhang, H.M, & Ghosal, D. (2015). Platoon management with cooperative adaptive cruise control enabled by VANET. Vehicular Communications, 2.
http://dx.doi.org/10.1016/j.vehcom.2015.03.004
[3]

CACC on FreewaysMerging Algorithms
• Encourages gap creation for smooth transitions and easy
accelerations and decelerations
[5]
5Scarinci, R., & Heydecker, B. (2014). Control Concepts for Facilitating Motorway On-ramp Merging using Intelligent Vehicles. Transport Reviews, 34(6), 775-797. doi:
10.1080/01441647.2014.983210
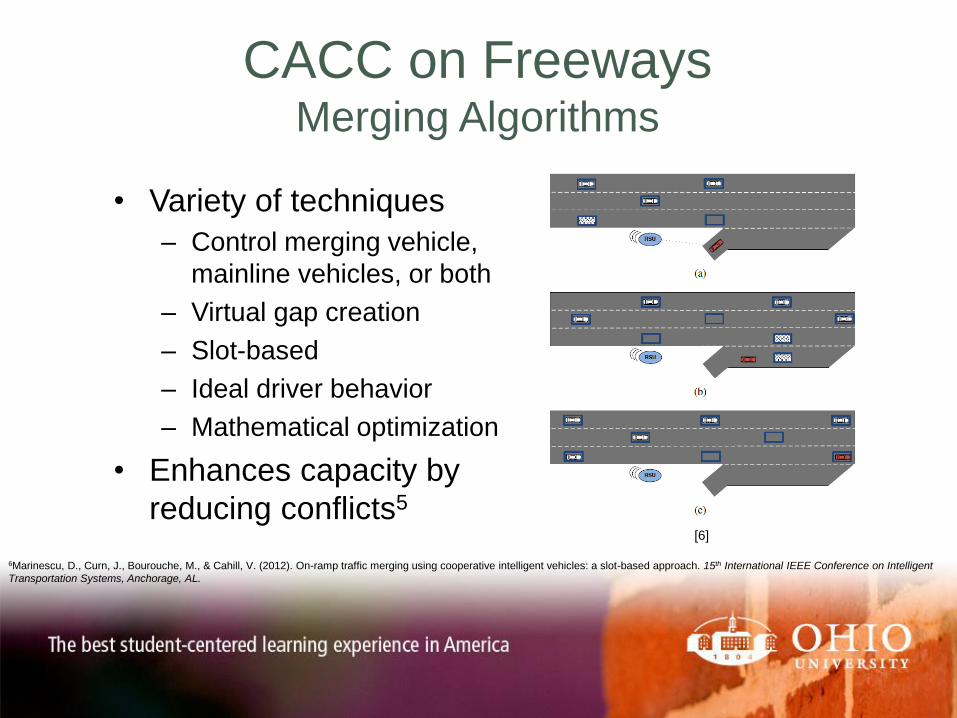
CACC on FreewaysMerging Algorithms
• Variety of techniques
– Control merging vehicle,
mainline vehicles, or both
– Virtual gap creation
– Slot-based
– Ideal driver behavior
– Mathematical optimization
• Enhances capacity by
reducing conflicts5
[6]
6Marinescu, D., Curn, J., Bourouche, M., & Cahill, V. (2012). On-ramp traffic merging using cooperative intelligent vehicles: a slot-based approach. 15th International IEEE Conference on Intelligent
Transportation Systems, Anchorage, AL.
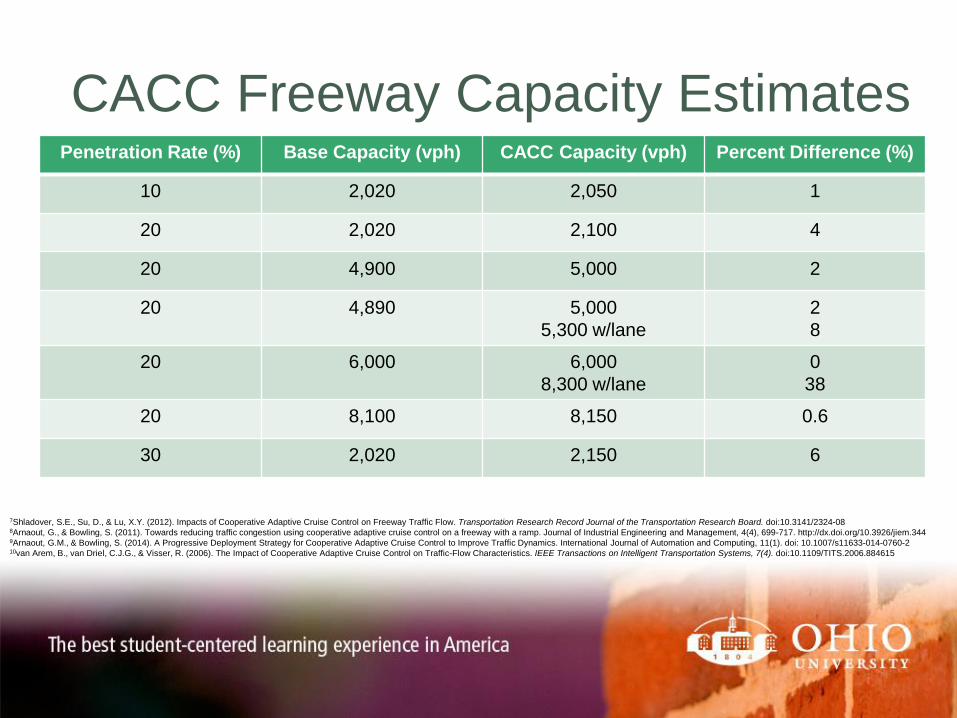
CACC Freeway Capacity EstimatesPenetration Rate (%) Base Capacity (vph) CACC Capacity (vph) Percent Difference (%)
10 2,020 2,050 1
20 2,020 2,100 4
20 4,900 5,000 2
20 4,890 5,000
5,300 w/lane
2
8
20 6,000 6,000
8,300 w/lane
0
38
20 8,100 8,150 0.6
30 2,020 2,150 6
7Shladover, S.E., Su, D., & Lu, X.Y. (2012). Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow. Transportation Research Record Journal of the Transportation Research Board. doi:10.3141/2324-088Arnaout, G., & Bowling, S. (2011). Towards reducing traffic congestion using cooperative adaptive cruise control on a freeway with a ramp. Journal of Industrial Engineering and Management, 4(4), 699-717. http://dx.doi.org/10.3926/jiem.3449Arnaout, G.M., & Bowling, S. (2014). A Progressive Deployment Strategy for Cooperative Adaptive Cruise Control to Improve Traffic Dynamics. International Journal of Automation and Computing, 11(1). doi: 10.1007/s11633-014-0760-210van Arem, B., van Driel, C.J.G., & Visser, R. (2006). The Impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics. IEEE Transactions on Intelligent Transportation Systems, 7(4). doi:10.1109/TITS.2006.884615
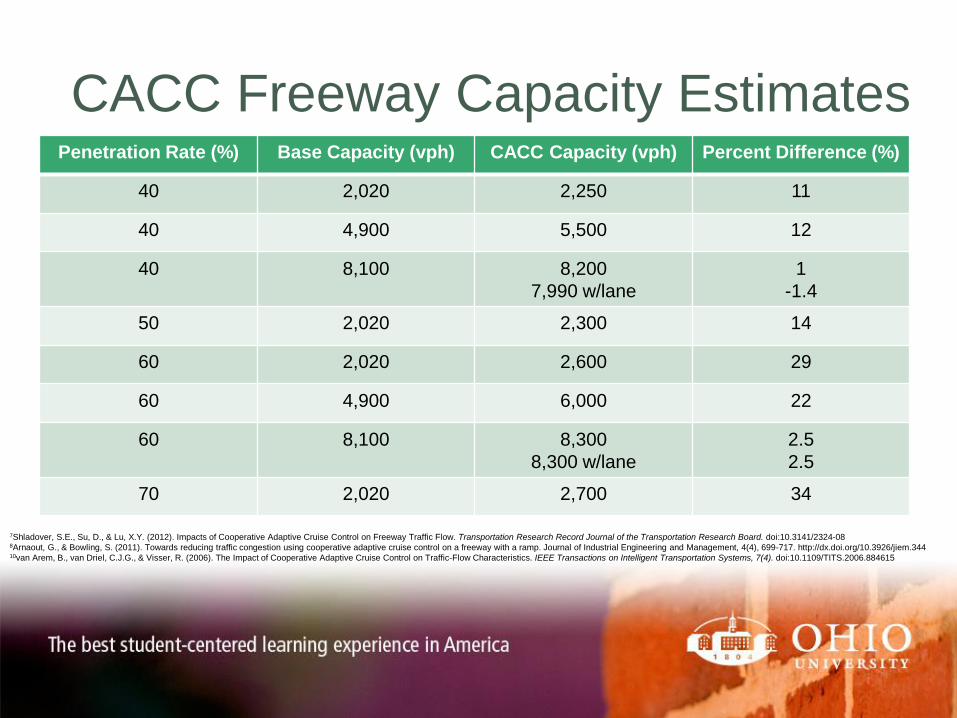
CACC Freeway Capacity EstimatesPenetration Rate (%) Base Capacity (vph) CACC Capacity (vph) Percent Difference (%)
40 2,020 2,250 11
40 4,900 5,500 12
40 8,100 8,200
7,990 w/lane
1
-1.4
50 2,020 2,300 14
60 2,020 2,600 29
60 4,900 6,000 22
60 8,100 8,300
8,300 w/lane
2.5
2.5
70 2,020 2,700 34
7Shladover, S.E., Su, D., & Lu, X.Y. (2012). Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow. Transportation Research Record Journal of the Transportation Research Board. doi:10.3141/2324-088Arnaout, G., & Bowling, S. (2011). Towards reducing traffic congestion using cooperative adaptive cruise control on a freeway with a ramp. Journal of Industrial Engineering and Management, 4(4), 699-717. http://dx.doi.org/10.3926/jiem.34410van Arem, B., van Driel, C.J.G., & Visser, R. (2006). The Impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics. IEEE Transactions on Intelligent Transportation Systems, 7(4). doi:10.1109/TITS.2006.884615

CACC Freeway Capacity EstimatesPenetration Rate (%) Base Capacity (vph) CACC Capacity (vph) Percent Difference (%)
80 2,020 2,900 44
80 4,900 7,450 52
80 8,100 8,300
8,100
2.5
0
90 2,020 3,300 63
100 600 3,250 442
100 1,540 1,880 22
100 2,020 4,000 98
100 8,100 8,300 2.5
100 4,900 7,800 59
6Marinescu, D., Curn, J., Bourouche, M., & Cahill, V. (2012). On-ramp traffic merging using cooperative intelligent vehicles: a slot-based approach.15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AL.7Shladover, S.E., Su, D., & Lu, X.Y. (2012). Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow. Transportation Research Record Journal of the Transportation Research Board. doi:10.3141/2324-088Arnaout, G., & Bowling, S. (2011). Towards reducing traffic congestion using cooperative adaptive cruise control on a freeway with a ramp. Journal of Industrial Engineering and Management, 4(4), 699-717. http://dx.doi.org/10.3926/jiem.34410van Arem, B., van Driel, C.J.G., & Visser, R. (2006). The Impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics. IEEE Transactions on Intelligent Transportation Systems, 7(4). doi:10.1109/TITS.2006.88461511Xie, Y., Zhang, H., Gartner, N., & Arsava, T. (2014). Collaborative Merging Behaviors and Their Impacts on Freeway Ramp Operations under Connected Vehicle Environment. Symposium Celebration 50 Years of Traffic Flow Theory, Portland, OR.

Problems with Current Estimates
• Major discrepancies in estimates
• Inconsistencies in methodology
– No single approach for practitioners to apply like HCM
• Uncertainties related to manual driver behavior in a
mixed traffic environment
– What headway will drivers choose?
– Will reaction times be affected?
Research Objectives
• Investigate manual driver behavior in a mixed
traffic environment under varying penetration rates
• Derive traffic flow parameters that are statistically
significant and generalizable:
– PRTs
– Headways
– PCEs of CACC vehicles (passenger cars, heavy trucks,
buses, RVs)
• Develop new freeway capacity analysis method in
consideration of varying penetration rates

Proposed Methodology
Phase I: Driving Simulation
Phase II: Microsimulation
Phase III: Synthesis of Results into Capacity Analysis Method
Phase I – Driving Simulation
• Purpose: To obtain critical values of PRTs and
headways for manual vehicles
• DriveSafety driving simulator
• Research Tasks:
– Develop freeway driving scenarios
– Recruit participants
– Collect and analyze data
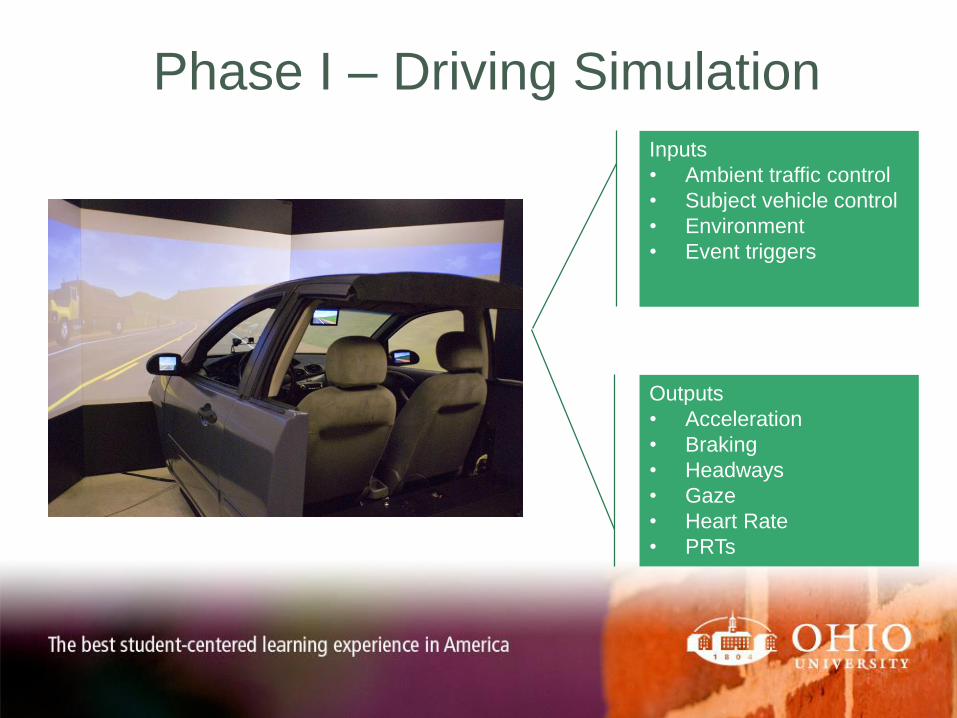
Phase I – Driving Simulation
Inputs
• Ambient traffic control
• Subject vehicle control
• Environment
• Event triggers
Outputs
• Acceleration
• Braking
• Headways
• Gaze
• Heart Rate
• PRTs

Driver Behavior Research in Progress
• Driver reaction to failure of fully autonomous system
Parameter Immediate Response Long-Term Response
Lane Position Lane departure More oscillation, lane
departures
Steering “Jerky” right to left Less controlled
Velocity Decreases approximately
10-15 mph
±10-25 mph deviations
from speed limit
Acceleration Drops, then fully depressed Harder accelerations
Braking Not applied Harder braking
Phase II - Microsimulation
• Purpose: To observe impacts of new traffic parameter
values on flow and capacity
• VISSIM package
• Research Tasks:
– Develop model calibrated with driving simulator data
– Conduct sensitivity analysis of capacity impacts related to
CACC penetration rates

Phase III – Synthesis of Results
into Capacity Analysis Method
• Purpose: To develop uniform and applicable methods
for calculating freeway capacity estimates with CACC
• Research Tasks:
– Statistical modeling to develop analysis techniques similar to
HCM methods
Anticipated Results and Implications
• Phase I
– PRTs, headways, and PCEs corresponding to penetration rates
– Replace subjective assumptions with substantive empirical values
• Phase II
– Fully calibrated microsimulation model
– Analysis of CACC algorithms (e.g., platooning, merging)
• Phase III
– Freeway capacity analysis methods for mixed traffic environment
– Consistent estimates of freeway capacity with CACC

Questions?
Thank you!
References1Schrank, D., Eisele, B., Lomax, T, & Bak, J. (2015). TTI’s 2015 Urban Mobility Scorecard. College Station, TX: Texas Transportation Institute,
A&M University. 2Nowakowski, C., Shladover, S.E., Lu, X.Y., Thompson, D., & Kailas, A. (2015). Cooperative Adaptive Cruise Control (CACC) for Truck
Platooning: Operational Concept Alternatives. California PATH Research Report. Retrieved from: http://escholarship.org/uc/item/7jf9n5wm3Amoozadeh, M., Deng, H., Chuah, C.N., Zhang, H.M, & Ghosal, D. (2015). Platoon management with cooperative adaptive cruise control enabled
by VANET. Vehicular Communications, 2. http://dx.doi.org/10.1016/j.vehcom.2015.03.0044Milanes, V., Shladover, S.E., Spring, J., Nowakowski, C., Kawazoe, H., & Nakamura, M. (2014). Cooperative Adaptive Cruise Control in Real
Traffic Situations. IEEE Transactions on Intelligent Transportation Systems, 15(1). doi:10.1109/TITS.2013.22784945Scarinci, R., & Heydecker, B. (2014). Control Concepts for Facilitating Motorway On-ramp Merging using Intelligent Vehicles. Transport Reviews,
34(6), 775-797. doi: 10.1080/01441647.2014.9832106Marinescu, D., Curn, J., Bourouche, M., & Cahill, V. (2012). On-ramp traffic merging using cooperative intelligent vehicles: a slot-based approach.
15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AL.7Shladover, S.E., Su, D., & Lu, X.Y. (2012). Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow. Transportation Research
Record Journal of the Transportation Research Board. doi:10.3141/2324-088Arnaout, G., & Bowling, S. (2011). Towards reducing traffic congestion using cooperative adaptive cruise control on a freeway with a ramp.
Journal of Industrial Engineering and Management, 4(4), 699-717. http://dx.doi.org/10.3926/jiem.3449Arnaout, G.M., & Bowling, S. (2014). A Progressive Deployment Strategy for Cooperative Adaptive Cruise Control to Improve Traffic Dynamics.
International Journal of Automation and Computing, 11(1). doi: 10.1007/s11633-014-0760-210van Arem, B., van Driel, C.J.G., & Visser, R. (2006). The Impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics. IEEE
Transactions on Intelligent Transportation Systems, 7(4). doi:10.1109/TITS.2006.88461511Xie, Y., Zhang, H., Gartner, N., & Arsava, T. (2014). Collaborative Merging Behaviors and Their Impacts on Freeway Ramp Operations under
Connected Vehicle Environment. Symposium Celebration 50 Years of Traffic Flow Theory, Portland, OR.

Photo Creditshttp://www.usatoday.com/story/news/nation/2014/06/04/worst-traffic-cities/9926213/
http://careerconfidential.com/i-wasted-time-job-boards/
http://www.alexsworld.co/what-does-the-nd-mean-for-me/
http://www.aopa.org/Pilot-Resources/Aircraft-Ownership/The-Pilots-Guide-to-Taxes
http://www.ohio.edu/research/communications/driving_simulation.cfm