from and/or search to and/or bdds
DESCRIPTION
From AND/OR Search to AND/OR BDDs. Rina Dechter Information and Computer Science, UC-Irvine, and Radcliffe Institue of Advanced Study, Cambridge. Joint work with Robert Mateescu and John Cobb. A. B. B. A. C. C. C. C. B. B. D. D. D. D. D. D. D. D. E. E. G. G. E. E. E. - PowerPoint PPT PresentationTRANSCRIPT

Verification/constraints
workshop, 2006
From AND/OR Search to AND/OR BDDs
Rina Dechter
Information and Computer Science, UC-Irvine, and
Radcliffe Institue of Advanced Study, Cambridge
Joint work with Robert Mateescu and John Cobb

Combining Decision Diagrams
f = A*E + B*F g = C*G +D*H
B
A
F
0 1
E
B
E
D
C
H
0 1
G
D
G
B
A
C
D D
C
B
D D
C
D D
0 1
H
G G
F F F
EE E E E E
OBDD f * g =

Combining AND/OR BDDsf = A*E + B*F g = C*G +D*H
B
A
F
0 1
E
B
E
D
C
H
0 1
G
D
G
AOBDD f * g =
B
A
F
0 1
E
B
E
D
C
H
0 1
G
D
G
AND

OBDDs vs AOBDD f * g =
B
A
F
0 1
E
B
E
D
C
H
0 1
G
D
G
AND
B
A
C
D D
C
B
D D
C
D D
0 1
H
G G
F F F
EE E E E E
AOBDD
OBDD

Outline
Background in Graphical models AND/OR search trees and Graphs Minimal AND/OR graphs From AND/OR graphs to AOMDDs Compilation of AOMDDs AOMDDs and earlier BDDs

A Bred greenred yellowgreen redgreen yellowyellow greenyellow red
Example: map coloring Variables - countries (A,B,C,etc.)
Values - colors (red, green, blue)
Constraints: etc. ,ED D, AB,A
C
A
B
DE
F
G
A
Constraint Networks
A
B
E
G
DF
C
Constraint graph
Semantics: set of all solutionsPrimary task: find a solution

= {(¬C), (A v B v C), (¬A v B v E), (¬B v C v D)}.
Propositional Satisfiability

A graphical model (X,D,C): X = {X1,…Xn} variables D = {D1, … Dn} domains C = {F1,…,Ft} functions
(constraints, CPTS, cnfs)
Graphical models
CAFF
CAFPF
i
i
:
),|(:
A
D
B C
E
F
All these tasks are NP-hard identify special cases approximate
Examples:
•Constraint networks•Belief networks•Cost networks•Markov random fields•Influence diagrams

Tree-solving is easy
Belief updating (sum-prod)
MPE (max-prod)
CSP – consistency (projection-join)
#CSP (sum-prod)
P(X)
P(Y|X) P(Z|X)
P(T|Y) P(R|Y) P(L|Z) P(M|Z)
)(XmZX
)(XmXZ
)(ZmZM)(ZmZL
)(ZmMZ)(ZmLZ
)(XmYX
)(XmXY
)(YmTY
)(YmYT
)(YmRY
)(YmYR
Trees are processed in linear time and memory

Transforming into a Tree
By Inference (thinking) Transform into a single, equivalent
tree of sub-problems
By Conditioning (guessing) Transform into many tree-like sub-
problems.

Inference and Treewidth
EK
F
L
H
C
BA
M
G
J
D
ABC
BDEF
DGF
EFH
FHK
HJ KLM
treewidth = 4 - 1 = 3treewidth = (maximum cluster size) - 1
Inference algorithm:Time: exp(tree-width)Space: exp(tree-width)

Conditioning and Cycle cutset
C P
J A
L
B
E
DF M
O
H
K
G N
C P
J
L
B
E
DF M
O
H
K
G N
A
C P
J
L
E
DF M
O
H
K
G N
B
P
J
L
E
DF M
O
H
K
G N
C
Cycle cutset = {A,B,C}
C P
J A
L
B
E
DF M
O
H
K
G N
C P
J
L
B
E
DF M
O
H
K
G N
C P
J
L
E
DF M
O
H
K
G N
C P
J A
L
B
E
DF M
O
H
K
G N

Search over the Cutset
A=yellow A=green
• Inference may require too much memory
• Condition (guessing) on some of the variables
C
B K
G
L
D
FH
M
J
E
C
B K
G
L
D
FH
M
J
E
AC
B K
G
L
D
FH
M
J
E
GraphColoringproblem

Search over the Cutset (cont)
A=yellow A=green
B=red B=blue B=red B=blueB=green B=yellow
C
K
G
L
D
FH
M
J
E
C
K
G
L
D
FH
M
J
E
C
K
G
L
D
FH
M
J
E
C
K
G
L
D
FH
M
J
E
C
K
G
L
D
FH
M
J
E
C
K
G
L
D
FH
M
J
E
• Inference may require too much memory
• Condition on some of the variablesA
C
B K
G
L
D
FH
M
J
E
GraphColoringproblem

Inference vs. Conditioning
By Inference (thinking)
E K
F
L
H
C
BA
M
G
J
DABC
BDEF
DGF
EFH
FHK
HJ KLM
By Conditioning (guessing)
Exponential in treewidth
Time and memory
Exponential in cycle-cutsetTime-wise, linear memory
A=yellow A=green
B=blue B=red B=blueB=green
CK
G
LD
F H
M
J
EACB K
G
LD
F H
M
J
E
CK
G
LD
F H
M
J
EC
K
G
LD
F H
M
J
EC
K
G
LD
F H
M
J
E
Variable-eliminationDirectional resolutionJoin-tree clustering
BacktrackingBranch and boundDepth-first search

Outline
Background in Graphical models AND/OR search trees and Graphs Minimal AND/OR graphs From AND/OR graphs to AOMDDs Compilation of AOMDDs AOMDDs and earlier BDDs

Classic OR Search Space
0 1 0 1 0 1 0 1
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0 1 0 1
E
C
F
D
B
A 0 1
Ordering: A B E C Ordering: A B E C D FD F
A
D
B C
E
F

AND/OR Search Space
AOR
0AND 1
BOR B
0AND 1 0 1
EOR C E C E C E C
OR D F D F D F D F D F D F D F D F
AND 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
AND 0 10 1 0 10 1 0 10 1 0 10 1
A
D
B C
E
F
A
D
B
CE
F
Primal graph DFS tree
A
D
B C
E
F
A
D
B C
E
F

AND/OR vs. ORAOR
0AND 1
BOR B
0AND 1 0 1
EOR C E C E C E C
OR D F D F D F D F D F D F D F D F
AND 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
AND 0 10 1 0 10 1 0 10 1 0 10 1
E 0 1 0 1 0 1 0 1
0C 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
F 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
D 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0B 1 0 1
A 0 1
E 0 1 0 1 0 1 0 1
0C 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
F 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
D 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0B 1 0 1
A 0 1
AND/OR
OR
A
D
B C
E
F
A
D
B
CE
F
1
1
1
0
1
0
AND/OR size: exp(4), OR size exp(6)

AND/OR vs. ORwith Constraints
E 0 1 0 1 0 1 0 1
0C 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
F 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
D 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0B 1 0 1
A 0 1
AOR
0AND 1
BOR B
0AND 1 0 1
EOR C E C E C E C
OR D F D F D F D F D F D F D F D F
AND 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
AND 0 10 1 0 10 1 0 10 1 0 10 1
E 0 1 0 1 0 1 0 1
0C 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
F 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
D 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0B 1 0 1
A 0 1
E 0 1 0 1 0 1 0 1
0C 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
F 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
D 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0B 1 0 1
A 0 1
AND/OR
OR
A
D
B C
E
F
A
D
B
CE
F
No-goods(A=1,B=1)(B=0,C=0)

AND/OR vs. ORwith Constraints
E 0 1 0 1 0 1
C 1 1 0 1 0 1 1 1
F 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
D 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0B 1 0
A 0 1
AOR
0AND 1
BOR B
0AND 1 0
EOR C E C E C
OR D F D F D F D F
AND 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
AND 10 1 0 10 1 10 1
E 0 1 0 1 0 1
C 1 1 0 1 0 1 1 1
F 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
D 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0B 1 0
A 0 1
E 0 1 0 1 0 1
C 1 1 0 1 0 1 1 1
F 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
D 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0B 1 0
A 0 1
AND/OR
OR
A
D
B C
E
F
A
D
B
CE
F
No-goods(A=1,B=1)(B=0,C=0

DFS algorithm (#CSP example)
A
0
B
0
E C
D F D F
0 1 0 1 0 1 0 1
OR
AND
OR
AND
OR
OR
AND
AND 0 10 1
A
D
B C
E
F
AND node: Combination operator (product)OR node: Marginalization operator (summation)
A
D
B
CE
F
1 1 1 0 1 1 0
1
0
2 1
2
2 0
0
2
1
2
4
B
1
1 0 1
E C E C E C
D F D F D F D F D F D F
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0 10 1 0 10 1 0 10 1
1 0 1 0 0 1 0
1
0
1 1
1
1 0
0
1
0
1
1
1 1 1 0 1 1 1
1
0
2 1
2
2 1
2
4
0
1
4
1 0 1 0 0 1 1
0
0
1 1
1
1 1
1
2
1
1
2
5 6
11
65
Value of node = number of solutions below it
solution

Pseudo-Trees (Freuder 85, Bayardo 95, Bodlaender and Gilbert, 91)
(a) Graph
4 61
3 2 7 5
(b) DFS treedepth=3
(c) pseudo- treedepth=2
(d) Chaindepth=6
4 6
1
3
2 7
5 2 7
1
4
3 5
6
4
6
1
3
2
7
5
m <= w* log n

Tasks and value of nodes V( n) is the value of the tree T(n) for the task:
Consistency: v(n) is 0 if T(n) inconsistent, 1 othewise. Counting: v(n) is number of solutions in T(n) Optimization: v(n) is the optimal solution in T(n) Belief updating: v(n), probability of evidence in T(n). Partition function: v(n) is the total probability in T(n).
Goal: compute the value of the root node recursively using dfs search of the AND/OR tree.
AND/OR search tree and algorithms are ([Freuder & Quinn85], [Collin, Dechter & Katz91], [Bayardo & Miranker95],[Darwiche 2001], [Bacchus et. Al, 2003])
Space: O(n) Time: O(exp(m)), where m is the depth of the pseudo-tree Time: O(exp(w* log n)) BFS is time and space O(exp(w* log n)

From AND/OR Tree
A
D
B C
E
F
A
D
B
CE
F
G H
J
K
G
H
J
KAOR
0AND 1
BOR B
0AND 1 0 1
EOR C E C E C E C
OR D F D F D F D F D F D F D F D F
AND
AND 0 10 1 0 10 1 0 10 1 0 10 1
OR
OR
AND
AND
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1

To an AND/ORGraph
A
D
B C
E
F
A
D
B
CE
F
G H
J
K
G
H
J
KAOR
0AND 1
BOR B
0AND 1 0 1
EOR C E C E C E C
OR D F D F D F D F D F D F D F D F
AND
AND 0 10 1 0 10 1 0 10 1 0 10 1
OR
OR
AND
AND
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1

AND/OR Search Graphs
Any two nodes that root identical subtrees/subgraphs (are unifiable) can be merged
Minimal AND/OR search graph: of R relative to tree T is the closure under merge of the AND/OR search tree of R relative to T, where inconsistent subtrees are pruned.
Canonicity: The minimal AND/OR graph relative to T is unique for all constraints equivalent to R.

Context based caching Caching is possible when context is the same
context = parent-separator set in induced pseudo-graph
= current variable + ancestors connected to subtree below
A
D
B C
E
F
A
D
B
CE
F
G H
J
K
G
H
J
K
context(B) = {A, B}
context(C) = {A,B,C}
context(D) = {D}
context(F) = {F}

CachingA
D
B C
E
F
A
D
B
CE
F
G H
J
K
G
H
J
KAOR
0AND 1
BOR B
0AND 1 0 1
EOR C E C E C E C
OR D F D F D F D F D F D F D F D F
AND
AND 0 10 1 0 10 1 0 10 1 0 10 1
OR
OR
AND
AND
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
context(B) = {A, B}context(C) = {A,B,C}context(D) = {D}context(F) = {F}

Caching
A
D
B C
E
F
A
D
B
CE
F
G H
J
K
G
H
J
KAOR
0AND 1
BOR B
0AND 1 0 1
EOR C E C E C E C
OR D F D F D F D F D F D F D F D F
AND
AND 0 10 1 0 10 1 0 10 1 0 10 1
OR
OR
AND
AND
0
G
H H
0 1 0 1
0 1
1
G
H H
0 1 0 1
0 1
0
J
K K
0 1 0 1
0 1
1
J
K K
0 1 0 1
0 1
context(D)={D}
context(F)={F}

All Four Search Spaces
Full OR search tree
126 nodes
Full AND/OR search tree
54 AND nodes
Context minimal OR search graph
28 nodes
Context minimal AND/OR search graph
18 AND nodes
0 1 0 1 0 1 0 1
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0 1 0 1 0 1 0 10 1 0 1 0 1 0 1 0 1 0 1 0 1 0 10 1 0 1 0 1 0 1 0 1 0 1 0 1 0 10 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
0 1 0 1
C
D
F
E
B
A 0 1
AOR
0AND
BOR
0AND
OR E
OR F F
AND 0 1 0 1
AND 0 1
C
D D
0 1 0 1
0 1
1
E
F F
0 1 0 1
0 1
C
D D
0 1 0 1
0 1
1
B
0
E
F F
0 1 0 1
0 1
C
D D
0 1 0 1
0 1
1
E
F F
0 1 0 1
0 1
C
D D
0 1 0 1
0 1
0 1 0 1 0 1 0 1
0 1 0 1 0 1 0 1
0 1
0 1 0 1
0 1 0 1
C
D
F
E
B
A 0 1
AOR0ANDBOR
0AND
OR E
OR F F
AND 0 1
AND 0 1
C
D D
0 1
0 1
1
EC
D D
0 1
1
B
0
E
F F
0 1
C
1
EC
A
E
C
B
F
D

Properties of minimal AND/OR graphs
Complexity: Minimal AND/OR R relative to pseudo-tree T is
O(exp(w*)) where w* is the tree-width of R along T.
Minimal OR search graph is O(exp(pw*)) where pw* is path-width
w* ≤ pw*, pw* ≤ w*log n
Canonicity: The minimal AND/OR search graph is unique (canonical)
for all equivalent formulas (Boolean or Constraints), consistent with its pseudo tree.

Searching AND/OR Graphs
AO(j): searches depth-first, cache i-context j = the max size of a cache table (i.e.
number of variables in a context)
i=0
i=w*
Space: O(n)
Time: O(exp(w* log n))
Space: O(exp w*)
Time: O(exp w*)Space: O(exp(j) )
Time: O(exp(m_j+j )
j

Context-Based CachingA
D
B
EC
F
context(A) = {A}context(B) = {B,A}context(C) = {C,B}context(D) = {D}context(E) = {E,A}context(F) = {F}
Cache Table (C)
B CValu
e0 0 50 1 21 0 21 1 0
A
0
B
0
EC
D D
0 1
1
EC
D D
0 1
1
B
0
EC
1
EC
5
5
5 2
3
6
2 0
4
5
4 4
46
7
7
A
E
C
B
F
D
Primal graph
Space: O(exp(2))

Outline
Background in Graphical models AND/OR search trees and Graphs Minimal AND/OR graphs From AND/OR search graphs to AOMDDs Compilation of AOMDDs AOMDDs and earlier BDDs
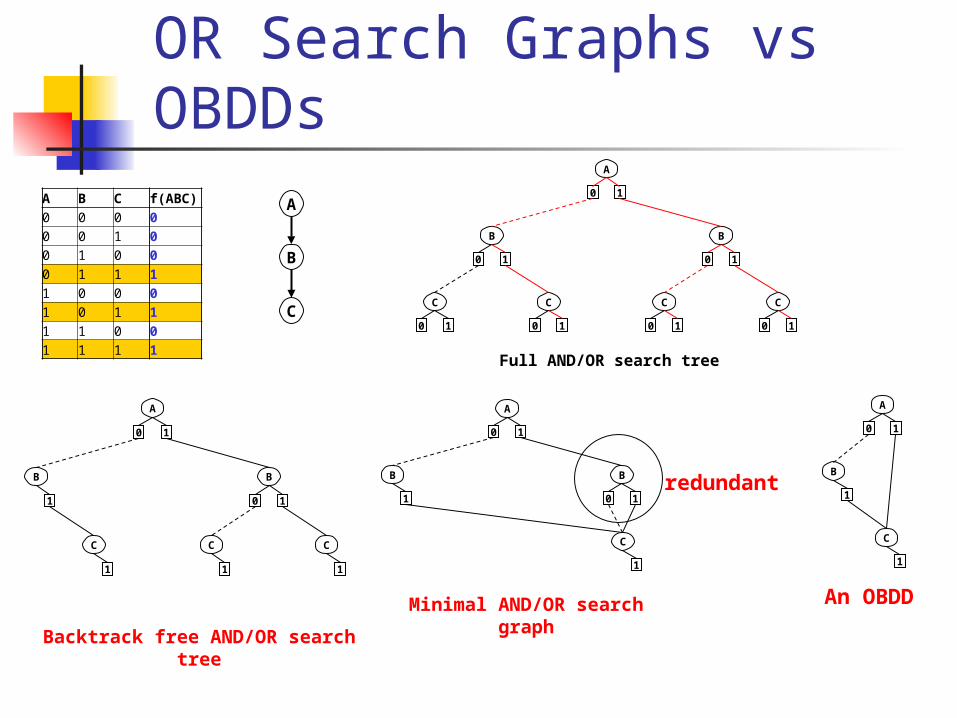
OR Search Graphs vs OBDDs
A
B
C
A B C f(ABC)
0 0 0 0
0 0 1 0
0 1 0 0
0 1 1 1
1 0 0 0
1 0 1 1
1 1 0 0
1 1 1 1
A
0 1
B
0 1
C
0 1
C
0 1
B
0 1
C
0 1
C
0 1
Full AND/OR search tree
A
0 1
B
1
C
1
B
0 1
C
1
C
1
Backtrack free AND/OR search tree
A
0 1
B
1
B
0 1
C
1
Minimal AND/OR search graph
redundant
A
0 1
B
1
C
1
An OBDD

AND/OR Search Graphs; AOBDDs
A
B
DC
A
0 1
B
1
C
1
D
1
D
0
redundancy
F(A,B,C,D)= (0,1,1,1), (1,0,1,0), (1,1,1,0)
A
0 1
B
1
C
1
D
1
D
0
B
0 1
AOBDD(F)

AND/OR Search Graphs; AOBDDs
A
B
DC
A
0 1
B
1
C
1
D
1
D
0
redundancy
F(A,B,C,D)= (0,1,1,1), (1,0,1,0), (1,1,1,0)
A
0 1
B
1
C
1
D
1
D
0
B
0 1
AOBDD(F)

AOBDD Conventions
A
B
DC
A
0 1
B
1
C
1
D
1
D
0
Point dead-ends to terminal 0Point goods to terminal 1
A
0 1
B
0 1
0
C
0 1
1
D
0 1
D
0 1

AOBDD ConventionsA
B
DC
A
0 1
B
1
C
1
D
1
D
0
A
0 1
B
0 1
0
C
0 1
1
D
0 1
D
0 1
IntroduceMeta-nodes

Combining AOBDD (apply)A
B
C
A B C f(ABC)
0 0 0 0
0 0 1 0
0 1 0 0
0 1 1 1
1 0 0 0
1 0 1 1
1 1 0 0
1 1 1 1
0
A
0 1
B
0 1
1
C
0 1
*
A
B
D
A B D g(ABC)
0 0 0 0
0 0 1 0
0 1 0 0
0 1 1 1
1 0 0 1
1 0 1 0
1 1 0 1
1 1 1 0
A
B
DC
0
A
0 1
B
0 1
1
D
0 1
D
0 1
=
A
0 1
B
0 1
0
C
0 1
1
D
0 1
D
0 1

HG
ED
CF
B
A
F0 1
H0 1
0 1C1
A0 1
H0 1
0 1C2
A0 1
B0 1
G0 1
G0 1
B0 1
0 1C3
F0 1
G0 1
0 1C4
A0 1
E0 1
0 1C6
C0 1
E0 1
0 1C7
C0 1
D0 1
D0 1
0 1C8
B0 1
C0 1
0 1C9
B0 1
F0 1
0 1C5
m1
m3
m7
m6
m4 m 2m 5
Example:(f+h) * (a+!h) * (a#b#g) * (f+g) * (b+f) * (a+e) * (c+e) * (c#d) * (b+c)
A0 1
F0 1
H0 1
F0 1
H0 1
0 1m1
A0 1
B0 1
G0 1
F0 1
B0 1
G0 1
0 1m2
A0 1
E0 1
C0 1
0 1m4
C0 1
D0 1
D0 1
0 1m5
A0 1
B0 1
F0 1
G0 1
H0 1
F0 1
G0 1
B0 1
F0 1
F0 1
H0 1
0 1m3
A0 1
B0 1
C0 1
C0 1
D0 1
E0 1
D0 1
B0 1
C0 1
C0 1
0 1m6
m7
A
F
H
D
C B F
AE
G
H
primal graph
A
B
C F
D E G H
pseudo tree
A
B
F
G H
C
D
A
B
C
D E
A
B
C F
D E G H
A
B
F
G
C
E
A

B
A
Example (continued)
m7
A0 1
B0 1
F0 1
G0 1
H0 1
F0 1
G0 1
B0 1
F0 1
F0 1
H0 1
0 1m3
A0 1
B0 1
C0 1
C0 1
D0 1
E0 1
D0 1
B0 1
C0 1
C0 1
0 1m6
A
B
C F
D E G H
m7
A0 1
B0 1
C0 1
0
D0 1
1
F0 1
G0 1
H0 1
C0 1
D0 1
E0 1
F0 1
G0 1
B0 1
C0 1
F0 1
C0 1
F0 1
H0 1

AOBDD vs. OBDD
D
C
B
F
A
E
G
H
1 0
B
CC C
D D D D D
E E
F F F
G G G G
H
AOBDD
18 nonterminals
47 arcs
OBDD
27 nonterminals
54 arcs
A0 1
B0 1
C0 1
0
D0 1
1
F0 1
G0 1
H0 1
C0 1
D0 1
E0 1
F0 1
G0 1
B0 1
C0 1
F0 1
C0 1
F0 1
H0 1
A
B
C F
D E G H
A
B
C
F
D
E
G
H
D
C B F
AE
G
H
primal graph

Complexity
Complexity of apply: Complexity of apply is bounded quadratically by the product of input AOBDDs restricted to each branch in the output pseudo-tree.
Complexity of VE-AOBDD: is exponential in the tree-width along the pseudo-tree.

AOMDDs and tree-BDDs
Tree-BDDs (McMillan1994) are :
AND/OR BDDS are
)2|(|22 wwgO
)|(| wkgO

Related work
Related work in Search Backjumping + learning (Freuder 1988,Dechter
1990,Bayardo and Mirankar 1996) Recursive-conditioning (Darwiche 2001) Value elimination (Bacchus et. Al. 2003) Search over tree-decompositions (Trrioux et. Al. 2002)
Related to compilation schemes: Minimal AND/OR – related to tree-OBDDs (McMillan 94), d-DNNF (Darwiche et. Al. 2002) Case-factor diagrams (Mcallester, Collins, Pereira, 2005)
Tutorial references: Dechter, Constraint processing, Morgan Kauffman, 2003 Dechter, Tractable Structures of Constraint Satisfaction
problems,In Handbook of constraint solving, forthcoming.

Conclusion
AND/OR search should always be used.
AND/OR BDDs are superior to OBDDs.
A search algorithm with good and no-good learning generates an OBDD or an AND/OR Bdds.
Dynamic variable ordering can be incorporated
With caching, AND/OR search is similar to inference (variable-elimination)
The real tradeoff should be rephrased: Time vs space rather than search vs inference, or search vs model-
checking.
Search methods are more sensitive to this tradeoff.