further pure 1 transformations. 2 × 2 matrices can be used to describe transformations in a 2-d...
TRANSCRIPT

Further Pure 1
Transformations
Transformations
2 × 2 matrices can be used to describe transformations in a 2-d plane.
Before we look at this we are going to look at particular transformations in the 2D plane.
A transformation is a rule which moves points about on a plane.
Every transformation can be described as a multiple of x plus a multiple of y.

Transformations
Lets look at a point A(-2,3) and map it to the co-ordinate (2x+3y,3x-y)
This gives us the co-ordinate
(2×-2 + 3×3, 3×-2–3)
=(5,-9) Where would the
co-ordinate (2,1) map to?
(-2,3)
(5,-9)
(2,1)
(7,5)

Transformations
Take the transformation reflecting an object in the y-axis. The black rectangle is the object and the orange one is the image. What has happened to the co-ordinates in the reflection? Lets look at one specific co-ordinate, (2,1).
Under the reflection the co-ordinate becomes (-2,1)
You can probably notice that there is a general rule for all the co-ordinates.
For each co-ordinate the x becomes negative and the y stays the same.
Lets use the general co-ordinate (x,y) and let them map to (x`,y`).
(2,1)(-2,1)

Reflection in y-axis We can see that x -x & y y. Or x` = -x
y` = y So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = -1x + 0yy` = 0x + 1y
Finally we can summarise the equations co-efficient’s by using matrix notation. (2,1)(-2,1)
10
01

Reflection in x-axis We can see that x x & y -y. Or x` = x
y` = -y So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = 1x + 0yy` = 0x + -1y
Finally we can summarise the equations co-efficient’s by using matrix notation.
1-0
01
(2,1)
(2,-1)

Reflection in y = x We can see that x y & y x. Or x` = y
y` = x So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = 0x + 1yy` = 1x + 0y
Finally we can summarise the equations co-efficient’s by using matrix notation.
01
10(2,1)
(1,2)

Reflection in y = -x We can see that x -x & y y. Or x` = -y
y` = -x So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = 0x + -1yy` = -1x + 0y
Finally we can summarise the equations co-efficient’s by using matrix notation. (2,1)
(-1,-2)
01-
1-0

Enlargement SF 2, centre (0,0)
We can see that x 2x & y 2y. Or x` = 2x
y` = 2y So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = 2x + 0yy` = 0x + 2y
Finally we can summarise the equations co-efficient’s by using matrix notation.
(1,2)
(2,4)
20
02
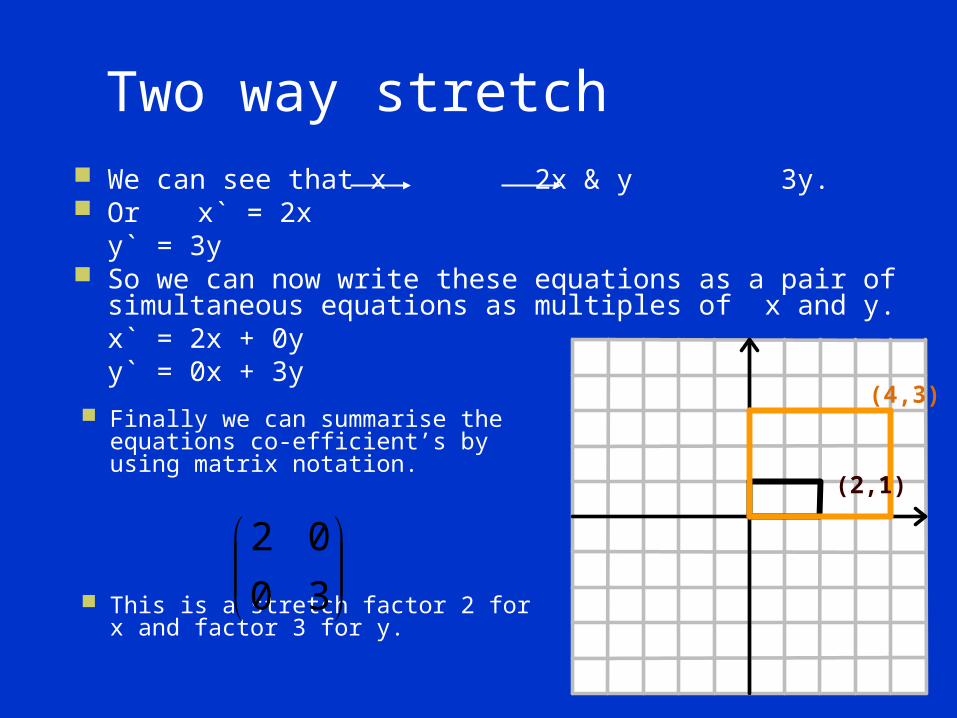
Two way stretch We can see that x 2x & y 3y. Or x` = 2x
y` = 3y So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = 2x + 0yy` = 0x + 3y
Finally we can summarise the equations co-efficient’s by using matrix notation.
This is a stretch factor 2 for x and factor 3 for y.
(2,1)
(4,3)
30
02
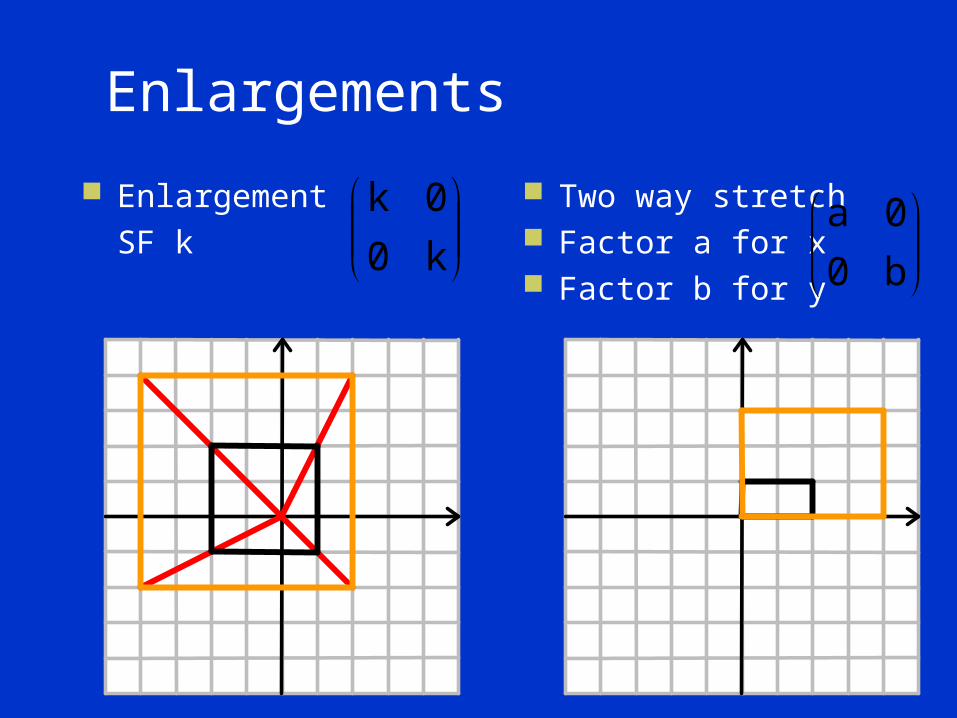
Enlargements
Enlargement
SF k
Two way stretch Factor a for x Factor b for y
b0
0a
k0
0k

Rotation 90o anti-clockwise We can see that x -y & y x. Or x` = -y
y` = x So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = 0x – 1yy` = 1x + 0y
Finally we can summarise the equations co-efficient’s by using matrix notation.
(4,2)
(-2,4)
01
1-0

Rotation 90o clockwise We can see that x y & y -x. Or x` = y
y` = -x So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = 0x + 1yy` = -1x + 0y
Finally we can summarise the equations co-efficient’s by using matrix notation.
(4,2)
(2,-4)
01-
10

Rotation 180o
We can see that x -x & y -y. Or x` = -x
y` = -y So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = -1x + 0yy` = 0x – 1y
Finally we can summarise the equations co-efficient’s by using matrix notation.
(4,2)
(-4,-2)
1-0
01-

We are going to think about this example in a slightly different way. The diagram shows the points I(1,0) and J(0,1) and there images after a rotation through θ
anti-clockwise. You can see OI = OJ = OI` = OJ` From the diagram we can see that
cos θ = a/1 a = cos θ sin θ = b/1 b = sin θ
Therefore I` is (cos θ, sin θ) andJ` is (-sin θ, cos θ)
The transformation matrix is
Rotation through θ anti-clockwise.
cosθsinθ
sinθ-cosθ
I(1,0)
J(0,1) I`(a,b)J`(-b,a)
11
a
ba
b

Rotation through θ clockwise.
What would be the matrix for a 90o rotation clockwise.
cosθsinθ-
sinθcosθ
Transformations - Shears
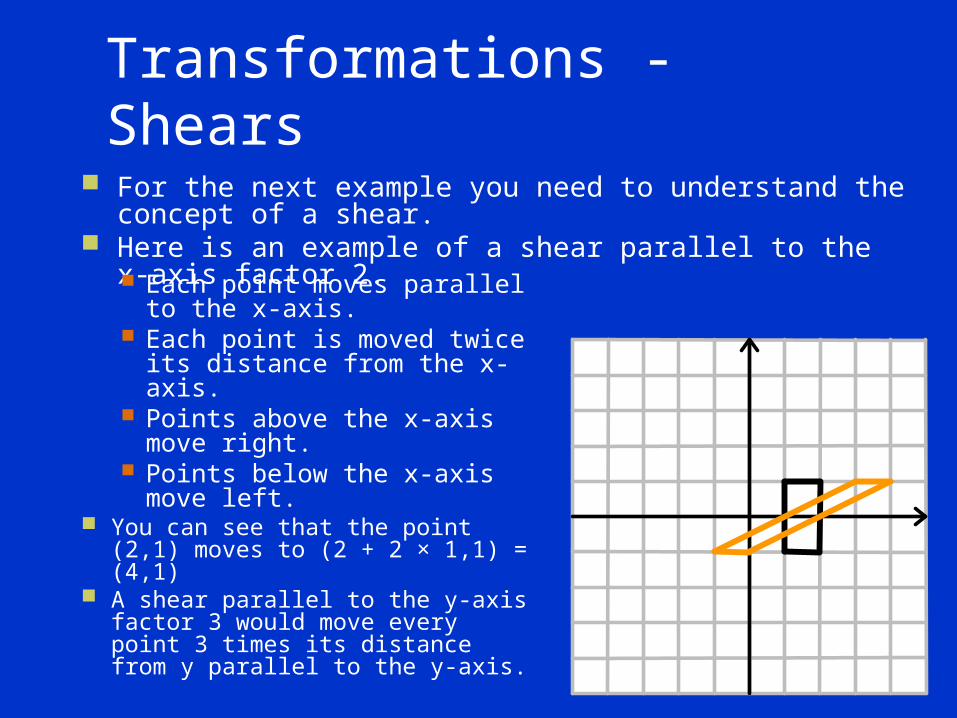
For the next example you need to understand the concept of a shear.
Here is an example of a shear parallel to the x-axis factor 2. Each point moves parallel
to the x-axis. Each point is moved twice
its distance from the x-axis. Points above the x-axis
move right. Points below the x-axis
move left. You can see that the point (2,1)
moves to (2 + 2 × 1,1) = (4,1) A shear parallel to the y-axis
factor 3 would move every point 3 times its distance from y parallel to the y-axis.

Shear parallel to x-axis factor 2
We can see that x x + 2y & y y. Or x` = x + 2y
y` = y So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = 1x + 2yy` = 0x + 1y
Finally we can summarise the equations co-efficient’s by using matrix notation.
(2,1) (4,1)
10
21

Shear parallel to y-axis factor 2
We can see that x x & y y + 2x . Or x` = x
y` = 2x + y So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = 1x + 0yy` = 2x + 1y
Finally we can summarise the equations co-efficient’s by using matrix notation. (2,1)
(2,5)
12
01

Two way shear factor 2 We can see that x x + 2y & y y + 2x. Or x` = x + 2y
y` = 2x + y So we can now write these equations as a pair of
simultaneous equations as multiples of x and y.x` = 1x + 2yy` = 2x + 1y
Finally we can summarise the equations co-efficient’s by using matrix notation. (2,1)
(4,5)
12
21

Using multiplication with transformations
Lets go back to the first transformation that we looked at. We know that the matrix for reflecting in the y-axis is
Now lets write down the co-ordinates of the object as a matrix.
What happens if we multiply the two matrices together.
The multiplication performs the transformation and the new matrix is the co-ordinates of the image.
3311
1221
3311
1221
10
01

Rotation 180o
What happens if you rotate 90o cw, twice.
What happens if you reflect in x then in y.
You actually get the same transformation as rotating through 180o.
This leads us nicely in to multiple transformations.
10
01
01
10
01
10
10
01
10
01
10
01
10
01

Composition of transformations
Notation: A single bold italic letter such as T is often used to
represent a transformation. A bold upright T is used to represent a matrix
itself. If you have a point P with position vector p The image of p can be denoted
P` = p` = T(P) If you transform p by a transformation X then by
a transformation Y the result would be:Y(X(p)) = YX(p)