fuzzy logic controller design -...
TRANSCRIPT

45
Chapter 4
FUZZY LOGIC CONTROLLER DESIGN 4.1 Introduction
This chapter presents an overview of fuzzy logic evolution and Fuzzy Logic Controller
[FLC] engineering developments. FLC development current trends are also reviewed. Finally the
design and implementation methodology of the Mamdani type fuzzy Proportional-Integral (PI)
controller, implemented in this research for acceleration waveform amplitude control of an
electrodynamic shaker system, is presented by deriving its structure from conventional PI
controller. Detailed mathematical formulation and the resulting incremental control actions are
formulated computed and have been presented in this chapter.
4.2 Overview of fuzzy logic development
The idea of fuzzy sets was born in July 1964. It was originated by Lofti A. Zadeh, Professor
in the department of electrical engineering and computer science at University of California,
Berkeley. Professor Zadeh believed that all real-world problems could be solved with efficient,
analytical methods and/or fast electronic computers. In this direction, he has made significant
contributions in the development of system theory [e.g. the state variable approach to the solution
of simultaneous differential equations] and computer science. In early 1960s, however, he began to
feel that traditional system analysis techniques were too precise for many complex real-world
problems. In a paper, in 1961, he mentioned that a different kind of mathematics, the mathematics
of fuzzy quantities, was needed for most practical cases. A priori data as well as the criteria by
which the performance of a man-made system is judged are far from being precisely specified or
having accurately known probability distributions. The idea of grade of membership, which is a tile
concept that became the backbone of fuzzy set theory, occurred to him then. This important event

46
led to the publication of his seminal paper on fuzzy sets in 1965 and the birth of fuzzy logic
technology [Zadeh, 1965; Zadeh, 1972; Zadeh, 1972; Zadeh, 1977; Zadeh, 1988; Zadeh, 1996].
Even though there was strong resistance to fuzzy logic initially, many researchers around
the world became Zadeh's followers. While Zadeh continued to broaden the foundation of fuzzy set
theory, scholars and scientists in a wide variety of fields - ranging from psychology, sociology,
philosophy and economics to natural sciences and engineering were exploring this new paradigm
during the first decade after the birth of fuzzy set theory. Important concepts introduced by Zadeh
during this period include fuzzy multistage decision-making, fuzzy similarity relations, fuzzy
restrictions, and linguistic hedges. Other contributions include R. E. Bellman's work [with Zadeh]
on fuzzy multistage decision making [Bellman & Zadeh, 1970], G. Lakoff's work from a linguistic
view [Lakoff, 1973], J. A. Goguen's work on the category theoretic approach to fuzzify
mathematical structure [Goguen, 1969; Goguen, 1975], L. J. Kohout and B. R. Gaines on the
foundation of fuzzy logic [Gaines, 1976; Kohut, 1976], the work on fuzzy measures by R. E. Smith
and M. Sugeno [Smith, 1970; Sugeno, 1975], Meseguer's work on fuzzified algebraic and
topological systems [Meseguer & Sols, 1975], C. L. Chang's work on fuzzy topology [Chang,
1968], Dunn work on fuzzy clustering [Dunn, 1973], C. V. Negoita's work on fuzzy information
retrieval [Negotia, 1969; Negotia & Ralescu, 1974; Negotia & Flondor, 1976], the work by M.
Mizumoto and K. Tanaka on fuzzy automata and fuzzy grammars [Mizumoto, 1971; Mizumoto,
Toyoda & Tanaka, 1969; Mizumoto & Tanaka, 1976; Mizumoto & Zimmermann, 1982], A.
Kandel's work on the fuzzy switching function [Kandel, 1973; Kandel, 1974], and H. J.
Zimmermann's work on fuzzy optimization [Zimmermann, 1975]. During the first decade, many
mathematical structures were fuzzified by generalizing the underlying sets to be fuzzy. These
structures include logics, relations, functions, graphs, groups, automata, grammars, languages,
algorithms, and programs.
In the late 1970s, a few small university research groups on fuzzy logic were established in
Japan. Professor T. Terano and Professor H. Shibata from Tokyo University led one such group. A
47
second research group in the Kanasai area was led by Professor K. Tanaka from Osaka University
and Professor K. Asai from of the Osaka Prefecture University. An important milestone in the
history of FLC was established by Assilian and E. H. Mamdani in the United Kingdom in 1974.
They developed the first FLC, which was for controlling a steam generator. Initially, they compared
learning algorithms for adaptive control of a nonlinear, multi-dimensional plant for a physical
steam engine. They found that many learning schemes even failed to begin to converge on a
reasonable time scale. A fuzzy linguistic method was developed to prime the learning controller
with an initial policy to speed the adaptation. The verbal statements of engineers were transcribed
as fuzzy rules and were used under fuzzy logic to form a control policy. The performance of these
fuzzy linguistic controllers was so good in their own right, however, they became focal point to a
range of studies that subsequently took place. As early as 1975, E. H. Mamdani and, Baaklini
already showed that fuzzy control rules may be tuned automatically by fuzzy linguistic adaptive
strategies.
In 1976, the first industrial application of fuzzy logic was developed by M/S Blue Circle
Cement and M/S SIRA in Denmark. The system was a cement kiln controller that incorporates the
‘know-how’ of experienced operators to enhance the efficiency of a clinker through smoother
grinding. The system went to operation in 1982. After few years of persistent research,
development, and deployment efforts, Seiji Yasunobu and his colleagues at Hitachi put a fuzzy
logic-based automatic train operation control system into operation in Sendai city's subway system
in 1987. Another early successful industrial application of fuzzy logic is a water-treatment system
developed by M/S Fuji Electric. The development of water treatment systems enabled Fuji Electric
to introduce the first Japanese general-purpose FLC [named FRUITAX] into the market in 1985.
After a successful demonstration of these approaches, it took years for both projects to be deployed
in real-world operation due to various concerns about this new technology. Also these two
applications became the major "success stories" of fuzzy logic technology in Japan. Consequently,
many more Japanese engineers and companies started to investigate fuzzy logic applications.
48
The fuzzy boom in Japan was a result of the close collaboration and technology transfer
between universities and industries. In 1988, the Japanese government launched a careful feasibility
study about establishing national research projects on fuzzy logic involving both universities and
industry. Two large-scale national research projects were established by two agencies - the Ministry
of International Trade and Industry [MITI] and the Science and Technology Agency [STA]. The
project established by MITI was a consortium called the Laboratory for International Fuzzy
Engineering Research [LIFE], which involved 50 companies. M/S Matsushita Electric Industrial
[also known as M/S Panasonic outside Japan] was the first to apply fuzzy logic to a consumer
product, a shower head that controlled water temperature, in 1987. In late January 1990, Matsushita
Electric Industrial named their newly developed fuzzy controlled automatic washing machine
"Asai-go Day Fuzzy" and launched a major commercial campaign for the "fuzzy" product. This
campaign turned out to be a successful marketing effort not only for the product, but also for the
fuzzy logic technology. A foreign word pronounced "fuzzy" was thus introduced to Japan with new
meaning - intelligence. Many other home electronics companies followed Panasonic's approach and
introduced fuzzy vacuum cleaners, fuzzy rice cookers, fuzzy refrigerators, and others. This resulted
in a fuzzy vogue in Japan. As a result, consumers in Japan recognized the Japanese word "fuzzy,"
which won the gold prize for a new word in 1990.
This fuzzy boom in Japan triggered a broad and serious interest in this technology in
Europe, and, to a lesser extent, in the United States, where fuzzy logic was invented. Several major
European companies formed fuzzy logic task forces within their corporate research and
development divisions. They include M/S SGS -Thomson of Italy, M/S Siemens, M/S Daimler-
Benz, and M/S Klockner-Moeller in Germany. In the United States, the M/S General Electric
Corporate Research Division and M/S Rockwell International Science Center have both developed
advanced fuzzy logic technology as well as their industrial applications.
Fuzzy logic has found applications in other areas also. The first financial trading system
using fuzzy logic was Yamaichi Fuzzy Fund. It handles 65 industries and a majority of the stocks

49
listed on Nikkei Dow and consists of approximately 800 fuzzy rules. Rules are determined monthly
by a group of experts and modified by senior business analysts as necessary. The system was tested
for two years, and its performance in terms of the return and growth exceeds the Nikkei average by
over 20 percent. The system recommended ‘sell’ 18 days before the black Monday in 1987 and it
went into commercial operation in 1988.
The development of fuzzy systems in the early days required the manual tuning of the
system parameters based on observing system performance. This drawback has become one of the
major criticisms of fuzzy logic. Even though E. H. Mamdani and Baaklini introduced self-adaptive
FLC as early as 1975, the most common citation of the first work in this area is a paper by T. J.
Procyk and E. H. Mamdani published in 1979 [Procyk & Mamdani, 1979]. This was followed by
Japanese researchers in the 1980s. T. Takagi and his advisor M. Sugeno [Takagi & Sugeno, 1985]
together took an important step by developing the first approach for constructing [not tuning] fuzzy
rules using training data. Their approach developed fuzzy rules for controlling a toy vehicle by
observing how a human operator controlled the vehicle. Even though this important work did not
gain as much immediate attention as it did later, it laid the foundation for a popular subarea in fuzzy
logic, which is now referred to as fuzzy model identification of the 1990s.
Another trend that contributed to research in fuzzy model identification is the increasing
visibility of neural network research in the late 1980s. Because of certain similarities between
neural networks and fuzzy logic, researchers began to investigate ways to combine the two
technologies. The most important outcome of this trend is the development of various techniques
for identifying the parameters in a fuzzy system using neural network learning techniques. A
system built this way is called a neuro-fuzzy system. Bart Kosko has been known for his
contribution to neuro-fuzzy systems [Kosko, 1992]. The combination of the two techniques has led
to many new developments getting benefits from each of the methods. The other work in this has
been done by [Zimmermann, 1991; Yager & Filev, 1994; Zilouchian & Jamshidi, 2001].
50
The 1990s has been an era of new computational paradigm. In addition to fuzzy logic and
neural network, a third nonconventional computational paradigm has also become popular –
evolutionary computing, which includes Genetic Algorithms (GA), evolutionary strategies, and
evolutionary programming. GA and evolutionary strategies are optimization techniques that attempt
to avoid being easily trapped in local minima by simultaneously exploring multiple points in the
search space and by generating new points based on the Darwinian theory of evolution - survival of
the fittest. The popularity of GA inspired its usage in optimizing parameters in fuzzy systems. The
various combinations of neural network, genetic algorithm and fuzzy logic help one to view them
as complementary.
4.3 FLC recent developments
For the last two decades good research has been published on FLC. Overall the work done
can be categorized into three major parts. The first research component is on the Proportional-
Integral-Derivative (PID) controller tuning and system identification using fuzzy logic. Second
research component is of FLC design, analytical structures and stability analysis. The third research
component is on the effects of membership functions and inferencing mechanisms. Following
sections presents the recent literature on these three components.
a. Gain scheduling using fuzzy logic: Fuzzy logic has been used for gain scheduling of the
PID controller and identification of the systems by several researchers. [Takagi & Sugeno, 1985],
investigated the fuzzy identification of systems and its application to modelling and control.
[Graham & Newell, 1989], carried out the fuzzy adaptive control of a first order process. [Zhao,
Tomizuka & Isaka, 1993], described the development of a fuzzy gain scheduling scheme of PID
controllers for process control. They utilized fuzzy rules and reasoning on-line to determine the
controller parameter based on error signal and its first difference. Simulation results showed better
performance than PID tuned by Ziegler & Nichols technique. [Blanchett, Kember & Dubay, 2000],
showed a PID gain scheduling using fuzzy logic that allows for the online replacement and
51
subsequent improvement of conventional PID. The approach was demonstrated on a physical
model.
b. FLC design, development and analysis: This section presents the recent literature on the
design, analysis, tuning and related applications of FLC. [Mamdani, 1974], showed an application
of fuzzy control algorithm for controlling simple dynamic plants. [King & Mamdani, 1975], studied
the application of fuzzy control systems to industrial processes. [Kickert & Mamdani, 1978],
carried out the detailed analysis of fuzzy logic controller. [Braae & Rutherford, 1979], studied
theoretical and linguistic aspects of fuzzy logic controller. [Mamdani & Gaines, 1981], introduced
the fuzzy reasoning and its applications. [Mamdani, Estathiou & Sugryam, 1984], presented the
development of fuzzy logic control. [Mizumoto, 1988], investigated fuzzy control under various
reasoning methods. [Lee, 1990a; Lee, 1990b], proposed and showed applications of fuzzy logic in
control systems. [Boverie, Demaya & Titli, 1991], presented a comparative study of fuzzy logic
control compared with other automatic control approaches. [Bouslama & Lchikawa, 1992],
investigated the fuzzy control rules and their natural control laws. [Jang, 1992] investigated a self-
learning fuzzy controllers based on temporal back propagation. [Mizumoto, 1992], proposed the
realization of PID controls by fuzzy control method. [Lee, 1993], investigated the methods for
improving performance of PI-type fuzzy logic controllers. [Chen, Chen & Chen, 1993], carried out
the analysis and design of fuzzy control systems. [He, Tan, Xu & Wang, 1993], presented the fuzzy
self-tuning of PID controllers. [Mamdani, 1993], presented the twenty years of fuzzy control
experiences and lessons learnt. Further, [Chen & Kuo, 1995], presented the design and analysis of a
fuzzy logic controller. [Manoranjan, Lazaro, Edwards & Athalye, 1995], synthesized a systematic
approach to obtaining fuzzy sets for control system applications. [Ketata, Geest & Titli, 1995],
introduced fuzzy controller: design, evaluation, parallel and hierarchical combination with a PID
controller. [Chen, 1996], presented an overview of conventional and fuzzy PID controllers.
Conventional and fuzzy PID controllers were reviewed. Various applications of fuzzy PID
controllers were proposed. [Misir, Malki & Chen, 1996], described the design principle, tracking

52
performance and stability analysis of a fuzzy PI + D controller. The proposed controller had
superior tracking performance as compared to classical one. [Li, 1997], suggested a comparative
design and tuning method for conventional fuzzy control. [Verbruggen & Bruijn, 1997], studied the
general comparative aspects of fuzzy control and conventional control. They investigated the
important role that fuzzy control may play along with the other tools like conventional and artificial
intelligence. [Ann & Gosine, 1999], proposed some new methodology for analytical and optimal
design of fuzzy PID controllers based on theoretical analysis and genetic based optimization. One
important feature of the proposed controller is its simple structure. It uses a one-input fuzzy
inference, with three rules and six tuning parameters. [Mann, Hu & Gosine, 1999], carried out
analysis of direct action fuzzy PID controller structures. They investigated the details of complex
fuzzy PID demonstrating the greater flexibility, and better functional properties.
In the more recent work in last decade, [Carvajal, Chen & Ogmen, 2000], presented the
detailed fuzzy PID controller design, analysis, performance evaluation, and stability analysis.
[Emami, Goldenberg & Turksen, 2000], demonstrated a fuzzy-logic control of dynamic systems:
from modeling to design. [Hu, Mann & Gosine, 2001], presented a systematic study of fuzzy PID
controllers using function based evaluation approach. They have shown that the Zadeh-Mamdani’s
max-min-gravity scheme produces the highest score in terms of nonlinearity variations, which is
superior to other schemes, such as Mizumoto’s product-sum-gravity and Tagaki-Sugeno-Kang
schemes. [Kuswadi, 2001], presented a general review on intelligent control and the applications of
fuzzy logic in control. [Abdel, 2002], presented a non-linear PID controller design using fuzzy
logic control concepts. [Pivonka, 2002], carried out the comparative analysis of various fuzzy
PI/PD/PID controller structure based on classical PID approach. They showed the realization of
various fuzzy controller PI, PD and PID structures. [Eker & Torun, 2006], recommended FLC to be
conventional and implemented FLC for a electrical drive system which happens to be non-linear.
[Chopra, Mitra & Kumar, 2008], presented the auto-tuning of fuzzy PI type controller using fuzzy
logic itself. The input scaling factors are tuned online by gain updating factors whose values are
53
determined by rule base with the error and change in error as inputs according to the required
process. Simulation results showed the effectiveness and robustness of the proposed auto tuning
method. [Abdullah & Ayman, 2008], presented the advantages of PID fuzzy controllers over the
conventional types as they cover a wider range of operating conditioning. They showed the process
loops that can benefit from a non-linear control response and claimed that these are the best
candidate for FLC.
It may be noted that most of the above work has been done in simulation. Fuzzy PID and
PID-type of fuzzy controllers have been simulated for various industrial processes. Some of the
works have also been implemented in hardware. Various industrial applications of fuzzy control are
found in [Sugeno, 1985]. Robotics is one of the focussing applications of fuzzy PID controllers. For
instance, [Bestaoni, 1989], used the decentralized PD and PID regulators. [Ciliz & Isik, 1989],
designed fuzzy rule-based controller for an autonomous mobile robot. [Tomei, 1991], applied an
adaptive PD controller for robot manipulators. [Babuska, & Horacek, 1992], evaluated some fuzzy
controllers in laboratory. [Tang & Chen, 1994], designed a robust fuzzy PI controller for a flexible
joint robot arm with uncertainties up to 10%. Chemical process control is another area of fuzzy
controller applications. Numerous examples can be cited on temperature controller using FLC
[Chen, 1996].
c. Membership functions, inferencing and stability analysis: Various aspects of
inferencing, stability analysis and effects of membership functions are also reported in literature.
[Ciliz & Isik, 1988], studied the stability analysis of fuzzy transfer functions with dominant poles.
[Tanaka & Sugeno, 1992], studied the stability analysis and design of fuzzy control systems. [Ying,
1993], studied a fuzzy controller with linear control rules and claimed that a fuzzy controller with
linear control rules is the sum of a global two-dimensional multilevel relay and a local nonlinear
proportional-integral controller. Same author also studied the general analytical structure of a
typical fuzzy controller and their limiting structure theorems [Ying, 1993]. A multi-region fuzzy
controller for nonlinear process control is studied by [Qin & Borders, 1994]. [Ying, 1994; Ying,
54
1999; Ying, 2000], also studied the analytical structures of fuzzy controller with linear control rules
and analytical structures of the typical fuzzy controller employing trapezoidal input fuzzy sets and
non-linear control rules. [Qin & Borders, 1994], studied a multi-region fuzzy controller for
nonlinear process control applications. [Malki, Li & Chen, 1994], proposed some new design and
stability analysis of fuzzy proportional-derivative control systems. [Koczy & Hirota, 1997],
Investigated the important concept of size reduction by interpolation in fuzzy rule bases. [Jan,
1998], studied the tuning of fuzzy PID controllers.
Recently the focus has been on detailed theoretical analysis. [Tang, Man, Chen & Kwong,
2001], proposed an optimal fuzzy PID controller. The developed controller preserves a linear
structure and has constant coefficient yet self-tunes control gain making the controller as adaptive
in nature. Gains are optimized using multi-objective genetic algorithm thereby yielding a optimal
fuzzy PID controller. [Mann, Hu & Gosine, 2001], Investigated the design, stability analysis and
effects of membership functions on FLC. Analytical structures and analysis of fuzzy PD controller
with multi-fuzzy sets having variable cross point level are studied by [Patel, 2002]. [Mohan &
Patel, 2002; Patel & Mohan, 2002; Patel & Mohan, 2005], studied analytical structures and analysis
of the simplest fuzzy PD controllers. Performance of the fuzzy controller under various
defuzzification methods has been studied in detail. Furthermore, Analytical structures and analysis
of simplest fuzzy PD controller are investigated. [Mohan & Sinha, 2006; Mohan & Sinha, 2008],
proposed simplest fuzzy PID controllers and carried out their mathematical modeling and stability
analysis. They also conducted a detailed study on analytical structure and stability analysis of a
fuzzy PID controller. They utilized two fuzzy sets for the each of the three input variables and four
fuzzy sets for output variables. The structure is derived via left and right trapezoidal membership
function for input, trapezoidal membership function for output, algebraic product triangular norm,
bounded sum triangular co-norm, Mamdani minimum inference method, and center of sums
defuzzification method. [Arya, 2008], investigated the analytical structures and analysis of multi-
fuzzy sets fuzzy PD controller with asymmetrical/symmetrical, trapezoidal/triangular/singleton
55
output membership function. He has investigated the role of changing the parameters of output
membership functions and found that the performance is enhanced. Some theoretical studies are
presented for validation of the proposal. [Juang, Chang & Huang 2008], presented the design of
fuzzy PID controllers using modified triangular membership functions. The modified triangular
membership function improved the performance according to knowledge based reasoning.
4.4 FLC design using Mamdani’s architecture
FLC have been developed and extensively used to improve or to replace conventional
control techniques, because these techniques do not require a precise model. FLC is applied for
controller design in many applications. FLC has emerged as one of the most active and useful
research areas. That is why; the FLCs have been successfully applied for control of various physical
processes. Though FLCs have shown some success, but there is a significant need to evaluate their
real time performance on specific experiments. Such evaluations help to determine the performance
of the new intelligent control method and provide engineers with general guidelines on how to
apply them to more complex real-world applications [Passino, 1993; Passino, 1996; Zumberge &
Passino, 1998; Kuswadi, 2001].
There are two approaches to a fuzzy controller design: an expert approach and a control
engineering approach. In the first, the fuzzy controller structure and parameters choice are assumed
to be the responsibility of the experts. Consequently, design and performance of a fuzzy controller
depend mainly on the knowledge and experience of the experts, or intuition and professional
feeling of the designer. This dependence, which is considered far from systematic and reliable, is
the flaw of this approach. However, this approach could assist in constructing a fuzzy model or an
initial version of a fuzzy controller. The second approach supposes an application of the knowledge
of control engineering and a design of a fuzzy controller in some aspects similar to the conventional
design with the parameter’s choice, depending on the information of their influence on the
controller performance [Lee, 1990a; Lee, 1990b]. The basic assumption underlying the approach to

56
FLC proposed by E. H. Mamdani [Mamdani, 1974] is that in the absence of the explicit plan model
and/or clear statement of control design objective, informal knowledge of the operation of the given
plant can be codified in terms of if-then, or condition action, rules and form the basis for a linguistic
control strategy. The basic paradigm for FLC that has emerged following Mamdani’s original work
is a linguistic or rule base control strategy of the form -
If OA1 is – and OA2 is – and … then CA1 - is – and CA2 is –
This essentially maps the observables [OA1 OA2, …] of the given physical systems into its
controllable attributes [CA1 CA2, …]. In particular each observable is either a directly measurable
variable and/or the difference between any such variable and its associated reference value. It may
be noted that any processed value of the observable attribute [rate of change or integral] may also
be used within the premise of a rule.
There are two types of fuzzy inferencing mechanisms namely Mamdani’s and Sugeno’s.
The difference between the two lies on the consequent of fuzzy rules. Fuzzy sets are used as rules
consequent in Mamdani’s architecture and linear functions of input variables are used in Sugeno’s
architecture. Mamdani’s rule finds a greater acceptance in all universal approximates than Sugeno’s
model. Following steps are followed to compute the output from the Mamdani’s architecture -
1. Identifying input fuzzy variables
2. Identifying output fuzzy variables
3. Defining input/output fuzzy variables membership functions.
4. Combining the fuzzified input according to the fuzzy rules for establishing rule strength.
5. Determination of the consequent of the rule by combining the rule strength and the output
membership functions.
6. Computation of the final crisp value of the output variable using defuzzification methods.
4.4.1 Elements of FLC implementation

57
In FLC, a control algorithm is a coded using fuzzy statement in the block containing a
knowledgebase by taking into account the control objectives and the system behavior. The present
research work is focused on the implementation of Mamdani type fuzzy PI controllers on an
electrodynamic shaker for acceleration waveform amplitude control on waveform basis. Two FLCs
are implemented in this research. In first case, the Mamdani type FLC is developed and
implemented using the LabVIEW S/W toolbox of fuzzy logic control. This controller is
implemented for acceleration waveform amplitude control on an in-house developed
electrodynamic shaker system working in relatively narrow frequency band. The test was
performed on rigid load. In other case the FLC is developed by using the basic building blocks of
the LabVIEW S/W programming environment. This case became more flexible as the
customization of FLC was done enabling the real time control of the elecerodynamic shaker
vibration process under consideration on single waveform basis. Following sections describe the
development of the customized FLC. It may be noted that the FLC toolkit was not preferred for this
real time application because of its heavy timing limitations imposed by the FLC toolkit. The error
in the acceleration waveform amplitude and its change is minimized to achieve the control
objectives. These two variables form the input to the developed FLC module. The output of the
FLC is the incremental controller output. Fuzzy PI controller is chosen and designed on the basis of
the classical discrete PI controller structure from which the FLC law is derived [Lee, 1990a; Lee,
1990b].
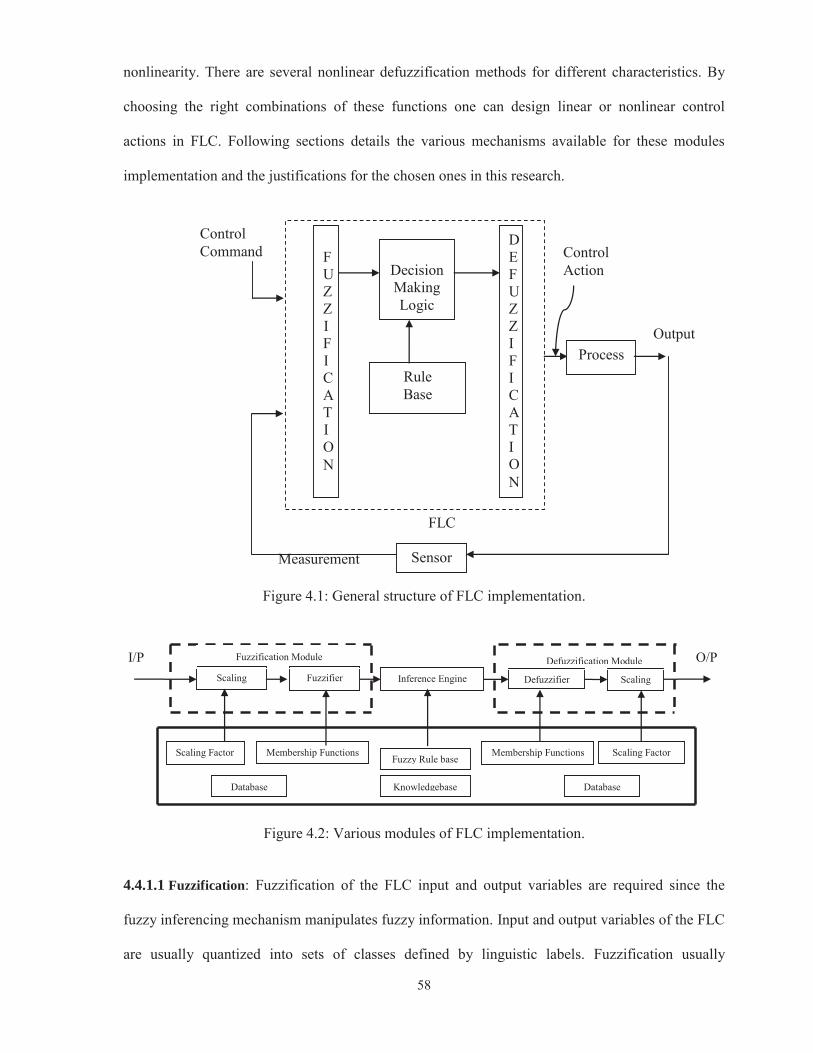
Figure 4.1 shows a general closed loop FLC implementation block diagram. Figure 4.2
shows various modules required for FLC implementation. As seen in Figure 4.2 FLC
implementation essentially requires fuzzification, defuzzification, rule base and inferencing
modules. The nature and number of these variables decides the resulting nonlinearity in a FLC. The
position, shape and number of membership functions on the premise side, as well as nonlinear input
scaling causes nonlinear characteristics. Even the rules themselves can express a nonlinear control
strategy. The inference engine making use of AND and OR connectives can also lead to
58
nonlinearity. There are several nonlinear defuzzification methods for different characteristics. By
choosing the right combinations of these functions one can design linear or nonlinear control
actions in FLC. Following sections details the various mechanisms available for these modules
implementation and the justifications for the chosen ones in this research.
Figure 4.1: General structure of FLC implementation.
Figure 4.2: Various modules of FLC implementation.
4.4.1.1 Fuzzification: Fuzzification of the FLC input and output variables are required since the
fuzzy inferencing mechanism manipulates fuzzy information. Input and output variables of the FLC
are usually quantized into sets of classes defined by linguistic labels. Fuzzification usually
F U Z Z I F I C A T I O N
D E F U Z Z I F I C A T I O N
Decision Making Logic
Rule Base
Process
Sensor
FLC
Measurement
Control Action
Output
Control Command
Fuzzifier Scaling Scaling Defuzzifier Inference Engine
Knowledgebase Database Database
Fuzzy Rule base Membership Functions Scaling Factor Membership Functions Scaling Factor
Fuzzification Module Defuzzification Module I/P O/P

59
transforms crisp normalized input data into membership grade of fuzzy sets defined on the
normalized Universe Of Discourse (UOD) of fuzzy variables and viewed as a generalization of the
concept of an ordinary set. So, fuzzification essentially means reading the grade of membership of
the crisp input value against the fuzzy set. However, since there can be overlap between two or
more fuzzy sets, so a crisp data might yield two or more membership grades. The input fuzzy sets
need to be so many in number and so positioned that (i) they cover the entire normalized UOD so
that any value of input variable will produce at least one nonzero membership value (as otherwise
no rule will be invoked form the control rule base), (ii) any two adjacent membership functions
overlap once and to such an extent that only two nonzero membership values are yielded by
fuzzification of each input variable.
The membership functions used in fuzzification process play a crucial role in the final
performance of an FLC. The choice of the membership function has a strong influence on the
control effect [Sun & Lin, 2002; Bagis, 2003]. Four types of membership functions are normally
used in most circumstances in control: Trapezoidal, Triangular [a case of trapezoidal], Gaussian
and Bell-shaped. Among these four, the first two are widely used. All these fuzzy sets are
continuous, normal and convex. A fuzzy set is said to be normal if its height is one. A fuzzy set is
said to be continuous if its membership function is continuous. The convexity property of fuzzy sets
is viewed as a generalization of the classical concepts of crisp sets. The number of fuzzy sets may
differ problem to problem under consideration. A large number of fuzzy variables give precise
modeling but introduce computational delay complexities. So, one need to have a tradeoff for the
timing aspect considering the number of input and output variables and number of resulting rules.
Membership functions characterize the fuzziness in fuzzy sets. However, the shape of the
membership functions, used to describe the fuzziness, has very few restrictions indeed. It might be
claimed that the rules used to describe the fuzziness are also fuzzy. Just as there are an infinite
number of ways to characterize fuzziness, there are infinite numbers of ways to graphically depict
the membership functions that describe fuzziness. Although the selection of membership function is
60
subjective, it cannot be arbitrary; it should be plausible.
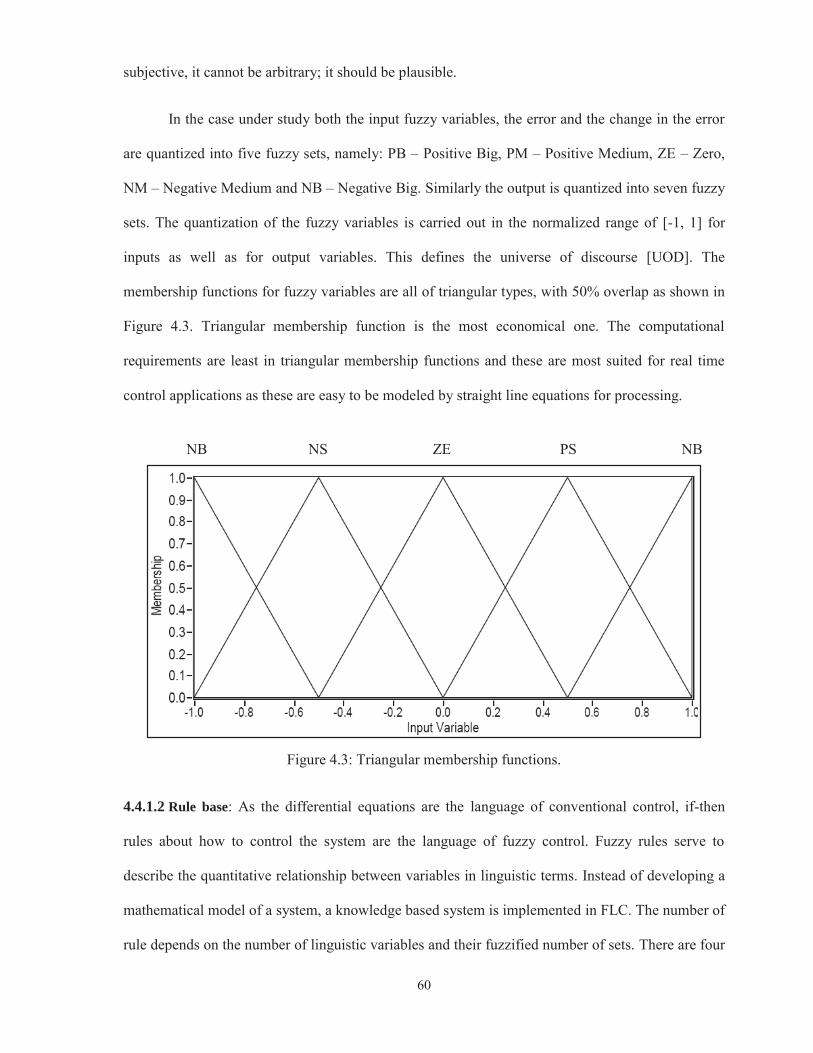
In the case under study both the input fuzzy variables, the error and the change in the error
are quantized into five fuzzy sets, namely: PB – Positive Big, PM – Positive Medium, ZE – Zero,
NM – Negative Medium and NB – Negative Big. Similarly the output is quantized into seven fuzzy
sets. The quantization of the fuzzy variables is carried out in the normalized range of [-1, 1] for
inputs as well as for output variables. This defines the universe of discourse [UOD]. The
membership functions for fuzzy variables are all of triangular types, with 50% overlap as shown in
Figure 4.3. Triangular membership function is the most economical one. The computational
requirements are least in triangular membership functions and these are most suited for real time
control applications as these are easy to be modeled by straight line equations for processing.
Figure 4.3: Triangular membership functions.
4.4.1.2 Rule base: As the differential equations are the language of conventional control, if-then
rules about how to control the system are the language of fuzzy control. Fuzzy rules serve to
describe the quantitative relationship between variables in linguistic terms. Instead of developing a
mathematical model of a system, a knowledge based system is implemented in FLC. The number of
rule depends on the number of linguistic variables and their fuzzified number of sets. There are four
NB NS ZE PS NB

61
principle methods used for rule base generation, (i) control engineering knowledge, (2) modeling
the operator behavior, (iii) fuzzy modeling, and (iv) self learning fuzzy controller. The first two
approaches are considered as heuristic methods while the other two are deterministic methods. The
heuristic method was used by Mamdani and the deterministic method by Tagaki and Sugeno.
For two input fuzzy variables, as the case under study, the rule base for FLC can be
imagined to be a two dimensional matrix. The rows represent the various linguistic values that a
variable can have and columns indicate the various values of another variable. The entries in this
matrix are the control action that has to be taken is described in the linguistic terms. The control
action is calculated based upon the experimentally observed process reaction [Lee, 1990a; Lee,
1990b]. The antecedent pairs in the rule structure are connected by a logical ‘AND’ operation
which is considered here as algebraic product triangular norm. It is chosen as it takes into account
the effect of all the inputs in comparison to the other methods of inference. It may be noticed that
the resulting control rules are non-linear as the output fuzzy sets are not linearly related to the input
fuzzy sets.
For the case under consideration, two input fuzzy variables of five membership functions
each and similarly seven membership functions for output variable. The rule base matrix will have
5x5 = 25 entries, considering all the possible combinations of inputs. It leads to 25 numbers of the
rules. Furthermore, each input variable will have two linguistic terms associated for each value of
the normalized input and there are two input variables leading to four adjacent rules getting fired in
every combination. Firing of four adjacent rules leads to total 16 formulas for FLC implementation.
4.4.1.3 Fuzzy inference mechanism: The basic function of the fuzzy inference engine is to compute
the overall value of the control output variable based on the individual contribution of each rule in
the rule base. In a fuzzy inference engine, the control actions are encoded by means of fuzzy
inference rules. The approximate fuzzy sets are defined on the domains of involved variables, and
fuzzy logic operators and inference methods are formalized in computational terms. The inference
62
method for FLC can be categorized into two groups direct and indirect. The direct inferencing
determines directly the output from the knowledge base and on line data by min-max operation.
The firing of a set of rules via the operation composition is called composition based inference. In
this case, the Fuzzy Relations [FRs] representing the meanings of each individual fuzzy rule are
aggregated into one FR describing the meaning of overall sets of fuzzy rules. Direct method is
normally used in FLC design as it is simple and offers use of min(t-norm)–max(t-conorm) operator.
This operator is called Mamdani type inference. For the present research work, Mamdani minimum
inference mechanism and product t-norms have been used. The differences in using the various
implication techniques are described in [Smith & Shen, 1998].
4.4.1.4 Defuzzification: This module converts the set of modified controller output value into a
single crisp value. This is required as the actuator cannot operate upon the fuzzy commands, rather
requires crisp inputs for their operation. There are many procedures outlined in the literature
[Thomas, 1997] for defuzzification which are centre of gravity/area, centre of mass, centre of
largest area, first of maxima, middle of maxima, and height. Of these, the Centre Of Gravity (COG)
as shown in Eq. [4.1] is the most efficient for the fact that it gives a defuzzified output which
conveys the real meaning of the action that has to be taken at that instant. Here is the
membership grade and x is the fuzzy variable. In the present work, the center of gravity
defuzzification method is used to defuzzify composite fuzzy controller output into a crisp control
signal [Tang, Man, Chen & Kwong, 2001].
x* = [4.1]
4.4.1.5 FLC tuning: The tuning of a fuzzy controller is often compared to the tuning of a PID,
stressing the large number of the fuzzy controller parameters, compared to the three gains of a PID.
In the experiment conducted the tuning was done manually by optimizing the close loop step
response for minimum overshoot and faster response at some sample frequencies [Li, 1997; Preitl,
1999].

63
4.4.2 Fuzzy PI controller structure
A conventional PI controller follows the following control low:
(t) = [e(t) + (t)dt] [4.2]
where is the proportional constant of PI controller, I is the integral time constant, e(t) is error
in the acceleration waveform amplitude, e(t) = r(t) – y(t), r(t) is the desired acceleration amplitude,
y(t) is the output obtained from the shaker process and (t) is the output of the PI controller. On
differentiating Eq. [4.1] and putting into a discrete form,
: ; = >
: ; + s
τ e(t)]
In a discrete form, for a given sampling period Ts, the above equation can be written as: > ?F > Fs ? = >
> ?F > Fs? + s
τ e[k]],
or, Δ [k] = >Δe[k] + τ
e[k]],
or, ΔuPI[k] = KCΔe[k] + K’Ce[k] [4.3]
where, ΔuPI[k] = > ?F > F s?
and, Δe[k] = e > ?F > F s?
KC is defined as the gain P
and, K’C = KC τ is the gain I.
The denormalized output of fuzzy controller is given by Δ [k], where, gain KUPI
denormalizes the normalized incremental fuzzy controller output, Δ [k]. The controlled output is
thus obtained as,
[k] = [k-1] + [k] [4.4]
In this work the control action is implemented on the acceleration waveform basis and
hence the amplitude of the excitation signal to the power amplifier is controlled to achieve the
desired objective. To implement the proposed acceleration waveform amplitude fuzzy PI controller
64
Eq. [4.2], two inputs namely the instantaneous acceleration waveform amplitude error e[k] and its
change of the error Δe[k] are required and the output of the FLC is the incremental change in the
controller output of excitation waveform to be fed to the power amplifier. Increasing the number of
inputs to FLC would require more processing time for the larger rule base size and hence would
force a constraint on the implementable update rate in acceleration amplitude control. Small
computational delays also enable the shaker control at high frequencies. In order to make the
computations faster a customized fuzzy PI controller was chosen rather than other combinations
such as fuzzy PI + fuzzy PD or fuzzy PID itself [Carvajal, Chen & Ogmen, 2000]. A physical
meaning of the parameters for the fuzzy PI controller remains the same like that for the classical PI
controller. The controller takes two fuzzy variable e[k] and Δe[k] and it gives an incremental
control action ΔuPI.
4.4.3 Fuzzy PI controller outputs
Let e and Δe be the error and change of error of the acceleration amplitude respectively.
Both of these parameters are normalized in the range of [-1, 1] and are defined by five linguistic
values, namely, PB – Positive Big, PM – Positive Medium, ZE – Zero, NM – Negative Medium
and NB – Negative Big. The incremental change in the controller output, ΔuPI is also normalized in
the range of [-1, 1] and is defined by seven membership functions, namely, PB – Positive Big, PM
– Positive Medium, PS - Positive Small, ZE – Zero, NS – Negative Small, NM – Negative Medium
and NB – Negative Big. Figure 4.4 and Figure 4.5 show the membership functions and their fuzzy
terms respectively. For the fuzzy terms membership grade is obtained from these functions and is
utilized further to obtain the final controller output. For achieving a smooth acceleration control the
overshoot has been minimized along with the faster response in terms of rise time and settling time.
Following are the various possible 25 combinations of the two inputs with five variables each with
their resulting output implications. Table 4.1 shows the tabular representation of these rule bases.
Following 25 entries show the designed controller output for various input combinations. It may be

65
noted that the resulting controller output is in the incremental from.
Figure 4.4: I/P membership functions.
Figure 4.5: O/P membership functions.
-2x+2
0.0
1.0
μ
-2x
NL NS ZE PS PL
-1.0 -0.5 0.0 0.5 1.0
-2x-1 -2x+1
2x+2 2x+1 2x 2x-1
μ
NL NM NS ZE PS PM PL
-1.0 -0.67 -0.33 0.0 0.33 0.67 1.0
-3x+3-3x-1 -3x -3x+1 -3x+2-3x-2
3x-1 3x+2 3x+1 3x 3x-2 3x+3
0.0
1.0

66
Table 4.1: Rule Base for Fuzzy PI Controller Change of error (Δe)
error(e)
NB NM ZE PM PB
NB NL NM NM NS ZE
NM NM NS NS ZE PS
ZE NM NS ZE PS PM
PM NS ZE PS PS PM
PB ZE PS PM PM PL
13. e = ZE. AND. Δe = ZE → ΔuPI = ZE3
14. e = ZE. AND. Δe = PS → ΔuPI = PS2
15. e = ZE. AND. Δe = PL → ΔuPI = PM1
16. e = PS. AND. Δe = NL → ΔuPI = NS5
17. e = PS. AND. Δe = NS → ΔuPI = ZE4
18. e = PS. AND. Δe = ZE → ΔuPI = PS3
19. e = PS. AND. Δe = PS → ΔuPI = PS4
20. e = PS. AND. Δe = PL → ΔuPI = PM2
21. e = PL. AND. Δe = NL → ΔuPI = ZE5
22. e = PL. AND. Δe = NS → ΔuPI = PS5
23. e = PL. AND. Δe = ZE → ΔuPI = PM3
24. e = PL. AND. Δe = PS → ΔuPI = PM4
25. e = PL. AND. Δe = PL → ΔuPI = PL
1. e = NL. AND. Δe = NL → ΔuPI = NL
2. e = NL. AND. Δe = NS → ΔuPI = NM1
3. e = NL. AND. Δe = ZE → ΔuPI = NM2
4. e = NL. AND. Δe = PS → ΔuPI = NS1
5. e = NL. AND. Δe = PL → ΔuPI = ZE1
6. e = NS. AND. Δe = NL → ΔuPI = NM3
7. e = NS. AND. Δe = NS → ΔuPI = NS2
8. e = NS. AND. Δe = ZE → ΔuPI = NS3
9. e = NS. AND. Δe = PS → ΔuPI = ZE2
10. e = NS. AND. Δe = PL → ΔuPI = PS1
11. e = ZE. AND. Δe = NL → ΔuPI = NM4
12. e = ZE. AND. Δe = NS → ΔuPI = NS4
67
Based on the combinations of the values of the two input variables, e and Δe, the
membership grade values and ` are evaluated. As the membership function is triangular in
nature two adjacent linguistic terms are sufficient to completely describe the associated
membership grades for a given fuzzy variable. Based on the normalized values of the fuzzy variable
e and Δe, a perpendicular is drawn from the x-axis upward. The membership grades of the adjacent
linguistic terms are computed from the points of intersections of the perpendicular with the
triangular membership functions. The five linguistic terms, each for two inputs fuzzy variables, lead
to 25 possible combinations. Furthermore, as the two membership grades are required for each
input value, four adjacent rules may get fired in any combination using the product t-norms for
inferencing. This combination of four adjacent rules firing at one time, out of total 25 rules, leads to
16 output possible sets of the controller output to be computed which are analyzed and presented
below.
Case 1: -1.0 ≤ e ≤ -0.5 and -1.0 ≤ Δe ≤ -0.5
[̀NL] = -2e-1 [̀NS] = 2e+2
` [NL] = -2Δe-1 ` [NS] = 2Δe+2
Using product t-norms for inferencing the membership values of the four fuzzy output membership
functions are computed. The incremental controller output is computed using COG method of
defuzzification. All the 16 cases are accordingly worked out.
[̀NL] = [̀NL]. ` [NL] [̀NM1] = [̀NL]. ` [NS]
[̀NM3] = [̀NS]. ` [NL] [̀NS2] = [̀NS]. ` [NS]
ΔuPI = - swFxJ: ;F J> ?t
{ctFJ> ?gJ: ;ktFJ: ;oE
v
uJ> u?:tFJ> u;?E
v
uJ> s?:tFJ> s;?E
t
uJ> t?:tFJ> t;?
J: ;ktFJ: ;oE tJ> u?:tFJ> u;?E tJ> s?ktFJ: s;oE tJ> t?>tFJ> t??
Case 2: -1.0 ≤ e ≤ -0.5 and -0.5 ≤ Δe ≤ 0.0
[̀NL] = -2e-1 [̀NS] = 2e+2
` [NS] = -2Δe ` [ZE] = 2Δe+1
68
[NM1] = [NL]. [NS] [NM2] = [NL]. [ZE]
[NS2] = [NS]. [NS] [NS3] = [NS]. [ZE]
ΔuPI = -
Case 3: -1.0 ≤ e ≤ -0.5 and 0.0 ≤ Δe ≤ 0.5
[NL] = -2e-1 [NS] = 2e+2
[ZE] = -2Δe+1 [PS] = 2Δe
[NM2] = [NL]. [ZE] [NS1] = [NL]. [PS]
[NS3] = [NS]. [ZE] [ZE2] = [NS]. [PS]
ΔuPI = -
Case 4: -1.0 ≤ e ≤ -0.5 and 0.5 ≤ Δe ≤ 1.0
[NL] = -2e-1 [NS] = 2e+2
[PS] = -2Δe+2 [PL] = 2Δe-1
[NS1] = [NL]. [PS] [ZE1] = [NL]. [PL]
[ZE2] = [NS]. [PS] [PS1] = [NS]. [PL]
ΔuPI =
Case 5: -0.5≤ e ≤ 0.0 and -1.0 ≤ Δe ≤ -0.5
[NS] = -2e [ZE] = 2e+1
[NL] = -2Δe-1 [NS] = 2Δe+2
[NM3] = [NS]. [NL] [NS2] = [NS]. [NS]
[NM4] = [ZE]. [NL] [NS4] = [ZE]. [NS]
ΔuPI = -
Case 6: -0.5≤ e ≤ 0.0 and -0.5 ≤ Δe ≤ 0.0
[NS] = -2e [ZE] = 2e+1
[NS] = -2Δe [ZE] = 2Δe+1
69
[NS2] = [NS]. [NS] [NS3] = [NS]. [ZE]
[NS4] = [ZE]. [NS] [ZE3] = [ZE]. [ZE]
ΔuPI = -
Case 7: -0.5≤ e ≤ 0.0 and 0.0 ≤ Δe ≤ 0.5
[NS] = -2e [ZE] = 2e+1
[ZE] = -2Δe+1 [PS] = 2Δe
[NS3] = [NS] . [ZE] [ZE2] = [NS]. [PS]
[ZE3] = [ZE]. [ZE] [PS2] = [ZE]. [PS]
ΔuPI =
Case 8: -0.5≤ e ≤ 0.0 and 0.5 ≤ Δe ≤ 1.0
[NS] = -2e [ZE] = 2e+1
[PS] = -2Δe+2 [PL] = 2Δe-1
[ZE2] = [NS]. [PS] [PS1] = [NS]. [PL]
[PS2] = [ZE]. [PS] [PM1] = [ZE]. [PL]
ΔuPI =
Case 9: 0.0≤ e ≤ 0.5 and -1.0≤ Δe ≤ -0.5
[ZE] = -2e+1 [PS] = 2e
[NS] = 2Δe+2 [NL] = -2Δe-1
[NM4] = [ZE]. [NL] [NS4] = [ZE]. [NS]
[NS5] = [PS]. [NL] [ZE4] = [PS]. [NS]
ΔuPI = -
Case 10: 0.0≤ e ≤ 0.5 and -0.5≤ Δe ≤ 0.0
[ZE] = -2e+1 [PS] = 2e
[NS] = -2Δe [ZE] = 2Δe+1
70
[NS4] = [ZE]. [NS] [ZE3] = [ZE]. [ZE]
[ZE4] = [PS]. [NS] [PS3] = [PS]. [ZE]
ΔuPI =
Case 11: 0.0≤ e ≤ 0.5 and 0.0≤ Δe ≤ 0.5
[ZE] = -2e+1 [PS] = 2e
[ZE] = -2Δe+1 [PS] = 2Δe
[ZE3] = [ZE]. [ZE] [PS2] = [ZE]. [PS]
[PS3] = [PS]. [ZE] [PS4] = [PS]. [PS]
ΔuPI =
Case 12: 0.0≤ e ≤ 0.5 and 0.5≤ Δe ≤ 1.0
[ZE] = -2e+1 [PS] = 2e
[PS] = -2Δe+2 [PL] = 2Δe-1
[PS2] = [ZE]. [PS] [PM1] = [ZE]. [PL]
[PS4] = [PS]. [PS] [PM2] = [PS]. [PL]
ΔuPI =
Case 13: 0.5≤ e ≤ 1.0 and -1.0≤ Δe ≤ -0.5
[PS] = -2e+2 [PL] = 2e-1
[NL] = -2Δe-1 [NS] = 2Δe+2
[NS5] = [PS]. [NL] [ZE4] = [PS]. [NS]
[ZE5] = [PL]. [NL] [PS5] = [PL]. [NS]
ΔuPI =

71
Case 14: 0.5≤ e ≤ 1.0 and -0.5≤ Δe ≤ 0.0
[PS] = -2e+2 [PL] = 2e-1
[NS] = -2Δe [ZE] = 2Δe+1
[ZE4] = [PS]. [NS] [PS3] = [PS]. [ZE]
[PS5] = [PL]. [NS] [PM3] = [PL]. [ZE]
ΔuPI =
Case 15: 0.5≤ e ≤ 1.0 and 0.0≤ Δe ≤ 0.5
[PS] = -2e+2 [PL] = 2e-1
[ZE] = -2Δe+1 [PS] = 2Δe
[PS3] = [PS]. [ZE] [PS4] = [PS]. [PS]
[PM3] = [PL]. [ZE] [PM4] = [PL]. [PS]
ΔuPI =
Case 16: 0.5≤ e ≤ 1.0 and 0.5≤ Δe ≤ 1.0
[PS] = -2e+2 [PL] = 2e-1
[PS] = -2Δe+2 [PL] = 2Δe-1
[PS4] = [PS]. [PS] [PM2] = [PS]. [PL]
[PM4] = [PL]. [PS] [PL] = [PL]. [PL]
ΔuPI =
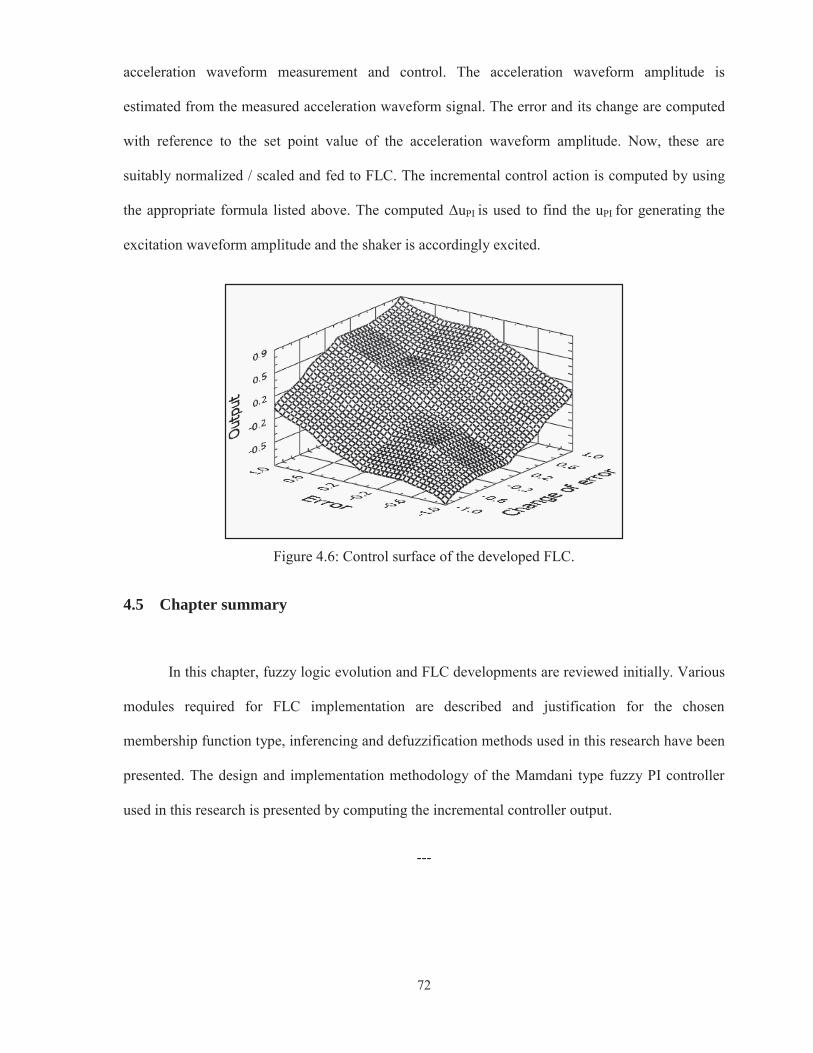
To observe the nature of available control actions, in the entire UOD, a three dimensional
plot is generated by varying the two FLC inputs and recording the incremental FLC output. Figure
4.6 shows the resulting fuzzy control surface. As seen clearly, it forms a non-linear control action.
For implementing this controller in real time a LabVIEW code is developed for the formulas
worked out as above and integrated with the Data Acquisition (DAQ) module of the software for
72
acceleration waveform measurement and control. The acceleration waveform amplitude is
estimated from the measured acceleration waveform signal. The error and its change are computed
with reference to the set point value of the acceleration waveform amplitude. Now, these are
suitably normalized / scaled and fed to FLC. The incremental control action is computed by using
the appropriate formula listed above. The computed ΔuPI is used to find the uPI for generating the
excitation waveform amplitude and the shaker is accordingly excited.
Figure 4.6: Control surface of the developed FLC.
4.5 Chapter summary
In this chapter, fuzzy logic evolution and FLC developments are reviewed initially. Various
modules required for FLC implementation are described and justification for the chosen
membership function type, inferencing and defuzzification methods used in this research have been
presented. The design and implementation methodology of the Mamdani type fuzzy PI controller
used in this research is presented by computing the incremental controller output.
---
SECTION - I
Complex Vibrations Measurement and Presentation