g1300524 als amaldi10 v1 - dcc-llo.ligo.org · the$arm$length$stabilizaon$system$...
TRANSCRIPT

The Arm Length Stabiliza2on System for Advanced LIGO Lock Acquis2on
Adam Mullavey Louisiana State University
for the LIGO ISC
LIGO-‐G1300524 Amaldi10/GR20 Conference 7/9/2013

Acknowledgments
• LIGO Hanford – Daniel Sigg, Keita Kawabe, Kiwamu Izumi, Sheila Dwyer
• LIGO Caltech – Rana Adhikari, Koji Arai, Aidan Brooks, David Yeaton-‐Massey
• LIGO MIT – Peter Fritschel, MaX Evans, Lisa BarsoZ, John Miller
• The Australian Na2onal University – Bram Slagmolen, Daniel Shaddock, David McClelland,
• Other – Stefan Ballmer (Syracuse University), Alexa Staley (Columbia
University), Alberto Stochino
7/9/13 The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 2

Lock Acquisi2on
7/9/13 The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 3
Power RecyclingMirror
BeamSplitter
Input Test Mass
X
End Test Mass
X
Input Test Mass
Y
EndTest Mass
Y
Signal RecyclingMirror
Pre-StabilizedLaser
Five Degrees Of Freedom To Sense and Control: • DARM (Differen2al ARM) • CARM (Common ARM) • MICH (MICHelson) • PRCL (Power Recycling Cavity Length) • SRCL (Signal Recycling Cavity Length)

Difficul2es
• Coupled Free Swinging Cavi2es – Sensing matrix in a state of flux
7/9/13 The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 4
S1S2•
•
SN
!
"
######
$
%
&&&&&&
=
!
"
####
$
%
&&&&
DARMCARMMICHPRCLSRCL
!
"
######
$
%
&&&&&&
Dynamic Sensing Matrix
• Narrow locking range – Cavity swinging too fast – Actuators too weak to catch lock

Lock Acquisi2on
• Simplify the problem by decoupling CARM and DARM, using independent sensors.
7/9/13 The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 5
• Introducing the Arm Length Stabiliza2on system
ALSDARMALSCARMS1S2•
SN
!
"
#######
$
%
&&&&&&&
=
1 0 0 0 00 1 0 0 00 0 M11 M12 M13
0 0 M21 M22 M23
• • • • •0 0 MN1 MN1 MN 3
!
"
########
$
%
&&&&&&&&
DARMCARMMICHPRCLSRCL
!
"
######
$
%
&&&&&&

Arm Length Stabiliza2on
7/9/13 The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 6
Power RecyclingMirror
BS
Input Test Mass
X
End Test Mass
X
Input Test Mass
Y
EndTest Mass
Y
Signal RecyclingMirror
Pre-StabilizedLaser
ALS CommX-PSL Inference
ALS DiffX-Y Inference
AuxiliaryLaser
AuxiliaryLaser
SecondHarmonicGenerator
• Uses Auxiliary Lasers locked to the Arm Cavi2es
• TransmiXed Aux light combined with doubled PSL to form a heterodyne signals

End Sta2on
The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 7/9/13 7
EndTest Mass
Auxiliary Laser
Servo
PhaseModulator
PhaseFrequency
Discriminator
40MHz
24MHz
PSL Light viaOptical Fiber
Laser Locking LoopUGF~30kHz
PDH LoopUGF~10kHz
Servo
• Auxiliary Laser – Dual Wavelength (532nm and 1064nm) – First Locked to PSL – Locked to Arm Cavity, via PDH technique and fed back to 40MHz VCO

ALS -‐ Corner Sta2on
The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 7/9/13 8
ALS Diff(X-Y Inference)
Input Mode Cleaner
Power RecyclingMirror
BeamSplitter
InputTest Mass
X
ALS Comm(X-PSL Inference)
PhaseModulator
ServoPhase
FrequencyDiscriminator
PhaseFrequency
Discriminator
Pre-Stabilised Laser
Second Harmonic Generator
80MHz +Offset
InputTest Mass
Y
Servo
160MHz +Offset
Differentially to End
Test Masses
• ALS Comm – fed back to PSL frequency (via IMC) – Offset injected into loop for tuning
of resonance
• ALS Diff – fed back differen2ally to ETMs

Prototype Experiments
• Couple of experiments to test out ALS technique on single cavity: – ANU Benchtop Experiment ([1] Mullavey et. Al) – Caltech 40m Experiment ([2] Izumi et. al)
The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 7/9/13 9

ANU Benchtop Experiment
7/9/13 The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 10
Tip Tilt 2
15MHz
10MHz
Tip Tilt Mirror Control (CDS)
ALSgain
IR PDHgain
ADC
ADC
DAC
DAC
DAC
ADCAuxiliary LaserLocking FPGA
Relative FrequencyMeasurement FPGA
FrequencyO!set
AuxiliaryLaser
532nm1064nm
Tip Tilt 1
CavityController
ADC
EOM
EOM
ScienceLaser
1064nm
• 1.3m cavity • Suspended mirrors • Beatnote from
1064nm, not 532nm • Feedback to arm
length not Science Laser

ANU Bench-‐top Results
The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 7/9/13 11
Mullavey et al
30pm RMS, approx 1/30th cavity line-‐width
-20 0 20 40 60 80 100 120 1400
0.5
1
Pow
er (a
rb)
-20 0 20 40 60 80 100 120 140-1
0
1
Sign
al (a
rb)
-20 0 20 40 60 80 100 120 1400
0.5
1
Frequency Offset (MHz)
Pow
er (a
rb)
Tuneable over full free spectral range

Caltech 40m Experiment
• 40m cavity • Beatnote from 532nm
• Feedback to arm length
7/9/13 The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 12

Caltech 40m Results
The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 7/9/13 13
Izumi et. al. 24pm RMS
24 pm RMS
Tuning On and Off Resonance

Progress at the Sites
• Hanford – Y sta2on ALS installed and commissioned (One Arm Test)
– Half Interferometer (HIFO) test, i.e. effec2vely ALS-‐Comm loop
• Livingston – Basically nothing yet (wai2ng for an arm)
The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 7/9/13 14
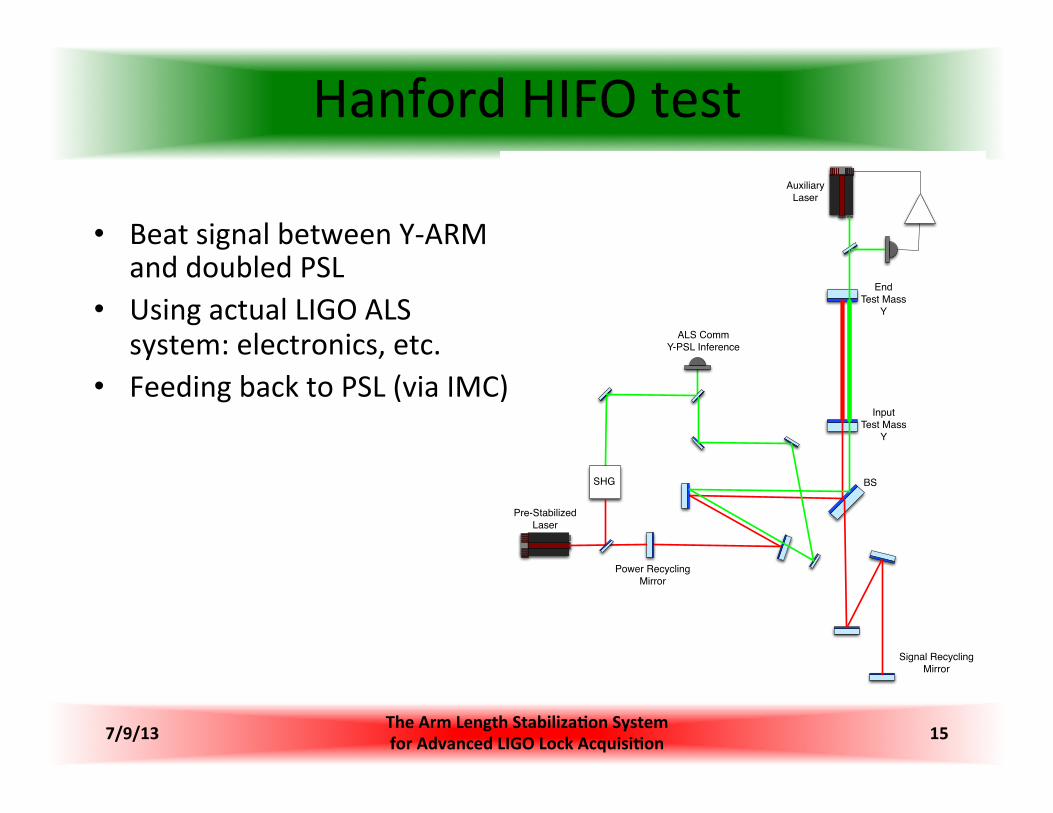
Power RecyclingMirror
BS
Input Test Mass
Y
EndTest Mass
Y
Signal RecyclingMirror
Pre-StabilizedLaser
ALS CommY-PSL Inference
AuxiliaryLaser
SHG
Hanford HIFO test
• Beat signal between Y-‐ARM and doubled PSL
• Using actual LIGO ALS system: electronics, etc.
• Feeding back to PSL (via IMC)
The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 7/9/13 15

HIFO Residual Noise
7/9/13 The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 16
Frequency (Hz)-210 -110 1 10 210
)1/
2Fr
eque
ncy
Fluc
tuat
ion
(Hz/
Hz
-110
1
10
HIFO-Y Frequency Noise
T0=29/06/2013 04:00:00 Avg=10/Bin=11L BW=0.0117178
IR transmitted lightRMS
HIFO-Y Frequency Noise
1/10 the linewidth of the arm cavity

Future
• Hanford – Con2nue Noise Hun2ng, < CARM linewidth (100 2mes smaller than Arm Linewidth)
– HIFO X (soon) – Full IFO (May 2014)
• Livingston – HIFO X (October 2013) – Full IFO (February 2014)
The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 7/9/13 17
References
7/9/13 The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 18
[1] Mullavey et. al, Op2cs Express, Vol 20, Issue 1, pp 81-‐89 (2012)
[2] Izumi et. al, JOSA A, Vol. 29, Issue 10, pp. 2092-‐2103 (2012)

Backup Slides
7/9/13 The Arm Length Stabiliza7on System for Advanced LIGO Lock Acquisi7on 19