geometry with...
TRANSCRIPT


Geometry with Trigonometry

This page intentionally left blank

Geometry with Trigonometry
2nd Edition
“All things stand by proportion.” George Puttenham (1529–1590)
“Mathematics possesses not only truth, but supreme beauty – a beauty cold and austere like that of sculpture, and capable of stern
perfection, such as only great art can show.” Bertrand Russell in The Principles of Mathematics (1872–1970)
Patrick D. Barry Professor Emeritus of Mathematics, School of Mathematical Sciences, University College, Cork.

Woodhead Publishing is an imprint of Elsevier 80 High Street, Sawston, Cambridge, CB22 3HJ, UK 225 Wyman Street, Waltham, MA 02451, USA Langford Lane, Kidlington, OX5 1GB, UK
Copyright © 2016 Elsevier Ltd. All rights reserved.
No part of this publication may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying, recording, or any information storage and retrieval system, without permission in writing from the publisher. Details on how to seek permission, further information about the Publisher’s permissions policies and our arrangements with organizations such as the Copyright Clearance Center and the Copyright Licensing Agency, can be found at our website: www.elsevier.com/permissions.
This book and the individual contributions contained in it are protected under copyright by the Publisher (other than as may be noted herein).
Notices Knowledge and best practice in this field are constantly changing. As new research and experience broaden our understanding, changes in research methods, professional practices, or medical treatment may become necessary.
Practitioners and researchers must always rely on their own experience and knowledge in evaluating and using any information, methods, compounds, or experiments described herein. In using such information or methods they should be mindful of their own safety and the safety of others, including parties for whom they have a professional responsibility.
To the fullest extent of the law, neither the Publisher nor the authors, contributors, or editors, assume any liability for any injury and/or damage to persons or property as a matter of products liability, negligence or otherwise, or from any use or operation of any methods, products, instructions, or ideas contained in the material herein.
ISBN: 978-0-12-805066-8
For information on all Woodhead Publishing Publications visit our website at http://store.elsevier.com/
British Library Cataloguing in Publication Data A catalogue record for this book is available from the British Library
Library of Congress Cataloging-in-Publication Data A catalog record for this book is available from the Library of Congress
First Published by Horwood Publishing Limited, 2001Reprinted by Woodhead Publishing Limited, 2014 © P. D. Barry, 2001, 2014.

To my late wife Fran, my children Conor, Una and Brian, and my severalgrandchildren

This page intentionally left blank

Contents
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 Preliminaries 11.1 Historical note . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Note on deductive reasoning . . . . . . . . . . . . . . . . . . . . . . 31.2.1 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.2 Proof . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Euclid’s The Elements . . . . . . . . . . . . . . . . . . . . . . . . . 41.3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3.2 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3.3 Postulates and common notions . . . . . . . . . . . . . . . . . . . . 61.3.4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.3.5 Congruence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.3.6 Quantities or magnitudes . . . . . . . . . . . . . . . . . . . . . . . 81.4 Our approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4.1 Type of course . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4.2 Need for preparation . . . . . . . . . . . . . . . . . . . . . . . . . . 91.5 Revision of geometrical concepts . . . . . . . . . . . . . . . . . . . 101.5.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.5.2 The basic shapes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.5.3 Distance; degree-measure of an angle . . . . . . . . . . . . . . . . . 151.5.4 Our treatment of congruence . . . . . . . . . . . . . . . . . . . . . 171.5.5 Parallel lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.6 Pre-requisites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.6.1 Set notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.6.2 Classical algebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.6.3 Other algebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.6.4 Distinctive property of real numbers among fields . . . . . . . . . . 20
2 Basic shapes of geometry 212.1 Lines, segments and half-lines . . . . . . . . . . . . . . . . . . . . . 212.1.1 Plane, points, lines . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.1.2 Natural order on a line . . . . . . . . . . . . . . . . . . . . . . . . . 222.1.3 Reciprocal orders . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.1.4 Segments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.1.5 Half-lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.2 Open and closed half-planes . . . . . . . . . . . . . . . . . . . . . . 262.2.1 Convex sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.2.2 Open half-planes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.2.3 Closed half-planes . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.3 Angle-supports, interior and exterior regions, angles . . . . . . . . . 28
About the author . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvxviixix

viii Contents
2.3.1 Angle-supports, interior regions . . . . . . . . . . . . . . . . . . . . 282.3.2 Exterior regions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.3.3 Angles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.4 Triangles and convex quadrilaterals . . . . . . . . . . . . . . . . . . 302.4.1 Terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.4.2 Triangles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.4.3 Pasch’s property, 1882 . . . . . . . . . . . . . . . . . . . . . . . . . 322.4.4 Convex quadrilaterals . . . . . . . . . . . . . . . . . . . . . . . . . 32
3 Distance; degree-measure of an angle 353.1 Distance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.1.1 Axiom for distance . . . . . . . . . . . . . . . . . . . . . . . . . . 353.1.2 Derived properties of distance . . . . . . . . . . . . . . . . . . . . . 363.2 Mid-points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.3 A ratio result . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.4 The cross-bar theorem . . . . . . . . . . . . . . . . . . . . . . . . . 403.4.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.5 Degree-measure of angles . . . . . . . . . . . . . . . . . . . . . . . 403.5.1 Axiom for degree-measure . . . . . . . . . . . . . . . . . . . . . . 403.5.2 Derived properties of degree-measure . . . . . . . . . . . . . . . . . 413.6 Mid-line of an angle-support . . . . . . . . . . . . . . . . . . . . . 443.6.1 Right-angles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.6.2 Perpendicular lines . . . . . . . . . . . . . . . . . . . . . . . . . . 443.6.3 Mid-lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.7 Degree-measure of reflex angles . . . . . . . . . . . . . . . . . . . . 463.7.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4 Congruence of triangles; parallel lines 494.1 Principles of congruence . . . . . . . . . . . . . . . . . . . . . . . 494.1.1 Congruence of triangles . . . . . . . . . . . . . . . . . . . . . . . . 494.2 Alternate angles, parallel lines . . . . . . . . . . . . . . . . . . . . . 534.2.1 Alternate angles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.2.2 Parallel lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544.3 Properties of triangles and half-planes . . . . . . . . . . . . . . . . 554.3.1 Side-angle relationships; the triangle inequality . . . . . . . . . . . 554.3.2 Properties of parallelism . . . . . . . . . . . . . . . . . . . . . . . . 564.3.3 Dropping a perpendicular . . . . . . . . . . . . . . . . . . . . . . . 564.3.4 Projection and axial symmetry . . . . . . . . . . . . . . . . . . . . 57

Contents
5 The parallel axiom; Euclidean geometry 615.1 The parallel axiom . . . . . . . . . . . . . . . . . . . . . . . . . . . 615.1.1 Uniqueness of a parallel line . . . . . . . . . . . . . . . . . . . . . 615.2 Parallelograms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625.2.1 Parallelograms and rectangles . . . . . . . . . . . . . . . . . . . . . 625.2.2 Sum of measures of wedge-angles of a triangle . . . . . . . . . . . . 635.3 Ratio results for triangles . . . . . . . . . . . . . . . . . . . . . . . 645.3.1 Lines parallel to one side-line of a triangle . . . . . . . . . . . . . . 645.3.2 Similar triangles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.4 Pythagoras’ theorem, c. 550B.C. . . . . . . . . . . . . . . . . . . . 695.4.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.5 Mid-lines and triangles . . . . . . . . . . . . . . . . . . . . . . . . 705.5.1 Harmonic ranges . . . . . . . . . . . . . . . . . . . . . . . . . . . . 705.6 Area of triangles, and convex quadrilaterals and polygons . . . . . . 725.6.1 Area of a triangle . . . . . . . . . . . . . . . . . . . . . . . . . . . 725.6.2 Area of a convex quadrilateral . . . . . . . . . . . . . . . . . . . . . 755.6.3 Area of a convex polygon . . . . . . . . . . . . . . . . . . . . . . . 75
6 Cartesian coordinates; applications 816.1 Frame of reference, Cartesian coordinates . . . . . . . . . . . . . . 816.1.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 816.2 Algebraic note on linear equations . . . . . . . . . . . . . . . . . . 856.2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 856.3 Cartesian equation of a line . . . . . . . . . . . . . . . . . . . . . . 866.3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 866.4 Parametric equations of a line . . . . . . . . . . . . . . . . . . . . . 896.4.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 896.5 Perpendicularity and parallelism of lines . . . . . . . . . . . . . . . 926.5.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 926.6 Projection and axial symmetry . . . . . . . . . . . . . . . . . . . . 936.6.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 936.6.2 Formula for area of a triangle . . . . . . . . . . . . . . . . . . . . . 946.6.3 Inequalities for closed half-planes . . . . . . . . . . . . . . . . . . . 956.7 Coordinate treatment of harmonic ranges . . . . . . . . . . . . . . . 956.7.1 New parametrisation of a line . . . . . . . . . . . . . . . . . . . . . 956.7.2 Interchange of pairs of points . . . . . . . . . . . . . . . . . . . . . 976.7.3 Distances from mid-point . . . . . . . . . . . . . . . . . . . . . . . 986.7.4 Distances from end-point . . . . . . . . . . . . . . . . . . . . . . . 986.7.5 Construction for a harmonic range . . . . . . . . . . . . . . . . . . 99
7 Circles; their basic properties 1037.1 Intersection of a line and a circle . . . . . . . . . . . . . . . . . . . 1037.1.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1037.2 Properties of circles . . . . . . . . . . . . . . . . . . . . . . . . . . 105
ix

Contents
7.2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1057.2.2 Equation of a circle . . . . . . . . . . . . . . . . . . . . . . . . . . 1067.2.3 Circle through three points . . . . . . . . . . . . . . . . . . . . . . 1067.3 Formula for mid-line of an angle-support . . . . . . . . . . . . . . . 1077.3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1077.4 Polar properties of a circle . . . . . . . . . . . . . . . . . . . . . . . 1087.4.1 Tangents from an exterior point . . . . . . . . . . . . . . . . . . . . 1087.4.2 The power property of a circle . . . . . . . . . . . . . . . . . . . . . 1097.4.3 A harmonic range . . . . . . . . . . . . . . . . . . . . . . . . . . . 1117.5 Angles standing on arcs of circles . . . . . . . . . . . . . . . . . . . 1127.5.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1127.5.2 Minor and major arcs of a circle . . . . . . . . . . . . . . . . . . . . 1147.6 Sensed distances . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1147.6.1 Sensed distance . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1147.6.2 Sensed products and a circle . . . . . . . . . . . . . . . . . . . . . . 1177.6.3 Radical axis and coaxal circles . . . . . . . . . . . . . . . . . . . . 118
8 Translations; axial symmetries; isometries 1218.1 Translations and axial symmetries . . . . . . . . . . . . . . . . . . . 1218.1.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1218.2 Isometries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1238.2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1238.2.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1278.3 Translation of frame of reference . . . . . . . . . . . . . . . . . . . 127
9 Trigonometry; cosine and sine; addition formulae 1299.1 Indicator of an angle . . . . . . . . . . . . . . . . . . . . . . . . . . 1299.1.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1299.2 Cosine and sine of an angle . . . . . . . . . . . . . . . . . . . . . . 1309.2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1309.2.2 Polar coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . 1329.2.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1339.3 Angles in standard position . . . . . . . . . . . . . . . . . . . . . . 1339.3.1 Angles in standard position . . . . . . . . . . . . . . . . . . . . . . 1339.3.2 Addition of angles . . . . . . . . . . . . . . . . . . . . . . . . . . . 1359.3.3 Modified addition of angles . . . . . . . . . . . . . . . . . . . . . . 1369.3.4 Subtraction of angles . . . . . . . . . . . . . . . . . . . . . . . . . 1389.3.5 Integer multiples of an angle . . . . . . . . . . . . . . . . . . . . . 1389.3.6 Standard multiples of a right-angle . . . . . . . . . . . . . . . . . . 1389.4 Half angles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1399.4.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1399.5 The cosine and sine rules . . . . . . . . . . . . . . . . . . . . . . . 1409.5.1 The cosine rule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1409.5.2 The sine rule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
x

Contents
9.5.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1429.5.4 The Steiner-Lehmus theorem, 1842 . . . . . . . . . . . . . . . . . . 1429.6 Cosine and sine of angles equal in magnitude . . . . . . . . . . . . . 1439.6.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
10 Complex coordinates; sensed angles; angles between lines 14510.1 Complex coordinates . . . . . . . . . . . . . . . . . . . . . . . . . 14510.1.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14510.2 Complex-valued distance . . . . . . . . . . . . . . . . . . . . . . . 14810.2.1 Complex-valued distance . . . . . . . . . . . . . . . . . . . . . . . 14810.2.2 A complex-valued trigonometric function . . . . . . . . . . . . . . . 14810.3 Rotations and axial symmetries . . . . . . . . . . . . . . . . . . . . 15010.3.1 Rotations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15010.3.2 Formula for an axial symmetry . . . . . . . . . . . . . . . . . . . . 15110.4 Sensed angles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15310.4.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15310.5 Sensed-area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15610.5.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15610.5.2 Sensed-area of a triangle . . . . . . . . . . . . . . . . . . . . . . . . 15610.5.3 A basic feature of sensed-area . . . . . . . . . . . . . . . . . . . . . 15710.5.4 An identity for sensed-area . . . . . . . . . . . . . . . . . . . . . . 15710.6 Isometries as compositions . . . . . . . . . . . . . . . . . . . . . . 15810.6.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15810.7 Orientation of a triple of non-collinear points . . . . . . . . . . . . . 16010.7.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16010.8 Sensed angles of triangles, the sine rule . . . . . . . . . . . . . . . . 16210.8.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16210.9 Some results on circles . . . . . . . . . . . . . . . . . . . . . . . . 16410.9.1 A necessary condition to lie on a circle . . . . . . . . . . . . . . . . 16410.9.2 A sufficient condition to lie on a circle . . . . . . . . . . . . . . . . 16510.9.3 Complex cross-ratio . . . . . . . . . . . . . . . . . . . . . . . . . . 16510.9.4 Ptolemy’s theorem, c. 200A.D. . . . . . . . . . . . . . . . . . . . . 16610.10 Angles between lines . . . . . . . . . . . . . . . . . . . . . . . . . 16810.10.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16810.10.2 Duo-sectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16810.10.3 Duo-angles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16910.10.4 Duo-angles in standard position . . . . . . . . . . . . . . . . . . . 16910.10.5 Addition of duo-angles in standard position . . . . . . . . . . . . . 17110.10.6 Addition formulae for tangents of duo-angles . . . . . . . . . . . . 17310.10.7 Associativity of addition of duo-angles . . . . . . . . . . . . . . . 17410.10.8 Group properties of duo-angles; sensed duo-angles . . . . . . . . . 17510.10.9 An application . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17610.11 A case of Pascal’s theorem, 1640 . . . . . . . . . . . . . . . . . . . 17610.11.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
xi

Contents
10.11.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17810.11.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
11 Vector and complex-number methods 18511.1 Equipollence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18511.1.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18511.2 Sum of couples, multiplication of a couple by a scalar . . . . . . . . 18711.2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18711.2.2 Vector space over R . . . . . . . . . . . . . . . . . . . . . . . . . . 18811.3 Scalar or dot products . . . . . . . . . . . . . . . . . . . . . . . . . 19011.3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19011.4 Components of a vector . . . . . . . . . . . . . . . . . . . . . . . . 19211.4.1 Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19211.4.2 Areal coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . 19311.4.3 Cartesian coordinates from areal coordinates . . . . . . . . . . . . . 19311.4.4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19311.4.5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19411.5 Vector methods in geometry . . . . . . . . . . . . . . . . . . . . . . 19511.5.1 Menelaus’ theorem, c. 100A.D. . . . . . . . . . . . . . . . . . . . . 19511.5.2 Ceva’s theorem and converse, 1678 A.D. . . . . . . . . . . . . . . . 19611.5.3 Desargues’ perspective theorem, 1648 A.D. . . . . . . . . . . . . . 19911.5.4 Pappus’ theorem, c. 300A.D. . . . . . . . . . . . . . . . . . . . . . 20111.5.5 Centroid of a triangle . . . . . . . . . . . . . . . . . . . . . . . . . 20311.5.6 Orthocentre of a triangle . . . . . . . . . . . . . . . . . . . . . . . . 20311.5.7 Incentre of a triangle . . . . . . . . . . . . . . . . . . . . . . . . . . 20511.6 Mobile coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . 20611.6.1 Grassmann’s supplement of a vector . . . . . . . . . . . . . . . . . 20611.6.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20711.6.3 Handling a triangle . . . . . . . . . . . . . . . . . . . . . . . . . . 20711.6.4 Circumcentre of a triangle . . . . . . . . . . . . . . . . . . . . . . . 20911.6.5 Other distinguished points for a triangle . . . . . . . . . . . . . . . 21111.6.6 Euler line of a triangle . . . . . . . . . . . . . . . . . . . . . . . . . 21511.6.7 Similar triangles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21511.6.8 Centroids of similar triangles erected on the sides of a triangle . . . . 21711.6.9 Circumcentres of similar triangles on sides of triangle . . . . . . . . 21811.6.10 Triangle with vertices the mid-points of sides of given triangle . . . 21911.6.11 The nine-point circle . . . . . . . . . . . . . . . . . . . . . . . . . 22211.6.12 Parametric equations of lines. . . . . . . . . . . . . . . . . . . . . 22511.7 Some well-known theorems . . . . . . . . . . . . . . . . . . . . . . 22611.7.1 Feuerbach’s theorem, 1822 . . . . . . . . . . . . . . . . . . . . . . 22611.7.2 The Wallace-Simson line, 1797 . . . . . . . . . . . . . . . . . . . . 22911.7.3 The incentre on the Euler line of a triangle . . . . . . . . . . . . . . 23111.7.4 Miquel’s theorem, 1838 . . . . . . . . . . . . . . . . . . . . . . . . 23211.8 Isogonal conjugates . . . . . . . . . . . . . . . . . . . . . . . . . . 234
xii

Contents xiii
11.8.1 Isogonal conjugates . . . . . . . . . . . . . . . . . . . . . . . . . . 23411.8.2 Concurrency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23511.8.3 Symmedians . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
12 Trigonometric functions in calculus 23912.1 Repeated bisection of an angle . . . . . . . . . . . . . . . . . . . . 23912.1.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23912.2 Circular functions . . . . . . . . . . . . . . . . . . . . . . . . . . . 24112.2.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24112.2.2 Definition of π . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24512.3 Derivatives of cosine and sine functions . . . . . . . . . . . . . . . . 24512.3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24512.4 Parametric equations for a circle . . . . . . . . . . . . . . . . . . . 24612.4.1 Area of a disk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24612.4.2 Length of an arc of a circle . . . . . . . . . . . . . . . . . . . . . . 24712.4.3 Radian measure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24712.5 Extension of domains of cosine and sine . . . . . . . . . . . . . . . 24812.5.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24812.5.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
Appendix; List of axioms 251
Bibliography 253
254Index

This page intentionally left blank
About the author
Paddy Barry was born in Co. Westmeath in 1934 and his family moved to Co. Cork five years later. After his secondary school education at Patrician Academy, Mallow he studied at University College, Cork from 1952 to 1957, obtaining a degree of BSc in Mathematics and Mathematical Physics in 1955 and the degree of MSc in 1957. He then did research in complex analysis under the supervision of Professor W. K. Hayman, FRS, at Imperial College of Science and Technology, London (1957–1959) for which he was awarded the degree of PhD in 1960. He took first place in the Entrance Scholarships Examination to University College, Cork in 1952 and was awarded a Travelling Studentship in Mathematical Science at the National University of Ireland in 1957. He was appointed Instructor in Mathematics at Stanford University, California in 1959–1960. Returning to University College, Cork in 1960 he made his career there, becoming Professor of Mathematics and Head of
His mathematical interests expanded in line with his extensive teaching experience. As examiner for matriculation for many years he had to keep in contact with the detail of secondary school mathematics and the present book arose from that context, as it seeks to give a thorough account of the geometry and trigonometry that is done, necessarily incompletely, at school.
Department in 1964. He has been Professor Emeritus of Mathematics there from 1999 to date. He participated in the general administration of the College, being a member of the Governing Body on a number occasions, and was the first modern Vice-President of the College from 1975 to 1977. He was also a member of the Senate of the National University of Ireland from 1977 to 1982.
University College, Cork was upgraded to National University of Ireland, Cork in 1997 and both titles are now used.

This page intentionally left blank

Preface
I have for a long time held the view that whereas university courses in algebra, num-ber systems and analysis admirably consolidate the corresponding school material,this is not the case for geometry and trigonometry. These latter topics form an im-portant core component of mathematics, as they underpin analysis in its manifoldaspects and applications in classical applied mathematics and sundry types of sci-ence and engineering, and motivate other types of geometry, and topology. Yet theyare not well treated as university topics, being either neglected or spread over a num-ber of courses, so that typically a student picks up a knowledge of these incidentallyand relies mainly on the earlier intuitive treatment at school.
Clearly the treatment of geometry has seriously declined over the last fifty years,in terms of both quantity and quality. Lecturers and authors are faced with the ques-tion of what, if anything, should be done to try to restore it to a position of somesubstance. Bemoaning its fate is not enough, and surely authors especially shouldponder what kinds of approach are likely to prove productive.
Pure or synthetic geometry was the first mathematical topic in the field and for avery long time the best established. It was natural for authors to cover as much groundas was feasible, and ultimately there was a large bulk of basic and further geometry.That was understandable in its time but perhaps a different overall strategy is nowneeded.
Synthetic geometry seems very difficult. In it we do not have the great benefit ofsymbolic manipulations. It is very taxing to justify diagrams and to make sure of cov-ering all cases. From the very richness of its results, it is difficult to plan a productiveapproach to a new problem. In the proofs that have come down to us, extra points andsegments frequently need to be added to the configuration. It is true that, as in anyapproach, there are some results which are handled very effectively and elegantly bysynthetic methods, but that is certainly not the whole story. On the other hand, whatis undeniable is that synthetic geometry really deals with geometry, and it forces at-tention to, and clarity in, geometrical concepts. It encourages the careful layout ofsequential proof. Above all, it has a great advantage in its intuitive visualisation andconcreteness.
The plan of this book is to have a basic layer of synthetic geometry, essentially fivechapters in all, because of its advantages, and thereafter to diversify as much as pos-sible to other techniques and approaches because of its difficulties. More than that,we assume strong axioms (on distance and angle-measure) so as to have an efficientapproach from the start. The other approaches that we have in mind are the use of co-ordinates, trigonometry, position-vectors and complex numbers. Our emphasis is onclarity of concepts, proof and systematic and complete development of material. Thesynthetic geometry that we need is what is sufficient to start coordinate geometry andtrigonometry, and that takes us as far as the ratio results for triangles and Pythagoras’theorem. In all, a considerable portion of traditional ground involving straight-linesand circles is covered. The overall approach is innovative as is the detail on trigonom-etry in Chapter 9 and on what are termed ‘mobile coordinates’ in Chapter 11. Some
xviii Preface
new concepts and substantial new notation have been introduced. There is enough fora two-semester course; a one-semester one could be made from Chapters 2-9, withChapter 7 trimmed back.
My object has been to give an account at once accessible and unobtrusively rig-orous. Preparation has been in the nature of unfinished business, stemming from mygreat difficulties when young in understanding the then textbooks in geometry. I holdthat the reasoning in geometry should be as convincing as that in other parts of mathe-matics. It is too much to hope that there are no errors, mathematical or typographical.I should be grateful to be told of any at the email address [email protected].
Acknowledgements
I am grateful to students in a succession of classes who responded to this materialin its nascent stages, to departmental colleagues, especially Finbarr Holland and DesMacHale, who attended presentations of it, and to American colleagues the late DavidRosen of Swarthmore and John Elliott of Fort Kent, Maine, who read an earlier ap-proach of mine to geometry. I am especially grateful to Dr. P.A.J. Cronin, a colleaguein our Department of Ancient Classics, for preparing the translations from Greek andLatin in the Glossary on pp. xix-xx.
Paddy Barry
National University of Ireland, Cork,November, 2000.
PREFATORY NOTE TO THE REVISED EDITION
Several changes have taken place since the preparation of this material in theyears leading up to 2001. The original publisher HORWOOD was acquired in 2010by WOODHEAD which in turn was acquired in 2013 by ELSEVIER. HoweverWOODHEAD is retaining its imprint.
The reason for a revised edition was that the stock for the original edition wasexhausted. There is not a lot of alteration in this edition, some correction of errors andthe strengthening of some proofs apart from Chapter 11 in which there is considerablealteration of detail.
There is a great alteration in the software available and required in mathemati-cal word processing, particularly on those who have relied heavily on pstricks forpreparing diagrams, and I owe a huge debt in this regard to my colleagues Paul Kee-gan, Marc van Dongen, Peter Flynn, Stephen Wills, Ben McKay and Joseph Man-ning. I also thank Ulrike Fischer, who is a troubleshooter for TeX, and without whoseinvolvement this project would not have been completed.
Paddy Barry
National University of Ireland, Cork,February, 2015.
Glossary
Greek and Latin roots of mathe-matical words
acute < L acutus, sharp-pointed (perf.partic. ofacuere, to sharpen).
addition < L additio, an adding to (addere, toadd).
angle < L angulus, corner < Gk agkylos, bent.
area < L area, a vacant space.
arithmetic < Gk arithmetike (sc. tekhne), the artof counting (arithmein, to count;arithmos, number).
axiom < Gk axioma, self-evident principle (ax-ioun, to consider worthy; axios, worthy).
calculate < L calculatus, reckoned (perf.partic. of calculare < calculus, pebble).
centre < Gk kentron, sharp point (kentein, tospike).
chord < Gk khorde, string of gut.
circle < L circulus, ring-shaped figure (related toGk kyklos, ring; kirkos or krikos, ring).
congruent < L congruens (gen. congruentis),agreeing with (pres. partic. of congruere,to agree with).
curve < L curvus (curvare, to bend).
decimal < L (Med) decimalis, of tenths (decima(sc. pars), tenth part; decem, ten).
degree < OF degre < L degredi, descend (de,down; gradi, to step).
diagonal < L diagonalis, diagonal < Gk diago-nios, from angle to angle (dia,through ; gonia, angle).
diagram < Gk diagramma, plan, figure indicatedby lines (dia, through; gramma, a thingwhich is drawn; graphein,to draw).
diameter < Gk diametros, diametrical (dia,through ; metron, measure).
distance < L distantia, remoteness (distare, tostand apart).
divide < L dividere, to separate.
equal < L equalis, equal (aequare, tomake equal; aequus, equal).
example < L exemplum, sample < eximere, totake out.
exponent < L exponens (gen. exponentis), set-ting forth (pres. partic. of exponere, to setforth; ex, out; ponere to place).
factor < L factor, maker, doer (facere, to make).
focus < L focus, hearth.
fraction < L fractio, a breaking into pieces (fran-gere, to break).
geometry < Gk geometria, measuring of land(ge,land; metrein, to measure).
graph < Gk graphos, drawing, picture(graphein, to draw).
hypotenuse < Gk hypoteinousa (sc.gramme), the line extending underneath(pres. partic. of hypoteinein, to extend un-der; gramme, line).
hypothesis < Gk hypothesis,supposition, assumption (hypotithenai, toplace beneath).
inclination < L inclinatio, a leaning to one side(inclinare, to cause to lean).
induction < L inductio, a leading into (inducere,to lead in).
isosceles < Gk isoskeles, having equal legs (isos,equal; skelos, leg).
line < L linea, a linen thread (linum, flax < Gk.linon).
logic < Gk logike (sc. techne), the art of reason-ing (logos, reason; logikos, endowed withreason; techne, art).
magnitude < L magnitudo, size, greatness (mag-nus, great).
mathematics < Gk mathematika, thingsthat require mathematical or scientificreasoning (mathema, lesson; mathemat-/ikos, mathematical or scientific; manthan-ein, to learn).
measure < F mesure < L mensura, measure (me-tiri, to measure).
minus < L minus, less.
multiply < L multiplicare, multiply(multus, much; plicare, to lay together).
negative < L negativus, denying (negare, todeny).
number < F nombre < L numerus, number.

xx Glossary
oblong < L oblongus, longish.
obtuse < L obtusus, blunted (perf. partic. of ob-tundere, to blunt).
orthogonal < Gk orthogonios, rectangular (or-thos, right; gonia, angle).
parallel < Gk parallelos, beside one another(para, beside; allelous, oneanother).
perimeter < Gk perimetron, circumference (periaround; metron, measure).
perpendicular < L perpendiculum,plumb-line (perpendere, to weigh precise-ly).
plane < L planum, level ground (planus,level).
point < L punctum, small hole (pungere, topierce).
polygon < Gk polygonon, thing withmany angles (polys, many; gonia, angle).
positive < L positivus, settled (ponere, to place).
postulate < L postulare, to ask for.
power < OF poeir < L posse, to be able.
product < L productus, brought forth (perf. par-tic. of producere, to bringforth).
proportion < L portio, comparativerelationship (pro, according to;portio, part).
quadrangle < L quadrangulum, thingwith four angles (quattuor, four; angulus,angle).
quotient < L quotiens, how often.
radius < L radius, rod, spoke of wheel.
rectangle < L rectiangulum, right-angled (rectus, right; angulus, angle).
rhombus < Gk rhombos, a devicewhirled round (rhembein, to whirl round).
science < L scientia, knowledge (scire, to know).
secant < L secans (gen. secantis), cutting (se-care, to cut).
square < OF esquarre < L quattuor,four.
subtract < L subtractus, withdrawn(perf. partic. of subtrahere, to withdraw).
sum < L summa, top.
tangent < L tangens (sc. linea) (gen.tangentis), touching line (tangere, totouch; linea, line).
technical < Gk tekhnikos, artistic, skilful(tekhne, art).
theorem < Gk theorema, thing observed, de-duced principle (theorein, to observe).
total < L totus, whole, all.
trapezium < Gk trapezion, small table(trapeza, table).
triangle < L triangulum, triangle (tris,three; angulus, angle).
trigonometry < Gk trigonometria,measurement of triangles (trigonon, trian-gle; metrein, to measure).
vector < L vector, bearer (vehere, tobear).
vertex < L vertex, summit.
volume < OF volum < L volumen, roll, book(volvere, to roll).

1
Preliminaries
1.1 HISTORICAL NOTE
This is one in a long line of textbooks on geometry. While all civilisations seem tohave had some mathematical concepts, the most significant very old ones historicallywere the linked ones of Sumer, Akkad and Babylon, largely in the same region inwhat is now southern Iraq, and the separate one of Egypt. These are the ones whichhave left substantial traces of their mathematics, which was largely arithmetic, andgeometrical shapes and measurement.
The outstanding contribution to mathematics was in Greece about 600 B.C.–200 B.C. The earlier mathematics conveyed techniques by means of examples, butthe Greeks stated general properties of the mathematics they were doing, and or-ganised proof of later properties from ones taken as basic. There was astonishingprogress in three centuries and the fruit of that was written up in Euclid’s The Ele-ments, c. 300B.C. He worked in Alexandria in Egypt, which country had come intothe Greek sphere of influence in the previous century.
Euclid’s The Elements is one of the most famous books in the world, certainlythe most famous on mathematics. But it was influential widely outside mathematicstoo, as it was greatly admired for its logical development. It is the oldest writing ongeometry of which we have copies by descent, and it lasted as a textbook until after1890, although it must be admitted that in lots of places and for long periods not verymany people were studying mathematics. It should probably be in the Guinness Bookof Records as the longest lasting textbook in history.
The Elements shaped the treatment of geometry for 2,000 years. Its style wouldbe unfamiliar to us today, as apart from using letters to identify points and henceline-segments, angles and other figures in diagrams, it consisted totally of words.Thus it did not use symbols as we do. It had algebra different from ours in that itsaid things in words written out in full. Full symbolic algebra as we know it was notperfected until about 1600 A.D. in France, by Vieta and later Descartes. Another verysignificant feature of The Elements was that it did not have numbers ready-made, andused distance or length, angle-measure and area as separate quantities, although links
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50001-X

2 Preliminaries Ch. 1
between them were worked out.Among prominent countries, The Elements lasted longest in its original style in
the U.K., until about 1890. They had started chipping away at it in France in the16th century, beginning with Petrus Ramus 1515-1572. There is a very readable ac-count of the changes which were made in France in Cajori [3, pages 275 – 289].These changes mainly involved disimprovements logically; authors brought in con-cepts which are visually obvious, but they did not provide an account of the propertiesof these concepts. Authors in France, and subsequently elsewhere, started using ouralgebra to handle the quantities and this was a major source of advance. One veryprominent textbook of this type was Elements of Geometry by Legendre, (first edi-tion 1794), which was very influential on the continent of Europe and in the U.S.A.All in all, these developments in France shook things up considerably, and that wasprobably necessary before a big change could be made.
Although The Elements was admired widely and for a long time for its logic,there were in fact logical gaps in it. This was known to the leading mathematiciansfor quite a while, but it was not until the period 1880-1900 that this geometry was puton what is now accepted as an adequate logical foundation. Another famous bookFoundations of Geometry by Hilbert (1899) was the most prominent in doing this.The logical completion made the material very long and difficult, and this type oftreatment has not filtered down to school-level at all, or even to university undergrad-uate level except for advanced specialised options.
Another sea-change was started in 1932 by G.D. Birkhoff; instead of buildingup the real number system via geometrical quantities, he assumed a knowledge ofnumbers and used that from the start in geometry; this appeared in his ‘ruler postulate’and ‘protractor postulate’. His approach allowed for a much shorter, easier and moreefficient treatment of geometry.
In the 1960’s there was the world-wide shake-up of the ‘New Mathematics’, andsince then there are several quite different approaches to geometry available. In thisChapter 1 we do our best to provide a helpful introduction and context, and suggesta re-familiarisation with the geometrical knowledge already acquired.
Logically organised geometry dates from c. 600-300 B.C. in Greece;by c. 350B.C. there was already a history of geometry by Eudemus. From the sameperiod and earlier, date positive integers and the treatment of positive fractions viaratios. The major mathematical topics date from different periods: geometry as justindicated; full algebra from c. 1600 A.D.; full coordinate geometry from c. 1630A.D.;full numbers (negative, rational, decimals) from c. 1600 A.D.; complex numbers fromc. 1800 A.D.; calculus from c. 1675 A.D.; trigonometry from c. 200 B.C., althoughcircles of fixed length of radius were used until c. 1700 A.D. when ratios were intro-duced.
There is an account of the history of geometry of moderate length by H. Eves in[2, pages 165-192]
It should be clear from this history that the Greek contribution to geometry greatlyinfluenced all later mathematics. It was transmitted to us via the Latin language,and we have included a Glossary on pp. xix-xx showing the Greek or Latin roots of

Sec. 1.2 Note on deductive reasoning 3
mathematical words.
1.2 NOTE ON DEDUCTIVE REASONING
The basic idea of a logical system is that we list up-front the terms and properties thatwe start with, and thereafter proceed by way of definitions and proofs. There are twomain aspects to this.
1.2.1 Definitions
The first aspect concerns specifying what we are dealing with. A definition identifiesa new concept in terms of accepted or known concepts. In practice a definition of aword, symbol or phrase E is a statement that E is to be used as a substitute for F ,the latter being a phrase consisting of words and possibly symbols or a compoundsymbol. We accept ordinary words of the English language in definitions and whatis at issue is the meaning of technical mathematical words or phrases. In attemptinga definition, there is no progress if the technical words or symbols in F are not allunderstood at the time of the definition.
The disconcerting feature of this situation is that in any one presentation of a topicthere must be a first definition and of its nature that must be in terms of acceptedconcepts. Thus we must have terms which are accepted without definition, that isthere must be undefined or primitive terms. This might seem to leave us in a hopelessposition but it does not, as we are able to assume properties of the primitive termsand work with those.
There is nothing absolute about this process, as a term which is taken as primitivein one presentation of a topic can very well be a defined term in another presentationof that topic, and vice versa. We need some primitive terms to get an approach underway.
1.2.2 Proof
The second aspect concerns the properties of the concepts that we are dealing with.A proof is a finite sequence of statements the first of which is called the hypothesis,and the last of which is called the conclusion. In this sequence, each statement afterthe hypothesis must follow logically from one or more statements that have beenpreviously accepted. Logically there would be a vicious circle if the conclusion wereused to help establish any statement in the proof.
There is also a disconcerting feature of this, as in any presentation of a topic theremust be a first proof. That first proof must be based on some statements which are notproved (at least the hypothesis), which are in fact properties that are accepted withoutproof. Thus any presentation of a topic must contain unproved statements; these arecalled axioms or postulates and these names are used interchangeably.
Again there is nothing absolute about this, as properties which are taken as ax-iomatic in one presentation of a topic may be proved in another presentation, and
4 Preliminaries Ch. 1
vice versa. But we must have some axioms to get an approach under way.
1.3 EUCLID’S The Elements
1.3.1
The Elements involved the earliest surviving deductive system of reasoning, havingaxioms or postulates and common notions, and proceeding by way of careful state-ments of results and proofs. Up to c. 1800, geometry was regarded as the part ofmathematics which was best-founded logically. But its position was overstated, andits foundations not completed until c. 1880-1900. Meanwhile the foundations of al-gebra and calculus were properly laid in the 19th century. From c. 1800 on, someeditions used algebraic notation in places to help understanding.
1.3.2 Definitions
The Greeks did not appreciate the need for primitive terms, and The Elements startedwith an attempt to define a list of basic terms.
DEFINITIONS
1. A POINT is that which has no parts, or which has no magnitude.
2. A LINE is length without breadth.
3. The EXTREMITIES of a line are points.
4. A STRAIGHT LINE is that which lies evenly between its extreme points.
5. A SUPERFICIES is that which has only length and breadth.
6. The EXTREMITIES of a superficies are lines.
7. A PLANE SUPERFICIES is that in which any two points being taken, thestraight line between them lies wholly in that superficies.
8. A PLANE ANGLE is the inclination of two lines to one another in a plane,which meet together, but are not in the same direction.
9. A PLANE RECTILINEAL ANGLE is the inclination of twostraight lines to one another, which meet together, but are not in the samestraight line.
10. When a straight line standing on another straight line, makes the adjacent an-gles equal to one another, each of the angles is called a RIGHT ANGLE; andthe straight line which stands on the other is called a PERPENDICULAR toit.

Sec. 1.3 Euclid’s The Elements 5
11. An OBTUSE ANGLE is that which is greater than a right angle.
12. An ACUTE ANGLE is that which is less than a right angle.
13. A TERM or BOUNDARY is the extremity of anything.
14. A FIGURE is that which is enclosed by one or more boundaries.
15. A CIRCLE is a plane figure contained by one line, which is called the CIR-CUMFERENCE, and is such that all straight lines drawn from a certain pointwithin the figure to the circumference are equal to one another.
16. And this point is called the CENTRE of the circle.
17. A DIAMETER of a circle is a straight line drawn through the centre, andterminated both ways by the circumference.
18. A SEMICIRCLE is the figure contained by a diameter and the part of thecircumference cut off by the diameter.
19. A SEGMENT of a circle is the figure contained by a straight line and thecircumference which cuts it off.
20. RECTILINEAL FIGURES are those which are contained by straight lines.
21. TRILATERAL FIGURES, or TRIANGLES, by three straight lines.
22. QUADRILATERAL FIGURES by four straight lines.
23. MULTILATERAL FIGURES, or POLYGONS, by more than fourstraight lines.
24. Of three-sided figures, an EQUILATERAL TRIANGLE is that which hasthree equal sides.
25. An ISOSCELES TRIANGLE is that which has two sides equal.
26. A SCALENE TRIANGLE is that which has three unequal sides.
27. A RIGHT-ANGLED TRIANGLE is that which has a right angle.
28. An OBTUSE-ANGLED TRIANGLE is that which has an obtuse angle.
29. An ACUTE-ANGLED TRIANGLE is that which has three acute angles.
30. Of four-sided figures, a SQUARE is that which has all its sides equal, and allits angles right angles.
31. An OBLONG is that which has all its angles right angles, but not all its sidesequal.

6 Preliminaries Ch. 1
32. A RHOMBUS is that which has all its sides equal, but its angles are not rightangles.
33. A RHOMBOID is that which has its opposite sides equal to one another, butall its sides are not equal, nor its angles right angles.
34. All other four-sided figures besides these are called TRAPEZIUMS.
35. PARALLEL STRAIGHT LINES are such as are in the same plane, andwhich being produced ever so far both ways do not meet.
Although in The Elements these definitions were initially given, some of thesewere treated just like motivations (for instance, for a point where no use was madeof the fact that ‘it has no parts’) whereas some were genuine definitions (like that ofa circle, where the defining property was used). Our definitions will differ in somerespects from these.
1.3.3 Postulates and common notions
The Greeks understood the need for axioms, and these were laid out carefully in TheElements. The Elements has two lists, a first one of POSTULATES and a second oneof COMMON NOTIONS. It is supposed by some writers that Euclid intended his listof POSTULATES to deal with concepts which are mathematical or geometrical, andthe second list to deal with concepts which applied to science generally.
POSTULATES
Let it be granted,
1. That a straight line may be drawn from any one point to any other point.
2. That a terminated straight line may be produced to any length in a straight line.
3. And that a circle may be described from any centre, at any distance from thatcentre.
4. All right angles are equal to one another.
5. If a straight line meet two straight lines, so as to make the two interior angleson the same side of it taken together less than two right angles, these straightlines, being continually produced, shall at length meet on that side on whichare the angles which are less than two right angles.
COMMON NOTIONS
1. Things which are equal to the same thing are equal to one another.

Sec. 1.3 Euclid’s The Elements 7
2. If equals be added to equals the wholes are equals.
3. If equals be taken from equals the remainders are equal.
4. Magnitudes which coincide with one another, [that is, which exactly fill thesame space] are equal to one another.
5. The whole is greater than its part.
1.3.4
The Elements attempted to be a logically complete deductive system. There were ear-lier Elements but these have not survived, presumably because they were outclassedby Euclid’s.
The Elements are charming to read, proceed very carefully by moderate steps andwithin their own terms impart a great sense of conviction. The first proposition is todescribe an equilateral triangle on [A,B]. With centre A a circle is described passingthrough B, and with centre B a second circle is described passing through A. If Cis a point at which these two circles cut one another, then we take the triangle withvertices A,B,C.
It is ironical that, with The Elements being so admired for their logical proceeding,there should be a gap in the very first proposition. The postulates and common notionsdid not make any provisions which would ensure that the two circles in the proofwould have a point in common. This may seem a curious choice as a first proposition,dealing with a very special figure. But in fact it is used immediately in Proposition 2,from a given point to lay off a given distance.
The main logical lack in The Elements was that not enough assumed propertieswere listed, and this fact was concealed through the use of diagrams.
1.3.5 Congruence
Two types of procedure in The Elements call for special comment. The first is themethod of superposition by which one figure was envisaged as being moved andplaced exactly on a second figure. The second is the process of construction by whichfigures were not dealt with until it was shown by construction that there actually wassuch a type of figure. In the physical constructions, what were allowed to be usedwere straight edges and compasses.
The notion of superposition is basic to Euclid’s treatment of figures. It is visu-alised that one figure is moved physically and placed on another, fitting perfectly. Weuse the term congruent figures when this happens. Common Notion 4 is to be used inthis connection. This physical idea is clearly extraneous to the logical set-up of prim-itive and defined terms, assumed and proved properties, and is not a formal part ofmodern treatments of geometry. However it can be used in motivation, and propertiesmotivated by it can be assumed in axioms.

8 Preliminaries Ch. 1
1.3.6 Quantities or magnitudes
The Elements spoke of one segment (then called a line) being equal to or greater thananother, one region being equal to or greater than another, and one angle being equalto or greater than another, and this indicates that they associated a magnitude witheach segment (which we call its length), a magnitude with each region (which wecall its area), and a magnitude with each angle (which we call its measure). They didnot define these magnitudes or give a way of calculating them, but they gave sufficientproperties for them to be handled as the theory was developed. In the case of each ofthem the five common notions were supposed to apply.
Thus in The Elements, the quantities for which the Common Notions are intendedare distance or equivalently length of a segment, measure of an angle and area ofa region. These are not taken to be known, either by assumption or definition, butcongruent segments are taken to have equal lengths, congruent angles are taken tohave equal measures, and congruent triangles are taken to have equal areas. Thusequality of lengths of segments, equality of measures of angles, and equality of areasof triangles are what is started with. Treatment of area is more complicated than theother two, and triangles equal in area are not confined to congruent triangles. Additionand subtraction of lengths are to be handled using Common Notions 1, 2, 3 and 4;so are addition and subtraction of angle measures; so are addition and subtraction ofarea.
Taking a unit length, there is a long build-up to the length of any segment. Theyreached the stage where if some segment were to be chosen to have length 1 the lengthof any segment which they encountered could be found, but this was not actually donein The Elements.
Taking a right-angle as a basic unit, there was a long build-up to handling anyangle. They reached the stage where if a right-angle was taken to have measure 90◦,the measure of any angle which they encountered could be found, but this was notactually done.
There is a long build up to the area of figures generally. The regions which theyconsidered were those which could be built up from triangles, and they reached thestage where if some included region were chosen to have area 1 the area of anyincluded region could be found. This is not actually completed in The Elements butthe materials are there to do it with.
All this shows that The Elements although very painstaking, thorough and exactwere also rather abstract. It should be remembered that the Greeks did not have alge-bra as we have, and used geometry to do a lot of what we do by algebra. In particular,considering the area of a rectangle was their way of handling multiplication of quan-tities. Traditionally in arithmetic the area of a rectangle was dealt with as the productof the length and the breadth, that is by multiplication of two numbers. However,reconciling the geometrical treatment of area with the arithmetical does not seem tohave been handled very explicitly in books, not even when from 1600 A.D. onwardsreal numbers were being detached from the ‘quantities’ of Euclid.
Sec. 1.4 Our approach 9
1.4 OUR APPROACH
1.4.1 Type of course
Very scholarly courses in geometry assume as little as possible, and as a result arelong and difficult. Shorter and easier courses have more or stronger assumptions, andcorrespondingly less to prove. What is difficult in a thorough course of geometry isnot the detail of proof usually included, but rather is, first of all, locational viz. toprove that points are where diagrams suggest they are, that is to verify the diagrams,and secondly to be sure of covering all cases.
In particular, the type of approach which assumes that distance, angle-measureand area are different ‘quantities’ leads to a very long and difficult treatment of ge-ometry. To make things much easier and shorter, we shall suppose that we know whatreal numbers are, and deal with distance/length and angle-measure as basic conceptsgiven in terms of real numbers, and develop their properties. Moreover, we shall de-fine area in terms of lengths.
What we provide, in fact, is a combination of Euclid’s original course and a modi-fication of an alternative treatment due to the American mathematician G.D. Birkhoffin 1932.
1.4.2 Need for preparation
What this course aims to do is to revise and extend the geometry and trigonometrythat has been done at school. It gives a careful, thorough and logical account of famil-iar geometry and trigonometry. At school, a complete, logically adequate treatmentof geometry is out of the question. It would be too difficult and too long, unattractiveand not conducive to learning geometry; it would tend rather to put pupils off.
Thus this is not a first course in geometry. It is aimed at third level students, whoshould have encountered the basic concepts at secondary, or even primary, school.It starts geometry and trigonometry from scratch, and thus is self-contained to thatextent.
But it is demanding because of a sustained commitment to deductive reasoning.In preparation the reader is strongly urged to start by revising the geometry andtrigonometry which was done at school, at least browsing through the material. Itwould also be a good idea to read in some other books some descriptive material ongeometry, such as the small amount in Ledermann and Vajda [10, pages 1 – 26], or thelarge amount in Wheeler and Wheeler [13, Chapters 11 – 15]. Similarly trigonometryand vectors can be revised from McGregor, Nimmo and Stothers [11, pages 99 – 123,279 – 331].
It would moreover be helpful to practise geometry by computer, e.g. by using soft-ware systems such as The Geometer’s Sketchpad or Cabri-Géomètre. Material whichcan be found in elementary books should be gone over, and also a look forwardscould be had to the results in this book.

10 Preliminaries Ch. 1
1.5 REVISION OF GEOMETRICALCONCEPTS
1.5.1
As part of the preliminary programme, we now include a review of the basic conceptsof geometry. Geometry should be thought of as arising from an initial experimentaland observational stage, where the figures are looked at and there is a great emphasison a visual approach.
1.5.2 The basic shapes
1. The plane Π is a set, the elements of which are called points. Certain subsets of Πare called lines.
By observation, given any distinct points A,B ∈ Π, there is a unique line to whichA and B both belong. It is denoted by AB.
2. Given distinct points A and B, the set of points consisting of A and B themselvesand all the points of the line AB which are between A and B is called a segment, anddenoted by [A,B].
�
�
AB
Figure 1.1. A line AB.The arrows indicate that the lineis to be continued unendingly.
�
�
AB
Figure 1.2. A segment [A,B].
NOTE. Note that the modern mathematical terminology differs significantly from thatin The Elements. What was called a ‘line’ is now called a segment, and we have addedthe new concept of ‘line’. This is confusing, but the practice is well established. Inordinary English and in subjects cognate to mathematics, ‘line’ has its old meaning.
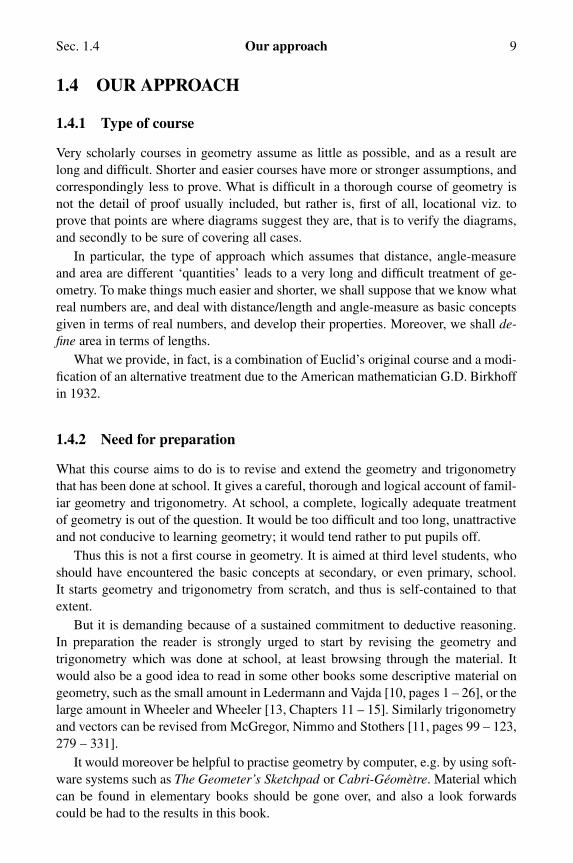
3. The set consisting of the point A itself and all the points of the line AB whichare on the same side of A as B is, is called a half-line, and denoted by [A,B . If A isbetween B and C, then the half-lines [A,B and [A,C are said to be opposite.
Sec. 1.5 Revision of geometrical concepts 11
�
�
AB
Figure 1.3. A half-line [A,B .
�
�
�
�
AB
C
Opposite half-lines.
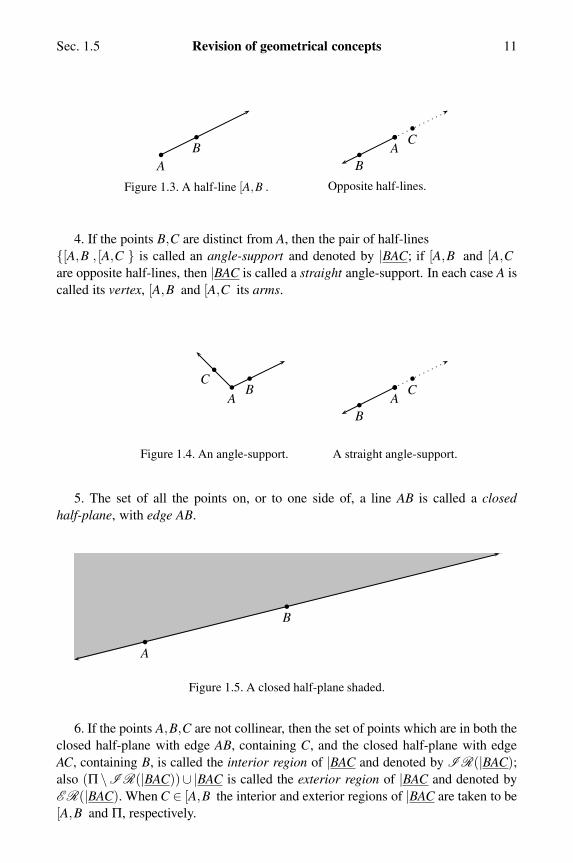
4. If the points B,C are distinct from A, then the pair of half-lines{[A,B , [A,C } is called an angle-support and denoted by |BAC; if [A,B and [A,Care opposite half-lines, then |BAC is called a straight angle-support. In each case A iscalled its vertex, [A,B and [A,C its arms.
�
�
�
AB
C
Figure 1.4. An angle-support.
�
�
�
�
AB
C
A straight angle-support.
5. The set of all the points on, or to one side of, a line AB is called a closedhalf-plane, with edge AB.
�
�
A
B
Figure 1.5. A closed half-plane shaded.
6. If the points A,B,C are not collinear, then the set of points which are in both theclosed half-plane with edge AB, containing C, and the closed half-plane with edgeAC, containing B, is called the interior region of |BAC and denoted by I R(|BAC);also (Π \I R(|BAC))∪ |BAC is called the exterior region of |BAC and denoted byE R(|BAC). When C ∈ [A,B the interior and exterior regions of |BAC are taken to be[A,B and Π, respectively.

12 Preliminaries Ch. 1
�
�
�
AB
C
Figure 1.6. An interior region.
�
�
�
AB
C
The corresponding exterior region.
7. If |BAC is a non-straight angle-support, then the couples(|BAC, I R(|BAC)), (|BAC, E R(|BAC)), are called the wedge-angle and reflex-angle, respectively, with support |BAC; this wedge-angle is denoted by ∠BAC. Thusa wedge-angle is a pair of arms in association with an interior region, while a reflex-angle is a pair of arms combined with an exterior region.
If |BAC is a straight angle-support, and H1,H2 are the closed half-planes withedge the line AB, then the couples (|BAC, H1), (|BAC, H2), are called the straight-angles with support |BAC. If C ∈ [A,B then the wedge-angle ∠BAC =∠BAB is calleda null-angle, and the reflex-angle with support |BAB is called a full-angle.
Figure 1.7. A wedge-angle. A reflex-angle.
�
A straight-angle.
NOTE. The reason we call |BAC an angle-support and not an angle is that it sup-ports two angles. If we were confining ourselves to pure geometry, and not concernedto go forward to coordinate geometry and trigonometry, we could confine ourselvesto wedge and straight angles. Even more if we were to confine ourselves to the angles

Sec. 1.5 Revision of geometrical concepts 13
in triangles, we could take |BAC = [A,B ∪ [A,C . However when A is between B andC, this would result in a straight-angle being a line, and it would not have a uniquevertex. In the early part of our course, we can confine our attention to wedge andstraight angles.
�
� �
A B
C
Figure 1.8. Supports bearing two angles each.
� � �
A B
C
8. If A is between B and C and D �∈ BC, the wedge-angles ∠BAD, ∠CAD arecalled supplementary. If A,B,C are not collinear, and A is between B and B1, and A isbetween C and C1, then the wedge-angles ∠BAC,∠B1AC1 are called opposite anglesat a vertex.
�
�
���
BAC
D
Figure 1.9. Supplementary angles.
�
�
�
�
�
� AB
C
B1
C1
Opposite angles at a vertex.
9. If A,B,C are non-collinear points and [A,D is in the interior region of |BAC,then [A,D is said to be between [A,B and [A,C .
�
�
�
�
�
�
AB
CD
Figure 1.10. [A,D between [A,B and [A,C .
10. If A,B,C are non-collinear points, let H1 be the closed half-plane with edgeBC, containing A, H3 be the closed half-plane with edge CA, containing B, H5 bethe closed half-plane with edge AB, containing C. Then the intersection H1 ∩H3 ∩

14 Preliminaries Ch. 1
H5 is called a triangle. The points A,B,C are called its vertices and the segments[B,C], [C,A], [A,B] its sides. If a vertex is not the end-point of a side ( e.g. the vertexA and the side [B,C]), then the vertex and side are said to be opposite each other. Wedenote the triangle with vertices A,B,C by [A,B,C].
If at least two sides of a triangle have equal lengths, then the triangle is calledisosceles.
A
B
C
Figure 1.11. A triangle [A,B,C].
A
B D C
An isosceles triangle.
11. Let A, B, C, D be points no three of which are collinear, and such that [A,C]∩[B,D] �= /0. For this let H1 be the closed half-plane with edge AB, containing C, H3
be the closed half-plane with edge BC, containing D, H5 be the closed half-planewith edge CD, containing A, H7 be the closed half-plane with edge DA, containingB. Then the intersection H1 ∩H3 ∩H5 ∩H7 is called a convex quadrilateral.
The points A, B, C, D are called its vertices, the segments [A,B], [B,C], [C,D],[D,A] its sides, and the segments [A,C], [B,D] its diagonals. Two vertices which havea side in common are said to be adjacent, and two vertices which have a diagonal incommon are said to be opposite. Thus A and B are adjacent as they both belong to[A,B] which is a side; A and C are opposite as they both belong to [A,C] which is adiagonal.
Two sides which have a vertex in common are said to be adjacent, and twosides which do not have a vertex in common are said to be opposite. Thus the sides[A,B], [D,A] are adjacent as the vertex A belongs to both, while the sides [A,B], [C,D]are opposite as none of the vertices belongs to both of them. The wedge angles ∠DAB,∠ABC, ∠BCD, ∠CDA are called the angles of the convex quadrilateral; two of theseangles are said to be adjacent or opposite according as their two vertices are adjacentor opposite vertices of the convex quadrilateral.
We denote the convex quadrilateral with vertices A, B, C, D, with A and C oppo-site, by [A,B,C,D].

Sec. 1.5 Revision of geometrical concepts 15
A
B
CD
Figure 1.12. A convex quadrilateral.
1.5.3 Distance; degree-measure of an angle
1. With each pair (A,B) of points we associate a non-negative real number |A,B|,called the distance from A to B or the length of the segment [A,B]. In all cases |B,A|=|A,B|. By observation, given any non-negative real number k, and any half- line [A,Bthere is a unique point P ∈ [A,B such that |A,P|= k.
�
�
A
Pk
Figure 1.13. Laying off a distance k.
�
�
�
PQ
Rx
y
x+y
Addition of distances.
By observation, if Q ∈ [P,R] then |P,Q|+ |Q,R|= |P,R|. In all cases |A,A|= 0, while|A,B|> 0 if A �= B.
2. Given distinct points A and B, choose the point C ∈ [A,B so that |A,C|= 12 |A,B|.
Then C is between A and B and
|C,B|= |A,B|− |A,C|= |A,B|− 12|A,B|= 1
2|A,B|= |A,C|.
The point C which is on the line AB and equidistant from A and B, is called themid-point of A and B. It is also called the mid-point of the segment [A,B].
�
�
�
A
C
B
+
+
Figure 1.14. Mid-point of A and B.

16 Preliminaries Ch. 1
3. With each wedge-angle ∠BAC we associate a non-negative number, called itsdegree-measure, denoted by |∠BAC|◦, and for each straight-angle α we take |α |◦ =180.
�A
B
DC
x
y
x+ y
Figure 1.15. Addition of angle-measures.
�
A
B
D
C
x
y180
�A
B
C
H1
k
Figure 1.16. Laying off an angle.
By observation, we note that if A,B,C are non-collinear and [A,D is between[A,B and [A,C , then |∠BAD|◦+ |∠CAD|◦ = |∠BAC|◦, while if [A,B and [A,C areopposite and D �∈ AB, then |∠BAD|◦+ |∠CAD|◦ = 180.
By observation, given any number k with 0 ≤ k < 180 and any half-line [A,B , oneach side of the line AB there is a unique wedge-angle ∠BAC with |∠BAC|◦ = k. Inall cases |∠BAB|◦ = 0, so that the degree-measure of each null angle is 0, while if∠BAC is not null then |∠BAC|◦ > 0.
It follows from the foregoing, that if ∠BAD is any wedge-angle then|∠BAD|◦ < 180, and that if ∠BAD, ∠CAD are supplementary angles, then |∠CAD|◦= 180−|∠BAD|◦.
4. Given points B and C distinct from A such that C �∈ [A,B , we can choose a pointD such that |∠BAD|◦ is equal to half the degree-measure of the wedge or straightangle with support |BAC. Then for all points P �=A on the line AD we have |∠BAP|◦=|∠PAC|◦. We call AP the mid-line or bisector of the support |BAC.
Sec. 1.5 Revision of geometrical concepts 17
�
� �
�
�
A B
C PD
Figure 1.17. Mid-line of an angle-support.
� � � �
�
�
A BC
PD
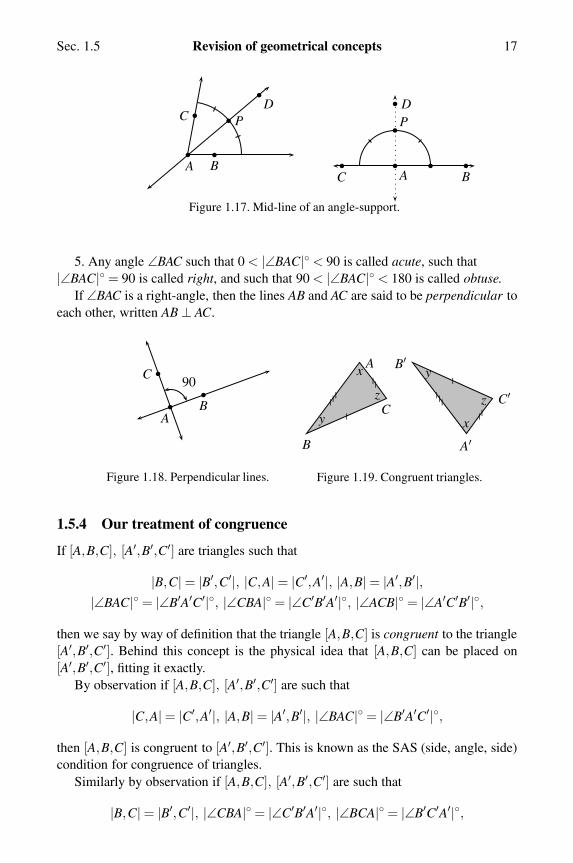
5. Any angle ∠BAC such that 0 < |∠BAC|◦ < 90 is called acute, such that|∠BAC|◦ = 90 is called right, and such that 90 < |∠BAC|◦ < 180 is called obtuse.
If ∠BAC is a right-angle, then the lines AB and AC are said to be perpendicular toeach other, written AB ⊥ AC.
�
�
�
AB
C90
Figure 1.18. Perpendicular lines.
Ax
B
yC
z
A′x
B′y
C′z|
|||
|| |
|| |
||
Figure 1.19. Congruent triangles.
1.5.4 Our treatment of congruence
If [A,B,C], [A′,B′,C′] are triangles such that
|B,C|= |B′,C′|, |C,A|= |C′,A′|, |A,B|= |A′,B′|,|∠BAC|◦ = |∠B′A′C′|◦, |∠CBA|◦ = |∠C′B′A′|◦, |∠ACB|◦ = |∠A′C′B′|◦,
then we say by way of definition that the triangle [A,B,C] is congruent to the triangle[A′,B′,C′]. Behind this concept is the physical idea that [A,B,C] can be placed on[A′,B′,C′], fitting it exactly.
By observation if [A,B,C], [A′,B′,C′] are such that
|C,A|= |C′,A′|, |A,B|= |A′,B′|, |∠BAC|◦ = |∠B′A′C′|◦,
then [A,B,C] is congruent to [A′,B′,C′]. This is known as the SAS (side, angle, side)condition for congruence of triangles.
Similarly by observation if [A,B,C], [A′,B′,C′] are such that
|B,C|= |B′,C′|, |∠CBA|◦ = |∠C′B′A′|◦, |∠BCA|◦ = |∠B′C′A′|◦,

18 Preliminaries Ch. 1
then [A,B,C] is congruent to [A′,B′,C′]. This is known as the ASA (angle, side, angle)condition for congruence of triangles.
It can be proved that if T and T ′ are triangles with vertices {A,B,C},{A′,B′,C′}, respectively, for which
|B,C|= |B′,C′|, |C,A|= |C′,A′|, |A,B|= |A′,B′|,
then T is congruent to T ′. This is known as the SSS(side-side-side) principle of con-gruence.
1.5.5 Parallel lines
1. Distinct lines l, m are said to be parallel if l ∩m = /0; this is written as l ‖ m. Wealso take l ‖ l.
l
m
Figure 1.20. Parallel lines.
By observation, given any line l and any point P there cannot be more than oneline m through P which is parallel to l.
�
��
�
�
AB
PR
Q
◦◦
Figure 1.21. Alternate angles for a transversal.
�
��
�
�
�
�
�
AB
PR
QS
T
◦
◦
Corresponding angles.
It can be shown that two lines are parallel if and only if alternate angles madeby a transversal, as indicated, are equal in magnitude, or equivalently, if and only ifcorresponding angles made by a transversal are equal in magnitude.
2. A convex quadrilateral in which opposite side-lines are parallel to each other iscalled a parallelogram. A parallelogram in which adjacent side-lines are perpendic-ular to each other is called a rectangle.

Sec. 1.6 Pre-requisites 19
A
B C
D
T
Figure 1.22. A parallelogram.
A
B C
D
T
A rectangle.
1.6 PRE-REQUISITES
Although this book re-starts geometry and trigonometry from the beginning, it doesnot take mathematics from a start. Consequently there is material from other parts ofmathematics which is assumed known. This also should be revised at the start, or atthe appropriate time when it is needed.
At the beginning, we presuppose a moderate knowledge of set theory, sufficientto deal with sets, relations and functions, in particular order and equivalence rela-tions. From Chapter 3 on we assume a knowledge of the real number system, and theelementary algebra involved. Later requirements come in gradually.
1.6.1 Set notation
For set notation we refer to Smith [12, pages 1 – 38]. We mention that we use theword function where it uses map. We should also like to emphasise the differencebetween a set {a,b} and a couple or ordered pair (a,b). In a set, the order of theelements does not matter, so that {a,b} = {b,a} in all cases, and
{a,b} = {c,d}
if and only if either
a = c and b = d
or
a = d and b = c.
In a couple (a,b) it matters which is first and which is second. Thus (a,b) �= (b,a)unless a = b, and
(a,b) = (c,d)
if and only if
a = c and b = d.

20 Preliminaries Ch. 1
1.6.2 Classical algebra
We need a knowledge of the real number system and the complex number system, andthe classical algebra involving these, up to dealing with quadratic equations and twosimultaneous linear equations in two unknowns. For this very elementary materialthere is an ample provision of textbooks entitled College Algebra by internationalpublishers.
1.6.3 Other algebra
For matrices and determinants we refer to Smith [12, pages 95 – 124] and McGregor,Nimmo and Stothers [11, pages 243 – 278], and for the little that we use on grouptheory to Smith [12, pages 125 – 152].
1.6.4 Distinctive property of real numbers among fields
For the properties that distinguish the field of real numbers from other ordered fields,we refer to Smith [12, pages 153 – 196].

2
Basic shapes of geometry
COMMENT. Geometry deals with our intuitions as to the physical space in whichwe exist, with the properties of the shapes and sizes of bodies as mathematicallyabstracted. It differs from set theory in that in geometry there are distinguished orspecial subsets, and relations involving them. To start with we presuppose a moderateknowledge of set theory, sufficient to deal with sets, relations and functions. FromChapter 3 on we assume a knowledge of the real number system, and the elementaryalgebra involved.
In this first chapter we introduce the plane, points, lines, natural orders on lines,and open half-planes as primitive concepts, and in terms of these develop other spe-cial types of geometrical sets.
2.1 LINES, SEGMENTS AND HALF-LINES
2.1.1 Plane, points, lines
Primitive Terms. Assuming the terminology of sets, the plane, denoted by Π, is auniversal set the elements of which are called points. Certain subsets of Π are called(straight) lines. We denote by Λ the set of all these lines.
AXIOM A1. Each line is a proper non-empty subset of Π. For each set {A,B} oftwo distinct points in Π, there is a unique line in Λ to which A and B both belong. |
We denote by AB the unique line to which distinct points A and B belong, so thatA ∈ AB and B ∈ AB. It is an immediate consequence of Axiom A1 that AB = BA; thatif C and D are distinct points and both belong to the line AB, then AB =CD; and thatif A,B are distinct points, both on the line l and both on the line m, then l = m.
Furthermore if l,m are any two lines in Λ, then either
l∩m = /0,
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50002-1

22 Basic shapes of geometry Ch. 2
or
l ∩m is a singleton,
or
l = m and in this last case l ∩m = l = m.
Moreover the plane Π is not a line, as each line is a proper subset of Π.If three or more points lie on one line we say that these points are collinear. If
one point lies on three or more lines we say that these lines are concurrent.
2.1.2 Natural order on a line
COMMENT. The two intuitive senses of motion along a line give us the originalexamples of linear (total) orders, and we refer to these as the two natural orders onthat line. On a diagram the sense of a double arrow gives one natural order on l, whilethe opposite sense would yield the other natural order on l. We now take natural orderas a primitive term, and go on to define segments and half-lines in terms of this andour existing terms.
�
�
A
B
Figure 2.1. A line AB.The arrows indicate that the lineis to be continued unendingly.
�
�
A
B
Figure 2.2. The double arrow indicatesa sense along the line AB.
Primitive Term . On each line l ∈ Λ there is a binary relation ≤l, which we referto as a natural order on l. We read A ≤l B as ‘A precedes or coincides with B on l ’.
AXIOM A2. Each natural order ≤l has the properties:-
(i) A ≤l A for all points A ∈ l;
(ii) if A ≤l B and B ≤l C then A ≤l C;
(iii) if A ≤l B and B ≤l A, then A = B;
(iv) for any points A,B ∈ l, either A ≤l B or B ≤l A. |
COMMENT. We refer to (i), (ii), (iii) in A2 as the reflexive, transitive and antisym-metric properties, respectively, of a binary relation; property (iii) can be reworded as,if A ≤l B and A �= B then B �≤l A. A binary relation with these three properties iscommonly called a partial order. A binary relation with all four properties (i), (ii),(iii) and (iv) in A2 is commonly called a linear order or a total order.

Sec. 2.1 Lines, segments and half-lines 23
2.1.3 Reciprocal orders
If A ≤l B we also write B ≥l A and read this as ‘B succeeds or coincides with A onl’. Then ≥l is also a total order on l, i.e. ≥l satisfies A2(i), (ii), (iii) and (iv), as canreadily be checked as follows.
First, on interchanging A and A in A2(i), we have A ≥l A for all A ∈ l. Secondly,suppose that A ≥l B and B ≥l C; then C ≤l B and B ≤l A, so by A2(ii) C ≤l A; henceA ≥l C. Thirdly, suppose that A ≥l B and B ≥l A; then B ≤l A and A ≤l B so by A2(iii)A = B. Finally, let A,B be any points on l; by A2(iv), either A ≤l B or B ≤l A and soeither B ≥l A or A ≥l B.
We say that ≥l is reciprocal to ≤l . If now we start with ≥l and let �l be itsreciprocal we have A �l B if B ≥l A; then we have A �l B if and only if A ≤l B. Thus�l coincides with ≤l, and so the reciprocal of ≥l is ≤l.
The upshot of this is that ≤l and ≥l are a pair of total orders on l, each the recipro-cal of the other. There is no natural way of singling out one of ≤l, ≥l over the other,and the notation is equally interchangeable as we could have started with ≥l. Havingthis pair is a nuisance but it is unavoidable, and we try to minimise the nuisance asfollows. Given distinct points A and B, let l = AB. Then exactly one of A ≤l B, A≥l Bholds; for by A2(iv) either A ≤l B or A ≥l B, and by A2(iii) both cannot hold as thatwould imply that A = B. Thus we can choose the natural order on l in which A pre-cedes B, by taking ≤l when A ≤l B, and by taking ≥l when A ≥l B; we will use thenotation ≤l for this natural order.
Let A and B be distinct points in Π, let l = AB and A ≤l B. Let C be a point of l,distinct from A and B. Then exactly one of
(a) C ≤l A ≤l B, (b) A ≤l C ≤l B, (c) A ≤l B ≤l C,
holds.Proof . If C ≤l A then clearly (a) holds. If C ≤l A is false, then by A2(iv) A ≤l C;
by A2(iv) we have moreover either C ≤l B or B ≤l C, and these yield, respectively,(b) and (c). Thus at least one of (a), (b), (c) holds.
On the other hand, if (a) and (b) hold, we have A=C by A2(iii) and this contradictsour assumptions. Similarly if (b) and (c) hold we would have B = C. Finally if (a)and (c) hold, from (a) we have C ≤l B by A2(ii) and then B =C.
2.1.4 Segments
Definition . For any points A,B ∈ Π, we define the segments [A,B] and [B,A] asfollows. Let l be a line such that A,B ∈ l and ≤l, ≥l a pair of reciprocal naturalorders on l. Then if
A ≤l B so that B ≥l A, (2.1.1)
we define
[A,B] ={P ∈ l : A ≤l P ≤l B}= {P ∈ l : A ≤l P and P ≤l B},[B,A] ={P ∈ l : B ≥l P ≥l A},

24 Basic shapes of geometry Ch. 2
while ifB ≤l A so that A ≥l B, (2.1.2)
we define
[B,A] ={P ∈ l : B ≤l P ≤l A},[A,B] ={P ∈ l : A ≥l P ≥l B}.
We should use a more complete notation such as [A,B]≤l ,≥l , [B,A]≤l ,≥l , but make dowith the less precise one. Note that (2.1.2) comes from (2.1.1) on interchanging Aand B, or on interchanging ≤l and ≥l .When A �= B, by A1 l = AB; byA2(iv) at least one of (2.1.1) and(2.1.2) holds, and by A2(iii) onlyone of (2.1.1) and (2.1.2) holds.
When A = B, l can be any linethrough A, and we find that {P ∈l : A ≤l P ≤l A} = {A}, {P ∈l : A ≥l P ≥l A} = {A}, for thesingleton {A}. To see this wenote that A ≤l A ≤l A by A2(i),while if A ≤l P ≤l A then P = Aby A2(iii). The same argumentholds for ≥l. Thus [A,A] = {A}.
�
�
A
B
Figure 2.3. A segment [A,B].
Segments have the following properties:-
(i) If A �= B, then [A,B]⊂ AB.
(ii) A,B ∈ [A,B] for all A,B ∈ Π.
(iii) [A,B] = [B,A] for all A,B ∈ Π.
(iv) If C,D ∈ [A,B] then [C,D]⊂ [A,B].
(v) If A,B,C are distinct points on a line l, then precisely one of
A ∈ [B,C], B ∈ [C,A], C ∈ [A,B],
holds.
Proof . In each case we suppose that A ≤l B so that we have (2.1.1) above; other-wise replace ≤l by ≥l throughout to cover (2.1.2).
(i) By A1, l = AB so [A,B] is a set of points on AB.(ii) By A2(i) A ≤l A ≤l B and A ≤l B ≤l B.(iii) As A ≤l B, then B ≥l A so [B,A] = {P ∈ l : B ≥l P ≥l A}. Now if P ∈ [A,B],
then A ≤l P and P ≤l B. It follows that B ≥l P and P ≥l A. Thus P ∈ [B,A] and so[A,B]⊂ [B,A]. By a similar argument [B,A]⊂ [A,B] and so [A,B] = [B,A].

Sec. 2.1 Lines, segments and half-lines 25
(iv) Let C,D ∈ [A,B] so that A ≤l C ≤l B and A ≤l D ≤l B. By A2(iv) either C ≤l Dor D ≤l C.
If C ≤l D and P ∈ [C,D], then C ≤l P ≤l D. Thus A ≤l C, C ≤l P so by A2(ii),A ≤l P. Also P ≤l D, D ≤l B so by A2(ii) P ≤l B. Thus P ∈ [A,B].
If D ≤l C, we interchange C and D in the last paragraph.(v) This follows immediately from 2.1.3.
2.1.5 Half-lines
Definition . Given a line l ∈ Λ, a point A ∈ l and a natural order ≤l on l, then the set
ρ(l,A,≤l) = {P ∈ l : A ≤l P},is called a half-line or ray of l, with initial point A.
Given distinct points A,B let ≤l be the natural order on l = AB for which A ≤l B;then we also use the notation [A,B for ρ(l,A,≤l).
�
�
A
B
Figure 2.4. A half-line [A,B .
�
�
�
�
A
B
C
Opposite half-lines.
As ≥l is also a natural order on l,
ρ(l,A,≥l) = {P ∈ l : A ≥l P}= {P ∈ l : P ≤l A}is also a half-line of l, with initial point A. We say that ρ(l,A,≤l) and ρ(l,A,≥l) areopposite half-lines.
Half-lines have the following properties:-
(i) In all cases ρ(l,A,≤l)⊂ l.
(ii) In all cases A ∈ ρ(l,A,≤l).
(iii) If B,C ∈ ρ(l,A,≤l), then [B,C]⊂ ρ(l,A,≤l).
Proof .(i) By the definition of ρ(l,A,≤l), we have P ∈ l for all P ∈ ρ(l,A,≤l) and so
ρ(l,A,≤l)⊂ l.(ii) By A2(i) A ≤l A, so A ∈ ρ(l,A,≤l).(iii) As B,C ∈ ρ(l,A,≤l) we have A ≤l B and A ≤l C. Since B,C ∈ l, by A2(iv)
either B ≤l C or C ≤l B. When B ≤l C, we have B ≤l P for all P ∈ [B,C]; with A ≤l Bthis gives A ≤l P by A2(ii), and so P ∈ ρ(l,A,≤l). When C ≤l B, we have a similarproof.

26 Basic shapes of geometry Ch. 2
2.2 OPEN AND CLOSED HALF-PLANES
2.2.1 Convex sets
Definition . A set E is said to be convex if for every P,Q ∈ E , [P,Q]⊂ E holds.NOTE. By 2.1.4(iv) every segment is a convex set; by 2.1.5(iii) so is every half-
line. In preparation for the next subsection, we note that by A1, for each line l ∈ Λwe have Π\ l �= /0.
2.2.2 Open half-planes
Primitive Term . Corresponding to each line l ∈ Λ, there is a pair {G1,G2} of non-empty sets called open half-planes with common edge l.
AXIOM A3. Open half-planes G1,G2 with common edge l have theproperties:-
(i) Π\ l = G1 ∪G2;
(ii) G1 and G2 are both convex sets;
(iii) if P ∈ G1 and Q ∈ G2, then [P,Q]∩ l �= /0. |
We note the following immediately.
Open half-planes {G1,G2} with common edge l have the properties:-
(i) l ∩G1 = /0, l∩G2 = /0.
(ii) G1 ∩G2 = /0.
(iii) If P ∈ G1 and [P,Q]∩ l �= /0 where Q �∈ l, then Q ∈ G2.
(iv) Each line l determines a unique pair of open half-planes.
Proof .(i) By A3(i), l ∩ (G1 ∪G2) = /0 and as G1 ⊂ G1 ∪G2 it follows that l ∩G1 = /0. The
other assertion is proved similarly.(ii) If G1 ∩G2 �= /0, there is some point R in both G1 and G2. By A3(iii) with P =
R, Q = R, we have that [R,R]∩ l �= /0. But R is the only point in [R,R] so R ∈ l. Thiscontradicts the fact that l∩G1 = /0.
(iii) For otherwise by A3(i), Q ∈ G1 and then by A3(ii) [P,Q]⊂ G1. As l ∩G1 = /0,it follows that [P,Q]∩ l = /0 which contradicts the assumptions.
(iv) Suppose thatΠ\ l = G1 ∪G2 = G
′1 ∪G
′2,
where {G1,G2} and {G ′1,G
′2} are both sets of open half-planes with common edge l.
ThenG1 ⊂ G1 ∪G2 = G
′1 ∪G
′2
so at one of the following holds

Sec. 2.2 Open and closed half-planes 27
(a) G1 ⊂ G ′1 or (b) G1 ⊂ G ′
2 or (c) G1 ∩G ′1 �= /0, G1 ∩G ′
2 �= /0.
In (c) we have P ∈ G1, P ∈ G ′1 and Q ∈ G1, Q ∈ G ′
2 for some P and Q. But then wehave [P,Q] ⊂ G1, by A3(ii) applied to G1, and [P,Q]∩ l �= /0, by A3(iii) applied to{G ′
1,G′2}. This gives a contradiction as l∩G1 = /0. Thus (c) cannot happen.
By similar reasoning, we must have either
(d) G ′1 ⊂ G1 or (e) G ′
1 ⊂ G2.
Now (a) and (d) give G1 = G ′1 and it follows that G2 = G ′
2 as
(G1 ∪G2)\G1 = G2, (G′1 ∪G
′2)\G
′1 = G
′2.
Similarly (b) and (e) give G1 = G ′2 and it follows that G2 = G ′
1.Finally, we cannot have (a) and (e) as that would imply G1 ⊂ G2. Neither can we
have (b) and (d).
TERMINOLOGY. If two pointsare both in G1 or both in G2 theyare said to be on the one sideof the line l, while if one of thepoints is in G1 and the other is inG2 they are said to be on differ-ent sides of l.
�
�
A
B
Figure 2.5. A closed half-plane shaded.
2.2.3 Closed half-planes
Definition . If G1,G2 are open half-planes with common edge l, we call
H1 = G1 ∪ l, H2 = G2 ∪ l,
closed half-planes with common edge l.
Closed half-planes H1,H2 with common edge l have the properties:-
(i) H1 ∪H2 = Π.
(ii) H1 ∩H2 = l.
(iii) Each of H1,H2 is a convex set.
(iv) If A ∈ l and B �= A is in H1, then [A,B ⊂ H1.
Proof .(i) By A3(i), Π = G1 ∪G2 ∪ l = (G1 ∪ l)∪ (G2 ∪ l) = H1 ∪H2.(ii) For (G1 ∪ l)∩ (G2 ∪ l) = (G1 ∩G2)∪ (G1 ∩ l)∪ (G2 ∩ l)∪ (l∩ l) = l∩ l = l.(iii) We prove that H1 is convex; proof for H2 is similar.Let A,B ∈ H1; we wish to show that [A,B]⊂ H1.CASE (a). Let A,B ∈ G1. Then the conclusion follows from A3(ii).
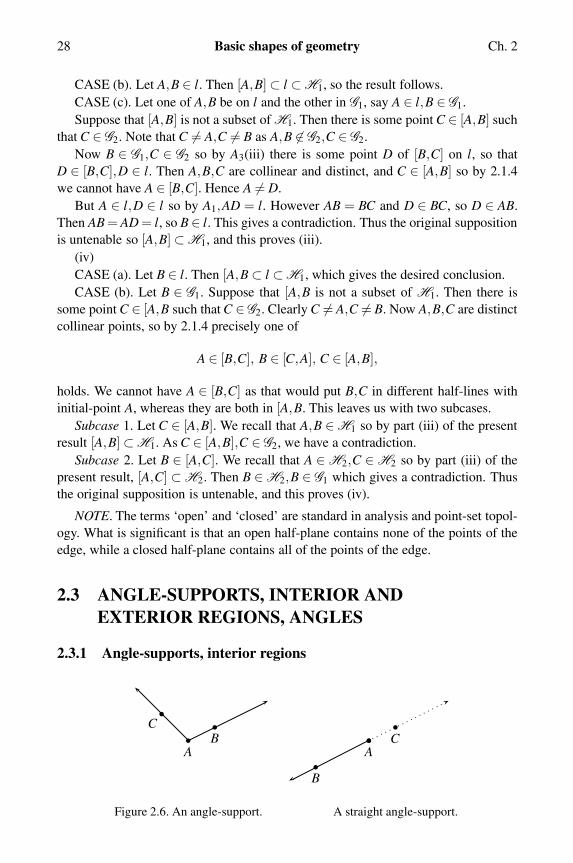
28 Basic shapes of geometry Ch. 2
CASE (b). Let A,B ∈ l. Then [A,B]⊂ l ⊂ H1, so the result follows.CASE (c). Let one of A,B be on l and the other in G1, say A ∈ l,B ∈ G1.Suppose that [A,B] is not a subset of H1. Then there is some point C ∈ [A,B] such
that C ∈ G2. Note that C �= A,C �= B as A,B �∈ G2,C ∈ G2.Now B ∈ G1,C ∈ G2 so by A3(iii) there is some point D of [B,C] on l, so that
D ∈ [B,C],D ∈ l. Then A,B,C are collinear and distinct, and C ∈ [A,B] so by 2.1.4we cannot have A ∈ [B,C]. Hence A �= D.
But A ∈ l,D ∈ l so by A1,AD = l. However AB = BC and D ∈ BC, so D ∈ AB.Then AB= AD = l, so B ∈ l. This gives a contradiction. Thus the original suppositionis untenable so [A,B]⊂ H1, and this proves (iii).
(iv)CASE (a). Let B ∈ l. Then [A,B ⊂ l ⊂ H1, which gives the desired conclusion.CASE (b). Let B ∈ G1. Suppose that [A,B is not a subset of H1. Then there is
some point C ∈ [A,B such that C ∈ G2. Clearly C �= A,C �= B. Now A,B,C are distinctcollinear points, so by 2.1.4 precisely one of
A ∈ [B,C], B ∈ [C,A], C ∈ [A,B],
holds. We cannot have A ∈ [B,C] as that would put B,C in different half-lines withinitial-point A, whereas they are both in [A,B. This leaves us with two subcases.
Subcase 1. Let C ∈ [A,B]. We recall that A,B ∈ H1 so by part (iii) of the presentresult [A,B]⊂ H1. As C ∈ [A,B],C ∈ G2, we have a contradiction.
Subcase 2. Let B ∈ [A,C]. We recall that A ∈ H2,C ∈ H2 so by part (iii) of thepresent result, [A,C] ⊂ H2. Then B ∈ H2,B ∈ G1 which gives a contradiction. Thusthe original supposition is untenable, and this proves (iv).
NOTE. The terms ‘open’ and ‘closed’ are standard in analysis and point-set topol-ogy. What is significant is that an open half-plane contains none of the points of theedge, while a closed half-plane contains all of the points of the edge.
2.3 ANGLE-SUPPORTS, INTERIOR ANDEXTERIOR REGIONS, ANGLES
2.3.1 Angle-supports, interior regions
�
�
�
AB
C
Figure 2.6. An angle-support.
�
�
�
�
A
B
C
A straight angle-support.

Sec. 2.3 Angle-supports, interior and exterior regions, angles 29
Definition . We call a pair {[A,B , [A,C } of co-initial half-lines an angle-support.For this we use the notation |BAC. When A ∈ [B,C], this is called a straight angle-support. We call the half-lines [A,B and [A,C the arms, and the point A the vertex,of |BAC. Note that we are assuming B �=A and C �=A from the definition of half-lines.In all cases we have |BAC = |CAB.
COMMENT. The reason that we do not call |BAC an angle is that there are twoangles associated with this configuration.
�
�
�
AB
C
Figure 2.7. An interior region.
�
�
�
AB
C
The corresponding exterior region.
Definition. Consider an angle-support |BAC which is not straight. When A,B,Care not collinear, let H1 be the closed half-plane with edge AB in which C lies, andH3 the closed half-plane with edge AC in which B lies. Then H1 ∩H3 is called theinterior region of |BAC, and we denote it by I R(|BAC). When A,B,C are collinearwe have [A,B = [A,C and we define I R(|BAC) = [A,B .
Interior regions have the following properties:-
(i) [A,B and [A,C are both subsets of I R(|BAC).
(ii) If P,Q ∈ I R(|BAC) then [P,Q]⊂ I R(|BAC), so that an interior region is aconvex set.
(iii) If P ∈ I R(|BAC) and P �= A, then [A,P ⊂ I R(|BAC).
Proof .(i) When A,B,C are non-collinear, by 2.1.5 [A,B ⊂AB⊂H1 and by 2.2.3 [A,B ⊂
H3 so [A,B ⊂H1 ∩H3. Similarly for [A,C . When [A,B = [A,C the result is trivial.(ii) When A,B,C are non-collinear, we have that [P,Q] is a subset of H1 by 2.2.3.
It is a subset of H3 similarly, and so is a subset of the intersection of these closedhalf-planes. When [A,B = [A,C , the result follows from 2.1.5.
(iii) When A,B,C are non-collinear, by 2.2.3 [A,P is a subset of each of H1 andH3, and so of their intersection. When [A,B = [A,C we have I R(|BAC) = [A ,Band [A,P = [A,B .
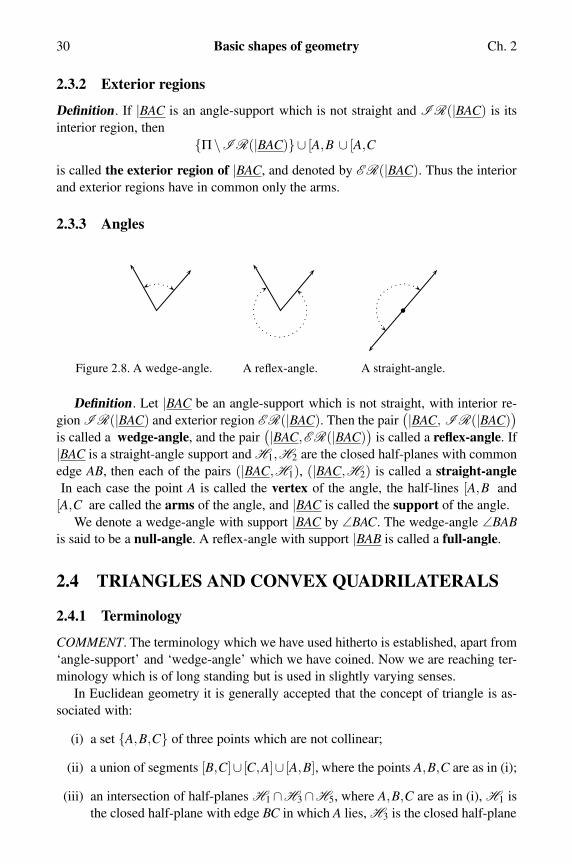
30 Basic shapes of geometry Ch. 2
2.3.2 Exterior regions
Definition . If |BAC is an angle-support which is not straight and I R(|BAC) is itsinterior region, then
{Π\I R(|BAC)}∪ [A,B ∪ [A,C
is called the exterior region of |BAC, and denoted by E R(|BAC). Thus the interiorand exterior regions have in common only the arms.
2.3.3 Angles
Figure 2.8. A wedge-angle. A reflex-angle.
�
A straight-angle.
Definition . Let |BAC be an angle-support which is not straight, with interior re-gion I R(|BAC) and exterior region E R(|BAC). Then the pair
(|BAC, I R(|BAC))
is called a wedge-angle, and the pair(|BAC,E R(|BAC)
)is called a reflex-angle. If
|BAC is a straight-angle support and H1,H2 are the closed half-planes with commonedge AB, then each of the pairs (|BAC,H1), (|BAC,H2) is called a straight-angleIn each case the point A is called the vertex of the angle, the half-lines [A,B and[A,C are called the arms of the angle, and |BAC is called the support of the angle.
We denote a wedge-angle with support |BAC by ∠BAC. The wedge-angle ∠BABis said to be a null-angle. A reflex-angle with support |BAB is called a full-angle.
2.4 TRIANGLES AND CONVEX QUADRILATERALS
2.4.1 Terminology
COMMENT. The terminology which we have used hitherto is established, apart from‘angle-support’ and ‘wedge-angle’ which we have coined. Now we are reaching ter-minology which is of long standing but is used in slightly varying senses.
In Euclidean geometry it is generally accepted that the concept of triangle is as-sociated with:
(i) a set {A,B,C} of three points which are not collinear;
(ii) a union of segments [B,C]∪ [C,A]∪ [A,B], where the points A,B,C are as in (i);
(iii) an intersection of half-planes H1 ∩H3 ∩H5, where A,B,C are as in (i), H1 isthe closed half-plane with edge BC in which A lies, H3 is the closed half-plane

Sec. 2.4 Triangles and convex quadrilaterals 31
with edge CA in which B lies, and H5 is the closed half-plane with edge AB inwhich C lies.
However in some courses the actual definition of a triangle is taken to be (i), inother courses it is taken to be (ii), and in other courses it is taken to be (iii), with (ii)and (iii) very common. In yet other courses a combination of (i) and (ii) is taken.
Having to make a choice for the sake of precision, we opt for (iii); then for us (i)will be the set of vertices of our triangle, and (ii) will be the perimeter of our triangle,with the individual segments being the sides. We shall then be able to refer naturallyto the area of a triangle and the length of its perimeter.
Consideration similar to (i), (ii) and (iii) for a triangle surround each of the termsquadrilateral, parallelogram, rectangle and square, and we adopt our terminologyconsistently.
2.4.2 Triangles
NOTE. Let A,B,C be points which do not lie on one line. Then by A1, A,B,C aredistinct points, and A �∈ BC, B �∈CA, C �∈ AB. In fact these lines are not concurrent;for BC and CA cannot have a point P in common other than P =C, while C �∈ AB.
Definition . For non-collinear points A,B,C let H1 be the closed half-plane withedge BC in which A lies, H3 the closed half-plane with edge CA in which B lies,and H5 the closed half-plane with edge AB in which C lies. Then the intersectionH1 ∩H3 ∩H5 is called a triangle, and is denoted by [A,B,C].
A
BC
Figure 2.9. A triangle [A,B,C].
A
B
CD
Figure 2.10. A convex quadrilateral.
The points A,B,C are called its vertices; the segments [B,C], [C,A], [A,B] are calledits sides; the lines BC,CA,AB are called its side-lines. The union [B,C]∪ [C,A]∪ [A,B]of its sides is called its perimeter. A side and a vertex not contained in it are said tobe opposite; thus A is opposite [B,C] but is not opposite [C,A] or [A,B].
Triangles have the following properties:-
(i) [A,B,C] is independent of the order of the points A,B,C.
(ii) Each of the vertices A,B,C is an element of [A,B,C].
(iii) If P,Q ∈ [A,B,C], then [P,Q]⊂ [A,B,C] so that a triangle is a convex set.

32 Basic shapes of geometry Ch. 2
(iv) Each of the sides [B,C], [C,A], [A,B] is a subset of [A,B,C].
Proof . (i) As ∩ is commutative, H1 ∩H3 ∩H5 is independent of the order ofH1,H3,H5.
(ii) The vertex A is in H1 by definition. It is also in the edge of each of H3 andH5, so by 2.2.3 it is in each of these closed half-planes. The vertices B and C aretreated similarly.
(iii) By definition of an intersection, P and Q are in each of H1,H3,H5. By2.2.3, [P,Q] is a subset of each of these closed half-planes, and so it is a subset oftheir intersection.
(iv) This follows from parts (ii) and (iii) of the present result.
2.4.3 Pasch’s property, 1882
Pasch’s property. If a line cuts one side of a triangle, not at a vertex, then it willeither pass through the opposite vertex, or cut one of the other two sides.
Proof . Let [A,B,C] be the triangle and l a line which cuts the side [A,B] at a pointwhich is not a vertex. If C ∈ l we have the first conclusion. Otherwise suppose that ldoes not cut [B,C]. Then A and B are on different sides of l, but B and C are on thesame side of l. It follows that A and C are on different sides if l, so by A3(iii) a pointof [A,C] lies on l.
2.4.4 Convex quadrilaterals
Definition . Let A,B,C,D be four points in Π, no three of which are collinear, andsuch that [A,C]∩ [B,D] �= /0. Let H1 be the closed half-plane with edge AB in whichD lies, H3 the closed half-plane with edge BC in which A lies, H5 the closed half-plane with edge CD in which B lies, and H7 the closed half-plane with edge DA inwhich C lies. Then the intersection H1 ∩H3 ∩H5 ∩H7 of these four half-planes iscalled a convex quadrilateral, and we denote it by [A,B,C,D]. As each of the closedhalf-planes is a convex set this intersection is also a convex set.
Each of the four points A,B,C,D is called a vertex; the segments [A,B], [B,C],[C,D], [D,A] are called the sides, and AB,BC,CD,DA are called the side-lines ; theunion of the sides [A,B]∪ [B,C]∪ [C,D]∪ [D,A] is called the perimeter. The segments[A,C], [B,D] are called the diagonals, and AC,BD the diagonal lines. Vertices whichare the end-points of a side are called adjacent while vertices which are the end-points of a diagonal are called opposite; thus A and B are adjacent as [A,B] is a side,and A and C are opposite as [A,C] is a diagonal. Sides which have a vertex in commonare said to be adjacent while sides which do not have a vertex in common are said tobe opposite; thus the sides [A,B], [A,D] are adjacent as the vertex A is in both, whilethe sides [A,B], [C,D] are opposite as neither C nor D is in AB and so neither of themcould be A or B.

Sec. 2.4 Triangles and convex quadrilaterals 33
If we write
D/ \
A C\ /
B
then two vertices in [A,B,C,D] will be adjacent if the letters for them in this diagramare linked.
Exercises
2.1 Let P be a fixed point in Π. Identify the union of all lines l ∈ Λ such that P ∈ l.
2.2 Prove that segments have the following properties:-
(i) If C ∈ [A,B], then [A,C]∪ [C,B] = [A,B] and [A,C]∩ [C,B] = {C}.
(ii) If C ∈ [A,B] and B ∈ [A,C] then B =C.
(iii) If C ∈ [A,B] and D ∈ [A,C], then C ∈ [D,B].
(iv) If B �= A, B ∈ [A,C] and B ∈ [A,D], then either C ∈ [B,D] or D ∈ [B,C].
2.3 Prove that half-lines have the following properties:-
(i) If B ∈ ρ(l,A,≤l), then ρ(l,B,≤l)⊂ ρ(l,A,≤l).
(ii) If B ∈ ρ(l,A,≤l), then ρ(l,A,≤l) = [A,B]∪ρ(l,B,≤l) and[A,B]∩ρ(l,B,≤l) = {B}.
(iii) Let B ∈ ρ(l,A,≤l),A �= B and A ∈ [B,C]. Then C ∈ ρ(l,A,≤l) only ifC = A.
(iv) Let B ∈ ρ(l,A,≤l) and A �= B. Then C ∈ ρ(l,A,≤l) if and only if eitherB ∈ [A,C] or C ∈ [A,B].
(v) In all cases
ρ(l,A,≤l)∪ρ(l,A,≥l) = l and ρ(l,A,≤l)∩ρ(l,A,≥l) = {A}.
(vi) Let B ∈ ρ(l,A,≤l) and A �= B. Then C ∈ ρ(l,A,≥l) if and only if A ∈[B,C].
(vii) Let B ∈ ρ(l,A,≤l) and A �= B. Then
ρ(l,A,≤l)∪ρ(l,B,≥l) = l, ρ(l,A,≤l)∩ρ(l,B,≥l) = [A,B],
ρ(l,A,≥l)∩ρ(l,B,≤l) = /0, ρ(l,A,≥l)∪ρ(l,B,≤l)∪ [A,B] = l.
(viii) If A �= B,A �=C and C ∈ [A,B, then [A,B = [A,C .

34 Basic shapes of geometry Ch. 2
2.4 If [A,B], [C,D] are both segments of a line l such that [A,B]∩ [C,D] �= /0, showthat [A,B]∩ [C,D] and [A,B]∪ [C,D] are both segments.
2.5 Show that if A �=B and C,D are both in AB\ [A,B], then either [A,B]∩ [C,D] = /0or [A,B]⊂ [C,D].
2.6 Let ≤E be a total order on the set E and f : E → F a 1:1 onto function. If fora,b ∈ F,a ≤F b when f−1(a) ≤E f−1(b), show that ≤F is a total order on F .
2.7 Use Ex.2.6 to show that if F is an infinite set and there is a total order on F ,then there are infinitely many total orders on F .
2.8 Show that interior regions have the following properties:-
(i) If P ∈ I R(|BAC) and P �= A, then AP∩I R(|BAC) = [A,P .
(ii) If A,B,C are non-collinear and U ∈ [A,B , V ∈ [A,C but neither U nor Vis A, then UV ∩I R(|BAC) = [U,V ].
(iii) If A,U,V are distinct collinear points, and U and V are both inI R(|BAC), then V ∈ [A,U .
2.9 Show that an exterior region has the following properties:-
(i) The arms [A,B and [A,C are both subsets of E R(|BAC).
(ii) If P ∈ E R(|BAC) and P �= A, then [A,P ⊂ E R(|BAC).
2.10 Show that convex quadrilaterals [A,B,C,D] have the following properties:-
(i) Each of
〈2〉[A,D,C,B], 〈3〉[C,B,A,D], 〈4〉[C,D,A,B],
〈5〉[B,A,D,C], 〈6〉[B,C,D,A], 〈7〉[D,A,B,C],
〈8〉[D,C,B,A],
is equal to 〈1〉[A,B,C,D].
(ii) Each of the vertices A,B,C,D is an element of [A,B,C,D].
(iii) The lines AC and BD cannot have distinct points E and F in common.
(iv) Each side and each diagonal is a subset of [A,B,C,D].
(v) Any pair of opposite sides are disjoint.
2.11 For non-collinear points A, B, D let C be a point which is in the interior regionI R(|BAD) but not in [A,B , [A,D or [A,B,D]. Show that then A,B,C,D arethe vertices of a convex quadrilateral.

3
Distance; degree-measure of anangle
COMMENT. In this chapter we introduce distance as a primitive concept, relate it tothe properties of segments, and define the notion of the mid-point of two points. Wealso introduce as a primitive concept the notion of the degree-measure of a wedge-angle and of a straight-angle, relate it to the properties of interior-regions and half-planes, and define the notion of the mid-line of an angle-support.
3.1 DISTANCE
3.1.1 Axiom for distance
Notation. We denote by R the set of real numbers.Primitive Term . There is a function | | : Π×Π → R called distance. We read
|A,B| as the distance from A to B. We also refer to |A,B| as the length of the segment[A,B].
AXIOM A4. Distance has the following properties:-
(i) |A,B| ≥ 0 for all A,B ∈ Π;
(ii) |A,B|= |B,A| for all A,B ∈ Π;
(iii) If Q ∈ [P,R], then |P,Q|+ |Q,R|= |P,R|;(iv) Given any k ≥ 0 in R, any line l ∈ Λ, any point A ∈ l and either natural order
≤l on l, there is a unique point B ∈ l such that A ≤l B and |A,B| = k, and aunique point C ∈ l such that C ≤l A and |A,C|= k. |
COMMENT. Note that A4(iv) states that we can lay off a distance k, uniquely, onl on either side of A. The fact that different letters A,B,C are used is not to be takenas a claim that A,B,C are distinct in all cases. Axiom A4(iv) implies that each line l
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50003-3

36 Distance; degree-measure of an angle Ch. 3
contains infinitely many points and this supersedes the specification in A1 that l �= /0;nevertheless it was convenient to stipulate the latter to avoid a trivial situation. InA4(iii) addition + of real numbers is involved.
�
�
�
PQ
Rx
y
x+y
Figure 3.1. Addition of distances.
�
�
A
Bk
Laying off a distance k.
3.1.2 Derived properties of distance
Distance has the following properties:-
(i) For all A ∈ Π |A,A|= 0, and we have |A,B|> 0 if A �= B.
(ii) If P ∈ [A,B], then |A,P| ≤ |A,B|. If additionally P �= B, then |A,P|< |A,B|.(iii) If A �=C and B lies on the line AC but outside the segment [A,C], then
|A,B|+ |B,C|> |A,C|.
(iv) If C ∈ [A,B is such that |A,B|< |A,C|, then B ∈ [A,C].
Proof .(i) By A4(iii) with P = Q = A and any R ∈ Π, we have |A,A|+ |A,R|= |A,R|, i.e.
x+ y = y where x = |A,A| and y = |A,R|. It follows that x = 0.Next with A �= B let l = AB and ≤l be the natural order on l for which A ≤l B.
Then we haveA ≤l B, A ≤l A, |A,A|= 0,
so that if we also had |A,B|= 0, then by the uniqueness part of A4(iv) with k = 0, wewould have A = B and so have a contradiction. To avoid this we must have |A,B|> 0.
(ii) As P∈ [A,B], by A4(iii) we have |A,P|+ |P,B|= |A,B|. But by A4(i) |P,B| ≥ 0and so |A,P| ≤ |A,B|. If P �= B, then by (i) of the present theorem |P,B| > 0 and so|A,P|< |A,B|.
(iii) As B �∈ [A,C] we have B �= A,B �=C and so by 2.1.4 we have either A ∈ [B,C]or C ∈ [A,B]. In the first of these |B,A|+ |A,C| = |B,C| by A4(iii) and as |A,B| =|B,A| > 0 this gives |A,C| < |B,C| < |A,B|+ |B,C|. In the second case we have|A,C|+ |C,B| = |A,B| by A4(iii) and as |C,B| = |B,C| > 0, then |A,C| < |A,B| <|A,B|+ |B,C|.

Sec. 3.1 Distance 37
(iv) We have A �= B by definition of [A,B , and A �= C as 0 < |A,B| < |A,C| sothat 0 < |A,C|. We also have B �= C as |A,B| < |A,C| combined with B = C wouldgive |A,B|< |A,B|, whereas once (A,B) is known |A,B| is uniquely determined. Wecannot have A ∈ [B,C] as C ∈ [A,B . Then by 2.1.4 either B ∈ [C,A] or C ∈ [A,B].But by (ii) of the present result, if C ∈ [A,B] we would have |A,C| ≤ |A,B|. As this isruled out by assumption, we must have B ∈ [A,C].
Segments and half-lines have the following further properties:-
(i) Let l ∈ Λ be a line, A ∈ l and ≤l a natural order on l. Then there are points Band C on l such that A ≤l B and B �= A, and such that C ≤l A and C �= A.
(ii) If A �= B, there are points X ∈ [A,B] such that X �= A and X �= B.
(iii) If [A,B = [C,D then A =C.
�
�
�
C
AB
Figure 3.2.
�
�
�
A
XB
Proof.
(i) By A4(iv) with any k > 0, there is some B ∈ l such that A ≤l B and |A,B|= k.As |A,B|> 0, we have A �= B. Proof for the existence of C is similar.
(ii) Let ≤l be the natural order on l = AB for which A ≤l B. As A �= B we have|A,B|> 0 and then with any k such that 0 < k < |A,B|, there is a point X ∈ l such thatA ≤l X and |A,X| = k. As |A,X| �= 0, we have A �= X ; as |A,X|< |A,B| then X �= B.As X ∈ [A,B and |A,X|< |A,B|, we have X ∈ [A,B].
(iii) With the notation of (ii), P∈ [A,B if and only if A ≤l P. Now C ∈ [C,D = [A,Bso A ≤l C; similarly A ≤l D.
CASE 1. Let C ≤l D, so that [C,D = {Q ∈ l : C ≤l Q}. As A ∈ [A,B = [C,D wehave C ≤l A and this combined with A ≤l C implies A =C.
CASE 2. Let D ≤l C. Then [C,D = {Q ∈ l : Q ≤l C}. By (i) of the present resultthere is an X ∈ l such that X ≤l A and X �= A. Then X ≤l A,A ≤l C so X ≤l C and thusX ∈ [C,D . However X �∈ [A,B as otherwise we would have A ≤l X which combinedwith X ≤l A implies X = A and involves a contradiction. Then X ∈ [C,D , X �∈ [A,Bwhich contradicts the fact that [A,B = [C,D and so this case cannot occur.

38 Distance; degree-measure of an angle Ch. 3
�
�
�
A =C
DB
Figure 3.3.
��
�
�
�
AC
B
XD
3.2 MID-POINTS
3.2.1
If A �= B there is a unique point X on l = AB such that |A,X| = |X,B|. In this in factX ∈ [A,B] and X �= A,X �= B.
Proof .Existence. Let ≤l be the natural order on l for which A ≤l B. With k = 1
2 |A,B|, byA4(iv) there is a point X on l such that A ≤l X and |A,X|= 1
2 |A,B|. Clearly X ∈ [A,B .As |A,B|> 0 we have |A,X|< |A,B|; by 3.1.2 this implies that X ∈ [A,B], X �= B. ByA4(iii) |A,X|+ |X,B|= |A,B| and so |X,B|= |A,B|− 1
2 |A,B|= 12 |A,B|. Thus |A,X|=
|X,B| as required. We have already seen that X ∈ [A,B] and X �= B; as |A,X|> 0 wealso have X �= A.
Uniqueness. Suppose now that Y ∈ l and |A,Y| = |Y,B|. Then Y cannot be A orB, as e.g. Y = A implies that |A,A|= |A,B|, i.e. 0 = |A,B|. Thus by 2.1.4 one of
Y ∈ [A,B], A ∈ [Y,B], B ∈ [A,Y ],
holds. The second of these would imply |Y,A|+ |A,B|= |Y,B| and so |Y,A|< |Y,B|as |A,B| > 0. The third of these would imply |A,B|+ |B,Y| = |A,Y| and so |B,Y| <|A,Y|. As these contradict our assumptions, we must have Y ∈ [A,B]. Then |A,Y|+|Y,B| = |A,B| and as |A,Y| = |Y,B| this implies that |A,Y| = 1
2 |A,B|. Then A ≤l
X ,A ≤l Y and |A,X|= |A,Y| so by the uniqueness in A4(iv) we must have X = Y .Definition . Given any pointsA,B ∈ Π, we define the mid-point of A and B as follows: ifA = B then the mid-point is A;when A �= B the mid-point is theunique point X on the line ABsuch that |A,X| = |X,B|, whichhas just been guaranteed. We de-note the mid-point of A and B bymp(A,B).
�
�
�
A
X
B
+
+
Figure 3.4. Mid-point of A and B.
Mid-points have the following properties:-
(i) For all A,B ∈ Π, mp(A,B) = mp(B,A).

Sec. 3.3 A ratio result 39
(ii) For all A,B ∈ Π, mp(A,B) ∈ [A,B].
(iii) In all cases mp(A,A) = A, and mp(A,B) �= A, mp(A,B) �= B when A �= B.
(iv) Given any points P and Q in Π, there is a unique point R ∈ Π such that Q =mp(P,R).
Proof .(i) When A �= B this follows from the definition and A4(ii); when A = B it is
immediate.(ii) When A �= B this follows from the preparatory result. When A = B it amounts
to A ∈ {A}.(iii) This follows from the definition and preparatory result.(iv) Existence. If Q = P we take R = P and then mp(P,R) = mp(P,P) = P = Q.
Suppose then that P �= Q, let l = PQ and let ≤l be the natural order on l under whichP≤l Q. Take R on l so that P ≤l R and |P,R|= 2|P,Q|. Then P precedes both Q and Ron l, while |P,Q|= 1
2 |P,R|. By our initial specification of X in the preparatory resultwe see that Q = mp(P,R).
Uniqueness. Suppose that also Q = mp(P,S). We again first take Q = P. Now inthe preparatory result we had X �= A, so that cannot be the situation here as Q = P;thus we must have S = P and so S = R. Next suppose that Q �= P; then we cannothave S = P, as we had X �= A. Then Q ∈ PS, so by A1 S ∈ PQ. In fact Q ∈ [P,S] soas P ≤l Q we must have P ≤l S; moreover |P,R|= |P,S| as each is twice the distance|P,Q|. By the uniqueness in A4(iv) we must then have R = S.
3.3 A RATIO RESULT
3.3.1
Let A,B,C be distinct collinear points, and write
|A,C||A,B| = r,
|A,C||C,B| = s.
Then if C ∈ [A,B] we have
s =r
1− r, r =
s1+ s
.
Proof . Let |A,C|= x, |C,B|= y. As C ∈ [A,B] we have |A,B|= x+ y. Then
xx+ y
= r so thatx+ y
x=
1r.
Henceyx=
1r−1 and so
xy=
|A,C||C,B| =
r1− r
.

40 Distance; degree-measure of an angle Ch. 3
In turns =
r1− r
and so s− sr = r,
giving
s = r(1+ s) and thus r =s
1+ s.
3.4 THE CROSS-BAR THEOREM
3.4.1
The cross-bar theorem. Let A,B,C be non-collinear points, X �= A any point on[A,B and Y �= A any point on [A,C . If D �= A is any point in the interior regionI R(|BAC), then [A,D ∩ [X ,Y ] �= /0.
Proof . If D is on [A,B or[A,C the result is clear, sowe turn to other cases. By3.1.2 there is a point E �=A such that A ∈ [E,X ].Thus X and E are on dif-ferent sides of the line AC.
�
�
�
�
�
�
�
�
�
�
AB
X
Y
C
D
E
Figure 3.5. The Cross-Bar Theorem.
Then by 2.2.3(iv) every point of [Y,E (other than Y ) is on one side of AC, whileevery point of [A,D (other than A) is on a different side of AC; thus [A,D doesnot meet [Y,E]. Moreover the other points of the line AD are on one side of theline AB, while the points of [E,Y (other than E) are on the other side of AB. Oncombining these two, we see that the line AD does not meet the side [E,Y ] of thetriangle [E,X ,Y ]. As AD does meet the side [E,X ] of that triangle, we see by 2.4.3that AD must meet the third side [X ,Y ] of that triangle at some point F . As F ∈[X ,Y ]⊂ I R(|BAC), F must be on the part of AD in I R(|BAC), that is F ∈ [A,D .
3.5 DEGREE-MEASURE OF ANGLES
3.5.1 Axiom for degree-measure
Primitive Term . There is a function | |◦ on the set of all wedge-angles and straight-angles, into R. Thus with each angle α , either a wedge-angle α =∠BAC or a straight-angle with support |BAC, there is associated a unique real number |α |◦, called itsdegree-measure.
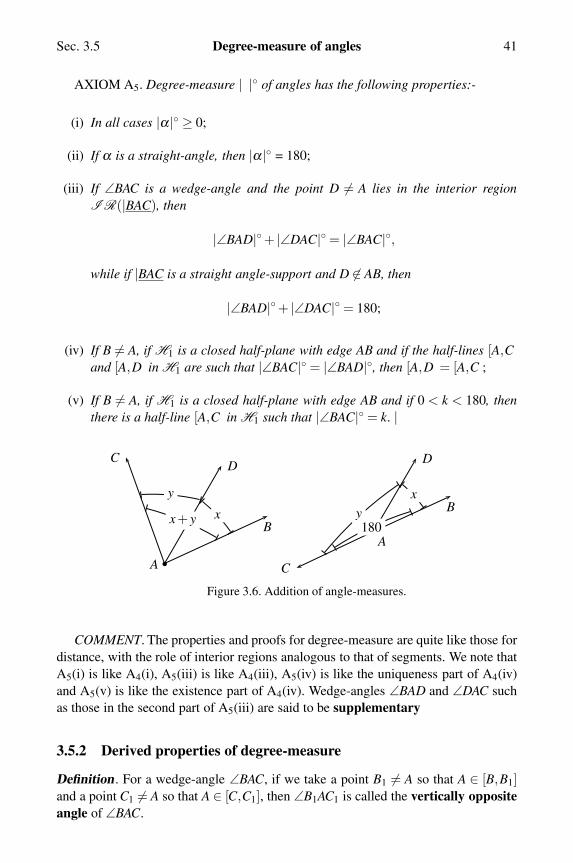
Sec. 3.5 Degree-measure of angles 41
AXIOM A5. Degree-measure | |◦ of angles has the following properties:-
(i) In all cases |α |◦ ≥ 0;
(ii) If α is a straight-angle, then |α |◦ = 180;
(iii) If ∠BAC is a wedge-angle and the point D �= A lies in the interior regionI R(|BAC), then
|∠BAD|◦+ |∠DAC|◦ = |∠BAC|◦,
while if |BAC is a straight angle-support and D �∈ AB, then
|∠BAD|◦+ |∠DAC|◦ = 180;
(iv) If B �= A, if H1 is a closed half-plane with edge AB and if the half-lines [A,Cand [A,D in H1 are such that |∠BAC|◦ = |∠BAD|◦, then [A,D = [A,C ;
(v) If B �= A, if H1 is a closed half-plane with edge AB and if 0 < k < 180, thenthere is a half-line [A,C in H1 such that |∠BAC|◦ = k. |
�A
B
DC
x
y
x+ y
Figure 3.6. Addition of angle-measures.
�
A
B
D
C
x
y180
COMMENT. The properties and proofs for degree-measure are quite like those fordistance, with the role of interior regions analogous to that of segments. We note thatA5(i) is like A4(i), A5(iii) is like A4(iii), A5(iv) is like the uniqueness part of A4(iv)and A5(v) is like the existence part of A4(iv). Wedge-angles ∠BAD and ∠DAC suchas those in the second part of A5(iii) are said to be supplementary
3.5.2 Derived properties of degree-measure
Definition . For a wedge-angle ∠BAC, if we take a point B1 �= A so that A ∈ [B,B1]and a point C1 �= A so that A ∈ [C,C1], then ∠B1AC1 is called the vertically oppositeangle of ∠BAC.

42 Distance; degree-measure of an angle Ch. 3
�A
B
C
H1
k
Figure 3.7. Laying off an angle.
�
�
�
�
�
� AB
C
B1
C1
Figure 3.8. Opposite angles at a vertex.
Degree-measure has the properties:-
(i) The null-angle ∠BAB has degree-measure 0.
(ii) For any non-null wedge-angle ∠BAC, we have 0 < |∠BAC|◦ < 180.
(iii) If ∠B1AC1 is the angle vertically opposite to ∠BAC, then
|∠B1AC1|◦ = |∠BAC|◦,so that vertically opposite angles have equal degree-measures.
Proof .(i) Let C be a point not on AB. Then by A5(iii) with D = B,
|∠BAB|◦+ |∠BAC|◦ = |∠BAC|◦.It follows that |∠BAB|◦ = 0.
(ii) Given any non-null wedge-angle ∠BAC, let H1 be the closed half-plane withedge AB in which C lies. If we had |∠BAC|◦ = 0, then we would have |∠BAC|◦ =|∠BAB|◦ and so by A5(iv) we would have [A,C = [A,B . This would imply that ∠BACis null, contrary to assumption. Then by A5(i) |∠BAC|◦ > 0.
Now choose the point E �= A so that A ∈ [B,E]. Then by A5(iii), as we have sup-plementary angles,
|∠BAC|◦+ |∠CAE|◦ = 180.
But [A,E �= [A,C as ∠BAC is a wedge-angle, so ∠CAE is not a null-angle. By thelast paragraph we then have |∠CAE|◦ > 0 and it follows that |∠BAC|◦ < 180.
(iii) As |BAB1, |CAC1 are straight we have
|∠BAC|◦+ |∠CAB1|◦ = 180,
|∠CAB1|◦+ |∠B1AC1|◦ = 180,
there being two pairs of supplementary angles. It follows that
|∠BAC|◦+ |∠CAB1|◦ = |∠CAB1|◦+ |∠B1AC1|◦,from which we conclude by subtraction that |∠BAC|◦ = |∠B1AC1|◦.

Sec. 3.5 Degree-measure of angles 43
Degree-measure has the further properties:-
(i) If ∠BAC is a wedge-angle and D �= A is in I R(|BAC), then |∠BAD|◦ ≤|∠BAC|◦. If, further, D �∈ [A,C then |∠BAD|◦ < |∠BAC|◦.
(ii) For non-collinear points A,B,C let H1 be the closed half-plane with edge AB inwhich C lies. If D �=A is in H1 and |∠BAD|◦ ≤ |∠BAC|◦, then D∈I R(|BAC).
�
�
�
�
�
AB
C DH1
Figure 3.9.
�
�
�
�
��
AB
C D
E
H1
H3H4
Proof .(i) As D ∈ I R(|BAC), by A5(iii) |∠BAD|◦ + |∠DAC|◦ = |∠BAC|◦. By A5(i),
|∠DAC|◦ ≥ 0 so |∠BAD|◦ ≤ |∠BAC|◦.If D �∈ [A,C then ∠DAC is not a null-angle, so |∠DAC|◦> 0 and hence |∠BAD|◦<
|∠BAC|◦.(ii) Let E �= A be such that A ∈ [B,E]. Let H3,H4 be the closed half-planes with
common edge AC, with B ∈ H3 and E ∈ H4. Then
H1 = H1 ∩Π = H1 ∩ (H3 ∪H4) = (H1 ∩H3)∪ (H1 ∩H4)
= I R(|BAC)∪I R(|EAC).
As D ∈ H1, then either D ∈ I R(|BAC) or D ∈ I R(|EAC).Now suppose that D �∈ I R(|BAC), so that D ∈ I R(|EAC) and D �∈ [A,C . By
A5(iii),
|∠EAD|◦+ |∠DAC|◦ = |∠EAC|◦.
Hence by A5(iii), as we have supplementary pairs of angles,
180−|∠BAD|◦+ |∠DAC|◦ = 180−|∠BAC|◦.
From this
|∠BAC|◦+ |∠DAC|◦ = |∠BAD|◦,
and as |∠DAC|◦ > 0, we have |∠BAC|◦ < |∠BAD|◦. This gives a contradiction withour hypothesis.

44 Distance; degree-measure of an angle Ch. 3
3.6 MID-LINE OF AN ANGLE-SUPPORT
3.6.1 Right-angles
Definition . Given any point P �= A of a line AB, by A5(v) there is a half-line [P,Qsuch that |∠APQ|◦ = 90. Then ∠APQ is called a right-angle.
If R �= P is such that P ∈ [A,R] then ∠RPQ is also a right-angle. For |APR is astraight angle-support, so having supplementary angles,
|∠APQ|◦+ |∠QPR|◦ = 180.
As |∠APQ|◦ = 90 it follows that |∠RPQ|◦ = 180−90 = 90.
3.6.2 Perpendicular lines
Definition . If l,m are lines in Λ, we say that l is perpendicularto m, written l ⊥ m,if l meets m at some point P and if A �= P is on l, and Q �= P is on m, then ∠APQ is aright-angle.
COMMENT. In 3.6.1, we say that a perpendicular PQ has been erected to theline AB at the point P on it.
Perpendicularity has the following properties:-
(i) If l ⊥ m, then m ⊥ l.
(ii) If l ⊥ m, then l �= m and l ∩m �= /0.
Proof .These follow immediately from the definition of perpendicularity.
�
�
�
PA
Q90
Figure 3.10. Perpendicular lines.
�
� �
�
�
A B
C P
P′
Mid-line of an angle-support.

Sec. 3.6 Mid-line of an angle-support 45
3.6.3 Mid-lines
Given any angle-support |BAC such that C �∈ [A,B , there is a unique line l such thatA ∈ l and for all P �= A but P ∈ l, |∠BAP|◦ = |∠PAC|◦.
Proof . Existence.This was already shown in 3.6.1 in the case when |BAC is straight, so we may
assume that A,B,C are non-collinear.By A5(v) and 3.5.2, as 0 < |∠BAC|◦ < 180 and so 0 < 1
2 |∠BAC|◦ < 90, there is ahalf-line [A,P with P on the same side of AB as C is, such that |∠BAP|◦ = 1
2 |∠BAC|◦.Then [A,P ⊂ I R(|BAC) by 3.5.2, so by A5(iii)
|∠BAP|◦+ |∠PAC|◦ = |∠BAC|◦.
�
�
�
��
� A B
C
PB1
H1
H3H4
�
�
�
��
�
AB
C PB1
H1
H3H4
Figure 3.11.
It follows that
|∠PAC|◦ = |∠BAC|◦ − 12|∠BAC|◦ = 1
2|∠BAC|◦
and so |∠BAP|◦ = |∠PAC|◦.If P′ �= A is such that A ∈ [P,P′], then by A5(iii)
|∠BAP′|◦ = 180−|∠BAP|◦ = 180−|∠PAC|◦ = |∠P′AC|◦.
Uniqueness.When |BAC is straight, by A5(iii) 2|∠BAP|◦ = 180 so |∠BAP|◦ = 90. By A5(iv)
this determines l uniquely. For the remainder we suppose then that we have a wedge-angle ∠BAC.
Let H1,H2 be the closed half-planes with common edge AB, with C ∈ H1, andH3,H4 be the closed half-planes with common edge AC, with B ∈ H3. Let B1 �= Abe such that A ∈ [B,B1].
Now if l contains a point Q �= A in H4 it will also contain a point R �= A of H3,so we may assume that l contains a point P �= A of H3. As
H1 =H1 ∩Π = H1 ∩ (H3 ∪H4) = (H1 ∩H3)∪ (H1 ∩H4)
=I R(|BAC)∪I R(|B1AC),
we then have P ∈ I R(|BAC) or P ∈ I R(|B1AC).We get a contradiction if l is either AB or AC. For if l = AB, then we have
|∠BAP|◦ = 0, |∠PAC|◦ > 0. Similarly if l = AC.
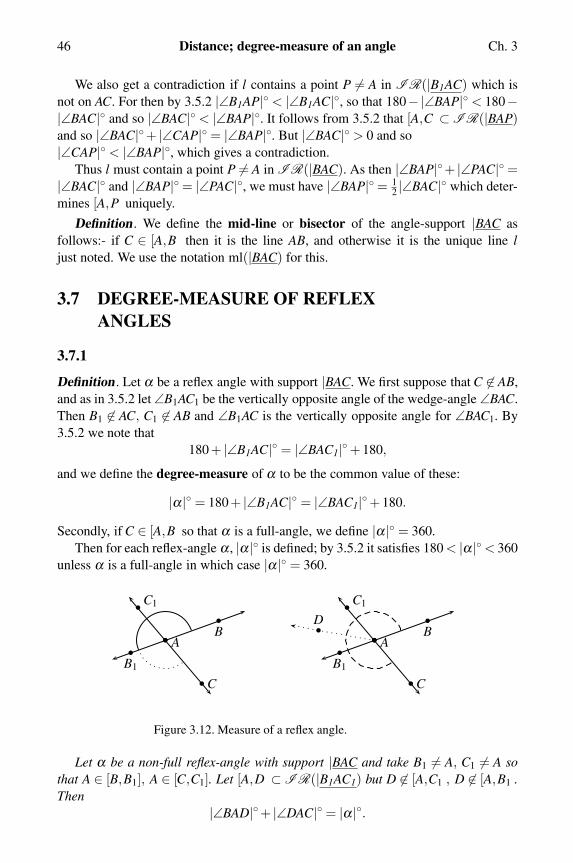
46 Distance; degree-measure of an angle Ch. 3
We also get a contradiction if l contains a point P �= A in I R(|B1AC) which isnot on AC. For then by 3.5.2 |∠B1AP|◦ < |∠B1AC|◦, so that 180−|∠BAP|◦ < 180−|∠BAC|◦ and so |∠BAC|◦ < |∠BAP|◦. It follows from 3.5.2 that [A,C ⊂ I R(|BAP)and so |∠BAC|◦+ |∠CAP|◦ = |∠BAP|◦. But |∠BAC|◦ > 0 and so|∠CAP|◦ < |∠BAP|◦, which gives a contradiction.
Thus l must contain a point P �= A in I R(|BAC). As then |∠BAP|◦+ |∠PAC|◦ =|∠BAC|◦ and |∠BAP|◦ = |∠PAC|◦, we must have |∠BAP|◦ = 1
2 |∠BAC|◦ which deter-mines [A,P uniquely.
Definition . We define the mid-line or bisector of the angle-support |BAC asfollows:- if C ∈ [A,B then it is the line AB, and otherwise it is the unique line ljust noted. We use the notation ml(|BAC) for this.
3.7 DEGREE-MEASURE OF REFLEXANGLES
3.7.1
Definition . Let α be a reflex angle with support |BAC. We first suppose that C �∈ AB,and as in 3.5.2 let ∠B1AC1 be the vertically opposite angle of the wedge-angle ∠BAC.Then B1 �∈ AC, C1 �∈ AB and ∠B1AC is the vertically opposite angle for ∠BAC1. By3.5.2 we note that
180+ |∠B1AC|◦ = |∠BAC1|◦+180,
and we define the degree-measure of α to be the common value of these:
|α |◦ = 180+ |∠B1AC|◦ = |∠BAC1|◦+180.
Secondly, if C ∈ [A,B so that α is a full-angle, we define |α |◦ = 360.Then for each reflex-angle α , |α |◦ is defined; by 3.5.2 it satisfies 180< |α |◦ < 360
unless α is a full-angle in which case |α |◦ = 360.
�
�
�
�
�
�
AB
C1
B1
C
Figure 3.12. Measure of a reflex angle.
�
�
�
�
�
�
�
�
AB
C1
B1
C
D
Let α be a non-full reflex-angle with support |BAC and take B1 �= A, C1 �= A sothat A ∈ [B,B1], A ∈ [C,C1]. Let [A,D ⊂ I R(|B1AC1) but D �∈ [A,C1 , D �∈ [A,B1 .Then
|∠BAD|◦+ |∠DAC|◦ = |α |◦.

Sec. 3.7 Degree-measure of reflex angles 47
Proof . As [A,D ⊂ I R(|B1AC1), D is in the closed half-plane with edge ABin which C1 lies, and also in the closed half-plane with edge AC in which B1 lies.By 3.5.2, |∠B1AD|◦ < |∠B1AC1|◦ so by A5(iii) |∠BAC1|◦ < |∠BAD|◦. By 3.5.2 then[A,C1 ⊂ I R(|BAD), and by similar reasoning [A,B1 ⊂ I R(|DAC). Then
|∠BAD|◦+ |∠DAC|◦ = |∠BAD|◦+(|∠DAB1|◦+ |∠B1AC|◦)= (|∠BAD|◦+ |∠DAB1|◦)+ |∠B1AC|◦= 180+ |∠B1AC|◦ = |α |◦.
COMMENT. We could use this last result to employ the measures of reflex-anglesto a significant extent, but in fact do not do so until our full treatment of them inChapter 9.
Exercises
3.1 If B ∈ [A,C], then |A,B| ≤ |A,P| ≤ |A,C| for all P ∈ [B,C].
3.2 Let A,B,C be points of a line l, and M = mp(A,B). If C is A or B, or if C ∈l \ [A,B], then |C,A|+ |C,B|= 2|C,M|.
3.3 Let A,B,C be distinct points and D = mp(B,C), E = mp(C,A), F = mp(A,B).Prove that D,E,F are distinct. If A �∈ BC, show that neither E nor F belongs toBC.
3.4 If A �= B, show that
{P ∈ AB : |B,A|+ |A,P|= |B,P|}
is the half-line of AB with initial-point A which does not contain B, while
[A,B = {P ∈ AB : |A,P|+ |P,B|= |A,B| or |A,B|+ |B,P|= |A,P|}.
3.5 Find analogues of 3.3.1 when A ∈ [B,C] and when B ∈ [C,A].
3.6 Show that if A,B,C,D are distinct collinear points such that C ∈ [A,B],B ∈ [A,D], and
|A,C||C,B| =
|A,D||D,B| ,
then1
|A,C| +1
|A,D| =2
|A,B| .
3.7 Show that if A,B,C are non-collinear points, and P �= A is a point ofI R(|BAC), then
I R(|BAP)∪I R(|PAC) = I R(|BAC), I R(|BAP)∩I R(|PAC) = [A,P .

48 Distance; degree-measure of an angle Ch. 3
3.8 Show that if d is any positive real number and | | is a distance function, thend| | is also a distance function.
3.9 If α is the reflex angle with support |BAC and β is the reflex angle with support|BAF, show that if [A,F ⊂ I R(|BAC) then
|α |◦+ |∠CAF|◦ = |β |◦.
3.10 Prove that if l = ml(|BAC) and m = ml(|BAC1) where A ∈ [C,C1], then l ⊥ m.
3.11 Suppose that B,C,B1 and C1 are points distinct from A and that A ∈ [B,B1],A ∈ [C,C1]. Show that then ml(|B1AC1) = ml(|BAC).

4
Congruence of triangles; parallellines
COMMENT. In this chapter we deal with the notion of congruence of triangles, andmake a start on the concept of parallelism of lines. As we have distance and angle-measure, we do not need special concepts of congruence of segments and congruenceof angles, and we are able to define congruence of triangles instead of having it as aprimitive term as in the traditional treatment. As a consequence there is a great gainin effectiveness and brevity.
4.1 PRINCIPLES OF CONGRUENCE
4.1.1 Congruence of triangles
Ax
B
y Cz
A′x
B′y
C′z|
|| |
|| |
|| |
| |
Figure 4.1. Congruent triangles.
Definition . Let T be a triangle with the vertices {A,B,C} and T ′ a triangle withvertices {A′,B′,C′}. We say that T is congruent to T ′ in the correspondence A →A′, B → B′, C →C′, if
|B,C|= |B′,C′|, |C,A|= |C′,A′|, |A,B|= |A′,B′|,|∠BAC|◦ = |∠B′A′C′|◦, |∠CBA|◦ = |∠C′B′A′|◦, |∠ACB|◦ = |∠A′C′B′|◦.
We denote this by T(A,B,C)
≡→(A′,B′,C′) T ′.
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50004-5

50 Congruence of triangles; parallel lines Ch. 4
We say that T is congruent to T ′, written T ≡ T ′, if T is congruent to T ′ in atleast one of the correspondences
(A,B,C)→ (A′,B′,C′), (A,B,C)→ (A′,C′,B′), (A,B,C)→ (B′,C′,A′),(A,B,C)→ (B′,A′,C′), (A,B,C)→ (C′,A′,B′), (A,B,C)→ (C′,B′,A′).
COMMENT. Originally, behind the concept of congruence lay the idea that T canbe placed on T ′, fitting it exactly.
AXIOM A6. If triangles T and T ′, with vertices {A,B,C} and {A′,B′,C′}, respec-tively, are such that
|C,A|= |C′,A′|, |A,B|= |A′,B′|, |∠BAC|◦ = |∠B′A′C′|◦,
then T(A,B,C)
≡→(A′,B′C′) T ′. |
COMMENT. This is known as the SAS (side, angle, side) principle of congruencefor triangles.
Triangles have the following properties:-
If in a triangle [A,B,C] :-
(i) |A,B|= |A,C| then |∠ABC|◦ = |∠ACB|◦;
(ii) |A,B|= |A,C| and D is the mid-point of B and C, then AD ⊥ BC;
(iii) B �= C, D is the mid-point of B and C, and A �= D is such that AD ⊥ BC, then|A,B|= |A,C|;
(iv) |BAC is not straight, E ∈ [A,B ,F ∈ [A,C are such that |A,E| = |A,F| > 0,and G = mp(E,F), then AG = ml(|BAC).
Proof .
(i) Note that for the triangle T with vertices {A,B,C}, under the correspondence(A,B,C)→ (A,C,B),
|A,B|= |A,C|, |A,C|= |A,B|, |∠BAC|◦ = |∠CAB|◦,
so by the SAS principle T(A,B,C)
≡→(A,C,B) T . In particular |∠ABC|◦ = |∠ACB|◦.

Sec. 4.1 Principles of congruence 51
(ii) Note that if T1,T2 arethe triangles with vertices{A,B,D},{A,C,D}, respec-tively, then
|A,B|= |A,C|, |B,D|= |C,D|,
|∠ABD|◦ = |∠ACD|◦, by (i),
so by the SAS principle,T1 (A,B,D)
≡→(A,C,D)T2. In par-
ticular |∠ADB|◦ = |∠ADC|◦.As D ∈ [B,C], the sum of thedegree-measures of these anglesis 180 and so they must beright-angles.
A
B D C
Figure 4.2. An isosceles triangle.
(iii) As AD ⊥ BC we know that A �∈ BC. If T1,T2 are the triangles with vertices{A,B,D},{A,C,D}, respectively, then
|B,D|= |C,D|, |A,D|= |A,D|, |∠BDA|◦ = |∠CDA|◦,
so by the SAS principle, T1 (A,B,D)≡→(A,C,D)
T2. In particular |A,B|= |A,C|.(iv) As in (ii), the triangles [A,E,G], [A,F,G] are congruent, and so
|∠EAG|◦ = |∠FAG|◦.Definition . A triangle is said to be isosceles if at least two of its sides have equal
lengths.
If T,T ′ are triangles with vertices {A,B,C},{A′,B′,C′}, respectively, for which
|B,C|= |B′,C′|, |∠CBA|◦ = |∠C′B′A′|◦, |∠BCA|◦ = |∠B′C′A′|◦,
then T(A,B,C)
≡→(A′,B′,C′) T ′.Proof . Suppose that |C′,A′| �= |C,A|. Choose the point D′ on the half-line [C′,A′
such that |C′,D′| = |C,A|. Then if T ′′ is the triangle with vertices {B′,C′,D′}, underthe correspondence (B,C,A)→ (B′,C′,D′) we have
|B,C|= |B′,C′|, |C,A|= |C′,D′|, |∠BCA|◦ = |∠B′C′D′|◦.
�
�
�
A
B
C
A′
B′
C′
D′
Figure 4.3.

52 Congruence of triangles; parallel lines Ch. 4
Then by the SAS principle, T(B,C,A)
≡→(B′,C′,D′) T ′′. In particular
|∠C′B′D′|◦ = |∠CBA|◦ = |∠C′B′A′|◦.Then we have different wedge-angles ∠C′B′A′, ∠C′B′D′, laid off on the same side ofB′C′ and having the same degree-measure. This gives a contradiction.
Thus |C′,A′|= |C,A|, and as we also have
|C′,B′|= |C,B|, |∠B′C′A′|◦ = |∠BCA|◦,by the SAS principle we have T
(B,C,A)≡→(B′,C′,A′) T ′.
This is known as the ASA (angle, side,angle) principle of congruence.
If T and T ′ are triangles with vertices {A,B,C},{A′,B′,C′}, respectively, forwhich
|B,C|= |B′,C′|, |C,A|= |C′,A′|, |A,B|= |A′,B′|,then T
(A,B,C)≡→(A′,B′,C′) T ′.
A
B
D
CE
Figure 4.4. The SSS principle of congruence.
A
B
D
CE
Proof . Choose D on the opposite sideof BC from A, so that |∠CBD|◦ =|∠C′B′A′|◦ and |B,D|= |B′,A′|. Let T ′′
be the triangle with vertices {B,C,D}.Then as |B,C| = |B′,C′|, by the SASprinciple
T ′′(B,D,C)
≡→(B′,A′,C′) T ′.
Now |B,A| = |B′,A′| = |B,D| sowe have an isosceles triangle and|∠BAD|◦ = |∠BDA|◦. Similarly|∠CAD|◦ = |∠CDA|◦.
A
B
D
C E
Note that A and D are on different sides of BC, so a point E of [A,D] is on BC.CASE 1. Let E ∈ [B,C]. Then [A,D ⊂ I R(|BAC) and [D,A ∈ I R(|BDC). It
follows that
|∠BAC|◦ = |∠BAD|◦+ |∠DAC|◦ = |∠BDA|◦+ |∠ADC|◦ = |∠BDC|◦.

Sec. 4.2 Alternate angles, parallel lines 53
CASE 2. Let B ∈ [E,C]. Then [A,B ⊂ I R(|DAC) and [D,B ∈ I R(|ADC). Itfollows that
|∠BAC|◦ = |∠DAC|◦ − |∠DAB|◦ = |∠ADC|◦ − |∠ADB|◦ = |∠BDC|◦.
CASE 3. Let C ∈ [B,E]. Then [A,C ⊂ I R(|BAD) and [D,C∈ I R(|BDA). It follows that
|∠BAC|◦ = |∠BAD|◦ − |∠DAC|◦ = |∠BDA|◦ − |∠ADC|◦ = |∠BDC|◦.
Now combining the cases, by the SAS principle, as
|A,B|= |D,B|, |A,C|= |D,C|, |∠BAC|◦ = |∠BDC|◦,
we have T(A,B,C)
≡→(D,B,C) T ′′. But T ′′(D,B,C)
≡→(A′,B′,C′) T ′ so
T(A,B,C)
≡→(A′,B′,C′) T ′.This is known as the SSS(side, side,side) principle of congruence for triangles.
4.2 ALTERNATE ANGLES, PARALLELLINES
4.2.1 Alternate angles
Let A,B,C be non-collinear points, and take D �=C so that C ∈ [A,D]. Then|∠BCD|◦ > |∠CBA|◦.
Proof . Let E = mp(B,C) and choose F so that E = mp(A,F). Then if T1,T2 arethe triangles with vertices {A,B,E}, {F,C,E}, respectively, by the SAS principle ofcongruence T1 (A,B,E)
≡→(F,C,E)T2. In particular,
|∠EBA|◦ = |∠ECF|◦, i.e. |∠CBA|◦ = |∠BCF|◦.
But [C,F ⊂ I R(|BCD) as E , and so F , is in the closed half-plane with edge AC inwhich B lies, and D and F are on the opposite side of BC from A. Also F �∈ AD asF ∈ AD would imply that E =C. Then by 3.5.2 |∠BCF|◦ < |∠BCD|◦.
COROLLARY 1 . In the theorem let G �=C be such that C ∈ [B,G]. Then |∠ACG|◦> |∠ABC|◦.
Proof . This follows immediately as ∠ACG and ∠BCD are vertically oppositeangles.

54 Congruence of triangles; parallel lines Ch. 4
COMMENT. If D andH are on opposite sidesof BC, then ∠CBH and∠BCD are known as al-ternate angles . This lastresult implies that if al-ternate angles ∠CBH and∠BCD are equal in mea-sure, then CD and BHcannot meet at some pointA.
�
�
�
� � � �
�
�
�
�
A
B
D
CE
GH
F
Figure 4.5. Result on alternate angles.
COROLLARY 2 . Given any line l and any point P �∈ l, there is a line m whichcontains P and is such that l∩m = /0.
Proof . Take any points A,B ∈ l and lay off an angle ∠APQ on the opposite sideof AP from B, so that |∠APQ|◦ = |∠PAB|◦. Then by the recent comment the linePQ does not meet l. In this ∠APQ and ∠PAB are alternate angles which are equal inmeasure.
4.2.2 Parallel lines
Definition . If l and m are lines in Λ, we say that l is parallel to m, written l ‖ m, ifl = m or l∩m = /0.
Parallelism has the following properties:-
(i) l ‖ l for all l ∈ Λ;
(ii) If l ‖ m then m ‖ l;
(iii) Given any line l ∈ Λ and any point P ∈ Π, there is at least one line m whichcontains P and is such that l ‖ m.
(iv) If the lines l and m are both perpendicular to the line n, then l and m areparallel to each other.
�
�
�
�
AB
Q
P
l
m
Figure 4.6. Parallel lines.
�
�
�
�
AB
Q P
l
mn

Sec. 4.3 Properties of triangles and half-planes 55
Proof .(i) and (ii) follow immediately from the definition, while (iii) follows from 4.2.1.(iv) As perpendicular lines form right-angles with each other at some point, l
must meet n at some point A, and m must meet n at some point P such that if Bis any other point of l and Q is any point of m on the other side of n from B, then|∠PAB|◦ = 90, |∠APQ|◦ = 90. Then, as these are alternate angles equal in measure,by 4.2.1 Corollary 1, l ‖ m.
4.3 PROPERTIES OF TRIANGLES ANDHALF-PLANES
4.3.1 Side-angle relationships; the triangle inequality
If A,B,C are non-collinear points and |A,B| > |B,C|, then |∠ACB|◦ > |∠BAC|◦, sothat in a triangle a greater angle is opposite a longer side.
A
C
B
D
Figure 4.7. Angle oppositelonger side.
A
B
CD
Figure 4.8. The triangle inequality.
Proof . Choose D ∈ [B,A so that |B,D|= |B,C|. Then D ∈ [B,A] as |B,D|< |B,A|.Now |∠ACB|◦ > |∠DCB|◦ as [C,D ⊂ I R(|BCA), and |∠DCB|◦ = |∠BDC|◦ by4.1.1. But |∠BDC|◦ > |∠DAC|◦ by 4.2.1 Corollary 1, so
|∠ACB|◦ > |∠DCB|◦ = |∠BDC|◦ > |∠DAC|◦.
Hence |∠ACB|◦ > |∠DAC|◦ and ∠DAC = ∠BAC as D ∈ [B,A].
COROLLARY . If A,B,C are non-collinear points and |∠ACB|◦> |∠BAC|◦, then|A,B|> |B,C|, so that in a triangle a longer side is opposite a greater angle.
Proof . For if |A,B| ≤ |B,C|, we have |∠ACB|◦ ≤ |∠BAC|◦ by 4.1.1(i) and thisresult.
The triangle inequality. If A,B,C are non-collinear points, then |C,A| <|A,B|+ |B,C|.
Proof . Take a point D so that B ∈ [A,D] and |B,D|= |B,C|.As [C,B ⊂ I R(|ACD) we have |∠DCA|◦ > |∠DCB|◦. But |∠DCB|◦ = |∠CDB|◦

56 Congruence of triangles; parallel lines Ch. 4
by 4.1.1, so by our last result, |A,D| > |A,C|. However |A,D| = |A,B|+ |B,D| asB ∈ [A,D], and the result follows.
�
P
l
m
G1
Figure 4.9.
� �
� �
� �
A B
C D
l E F
Figure 4.10.
4.3.2 Properties of parallelism
Let l ∈ Λ be a line, G1 an open half-plane with edge l and P a point of G1. If m is aline such that P ∈ m and l ‖ m, then m ⊂ G1.
Proof . As P �∈ l,P ∈ m we have l �= m. Then as l ‖ m we have l ∩m = /0. Thusthere cannot be a point of m on l. Neither can there be a point Q of m in G2, the otheropen half-plane with edge l. For then we would have [P,Q]∩ l �= /0 and so a point Rof m would be on l, as [P,Q]⊂ PQ = m.
Let AB,CD be distinct lines and l distinct from and parallel to both. If l meets[A,C] in a point E, then l meets [B,D] in a point F .
Proof . By the Pasch property applied to [A,B,C] as l does not meet [A,B] it meets[B,C] at some point G. Then by the Pasch property applied to [B,C,D], as l does notmeet [C,D] it meets [B,D] in some point F .
4.3.3 Dropping a perpendicular
� � ��
�
� �
� �
�
B AS
P
l
RQ
Figure 4.11. Dropping a perpendicular.
� � ��
�
�
S T U
P
l
Given any line l ∈ Λ and any point P �∈ l, there is a unique line m such that P ∈ mand l ⊥ m.

Sec. 4.3 Properties of triangles and half-planes 57
Proof .
Existence. Let A,B be distinct points of l. Take a point Q on the opposite side of lfrom P and such that |∠BAQ|◦ = |∠BAP|◦. Also take R ∈ [A,Q so that |A,R|= |A,P|.As P and R are on opposite sides of l, [P,R] meets l in a point S.
We first suppose that A �∈PR so that A �= S. Then [A,P,S] and [A,R,S] are congruentby the SAS-principle, so in particular |∠ASP|◦= |∠ASR|◦. As S∈ [P,R] it follows thatthese are right-angles and so PR ⊥ l.
In the second case suppose that A ∈ PR so that A = S. Then S ∈ [P,R] and byconstruction |∠BSR|◦ = |∠BSP|◦. Again these are right-angles so PR ⊥ l.
Uniqueness. Suppose that there are distinct points S,T ∈ l such that PS ⊥ l, PT ⊥l. Choose U �= T so that T ∈ [S,U ]. Then |∠UTP|◦ = |∠USP|◦ = 90 and this contra-dicts 4.2.1.
COMMENT. We refer to this last as dropping a perpendicular from the point Pto the line l.
Let A,B,C be non-collinear points such that AB ⊥ AC and let D be the foot of theperpendicular from A to BC. Then D ∈ [B,C], D �= B, D �=C.
Proof . By 4.2.1, in aright-angled triangle eachof the other two angleshave degree-measure lessthan 90. By 4.3.1 it thenfollows that the side op-posite the right-angle islonger than each of theother sides. It follows that|B,D| < |A,B| < |B,C|.By a similar argument|C,D|< |B,C|.
A
B D CFigure 4.12.
We cannot then have B ∈ [C,D] as that would imply |C,B| ≤ |C,D|, and sim-ilarly we cannot have C ∈ [B,D] with as that would imply |B,C| ≤ |B,D|. HenceD ∈ [B,C], D �= B, D �=C.
4.3.4 Projection and axial symmetry
Definition . For any line l ∈ Λ we define a function πl : Π → l by specifying thatfor all P ∈ Π, πl(P) is the foot of the perpendicular from P to l. We refer to πl asprojection to the line l.

58 Congruence of triangles; parallel lines Ch. 4
��
�
lπl(P)
P
Figure 4.13. Projection to the line l.
�
�
�
l
sl(P)
P
Axial symmetry in the line l.
Definition . For any line l ∈ Λ we define a function sl : Π → Π by specifying thatfor all P ∈ Π, sl(P) is the point Q such that
πl(P) = mp(P,Q).
We refer to sl as axial symmetry in the line l.
Let H1,H2 be closed half-planes with common edge l, let P1 ∈ H1 \ l and P2 =sl(P1). Then, for all P ∈ H1, |P,P1| ≤ |P,P2|.
Proof . If P ∈ l, then |P,P1|= |P,P2|, by 4.1.1 when P �∈ P1P2, and asP = mp(P1,P2) otherwise.
When P ∈ G1 = H1 \ l we suppose first that P �∈ P1P2. Then [P,P2] meets l in apoint Q and we have
|P,P2|= |P,Q|+ |Q,P2|= |P,Q|+ |Q,P1|.
Now we cannot have Q ∈ [P,P1]as [P,P1] ⊂ G1 and Q ∈ l. Thuseither Q �∈ PP1 or Q ∈ PP1 \[P,P1]. We then have |P,Q| +|Q,P1| > |P,P1| by 4.3.1 and3.1.2. For the case when P ∈P1P2, we denote by R the pointof intersection of P1P2 and l, sothat R = mp(P1,P2).
� �
�
�
�
R Q
P
P1
P2
l
H1
H2
Figure 4.14. Distance and half-planes.
Now P ∈ [R,P1 so either P ∈ [R,P1] or P1 ∈ [R,P]. In the first of these cases wehave
|P1,P|< |P1,R|= |R,P2|< |P,P2|,as R ∈ [P,P2]. In the second case we have |P,P1|< |P,R|< |P,P2| as R ∈ [P,P2].
Exercises
4.1 If D �= A is in [A,B,C] but not in [B,C], then |B,D|+ |D,C| < |B,A|+ |A,C|and |∠BDC|◦ > |∠BAC|◦.

Sec. 4.3 Properties of triangles and half-planes 59
4.2 There is an AAS-principle of congruence that if
|∠BAC|◦ = |∠EDF|◦, |∠CBA|◦ = |∠FED|◦,|B,C|= |E,F|,
then the triangles [A,B,C], [D,E,F] are congruent. [Hint. Suppose that|∠BCA|◦ < |∠EFD|◦; lay off an angle ∠BCG equal in magnitude to ∠EFDand with G on the same side of BC as A is; then [C,G meets [A,B] at a point H;also [H,B,C] ≡ [D,E,F] and in particular |∠BHC|◦ = |∠EDF|◦ = |∠BAC|◦;deduce a contradiction and then apply the ASA-principle.]
4.3 There is an ASS-principle of congruence for right-angled triangles, that if BC ⊥BA, EF ⊥ ED, |C,A|= |F,D|, |A,B|= |D,E|, then [A,B,C]≡ [D,E,F]. [Hint.Take C′ so that E ∈ [F,C′] and |E,C′|= |B,C|.]
4.4 If P∈ml(|BAC) and Q= πAB(P), R= πAC(P), then |P,Q|= |P,R|. Conversely,if P ∈ I R(|BAC) and |P,Q| = |P,R| where Q = πAB(P), R = πAC(P), thenP ∈ ml(|BAC).
4.5 In triangles [A,B,C], [D,E,F ] let
|A,B|= |D,E|, |A,C|= |D,F|, |∠BAC|◦ > |∠EDF|◦.
Then |B,C|> |E,F|. [Hint. Lay off the angle ∠BAG with |∠BAG|◦ = |∠EDF|◦and with G on the same side of AB as C is. If G ∈ BC proceed; if G �∈ BC, letK = mp(G,C) and show that [A,K meets [B,C] in a point H .]
4.6 If AB ‖ AC, then AB = AC.
4.7 Let H1 be a closed half-plane with edge l, let P ∈ H1 and let O = πl(P). Thenif m is any line in Λ such that O ∈ m, we must have πm(P) ∈ H1.
4.8 With the notation of 4.1.1 show that in all cases T(A,B,C)
≡→(A,B,C) T and if
T(A,B,C)
≡→(A′,B′,C′) T ′ then T ′(A′,B′,C′) ≡→(A,B,C) T . Show also that if
T(A,B,C)
≡→(A′,B′,C′) T ′ and T ′(A′,B′,C′) ≡→(A′′,B′′,C′′) T ′′, then T
(A,B,C)≡→(A′′,B′′,C′′) T ′′.
Thus congruence of triangles is reflexive, symmetric and transitive, and thus isan equivalence relation.

This page intentionally left blank

5
The parallel axiom; Euclideangeometry
COMMENT. The effect of introducing any axiom is to narrow things down, and de-pending on the final axiom still to be taken, we can obtain two quite distinct well-known types of geometry. By introducing our final axiom, we confine ourselves tothe familiar school geometry, which is known as Euclidean geometry.
5.1 THE PARALLEL AXIOM
5.1.1 Uniqueness of a parallel line
We saw in 4.2 that given any line l and any point P �∈ l there is at least one line msuch that P ∈ m and l ‖ m. We now assume that there is only one such line ever.
AXIOM A7. Given any line l ∈ Λ and any point P �∈ l, there is at most one line msuch that P ∈ m and l ‖ m. |
COMMENT. By 4.2 and A7, given any line l ∈ Λ and any point P ∈ Π, there is aunique line m through P which is parallel to l.
Let l ∈ Λ, P ∈ Π and n ∈ Λ be such that l �= n, P ∈ n and l ‖ n. Let A and B beany distinct points of l and R a point of n such that R and B are on opposite sides ofAP. Then |∠APR|◦ = |∠PAB|◦, so that for parallel lines alternate angles must haveequal degree-measures.
Proof . Let m be the line PQ in 4.2.1 such that |∠APQ|◦ = |∠BAP|◦. Then l ‖ m.As m and n both contain P and l is parallel to both of them, by A7 we have m = n, sothat R ∈ [P,Q and so |∠APR|◦ = |∠APQ|◦. Thus |∠APR|◦ = |∠APQ|◦ = |∠PAB|◦.
Let l,n be distinct parallel lines, A, B ∈ l and P, T ∈ n be such that B and T are onthe one side of AP, and S �= P be such that P ∈ [A,S]. Then the angles ∠BAP, ∠T PShave equal degree-measures.
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50005-7

62 The parallel axiom; Euclidean geometry Ch. 5
Proof . Choose R �= P so that P ∈ [T,R]. Then R ∈ n and B and R are on oppositesides of AP, so that ∠BAP, ∠APR are alternate angles and so have equal degree-measures. But ∠APR and ∠T PS are vertically opposite angles and so have equaldegree-measures. Hence |∠BAP|◦ = |∠TPS|◦.
�
��
�
�
AB
PR
Q
n
l
◦
◦
Figure 5.1. Alternate angles.
�
��
�
�
�
�
�
AB
PR
Q
S
T
l
n
◦
◦
Corresponding angles.
We call such angles ∠BAP, ∠T PS corresponding angles for a transversal.
If lines l,m,n are such that l ‖ m and m ‖ n, then l ‖ n.Proof . If l = n, the result is trivial as l ‖ l, so suppose l �= n. If l is not parallel to
n, then l and n will meet at some point P, and then we will have distinct lines l andn, both containing P and both parallel to m, which gives a contradiction by A7. Thusparallelism is a transitive relation. Combined with the properties in 4.2.2 this makesit an equivalence relation.
If lines are such that l ⊥ n and l ‖ m, then m ⊥ n.Proof . As l is perpendicular ton they must meet at some pointA. As l ‖ m, we cannot have m ‖n, as by transitivity that wouldimply l ‖ n. Thus m meets n insome point P, and if we chooseB on l, Q on m on opposite sidesof n, then we have |∠APQ|◦ =|∠PAB|◦ as these are alternateangles for parallel lines. Hence|∠APQ|◦ = 90 and m ⊥ n.
�
�
�
�
A◦B
P◦ Q
l
m
n
Figure 5.2.
5.2 PARALLELOGRAMS
5.2.1 Parallelograms and rectangles
Definition . Let points A,B,C,D be such that no three of them are collinear and AB ‖CD, AD ‖ BC. Let H1 be the closed half-plane with edge AB in which C lies; asCD ‖ AB then, by 4.3.2, D ∈H1. Similarly let H3 be the closed half-plane with edgeBC in which A lies; as AD ‖ BC, then D ∈ H3. Thus D ∈ H1 ∩H3 = I R(|ABC)and so by the cross-bar theorem [A,C] meets [B,D in some point T , which is unique
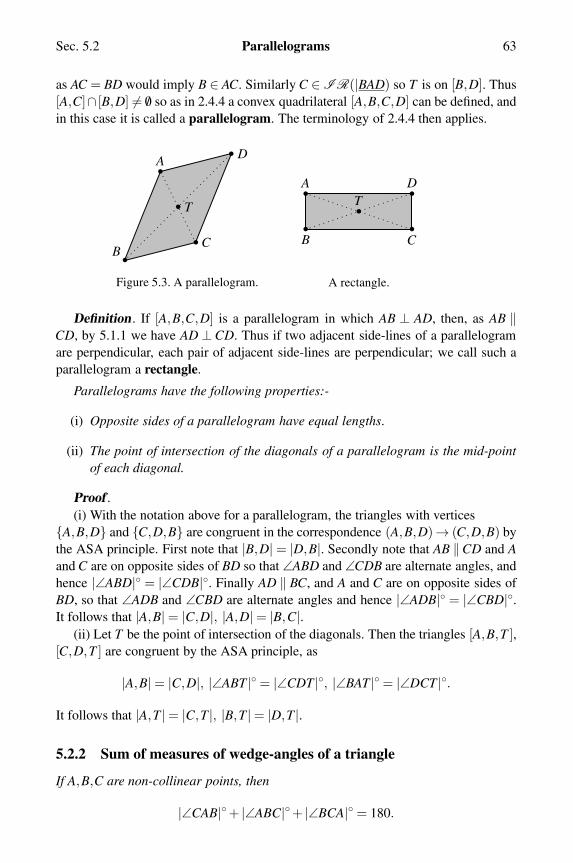
Sec. 5.2 Parallelograms 63
as AC = BD would imply B ∈ AC. Similarly C ∈ I R(|BAD) so T is on [B,D]. Thus[A,C]∩ [B,D] �= /0 so as in 2.4.4 a convex quadrilateral [A,B,C,D] can be defined, andin this case it is called a parallelogram. The terminology of 2.4.4 then applies.
�
�
�
�
A
BC
D
T�
Figure 5.3. A parallelogram.
� �
��
A
B C
DT�
A rectangle.
Definition . If [A,B,C,D] is a parallelogram in which AB ⊥ AD, then, as AB ‖CD, by 5.1.1 we have AD ⊥ CD. Thus if two adjacent side-lines of a parallelogramare perpendicular, each pair of adjacent side-lines are perpendicular; we call such aparallelogram a rectangle.
Parallelograms have the following properties:-
(i) Opposite sides of a parallelogram have equal lengths.
(ii) The point of intersection of the diagonals of a parallelogram is the mid-pointof each diagonal.
Proof .(i) With the notation above for a parallelogram, the triangles with vertices
{A,B,D} and {C,D,B} are congruent in the correspondence (A,B,D)→ (C,D,B) bythe ASA principle. First note that |B,D|= |D,B|. Secondly note that AB ‖CD and Aand C are on opposite sides of BD so that ∠ABD and ∠CDB are alternate angles, andhence |∠ABD|◦ = |∠CDB|◦. Finally AD ‖ BC, and A and C are on opposite sides ofBD, so that ∠ADB and ∠CBD are alternate angles and hence |∠ADB|◦ = |∠CBD|◦.It follows that |A,B|= |C,D|, |A,D|= |B,C|.
(ii) Let T be the point of intersection of the diagonals. Then the triangles [A,B,T ],[C,D,T ] are congruent by the ASA principle, as
|A,B|= |C,D|, |∠ABT|◦ = |∠CDT|◦, |∠BAT|◦ = |∠DCT|◦.
It follows that |A,T|= |C,T|, |B,T|= |D,T|.
5.2.2 Sum of measures of wedge-angles of a triangle
If A,B,C are non-collinear points, then
|∠CAB|◦+ |∠ABC|◦+ |∠BCA|◦ = 180.

64 The parallel axiom; Euclidean geometry Ch. 5
Thus the sum of the degree-measures of the wedge-angles of a triangle is equal to180.Proof . Let l be the line throughA which is parallel to BC. If mis the line through B which isparallel to AC, then we cannothave l ‖m as we would then havel ‖ m, m ‖ AC which would im-ply l ‖ AC; we would then haveBC ‖ l, l ‖ AC and so BC ‖ AC;thus as BC ∩AC �= /0 we wouldhave BC = AC; this would makeA,B,C collinear and contradictour assumption.
� �
�� �
A
B C
Q Rl
m
x
x
y
y
Figure 5.4. Angles of a triangle.
Thus m meets l at some point, Q say. Then [A,C,B,Q] is a parallelogram and[A,B], [Q,C] meet at a point T . Now Q is on the opposite side of AB from C, sothat ∠CBA and ∠BAQ are alternate angles and so |∠CBA|◦ = |∠BAQ|◦. Moreover[A,B ⊂ I R(|CAQ) and so |∠CAB|◦+ |∠BAQ|◦ = |∠CAQ|◦.
Choose R �= A so that A ∈ [Q,R]. Then R ∈ l and R is on the opposite side ofAC from Q. But BQ ‖ AC so B and Q are on the same side of AC, and hence Band R are on opposite sides of AC. Then ∠BCA and ∠CAR are alternate angles, so|∠BCA|◦ = |∠CAR|◦. Thus
(|∠CAB|◦+ |∠CBA|◦)+ |∠BCA|◦ = (|∠CAB|◦+ |∠BAQ|◦)+ |∠BCA|◦= |∠CAQ|◦+ |∠CAR|◦= 180.
COROLLARY. If the points A,B,C are non-collinear, and D �= C is chosen sothat C ∈ [B,D], then |∠ACD|◦ = |∠BAC|◦+ |∠CBA|◦. Thus the degree-measure of anexterior wedge-angle of a triangle is equal to the sum of the degree-measures of thetwo remote wedge-angles of the triangle.
Proof . For each of these is equal to 180−|∠ACB|◦, as C ∈ [B,D].
5.3 RATIO RESULTS FOR TRIANGLES
5.3.1 Lines parallel to one side-line of a triangle
Let A,B,C be non-collinear points, and with l = AB, m = AC, let ≤l, ≤m be naturalorders such that A ≤l B, A ≤m C. Let D1,D2,D3 be points of AB such that A ≤l D1 ≤l
D2 ≤l D3 ≤l B and |D1,D2|= |D2,D3|, so that D2 is the mid-point of D1 and D3. Thenthe lines through D1,D2 and D3 which are all parallel to BC, will meet AC in pointsE1,E2,E3, respectively, such that A ≤m E1 ≤m E2 ≤m E3 ≤m C and |E1,E2|= |E2,E3|.
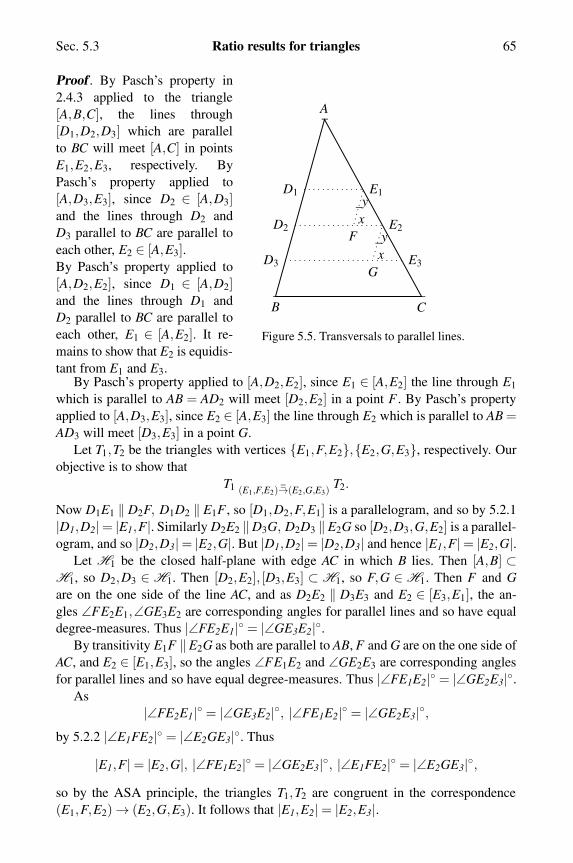
Sec. 5.3 Ratio results for triangles 65
Proof . By Pasch’s property in2.4.3 applied to the triangle[A,B,C], the lines through[D1,D2,D3] which are parallelto BC will meet [A,C] in pointsE1,E2,E3, respectively. ByPasch’s property applied to[A,D3,E3], since D2 ∈ [A,D3]and the lines through D2 andD3 parallel to BC are parallel toeach other, E2 ∈ [A,E3].By Pasch’s property applied to[A,D2,E2], since D1 ∈ [A,D2]and the lines through D1 andD2 parallel to BC are parallel toeach other, E1 ∈ [A,E2]. It re-mains to show that E2 is equidis-tant from E1 and E3.
|
|
|
A
B C
D1
D2
D3
E1
E2
E3
F
G
|
|
x
x
y
y
Figure 5.5. Transversals to parallel lines.
By Pasch’s property applied to [A,D2,E2], since E1 ∈ [A,E2] the line through E1
which is parallel to AB = AD2 will meet [D2,E2] in a point F . By Pasch’s propertyapplied to [A,D3,E3], since E2 ∈ [A,E3] the line through E2 which is parallel to AB =AD3 will meet [D3,E3] in a point G.
Let T1,T2 be the triangles with vertices {E1,F,E2},{E2,G,E3}, respectively. Ourobjective is to show that
T1 (E1,F,E2)≡→(E2,G,E3)
T2.
Now D1E1 ‖ D2F, D1D2 ‖ E1F , so [D1,D2,F,E1] is a parallelogram, and so by 5.2.1|D1,D2|= |E1,F|. Similarly D2E2 ‖ D3G, D2D3 ‖E2G so [D2,D3,G,E2] is a parallel-ogram, and so |D2,D3|= |E2,G|. But |D1,D2|= |D2,D3| and hence |E1,F|= |E2,G|.
Let H1 be the closed half-plane with edge AC in which B lies. Then [A,B] ⊂H1, so D2,D3 ∈ H1. Then [D2,E2], [D3,E3] ⊂ H1, so F,G ∈ H1. Then F and Gare on the one side of the line AC, and as D2E2 ‖ D3E3 and E2 ∈ [E3,E1], the an-gles ∠FE2E1,∠GE3E2 are corresponding angles for parallel lines and so have equaldegree-measures. Thus |∠FE2E1|◦ = |∠GE3E2|◦.
By transitivity E1F ‖E2G as both are parallel to AB, F and G are on the one side ofAC, and E2 ∈ [E1,E3], so the angles ∠FE1E2 and ∠GE2E3 are corresponding anglesfor parallel lines and so have equal degree-measures. Thus |∠FE1E2|◦ = |∠GE2E3|◦.
As|∠FE2E1|◦ = |∠GE3E2|◦, |∠FE1E2|◦ = |∠GE2E3|◦,
by 5.2.2 |∠E1FE2|◦ = |∠E2GE3|◦. Thus
|E1,F|= |E2,G|, |∠FE1E2|◦ = |∠GE2E3|◦, |∠E1FE2|◦ = |∠E2GE3|◦,so by the ASA principle, the triangles T1,T2 are congruent in the correspondence(E1,F,E2)→ (E2,G,E3). It follows that |E1,E2|= |E2,E3|.

66 The parallel axiom; Euclidean geometry Ch. 5
Let A,B,C be non-collinear points and let P ∈ [A,B and Q ∈ [A,C be such thatPQ ‖ BC. Then
|A,P||A,B| =
|A,Q||A,C| .
�
�
�
� �
� �
� �
� �
� �
� �
� �
� �
� �
A
B C
P Q
B1
B2
B4
B5
B6
B7
B8
B9
C1
C2
C4
C5
C6
C7
C8
C9
Figure 5.6.
�
�
�
� �
� �
� �
A
B C
P QPu
Pv
Qu
Qv
Proof . We assume first that P ∈ [A,B]. Within this first case, we suppose initiallythat |A,P|
|A,B| =st,
where s and t are positive whole numbers with s< t, so that s/t is an arbitrary rationalnumber between 0 and 1. For 0 ≤ j ≤ t let B j be the point on [A,B such that
|A,Bj||A,B| =
jt,
so that B0 = A, Bt = B and Bs = P. If AB = l and ≤l is the natural order for whichA ≤l B, then A ≤l B j−1 ≤l B j ≤l B j+1 ≤l B and |Bj−1,Bj| = |Bj,Bj+1|. If AC = mand ≤m is the natural order for which A ≤m C, then by the last result applied with(D1,D2,D3) = (B j−1,B j,B j+1), for 1≤ j ≤ t−1 the line through B j which is parallelto BC will meet AC in a point Cj such that A ≤m Cj−1 ≤m Cj ≤m Cj+1 ≤m C and|Cj−1,Cj|= |Cj,Cj+1|.
It follows that, for 0 ≤ j ≤ t, |A,Cj|= j|A,C1| and so as Ct =C,
|A,Cj||A,C| =
j|A,C1|t|A,C1| =
jt.
In particular, as Cs = Q, it follows that
|A,Q||A,C| =
st=
|A,P||A,B| .

Sec. 5.3 Ratio results for triangles 67
Still within the first case, now suppose that
|A,P||A,B| = x,
|A,Q||A,C| = y,
where x is an irrational number with 0 < x < 1. If u is any positive rational numberless than x, and Pu is a point chosen on [A,B] so that
|A,Pu||A,B| = u,
then the line through Pu which is parallel to BC will meet [A,C] in a point Qu suchthat |A,Qu|
|A,C| = u.
Similarly if v is any rational number such that x < v < 1, and Pv is a point chosen on[A,B] so that
|A,Pv||A,B| = v,
then the line through Pv which is parallel to BC will meet [A,C] in a point Qv suchthat |A,Qv|
|A,C| = v.
As |A,Pu|< |A,P|< |A,Pv| we have P ∈ [Pu,Pv]. It follows by 4.3.2 that Q ∈ [Qu,Qv]and so u < y < v. Thus for all rational u and v such that u < x < v we have u < y < v.It follows that x = y.
This completes the first case. For the second case note that if P �∈ [A,B] we haveB ∈ [A,P]. Then by the first case
|A,B||A,P| =
|A,C||A,Q| ,
so the reciprocals of these are equal.
5.3.2 Similar triangles
Let A,B,C and A′,B′,C′ be two sets of non-collinear points such that
|∠BAC|◦ = |∠B′A′C′|◦, |∠CBA|◦ = |∠C′B′A′|◦, |∠ACB|◦ = |∠A′C′B′|◦.
Then|B′,C′||B,C| =
|C′,A′||C,A| =
|A′,B′||A,B| .
Thus if the degree-measures of the angles of one triangle are equal, respectively, tothe degree-measures of the angles of a second triangle, then the ratios of the lengthsof corresponding sides of the two triangles are equal.

68 The parallel axiom; Euclidean geometry Ch. 5
�
�
�A′
B′
C′
�
�
�
�
�
A
B
C
B′′C′′
Figure 5.7. Similar triangles.
textProof. Choose B′′ ∈ [A,B and C′′ ∈ [A,C so that |A,B′′|= |A′,B′|,|A,C′′|= |A′,C′|. Then as |∠B′′AC′′|◦ = |∠BAC|◦ = |∠B′A′C′|◦, by the SAS principlewe see that the triangles [A,B′′,C′′], [A′,B′,C′] are congruent in the correspondence(A,B′′,C′′)→ (A′,B′,C′). In particular |∠AB′′C′′|◦ = |∠A′B′C′|◦ and so |∠AB′′C′′|◦ =|∠ABC|◦. These are corresponding angles in the sense of 5.1.1, so B′′C′′ ‖BC and thenby 5.3.1
|A,B′′||A,B| =
|A,C′′||A,C| ,
so|A′,B′||A,B| =
|A′,C′||A,C| .
By a similar argument on taking a triangle [B,E,F] which is congruent to [B′,C′,A′],we have
|B′,C′||B,C| =
|B′,A′||B,A| .
COMMENT. Triangles like these, which have the degree-measures of correspond-ing angles equal and so the ratios of the lengths of corresponding sides are equal, aresaid to be similar in the correspondence (A,B,C)→ (A′,B′,C′).
Let A,B,C and A′,B′,C′ be two sets of non-collinear points such that
|A′,B′||A,B| =
|A′,C′||A,C| , |∠B′A′C′|◦ = |∠BAC|◦.
Then the triangles are similar.Proof . Choose B′′ ∈ [A,B , C′′ ∈ [A,C so that |A,B′′|= |A′,B′|,
|A,C′′|= |A′,C′|. Then as |∠B′A′C′|◦ = |∠BAC|◦ = |∠B′′AC′′|◦, by the SAS principlewe see that the triangles [A′,B′,C′], [A,B′′,C′′] are congruent. We note that
|A,B′′||A,B| =
|A,C′′||A,C| .

Sec. 5.4 Pythagoras’ theorem, c. 550B.C. 69
Now the line through B′′ which is parallel to BC will meet [A,C in a point D suchthat
|A,B′′||A,B| =
|A,D||A,C| .
Hence|A,C′′||A,C| =
|A,D||A,C| ,
from which it follows that |A,D|= |A,C′′|. As C′′,D ∈ [A,C we then have D=C′′ andso B′′C′′ ‖ BC. Thus the degree-measures of the angles of [A,B,C] are equal to thoseof the corresponding angles of [A,B′′,C′′] and so in turn to those of the correspondingangles in [A′,B′,C′].
5.4 PYTHAGORAS’ THEOREM, c. 550B.C.
5.4.1
Pythagoras’ theorem. Let A,B,C be non-collinear points such that AB⊥AC. Then
|B,C|2 = |C,A|2 + |A,B|2.
Proof . Let D be the foot of the perpendicular from A to BC; then by 4.3.3 D is be-tween B and C. The triangles [D,B,A], [A,B,C] are similar as |∠ADB|◦ = |∠CAB|◦ =90, |∠DBA|◦ = |∠ABC|◦, and then by 5.2.2 |∠BAD|◦ = |∠BCA|◦. Then by the lastresult |A,B|
|B,C| =|B,D||A,B| ,
so that |A,B|2 = |B,D||B,C|. By a similar argument applied to the triangles [D,C,A],[A,B,C] we get that |A,C|2 = |D,C||B,C|. Then by addition, as D ∈ [B,C],
|A,B|2 + |A,C|2 = (|B,D|+ |D,C|)|B,C|= |B,C|2.
�
�
�
�
�
�� �
A
B D C
Figure 5.8. Pythagoras’ theorem.
� �
�
�
�
�
AB
C E
Figure 5.9. Impossible figurefor converse.

70 The parallel axiom; Euclidean geometry Ch. 5
CONVERSE of Pythagoras’ theorem. Let A,B,C be non-collinear points suchthat
|B,C|2 = |C,A|2 + |A,B|2.Then ∠BAC is a right-angle.
Proof . Choose the point E so that |A,C|= |A,E|, E is on the same side of AB asC is, and ∠BAE is a right-angle. By Pythagoras’ theorem,
|B,E|2 = |A,E|2 + |A,B|2 = |C,A|2 + |A,B|2 = |B,C|2.
Thus |B,E|= |B,C|, and the lengths of the sides of the triangle [B,A,C] are equal tothose of [B,A,E]. By the SSS principle, [B,A,C]≡ [B,A,E]. In particular |∠BAC|◦ =|∠BAE|◦ and this latter is a right-angle by construction. In fact E =C.
NOTE. In a right-angled triangle, the side opposite the right-angle is known as thehypotenuse.
5.5 MID-LINES AND TRIANGLES
5.5.1 Harmonic ranges
Let A,B,C be non-collinear points such that |A,B|> |A,C|. Take D �= A so that A ∈[B,D]. Then the mid-lines of |BAC and |CAD meet BC at points E,F, respectively,such that {E,F} divide [B,C] internally and externally in the same ratio.
���� �
�
�
�
�
�
�
�
�
�
A
B C
H
E F
G
D
K
Figure 5.10.
Proof . By the cross-bar theorem the mid-line of |BAC meets [B,C] in a point E .Let G be a point of the mid-line of |CAD, on the same side of AB as C is. We cannothave AG ‖ BC as that would imply
|∠BCA|◦ = |∠CAG|◦ = |∠GAD|◦ = |∠CBA|◦,
and this in turn would imply that |A,B| = |A,C|, contrary to hypothesis. Then AGmeets BC in some point F .
Take H ∈ [A,D so that |A,H|= |A,C|. Then |∠AHC|◦ = |∠ACH|◦. We have that
|∠BAC|◦ = |∠AHC|◦+ |∠ACH|◦, |∠AHC|◦ = |∠ACH|◦,|∠BAC|◦ = |∠BAE|◦+ |∠EAC|◦, |∠BAE|◦ = |∠EAC|◦.

Sec. 5.5 Mid-lines and triangles 71
It follows that |∠EAC|◦ = |∠ACH|◦, and as E,H are on opposite sides of AC thisimplies that AE ‖ HC. It then follows that
|B,E||E,C| =
|B,A||A,H| =
|B,A||A,C| .
Next choose K ∈ [A,B so that |A,K| = |A,C|. Then |A,K|< |A,B| so K ∈ [A,B].Now
|∠HAC|◦ = |∠AKC|◦+ |∠ACK|◦, |∠AKC|◦ = |∠ACK|◦,|∠HAC|◦ = |∠HAG|◦+ |∠GAC|◦, |∠HAG|◦ = |∠GAC|◦.
It follows that |∠GAC|◦ = |∠ACK|◦. But H,K are on opposite sides of AC, H,G areon the same side, and so G,K are on opposite sides. This implies that AG ‖ KC. NowAG meets BC at F , and K ∈ [A,B] so C ∈ [B,F ]. It follows that
|B,F||F,C| =
|B,A||A,K| =
|B,A||A,C| .
On combining the two results, we then have
|B,E||E,C| =
|B,F||F,C| .
NOTE. We also refer to the mid-line of |CAD above as the external bisector of|BAC. When {E,F} divide [B,C] internally and externally in the same ratio, we saythat (B,C,E,F) form a harmonic range.
Let (A,B,C,D) be a harmonic range and S �∈ AB. Let the line through C, parallelto SD, meet SA at G and SB at H. Then C is the mid-point of G and H .
���� �
�
�
��
�
�
�
�
�
A
B
C
D
S
G
H Figure 5.11.
Proof . We are given|A,C||C,B| =
|A,D||D,B| ,
so |A,C||A,D| =
|C,B||D,B| .

72 The parallel axiom; Euclidean geometry Ch. 5
As GC ‖ SD the triangles [A,D,S] and [A,C,G] are similar, so
|A,C||A,D| =
|G,C||S,D| .
In the similar triangles [B,C,H] and [B,D,S],
|B,C||B,D| =
|C,H||S,D| .
Then|G,C||S,D| =
|C,H||S,D| .
It follows that |G,C|= |C,H|.
���� �
�
�
�
�
�
�
�
�
�
�
�
S
A
B
C D
G
H
K
Figure 5.12.
Let (A,B,C,D) be a harmonic range, S �∈ AB and K �= S be such that S ∈ [A,K].Suppose that CS ⊥ DS. Then CS and DS are the mid-lines of |ASB and |BSK.
Proof . Let the line through C, parallel to DS meet SA at G and SB at H . Then Cis the mid-point of G and H . Also CS ⊥ SD, SD ‖ GH so SC ⊥ GH . It follows thatthe triangles [G,C,S] and [H,C,S] are congruent by the SAS-principle. In particular|∠GSC|◦ = |∠HSC|◦ and so SC is the mid-line of |ASB. But also |∠CGS|◦ = |∠CHS|◦and in fact the triangle [S,G,H] is isosceles. Now ∠CGS and ∠DSK are correspond-ing angles and ∠CHS and ∠DSH are alternate angles. It follows that |∠DSK|◦ =|∠DSH|◦ and so the mid-line of |BSK is SD.
5.6 AREA OF TRIANGLES, AND CONVEXQUADRILATERALS AND POLYGONS
5.6.1 Area of a triangle
Let A,B,C be non-collinear points, and D ∈ BC, E ∈ CA, F ∈ AB points such thatAD ⊥ BC, BE ⊥CA, CF ⊥ AB. Then
|A,D||B,C|= |B,E||C,A|= |C,F||A,B|.

Sec. 5.6 Area of triangles, and convex quadrilaterals and polygons 73
� �
�
�
�
�
�
A
B C
EF
� �
�
�
�
�
�
�
�
A
B C
EF
DFigure 5.13.
Proof .The triangles [A,B,E] and [A,C,F ] are similar in the correspondence (A,B,E)→
(A,C,F), as ∠BAE =∠CAF is in both, |∠AEB|◦ = |∠AFC|◦ = 90, and then by 5.2.2|∠ABE|◦ = |∠ACF|◦. By 5.3.2
|B,E||C,F| =
|A,B||C,A| .
On cross multiplication,
|B,E||C,A|= |C,F||A,B|.
By a similar argument, we can show that |A,D||B,C| is equal to these.Definition . With the notation of the last result, the area of the triangle [A,B,C],
denoted by Δ[A,B,C], is the common value of:
12 |A,D||B,C|, 1
2 |B,E||C,A|, 12 |C,F||A,B|.
Area of triangles has the following properties:-
(i) If P ∈ [B,C] is distinct from B and C, then
Δ[A,B,P]+Δ[A,P,C] = Δ[A,B,C].
(ii) If [A,B,C,D] is a convex quadrilateral, then
Δ[A,B,D]+Δ[C,B,D] = Δ[B,C,A]+Δ[D,C,A].
(iii) If two triangles are congruent then their areas are equal.

74 The parallel axiom; Euclidean geometry Ch. 5
� �
�
�
�
�
�
A
B CP D� �
�
��
�
�
A
B C
T
D
Figure 5.14.Proof .(i) For D is the foot of the perpendicular from the vertex A to the opposite side-line
in each of the triangles [A,B,P] and [A,P,C], so with p1 = |A,D| we have
Δ[A,B,P] = 12 p1|B,P|, Δ[A,P,C] = 1
2 p1|P,C|,
and the sum of these is
12 p1(|B,P|+ |P,C|) = 1
2 p1|B,C|,
as P ∈ [B,C].(ii) As in 5.2.1 denote by T the point which [A,C] and [B,D] have in common.
Then by (i) above,
Δ[A,B,D]+Δ[C,B,D]
=(Δ[A,B,T ]+Δ[A,D,T ])+ (Δ[C,B,T ]+Δ[C,D,T ]) ,
Δ[A,B,C]+Δ[A,D,C]
=(Δ[A,B,T ]+Δ[C,B,T ])+ (Δ[A,D,T ]+Δ[C,D,T ]) ,
and these are clearly equal.(iii)Let T be a triangle with vertices {A,B,C} and T ′ a triangle with vertices
{A′,B′,C′} such that T(A,B,C)
≡→(A′,B′,C′) T ′. Suppose that D and D′ are the feet of the
perpendiculars from A and A′ onto BC and B′C′, respectively.There are three cases to be considered.
�
�
�
A
B = D C� � �
�
A
B CD
Figure 5.15.
� �
��
�
A
B C D

Sec. 5.6 Area of triangles, and convex quadrilaterals and polygons 75
First suppose that D = B. Then |∠ABC|◦ = 90 = |∠A′B′C′|◦ and so D′ = B′. Then
12 |A,D||B,C|= 1
2 |A,B||B,C|= 12 |A′,B′||B′,C′|= 1
2 |A′,D′||B′,C′|,so the areas are equal. There is a similar proof when D =C.
Secondly suppose that D lies in [B,C] but is not B or C. Then the angles ∠CBA =∠DBA and ∠BCA = ∠DCA are both acute. It follows that the angles ∠C′B′A′ and∠B′C′A′ are both acute and so D′ lies in [B′,C′] but is not B′ or C′.
Now the triangles with vertices {A,B,D} and {A′,B′,D′} have two angles pair-wise equal in magnitude and so the third angles ∠DAB and ∠D′A′B′ are also equal.Then by the ASA principle of congruence these two triangles are congruent in thecorrespondence (A,B,D)→ (A′,B′,D′). In particular |A,D|= |A′,D′| and so12 |A,D||B,C|= 1
2 |A′,D′||B′,C′|. Thus the areas are equal.Thirdly suppose that C lies in [B,D] but is not D. Then the angles ∠CBA =∠DBA
and ∠DCA are acute and the angle ∠BCA is obtuse. It follows that ∠C′B′A′ is acuteand ∠B′C′A′ is obtuse and so C′ lies in [B′,D′] but is not D′. Now the triangles withvertices {A,B,D} and {A′,B′,D′} are congruent as in the second case and so theequality of areas follows. There is a similar proof when B lies in [D,C] but is not D,on interchanging the roles of B and C in this last argument.
5.6.2 Area of a convex quadrilateral
NOTE. In the quadrilateral in Figure 5.14 we have
Δ[A,B,D]+Δ[C,B,D] = {Δ[A,B,T ]+Δ[A,T,D]}+{Δ[C,B,T ]+Δ[C,T,D]}= {Δ[A,B,T ]+Δ[C,B,T ]}+{Δ[A,T,D]+Δ[C,T,D]}= Δ[B,A,C]+Δ[D,A,C].
Definition. We define the area of the convex quadrilateral [A,B,C,D] as inFigure 5.14 to be
Δ[A,B,D]+Δ[C,B,D] = Δ[B,A,C]+Δ[D,A,C],
and denote it by Δ[A,B,C,D].
If [A,B,C,D] is a rectangle, then
Δ[A,B,C,D] = |A,B||B,C|,that is the area is equal to the product of the lengths of two adjacent sides.
Proof . For Δ[A,B,D] = 12 |A,B||A,D|, Δ[C,B,D] = 1
2 |D,C||B,C|. As by 5.2.1|D,C|= |A,B| and |B,C|= |A,D|, the result follows by addition.
5.6.3 Area of a convex polygon
As a preparation for generalisation we first show that in 2.4.4 for the convex quadri-lateral [A,B,C,D] we have C ∈H1,D ∈H3,A ∈H5, and B ∈H7, so that each of thevertices is in each of these closed half-planes.

76 The parallel axiom; Euclidean geometry Ch. 5
We cannot have A = T as then we would have A ∈ BD; nor can T be any otherpoint of the line AB, for then we would have AT = AB and so C ∈ AB. Thus T �∈ ABand similarly T is not on any of the other side-lines.
As B,D ∈ H1 and T ∈ [B,D] we have T ∈ H1. Then A ∈ AB, T ∈ H1 and T �= Aso by 2.2.3(iv) [A,T ⊂ H1. Now A,T,C are distinct and collinear and T ∈ [A,C] soby 2.1.4(v) we cannot have A ∈ [T,C]. Thus C ∈ [A,T and so C ∈ H1. By a similarargument the other cases follow.
We now establish a converse of this, starting with A,B,C,D as in 2.4.4, with nothree of them collinear and H1,H3,H5,H7 as defined there. We now suppose thatC ∈ H1,D ∈ H3,A ∈ H5,B ∈ H7 and wish to prove that [A,C]∩ [B,D] �= /0.
To start with we note that H1 ∩H3 = I R(|ABC) and [A,C] is a cross-bar ofthis. Now we are given that D ∈ H1,D ∈ H3 so D is in this interior region and bythe cross-bar theorem in 3.4.1 [B,D meets [A,C] in a point T . Similarly H1 ∩H7 =I R(|BAD) and [B,D] is a cross-bar of this. Thus C is in this interior region and bythe cross-bar theorem [A,C meets [B,D] in some point. But the lines AC and BD canmeet only once as otherwise we would have AC = BD which is ruled out. Thus wehave T ∈ [B,D] as well.
Definition . For an integer n ≥ 3 let P1,P2, . . . ,Pn be n points such that no three ofthem are collinear. For each integer j such that 1 ≤ j ≤ n−1 let H2 j−1, H2 j be theclosed half-planes with common edge the line PjPj+1, and H2n−1, H2n the closedhalf-planes with edge PnP1. Suppose that all the points Pk lie in H2 j−1 in each case.Then the intersection
⋂nj=1 H2 j−1 is called a convex polygon. The intersection of
the corresponding open half-planes is called the interior of the convex polygon. Thenotation for convex quadrangles is extended to convex polygons in a straightforwardway.
Consider a convex polygonal region with sides [P1,P2], [P2,P3], . . . , [Pn,P1]. Let apoint U interior to the polygon be joined by segments to the vertices. Then
n−1
∑j=1
Δ[U,Pj,Pj+1]+Δ[U,Pn,P1] =n−1
∑j=2
Δ[P1,Pj,Pj+1]. (5.6.1)
Proof . CASE 1. We first take the case of a triangle so that n = 3. Now [P1,U willmeet [P2,P3] in a point V . Then by 5.6.1(i)
Δ[U,P1,P2]+Δ[U,P2,P3]+Δ[U,P3,P1]
= Δ[U,P1,P2]+{Δ[U,P2,V ]+Δ[U,V,P3]}+Δ[U,P3,P1]
= {Δ[U,P1,P2]+Δ[U,P2,V ]}+{Δ[U,V,P3]+Δ[U,P3,P1]}= Δ[P1,P2,V ]+Δ[V,P3,P1] = Δ[P1,P2,P3].
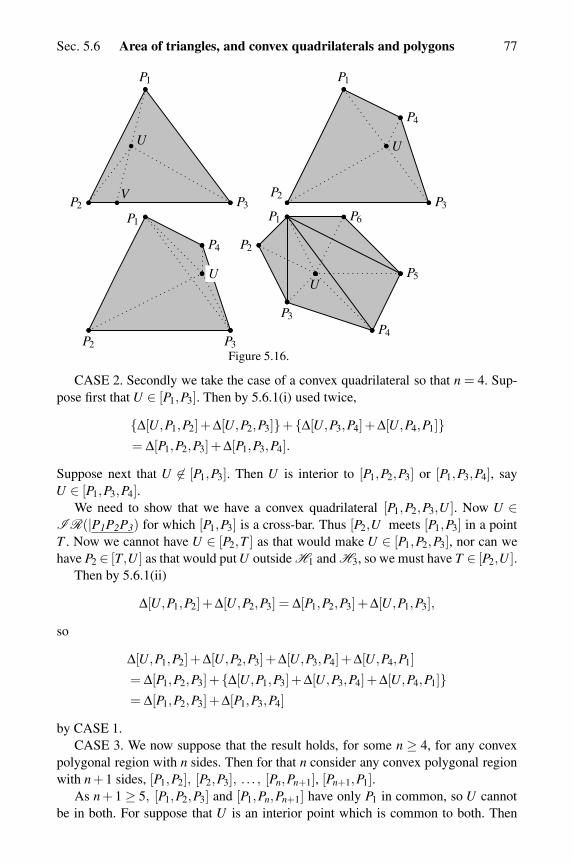
Sec. 5.6 Area of triangles, and convex quadrilaterals and polygons 77
� �
�
�
�
�
�
�
P1
P2 P3V
U
� �
�
�
�
�
�
�
�
�
P1
P2P3
U
P4
� �
�
�
�
�
��
�
�
�
P1
P2 P3
U
P4
�
�
�
�
�
��
�
�
�
�
�
��
�
�
�
�
�
�
P1
P2
P3
U
P4
P5
P6
Figure 5.16.
CASE 2. Secondly we take the case of a convex quadrilateral so that n = 4. Sup-pose first that U ∈ [P1,P3]. Then by 5.6.1(i) used twice,
{Δ[U,P1,P2]+Δ[U,P2,P3]}+{Δ[U,P3,P4]+Δ[U,P4,P1]}= Δ[P1,P2,P3]+Δ[P1,P3,P4].
Suppose next that U �∈ [P1,P3]. Then U is interior to [P1,P2,P3] or [P1,P3,P4], sayU ∈ [P1,P3,P4].
We need to show that we have a convex quadrilateral [P1,P2,P3,U ]. Now U ∈I R(|P1P2P3) for which [P1,P3] is a cross-bar. Thus [P2,U meets [P1,P3] in a pointT . Now we cannot have U ∈ [P2,T ] as that would make U ∈ [P1,P2,P3], nor can wehave P2 ∈ [T,U ] as that would put U outside H1 and H3, so we must have T ∈ [P2,U ].
Then by 5.6.1(ii)
Δ[U,P1,P2]+Δ[U,P2,P3] = Δ[P1,P2,P3]+Δ[U,P1,P3],
so
Δ[U,P1,P2]+Δ[U,P2,P3]+Δ[U,P3,P4]+Δ[U,P4,P1]
= Δ[P1,P2,P3]+{Δ[U,P1,P3]+Δ[U,P3,P4]+Δ[U,P4,P1]}= Δ[P1,P2,P3]+Δ[P1,P3,P4]
by CASE 1.CASE 3. We now suppose that the result holds, for some n ≥ 4, for any convex
polygonal region with n sides. Then for that n consider any convex polygonal regionwith n+1 sides, [P1,P2], [P2,P3], . . . , [Pn,Pn+1], [Pn+1,P1].
As n+ 1 ≥ 5, [P1,P2,P3] and [P1,Pn,Pn+1] have only P1 in common, so U cannotbe in both. For suppose that U is an interior point which is common to both. Then

78 The parallel axiom; Euclidean geometry Ch. 5
[P1,U meets [P2,P3] at a point V �= P2 so that U ∈ [P1,V ]. Also [P1,U meets [Pn−1,Pn]at a point W �= Pn so that U ∈ [P1,W ]. If we write l = P1U and have P1 ≤l U , thenU ≤l V, U ≤l W and as V ≤l W or W ≤l V we have V ∈ [U,W ] or W ∈ [U,V ].
One possibility is that W = V . We cannot have either Pn−1 or Pn on P2P3 as thatwould make three points Pk collinear. Then we have that V = W ∈ [Pn−1,Pn] andV ∈ P2P3 so that Pn−1 and Pn are on different sides of P2P3, that is one is in H3 andthe other is not, whereas all the vertices Pk are in H3. This contradiction implies thatV �=W .
A second possibility is that V ∈ [U,W ], V �=W . Then W �∈H3 whereas Pn−1,Pn ∈H3 and as W ∈ [Pn−1,Pn]⊂ H3 we have a contradiction.
A third and final possibility is that W ∈ [U,V ], W �=V . Then V �∈ H2n−3 whereasP2,P3 ∈ H2n−3 and as V ∈ [P2,P3]⊂ H2n−3 we have a contradiction again.
With this preparation suppose now that U �∈ [P1,P2,P3]. By 5.6.1(ii)
Δ[U,P1,P2]+Δ[U,P2,P3] = Δ[P1,P2,P3]+Δ[U,P1,P3].
Hence as U is interior to the polygon with n sides [P1,P3], [P3,P4], . . .,[Pn,Pn+1], [Pn+1,P1],
n
∑j=1
Δ[U,Pj,Pj+1]+Δ[U,Pn+1,P1]
= Δ[P1,P2,P3]+Δ[U,P1,P3]+n
∑j=3
Δ[U,Pj,Pj+1]+Δ[U,Pn+1,P1]
= Δ[P1,P2,P3]+n
∑j=3
Δ[P1,Pj,Pj+1] =n
∑j=2
Δ[P1,Pj,Pj+1].
If instead U �∈ [P1,Pn,Pn+1] we get the same conclusion by similar reasoning. Theresult now follows by induction on n.
Definition . The area of the polygonal region in the present section is defined tobe the sum of the areas of the triangles involved, as in (5.6.1).
Exercises
5.1 Opposite wedge-angles in a parallelogram have equal degree-measures.
5.2 If two adjacent sides of a rectangle have equal lengths, then all the sides haveequal lengths. Such a rectangle is called a square.
5.3 If the diagonals of a parallelogram have equal lengths, it must be a rectangle.
5.4 If the diagonal lines of a rectangle are perpendicular, it must be a square.
5.5 Let A,B,C be non-collinear points and let P ∈ [A,B and Q ∈ [A,C be such that
|A,P||A,B| =
|A,Q||A,C| .

Sec. 5.6 Area of triangles, and convex quadrilaterals and polygons 79
Then PQ ‖ BC.
5.6 Let AB ⊥ AC and let D = mp(B,C). Prove that |D,A|= |D,B|= |D,C|.5.7 Let A,B,C be non-collinear points and for A∈ [B,P and A∈ [C,Q let PQ ‖BC.
Show that then |A,P||A,B| =
|A,Q||A,C| .
5.8 Suppose that A,B,C are non-collinear points with |A,B| > |A,C| and let D =πBC(A). Prove that then
|A,B|2 −|A,C|2 = |B,D|2 −|C,D|2.
5.9 Suppose that A,B,C are non-collinear points and D is the mid-point of B andC. Prove that then
|A,B|2 + |A,C|2 = 2|B,D|2 +2|A,D|2.
[Hint. Consider the foot of the perpendicular from A to BC.]
5.10 Show that the AAS-principle of congruence in Ex.4.2 can be deduced from5.2.2 and the ASA-principle.
5.11 Show that the AAS-principle of congruence for right-angled triangles in Ex.4.3can be deduced from Pythagoras’ theorem and the SSS-principle.
5.12 For C �∈ AB, suppose that m is the line through C which is parallel to AB. Provethat for any point D �∈ AB the line AD meets m in a unique point E . When,additionally, D∈I R(|BAC) then E is on [A,D and is also on m∩I R(|BAC).
5.13 In a triangle [A,B,C], let |A,B| > |A,C|. Let D ∈ [A,B be such that |A,D| =|A,C|. Prove that then
2|∠BCD|◦ = |∠ACB|◦ − |∠CBA|◦.

This page intentionally left blank

6
Cartesian coordinates;applications
COMMENT. Hitherto we have confined ourselves to synthetic or pure geometricalarguments aided by a little algebra, and traditionally this is continued with. This is adifficult process because of the scarcity of manipulations, operations and transforma-tions to aid us. The main difficulties in synthetic proofs are locational, to show thatpoints are where the diagrams suggest they should be, and in making sure that allpossible cases are covered.
For ease and efficiency we now introduce coordinates, and hence thoroughgoingalgebraic methods. These not only enable us to deal with the concepts already intro-duced but also to elaborate on them in an advantageous way.
In Chapter 6 we do the basic coordinate geometry of lines, segments, half-linesand half-planes. The only use we make of angles here is to deal with perpendicularity.
6.1 FRAME OF REFERENCE, CARTESIAN COORDI-NATES
6.1.1
Definition . A couple or ordered pair F = ([O, I , [O,J ) of half-lines such that OI ⊥OJ, will be called a frame of reference for Π. With it, as standard notation, weshall associate the pair of closed half-planes H1,H2, with common edge OI, andwith J ∈ H1, and the pair of closed half-planes H3,H4, with common edge OJ,and with I ∈ H3. We refer to Q1 = H1 ∩H3, Q2 = H1 ∩H4, Q3 = H2 ∩H4 andQ4 = H2 ∩H3, respectively, as the first, second, third and fourth quadrants ofF . We refer to OI and OJ as the axes and to O as the origin.
Given any point Z in Π, (rectangular) Cartesian coordinates for Z are defined asfollows. Let U be the foot of the perpendicular from Z to OI and V the foot of the
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50006-9

82 Cartesian coordinates; applications Ch. 6
perpendicular from Z to OJ. We let
x =
{ |O,U| if Z ∈ H3,−|O,U| if Z ∈ H4,
and y =
{ |O,V| if Z ∈ H1,−|O,V| if Z ∈ H2.
� ��
�
O I
J
H1
H2
H3H4
Q1Q2
Q3 Q4
Figure 6.1. Frame of reference.
� ��
�
�
��
O I
J H1
H2
H3H4
Z
U
V
Figure 6.2. Cartesian coordinates.
Then the ordered pair (x,y) are called Cartesian coordinates for Z, relative to F . Wedenote this in symbols by Z ≡F (x,y), but when F is fixed and can be understood,we relax this notation to Z ≡ (x,y).
Cartesian coordinates have the following properties:-
(i) If Z ∈ Q1, then x ≥ 0, y ≥ 0; if Z ∈ Q2, then x ≤ 0, y ≥ 0; if Z ∈ Q3, thenx ≤ 0, y ≤ 0; if Z ∈ Q4, then x ≥ 0, y ≤ 0.
(ii) If Z1 ≡ (x1,y1), Z2 ≡ (x2,y2) and
U1 = πOI(Z1), V1 = πOJ(Z1), U2 = πOI(Z2), V2 = πOJ(Z2),
then |U1,U2|=±(x2 − x1), |V1,V2|=±(y2 − y1).
(iii) If Z1 ≡ (x1,y1), Z2 ≡ (x2,y2), then
|Z1,Z2|=√
(x2 − x1)2 +(y2 − y1)2.
(iv) If Z1 ≡ (x1,y1), Z2 ≡ (x2,y2) and Z3 ≡ (x3,y3) where
x3 =12(x1 + x2), y3 =
12(y1 + y2),
then Z3 = mp(Z1,Z2).
(v) Let ≤l be the natural order on l = OI under which O ≤l I. If x1 < x2, U1 ≡(x1,0) and U2 ≡ (x2,0), then U1 ≤l U2.

Sec. 6.1 Frame of reference, Cartesian coordinates 83
Proof .(i) This is clear from the definition of coordinates.(ii) For if Z1,Z2 ∈ H3 we have
|O,U2|= x1, |O,U2|= x2,
and so as U1,U2 ∈ [O, I ,|U1,U2|=±(x2 − x1)
according as U1 ∈ [O,U2] or U2 ∈ [O,U1]. Similarly if Z1,Z2 ∈ H4, we have
|O,U1|=−x1, |O,U2|=−x2
and|U1,U2|=±[−x2 − (−x1)]
according as U1 ∈ [O,U2] or U2 ∈ [O,U1]. Finally if Z1 ∈ H3, Z2 ∈ H4 then
|O,U1|= x1, |O,U2|=−x2
and O ∈ [U1,U2] so that|U1,U2|= x1 +(−x2);
similarly if Z1 ∈ H4,Z2 ∈ H3.
That |V1,V2|=±(y2 − y1) can be shown in the same way.(iii) Now the lines through Z1 parallel to OI and through Z2 parallel to OJ are
perpendicular to each other, and so meet in a unique point Z4. Clearly πOI(Z4) =πOI(Z2)=U2 so Z2 and Z4 have the same first coordinate, x2; πOJ(Z4) = πOJ(Z1) =V1
so Z1 and Z4 have the same second coordinate, y1. Thus Z4 has coordinates (x2,y1).If the points Z1,Z2,Z4 are not collinear, then by Pythagoras’ theorem
|Z1,Z2|2 = |Z1,Z4|2 + |Z4,Z2|2;
if they are collinear we must have Z1 = Z4 or Z2 = Z4 and this identity is trivially true.But |Z1,Z4|= |U1,U2| as [Z1,Z4,U2,U1] is a rectangle, or else Z1 = Z4 and U1 =U2,or Z1 =U1, Z4 =U2. Similarly |Z2,Z4|= |V1,V2|. Thus we have the distance formula
|Z1,Z2|2 = |U1,U2|2 + |V1,V2|2= (x2 − x1)
2 +(y2 − y1)2,
which expresses the distance |Z1,Z2| in terms of the coordinates of Z1 and Z2.(iv) If Z1 = Z2, then x2 = x1, y2 = y1 so that x3 = x1, y3 = y1. Thus Z3 = Z1 =
mp(Z1,Z1), as required.Suppose then that Z1 �= Z2. Note that
|Z1,Z3|2 =[
x1 + x2
2− x1
]2
+
[y1 + y2
2− y1
]2
=
[x2 − x1
2
]2
+
[y2 − y1
2
]2

84 Cartesian coordinates; applications Ch. 6
and so |Z1,Z3|= 12 |Z1,Z2|. Similarly
|Z3,Z2|2 =[
x1 + x2
2− x2
]2
+
[y1 + y2
2− y2
]2
=
[x1 − x2
2
]2
+
[y1 − y2
2
]2
and so |Z3,Z2|= 12 |Z1,Z2|. Then
|Z1,Z3|+ |Z3,Z2|= |Z1,Z2|.
It follows by 3.1.2 and 4.3.1 that Z3 ∈ [Z1,Z2] ⊂ Z1Z2. As |Z1,Z3| = |Z3,Z2| it thenfollows that Z3 = mp(Z1,Z2).
� ��
�
�
���
�
� �
O I
J H1
H2
H3H4
Z1
U1
V1Z4
U2
Z2 V2
Figure 6.3. The distance formula.
� � �
� � �
� � �
U1 O U2
O U1 U2
U1 U2 O
Order of points on the x-axis.
(v) By 2.1.4 at least one of
(a) O ∈ [U1,U2], (b) U1 ∈ [O,U2], (c) U2 ∈ [O,U1],
holds.In (a), U1 and U2 are in different half-lines with end-point O. We cannot have
U1 ∈ [O, I as then we would have x1 ≥ 0, x2 ≤ 0, a contradiction. Thus U2 ∈ [O, I sothat U1 ≤l O, O ≤l U2 and thus U1 ≤l U2.
In (b) we cannot have U1 ≤l O. For then we would have U2 ≤l O and
|O,U1|=−x1, |O,U2|=−x2.
As U1 ∈ [O,U2] we have |O,U1| ≤ |O,U2| which yields −x1 ≤−x2 and so x1 ≥ x2, acontradiction. Hence O ≤l U1 and so as U1 ∈ [O,U2], U1 ≤l U2.
In (c) we cannot have O ≤l U1. For then we would have O ≤l U2 and so
|O,U1|= x1, |O,U2|= x2.
As U2 ∈ [O,U1] we have |O,U2| ≤ |O,U1|, so that x2 ≤ x1, a contradiction. HenceU1 ≤l O so U1 ≤l U2.
Sec. 6.2 Algebraic note on linear equations 85
6.2 ALGEBRAIC NOTE ON LINEAR EQUATIONS
6.2.1
It is convenient to note here some results on solutions of two simultaneous linearequations in two unknowns.
(a) Ifa1,1a2,2 −a1,2a2,1 �= 0, (6.2.1)
then the pair of simultaneous equations
a1,1x+a1,2y = k1,
a2,1x+a2,2y = k2, (6.2.2)
has precisely one solution pair (x,y), and that is given by
(x,y) =
(a2,2k1 −a1,2k2
a1,1a2,2 −a1,2a2,1,
a1,1k2 −a2,1k1
a1,1a2,2 −a1,2a2,1
). (6.2.3)
(b) If
(a1,1,a1,2) �= (0,0) and (a2,1,a2,2) �= (0,0), (6.2.4)
and
a1,1a2,2 −a1,2a2,1 = 0, (6.2.5)
then there is some j �= 0 such that
a2,1 = ja1,1, a2,2 = ja1,2. (6.2.6)
(c) If (6.2.4) holds, then for the system (6.2.2) of simultaneous equations to haveeither no, or more than one, solution pair (x,y) it is necessary and sufficientthat (6.2.5) hold.
Note in particular that when (6.2.4) holds, for the pair of homogeneous linearequations
a1,1x+a1,2y = 0,
a2,1x+a2,2y = 0, (6.2.7)
to have a solution (x,y) other than the obvious one (0,0), it is necessary andsufficient that (6.2.5) hold.

86 Cartesian coordinates; applications Ch. 6
6.3 CARTESIAN EQUATION OF A LINE
6.3.1
Given any line l ∈ Λ, there are numbers a,b and c, with the case a = b = 0 excluded,such that Z ≡ (x,y) ∈ l if and only if
ax+by+ c = 0.
Proof . Take any point Z2 ≡ (x2,y2) �∈ l and let Z3 ≡ (x3,y3) = sl(Z2). Then Z2 �=Z3. Now l is the perpendicular bisector of [Z2,Z3], so by 4.1.1 Z ∈ l if and onlyif |Z,Z2| = |Z,Z3|. As these are both non-negative, this is the case if and only if|Z,Z2|2 = |Z,Z3|2. By 6.1.1 this happens if and only if
(x− x2)2 +(y− y2)
2 = (x− x3)2 +(y− y3)
2.
This simplifies to
2(x3 − x2)x+2(y3 − y2)y+ x22 + y2
2 − x23 − y2
3 = 0.
On writing
a = 2(x3 − x2), b = 2(y3 − y2), c = x22 + y2
2 − x23 − y2
3,
we see that Z ≡ (x,y) ∈ l if and only ax+by+ c = 0. Now a = b = 0 corresponds tox2 = x3, y2 = y3, which is ruled out as Z2 �= Z3.
COROLLARY. Let Z0 ≡ (x0,y0),Z1 ≡ (x1,y1) be distinct points and Z ≡ (x,y).Then Z ∈ Z0Z1 if and only if
−(y1 − y0)(x− x0)+ (x1 − x0)(y− y0) = 0.
Proof . By the theorem, there exist numbers a,b,c, with the case a = b = 0 ex-cluded, such that Z ∈ Z0Z1 if and only if ax+ by+ c = 0. As Z0,Z1 ∈ Z0Z1 we thenhave
ax0 +by0 + c = 0,
ax1 +by1 + c = 0.
We subdivide into two cases as follows.CASE 1. Let x0 �= x1. We rewrite our equations as
ax1 + c =−by1,
ax0 + c =−by0,
and regard these as equations in the unknowns a and c. As x1 − x0 �= 0, we note thatby 6.2.1 we must have
a =−b(y1 − y0)
x1 − x0, c =
−b(x1y0 − x0y1)
x1 − x0.

Sec. 6.3 Cartesian equation of a line 87
Note that b �= 0, as b = 0 would imply a = 0 here. On inserting these values for a andc above we see that Z ∈ l if and only if
−b(y1 − y0)
x1 − x0x+by+
−b(x1y0 − x0y1)
x1 − x0= 0,
and so as b/(x1 − x0) �= 0, if and only if
−(y1 − y0)x+(x1 − x0)y− x1y0 + x0y1 = 0.
This is equivalent to the stated equation.CASE 2. Let y0 �= y1. We rewrite our equations as
by1 + c =−ax1,
by0 + c =−ax0,
and note that, as y1 − y0 �= 0, by 6.2.1 we must have
b =−a(x1 − x0)
y1 − y0, c =
−a(y1x0 − y0x1)
y1 − y0.
Note that a �= 0, as a = 0 would imply b = 0 here. On inserting these values for b andc above we see that Z ∈ l if and only if
ax+−a(x1 − x0)
y1 − y0y+
−a(y1x0 − y0x1)
y1 − y0= 0,
and so as −a/(y1 − y0) �= 0, if and only if
−(y1 − y0)x+(x1 − x0)y− x1y0 + x0y1 = 0.
This is equivalent to the stated equation.Now either CASE 1 or CASE 2 (or both) must hold, as otherwise we have x0 =
x1, y0 = y1 and so Z0 = Z1, contrary to what is given.
Definition . If l ∈ Λ and l = {Z ≡ (x,y) : ax+by+c = 0}, we call ax+by+c = 0a Cartesian equation of l relative to F , and we write l ≡F ax+ by+ c = 0. WhenF can be understood we relax this to l ≡ ax+by+ c = 0.
Let l ∈ Λ be a line, with Cartesian equation(i)
ax+by+ c = 0.
Then l also has(ii)
a1x+b1y+ c1 = 0,
as an equation if and only if(iii)
a1 = ja, b1 = jb, c1 = jc,

88 Cartesian coordinates; applications Ch. 6
for some j �= 0.Proof .Necessity. Suppose first that l can be expressed in each of the forms (i) and (ii)
above. We subdivide into four cases as follows.CASE 1. Suppose that a �= 0, b �= 0 and c �= 0. Then we note from (i) that the
points A ≡ (−c/a,0) and B ≡ (0,−c/b) are in l, and are in fact the only points of l ineither OI or OJ, as A is the only point with y = 0 and B is the only point with x = 0.
We now note that none of a1,b1,c1 can be equal to 0. For if a1 = 0, by (ii) wewould have y =−c1/b1 for all points Z in l; this would make l parallel to OI and givea contradiction. Similarly b1 = 0 would imply that x = −c1/a1 for all points Z in l,making l parallel to OJ and again giving a contradiction. Moreover if c1 = 0, by (ii)we would have that O ∈ l, again a contradiction.
We note from (ii) that the points A1 ≡ (−c1/a1,0), B1 ≡ (0,−c1/b1) are in l andare in fact the only points of l in either OI or OJ. Thus we must have A1 = A, B1 = Band so
− c1
a1=− c
a, − c1
b1=− c
b.
Thusa1
a=
b1
b=
c1
c,
and if we denote the common value of these by j, we have j �= 0 and (iii).CASE 2. Suppose that a = 0. Then b �= 0 and by (i) for every Z ∈ l we have
y = −c/b, so that l contains B and is parallel to OI; when c �= 0, l has no point incommon with OI, and when c = 0, l coincides with OI. Now we must have a1 = 0, asotherwise l would meet OI in the unique point A1, and that would give a contradiction.Then b1 �= 0 and for every Z ∈ l we have y = −c1/b1, so that l contains B1 and isparallel to OI. Thus we must have
− c1
b1=− c
b.
When c = 0, this implies that c1 = 0, so that if we take j = b1/b, we have satisfied(iii). When c �= 0, we must have that b1/b = c1/c, and if we take j to be the commonvalue of these we have (iii) again.
CASE 3. Suppose that b = 0. This is treated similarly to CASE 2.CASE 4. Finally suppose that a �= 0, b �= 0 and c = 0. Then by (i) we see that
O ∈ l and then by (ii) we must have c1 = 0. We see from (i) that C ≡ (1,−a/b) is inl, and on using this information in (ii) we find that a1 +b1(−a/b) = 0. This impliesthat a1/a = b1/b, and if we take j to be the common value of these, we must have(iii).
This establishes the necessity of (iii).
Sufficiency Suppose now that (iii) holds. Then a1x+ b1y+ c1 = j(ax+ by+ c)and as j �= 0 we have a1x+b1y+ c1 = 0 if and only if ax+by+ c = 0.
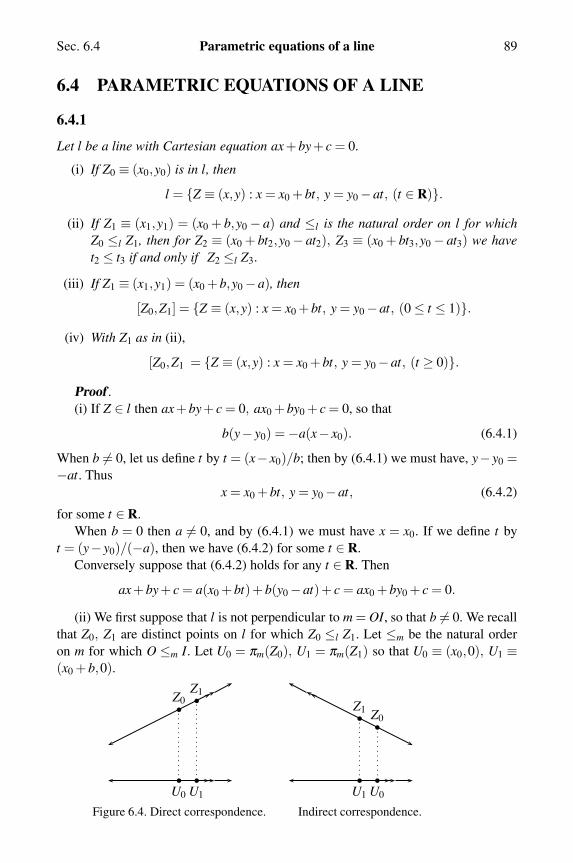
Sec. 6.4 Parametric equations of a line 89
6.4 PARAMETRIC EQUATIONS OF A LINE
6.4.1
Let l be a line with Cartesian equation ax+by+ c = 0.
(i) If Z0 ≡ (x0,y0) is in l, then
l = {Z ≡ (x,y) : x = x0 +bt, y = y0 −at, (t ∈ R)}.
(ii) If Z1 ≡ (x1,y1) = (x0 + b,y0 − a) and ≤l is the natural order on l for whichZ0 ≤l Z1, then for Z2 ≡ (x0 + bt2,y0 − at2), Z3 ≡ (x0 + bt3,y0 − at3) we havet2 ≤ t3 if and only if Z2 ≤l Z3.
(iii) If Z1 ≡ (x1,y1) = (x0 +b,y0 −a), then
[Z0,Z1] = {Z ≡ (x,y) : x = x0 +bt, y = y0 −at, (0 ≤ t ≤ 1)}.
(iv) With Z1 as in (ii),
[Z0,Z1 = {Z ≡ (x,y) : x = x0 +bt, y = y0 −at, (t ≥ 0)}.
Proof .(i) If Z ∈ l then ax+by+ c = 0, ax0 +by0 + c = 0, so that
b(y− y0) =−a(x− x0). (6.4.1)
When b �= 0, let us define t by t = (x− x0)/b; then by (6.4.1) we must have, y− y0 =−at. Thus
x = x0 +bt, y = y0 −at, (6.4.2)
for some t ∈ R.When b = 0 then a �= 0, and by (6.4.1) we must have x = x0. If we define t by
t = (y− y0)/(−a), then we have (6.4.2) for some t ∈ R.Conversely suppose that (6.4.2) holds for any t ∈ R. Then
ax+by+ c = a(x0 +bt)+b(y0 −at)+ c = ax0 +by0 + c = 0.
(ii) We first suppose that l is not perpendicular to m = OI, so that b �= 0. We recallthat Z0, Z1 are distinct points on l for which Z0 ≤l Z1. Let ≤m be the natural orderon m for which O ≤m I. Let U0 = πm(Z0), U1 = πm(Z1) so that U0 ≡ (x0,0), U1 ≡(x0 +b,0).
� �
�
�
U0 U1
Z0Z1
Figure 6.4. Direct correspondence.
� �
�
�
U0U1
Z0Z1
Indirect correspondence.
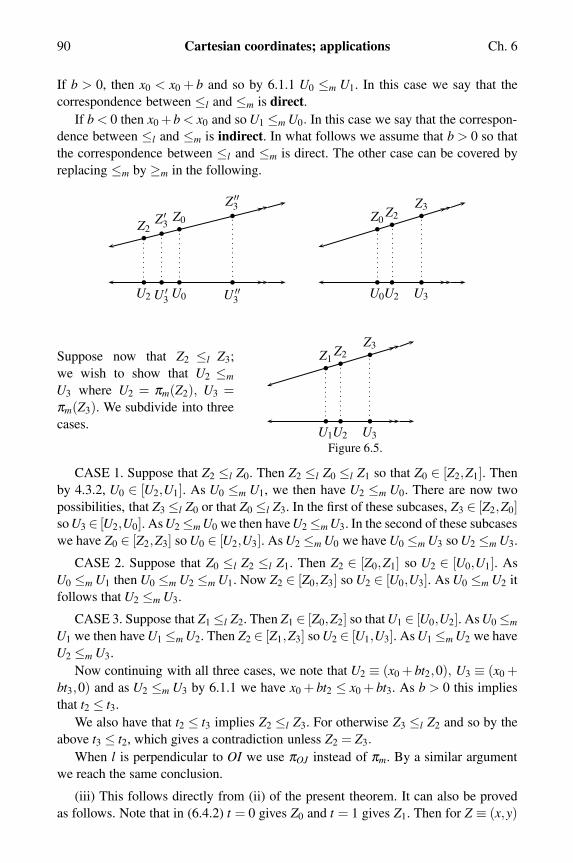
90 Cartesian coordinates; applications Ch. 6
If b > 0, then x0 < x0 + b and so by 6.1.1 U0 ≤m U1. In this case we say that thecorrespondence between ≤l and ≤m is direct.
If b < 0 then x0 +b < x0 and so U1 ≤m U0. In this case we say that the correspon-dence between ≤l and ≤m is indirect. In what follows we assume that b > 0 so thatthe correspondence between ≤l and ≤m is direct. The other case can be covered byreplacing ≤m by ≥m in the following.
� � � �
��
�
�
U0U2
Z0Z2
U ′3 U ′′
3
Z′3
Z′′3
� � �
��
�
U0U2
Z0Z2
U3
Z3
Suppose now that Z2 ≤l Z3;we wish to show that U2 ≤m
U3 where U2 = πm(Z2), U3 =πm(Z3). We subdivide into threecases. � � �
��
�
U1U2
Z1Z2
U3
Z3
Figure 6.5.
CASE 1. Suppose that Z2 ≤l Z0. Then Z2 ≤l Z0 ≤l Z1 so that Z0 ∈ [Z2,Z1]. Thenby 4.3.2, U0 ∈ [U2,U1]. As U0 ≤m U1, we then have U2 ≤m U0. There are now twopossibilities, that Z3 ≤l Z0 or that Z0 ≤l Z3. In the first of these subcases, Z3 ∈ [Z2,Z0]so U3 ∈ [U2,U0]. As U2 ≤m U0 we then have U2 ≤m U3. In the second of these subcaseswe have Z0 ∈ [Z2,Z3] so U0 ∈ [U2,U3]. As U2 ≤m U0 we have U0 ≤m U3 so U2 ≤m U3.
CASE 2. Suppose that Z0 ≤l Z2 ≤l Z1. Then Z2 ∈ [Z0,Z1] so U2 ∈ [U0,U1]. AsU0 ≤m U1 then U0 ≤m U2 ≤m U1. Now Z2 ∈ [Z0,Z3] so U2 ∈ [U0,U3]. As U0 ≤m U2 itfollows that U2 ≤m U3.
CASE 3. Suppose that Z1 ≤l Z2. Then Z1 ∈ [Z0,Z2] so that U1 ∈ [U0,U2]. As U0 ≤m
U1 we then have U1 ≤m U2. Then Z2 ∈ [Z1,Z3] so U2 ∈ [U1,U3]. As U1 ≤m U2 we haveU2 ≤m U3.
Now continuing with all three cases, we note that U2 ≡ (x0 + bt2,0), U3 ≡ (x0 +bt3,0) and as U2 ≤m U3 by 6.1.1 we have x0 + bt2 ≤ x0 + bt3. As b > 0 this impliesthat t2 ≤ t3.
We also have that t2 ≤ t3 implies Z2 ≤l Z3. For otherwise Z3 ≤l Z2 and so by theabove t3 ≤ t2, which gives a contradiction unless Z2 = Z3.
When l is perpendicular to OI we use πOJ instead of πm. By a similar argumentwe reach the same conclusion.
(iii) This follows directly from (ii) of the present theorem. It can also be provedas follows. Note that in (6.4.2) t = 0 gives Z0 and t = 1 gives Z1. Then for Z ≡ (x,y)

Sec. 6.4 Parametric equations of a line 91
with x and y as in (6.4.2), by 6.1.1 we have
|Z0,Z|=√(x− x0)2 +(y− y0)2 =
√(bt)2 +(−at)2 = |t|
√b2 +a2,
|Z1,Z|=√(bt − t)2 +(a−at)2 =
√(t −1)2(b2 +a2) = |t−1|
√b2 +a2,
|Z0,Z1|=√
b2 +(−a)2 =√
b2 +a2.
Thus when t < 0,
|Z0,Z|= (−t)√
b2 +a2, |Z1,Z|= (1− t)√
b2 +a2,
and so |Z,Z0|+ |Z0,Z1|= |Z,Z1|; thus by 3.1.2 and (i) above, Z0 ∈ [Z,Z1],Z0 �= Z, Z �= Z1.
When 0 ≤ t ≤ 1,
|Z0,Z|= t√
b2 +a2, |Z,Z1|= (1− t)√
b2 +a2,
and so |Z0,Z|+ |Z,Z1|= |Z0,Z1| ; thus Z ∈ [Z0,Z1].When t > 1,
|Z0,Z|= t√
b2 +a2, |Z1,Z|= (t −1)√
b2 +a2,
and so |Z0,Z1|+ |Z1,Z|= |Z0,Z|; thus Z1 ∈ [Z0,Z] and Z �= Z0, Z �= Z1.These combined show that the values of t for which 0 ≤ t ≤ 1 are those for which
Z ∈ [Z0,Z1].(iv) This follows directly from (ii) of the present theorem. It can also be proved as
follows. As in the proof of (iii) above, we see that the values of t for which t ≥ 0 arethose for which Z ∈ [Z0,Z1 .
COROLLARY. Let Z0 ≡ (x0,y0) and Z1 ≡ (x1,y1) be distinct points. Then the fol-lowing hold:-
(i)
Z0Z1 = {Z ≡ (x,y) : x = x0 + t(x1 − x0), y = y0 + t(y1 − y0), t ∈ R}.
(ii) Let ≤l be the natural order on l = Z0Z1 for which Z0 ≤l Z1. Let
Z2 ≡ (x0 + t2(x1 − x0),y0 + t2(y1 − y0)) ,
Z3 ≡ (x0 + t3(x1 − x0),y0 + t3(y1 − y0)) .
Then we have t2 ≤ t3 if and only if Z2 ≤l Z3.
(iii)
[Z0,Z1] = {Z ≡ (x,y) : x = x0 + t(x1 − x0), y = y0 + t(y1 − y0), 0 ≤ t ≤ 1}.

92 Cartesian coordinates; applications Ch. 6
(iv)
[Z0,Z1 = {Z ≡ (x,y) : x = x0 + t(x1 − x0), y = y0 + t(y1 − y0), t ≥ 0}.
Proof . By 6.3.1, in the above we can take a = −(y1 − y0), b = x1 − x0 and theconclusions follow immediately.
NOTE. We refer to
x = x0 +bt, y = y0 −at, (t ∈ R)
in 6.4.1 as parametric equations of the line l, and t as the parameter of the pointZ ≡ (x,y).
6.5 PERPENDICULARITY ANDPARALLELISM OF LINES
6.5.1
Let l ≡ ax+by+ c = 0, m ≡ a1x+b1y+ c1 = 0.
(i) Then l ⊥ m if and only ifaa1 +bb1 = 0. (6.5.1)
(ii) Also l ‖ m if and only ifab1 −a1b = 0. (6.5.2)
Proof .(i) Suppose that l ⊥ m. Then l meets m in a unique point which we denote by Z0.
By 6.4.1 Z1 ≡ (x0 + b,y0 − a) is a point of l and similarly Z2 ≡ (x0 + b1,y0 − a1) isa point of m. Now by Pythagoras’ theorem |Z0,Z1|2 + |Z0,Z2|2 = |Z1,Z2|2 and so by6.1.1
[b2 +(−a)2]+ [b21 +(−a1)
2] = (b−b1)2 +(a1 −a)2.
This simplifies to (6.5.1).Conversely suppose that (6.5.1) holds. Then we cannot have (6.5.2) as well. For
if we did, on multiplying (6.5.1) by a and (6.5.2) by b we would find that
a2a1 +abb1 = 0, −b2a1 +abb1 = 0,
so that (a2 +b2)a1 = 0, and hence as (a,b) �= (0,0), a1 = 0. Similarly
aba1 +b2b1 = 0,−aba1 +a2b1 = 0,
so that b1 = 0 as well, giving a contradiction. We now search for a point of intersec-tion of l and m, and so consider solving for (x,y) the simultaneous equations
ax+by =−c, a1x+b1y =−c1.

Sec. 6.6 Projection and axial symmetry 93
As ab1 −a1b �= 0, by 6.2.1 these will have a unique solution, yielding a point whichwe shall denote by Z0 ≡ (x0,y0). Then by 6.4.1
l = {Z ≡ (x,y) : x = x0 +bt, y = y0 −at, t ∈ R},m = {Z ≡ (x,y) : x = x0 +b1t, y = y0 −a1t, t ∈ R}.
We choose Z1 ∈ l, Z2 ∈ m as above, and from (6.5.1) find that |Z0,Z1|2 + |Z0,Z2|2 =|Z1,Z2|2. By 6.4.1 we can conclude that l ⊥ m.
(ii) By 6.2.1 the equations ax + by + c = 0, a1x + b1y+ c1 = 0 have either nosolution or more than one if and only if (6.5.2) holds.
Alternatively, by (i) above we have l ‖ m if and only if there is some (a2,b2) �=(0,0) such that
aa2 +bb2 = 0, a1a2 +b1b2 = 0.
But the equationsau+bv = 0, a1u+b1v = 0,
have a solution (u,v) other than (0,0) if and only if ab1 −a1b = 0. Thus (6.5.2) is acondition for l and m to be parallel.
COROLLARY .
(i) The lines Z1Z2 and Z3Z4 are perpendicular if and only if
(y2 − y1)(y4 − y3)+ (x2 − x1)(x4 − x3) = 0.
(ii) These lines are parallel if and only if
−(y2 − y1)(x4 − x3)+ (y4 − y3)(x2 − x1) = 0.
6.6 PROJECTION AND AXIALSYMMETRY
6.6.1
Let l ≡ ax+by+ c = 0 and Z0 ≡ (x0,y0). Then
(i)
|Z0,πl(Z0)|= |ax0 +by0 + c|√a2 +b2
.
(ii)
πl(Z0)≡(x0 − a
a2 +b2 (ax0 +by0 + c), y0 − ba2 +b2 (ax0 +by0 + c)
).

94 Cartesian coordinates; applications Ch. 6
(iii)
sl(Z0)≡(x0 − 2a
a2 +b2 (ax0 +by0 + c), y0 − 2ba2 +b2 (ax0 +by0 + c)
).
Proof . Let m be the line such that l ⊥ m and Z0 ∈ m. Then as l ⊥ m, by 6.5.1 wewill have m ≡−bx+ay+ c1 = 0 for some c1, and as Z0 ∈ m we have c1 = bx0 −ay0.To find the coordinates (x,y) of πl(Z0) we need to solve simultaneously the equations
ax+by =−c, −bx+ay =−bx0 +ay0.
As for (i) we shall then go on to apply 6.1.1 it is (x− x0)2 and (y− y0)
2 that we shallactually use, and it is easier to work directly with these. We rewrite the equations as
a(x− x0)+b(y− y0) =−(ax0 +by0 + c),
−b(x− x0)+a(y− y0) = 0.
Now on squaring each of these and adding, we find that
(a2 +b2)[(x− x0)2 +(y− y0)
2] = (ax0 +by0 + c)2.
The conclusion (i) now readily follows.For (ii) we solve these equations, obtaining
x− x0 =− aa2 +b2 (ax0 +by0 + c), y− y0 =− b
a2 +b2 (ax0 +by0 + c)).
For (iii) we recall that if sl(Z0) ≡ (x1,y1) and πl(Z0) ≡ (x2,y2), then asmp(Z0,sl(Z0)) = πl(Z0) we have x1 + x0 = 2x2, y1 + y0 = 2y2. Now x2 and y2 aregiven by (ii) of the present theorem, and the result follows.
6.6.2 Formula for area of a triangle
Let Z1 ≡F (x1,y1),Z2 ≡F (x2,y2) and Z3 ≡F (x3,y3) be non- collinear points. Thenthe area Δ[Z1,Z2,Z3] is equal to |δF (Z1,Z2,Z3)| where
δF (Z1,Z2,Z3) =12 [x1(y2 − y3)− y1(x2 − x3)+ x2y3 − x3y2]
= 12 det
⎛⎝ x1 y1 1
x2 y2 1x3 y3 1
⎞⎠ .
Proof . By 6.3.1 Z2Z3 ≡−(y3 − y2)(x − x2) + (x3 −x2)(y − y2) = 0, so by 6.6.1|Z1,πZ2Z3(Z1)| is equal to|−(y3−y2)(x1−x2)+(x3−x2)(y1−y2)|√
(y3−y2)2+(x3−x2)2.
But Δ[Z1,Z2,Z3] =12 |Z2,Z3||Z1,πZ2Z3(Z1)|, andthe denominator above is equalto |Z2,Z3|. Hence the area isequal to half the numerator.
Z3
Z1
Z2πZ2Z3(Z1)
Figure 6.6. Area of a triangle.

Sec. 6.7 Coordinate treatment of harmonic ranges 95
6.6.3 Inequalities for closed half-planes
Let l ≡ ax+by+ c = 0. Then the sets
{Z ≡ (x,y) : ax+by+ c ≤ 0}, (6.6.1)
{Z ≡ (x,y) : ax+by+ c ≥ 0}, (6.6.2)
are the closed half-planes with common edge l.Proof . Let Z1 ≡ (x1,y1) be a point not in l, and let sl(Z1) = Z2 ≡ (x2,y2). Let
Z ≡ (x,y). Then as in 6.3.1, Z ∈ l if and only if |Z,Z1|2 = |Z,Z2|2, and this occurswhen (x− x1)
2 +(y− y1)2 = (x− x2)
2 +(y− y2)2, which simplifies to
2(x2 − x1)x+2(y2 − y1)y+ x21 + y2
1 − x22 − y2
2 = 0.
This is an equation for l and so by 6.3.1 there is some j �= 0 such that
ax+by+ c = j[2(x2 − x1)x+2(y2 − y1)y+ x2
1 + y21 − x2
2 − y22
].
By 4.3.4 the sets{Z ≡ (x,y) : 2(x2 − x1)x+2(y2 − y1)y+ x2
1 + y21 − x2
2 − y22 ≤ 0
}, (6.6.3){
Z ≡ (x,y) : 2(x2 − x1)x+2(y2 − y1)y+ x21 + y2
1 − x22 − y2
2 ≥ 0}, (6.6.4)
are the closed half-planes with edge l, as they correspond to |Z,Z1| ≤ |Z,Z2| and|Z,Z1| ≥ |Z,Z2|, respectively. But when j > 0, (6.6.1) and (6.6.3) coincide as do(6.6.2) and (6.6.4), while when j < 0, (6.6.1) and (6.6.4) coincide as do (6.6.2) and(6.6.3).
6.7 COORDINATE TREATMENT OF HARMONICRANGES
6.7.1 New parametrisation of a line
As in 6.4.1, if Z1 ≡ (x1,y1), Z2 ≡ (x2,y2), Z ≡ (x,y) where x = x1 + t(x2 − x1), y =y1 + t(y2 − y1), then Z ∈ Z1Z2 and
|Z1,Z|2 = [t(y2 − y1)]2 +[t(y2 − y1)]
2 = t2|Z1,Z2|2,|Z,Z2|2 = [(1− t)(x2 − x1)]
2 +[(1− t)(y2 − y1)]2 = (1− t)2|Z1,Z2|2,
|Z1,Z||Z,Z2| =
∣∣∣∣ t1− t
∣∣∣∣ .Accordingly, if we write t
1−t = λ where λ �= 0 and so have t = λ1+λ , we have
|Z1,Z||Z,Z2| = |λ |.

96 Cartesian coordinates; applications Ch. 6
Thus Z divides (Z1,Z2) in the ratio |λ | : 1.Changing our notation slightly, if we denote by Z3 ≡ (x3,y3) the point with
x3 = x1 +λ
1+λ(x2 − x1) =
11+λ
x1 +λ
1+λx2,
y3 = y1 +λ
1+λ(y2 − y1) =
11+λ
y1 +λ
1+λy2,
then Z3 divides (Z1,Z2) in the ratio |λ | : 1. Consequently if we denote by Z4 ≡ (x4,y4)the point with
x4 =1
1+λ ′ x1 +λ ′
1+λ ′ x2, y4 =1
1+λ ′ y1 +λ ′
1+λ ′ y2,
where λ ′ =−λ , so that
x4 =1
1−λx1 − λ
1−λ, y4 =
11−λ
y1 − λ1−λ
y2,
then Z4 also divides (Z1,Z2) in the ratio |−λ | : 1 = |λ | : 1.Now λ = t
1−t and if we write −λ = s1−s we have Z4 in the original format,
x4 = x1 + s(x2 − x1), y4 = y1 + s(y2 − y1).
Thent
1− t=− s
1− s
so that
s =12 t
t − 12
.
Thus
s− 12 =
12 t
t − 12
− 12=
12 t − 1
2 t + 14
t − 12
= 14
1
t − 12
.
Hence (s− 1
2
)(t − 1
2
)= 1
4 ,∣∣(s− 1
2)(t − 12)∣∣= 1
4 . (6.7.1)
Then we have three possibilities,
(a)∣∣t − 1
2
∣∣< 12 ,
∣∣s− 12
∣∣> 12 ,
(b)∣∣s− 1
2
∣∣< 12 ,
∣∣t − 12
∣∣> 12 ,
(c)∣∣s− 1
2
∣∣= 12 ,
∣∣t − 12
∣∣= 12 .
In (a) we have − 12 < t− 1
2 <12 and either s− 1
2 <− 12 or s− 1
2 >12 . Hence 0< t < 1
and either s < 0 or s > 1. It follows that Z3 ∈ [Z1,Z2], Z4 �∈ [Z1,Z2].The situation in (b) is like that in (a) with the roles of t and s, and so of Z3 and Z4
interchanged.
Sec. 6.7 Coordinate treatment of harmonic ranges 97
In (c) − 12 = t − 1
2 or t − 12 = 1
2 , so either t = 0 or t = 1. Similarly either s = 0 ors = 1. We rule out the case of t = 1 as then λ would be undefined, and we rule outthe case of s = 1 as then −λ would be undefined. What remains is t = s = 0 and weexcluded this by taking λ �= 0; it would imply that Z3 = Z4 = Z1.
Thus just one of Z3,Z4 is in the segment [Z1,Z2] and the other is on the line Z1Z2
but outside this segment. Hence Z3 and Z4 divide {Z1,Z2} internally and externallyin the same ratio. We recall that we then call (Z1,Z2,Z3,Z4) a harmonic range.
We note above that there can be no solution for s if t = 12 ; thus there is no cor-
responding Z4 when Z3 is the mid-point Z0 of Z1 and Z2. Similarly there can be nosolution for t if s = 1
2 ; thus there is no corresponding Z3 when Z4 is Z0.
6.7.2 Interchange of pairs of points
If the points Z3 and Z4 divide {Z1,Z2} internally and externally in the same ratio, thenit turns out that the points Z1 and Z2 also divide {Z3,Z4} internally and externally inthe same ratio.
Proof . For we had
x3 =1
1+λx1 +
λ1+λ
x2, y3 =1
1+λy1 +
λ1+λ
y2,
x4 =1
1−λx1 − λ
1−λx2, y4 =
11−λ
y1 − λ1−λ
y2.
Then
(1+λ )x3 = x1 +λx2,
(1−λ )x4 = x1 −λx2.
By addition and subtraction, we find that
x1 =1+λ
2x3 +
1−λ2
x4,
x2 =1+λ
2λx3 +
λ −12λ
x4,
and by a similar argument,
y1 =1+λ
2y3 +
1−λ2
y4,
y2 =1+λ
2λy3 +
λ −12λ
y4.
If we define μ by1
1+μ=
1+λ2
,
so that
μ =1−λ1+λ
,μ
1+μ=
1−λ2
,

98 Cartesian coordinates; applications Ch. 6
then
x1 =1
1+μx3 +
μ1+μ
x4, y1 =1
1+μy3 +
μ1+μ
y4.
If we define μ ′ by1
1+μ ′ =1+λ
2λ,
so that
μ ′ =λ −11+λ
,μ ′
1+μ ′ =λ −1
2λ,
then
x2 =1
1+μ ′ x3 +μ ′
1+μ ′ x4, y2 =1
1+μ ′ y3 +μ ′
1+μ ′ y4.
As μ ′ = −μ , this shows that Z1 and Z2 divide {Z3,Z4} internally and externally inthe same ratio.
6.7.3 Distances from mid-point
Let Z0 be the mid-point of distinct points Z1 and Z2. Then points Z3,Z4 ∈ Z1Z2 divide{Z1,Z2} internally and externally in the same ratio if and only if Z3 and Z4 are on theone side of Z0 on the line Z1Z2 and
|Z0,Z3||Z0,Z4|= 14 |Z1,Z2|2.
Proof . We have Z0 ≡ (x0,y0) where x0 =12(x1 + x2), y0 =
12(y1 + y2). Then
x3 − x0 = (t − 12)(x2 − x1), y3 − y0 = (t − 1
2 )(y2 − y1),
x4 − x0 = (s− 12 )(x2 − x1), y4 − y0 = (s− 1
2)(y2 − y1),
and so|Z0,Z3||Z0,Z4|= |(t − 1
2
)(s− 1
2
)||Z1,Z2|2.By (6.7.1) Z3,Z4 divide {Z1,Z2} internally and externally in the same ratio if andonly if
(s− 1
2
)(t − 1
2
)= 1
4 . This is equivalent to having |(s− 12
)(t − 1
2
)| = 14 and(
s− 12
)(t − 1
2
)> 0. The latter is equivalent to having either s− 1
2 > 0 and t − 12 > 0,
or s− 12 < 0 and t − 1
2 < 0, so that Z3 and Z4 are on the one side of Z0 on the lineZ1Z2.
6.7.4 Distances from end-point
Let {Z3,Z4} divide {Z1,Z2} internally and externally in the same ratio with Z2 ∈[Z1,Z4]. Then
12
(1
|Z1,Z3| +1
|Z1,Z4|)=
1|Z1,Z2| .
Proof . We have as before
x3 = x1 +λ
1+λ(x2 − x1), y3 = y1 +
λ1+λ
(y2 − y1),

Sec. 6.7 Coordinate treatment of harmonic ranges 99
x4 = x1 +λ
λ −1(x2 − x1), y4 = y1 +
λλ −1
(y2 − y1),
Now λ/(λ − 1) > 1 and so λ > 1. Hence 12 < λ/(1+λ ) < 1, and so Z3 ∈ [Z1,Z2].
Thus Z2,Z3 and Z4 are on the one side of Z1 on the line Z1Z2. Then
|Z1,Z3||Z1,Z2| =
λλ +1
,|Z1,Z4||Z1,Z2| =
λλ −1
,
so that|Z1,Z2||Z1,Z3| =
λ +1λ
,|Z1,Z2||Z1,Z4| =
λ −1λ
,
and so|Z1,Z2||Z1,Z3| +
|Z1,Z2||Z1,Z4| =
λ +1λ
+λ −1
λ= 2.
Hence12
(1
|Z1,Z3| +1
|Z1,,Z4|)=
1|Z1,Z2| .
This is expressed by saying that |Z1,Z2| is the harmonic mean of |Z1,Z3| and|Z1,Z4|.
6.7.5 Construction for a harmonic range
���� �
�
�
�
� �
�
Z1
W3
Z2Z3
Z4
W1
l W2
Figure 6.7.
Let Z1,Z2,Z3 be distinct collinear points with Z3 not the mid-point of Z1 and Z2. Takeany points W1 and W2, not on Z1Z2, so that Z2 is the mid-point of W1 and W2. Let lbe the line through Z1 which is parallel to W1W2 and let W3 be the point in whichW1Z3 meets l, with Z4 the point in which W2W3 meets Z1Z2. Then (Z1,Z2,Z3,Z4) is aharmonic range.
Proof. Without loss of generality we may take the x-axis to be the line Z1Z2 andso take coordinates
Z1 ≡ (x1,0), Z2 ≡ (x2,0), Z3 ≡ (x3,0), Z4 ≡ (x4,0),
and W1 ≡ (u1,v1), W2 ≡ (2x2 −u1,−v1). The lines l and W1Z3 have equations
(u1 − x2)y = v1(x− x1), (u1 − x3)y = v1(x− x3),

100 Cartesian coordinates; applications Ch. 6
respectively, and so W3 has coordinates
u3 =x3(u1 − x2)− x1(u1 − x3)
x3 − x2, v3 = v1
x3 − x1
x3 − x2.
On forming the equation of W2W3 and finding where it meets Z1Z2 we obtain
x4 =−x3(x1 + x2)+2x1x2
x1 + x2 −2x3,
from which it follows that
x4 − x1 =(x1 − x2)(x3 − x1)
x1 + x2 −2x3, x2 − x4 =
(x1 − x2)(x3 − x2)
x1 + x2 −2x3.
From these we see thatx4 − x1
x2 − x4=−x3 − x1
x2 − x3.
Exercises
6.1 Suppose that Z1,Z2,Z3 are non-collinear points and Z5 = mp{Z3,Z1},Z6 = mp{Z1,Z2}. Show that if |Z2,Z5|= |Z3,Z6|, then |Z3,Z1|= |Z1,Z2|.(Hint. Select a frame of reference to simplify the calculations).
6.2 Let l1, l2 be distinct intersecting lines and Z0 a point not on either of them.Show that there are unique points Z1 ∈ l1, Z2 ∈ l2 such that Z0 is the mid-pointof Z1 and Z2.
6.3 Suppose that Z1,Z2,Z3 are non-collinear points. Show that the points Z ≡ (x,y),the perpendicular distances from which to the lines Z1Z2, Z1Z3 are equal, arethose the coordinates of which satisfy
−(y2 − y1)(x− x1)+ (x2 − x1)(y− y1)√(x2 − x1)2 +(y2 − y1)2
± −(y3 − y1)(x− x1)+ (x3 − x1)(y− y1)√(x3 − x1)2 +(y3 − y1)2
= 0.
Show that if x = (1− t)x2 + tx3, y = (1− t)y2 + ty3 then Z lies on the line withequation
−(y2 − y1)(x− x1)+ (x2 − x1)(y− y1)√(x2 − x1)2 +(y2 − y1)2
+−(y3 − y1)(x− x1)+ (x3 − x1)(y− y1)√
(x3 − x1)2 +(y3 − y1)2= 0,
if and only
t =|Z1,Z2|2
|Z1,Z2|2 + |Z2,Z3|2.
Deduce that this latter line is the mid-line of |Z2Z1Z3.

Sec. 6.7 Coordinate treatment of harmonic ranges 101
6.4 If the fixed triangle [Z1,Z2,Z3] is isosceles, with |Z1,Z2| = |Z1,Z3|, and Z isa variable point on the side [Z2,Z3], show that the sum of the perpendiculardistances from Z to the lines Z1Z2 and Z1Z3 is constant.[Hint. Select a frame ofreference to simplify the calculations.]
6.5 Let [A,B,C,D] be a parallelogram, E = mp{C,D}, F = mp{A,B}, and let AEand CF meet BD at G and H , respectively. Prove that AE ‖ CF and |D,G| =|G,H|= |H,B|.

This page intentionally left blank

7
Circles; their basic properties
Hitherto our sets have involved lines and half-planes, and specific subsets of these.Now we introduce circles and study their relationships to lines. We do not do this justto admire the circles, and to behold their striking properties of symmetry. They arethe means by which we control angles, and simplify our work on them.
7.1 INTERSECTION OF A LINE AND ACIRCLE
7.1.1
Definition . If O is any point of the plane Π and k is any positive real number, we callthe set C (O;k) of all points X in Π which are at a distance k from O, i.e. C (O;k) ={X ∈ Π : |O,X|= k}, the circle with centre O and length of radius k. If X ∈C (O;k)the segment [O,X ] is called a radius of the circle. Any point U such that |O,U| < kis said to be an interior point for this circle. Any point V such that |O,V|> k is saidto be an exterior point for this circle.
For every circle C (O;k) and line l, one of the following holds:-
(i) l ∩C (O;k) = {P} for some point P, in which case every point of l \ {P} isexterior to the circle.
(ii) l∩C (O;k) = {P,Q} for some points P and Q, with P �= Q, in which case everypoint of [P,Q]\{P,Q} is interior to the circle, and every point of PQ\ [P,Q] isexterior to the circle.
(iii) l ∩C (O;k) = /0, in which case every point of l is exterior to the circle.
Proof . Let M = πl(O), and let m be the line which contains M and is perpendicularto l, so that O ∈ m.
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50007-0

104 Circles; their basic properties Ch. 7
�
�P = M
Ol
�
�
��
P
Q
OM
(i) Suppose that |O,M| = k, sothat M is a point of the circle.We write P=M. Then P∈ l, P∈C (O;k) and OP ⊥ l. Thus if V isany point of l, other than P, by4.3.1 we have |O,V| > |O,P| =k. Hence V is exterior to the cir-cle, and so there is no point com-mon to l and the circle except P.
�
� M
Ol
Figure 7.1.
(ii) Suppose that |O,M|< k, so that M is interior to the circle. Then k2−|O,M|2 >0 so that its square root can be extracted as a positive real number. By A4(iv) choose
P ∈ l so that |M,P|=√
k2 −|O,M|2. There is also a point Q ∈ l on the other side ofM from P and such that |M,Q|= |M,P|. Clearly M is the mid-point of P and Q.
When M = O, this gives |O,P|= k so that P ∈ C (O;k). By 2.1.3 any point X �= Pof the half-line [O,P must satisfy either X ∈ [O,P] or P ∈ [O,X ]. If X ∈ [O,P] thenby 3.1.2 |O,X| < |O,P| = k, so that X is interior to the circle. On the other handif P ∈ [O,X ] then |O,X| > |O,P| = k, and so X is an exterior point for the circle.Moreover Q is also on the circle and similar results hold when X ∈ [O,Q .
When M �= O, we have MP= l, MO= m, so that MP⊥ MO and then by Pythago-ras’ theorem
|O,P|2 = |O,M|2 + |M,P|2 = |O,M|2 +[k2 −|O,M|2] = k2;
thus again |O,P| = k, so that P is on the circle. By 2.1.3 any point X �= P of thehalf-line [M,P must satisfy either X ∈ [M,P] or P ∈ [M,X ]. If X ∈ [M,P], then by3.1.2 |M,X| < |M,P|; when X = M, clearly X an interior point; when X �= M, byPythagoras’ theorem this gives
|O,X|2 = |O,M|2 + |M,X|2 < |O,M|2 + |M,P|2 = k2,
so that |O,X| < k and so again X is interior to the circle. If on the other hand P ∈[M,X ], while still X �= P, then by 3.1.2 |M,X|> |M,P|; by Pythagoras’ theorem wehave
|O,X|2 = |O,M|2 + |M,X|2 > |O,M|2 + |M,P|2 = k2,
so that |O,X|> k and so X is exterior to the circle. Thus the points of [M,P]\{P} areinterior to the circle, and the points of ([M,P )\ [M,P] are exterior to the circle.

Sec. 7.2 Properties of circles 105
Similar results hold when X ∈ [M,Q , that is the points of [M,Q]\{Q} are interiorto the circle while the points of ([M,Q ) \ [M,Q] are exterior to the circle. But M ∈[P,Q] so that [P,M]∪ [M,Q] = [P,Q], [M,P ∪ [M,Q = PQ and so we can take theseresults together. Thus the points of [P,Q], other than P and Q, are interior to the circle,and the points of PQ\ [P,Q] are exterior to the circle, leaving just the points P and Qof the line l = PQ in the circle.
(iii) Suppose that |O,M| > k, so that M is exterior to the circle. Then M ∈ l andOM ⊥ l. If X ∈ l,X �= M, then by 4.3.1, |O,X| > |O,M|> k, so that X is exterior tothe circle.
Definition . If l is a line such that l∩C (O;k) = {P} for a point P, then l is called atangent to C (O;k) at P, and P is called the point of contact. If l∩C (O;k) = {P,Q}for distinct points P and Q, then l is called a secant for C (O;k) and the segment[P,Q] is called a chord of the circle; when O ∈ l = PQ, the chord [P,Q] is called adiameter of the circle; in that case O = mp(P,Q). If l ∩C (O;k) = /0, then l is calleda non-secant line for the circle.
NOTE. By the above every point of a tangent to a circle, other than the point ofcontact, is an exterior point. If [P,Q] is a chord, every point of the chord other thanits end-points P and Q is an interior point, while every point of PQ\ [P,Q] is exterior.Every point of a non-secant line is an exterior point.
7.2 PROPERTIES OF CIRCLES
7.2.1
Circles have the following properties:-
(i) If [Q,S] is a diameter of the circle C (O;k) and P any point of the circle otherthan Q and S, then PQ ⊥ PS.
(ii) If points P,Q,S are such that PQ ⊥ PS, then P is on a circle with diameter[Q,S].
(iii) If P is any point of the circle C (O;k), [Q,S] is any diameter and U = πQS(P),then U ∈ [Q,S] and |Q,U| ≤ 2k.
(iv) If Q is a point of a circle with centre O and l is the tangent to the circle at Q,then every point of the circle lies in the closed half-plane with edge l in whichO lies.

106 Circles; their basic properties Ch. 7
� � �
�
� �
� P
S QO
Figure 7.2.
� � �
�
� �
�
�
�
P
S QO
M
� � ��
� P
S QUO
Proof.(i) By 5.2.2
|∠OSP|◦+ |∠SPO|◦+ |∠POS|◦ = 180, |∠OQP|◦+ |∠QPO|◦+ |∠POQ|◦ = 180.
But by 4.1.1,|∠OSP|◦ = |∠SPO|◦, |∠OQP|◦ = |∠QPO|◦,
and so2|∠SPO|◦+2|∠QPO|◦+ |∠POS|◦+ |∠POQ|◦ = 360.
Now O ∈ [Q,S] so |∠POS|◦+ |∠POQ|◦ = 180, and as [P,O ⊂ I R(|QPS) we have|∠SPO|◦+ |∠OPQ|◦ = |∠QPS|◦. Thus |∠QPS|◦ = 90.
(ii) Let O be the mid-point of Q and S and through O draw the line parallel toPQ. It will meet [P,S] in a point M. Then by 5.3.1 M is the mid-point of P and S. ButPQ ⊥ PS and PQ ‖ MO so by 5.1.1 MO ⊥ PS. Then [O,P,M]≡ [O,S,M] by the SASprinciple of congruence. It follows that |O,P|= |O,S|.
(iii) If P �∈ QR, then by (i) of the present theorem and 4.3.3 U ∈ [Q,S]. If P ∈ QSthen U is either Q or S and so U ∈ [Q,S]. Then by 3.1.2 |Q,U| ≤ |Q,S|. But as O =mp(Q,S), by 3.2.1 |Q,O|= 1
2 |Q,S|, and so |Q,S|= 2k.(iv) Let [Q,S] be the diameter containing Q and H1 the closed half-plane with
edge l which contains O. Then by 2.2.3 every point of [Q,O lies in H1. If P is anypoint of the circle and U = πQO(P) then by (iii) above U ∈ [Q,S]⊂ [Q,O so U ∈H1.But l ⊥ QS, UP ⊥ QS so UP ‖ l. Then by 4.3.2 P ∈ H1.
7.2.2 Equation of a circle
Let Z0 ≡ (x0,y0) and k > 0. Then Z ≡ (x,y) is on C (Z0;k) if and only if
(x− x0)2 +(y− y0)
2 = k2.
Proof . This is immediate by the distance formula in 6.1.1.
7.2.3 Circle through three points
Given any three non-collinear points A, B and C, there is a unique circle which passesthrough them.
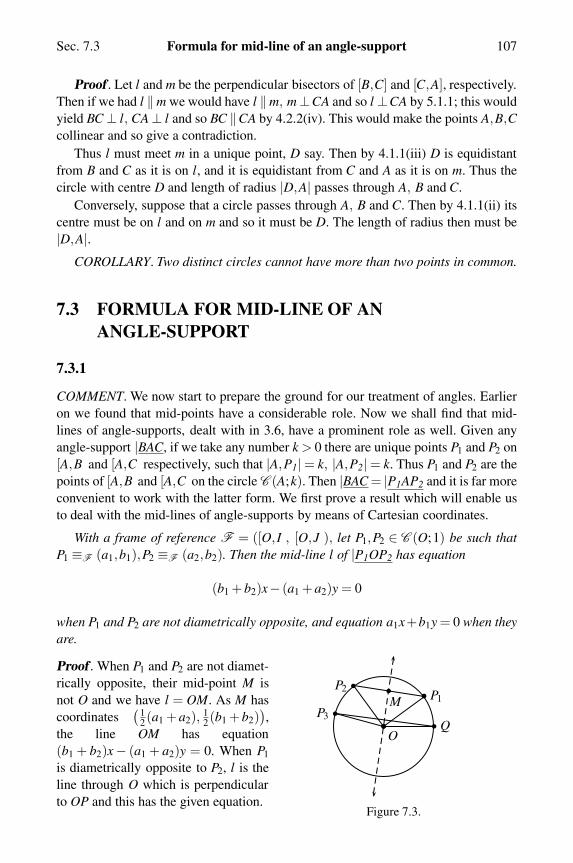
Sec. 7.3 Formula for mid-line of an angle-support 107
Proof . Let l and m be the perpendicular bisectors of [B,C] and [C,A], respectively.Then if we had l ‖ m we would have l ‖m, m ⊥CA and so l ⊥CA by 5.1.1; this wouldyield BC ⊥ l, CA ⊥ l and so BC ‖CA by 4.2.2(iv). This would make the points A,B,Ccollinear and so give a contradiction.
Thus l must meet m in a unique point, D say. Then by 4.1.1(iii) D is equidistantfrom B and C as it is on l, and it is equidistant from C and A as it is on m. Thus thecircle with centre D and length of radius |D,A| passes through A, B and C.
Conversely, suppose that a circle passes through A, B and C. Then by 4.1.1(ii) itscentre must be on l and on m and so it must be D. The length of radius then must be|D,A|.
COROLLARY. Two distinct circles cannot have more than two points in common.
7.3 FORMULA FOR MID-LINE OF ANANGLE-SUPPORT
7.3.1
COMMENT. We now start to prepare the ground for our treatment of angles. Earlieron we found that mid-points have a considerable role. Now we shall find that mid-lines of angle-supports, dealt with in 3.6, have a prominent role as well. Given anyangle-support |BAC, if we take any number k > 0 there are unique points P1 and P2 on[A,B and [A,C respectively, such that |A,P1|= k, |A,P2|= k. Thus P1 and P2 are thepoints of [A,B and [A,C on the circle C (A;k). Then |BAC = |P1AP2 and it is far moreconvenient to work with the latter form. We first prove a result which will enable usto deal with the mid-lines of angle-supports by means of Cartesian coordinates.
With a frame of reference F = ([O, I , [O,J ), let P1,P2 ∈ C (O;1) be such thatP1 ≡F (a1,b1),P2 ≡F (a2,b2). Then the mid-line l of |P1OP2 has equation
(b1 +b2)x− (a1 +a2)y = 0
when P1 and P2 are not diametrically opposite, and equation a1x+b1y = 0 when theyare.
Proof . When P1 and P2 are not diamet-rically opposite, their mid-point M isnot O and we have l = OM. As M hascoordinates
(12(a1 +a2),
12(b1 +b2)
),
the line OM has equation(b1 + b2)x− (a1 + a2)y = 0. When P1
is diametrically opposite to P2, l is theline through O which is perpendicularto OP and this has the given equation.
�
�
�
�
�
�
��
�
P1P2
P3M
OQ
Figure 7.3.

108 Circles; their basic properties Ch. 7
With the notation of the last result, let Q ≡F (1,0) and sl(Q) = P3 where P3 ≡F
(a3,b3). Then
a3 =(a1 +a2)
2 − (b1 +b2)2
(a1 +a2)2 +(b1 +b2)2 , b3 =2(a1 +a2)(b1 +b2)
(a1 +a2)2 +(b1 +b2)2 ,
when P1 and P2 are not diametrically opposite, and
a3 = b21 −a2
1, b3 =−2a1b1,
when they are.Proof . For l ≡ ax+by+ c = 0, we recall from 6.6.1 that
sl(Z0)
≡(
x0 − 2aa2 +b2 (ax0 +by0 + c),y0 − 2b
a2 +b2 (ax0 +by0 + c)
).
When P1 and P2 are not diametrically opposite, l ≡ (b1 +b2)x− (a1 +a2)y = 0. Thusfor it x0 = 1, y0 = 0, a = b1 +b2, b =−(a1 +a2), c = 0 and so
a3 =(a1 +a2)
2 − (b1 +b2)2
(a1 +a2)2 +(b1 +b2)2 , b3 =2(a1 +a2)(b1 +b2)
(a1 +a2)2 +(b1 +b2)2 .
When P1 and P2 are diametrically opposite, l ≡ a1x+ b1y = 0. Thus for it x0 =1, y0 = 0, a = a1, b = b1, c = 0, so we have
a3 = b21 −a2
1, b3 =−2a1b1,
as a21 +b2
1 = 1.
7.4 POLAR PROPERTIES OF A CIRCLE
7.4.1 Tangents from an exterior point
Let P be a point exterior to a circle C . Then two tangents to the circle pass throughP. Their points of contact are equidistant from P.Proof . Let the circle have cen-tre O and length of radius a. Let|O,P|= b, so that b > a. Choosethe point U ∈ [O,P so that x =|O,U| = a2/b. As b > a, thenx < a < b so U ∈ [O,P]. Erecta perpendicular to OP at U andmark off on it a distance
y = |U,T1|= a
√1−
(ab
)2.
� � � ��
�
�
�
�
�
�O PU V
T1
T2
Figure 7.4.

Sec. 7.4 Polar properties of a circle 109
By Pythagoras’ theorem,
|O,T1|2 = |O,U|2 + |U,T1|2 = x2 + y2 =a4
b2 +a2 − a4
b2 = a2,
so that T1 ∈ C .Let V be the mid-point of O and P, so that V ∈ [O,P] and |O,V|= b
2 . Then
|U,V|=±(|O,V|− |O,U|) =±(12b− x).
Again by Pythagoras’ theorem,
|V,T1|2 = |U,V|2 + |U,T1|2 = (12 b− x)2 + y2
=
(12b− a2
b
)2
+a2(
1− a2
b2
)= 1
4b2.
Thus T1 is on the circle C1 with centre V and radius length 12b. Note that C1 also
passes through O and P. Then ∠OT1P is an angle in a semi-circle of C1, so that by7.2.1 it is a right-angle. Thus by 7.1.1 PT1 is a tangent to C at T1.
By a similar argument, if we take T2 so that U is the mid-point of T1 and T2, thenPT2 is also a tangent to C at T2. We note that T1 and T2 are both on the line which isperpendicular to OP at the point U .
By Pythagoras’ theorem
|P,T1|2 = |O,P|2 −|O,T1|2 = |O,P|2 −|O,T2|2 = |P,T2|2,
and so |P,T1|= |P,T2|.There cannot be a third tangent PT3 as then T3 would be on C and C1, whereas by
7.2.3 these circles have only two points in common.
7.4.2 The power property of a circle
For a fixed circle C (O;k) and fixed point P �∈ C (O;k), let a variable line l through Pmeet C (O;k) at R and S. Then the product of distances |P,R||P,S| is constant. WhenP is exterior to the circle,
|P,R||P,S|= |P,T1|2,where T1 is the point of contact of a tangent from P to the circle.
Proof . By the distance formula Z ≡ (x,y) is on C (O;k) if and only if x2 + y2 −k2 = 0. If P ≡ (x0,y0) and l has Cartesian equation ax+ by+ c = 0, by 6.4.1 pointsZ on l have parametric equations of the form x = x0 +bt, y = y0 −at (t ∈ R). Now lalso has Cartesian equation
a√a2 +b2
x+b√
a2 +b2y+
c√a2 +b2
= 0.

110 Circles; their basic properties Ch. 7
Thus as we we may replace a and b by a/√
a2 +b2 and b/√
a2 +b2, without loss ofgenerality we may assume that a2 + b2 = 1. Then the point Z on the line lies on thecircle if (x0 +bt)2 +(y0 −at)2 − k2 = 0, that is if
t2 +2(bx0 −ay0)t + x20 + y2
0 − k2 = 0.
If t1, t2 are the roots of this equation, then t1t2 = x20 + y2
0 − k2. As for R and S we have
x1 = x0 +bt1, y1 = y0 −at1, x2 = x0 +bt2, y2 = y0 −at2,
so |P,R|= |t1|, |P,S|= |t2|. Thus
|P,R||P,S|= |t1t2|= |x20 + y2
0 − k2|,which is constant.
When P is exterior to the circle, the roots of the quadratic equation are equal if
(bx0 −ay0)2 = x2
0 + y20 − k2,
and the repeated root is given by t = −(bx0 − ay0). Then for a point of intersectionT1 of the line and circle, we have for the coordinates of T1
x = x0 − (bx0 −ay0)b, y = y0 +(bx0 −ay0)a.
Hence
|P,T1|2 = (x− x0)2 +(y− y0)
2 = (bx0 −ay0)2 = x2
0 + y20 − k2 = |O,P|2 − k2.
It is also easy to give a synthetic proof as follows. We first take P interior to thecircle. Let M be the mid-point of R and S so that M is the foot of the perpendicularfrom O to RS. Then P is in either [R,M] or [M,S]; we suppose that P ∈ [R,M].
�
�
���
�
S
R
M
P
O
Figure 7.5.
� ��
�
��
�
�
�
�
�
�
�
�
�
OPR
T1
M
S
Then
|P,R||P,S|= (|M,R|− |P,M|) (|M,S|+ |P,M|) = |M,R|2 −|P,M|2
= |M,R|2 −(|P,O|2 −|O,M|2
)=(|M,R|2 + |O,M|2
)−|P,O|2
= |O,R|2 −|P,O|2 = k2 −|P,O|2,

Sec. 7.4 Polar properties of a circle 111
and this is fixed.We continue with the case where P is exterior to the circle, and may suppose that
|P,R|< |P,S|, as otherwise we can just interchange the points R and S. As P is outsidethe circle, by 7.1.1 it is outside the segment [R,S] on the line RS. Then we have
|P,R||P,S|= (|P,M|− |M,R|) (|P,M|+ |M,S|) = |P,M|2 −|M,R|2
=(|P,O|2 −|O,M|2
)−|M,R|2 = |P,O|2 −
(|O,M|2 + |M,R|2
)= |P,O|2 −|O,R|2 = |P,O|2 −|O,T1|2 = |P,T1|2.
7.4.3 A harmonic range
Let T1 and T2 be the points of contact of the tangents from an exterior point P to acircle C with centre O. If a line l through P cuts C in the points R and S, and cutsT1T2 in Q, then P and Q divide {R,S} internally and externally in the same ratio.Proof . We use the notation of7.4.1 and first recall that T1T2
cuts OP at right-angles at a pointU . Then, by 7.2.1(ii), the circleC2 on [O,Q] as a diameter passesthrough U . We let M be the mid-point of R and S; then by 4.1.1OM ⊥ MQ, and so M also lieson the circle C2.
� � ��
�
��
�
�
��
�
�
�
�
�
�
�
�
OP
UR
T1
T2
Q
MS
Figure 7.6.
We have |P,R||P,S| = |P,T1|2 by 7.4.2, |P,T1|2 = |P,U||P,O| by the proof ofPythagoras’ theorem in 5.4.1, and |P,U||P,O|= |P,Q||P,M|, by the 7.4.2 applied tothe circle C2. On combining these we have |P,R||P,S|= |P,Q||P,M|.
We cannot have l ⊥ OP as that would make l ‖ T1T2 whereas l meets T1T2. Then,with the notation of 7.4.1, l is not a tangent to C1 at P so, by 7.1.1 l must meet C1 at apoint H . We are supposing that l is not either of PT1, PT2 and so H is not T1 or T2. Welet K be the foot of the perpendicular from H to OP. Then by 4.3.3 K ∈ [P,O] and bythe proof of Pythagoras’ theorem in 5.4.1 |P,H|2 = |P,K||P,O|. If we had K ∈ [P,U ]we would have |P,K|< |P,U| and so
|P,H|2 = |P,O||P,K|< |P,O||P,U|= |P,T1|2.From this it would follow that
|O,H|2 = |O,P|2 −|P,H|2 > |O,P|2 −|P,T1|2 = a2,
and make H exterior to the circle. But H is the foot of the perpendicular from O tol, and by 7.1.1 this would cause l to have no point in common with the circle. Thiscannot occur and so we must have K ∈ [O,U ]. By a similar argument it then followsthat H is interior to the circle C and so l meets C in two points R and S.
By 7.2.1(iv) every point of the circle C is in the closed half-plane H1 with edgePT1 and which contains O. By 2.2.3 H1 contains U ∈ [P,O and then it also contains

112 Circles; their basic properties Ch. 7
T2 ∈ [T1,U . Similarly every point of C is also in the closed half-plane with edgePT2 and which contains T1. It follows that every point of C lies in the interior regionI R(|T1PT2). Now every point of [P,R is in this interior region and so Q is. It followsthat Q ∈ [T1,T2] and so by 7.1.1 is interior to the circle; we thus must have Q ∈ [R,S]by 7.1.1 again.
We let x = |P,R|, y = |P,S|, z = |P,Q|, and without loss of generality assume|P,R|< |P,S| so that x < y. As P is outside the circle it is outside the segment [R,S];as Q is on the segment [R,S], it follows that 0 < x < z < y. Then in turn
xy =12(x+ y)z,
2z=
1x+
1y,
1x− 1
z=
1z− 1
y,
z− xxz
=y− z
zy,
xz− x
=y
y− z,
|P,R||R,Q| =
|P,S||S,Q| .
In the above we have assumed that l is not the line OP. When it is we have asimple case; l cuts the circle in points R1,S1 such that [R1,S1] is a diameter. Thentaking |P,R1|< |P,S1|, with the notation of 7.4.1 we have that
|S1,P||P,R1| =
b+ab−a
,|S1,U||U,R1| =
a+a2/ba−a2/b
,
and these are equal.
7.5 ANGLES STANDING ON ARCS OF CIRCLES
7.5.1
Let P,Q,R,S be points of a circle C (O;k) such that R and S are on one side of theline PQ. Then |∠PRQ|◦ = |∠PSQ|◦.
(i)When O ∈ PQ, |∠PRQ|◦ = 90.(ii)When O �∈ PQ and R is on the same side of PQ as O is, then |∠PRQ|◦ =
12 |∠POQ|◦.
(iii) When O �∈ PQ and R is on the opposite side of PQ from O, then |∠PRQ|◦ isequal to half of the degree-measure of the reflex-angle with support |POQ.
Proof . We are given that R �∈ PQ,S �∈ PQ. Now S �∈ QR as by 7.1.1 a line cannotmeet the circle in more than two points; for this reason also S �∈ RP. Thus S cannot beon a side-line of the triangle [P,Q,R]. Moreover, neither can S be in [P,Q,R] but noton a side, as then by the cross-bar theorem we would have S ∈ [P,V ] for some pointV in [Q,R] but not at an end-point. Then V would be interior to the circle and P is onthe circle, so by 7.1.1 every point of [P,V ], other than P, is interior to the circle; thiswould make S interior to the circle whereas it is on it.
Thus as S �∈ [P,Q,R] we must have at least one of the following :-
(a) S is on the opposite side of QR from P,(b) S is on the opposite side of RP from Q,(c) S is on the opposite side of PQ from R,

Sec. 7.5 Angles standing on arcs of circles 113
and of course (c) is ruled out by assumption.
�
�
�
�
�
�
�
�
�
�
�
SR
P
OQ
U
�
�
� �
�
�
�
�
P Q
R
O
V
�
�
� �
�
�
�
�
�
P Q
R
O
W
V
Figure 7.7.
� �
�
�
�
�
Q
P R
S
We suppose that (a) holds as in the first figure; the case of (b) is treated similarly.Then there is a point U ∈ [P,S]∩QR. As U ∈ [P,S], U must be an interior point forthe circle and hence we must have U ∈ [Q,R]. By 7.4.2
|U,P||U,Q| =
|U,R||U,S| ,
and we also have |∠PUR|◦ = |∠QUS|◦ as these are opposite angles. By 5.3.2, thetriangles [U,P,R], [U,Q,S] are similar. In particular |∠PRU|◦ = |∠QSU|◦. The firstdiagram in Fig. 7.7 deals with this general case.
In (i) when O ∈ PQ, that we have a right-angle comes from 7.2.1 and there is adiagram for this in Fig. 7.2.
When O �∈PQ we let V be the mid-point of {P,Q} and for the second case (ii), as inthe second diagram in Fig. 7.7, we take R to be point in which [V,O meets the circle.Then by 5.2.2, Corollary, and 4.1.1(i) |∠VOP|◦ = 2|∠VRP|◦, |∠VOQ|◦ = 2|∠VRQ|◦.But [R,V ⊂ I R(|PRQ) so that |∠VRP|◦+ |∠VRQ|◦ = |∠PRQ|◦. Moreover [O,V ⊂I R(|POQ) so that |∠VOP|◦+ |∠VOQ|◦= |∠POQ|◦. By addition we then have that |∠POQ|◦ = 2|∠PRQ|◦.
For the third case (iii), as in the third diagram in Fig. 7.7, we take R to be pointin which [O,V meets the circle and W �= O a point such that O ∈ [V,W ]. Then by5.2.2, Corollary, and 4.1.1(i) |∠WOP|◦ = 2|∠WRP|◦, |∠WOQ|◦ = 2|∠WRQ|◦. But[R,W ⊂ I R(|PRQ) so that |∠WRP|◦+ |∠WRQ|◦ = |∠PRQ|◦. Moreover [O,V ⊂I R(|POQ) so that by 3.7.1 |∠WOP|◦+ |∠WOQ|◦ is equal to the degree-measure

114 Circles; their basic properties Ch. 7
of the reflex- angle with support |∠POQ. By addition we then have that the degree-measure of this reflex-angle is equal to 2|∠PRQ|◦.
Definition . If the vertices of a convex quadrilateral all lie on some circle, then thequadrilateral is said to be cyclic.
COROLLARY. Let [P,Q,R,S] be a convex cyclic quadrilateral. Then the sum ofthe degree-measures of a pair of opposite angles is 180.
Proof . Using the fourth diagram in Fig. 7.7, we first we note that
|∠RPQ|◦+ |∠PQR|◦+ |∠QRP|◦ = 180.
Next as [S,Q ⊂ I R(|PSR), we have |∠PSR|◦ = |∠PSQ|◦+ |∠QSR|◦. But|∠PSQ|◦ = |∠QRP|◦, |∠QSR|◦ = |∠RPQ|◦. Hence
|∠PSR|◦+ |∠PQR|◦ = |∠RPQ|◦+ |∠PQR|◦+ |∠QRP|◦ = 180.
7.5.2 Minor and major arcs of a circle
Definition . Let P1,P2 ∈ C (O;k)be distinct points such thatO �∈ P1P2. Let H5,H6 be theclosed half-planes with edgeP1P2, with O ∈ H5. ThenC (O;k) ∩ H5, C (O;k) ∩ H6,are called, respectively, the ma-jor and minor arcs of C (O;k)with end-points P1 and P2.
�
��
�
�
O
P1P2W
P
H5
H6
Figure 7.8.
The point P ∈ C (O;k) is in the minor arc with end-points P1,P2 if and only if[O,P]∩ [P1,P2] �= /0.
Proof . Let P be in the minor arc. Then O ∈ H5,P ∈ H6 so [O,P] meets P1P2 insome point W . As W ∈ [O,P] we have |O,W| ≤ k so by 7.1.1 W ∈ [P1,P2].
Conversely suppose that W ∈ [P1,P2] so that |O,W| ≤ k. Choose P ∈ [O,W so that|O,P| = k. Then as |O,W| ≤ |O,P| we have W ∈ [O,P] so that as O ∈ H5 we haveP ∈ H6.
7.6 SENSED DISTANCES
7.6.1 Sensed distance
Definition . If l is a line, ≤l is a natural order on l and Z1, Z2 ∈ l, then we defineZ1Z2≤l
by
Z1Z2≤l=
{ |Z1,Z2|, if Z1 ≤l Z2,−|Z1,Z2|, if Z2 ≤l Z1,
and call this the sensed distance from Z1 to Z2. In knowing this rather than justthe distance from Z1 to Z2 we have extra information which can be turned to good

Sec. 7.6 Sensed distances 115
account. It can have negative as well as positive and zero values and it is related tothe distance as Z1Z2≤l
=±|Z1,Z2| or equivalently |Z1Z2≤l|= |Z1,Z2|.
We note immediately the properties:
Z1Z1≤l= 0, (7.6.1)
Z2Z1≤l=−Z1Z2≤l
, (7.6.2)
in all cases. We can add sensed distances on a line and have the striking property that
Z1Z2≤l+Z2Z3≤l
= Z1Z3≤l, (7.6.3)
for all Z1, Z2, Z3 ∈ l.This is easily seen to hold by (7.6.1) when any two of the three points coincide, as
e.g. when Z1 = Z2 it amounts to 0+Z1Z3≤l= Z1Z3≤l
. Suppose then that Z1, Z2, Z3
are all distinct and suppose first that Z1 ≤l Z2. Then by 2.1.3 we have one of the cases
(a) Z3 ≤l Z1 ≤l Z2, (b) Z1 ≤l Z3 ≤l Z2, (c) Z1 ≤l Z2 ≤l Z3.
In (a) we have
Z1Z2≤l= |Z1,Z2|, Z2Z3≤l
=−|Z2,Z3|, Z1Z3≤l=−|Z1,Z3|,
and as Z1 ∈ [Z3,Z2], |Z3,Z1|+ |Z1,Z2|= |Z3,Z2|, which is−Z1Z3≤l
+Z1Z2≤l=−Z2Z3≤l
.In (b) we have
Z1Z2≤l= |Z1,Z2|, Z2Z3≤l
=−|Z2,Z3|, Z1Z3≤l= |Z1,Z3|,
and as Z3 ∈ [Z1,Z2], |Z1,Z3|+ |Z3,Z2|= |Z1,Z2|, which is Z1Z3≤l−Z2Z3≤l
= Z1Z2≤l .In (c) we have
Z1Z2≤l= |Z1,Z2|, Z2Z3≤l
= |Z2,Z3|, Z1Z3≤l= |Z1,Z3|,
and as Z2 ∈ [Z1,Z3], |Z1,Z2|+ |Z2,Z3|= |Z1,Z3|, which is Z1Z2≤l+Z2Z3≤l
= Z1Z3≤l.
Next suppose that Z2 ≤l Z1. Then on interchanging Z1 and Z2 in the cases justproved we have Z2Z1≤l
+ Z1Z3≤l= Z2Z3≤l
, for all Z3 ∈ l and by (7.6.2) this gives−Z1Z2≤l
+ Z1Z3≤l= Z2Z3≤l
. This completes the proof of (7.6.3) which shows thataddition of sensed distances on a line is much simpler than addition of distances.
We next relate sensed distances to the parametric equations of l noted in6.4.1,Corollary. Suppose that W0 ≡ (u0,v0), W1 ≡ (u1,v1) are distinct points on l andthat W0 ≤l W1. Then for points Z1 ≡ (x1,y1), Z2 ≡ (x2,y2) on l we have
x1 = u0 + s1(u1 −u0), y1 = v0 + s1(v1 − v0),
x2 = u0 + s2(u1 −u0), y2 = v0 + s2(v1 − v0),
and we recall that Z1 ≤l Z2 if and only if s1 ≤ s2. Moreover, by the distance formula
|Z1,Z2|= |s2 − s1||W0,W1|.

116 Circles; their basic properties Ch. 7
From these we conclude that
Z1Z2≤l= (s2 − s1)|W0,W1|. (7.6.4)
In particular the simplest case of parametric representation in relation to sensed dis-tances is when we additionally take |W0,W1|= 1 as we then have Z1Z2≤l = s2 − s1.
When we consider the reciprocal natural order on l we note that
Z1Z2≥l=−Z1Z2≤l
,
so that changing to the reciprocal natural order multiplies the value by −1. As wellas adding sensed distances on one line we can multiply or divide them. Now forZ1, Z2, Z3, Z4 in l,
Z3Z4≥lZ1Z2≥l
=−Z3Z4≤l(−1)Z1Z2≤l
= Z3Z4≤lZ1Z2≤l
,
so this sensed product is independent of which natural order is taken. Similarly,when Z1 �= Z2, we can take a ratio of sensed distances
Z3Z4≤l
Z1Z2≤l
=−Z3Z4≥l
−Z1Z2≥l
=Z3Z4≥l
Z1Z2≥l
=s4 − s3
s2 − s1,
and see that this sensed ratio is independent of whichever of ≤l, ≥l is used. Whenthe line l is understood, we can relax our notation to Z3Z4 Z1Z2 and Z3Z4
Z1Z2for these
products and ratios.If for Z1,Z2,Z ∈ l we take the parametric equations
x = x1 + t(x2 − x1), y = y1 + t(y2 − y1), (t ∈ R),
then we have that
x = u0 +[s1 + t(s2 − s1)](u1 −u0), y = v0 +[s1 + t(s2 − s1)](v1 − v0),
and by (7.6.4) we have that
Z1Z≤l = t(s2 − s1)|W0,W1|, ZZ2≤l = (1− t)(s2 − s1)|W0,W1|,
and soZ1Z
ZZ2=
t1− t
. (7.6.5)
Our main utilisation of these concepts is through sensed ratios; for example(Z1,Z2,Z3,Z4) is a harmonic range when Z1Z3/Z3Z2 =−Z1Z4/Z4Z2. It is convenientto defer the details until Chapter 11. However we make one use of sensed products inthe next subsection.

Sec. 7.6 Sensed distances 117
7.6.2 Sensed products and a circle
The conclusion of 7.4.2 can be strengthened to replace |P,R||P,S| by PRPS. In factthe initial analytic proof gives this but it also easily follows from the stated result asPRPS =−|P,R||P,S| when P is interior to the circle while PRPS = |P,R||P,S| whenP is exterior to the circle. We now look to a converse type of result.
Suppose that Z1,Z2 and Z3 are fixed non-collinear points. For a variable point Wlet Z1W meet Z2Z3 at W ′ and
W ′W W ′Z1 =W ′Z2W ′Z3.
Then W lies on the circle which passes through Z1,Z2 and Z3.
Proof. Without loss of generalitywe may take our frame of refer-ence so that Z1 ≡ (0,y1), Z2 ≡(x2,0), Z3 ≡ (x3,0), and wetake W ≡ (u,v), W ′ ≡ (u′,0).
� � �
�
�
�
Z1
Z2 Z3
W ′
WFigure 7.9.
Then it is easily found that u′ = y1u/(y1 − v), and so, first of all,
W ′Z2W ′Z3 =
(x2 − y1u
y1 − v
)(x3 − y1u
y1 − v
).
The line W ′W has parametric equations x = u′+s(u−u′), y= 0+s(v−0), with s = 0giving W ′ and s = 1 giving W . Thus W ′W = |W ′,W|. The point Z1 has parametergiven by y1 = sv and so s = y1/v; then W ′Z1 =
y1v |W ′,W|. It follows that
W ′W W ′Z1 =y1
v|W ′,W|2 = y1
v
[(u− y1u
y1 − v
)2
+ v2
]
= y1v
[(u
y1 − v
)2
+1
].
On equating the two expressions we have(x2 − y1u
y1 − v
)(x3 − y1u
y1 − v
)= y1v
[(u
y1 − v
)2
+1
],
which we re-write as
y1u2(y1 − v)(y1 − v)2 = y1v− x2x3 +
y1(x2 + x3)uy1 − v
.
On multiplying across by y1 − v we obtain
y1(u2 + v2)− y1(x2 + x3)u− (y2
1 + x2x3)v+ y1x2x3 = 0,
and this is the equation of a circle.

118 Circles; their basic properties Ch. 7
7.6.3 Radical axis and coaxal circles
In 7.4.2 our proof showed that if a line through the point Z meets the circle C (Z1,k1)at the points R and S then ZRZS = |Z1,Z|2 − k2
1 depends only on the circle and thepoint Z. We call this expression the power of the point Z with respect to this circle.To cater for degenerate cases, when k1 = 0 we also call |Z1,Z|2 the power of Z withrespect to the point Z1.
We let C1 denote either C (Z1,k1) or Z1 and similarly consider C2 which is eitherC (Z2,k2) or Z2. We ask for what points Z its powers with respect to C1 and C2 areequal. This occurs when |Z1,Z|2 − k2
1 = |Z2,Z|2 − k22 which simplifies to
2(x2 − x1)x+2(y2 − y1)y+ x21 + y2
1 − k21 + x2
2 + y22 − k2
2 = 0.
If Z1 �= Z2 this is the equation of a line which is called the radical axis of C1 and C2.It is always perpendicular to the line Z1Z2 and it passes through any points which C1
and C2 have in common.More generally we also ask for what points Z its powers with respect to C1 and
C2 have a constant ratio. For a real number λ which is not equal to 1 we considerwhen
|Z1,Z|2 − k21 = λ
[|Z2,Z|2 − k2
2
]. (7.6.6)
When λ = 0 this yields C1 and by considering μ[|Z1,Z|2 − k2
1
]= |Z2,Z|2 − k2
2 as
well, we also include C2.Now (7.6.6) expands to
x2 + y2 −2x1 −λx2
1−λx−2
y1 −λy2
1−λy+
x21 + y2
1 − k21 −λ (x2
2 + y22 − k2
2)
1−λ= 0,
and on completing the squares in both x and y it becomes[x− x1 −λx2
1−λ
]2
+
[y− y1 −λy2
1−λ
]2
=1
(1−λ )2
{k2
1 +[(x1 − x2)
2 +(y1 − y2)2 − k2
1 − k22
]λ + k2
2λ 2} .This quadratic expression in λ is postive when |λ | is large, so it has either a positiveminimum, or its minimum is 0 attained at λ1, say, or it has a negative minimum andso has the value 0 at λ2 and λ3, say, where λ2 < λ3. In the first of these cases (7.6.6)always represents a circle and in the second case it represents a circle for all λ �= λ1
and a point for λ = λ1. In the third case it represents a circle when either λ < λ2 orλ > λ3, it represents a point when either λ = λ2 or λ = λ3, and it represents an emptylocus when λ2 < λ < λ3. Thus it is the equation of a circle, a point or an empty locus.
Suppose that we consider two of these loci, corresponding to the values λ4 and λ5
of λ . They will then have equations
x2 + y2 −2x1 −λ4x2
1−λ4x−2
y1 −λ4y2
1−λ4y+
x21 + y2
1 − k21 −λ4(x2
2 + y22 − k2
2)
1−λ4= 0,
x2 + y2 −2x1 −λ5x2
1−λ5x−2
y1 −λ5y2
1−λ5y+
x21 + y2
1 − k21 −λ5(x2
2 + y22 − k2
2)
1−λ5= 0.

Sec. 7.6 Sensed distances 119
On subtracting the second of these from the first, and simplifying, we find that theirradical axis is the line with equation
λ4 −λ5
(1−λ4)(1−λ5)
[2(x2 − x1)x+2(y2 − y1)y+ x2
1 + y21 − k2
1 + x22 + y2
2 − k22
]=0.
As we can cancel the initial fraction we see that these loci have the same radical axisas did the original pair C1 and C2. For this reason all the loci considered are said tobe coaxal.
Exercises
7.1 Prove that a circle cannot have more than one centre. [Hint. If O and O1 areboth centres, consider the intersection of OO1 with the circle.]
7.2 Give an alternative proof of 7.2.1(iv) by showing that if (x− k)2 + y2 = k2,where k > 0, then x ≥ 0.
7.3 Prove that if the point X is interior to the circle (O;k), l is a line containing X ,and M = πl(X), then M is also an interior point of this circle. Deduce that l isa secant line. Show too that if Y is also interior to this circle, then every pointof the segment [X ,Y ] is also interior.
7.4 Show that if A,B,C are non-collinear points, there is a unique circle to whichthe side-lines BC,CA,AB are all tangents.
7.5 Let Z1 ≡ (x1,0),Z2 ≡ (x2,0) and Z3 ≡ (x3,0) be distinct fixed collinear pointsand Z3 not the mid-point of Z1 and Z2. For W �∈ Z1Z2 let l be the mid-line of|Z2WZ1. Find the locus of W such that either l, or the line through W perpen-dicular to l, passes through Z3.
7.6 Show that the locus of mid-points of chords of a circle on parallel lines is adiameter.
7.7 Show that if two tangents to a circle are parallel, then their points of contactare at the end-points of a diameter.
7.8 Show that if each of the side-lines of a rectangle is a tangent to a given circle,then it must be a square.
7.9 Consider the circle C (O;a) and point Z1 ≡ (x1,0) where x1 > a > 0, so that Z1
is an exterior point which lies on the diametral line AB, where A ≡ (a,0),B ≡(−a,0). Show that for all points Z ≡ (x,y) on the circle,
|Z1,A| ≤ |Z1,Z| ≤ |Z1,B|.

120 Circles; their basic properties Ch. 7
7.10 For 0< a< b, suppose that A≡ (0,a), B≡ (0,b). Show that the circles C (A;a)and C (B;b) both have the axis OI as a tangent at the point O, and that A ∈[O,B]. Verify that every point of C (A;a), other than O, is an interior point forC (B;b). [Hint. Consider the equations of C (A;a) and C (B;b).]
7.11 Use Ex.6.3 to establish the equation of the mid-line l in 7.3.1 when P1 and P2
are not diametrically opposite.

8
Translations; axial symmetries;isometries
COMMENT. In this chapter we introduce translations and develop them and axialsymmetries. These will be useful in later chapters. It is more convenient to frame ourproofs for isometries generally.
8.1 TRANSLATIONS AND AXIAL SYMMETRIES
8.1.1
Definition . Given pointsZ1,Z2 ∈ Π, we define a trans-lation tZ1,Z2 to be a functiontZ1,Z2 : Π → Π such that, forall Z ∈ Π, tZ1,Z2(Z) = W wheremp(Z1,W ) = mp(Z2,Z).
�
�
�
�
Z1
Z2 W
Z
T�
Figure 8.1.
Translations have the following properties:-
(i) If Z1 ≡ (x1,y1) Z2 ≡ (x2,y2) Z ≡ (x,y), W ≡ (u,v), then tZ1,Z2(Z) = W if andonly if
u = x+ x2 − x1, v = y+ y2 − y1.
(ii) In all cases |tZ1,Z2(Z3), tZ1,Z2(Z4)|= |Z3,Z4|, so that each translation preservesall distances.
(iii) For each W ∈ Π the equation tZ1,Z2(Z) = W has a solution in Z, so that eachtranslation is an onto function.
(iv) Each translation tZ1,Z2 has an inverse function t−1Z1,Z2
= tZ2,Z1 .
(v) The translation tZ1,Z1 is the identity function on Π.
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50008-2

122 Translations; axial symmetries; isometries Ch. 8
(vi) If Z1 �= Z2, Z �∈ Z1Z2 and W = tZ1,Z2(Z), then [Z1,Z2,W,Z] is a parallelogram.
Proof .(i) For
mp(Z1,W )≡(
12(x1 +u),
12(y1 + v)
), mp(Z2,Z)≡
(12(x2 + x),
12(y2 + y)
)
and these are equal if and only if u = x+ x2 − x1, v = y+ y2 − y1.(ii) For if W3 = tZ1,Z2(Z3), W4 = tZ1,Z2(Z4), then
u4 −u3 = x4 + x2 − x1 − (x3 + x2 − x1) = x4 − x3,
v4 − v3 = y4 + y2 − y1 − (y3 + y2 − y1) = y4 − y3.
It follows that |Z3,Z4|= |W3,W4|.(iii) By (i) the equation tZ1,Z2(Z)=W has the solution given by x= u+x1−x2, y=
v+ y1 − y2.(iv) By (ii) and (iii) the equation tZ1,Z2(Z) = W has a unique solution and this is
denoted by Z = t−1Z1,Z2
(W ). The correspondence from Π to Π given by W → Z is theinverse of tZ1,Z2 and is a function. As by the proof of (iii)
x = u+ x1 − x2, y = v+ y1 − y2,
by (i) this inverse function is tZ2,Z1 .(v) For if Z1 = Z2, in (i) we have u = x+ x1 − x1 = x, v = y+ y1 − y1 = y.(vi) We denote by T the common mid-point mp(Z1,W ) = mp(Z2,Z). First we note
that W �= Z, as mp(Z1,Z) =mp(Z2,Z) would imply Z1 = Z2. As Z �∈ Z1Z2, we haveT �∈ Z1Z2 and hence W �∈ Z1Z2. It follows that T �∈ ZW as otherwise we would haveZ1 ∈ ZW, Z2 ∈ ZW and so Z ∈ Z1Z2. The triangles [Z1,T,Z2], [W,T,Z] are congru-ent in the correspondence (Z1,T,Z2) → (W,T,Z) by the SAS-principle. Hence thealternate angles ∠WZ1Z2, ∠Z1WZ have equal degree-measures and so Z1Z2 ‖ WZ.Similarly Z1Z ‖ Z2W .
Axial symmetries have the following properties:-
(i) In all cases |sl(Z3),sl(Z4)|= |Z3,Z4|, so that each axial symmetry preserves alldistances.
(ii) Each axial symmetry sl has an inverse function s−1l = sl .
Proof .(i) We note that by 6.6.1,
sl(Z3)
≡(
1a2 +b2 [(b
2 −a2)x3 −2aby3 −2ac],1
a2 +b2 [−2abx3 − (b2 −a2)y3 −2bc]
),
sl(Z4)
≡(
1a2 +b2 [(b
2 −a2)x4 −2aby4 −2ac],1
a2 +b2 [−2abx4 − (b2 −a2)y4 −2bc]
),

Sec. 8.2 Isometries 123
and thus
|sl(Z3),sl(Z4)|2 = 1(a2 +b2)2
{[(b2 −a2)(x3 − x4)−2ab(y3 − y4)]
2
+[−2ab(x3 − x4)− (b2 −a2)(y3 − y4)]2}
=1
(a2 +b2)2
{[(b2 −a2)2 +4a2b2][(x3 − x4)
2 +(y3 − y4)2]
+[−4ab+4ab](b2 −a2)(x3 − x4)(y3 − y4)}
= (x3 − x4)2 +(y3 − y4)
2.
(ii) For if m is the line through Z which is perpendicular to l and W = sl(Z), thenW ∈ m and so πl(W ) = πl(Z). Then πl(W ) = mp(W,Z) so Z = sl(W ). This shows thatthe function sl is its own inverse.
8.2 ISOMETRIES
8.2.1
Definition A function f : Π→Π which satisfies |Z1,Z2|= |f (Z1), f (Z2)| for all pointsZ1,Z2 ∈ Π, is called an isometry of Π.
Each translation and each axial symmetry is an isometry.Proof . This follows from 8.1.1.
Each isometry f has the following properties:-
(i) The function f : Π → Π is one-one.
(ii) For all Z1,Z2 ∈Π, f ([Z1,Z2])= [ f (Z1), f (Z2)], so that each segment is mappedonto a segment, with the end-points corresponding.
(iii) For all distinct points Z1,Z2 ∈ Π, f ([Z1,Z2 ) = [ f (Z1), f (Z2) , so that eachhalf-line is mapped onto a half-line, with the initial points corresponding.
(iv) For all distinct points Z1,Z2 ∈ Π, f (Z1Z2) = f (Z1) f (Z2), so that each line ismapped onto a line. If f (Z) ∈ f (Z1) f (Z2) then Z ∈ Z1Z2.
(v) If Z1,Z2,Z3 are noncollinear points, then f ([Z1,Z2,Z3])≡[ f (Z1), f (Z2), f (Z3)].
(vi) Let Z3 �∈ l and H1,H2 be the closed half-planes with common edge l, withZ3 ∈ H1. Let H3,H4 be the closed half-planes with common edge f (l), withf (Z3) ∈ H3. Then f (H1)⊂ H3, f (H2)⊂ H4.
(vii) The function f : Π → Π is onto.
(viii) In (vi), f (H1) = H3, f (H2) = H4.

124 Translations; axial symmetries; isometries Ch. 8
(ix) If l and m are intersecting lines, then f (l) and f (m) are intersecting lines. If land m are parallel lines, then f (l) and f (m) are parallel lines.
(x) If the points Z1,Z2 and Z3 are non-collinear, then
|∠Z2Z1Z3|◦ = |∠f (Z2)f (Z1)f (Z3)|◦.
(xi) If l and m are perpendicular lines, then f (l)⊥ f (m).
(xii) If a point Z has Cartesian coordinates (x,y) relative to the frame of referenceF = ([O, I , [O,J ), then f (Z) has Cartesian coordinates (x,y) relative to theframe of reference ([ f (O), f (I) , [ f (O), f (J) ).
Proof .(i) If Z1 �= Z2 then |Z1,Z2|> 0 so that |f (Z1), f (Z2)|> 0, and so f (Z1) �= f (Z2).
(ii) If Z1 = Z2 the result is trivial, so suppose that Z1 �= Z2. Then for all Z ∈ [Z1,Z2],we have |Z1,Z|+ |Z,Z2|= |Z1,Z2| and so |f (Z1), f (Z)|+ |f (Z), f (Z2)|= |f (Z1), f (Z2)|.It follows by 3.1.2 and 4.3.1 that f (Z) ∈ [ f (Z1), f (Z2)] and so f ([Z1,Z2]) ⊂[ f (Z1), f (Z2)].
�
�
�
Z1
ZZ2
Figure 8.2.
�
�
�
f (Z1)
W
f (Z2)
Next let W ∈ [ f (Z1), f (Z2)]. Then |f (Z1),W| ≤ |f (Z1), f (Z2)| = |Z1,Z2|. Choose thepoint Z ∈ [Z1,Z2 so that |Z1,Z| = |f (Z1),W|; as |Z1,Z| ≤ |Z1,Z2| then Z ∈ [Z1,Z2].Moreover |f (Z1), f (Z)| = |Z1,Z|= |f (Z1),W|. Then f (Z) and W are both in[ f (Z1), f (Z2) and at the same distance from f (Z1) so f (Z) = W . Thus W is a valueof f at some point of [Z1,Z2]. Hence f ([Z1,Z2]) = [ f (Z1), f (Z2)].
(iii) By (i) f (Z1) �= f (Z2). Suppose that Z ∈ [Z1,Z2 . Then either Z ∈ [Z1,Z2]or Z2 ∈ [Z1,Z]. It follows from part (ii) of the present theorem, that then eitherf (Z) ∈ [ f (Z1), f (Z2)] or f (Z2) ∈ [ f (Z1), f (Z)]. Thus f (Z) ∈ [ f (Z1), f (Z2) and sof ([Z1,Z2 )⊂ [ f (Z1), f (Z2) .
If W ∈ [ f (Z1), f (Z2 ) choose Z ∈ [Z1,Z2 so that |Z1,Z| = |f (Z1),W|. Then bythe last paragraph f (Z) ∈ [ f (Z1), f (Z2) and as |f (Z1), f (Z)| = |f (Z1),W|, we havef (Z) = W . Thus W is a value of f at some point of [Z1,Z2 . Hence f ([Z1,Z2 ) =[ f (Z1), f (Z2) .

Sec. 8.2 Isometries 125
(iv) Take Z3 �= Z1 so that Z1 ∈ [Z2,Z3]. Then Z1Z2 = [Z1,Z2 ∪ [Z1,Z3 . Hence
f (Z1Z2) = f ([Z1,Z2 )∪ f ([Z1,Z3 )
= [ f (Z1), f (Z2) ∪ [ f (Z1), f (Z3)
= f (Z1) f (Z2), as f (Z1) ∈ [ f (Z2), f (Z3)].
If f (Z) ∈ f (Z1) f (Z2), then by the foregoing there is a point Z4 ∈ Z1Z2 such thatf (Z4) = f (Z) and then as f is one-one Z = Z4 ∈ Z1Z2.
(v) For
|Z2,Z3|= |f (Z2), f (Z3)|, |Z3,Z1|= |f (Z3), f (Z1)|, |Z1,Z2|= |f (Z1), f (Z2)|,so by the SSS-principle, these triangles are congruent in the correspondence
(Z1,Z2,Z3)→ ( f (Z1), f (Z2), f (Z3)) .
(vi) Suppose that f (H1) is not a subset of H3 . Then there is some Z4 ∈ H1
such that f (Z4) ∈ H4, f (Z4) �∈ f (l). Then f (Z3) and f (Z4) are on opposite sides off (l), so there is a point W on both f (l) and [ f (Z3), f (Z4)]. By (ii) there is a pointZ ∈ [Z3,Z4] such that f (Z) =W , and then by (i) and (iv) Z ∈ l. But this implies thatZ4 �∈H1 and so gives a contradiction. Hence f (H1)⊂H3 and by a similar argumentf (H2)⊂ H4.
(vii) Take distinct points Z1,Z2 in Π. If W ∈ f (Z1) f (Z2), then by (iv) f (Z) =Wfor some Z ∈ Z1Z2 and so W is a value of f .
��
��
�
�
�
Z1
Z
Z2
H1
Figure 8.3.
�
�
�
�
�
�
�
f (Z1)
W
f (Z2)H3
Suppose then that W �∈ f (Z1) f (Z2) and let H3 be the closed half-plane with edgef (Z1) f (Z2) which contains W . Let H1 be the closed half-plane with edge Z1Z2 suchthat by (vi) f (H1)⊂ H3. Take a point Z ∈ H1 such that|∠Z2Z1Z|◦ = |∠f (Z2)f (Z1)W|◦ and |Z1,Z| = |f (Z1),W|. Then by the SAS-principle[Z1,Z2,Z]≡ [ f (Z1), f (Z2),W ], and so by (v) [ f (Z1), f (Z2), f (Z)]≡ [ f (Z1), f (Z2),W ].In particular|∠f (Z2)f (Z1)f (Z)|◦ = |∠f (Z2)f (Z1)W|◦. As f (Z) ∈ H3, W ∈ H3 we then havef (Z) ∈ [ f (Z1),W . But by the congruence we also have |f (Z1), f (Z)| = |f (Z1),W|. Itfollows that f (Z) =W and so W is a value of f .

126 Translations; axial symmetries; isometries Ch. 8
(viii) Let W ∈ H3. Then by (vii) W = f (Z) for some Z ∈ Π. If W ∈ f (l) then by(iv) Z ∈ l ⊂H1. If W �∈ f (l) then W �∈H4 and by (vi) we cannot have Z ∈H2 as thatwould imply W ∈ H4. Thus again Z ∈ H1. In both cases W is a value f (Z) for someZ ∈ H1.
(ix) By part (iv) f (l), f (m) are lines. If Z belongs to both l and m, then f (Z)belongs to both f (l) and f (m) so these have a point in common.
On the other hand, if l ‖m suppose first that l =m. Then f (l) = f (m) and so f (l) ‖f (m). Next suppose that l �= m; then l ∩m = /0. We now must have f (l)∩ f (m) = /0,as if W were on both f (l) and f (m), by (iv) we would have W = f (Z) for someZ ∈ l, W = f (Z0) for some Z0 ∈ m. But by (i) Z = Z0 so we would have Z on both land m.
(x) By (v) the triangles [Z1,Z2,Z3], [ f (Z1), f (Z2), f (Z3)] are congruent, and so cor-responding angles have equal degree-measures.
(xi) If l and m are perpendicular, let Z1 be their point of intersection, and let Z2, Z3
be other points on l and m respectively. Then as in part (x), ∠Z2Z1Z3 is a right-angleand so its image is also a right-angle.
(xii) For any line l and any point Z we recall that πl(Z) denotes the foot of theperpendicular from Z to l. For any point Z ∈ Π, let U = πOI(Z) and V = πOJ(Z).Let O′ = f (O), I′ = f (I), J′ = f (J). Then O′ �= I′, O′ �= J′ and O′I′ ⊥ O′J′ so thatwe can take ([O′, I′ , [O′,J′ ) as a frame of reference. Let H1, H2 be the half-planeswith edge OI, with J ∈ H1, and H3, H4 the half-planes with edge OJ, with I ∈ H3.Similarly let H ′
1 , H ′2 be the half-planes with edge O′I′, with J′ ∈ H ′
1 , and H ′3 , H ′
4the half-planes with edge O′J′, with I′ ∈ H ′
3 .
� ��
�
� �
�
O I
J
U
V
H1
H2
H3H4
Z
�
�
�
�
�
�
�
�
�
O′I′J′
Z′
U ′
V ′
Figure 8.4.
If (x,y) are the Cartesian coordinates of Z relative to ([O, I , [O,J ), then
x =
{ |O,U|, if Z ∈ H3,−|O,U|, if Z ∈ H4.
But if Z′ = f (Z), U ′ = f (U) we have U ′ ∈ O′I′, and if Z �∈ OI we have ZU ⊥ OI andhence Z′U ′ ⊥ O′I′. It follows that U ′ = πO′I′(Z′). Moreover f (H3) = H ′
3 , f (H4) =

Sec. 8.3 Translation of frame of reference 127
H ′4 . Then if (x′,y′) are the Cartesian coordinates of Z′ relative to ([O′, I′ , [O′,J′ ),
when Z ∈ H3 we have Z′ ∈ H ′3 and so
x′ = |O′,πO′I′(Z′)|= |O′,U′|= |O,U|= x.
Similarly when Z ∈ H4 we have Z′ ∈ H ′4 and so
x′ =−|O′,πO′I′(Z′)|=−|O′,U′|=−|O,U|= x.
Thus x′ = x in all cases, and by a similar argument y′ = y.
8.2.2
If l = ml(|BAC), then sl([A,B ) = [A,C and sl([A,C ) = [A,B .Proof . We prove sl([A,B ) = [A,C as the other then follows. As A ∈ l we have
sl(A) = A and so by 8.2.1(iii) sl([A,B ) = [A,D for some point D.Suppose first that A,B,C are collinear. When C ∈ [A,B we have l = AB, and so
sl(P) = P for all P ∈ [A,B . As [A,B = [A,C the conclusion is then immediate. Onthe other hand when A ∈ [B,C] so that |BAC is straight, l is the perpendicular to AB atA. Then if A = mp(B,D) we have sl([A,B ) = [A,D , and [A,D = [A,C as D ∈ [A,C .
Finally suppose that A,B,C are non-collinear. Now take D ∈ [A,C so that |A,D|=|A,B|. If M = mp(B,D) by 4.1.1(iv) we have that l = AM and as sl(B) = D thensl([A,B ) = [A,D = [A,C .
8.3 TRANSLATION OF FRAME OF REFERENCE
NOTATION. By using 8.2.1(iii), (vi) and (xi), we showed in 8.2.1(xii) thatfor any frame of reference F = ([O, I , [O,J ) and any isometry f , F ′ =([ f (O), f (I) , [ f (O), f (J) ) is also a frame of reference, and that Cartesian coordi-nates of Z relative to F are also Cartesian coordinates of f (Z) relative to F ′. Wedenote F ′ by f (F ).
For any frame of reference F = ([O, I , [O,J ), let Z0 ≡F (x0,y0) and F ′ =tO,Z0(F ). Then if Z ≡F (x,y) we have Z ≡F ′ (x− x0,y− y0).Proof . By 8.2.1(xii), tO,Z0(Z)has coordinates (x,y) relative toF ′, and by 8.1.1(i) it also hascoordinate (x + x0,y + y0) rela-tive to F . Thus for all (x,y) ∈R × R the point with coordi-nates (x + x0,y + y0) relative toF has coordinates (x,y) rela-tive to F ′. On replacing (x,y) by(x−x0,y−y0), we conclude thatthe point with coordinates (x,y)relative to F has coordinates(x− x0,y− y0) relative to F ′.
� ��
�
� ��
�
� �
�
� �
�
�
�
O
O′
I
I′J
J′
H1
H2
H3H4
Z
Z′
U
U ′
V
V ′
Figure 8.5.

128 Translations; axial symmetries; isometries Ch. 8
Exercises
8.1 If T is the set of all translations of Π, show that (T ,◦) is a commutativegroup.
8.2 If I is the set of all isometries of Π, show that (I ,◦) is a group.
8.3 Given any half-lines [A,B , [C,D show that there is an isometry f which maps[A,B onto [C,D .
8.4 Show that each of the following concepts is an isometric invariant:- interiorregion of an angle-support, triangle, dividing a pair of points in a given ratio,mid-point, centroid, circumcentre, orthocentre, mid-line, incentre, parallelo-gram, rectangle, square, area of a triangle, circle, tangent to a circle.
8.5 For any line l, sl[C (O;k)] = C (sl(O);k) so that, in particular, if O ∈ l thensl [C (O;k)] = C (O;k).

9
Trigonometry; cosine and sine;addition formulae
COMMENT. In this chapter we go on to deal fully with reflex-angles as well as withwedge and straight ones, we define the cosine and sine of an angle and we deal withaddition of angles. As a vitally convenient aid to identifying the two angles with agiven support |BAC, we start by introducing the notion of the indicator of an angle.
9.1 INDICATOR OF AN ANGLE
9.1.1
Definition . If α is an angle with support |BAC, we call the other angle with support|BAC the co-supported angle for α , and denote it by co− sp α .
� �
α
co− sp αFigure 9.1. Co-supported angle.
�
�
�
�
i(α)
C
A
B
Figure 9.2. Angle indicators.
�
�
�
�
i(α)
C
A
B
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50009-4

130 Trigonometry; cosine and sine; addition formulae Ch. 9
Definition . Referring to 2.3.3, for each angle support |BAC let l = ml(|BAC)as in 3.6 and 4.1.1. When A �∈ BC, we call l ∩I R(|BAC) and l ∩ E R(|BAC) theindicators of the wedge-angle (|BAC,I R(|BAC)) and of the reflex-angle (|BAC ,E R(|BAC)), respectively. When A ∈ [B,C] we call l ∩H1, l ∩H2 the indicators ofthe straight-angles (|BAC,H1), (|BAC,H2), respectively. The null-angle with sup-port |BAB has indicator [A,B . The full-angle with support |BAB has indicator [A,Dwhere D �= A and A ∈ [B,D]. In each case an indicator is a half-line of l with initialpoint the vertex A. We denote the indicator of an angle α by i(α).
COMMENT. The first use we make of the concept of indicator is in defining thecosine and sine of any angle.
9.2 COSINE AND SINE OF AN ANGLE
9.2.1
Definition . Consider an angle αwith support |BAC such that theindicator i(α) lies in a closedhalf-plane H1 with edge AB.Then we define cosα and sinαas follows. Take any point P �= Aon [A,C , let Q ∈ [A,B be suchthat |A,Q| = |A,P| and R ∈ H1
be such that |A,R| = |A,P| andAR ⊥ AB.
� � � ��
�
�
�
�
�
� �
��
P
C
AU
Q
B
R
V
T
i(α)
H1
Figure 9.3. Cosine and Sine.
Let U,V be the feet of the perpendiculars from P to AB = AQ and AR respectively.Then we define
cosα =|A,P|− |Q,U|
|A,P| , sinα =|A,P|− |R,V|
|A,P| .
It follows from this definition that if H2 is the other half-plane with edge AB andif we take T ∈ H2 so that |A,T|= |A,P| and AT ⊥ AB, then
cos(co− sp α) =|A,P|− |Q,U|
|A,P| , sin(co− sp α) =|A,P|− |T,V|
|A,P| .
COMMENT. Two comments on this definition are in order. First we note thatwhen A,B,C are collinear, H1 and H2 are not uniquely determined above but areinterchangeable with each other, so that the angles α and co-spα are not uniquelydetermined. Our second comment is that to show that cos α , sinα are well-defined itis first necessary to use the ratio results for triangles to show that the values of cosαand sinα do not depend on the particular point P ∈ [A,C taken, and then to show thatif the arms [A,B and [A,C are interchanged the outcome is unchanged.
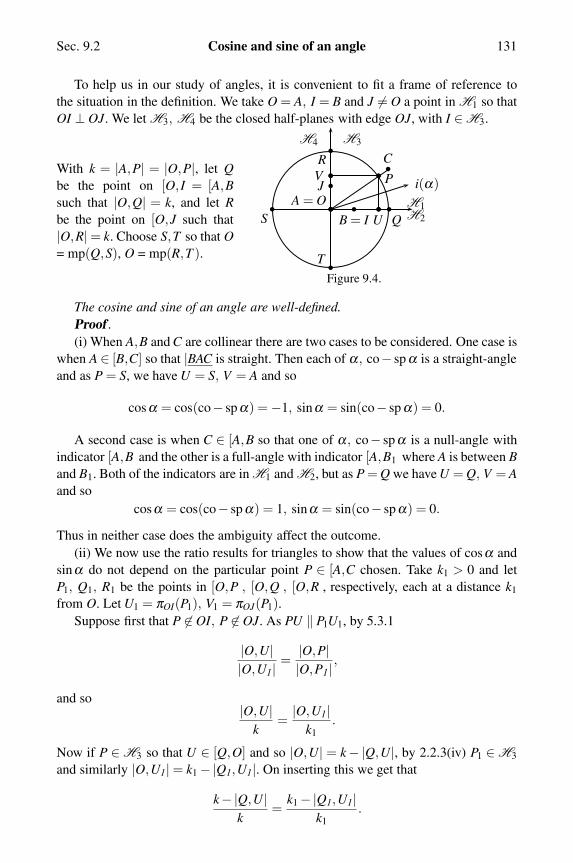
Sec. 9.2 Cosine and sine of an angle 131
To help us in our study of angles, it is convenient to fit a frame of reference tothe situation in the definition. We take O = A, I = B and J �= O a point in H1 so thatOI ⊥ OJ. We let H3, H4 be the closed half-planes with edge OJ, with I ∈ H3.
With k = |A,P| = |O,P|, let Qbe the point on [O, I = [A,Bsuch that |O,Q| = k, and let Rbe the point on [O,J such that|O,R|= k. Choose S,T so that O= mp(Q,S), O = mp(R,T ).
� � � � ��
�
�
�
�
�
�
� �
��
P
C
A = OJ
U QB = I
R
S
V
T
i(α)
H1H2
H3H4
Figure 9.4.
The cosine and sine of an angle are well-defined.Proof .(i) When A,B and C are collinear there are two cases to be considered. One case is
when A ∈ [B,C] so that |BAC is straight. Then each of α , co− sp α is a straight-angleand as P = S, we have U = S, V = A and so
cos α = cos(co− sp α) =−1, sinα = sin(co− sp α) = 0.
A second case is when C ∈ [A,B so that one of α , co− sp α is a null-angle withindicator [A,B and the other is a full-angle with indicator [A,B1 where A is between Band B1. Both of the indicators are in H1 and H2, but as P =Q we have U = Q, V = Aand so
cosα = cos(co− sp α) = 1, sinα = sin(co− sp α) = 0.
Thus in neither case does the ambiguity affect the outcome.(ii) We now use the ratio results for triangles to show that the values of cosα and
sinα do not depend on the particular point P ∈ [A,C chosen. Take k1 > 0 and letP1, Q1, R1 be the points in [O,P , [O,Q , [O,R , respectively, each at a distance k1
from O. Let U1 = πOI(P1), V1 = πOJ(P1).Suppose first that P �∈ OI, P �∈ OJ. As PU ‖ P1U1, by 5.3.1
|O,U||O,U1| =
|O,P||O,P1| ,
and so|O,U|
k=
|O,U1|k1
.
Now if P ∈ H3 so that U ∈ [Q,O] and so |O,U| = k−|Q,U|, by 2.2.3(iv) P1 ∈ H3
and similarly |O,U1|= k1 −|Q1,U1|. On inserting this we get that
k−|Q,U|k
=k1 −|Q1,U1|
k1.

132 Trigonometry; cosine and sine; addition formulae Ch. 9
When instead P ∈ H4, we have O ∈ [Q,U ] so |O,U| = |Q,U| − k and similarly|O,U1|= |Q1,U1|− k1. On inserting these we obtain
k−|Q,U|k
=k1 −|Q1,U1|
k1
again.When P ∈ OI we have either P = Q or P = S. When P = Q, we have P1 = Q1 and
the formula checks out. It checks out similarly in the cases when P is R, S or T .By a similar proof we find that
k−|R,V|k
=k1 −|R1,V1|
k1.
Thus it makes no difference to the values of cosα and sinα if P is replaced by P1.
� � � � ��
�
�
�
�
�
� �
�� �
��
PP1
O
J
UU1 QI
R
S
V
V1
T
i(α)
H1H2
H3H4
Figure 9.5.
� � � � ��
�
�
�
�
�
� �
���
�
�
�
�
�
�
�
P
O
J
U
Xsl(H1)
Q
W
I
R
S
V
Y
T
i(α)
H1H2
H3H4
Figure 9.6.
(iii) It remains to show that if the arms [A,B and [A,C are interchanged the out-come is unchanged. Let l = midlQOP so that sl(OQ) = OP and sl(H1) is a closedhalf-plane with edge OP. As i(α)⊂ H1 we have sl (i(α))⊂ sl(H1); but as i(α)⊂ l,sl (i(α)) = i(α) and thus i(α)⊂ sl(H1). If W = sl(R) then W ∈ sl(H1) and as OQ ⊥OR we have OP ⊥ OW . Moreover X = sl(U) = πOP(Q) and Y = sl(V ) = πOW (Q)satisfy |P,X|= |Q,U|, |W,Y|= |R,V|. Hence
k−|P,X|k
=k−|Q,U|
k,
k−|W,Y|k
=k−|R,V|
k.
This completes the proof.
9.2.2 Polar coordinates
For Z �= O, let k = |O,Z| and the angle α have support |IOZ and indicator i(α) inH1. Then if Z ≡F (x,y),
x = k cosα , y = k sinα .

Sec. 9.3 Angles in standard position 133
Proof . Let Q, R be the points where C (O;k) meets [O, I and [O,J , respectively;then Q and R have Cartesian coordinates (k,0) and (0,k), respectively. Let U, Vbe the feet of the perpendiculars from Z to the lines OI and OJ, so that these haveCartesian coordinates (x,0) and (0,y) respectively. Now O ≡ (0,0) and Z ≡ (x,y) soby the distance formula (x− 0)2 +(y− 0)2 = k2. Thus x2 + y2 = k2, so that x2 ≤ k2
and as k > 0 we have x ≤ k. Then by the distance formula
|Q,U|=√
(k− x)2 +(0−0)2 = k− x,
as k− x ≥ 0, and similarly |R,V|= k− y. Hence
cosα =k−|Q,U|
k=
k− (k− x)k
=xk,
sinα =k−|R,V|
k=
k− (k− y)k
=yk.
Thus x = k cosα , y = k sinα .We refer to k and α as polar coordinates of the point Z with respect to F .
9.2.3
With the notation of 9.2.1, let α be an angle with support |IOP= |QOP and indicatori(α) in H1. Then we have the following properties:-
(i) For all α , cos2 α + sin2 α = 1.
(ii) For P ∈ Q1, cos α ≥ 0, sin α ≥ 0; for P ∈ Q2, cosα ≤ 0, sinα ≥ 0; for P ∈Q3, cosα ≤ 0, sin α ≤ 0; for P ∈ Q4, cos α ≥ 0, sinα ≤ 0.
Proof .(i) As in the proof in 9.2.1,
cos α =±|O,U||O,P| , sinα =±|O,V|
|O,P| .
Now when O, U, P, V are not collinear they are the vertices of a rectangle and so|O,V|= |U,P|. Then by Pythagoras’ theorem
|O,U|2 + |U,P|2 = |O,P|2,and the result follows. It can be verified directly when P is any of Q, R, S, T .
(ii) This follows directly from details in the proof in 9.2.1.
9.3 ANGLES IN STANDARD POSITION
9.3.1 Angles in standard position
COMMENT. The second use that we make of the concept of indicator of an angle isto identify angles with respect to a frame of reference.

134 Trigonometry; cosine and sine; addition formulae Ch. 9
� � � ��
�
�
�
�
�
P
O
J
QI
R
S
T
i(α)
H1H2
H3H4
� � � ��
�
�
�
�
�
P
O
J
QI
R
S
T
i(α)
H1H2
H3H4
� � � ��
�
�
�
�
�
P
O
J
QI
R
S
T
i(α)
α H1H2
H3H4
Figure 9.7.
� � � ��
�
�
�
�
�
P
O
J
Q
I
R
S
T
i(α)H1H2
H3H4
Definition . We recall from 3.7 our extension of degree-measure to reflex-angles. Let|QOP be a non-straight support, and let H1, H2 be the closed-half planes with edgeOQ, with P ∈ H2. Let α be the reflex angle with support |QOP, so that i(α) ⊂ H1.Let S be the point such that O = mp(Q,S). Let β be the wedge or straight angle withsupport |SOP.
� � � ��
�
�
�
�
�
P
O
JQI
R
S
T
i(α)
αβ
H1H2
H3H4
Figure 9.8. Measure of a reflex angle.
Then we defined the degree measure of α by |α |◦ = 180+ |β |◦. In particular ifP = Q, then β is a straight angle, α is the full angle with support |POP = |QOQ andindicator [O,S , and |α |◦ = 360.
Definition . Given a frame of reference F = ([O, I , [O,J ), we denote by A ∗(F )the set of angles α with arm [O, I and with indicator i(α) ⊂ H1. These angles aresaid to be in standard position with respect to F .

Sec. 9.3 Angles in standard position 135
If α and γ are different angles in A ∗(F ), then |α |◦ �= |γ |◦.Proof . This is evident if α and γ are both wedge or straight angles and hence, by
addition of 180, if they are both reflex or straight. If α is wedge or straight and γ isreflex, then |α |◦ ≤ 180, |γ |◦ > 180.
NOTATION. Given any real number x such that 0 ≤ x ≤ 360, we denote the angleα ∈ A ∗(F ) with |α |◦ = x by xF . Thus the null, straight and full angles in A ∗(F )are denoted by 0F , 180F and 360F , respectively.
9.3.2 Addition of angles
COMMENT. Given angles α , β ∈ A ∗(F ) we wish to define two closely relatedforms of addition, the first suited to angle measure as to be dealt with in Chapter 12and the second suited to more general situations. As we make more use of the latterwe employ for it the common symbol +, and ⊕ for the former. As α ⊕β is to be anangle we need to specify its support and its indicator; similarly for α +β .
Definition . Let α ,β be angles in A ∗(F ) with supports |QOP1, |QOP2, respec-tively. Let l be the midline of |P1OP2 and let P3 = sl(Q). Then α ⊕β is an angle withsupport |QOP3 for which i(α ⊕ β ) ⊂ H1, so that α ⊕ β ∈ A ∗(F ). This identifiesα ⊕β uniquely except when P3 = Q; in this case both the null angle 0F and the fullangle 360F have support |QOQ and we define α ⊕ β to be this full angle 360F inevery case except when α and β are both null; in the latter case we define the sum tobe this null angle 0F . We call α ⊕β the sum of the angles α and β .
� � � ��
�
�
�
�
�
�
�
�
�
P1
P2
P3
O
J
QI
R
S
T
α
β
H1
H2
H3H4
Figure 9.9. Addition of angles.
For all angles α ,β ∈ A ∗(F ),
(i) cos(α ⊕β ) = cosα cosβ − sinα sinβ ,
(ii) sin(α ⊕β ) = sinα cosβ + cosα sin β .
Proof . On using the notation of 7.3.1 and above, we have
a1 = cos α ,b1 = sinα ,a2 = cosβ ,b2 = sin β ,a3 = cos(α ⊕β ),b3 = sin(α ⊕β ).

136 Trigonometry; cosine and sine; addition formulae Ch. 9
We note that in 7.3.1
(a1 +a2)2 +(b1 +b2)
2 = 2(1+a1a2 +b1b2),
as a21 +b2
1 = a22 +b2
2 = 1. Then, by 7.3.2, when P1 and P2 are not diametrically oppo-site,
cos(α ⊕β )− cosα cosβ + sinα sinβ
=(a1 +a2)
2 − (b1 +b2)2 +2(−a1a2 +b1b2)(1+a1a2 +b1b2)
2(1+a1a2 +b1b2),
and the numerator here is equal to
a21 +a2
2 −b21 −b2
2 −2a21a2
2 +2b21b2
2 = 2a21 +2a2
2 −2−2a21a2
2 +2(1−a21)(1−a2
2) = 0.
Similarly
sin(α ⊕β )− sinα cos β − cosα sinβ
=2(a1 +a2)(b1 +b2)−2(a1b2 +a2b1)(1+a1a2 +b1b2)
2(1+a1a2 +b1b2),
and the numerator here is equal to twice
a1b1 +a2b2 −a1b1(a22 +b2
2)−a2b2(a21 +b2
1) = 0.
When P1 and P2 are diametrically opposite,
cos(α ⊕β )− cosα cosβ + sinα sinβ = b21 −a2
1 −a1(−a1)+b1(−b1) = 0,
sin(α ⊕β )− sinα cosβ − cosα sinβ =−2a1b1 −b1(−a1)−a1(−b1) = 0.
9.3.3 Modified addition of angles
COMMENT. In 9.3.2 we clearly exercised a choice in specifying what α ⊕β shouldbe when P3 = Q. The choice made there is what suits length of a circle and area of adisk which will be treated in Chapter 12, and that was the reason for the choice made.We now define modified addition α +β of angles, which is easier to use.
Definition . Let A (F ) = A ∗(F )\{360F }, so that A (F ) is the set of all non-full angles in A ∗(F ). We denote by ∠F QOP =∠F IOP the unique angle in A (F )with support |QOP = |IOP.
Definition . Let α ,β be angles in A (F ) with supports |QOP1, |QOP2. Let l bethe midline of |P1OP2 and let P3 = sl(Q). Then α +β is the angle in A (F ) withsupport |QOP3. Note that when P3 = Q we have α + β = 0F . We call α + β themodified sum of the angles α and β .
For all α ,β ∈ A (F ),
cos(α +β ) = cosα cosβ − sinα sin β , sin(α +β ) = sinα cosβ + cosα sin β .
Proof . This follows immediately from 9.3.2 as cos360F = cos0F ,sin360F =sin0F .

Sec. 9.3 Angles in standard position 137
Modified addition + of angles has the following properties:-
(i) For all α ,β ∈ A (F ), α +β is uniquely defined and lies in A (F ).
(ii) For all α ,β ∈ A (F ), α +β = β +α .
(iii) For all α ,β ,γ ∈ A (F ), (α +β )+ γ = α +(β + γ).
(iv) For all α ∈ A (F ), α +0F = α .
(v) Corresponding to each α ∈ A (F ), there is a β ∈ A (F ) such that α +β =0F .
Proof .(i) This is evident from the definition.(ii) This is evident as the roles of P1 and P2 are interchangeable in the definition.(iii) We note that by the last result
cos[(α +β )+ γ ] = cos(α +β )cosγ − sin(α +β )sinγ
and then
cos[(α +β )+ γ ] = [cosα cosβ − sinα sin β ]cosγ − [sinα cos β + cosα sinβ ]sin γ ,
while
cos[α +(β + γ)] = cosα cos(β + γ)− sinα sin(β + γ)= cosα [cosβ cos γ − sinβ sinγ ]− sinα [sin β cosγ + cosβ sin γ ],
and these are equal. Similarly
sin[(α +β )+ γ ] = sin(α +β )cosγ + cos(α +β )sinγ= [sinα cos β + cosα sinβ ]cos γ +[cosα cosβ − sinα sin β ]sinγ ,
while
sin[α +(β + γ)] = sinα cos(β + γ)+ cosα sin(β + γ)= sinα [cos β cosγ − sinα sinβ ]+ cosα [sinβ cos γ + cosβ sinγ ],
and these are equal. Thus (α +β )+ γ and α +(β + γ) are angles in A (F ) with thesame cosine and the same sine and so by 9.2.2 they are equal.
(iv) When β = 0F , in the definition we have P2 = Q and then l is the midline of|QOP1 and so P3 = P1. Thus α and α +0F are both in A (F ) and they have the samesupport, so they must be equal.
(v) Given any angle α ∈ A (F ) with support |QOP1, let P2 = sOI(P1) and β bethe angle in A (F ) with support |QOP2. Then l = OI is the midline of |P1OP2 andso in the definition P3 = sl(Q) = Q. Thus α +β has support |QOQ and so it is 0F .
COMMENT. The properties just listed show that (A (F ),+) is a commutativegroup. Because of this the familiar properties of addition, subtraction and additivecancellation apply to it.

138 Trigonometry; cosine and sine; addition formulae Ch. 9
9.3.4 Subtraction of angles
Definition . For all α ∈A (F ), we denote the an-gle β in 9.3.3(v) by −α .The difference γ − α inA (F ) is defined by spec-ifying that γ − α = γ +(−α). In this way we dealwith subtraction.
� � � ��
�
�
�
�
�
�
�
P1
P2
O
J
QI
R
S
T
i(α)
α−αH1H2
H3H4
Figure 9.10.
For all α ∈ A (F ),
cos(−α) = cos(co− sp α) = cosα , sin(−α) = sin(co− sp α) =−sinα .
Proof . With P2 as in the proof of 9.3.3(v), we have
cos(−α) =k−|Q,U|
k, sin(−α) =
k−|R,V1|k
,
and |R,V1|= |T,V|= 2k−|R,V|. We use this in conjunction with 9.2.1.
9.3.5 Integer multiples of an angle
Definition . For all n ∈ N and all α ∈ A (F ), nα is defined inductively by
1α = α ,
(n+1)α = nα +α , for all n ∈ N.
We refer to nα as integer multiples of the angle α .
For all α ∈ A (F ),
(i) cos(2α) = cos2 α − sin2 α = 2cos2 α −1 = 1−2sin2 α ,
(ii) sin(2α) = 2cos α sinα .
Proof . These are immediate by 9.3.3 and 9.2.3.
9.3.6 Standard multiples of a right-angle
The angles 90F ,180F ,270F have the following properties:-

Sec. 9.4 Half angles 139
(i)
cos90F = 0, sin90F = 1, cos 180F =−1,
sin180F = 0, cos270F = 0, sin270F =−1.
(ii) 2(90F ) = 180F , 2(180F ) = 0F so that −180F = 180F , and 90F +270F =0F so that 270F =−90F .
(iii) For all α ∈ A (F ),
cos(α +90F ) =−sinα , sin(α +90F ) = cosα ,
cos(α +180F ) =−cosα , sin(α +180F ) =−sinα ,
cos(α +270F ) = sinα , sin(α +270F ) =−cosα .
Proof .(i) These follow immediately from 9.2.1.(ii) These follow from 9.2.1 and 9.3.4.(iii) These follow immediately from 9.3.3 and (i) of the present theorem.
9.4 HALF ANGLES
9.4.1
Definition . Given any angle α ∈ A (F ) with support |QOP, its indicator i(α) meetsC (O;k) in a unique point P′ which is in H1. Then the wedge or straight angle inA (F ) with support |QOP′ is denoted by 1
2α and is called a half-angle.Given any angle α ∈ A (F ), the equation 2γ = α has exactly two solutions in
A (F ), these being 12α and 1
2α +180F .Proof . In the definition we have12α = ∠F QOP′ and take P′′ sothat O = mp(P′,P′′). Let β =∠F QOP′′ so that β = 1
2α +180F . Then sOP′(Q) = P so thatby 9.3.3, 2(1
2 α) = α , 2β = α .Now suppose that γ , δ ∈ A (F )and 2γ = 2δ =α . Then cos 2δ =cos2γ so that 2cos2 δ − 1 =2cos2 γ − 1, and hence cosδ =±cosγ .
� � � ��
�
�
�
�
�
P
P′
O
J
QI
R
S
T
i(α)
α12α
H1H2
H3H4
Figure 9.11.
Then also sin2 δ = sin2 γ so sinδ = ±sinγ . Moreover sin 2δ = sin2γ so2sin δ cosδ = 2sin γ cosγ .
We first suppose that α �= 180F so that cosα �= −1 and so cosγ �= 0. Then ifcosδ = cos γ we must have sinδ = sinγ , and so δ = γ . Alternatively we must havecosδ =−cosγ , sinδ =−sinγ and so δ = γ +180F .

140 Trigonometry; cosine and sine; addition formulae Ch. 9
If α = 180F then cos δ = 0, so that sin δ =±1 and so δ is either 90F or 270F .
COMMENT. Our definition of a half-angle is the standard one for the angles wedeal with, but it would not suit angles which we do not consider, for example oneswith degree-magnitude greater than 360. The latter are difficult to give an account ofgeometrically. For us 1
2 α + 12 β and 1
2(α +β ) need not be equal; we shall deal withsuch matters in 12.1.1. Because of this, there is a danger of error if half-angles areused incautiously.
For any angles α , β ∈ A (F ), if γ = 12α + 1
2 β and δ = 12α − 1
2β , then γ +δ = αand γ −δ = β .
Proof . As we are dealing with a commutative group, we have
γ +δ =[
12α + 1
2 β]+[
12α +
(− 12β)]
=[
12α + 1
2 α]+[
12β +
(− 12β)]
= α +0F = α .
Similarly
γ −δ =[
12α + 1
2 β]− [1
2α +(− 1
2β)]
=[
12α + 1
2 β]+[(− 1
2α)+ 1
2β]
= β .
9.5 THE COSINE AND SINE RULES
9.5.1 The cosine rule
NOTATION. Let A,B,C be non-collinear points. Then for the triangle [A,B,C] wedenote by a the length of the side which is opposite the vertex A, by b the length ofthe side opposite B, and by c the length of the side opposite C, so that
a = |B,C|, b = |C,A|, c = |A,B|.We also use the notation
α = ∠BAC, β = ∠CBA, γ = ∠ACB.
Let A,B,C be non-collinear points, let D = πBC(A) and write x = |B,D|. Thenwith the notation above, 2ax = a2 + c2 − b2 when D ∈ [B,C] or C ∈ [B,D], while2ax = b2 −a2 − c2 when B ∈ [D,C].
Proof . When D ∈ [B,C] we have |D,C| = a− x, and when C ∈ [B,D], |D,C| =x−a. In both of these cases, by Pythagoras’ theorem used twice we have
|A,D|2 = |A,B|2 −|B,D|2 = c2 − x2, |A,D|2 = |A,C|2 −|D,C|2 = b2 − (a− x)2.
On equating these we have c2 − x2 = b2 −a2 +2ax− x2, giving 2ax = c2 +a2 −b2.When B ∈ [D,C] we have |D,C|= a+ x, so by the formulae for |A,D|2 above we
have c2 − x = b2 − (a+ x)2. This simplifies to 2ax = b2 −a2 − c2.

Sec. 9.5 The cosine and sine rules 141
� � �
�
A
BC
D
Figure 9.12.
� �
��
�
A
B
C D
�
� �
�
� �
A
B
CD
The cosine rule. In each triangle [A,B,C],
cosα =b2 + c2 −a2
2bc, cos β =
c2 +a2 −b2
2ca, cos γ =
a2 +b2 − c2
2ab.
Proof On returning to the last proof, we note that when D ∈ [B,C we have
cosβ =|B,D||B,A| =
xc,
while
x =c2 +a2 −b2
2a,
and so
cos β =c2 +a2 −b2
2ca.
Similarly, when B ∈ [D,C] we have
cosβ =−|B,D||B,A| =−x
c,
while
x =−c2 +a2 −b2
2a,
and this gives the same conclusion.
9.5.2 The sine rule
The sine rule In each triangle [A,B,C],
sinαa
=sinβ
b=
sin γc
.
Proof . By the cosine rule
cos2 αa2 =
1− sin2 αa2 =
(b2 + c2 −a2)2
4a2b2c2 ,

142 Trigonometry; cosine and sine; addition formulae Ch. 9
so that
sin2 αa2 =
4b2c2 − (b2 + c2 −a2)2
4a2b2c2
=2(b2c2 + c2a2 +a2b2)− (a4 +b4 + c4)
4a2b2c2 .
As the right-hand side here is symmetrical in a,b and c we must have
sin2 αa2 =
sin2 βb2 =
sin2 γc2 .
As the sines of wedge-angles are all positive, we may take square roots here and theresult follows.
9.5.3
In a triangle [A,B,C], let the mid-line of |BAC meet [B,C] at D and let d1 = |A,D|.Then
d1 =2bc
b+ ccos
12
α .
Proof . By 5.5|B,D||D,C| =
cb,
so that|B,D|= c
b+ ca.
On applying the sine rule to the triangle [A,B,D] we have that
d1
sinβ=
cab+ c
1
sin 12α
,
and so
d1 =ca
b+ csinβ
sin 12α
=ca
b+ csinβ
bb
sin 12α
=ca
b+ csinα
ab
sin 12 α
=2bc
b+ ccos
12
α .
9.5.4 The Steiner-Lehmus theorem, 1842
Suppose that we are given a tri-angle [A,B,C], that the mid-lineof |CBA meets CA at E , that themid-line of |ACB meets AB at F ,and that |B,E|= |C,F|. We thenwish to show that the triangle isisosceles. This is known as theSteiner-Lehmus theorem.
� �
�
��
�
�
�
A
B C
EF
Figure 9.13. Steiner-Lehmus theorem.

Sec. 9.6 Cosine and sine of angles equal in magnitude 143
Proof . By the last result we have d2 =2cac+a cos 1
2β , d3 =2aba+b cos 1
2γ . Then
d22 −d2
3 = 4a2[
c2
(c+a)2 cos2 12
β − b2
(a+b)2 cos2 12
γ]
= 2a2[
c2
(c+a)2 (1+ cosβ )− b2
(a+b)2 (1+ cosγ)]
= 2a2[
c2
(c+a)2
(1+
c2 +a2 −b2
2ca
)− b2
(a+b)2
(1+
a2 +b2 − c2
2ab
)]
= a
[c−b+
bc2
(a+b)2 −b2c
(c+a)2
]
= a
[c−b+
bc(a+b)2(c+a)2 [c(c+a)2 −b(a+b)2]
]
= a(c−b)
[1+
bc(a+b)2(c+a)2 [a
2 +b2 + c2 +2ab+bc+2ca]
]
Then b < c implies that d2 > d3.
9.6 COSINE AND SINE OF ANGLES EQUAL IN MAG-NITUDE
9.6.1
If angles α ,β are such that |α |◦ = |β |◦, then cosα = cos β and sinα = sin β . Con-versely if cosα = cosβ and sinα = sinβ , then |α |◦ = |β |◦ unless one of them is nulland the other is full.
Proof . Let F = ([O, I , [O,J ) and α have support |QOP and indicator in H1,where |O,P| = |O,Q| = k. Let F ′ = ([O′, I′ , [O′,J′ ) and β have support |Q′O′P′
and indicator in H ′1 , where |O′,P′|= |O′,Q′|= k.
� � ��
�
O I
J
P
Q
H1
H2
H3H4
�
�
�
�
�
�
O′I′J′
P′
Q′
Figure 9.14.

144 Trigonometry; cosine and sine; addition formulae Ch. 9
We suppose first that |α |◦ = |β |◦ ≤ 90 so that P ∈ Q1, P′ ∈ Q′1. Then U ∈
[O,Q], V ∈ [O,R], U ′ ∈ [O′,Q′], V ′ ∈ [O′,R′]. The triangles [O,U,P], [O′,U ′,P′]are congruent by the ASA-principle, so |O,U| = |O′,U′|, |O,V| = |O′,V ′|. Then|Q,U|= |Q′,U′|, |R,V|= |R′,V ′|. Hence cosα = cosβ , sinα = sinβ .
Similar arguments work in the case of the other three quadrants of F .Conversely, let cosα = cosβ , sinα = sin β . Suppose first that cos α ≥ 0, sinα ≥
0. Then P ∈ Q1, P′ ∈ Q′1. But |Q,U| = |Q′,U′|, |R,V| = |R′,V ′| and so |O,U| =
|O′,U′|, |U,P| = |U′,P′|. By the SSS-principle, the triangles [O,U,P], [O′,U ′,P′]are congruent so |α |◦ = |β |◦, unless we have a degeneration from a triangle and oneangle is null and the other is full.
A similar argument works for the other three quadrants of F .
Exercises
9.1 Prove that for all angles α ∈ A ∗(F ),
−1 ≤ cosα ≤ 1, −1 ≤ sinα ≤ 1.
9.2 Let C1 be the circle with centre O and radius of length k. Let Z1 ≡(k cos θ ,k sin θ), Z2 ≡ (−k,0), Z3 ≡ (k,0), so that Z1 is a point on this cir-cle, and [Z2,Z3] is a diameter. Let C2 be the circle with [Z1,Z3] as diameter.Find the coordinates of the second point in which C2 meets the line Z2Z3. Howdoes this relate to 4.3.3?
9.3 If D is the mid-point of the side [B,C] of the triangle [A,B,C] and d1 = |A,D|,prove that
4d21 = b2 + c2 +2bccos α .
Deduce that 2d1 > a if and only if α is an acute angle.
9.4 Prove the identities
cosα + cosβ = 2cos(12α + 1
2β )cos(12α − 1
2β ),cosα − cosβ =−2sin(1
2α + 12β )sin(1
2α − 12β ),
and find similar results for sinα + sinβ and sinα − sinβ .
9.5 Show that
sin270F + sin210F =−32,
and yet
2sin[12(270F +210F )]cos[1
2(270F −210F )] =32.
10
Complex coordinates; sensedangles; angles between lines
COMMENT. In this chapter we utilise complex coordinates, develop sensed anglesand rotations, complete our formulae for axial symmetries and identify isometriesin terms of translations, rotations and axial symmetries. We go on to establish moreresults on circles and consider a variant on the angles we have been dealing with.
10.1 COMPLEX COORDINATES
10.1.1
We now introduce the field of complex numbers (C,+, .) as an aid. This has an addedconvenience when doing coordinate geometry. We recall that any z∈C can be writtenuniquely in the form z = x+ ıy, where x,y ∈ R and ı2 = −1. We use the notations|z|=
√x2 + y2, z = x− ıy for the modulus or absolute value, and complex conjugate,
respectively, of z. As well as having the familiar properties for addition, subtraction,multiplication and division (except division by 0), these have the further properties:
z = z, z1z2 = z1 z2, ∀ z,z1,z2 ∈ C; z = z iff z ∈ R;
|z1z2|= |z1||z2|, |z|= |z|, ∀ z,z1,z2 ∈ C; |z|= z iff z ∈ R and z ≥ 0;
zz = |z|2, ∀ z ∈ C;1z=
z
|z|2 ∀ z �= 0.
Definition . Let F = ([O, I , [O,J ) be a frame of reference for Π and for any pointZ ∈ Π we recall the Cartesian coordinates (x,y) of Z relative to F , Z ≡F (x,y). Ifz = x+ ıy, we also write Z ∼F z, and call z a Cartesian complex coordinate of thepoint Z relative to F . When F can be understood, we can relax our notation anddenote this by Z ∼ z.
Complex coordinates have the following properties:-
(i) |z2 − z1|= |Z1,Z2| for all Z1,Z2.
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50010-0

146 Complex coordinates; sensed angles; angles between lines Ch. 10
(ii) If Z1 �= Z2, then Z ∈ Z1Z2 if and only if z− z1 = t(z2 − z1) for some t ∈ R.
(iii) If Z1 �= Z2, then Z ∈ [Z1,Z2 if and only if z− z1 = t(z2 − z1) for some t ≥ 0.
(iv) If Z1 �= Z2, then Z ∈ [Z1,Z2] if and only if z− z1 = t(z2 − z1) for some t suchthat 0 ≤ t ≤ 1.
(v) For Z1 �= Z2 and Z3 �= Z4, Z1Z2 ‖ Z3Z4 if and only if z4 − z3 = t(z2 − z1) forsome t ∈ R\{0}.
(vi) For Z1 �= Z2 and Z3 �= Z4, Z1Z2 ⊥ Z3Z4 if and only if z4 − z3 = tı(z2 − z1) forsome t ∈ R\{0}.
Proof .(i) For |z2 − z1|2 = |x2 − x1 + ı(y2 − y1)|2 = (x2 − x1)
2 +(y2 − y1)2 = |Z1,Z2|2.
(ii) For z− z1 = t(z2 − z1) if and only if x− x1+ ı(y− y1) = t[x2 − x1 + ı(y2 − y1)].If this happens for some t ∈ R, then x−x1 = t(x2 −x1), y−y1 = t(y2 −y1). By 6.4.1,Corollary (i), this implies that Z ∈ Z1Z2.
Conversely if Z ∈ Z1Z2, by the same reference there is such a t ∈ R and it followsthat z− z1 = t(z2 − z1).
(iii) and (iv). In (ii) we have Z ∈ [Z1,Z2 when t ≥ 0 by 6.4.1, Corollary, andsimilarly Z ∈ [Z1,Z2] when 0 ≤ t ≤ 1.
(v) By 6.5.1, Corollary (ii), Z1Z2 and Z3Z4 are parallel only if
−(y2 − y1)(x4 − x3)+ (y4 − y3)(x2 − x1) = 0. (10.1.1)
We note that as Z1 �= Z2 we must have either x1 �= x2 or y1 �= y2.Suppose first that z4 − z3 = t(z2 − z1) for some t ∈ R. Then
x4 − x3 + ı(y4 − y3) = t(x2 − x1)+ ıt(y2 − y1),
and so as t is real,
x4 − x3 = t(x2 − x1), y4 − y3 = t(y2 − y1).
Then
− (y2 − y1)(x4 − x3)+ (y4 − y3)(x2 − x1)
=−(y2 − y1)t(x2 − x1)+ t(y2 − y1)(x2 − x1) = 0,
so that (10.1.1) holds and hence the lines are parallel.Conversely suppose that the lines are parallel so that (10.1.1) holds. When x1 �= x2,
we lett =
x4 − x3
x2 − x1,
so that x4 − x3 = t(x2 − x1). On inserting this in (10.1.1), we have
−t(y2 − y1)(x2 − x1)+ (y4 − y3)(x2 − x1) = 0,

Sec. 10.1 Complex coordinates 147
from which we have y4 − y3 = t(y2 − y1).When x2 − x1 = 0, by (10.1.1) we must have x4 − x3 = 0. We now let
t =y4 − y3
y2 − y1,
so that y4 − y3 = t(y2 − y1). For this t we also have, trivially, x4 − x3 = t(x2 − x1).
Thus in both cases x4−x3 = t(x2 −x1), y4 −y3 = t(y2 −y1), and so on combiningthese
x4 − x3 + ı(y4 − y3) = t(x2 − x1)+ ıt(y2 − y1).
Thus z4 − z3 = t(z2 − z1).
(vi) By 6.5.1, Corollary (i), these lines are perpendicular if and only if
(y2 − y1)(y4 − y3)+ (x2 − x1)(x4 − x3) = 0. (10.1.2)
Suppose first that z4 − z3 = tı(z2 − z1) for some t ∈ R. Then
x4 − x3 + ı(y4 − y3) = ıt(x2 − x1)− t(y2 − y1),
and so as t is real, x4 − x3 =−t(y2 − y1), y4 − y3 = t(x2 − x1). Then
(y2 − y1)(y4 − y3)+ (x2 − x1)(x4 − x3)
= (y2 − y1)t(x2 − x1)− t(x2 − x1)(y2 − y1) = 0,
so that (10.1.2) holds, and hence the lines are perpendicular.Conversely suppose that the lines are perpendicular so that (10.1.2) holds. When
x1 �= x2, we let
t =y4 − y3
x2 − x1
so that y4 − y3 = t(x2 − x1). On inserting this in (10.1.2), we have
(y2 − y1)t(x2 − x1)+ (x2 − x1)(x2 − x1) = 0,
from which we have x4 − x3 =−t(y2 − y1).When x2 − x1 = 0, by (10.1.2) we must have y4 − y3 = 0. We now let
t =−x4 − x3
y2 − y1,
so that x4 − x3 =−t(y2 − y1). For this t we also have, trivially, y4 − y3 = t(x2 − x1).Thus in both cases x4−x3 =−t(y2−y1), y4−y3 = t(x2−x1), and so on combining
these
x4 − x3 + ı(y4 − y3) =−t(y2 − y1)+ ıt(x2 − x1) = ıt[x2 − x1 + ı(y2 − y1)].
Thus z4 − z3 = tı(z2 − z1).

148 Complex coordinates; sensed angles; angles between lines Ch. 10
10.2 COMPLEX-VALUED DISTANCE
10.2.1 Complex-valued distance
The material in 7.6 is long established; we can generalise those concepts of senseddistances and sensed ratios as follows.
Definition . Let F be a frame of reference for Π. If Z1 ∼F z1, Z2 ∼F z2 wedefine Z1Z2F = z2 − z1, and call this a complex-valued distance from Z1 to Z2. Wethen consider also Z3Z4F
Z1Z2F
, a ratio of complex-valued distances or complex ratio whenZ1 �= Z2.
We show that this latter reduces to the sensed ratio
Z3Z4≤l
Z1Z2≤l
when Z1,Z2,Z3,Z4 are points of a line l. As in 7.6.1 we suppose that l is the line W0W1
where W0 ≡ (u0,v0) and W1 ≡ (u1,v1), and has parametric equations
x = u0 + s(u1 −u0), y = v0 + s(v1 − v0).
By 10.1.1(ii) l then has complex parametric equation z = w0 + s(w1 −w0). IfZ1, Z2, Z3, Z4 have parameters s1, s2, s3, s4, respectively, then
z2 − z1 = (z2 −w0)− (z1 −w0) = (s2 − s1)(w1 −w0), z4 − z3 = (s4 − s3)(w1 −w0),
and soZ3Z4F
Z1Z2F
=s4 − s3
s2 − s1.
By 7.6.1 this is equal to the sensed ratio. This shows that for four collinear points aratio of complex-valued distances reduces to the corresponding ratio of sensed dis-tances.
COMMENT. We could make considerable use of this concept in our notation forthe remainder of this chapter but in fact we use it sparingly.
10.2.2 A complex-valued trigonometric function
For Z0 ∼F z0 and F ′ = tO,Z0(F ), let I0 = tO,Z0(I); we recall from 8.3 that Z ∼F ′
z− z0. Then if Z �= Z0, Z ∼F z and θ = ∠F ′I0Z0Z, by 9.2.2 we have
x− x0 = r cos θ , y− y0 = r sin θ ,
where r = |Z0,Z|= |z− z0|. It follows that z− z0 = r(cos θ + ısinθ).

Sec. 10.2 Complex-valued distance 149
� ��
�
O I
J H1
H2
H3H4
� ��
�
�
�
Z0 I0
J0Z
θ
Figure 10.1.
� ��
�
O IJ H1
H2
H3H4
� ��
�
�
�
�
�
Z0 I0
J0 Z1Z
α
If Z1 �= Z0, Z1 ∼F z1 and α =∠F ′ I0Z0Z1, then by this
x1 − x0 = k cos α , y1 − y0 = k sin α ,
where k = |Z0,Z1|. On inserting this in 6.3.1 Corollary, we see that
Z0Z1 = {Z ≡ (x,y) : (x− x0)sin α − (y− y0)cos α = 0} .
When Z0Z1 is not parallel to OJ we have that cosα �= 0 and this equation of the lineZ0Z1 can be re-written as y− y0 = tanα(x− x0) where tanα = sinα/cos α . We calltanα the slope of this line.
Notation. For any angle θ we write cis θ = cosθ + ısinθ .
The complex-valued function cis has the properties:-
(i) For all θ ,φ ∈ A (F ),cis (θ +φ) = cis θ .cis φ .
(ii) cis 0F = 1.
(iii) For all θ ∈ A (F ), 1cis θ = cis (−θ).
(iv) For all θ ∈A (F ),cis θ = cis (−θ), where z denotes the complex conjugate ofz.
(v) For all θ , |cis θ |= 1.
Proof .(i) For
cis θ .cis φ = (cos θ + ısinθ)(cos φ + ısinφ)= cosθ cos φ − sinθ sinφ + ı[sinθ cos φ + cosθ sin φ ]= cos(θ +φ)+ ısin(θ +φ) = cis (θ +φ).
(ii) For cis 0F = cos0F + ısin0F = 1+ ı0 = 1.

150 Complex coordinates; sensed angles; angles between lines Ch. 10
(iii) For by (i) and (ii) of the present theorem,
cis θ .cis (−θ) = cis (θ −θ) = cis 0F = 1.
(iv) For the complex conjugate of cosθ + ısin θ is cos θ − ısin θ = cos(−θ) +ısin(−θ).
(v) For |cis θ |2 = cos2 θ + sin2 θ = 1.
10.3 ROTATIONS AND AXIAL SYMMETRIES
10.3.1 Rotations
Definition . Let Z0 ∼F z0, t be the translation tO,Z0 ,F′ = t(F ) and I0 = t(I). Let
α ∈ A (F ′). The function rα ;Z0 : Π → Π defined by
Z ∼F z, Z′ ∼F z′, rα ;Z0(Z) = Z′ if z′ − z0 = (z− z0)cis α ,
is called rotation about the point Z0 through the angle α .
� ��
�
O I
J H1
H2
H3H4
� ��
�
�
�
�
�
�
�
Z0 I0
J0
Z1
Z
Z′
α
θ ′
θ
Figure 10.2.
If rα ;Z0(Z) = Z′ we have the following properties:-
(i) In all cases |Z0,Z′|= |Z0,Z|, and hence in particular rα ;Z0(Z0) = Z0.
(ii) If Z �= Z0, θ = ∠F ′I0Z0Z and θ ′ = ∠F ′I0Z0Z′, then θ ′ = θ +α .
(iii) If Z0 ∼F z0, Z ∼F z, Z′ ∼F z′, then rα ;Z0 has the real coordinates form
x′ − x0 = cosα .(x− x0)− sinα .(y− y0),
y′ − y0 = sinα .(x− x0)+ cosα .(y− y0),

Sec. 10.3 Rotations and axial symmetries 151
which has the matrix form(x′ − x0
y′ − y0
)=
(cos α −sinαsinα cos α
)(x− x0
y− y0
).
Proof .(i) For |z′ − z0|= |(z− z0)cis α |= |z− z0||cis α |= |z− z0|.(ii) For by 10.2.2
z− z0 = |z− z0|cis θ , z′ − z0 = |z′ − z0|cis θ ′,
and so |z′ − z0|cis θ ′ = |z− z0|cis θcis α . Hence cis θ ′ = cis θcis α = cis (θ +α) andso θ ′ = θ +α by 9.2.2.
(iii) Now x′ − x0 + ı(y′ − y0) = (cos α + ısinα)[x− x0 + ı(y− y0)] and so
x′ − x0 = cosα .(x− x0)− sinα .(y− y0),
y′ − y0 = sinα .(x− x0)+ cosα .(y− y0).
COMMENT. The rotation rα ;Z0 is characterised by (i) and (ii), as the steps can betraced backwards. Why a frame of reference F ′ is prominent in this characterisationstems from the need to identify the angles α ,θ ,θ ′.
10.3.2 Formula for an axial symmetry
� ��
�
O I
J H1
H2
H3H4
� ��
�
�
�
�
�
�
Z0 I0
J0Z1
Z
sl(Z)
α
l
Figure 10.3.
The form of equation of a line noted in 10.2.2 can be used in the formula in 6.6.1(iii)for an axial symmetry. However, for practice with complex-valued coordinates wededuce the result independently.

152 Complex coordinates; sensed angles; angles between lines Ch. 10
Let l be the line Z0Z1, Z0 ∼F z, F ′ = tO,Z0(F ), I0 = tO,Z0(I) and α =∠F ′I0Z0Z1.Then sl(Z) = Z′ where
Z ∼F z, Z′ ∼F z′, z′ − z0 = (z− z0)cis 2α ,
so that sl has the real coordinates form
x′ − x0 = cos2α .(x− x0)+ sin2α .(y− y0),
y′ − y0 = sin2α .(x− x0)− cos2α .(y− y0),
and so has the matrix form(x′ − x0
y′ − y0
)=
(cos2α sin2αsin2α −cos2α
)(x− x0
y− y0
).
Proof . To find a formula for Z′ = sl(Z) we first show that if W = πl(Z) and W ∼F
w then
w− z0 = ℜ[
z− z0
z1 − z0
](z1 − z0), z−w = ıℑ
[z− z0
z1 − z0(z1 − z0)
].
To start on this we note that
z− z0 =z− z0
z1 − z0(z1 − z0) =
[ℜ
z− z0
z1 − z0
](z1 − z0)+ ı
[ℑ
z− z0
z1 − z0
](z1 − z0).
If we now define w by
w− z0 =
[ℜ
z− z0
z1 − z0
](z1 − z0)
then W ∈ Z0Z1 as w− z0 is a real multiple of z1 − z0. But then
z−w = ı
[ℑ
z− z0
z1 − z0
](z1 − z0),
so W is on a line through Z which is perpendicular to Z0Z1. Thus W is the foot of theperpendicular from Z to Z0Z1.
From this, as z′+ z = 2w, we have z′ − z = z′ −w− (z−w) =−2(z−w) so
z′ − z =−2ı
[ℑ
z− z0
z1 − z0
](z1 − z0).
As z1 − z0 = kcis α for some k > 0, we then have
z′ − z =−2ı
[ℑ
z− z0
kcis α
]kcis α =−2ı{ℑ[(z− z0)cis (−α)]}cis α
=−[(z− z0)cis (−α)− (z− z0)cis α ]cis α =−(z− z0)+ (z− z0)cis 2α

Sec. 10.4 Sensed angles 153
and so z′ − z0 = (z− z0)cis 2α . Hence
x′ − x0 + ı(y′ − y0) = [x− x0 − ı(y− y0)](cos 2α + ısin2α),
so that
x′ − x0 = cos2α .(x− x0)+ sin2α .(y− y0),
y′ − y0 = sin2α .(x− x0)− cos2α .(y− y0).
We can express this in matrix form as stated.We denote sl by sα ;Z0 as well.
10.4 SENSED ANGLES
10.4.1
Definition . For F ′ = tO,Z0(F ), let I0 = tO,Z0(I). Then if Z1 �= Z0, Z2 �= Z0, we letθ1 = ∠F ′I0Z0Z1 and θ2 = ∠F ′I0Z0Z2. We define the sensed-angle �F Z1Z0Z2 to beθ2 −θ1.
� ��
�
O I
J H1
H2
H3H4
� ��
�
�
�
�
�
Z0 I0
J0
Z1
Z2
θ1
θ2
θ2 −θ1
Figure 10.4.
Sensed angles have the following properties.Throughout Z0 ∼F z0, Z1 ∼F z1, Z2 ∼F z2.
(i) If the points Z1 and Z2 are both distinct from Z0, and φ is the sensed-angle�F Z1Z0Z2, then
Z0Z2F
Z0Z1F
=z2 − z0
z1 − z0=
|Z0,Z2||Z0,Z1|cis φ .
(ii) The sensed-angle �F Z1Z0Z2 is wedge or reflex according as ℑ z2−z0z1−z0
is positive
or negative, and this occurs according as 12 [(y2 − y0)(x1 − x0)− (x2 − x0)(y1 −
y0)] is positive or negative.

154 Complex coordinates; sensed angles; angles between lines Ch. 10
(iii) If the points Z1 and Z2 are both distinct from Z0, then�F Z1Z0Z2 =−�F Z2Z0Z1.
(iv) If Z1,Z2,Z3 are all distinct from Z0, then�F Z1Z0Z2 +�F Z2Z0Z3 = �F Z1Z0Z3.
(v) If φ = �F Z1Z0Z2, then rφ ;Z0([Z0,Z1 ) = [Z0,Z2 .
(vi) In 10.3.1(ii), �F ZZ0Z′ = α .
� ��
�
O I
J H1
H2
H3H4
� ��
�
�
�
�
�
Z0 I0
J0
Z1
Z2
θ1
θ2
φ
� ��
�
O IJ H1
H2
H3H4
� ��
�
�
�
�
�
Z0 I0
J0
Z1
Z2
θ1
θ2
θ2 −θ1�
�Z3
θ3
θ3 −θ2
Figure 10.5.
Proof .(i) For z1 − z0 = |z1 − z0|cis θ1, z2 − z0 = |z2 − z0|cis θ2 and so
z2 − z0
z1 − z0=
|z2 − z0|cis θ2
|z1 − z0|cis θ1=
|z2 − z0||z1 − z0|cis (θ2 −θ1).

Sec. 10.4 Sensed angles 155
(ii) From (i)
ℑz2 − z0
z1 − z0=
|z2 − z0||z1 − z0| sin(θ2 −θ1),
and this is positive or negative according as θ2 −θ1 is wedge or reflex. Moreover
|z1 − z0|2ℑz2 − z0
z1 − z0= ℑ[(z2 − z0)(z1 − z0)] = (y2 − y0)(x1 − x0)− (x2 − x0)(y1 − y0).
(iii) For the first is θ2 −θ1 and the second is θ1 −θ2.(iv) For if θ1 =∠F ′ I0Z0Z1, θ2 = ∠F ′I0Z0Z2, θ3 =∠F ′ I0Z0Z3, then
θ2 −θ1 +(θ3 −θ2) = θ3 −θ1.
(v) For if Z ∈ [Z0,Z1 , then z = z0+ t(z1−z0) = z0+ t|z1 − z0|cis θ1 for some t ≥ 0.Hence rθ2−θ1;Z0(Z) = Z′ where
z′ − z0 = (z− z0)cis (θ2 −θ1) = t|z1 − z0|cis θ1cis (θ2 −θ1) = t|z1 − z0|cis θ2.
Thus Z′ ∈ [Z0,Z2 .(vi) For θ ′ −θ = α .If the points Z1 and Z2 are both distinct from Z0 and φ =�F Z1Z0Z2, then
|Z1,Z2|2 = |Z0,Z1|2 + |Z0,Z2|2 −2|Z0,Z1||Z0,Z2|cosφ .
Proof . For by (i) in the last result,
z2 − z0 =|Z0,Z2||Z0,Z1|(cos φ + ısinφ)(z1 − z0),
so that
z2 − z1 =
[ |Z0,Z2||Z0,Z1|(cosφ + ısinφ)−1
](z1 − z0).
Then
|Z1,Z2|2 ={[ |Z0,Z2|
|Z0,Z1| cosφ −1
]2
+
[ |Z0,Z2||Z0,Z1| sinφ
]2}|Z0,Z1|2,
and the result follows on expanding the right-hand side here.
For a non-collinear triple (Z0,Z1,Z2), let α be the wedge-angle ∠Z1Z0Z2 and φbe the sensed angle �F Z1Z0Z2. Then cosφ = cos α so that |φ |◦ = |α |◦ when φ iswedge, and |φ |◦ = 360−|α |◦ when φ is reflex.
Proof . By the last result,
|Z1,Z2|2 = |Z0,Z1|2 + |Z0,Z2|2 −2|Z0,Z1||Z0,Z2|cosφ ,
while by the cosine rule for a triangle in 9.5.1
|Z1,Z2|2 = |Z0,Z1|2 + |Z0,Z2|2 −2|Z0,Z1||Z0,Z2|cos α .
Hence cosφ = cosα so that sin2 φ = sin2 α and hence sinφ = ±sinα . The resultfollows from 9.3.4 and 9.6.

156 Complex coordinates; sensed angles; angles between lines Ch. 10
10.5 SENSED-AREA
10.5.1
For points Z0 ≡F (x0,y0), Z1 ≡F (x1,y1), Z2 ≡F (x2,y2) such that Z1 �= Z0, Z2 �= Z0,and θ = �F Z1Z0Z2 we have
(i)12 |Z0,Z1||Z0,Z2| sinθ = 1
2 [(x1 − x0)(y2 − y0)− (x2 − x0)(y1 − y0)],
(ii)12 |Z0,Z1||Z0,Z2|cosθ = 1
2 [(x1 − x0)(x2 − x0)+ (y1 − y0)(y2 − y0)].
Proof . By 8.3 and 9.2.2, if k1 = |Z0,Z1|, k2 = |Z0,Z2|, then
x1 − x0 = k1 cosθ1, y1 − y0 = k1 sin θ1,
x2 − x0 = k2 cosθ2, y2 − y0 = k2 sin θ2.
Then by 9.3.3 and 9.3.4,
k1k2 sin(θ2 −θ1) = k2 sinθ2k1 cosθ1 − k2 cosθ2k1 sinθ1
= (y2 − y0)(x1 − x0)− (x2 − x0)(y1 − y0).
Similarly
k1k2 cos(θ2 −θ1) = k2 cosθ2k1 cosθ1 + k2 sin θ2k1 sinθ1
= (x2 − x0)(x1 − x0)+ (y2 − y0)(y1 − y0).
10.5.2 Sensed-area of a triangle
For an ordered triple of points (Z1,Z2,Z3) of points and a frame of reference F , ifZ1 ≡F (x1,y1), Z2 ≡F (x2,y2) and Z3 ≡F (x3,y3), we recall from 6.6.2 and 10.5.1(i)δF (Z1,Z2,Z3) defined by the formula
δF (Z1,Z2,Z3) =12 [x1(y2 − y3)− y1(x2 − x3)+ x2y3 − x3y2]
= 12 [(x2 − x1)(y3 − y1)− (x3 − x1)(y2 − y1)]
=12
det
⎛⎝ x1 y1 1
x2 y2 1x3 y3 1
⎞⎠ .
By 6.6.2, when Z1,Z2,Z3 are non-collinear |δF (Z1,Z2,Z3)| is equal to the area of thetriangle [Z1,Z2,Z3]. In this case we refer to δF (Z1,Z2,Z3) as the sensed-area of thetriangle [Z1,Z2,Z3], with the order of vertices (Z1,Z2,Z3). This was first introducedby Möbius in 1827.

Sec. 10.5 Sensed-area 157
Note that
δF (Z1,Z2,Z3) = δF (Z2,Z3,Z1) = δF (Z3,Z1,Z2)
=−δF (Z1,Z3,Z2) =−δF (Z2,Z1,Z3) =−δF (Z3,Z2,Z1),
so that its value is unchanged if Z1,Z2,Z3 are permuted cyclically, and its value ismultiplied by −1 if the order of these is changed.
We note also that 10.4.1(ii) can be restated as that the sensed-angle �F Z1Z0Z2 iswedge or reflex according as
ℑz2 − z0
z1 − z0= ℑ
Z0Z2F
Z0Z1F
is positive or negative, and this occurs according as δF (Z0,Z1,Z2) is positive or neg-ative.
10.5.3 A basic feature of sensed-area
A basic feature of sensed-area is given by the following. Let the points Z3 ≡ (x3,y3),Z4 ≡ (x4,y4), Z5 ≡ (x5,y5) be such that
x3 = (1− s)x4 + sx5, y3 = (1− s)y4 + sy5,
for some s ∈ R. Then for all Z1,Z2,
δF (Z1,Z2,Z3) = (1− s)δF (Z1,Z2,Z4)+ sδF (Z1,Z2,Z5).
For
δF (Z1,Z2,Z3) =12
det
⎛⎝ x1 y1 1
x2 y2 1(1− s)x4 + sx5 (1− s)y4 + sy5 (1− s)+ s
⎞⎠
=12
det
⎛⎝ x1 y1 1
x2 y2 1(1− s)x4 (1− s)y4 1− s
⎞⎠+
12
det
⎛⎝ x1 y1 1
x2 y2 1sx5 sy5 s
⎞⎠
=12(1− s)det
⎛⎝ x1 y1 1
x2 y2 1x4 y4 1
⎞⎠+
12
sdet
⎛⎝ x1 y1 1
x2 y2 1x5 y5 1
⎞⎠
= (1− s)δF (Z1,Z2,Z4)+ sδF (Z1,Z2,Z5).
10.5.4 An identity for sensed-area
An identity that we have for sensed-area is that for any points Z1,Z2,Z3,Z4,
δF (Z4,Z2,Z3)+δF (Z4,Z3,Z1)+δF (Z4,Z1,Z2) = δF (Z1,Z2,Z3).

158 Complex coordinates; sensed angles; angles between lines Ch. 10
For the left-hand side here is equal to
12
det
⎛⎝ x4 y4 1
x2 y2 1x3 y3 1
⎞⎠+
12
det
⎛⎝ x4 y4 1
x3 y3 1x1 y1 1
⎞⎠+
12
det
⎛⎝ x4 y4 1
x1 y1 1x2 y2 1
⎞⎠
=12
det
⎛⎝ x4 y4 1
x2 y2 1x3 y3 1
⎞⎠− 1
2det
⎛⎝ x4 y4 1
x1 y1 1x3 y3 1
⎞⎠+
12
det
⎛⎝ x4 y4 1
x1 y1 1x2 y2 1
⎞⎠
=12
det
⎛⎝ x4 y4 1
x2 − x1 y2 − y1 0x3 y3 1
⎞⎠+
12
det
⎛⎝ x4 y4 1
x1 y1 1x2 y2 1
⎞⎠
=12
det
⎛⎝ x4 y4 1
x2 − x1 y2 − y1 0x3 y3 1
⎞⎠+
12
det
⎛⎝ x4 y4 1
x1 y1 1x2 − x1 y2 − y1 0
⎞⎠
=12
det
⎛⎝ x4 y4 1
x2 − x1 y2 − y1 0x3 y3 1
⎞⎠− 1
2det
⎛⎝ x4 y4 1
x2 − x1 y2 − y1 0x1 y1 1
⎞⎠
=12
det
⎛⎝ x4 y4 1
x2 − x1 y2 − y1 0x3 − x1 y3 − y1 0
⎞⎠
=12
det
⎛⎝ x1 y1 1
x2 − x1 y2 − y1 0x3 − x1 y3 − y1 0
⎞⎠=
12
det
⎛⎝ x1 y1 1
x2 y2 1x3 y3 1
⎞⎠ ,
and this is equal to the right-hand side. This was first proved by Möbius.
10.6 ISOMETRIES AS COMPOSITIONS
10.6.1
� ��
�
O I
J
H1
H2
H3H4
� ��
�
�
�
�
�
Z0 I0
J0
Z1Z2
Figure 10.6.
� ��
�
O I
J
H1
H2
H3H4
� ��
�
�
�
�
�
Z0 I0
J0
Z1
Z2

Sec. 10.6 Isometries as compositions 159
Let F = ([O, I , [O,J ) and F1 = ([Z0,Z1 , [Z0,Z2 ) be frames of reference. LettO,Z0(I) = I0, tO,Z0(J) = J0, F ′ = ([Z0, I0 , [Z0,J0 ) and α = ∠F ′I0Z0Z1. Then thereis a unique isometry g such that
g([O, I ) = [Z0,Z1 , g([O,J ) = [Z0,Z2 .
When �F Z1Z0Z2 is a wedge-angle and so is a right-angle 90F ′ ,
g = rα ;Z0 ◦ tO,Z0 .
When �F Z1Z0Z2 is a reflex-angle 270F ′ and so its co-supported angle is a right-angle,
g = s 12 α ;Z0
◦ tO,Z0 .
Proof . Without loss of generality we take |O, I|= |O,J|= |Z0,Z1|= |Z0,Z2|= 1.Let Z0 ∼F z0, Z1 ∼F z1, Z2 ∼F z2 and note that I ∼F 1, J ∼F ı, z1 − z0 = cis α . AsZ0Z1 ⊥ Z0Z2, by 10.1.1(vi) we have
z2 − z0 = ı(z1 − z0) when �F Z1Z0Z2 is a wedge-angle, (10.6.1)
and
z2 − z0 =−ı(z1 − z0) when �F Z1Z0Z2 is a reflex-angle. (10.6.2)
In case (10.6.1) we take the transformation Z′ = g(Z) where
z′ = z0 + zcis α = z0 +(z+ z0 − z0)cis α .
Then for z = t ≥ 0, z′ = z0 + t(z1 − z0) so g([O, I ) = [Z0,Z1 . Similarly for z = ıt (t ≥0), z′ = z0 + t(z2 − z0) so g([O,J ) = [Z0,Z2 .
In case (10.6.2) we take the transformation Z′ = g(Z) where
z′ = z0 + zcis α = z0 +(z+ z0 − z0)cis α .
Then for z = t ≥ 0, z′ = z0 + t(z1 − z0) so g([O, I ) = [Z0,Z1 . Similarly for z = ıt (t ≥0), z′ = z0 + t(z2 − z0) so g([O,J ) = [Z0,Z2 .
This establishes the existence of g. As to uniqueness, suppose that f is also anisometry such that f (F ) = F1. Then by 8.2.1(xii), if Z ∼F z we have f (Z) ∼F1
z, g(Z)∼F1 z, and so f (Z) = g(Z) for all Z ∈ Π.
COROLLARY. Let f be any isometry. Then f can be expressed in one or other ofthe forms
(a) f = rα ;Z0 ◦ tO,Z0 , (b) f = s 12 α ;Z0
◦ tO,Z0 .
Proof . In the theorem, take Z0 = f (O), Z1 = f (I), Z2 = f (J) and consequently fis equal to the function g as defined in the proof.

160 Complex coordinates; sensed angles; angles between lines Ch. 10
10.7 ORIENTATION OF A TRIPLE OF NON-COLLINEAR POINTS
10.7.1
Definition We say that an ordered triple (Z0,Z1,Z2) of non-collinear points is pos-itively or negatively oriented with respect to F according as the sensed angle�F Z1Z0Z2 is wedge or reflex. By 10.4.1(ii) this occurs according as δF (Z0,Z1,Z2)is positive or negative.
Definition . Let F = ([O, I , [O,J ) and F1 = ([Z0,Z1 , [Z0,Z2 ) be frames ofreference. We say that F1 is positively or negatively oriented with respect to F
according as (Z0,Z1,Z2) is positively or negatively oriented with respect to F .
The special isometries have the following effects on orientation:-
(i) Each translation preserves the orientations with respect to F of allnon-collinear triples.
(ii) Each rotation preserves the orientations with respect to F of all non-collineartriples.
(iii) Each axial symmetry reverses the orientations with respect to F of all non-collinear triples.
Proof .(i) Let f = tZ0,Z1 and Z2 ∼F z2, Z3 ∼F z3, Z4 ∼F z4. Then
z′3 = z3 +(z1 − z0), z′2 = z2 +(z1 − z0),
so that z′3 − z′2 = z3 − z2, and similarly z′4 − z′2 = z4 − z2. Hence
z′4 − z′2z′3 − z′2
=z4 − z2
z3 − z2,
and so by 10.4.1(ii) the result follows.(ii) Let f = rα ;Z0 . Then by 10.3.1
z′2 − z0 = (z2 − z0)cis α , z′3 − z0 = (z3 − z0)cis α ,
and soz′3 − z′2 = (z3 − z2)cis α , z′4 − z′2 = (z4 − z2)cis α .
Hencez′4 − z′2z′3 − z′2
=z4 − z2
z3 − z2,
and so by 10.4.1(ii) the result follows.(iii) Let f = sα ;Z0 . Then by 10.3.2
z′2 − z0 = (z2 − z0)cis 2α , z′3 − z0 = (z3 − z0)cis 2α ,

Sec. 10.7 Orientation of a triple of non-collinear points 161
and soz′3 − z′2 = (z3 − z2)cis 2α , z′4 − z′2 = (z4 − z2)cis 2α .
Hencez′4 − z′2z′3 − z′2
=z4 − z2
z3 − z2,
so that
ℑz′4 − z′2z′3 − z′2
=−ℑz4 − z2
z3 − z2,
and so by 10.4.1(ii) the result follows.
Let F ,F1 be frames of reference and Z3,Z4,Z5 non-collinear points. Let θ =�F Z4Z3Z5 and φ = �F1 Z4Z3Z5. Then |φ |◦ is equal to |θ |◦ or 360−|θ |◦, accordingas F1 is positively or negatively oriented with respect to F .
Proof . We use the notation of 10.6.1. When F1 is positively oriented with respectto F , we recall that for f (Z) = Z′ with z′ = z0 + zcis α , we have f (F ) = F1. Onsolving this for z and then interchanging z and z′, we see that
f−1(Z)∼F (z− z0)cis (−α).
Then by 8.2.1(xii), Z = f ( f−1(Z))∼F1 (z− z0)cis (−α).
Letting Z j ∼F z j, Z′j ∼F1 z′j we then have z′j = (z j − z0)cis (−α). Thus
z′5 − z′3z′4 − z′3
=(z5 − z0)cis (−α)− (z3 − z0)cis (−α)
(z4 − z0)cis (−α)− (z3 − z0)cis (−α)=
z5 − z3
z4 − z3.
But by 10.4.1(i),
z5 − z3
z4 − z3=
|Z3,Z5||Z3,Z4|cis θ ,
z′5 − z′3z′4 − z′3
=|Z3,Z5||Z3,Z4|cis φ .
Thus cis φ = cis θ and so |φ |◦ = |θ |◦.When F1 is negatively oriented with respect to F , we take instead f (Z) = Z′
with z′ = z0 + zcis α . Now f−1(Z)∼F (z− z0)cis α and so
z′5 − z′3z′4 − z′3
=(z5 − z0)cis (α)− (z3 − z0)cis (α)
(z4 − z0)cis (α)− (z3 − z0)cis (α)=
z5 − z3
z4 − z3.
Thus cis φ = cis θ = cis (−θ) and so |φ |◦ = |(−θ)|◦ = 360−|θ |◦.
Let F and F1 be frames of reference. Then the ratios of complex-valued distances
ρ =Z3Z4F
Z1Z2F
, σ =Z3Z4F1
Z1Z2F1
,
defined in 10.2.1, satisfy σ = ρ when F1 is positively oriented with respect to F ,and σ = ρ when F1 is negatively oriented with respect to F .

162 Complex coordinates; sensed angles; angles between lines Ch. 10
Proof We use the notation of 10.6.1. In the case (10.6.1) z′ = z0 + zcis α so that
σ =z′4 − z′3z′2 − z′1
=(z4 − z3)cis α(z2 − z1)cis α
= ρ .
In the case (10.6.2) z′ = z0 + zcis α so that
σ =z′4 − z′3z′2 − z′1
=(z4 − z3)cis α(z2 − z1)cis α
= ρ.
10.8 SENSED ANGLES OF TRIANGLES,THE SINE RULE
10.8.1
Definition . For any non-full angle θ , we denote by θF the angle in A (F ) such that|θF |◦ = |θ |◦.
� ��
�
O I
J H1
H2
H3H4
�
�
�
�
�
� Z1
Z2
Z3
|β |◦
|α |◦|γ |◦
a
c
b
Figure 10.7.
� ��
�
O I
J H1
H2
H3H4
�
�
�
�
�
� Z1
Z3
Z2
|γ |◦
|α |◦
|β |◦
a
c
b
NOTATION. For non-collinear points Z1,Z2,Z3, we use as standard notation
|Z2,Z3|= a, |Z3,Z1|= b, |Z1,Z2|= c,
u =bc, v =
ca, w =
ab,
α =�F Z2Z1Z3, β = �F Z3Z2Z1, γ =�F Z1Z3Z2.
Note that by comparison with 9.5.1 we are now using sensed-angles instead of wedge-angles.

Sec. 10.8 Sensed angles of triangles, the sine rule 163
For non-collinear points Z1,Z2,Z3 if
α = �F Z2Z1Z3, β = �F Z3Z2Z1, γ = �F Z1Z3Z2,
and θ = αF , φ = βF , ψ = γF , then θ +φ +ψ = 180F .Proof . For
z3 − z1
z2 − z1=
bc
cis θ ,z1 − z2
z3 − z2=
ca
cis φ ,z2 − z3
z1 − z3=
ab
cis ψ .
On multiplying these together, we find that
−1 = cis θ .cis φ .cis ψ = cis (θ +φ +ψ).
As cis 180F =−1 it follows that θ +φ +ψ = 180F .With the above notation, the lengths of the sides and the sensed-angles of a trian-
gle [Z1,Z2,Z3] have the properties:-
(i) In each case
vcis β =1
1−ucis α,
and two pairs of similar identities obtained from these on advancing cyclicallythrough (u,v,w) and (α ,β ,γ).
(ii) In each case
c = bcos α +acosβ ,sinα
a=
sinβb
,
and two pairs of similar identities obtained from these on advancing cyclicallythrough (a,b,c) and (α ,β ,γ).
Proof .(i) For z3 − z1 = ucis α .(z2 − z1) so that z3 − z2 = (1 − ucis α)(z1 − z2), while
z1 − z2 = vcis β .(z3 − z2), which give (1−ucis α)vcis β = 1.(ii) From (i)
1−u[cosα + ısinα ] =1v[cos β − ısinβ ],
so equating real parts gives c = bcos α + acos β , while equating imaginary partsgives sinα/a = sinβ/b.
This result re-derives the sine rule for a triangle.
If Z1,Z2,Z3 are distinct points, then
Z3Z1F
Z3Z2F
+Z2Z1F
Z2Z3F
= 1.
Proof . Forz1 − z3
z2 − z3+
z1 − z2
z3 − z2= 1.

164 Complex coordinates; sensed angles; angles between lines Ch. 10
10.9 SOME RESULTS ON CIRCLES
10.9.1 A necessary condition to lie on a circle
In this section we provide some results on circles which are conveniently provedusing complex coordinates.Let Z1,Z2 be fixed distinctpoints, and Z a variable point,all on the circle C (Z0;k).Let F ′ = tO,Z0(F ) andα =∠F ′I0Z0Z1, β =∠F ′I0Z0Z2
and γ = 12(β −α). As Z varies
on the circle, in one of the openhalf-planes with edge Z1Z2
the sensed angle �F Z1ZZ2 isequal in measure to γ , whilein the other open half-planewith edge Z1Z2 it is equal inmeasure to γ + 180F ′ . Note that2γ =�F Z1Z0Z2.
� ��
�
O I
J H1
H2
H3H4
� ��
�
�
�
�
�
�
�
Z0 I0
J0
Z1
Z2
Zα
β
Figure 10.8.
Proof . Now z1 − z0 = kcis α , z2 − z0 = kcis β and if θ = �F I0Z0Z, then z− z0 =kcis θ . We write φ = �F Z1ZZ2 so that
z2 − zz1 − z
= lcis φ , where l =|Z,Z2||Z,Z1| .
Then
lcis φ =cis β − cis θcis α − cis θ
,
while on taking complex conjugates here
lcis (−φ) =cis (−β )− cis (−θ)cis (−α)− cis (−θ)
=cis αcis β
cis θ − cis βcis θ − cis α
.
By division
cis 2φ =cis βcis α
= cis (β −α).
Thus 2(cis φ)2 = (cis γ)2 so that cis φ = ±cis γ . Thus either cis φ = cis γ or cis φ =cis (γ +180F ′), and accordingly
ℑz2 − zz1 − z
= l sinγ or ℑz2 − zz1 − z
= l sin(γ +180F ′).
As sinγ > 0, the first of these occurs when Z is in the half-plane with edge Z1Z2 inwhich ℑ z2−z
z1−z > 0, and the second when Z is in the half-plane with edge Z1Z2 in which
ℑ z2−zz1−z < 0.

Sec. 10.9 Some results on circles 165
10.9.2 A sufficient condition to lie on a circle
Let Z1,Z2 be fixed distinct pointsand Z a variable point. As Zvaries in one of the half-planeswith edge Z1Z2, for the sensedangle θ = �F Z1ZZ2 let |θ |◦ =|γ |◦ where γ is a fixed non-null and non-straight angle inA (F ′), while as Z varies in theother half-plane with edge Z1Z2,let |θ |◦ = |γ +180F ′ |◦. Then Zlies on a circle which passesthrough Z1 and Z2.
� ��
�
O I
J H1
H2
H3H4
� ��
�
�
�
�
�
�
�
Z0 I0
J0
Z1
Z2
Z
Figure 10.9.
Proof . We havez2 − zz1 − z
= tcis γ
for some t ∈ R\{0}. Then
z =z2 − tz1cis γ
1− tcis γso that with cotγ = cosγ/sin γ ,
z− 12(z1 + z2)− 1
2ıcot γ .(z2 − z1)
=z2 − tz1cis γ
1− tcis γ− 1
2(z1 + z2)− 1
2icotγ .(z2 − z1)
=12(z2 − z1)[1+ tcis γ − ıcotγ(1− tcis γ)]
1− tcis γ
=12(z2 − z1)[sin γ(1+ tcis γ)− ıcosγ(1− tcis γ)]
sin γ(1− tcis γ)
=12(z2 − z1)[sin γ + ı(t − cosγ)]
sinγ(1− tcis γ)
and this has absolute value |z2 − z1|2|sin γ | .
This shows that Z lies on a circle, the centre and length of radius of which are evident.
10.9.3 Complex cross-ratio
Let Z2,Z3,Z4 be non-collinear points and C the circle that contains them. Then Z �∈Z3Z4 lies in C if and only if
ℑ(z− z3)(z2 − z4)
(z− z4)(z2 − z3)= 0.
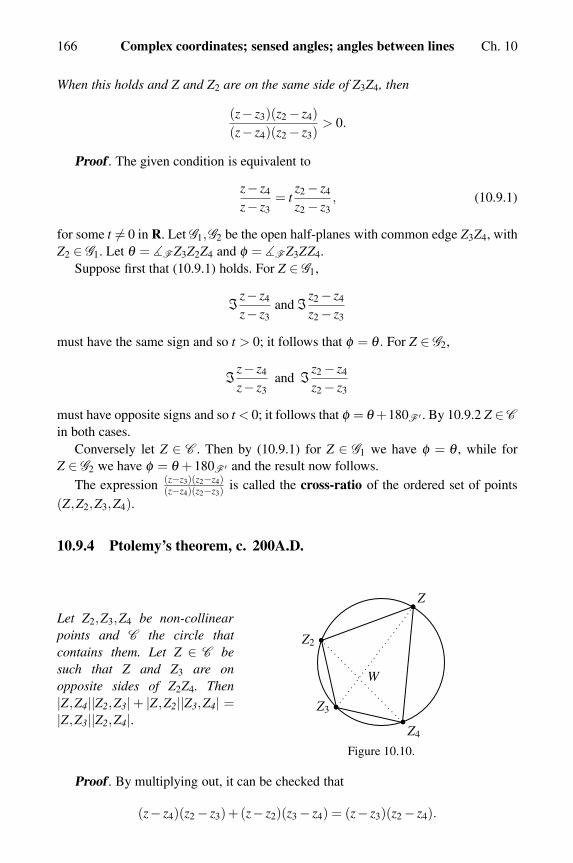
166 Complex coordinates; sensed angles; angles between lines Ch. 10
When this holds and Z and Z2 are on the same side of Z3Z4, then
(z− z3)(z2 − z4)
(z− z4)(z2 − z3)> 0.
Proof . The given condition is equivalent to
z− z4
z− z3= t
z2 − z4
z2 − z3, (10.9.1)
for some t �= 0 in R. Let G1,G2 be the open half-planes with common edge Z3Z4, withZ2 ∈ G1. Let θ = �F Z3Z2Z4 and φ = �F Z3ZZ4.
Suppose first that (10.9.1) holds. For Z ∈ G1,
ℑz− z4
z− z3and ℑ
z2 − z4
z2 − z3
must have the same sign and so t > 0; it follows that φ = θ . For Z ∈ G2,
ℑz− z4
z− z3and ℑ
z2 − z4
z2 − z3
must have opposite signs and so t < 0; it follows that φ = θ +180F ′ . By 10.9.2 Z ∈C
in both cases.Conversely let Z ∈ C . Then by (10.9.1) for Z ∈ G1 we have φ = θ , while for
Z ∈ G2 we have φ = θ +180F ′ and the result now follows.The expression (z−z3)(z2−z4)
(z−z4)(z2−z3)is called the cross-ratio of the ordered set of points
(Z,Z2,Z3,Z4).
10.9.4 Ptolemy’s theorem, c. 200A.D.
Let Z2,Z3,Z4 be non-collinearpoints and C the circle thatcontains them. Let Z ∈ C besuch that Z and Z3 are onopposite sides of Z2Z4. Then|Z,Z4||Z2,Z3|+ |Z,Z2||Z3,Z4| =|Z,Z3||Z2,Z4|.
�
�
�
�
��
�
�
�
Z
Z2
Z3
Z4
W
Figure 10.10.
Proof . By multiplying out, it can be checked that
(z− z4)(z2 − z3)+ (z− z2)(z3 − z4) = (z− z3)(z2 − z4).

Sec. 10.9 Some results on circles 167
This is an identity due to Euler and from it
(z− z4)(z2 − z3)
(z− z3)(z2 − z4)+
(z− z2)(z4 − z3)
(z− z3)(z4 − z2)= 1. (10.9.2)
By 10.9.3 both fractions on the left are real-valued. As Z and Z3 are on oppositesides of Z2Z4, there is a point W of [Z,Z3] on Z2Z4. Then W is an interior point of thecircle, and so W ∈ [Z2,Z4] as the only points of the line Z2Z4 which are interior to thecircle are in this segment. It follows that Z2 and Z4 are on opposite sides of ZZ3. Then[Z,Z2], [Z3,Z4] are in different closed half-planes with common edge the line ZZ3, sothey have no points in common. It follows that Z and Z2 are on the one side of Z3Z4
so the first of the fractions in (10.9.2) is positive, and so equal to its own absolutevalue. But [Z,Z4] and [Z3,Z2] are in different closed half-planes with common edgeZZ3 so they have no point in common. It follows that Z and Z4 are on the one side ofZ2Z3, so the second fraction in (10.9.2) is positive and so equal to its own absolutevalue. Hence
|(z− z4)(z2 − z3)||(z− z3)(z2 − z4)| +
|(z− z2)(z4 − z3)||(z− z3)(z4 − z2)| = 1.
This is known as Ptolemy’s theoremFrom the original identity (10.9.2) with Z1 replacing Z we can deduce that for four
distinct points Z1,Z2,Z3,Z4
Z1Z4F
Z1Z2F
Z2Z3F
Z2Z4F
+Z1Z2F
Z1Z3F
Z4Z3F
Z4Z2F
= 1.
This can be expanded as
|Z1,Z4||Z1,Z3|cis α
|Z2,Z3||Z2,Z4|cis β +
|Z1,Z2||Z1,Z3|cis γ
|Z4,Z3||Z2,Z4|cis δ = 1,
where
α = �F Z3Z1Z4, β =�F Z4Z2Z3, γ = �F Z3Z1Z2, δ = �F Z4Z2Z3.
From this we have that
|Z1,Z4||Z1,Z3|
|Z2,Z3||Z2,Z4|cis (αF +βF )+
|Z1,Z2||Z1,Z3|
|Z4,Z3||Z2,Z4|cis (γF +δF ) = 1.
We get two relationships on equating the real parts in this and also equating theimaginary parts.
NOTE. For other applications of complex numbers to geometry, see Chapter 11and Hahn [8].

168 Complex coordinates; sensed angles; angles between lines Ch. 10
10.10 ANGLES BETWEEN LINES
10.10.1 Motivation
Since cos(180F +θ) =−cosθ , sin(180F +θ) =−sinθ , we have that tan(180F +θ) = tanθ . Thus results that tanθ is constant do not imply that θ is an angle ofconstant magnitude. To extract more information from such situations, we developnew material. This also deals with the rather abrupt transitions in results such asthose in 10.9.1 and 10.9.2.
10.10.2 Duo-sectors
Let l1, l2 be lines intersecting at a point Z1. When l1 �= l2, let Z2,Z3 ∈ l1 with Z1
between Z2 and Z3, and let Z4,Z5 ∈ l2 with Z1 between Z4 and Z5. Then the union
I R(|Z2Z1Z4)∪I R(|Z3Z1Z5)
we shall call a duo-sector with side-lines l1 and l2; we shall denote it by D1. Similarly
I R(|Z2Z1Z5)∪I R(|Z3Z1Z4)
is also a duo-sector with side-lines l1 and l2, and we shall denote it by D2.
�
�
�
�
�
�
�
�
�
�
Z1
Z2
Z4
Z3
Z5
D1
D1
l1
l2
Figure 10.11.
�
�
�
�
�
�
�
�
�
�
Z1
Z2
Z4
Z3
Z5
l4l3
D1
D1
D2
D2
Figure 10.12.
The mid-line l3 of |Z2Z1Z4 is also the mid-line of |Z3Z1Z5 and it lies entirely in D1.The mid-line l4 of |Z2Z1Z5 is also the mid-line of |Z3Z1Z4 and it lies entirely in D2.We call {l3, l4} the bisectors of the line pair {l1, l2} and use l3 to identify D1, l4 toidentify D2.
In Figure 10.12 suppose that |∠Z2Z1Z4|◦ = |∠Z3Z1Z5|◦ = x and |∠Z4Z1Z3|◦ = ythen we have 2x+2y = 360 and so x+ y = 180. It follows that 1
2x+ 12y = 90 and so
l3 ⊥ l4.WhenδF (Z1,Z2,Z4)> 0 we note that
D1 = {Z ∈ Π : δF (Z1,Z2,Z)δF (Z1,Z4,Z)≤ 0},D2 = {Z ∈ Π : δF (Z1,Z2,Z)δF (Z1,Z4,Z)≥ 0},
and get a similar characterisation when δF (Z1,Z2,Z4)< 0.When l1 = l2, we take D1 = l1; we could also take D2 = Π but do not make any
use of this.
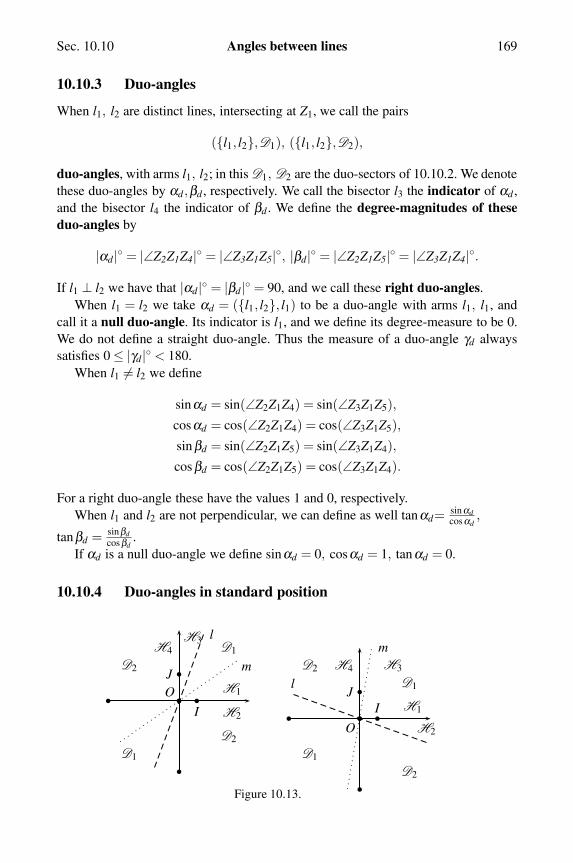
Sec. 10.10 Angles between lines 169
10.10.3 Duo-angles
When l1, l2 are distinct lines, intersecting at Z1, we call the pairs
({l1, l2},D1), ({l1, l2},D2),
duo-angles, with arms l1, l2; in this D1, D2 are the duo-sectors of 10.10.2. We denotethese duo-angles by αd ,βd , respectively. We call the bisector l3 the indicator of αd ,and the bisector l4 the indicator of βd . We define the degree-magnitudes of theseduo-angles by
|αd|◦ = |∠Z2Z1Z4|◦ = |∠Z3Z1Z5|◦, |βd|◦ = |∠Z2Z1Z5|◦ = |∠Z3Z1Z4|◦.
If l1 ⊥ l2 we have that |αd|◦ = |βd|◦ = 90, and we call these right duo-angles.When l1 = l2 we take αd = ({l1, l2}, l1) to be a duo-angle with arms l1, l1, and
call it a null duo-angle. Its indicator is l1, and we define its degree-measure to be 0.We do not define a straight duo-angle. Thus the measure of a duo-angle γd alwayssatisfies 0 ≤ |γd|◦ < 180.
When l1 �= l2 we define
sinαd = sin(∠Z2Z1Z4) = sin(∠Z3Z1Z5),
cosαd = cos(∠Z2Z1Z4) = cos(∠Z3Z1Z5),
sin βd = sin(∠Z2Z1Z5) = sin(∠Z3Z1Z4),
cos βd = cos(∠Z2Z1Z5) = cos(∠Z3Z1Z4).
For a right duo-angle these have the values 1 and 0, respectively.When l1 and l2 are not perpendicular, we can define as well tanαd=
sinαdcosαd
,
tanβd = sinβdcosβd
.If αd is a null duo-angle we define sinαd = 0, cosαd = 1, tan αd = 0.
10.10.4 Duo-angles in standard position
� � �
�
�
�
O
I
JH1
H2
H3H4 D1
D2
D1
D2
l
m
Figure 10.13.
� � �
�
�
�
O
IJ
H1
H2
H3H4
D1
D2
D1
D2
l
m

170 Complex coordinates; sensed angles; angles between lines Ch. 10
We extend our frame of reference F by taking in connection with the line pair{OI,OJ} a canonical pair of duo-sectors D1 and D2, with D1 the union of the firstand third quadrants Q1 and Q3, and D2 the union of the second and fourth quadrants.
For any line l through the origin O, we consider the duo-angle αd with side-linesOI and l, such that the indicator m of αd lies in the duo-sector D1, that is the bisectorof the line-pair {OI, l} which lies in the duo-sector of αd also lies in D1. We denoteby DA (F ) the set of such duo-angles, and we say that they are in standard positionrespect to F .
If l �= OI and Z4 ≡ (x4,y4) is a point other than O on l, then so is the point withcoordinates (−x4,−y4); thus, without loss of generality, we may assume that y4 > 0in identifying l as OZ4. Then Z4 ∈ H1 and
|αd|◦ = |∠IOZ4|◦,cosαd = cos(∠IOZ4) =
x4√x2
4 + y24
,
sinαd = sin(∠IOZ4) =y4√
x24 + y2
4
.
When αd is not a right duo-angle, we have
tanαd =y4
x4.
We identify l = OI as OZ4 where Z4 ≡ (x4,0) and x4 > 0. Thus for the null duo-angle in standard position we have cos αd = 1, sinαd = 0, tanαd = 0. We denote thisnull duo-angle by 0dF and the right duo-angle in standard position by 90dF .
We now note that if αd , βd ∈ DA (F ) and tanαd = tan βd, then αd = βd .
Proof . For this we let αd , βd have pairs of side-lines (OI,OZ4), (OI,OZ5), respec-tively, where |O,Z4|= |O,Z5|= k, and either y4 > 0 or x4 > 0, y4 = 0, and similarlyeither y5 > 0 or x5 > 0, y5 = 0. Then neither αd nor βd is 90dF and
y4
x4=
y5
x5, x2
4 + y24 = x2
5 + y25 = k2.
If y4 = 0 then y5 = 0 and both duo-angles are null. Suppose then that y4 �= 0 sothat y4 > 0; it follows that y5 > 0. Then
k2 = x25 + y2
5 =y2
5
y24
x24 + y2
5 =y2
5
y24
(x24 + y2
4) =y2
5
y24
k2.
Hence y25 = y2
4, and so y5 = y4. It follows that x5 = x4.

Sec. 10.10 Angles between lines 171
10.10.5 Addition of duo-angles in standard position
To deal with addition of duo-angles in standard position, letQ ≡ (k,0), R ≡ (0,k) for somek > 0, and αd have side-linesOQ and OZ4, βd have side-linesOQ and OZ5, where |O,Z4| =|O,Z5| = k and both have theirindicators in D1. Without loss ofgenerality, we may suppose thateither y4 > 0 or y4 = 0, x4 >0, and similarly with respect to(x5,y5).
� � � �
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
Z4
Z5
Z6
O
JQ
I
R
S
T
αd
βd
D1D2
D1D2
Figure 10.14. Addition of duo-angles.
Then the line through Q which is parallel to Z4Z5 will meet the circle C (O;k) in asecond point, which we denote by Z6 ≡ (x6,y6). The line through Q parallel to Z4Z5
has parametric equations
x = k+ t(x5 − x4), y = t(y5 − y4),
and so meets the circle again when t �= 0 satisfies
[k+ t(x5 − x4)]2 +[t(y5 − y4)]
2 = k2.
This yields
t =− 2k(x5 − x4)
(x5 − x4)2 +(y5 − y4)2 ,
and so we find for (x6,y6) that
x6 = k(y5 − y4)
2 − (x5 − x4)2
(x5 − x4)2 +(y5 − y4)2 , y6 =−2k(x5 − x4)(y5 − y4)
(x5 − x4)2 +(y5 − y4)2 . (10.10.1)
We define the sum αd + βd = γd , where γd has side-lines OQ and OZ6 and has itsindicator in D1. When Z4 = Z5 we take QZ6 as the line through Q which is parallel tothe tangent to the circle at Z4. This is analogous to the modified sum of angles.
It can be checked that
y6
k− x5y4 + x4y5
k2 = 0,x6
k− x4x5 − y4y5
k2 = 0. (10.10.2)
To see this we first note that (y5 − y4)2 +(x5 − x4)
2 = 2[k2 − (x4x5 + y4y5)]. Then thenumerator in
(x5 − x4)(y5 − y4)
x4x5 + y4y5 − k2 − x5y4 + x4y5
k2

172 Complex coordinates; sensed angles; angles between lines Ch. 10
is equal to
k2[(x5 − x4)(y5 − y4)+ x5y4 + x4y5]− (x5y4 + x4y5)(x4x5 + y4y5)
= k2(x5y5 + x4y4)− [x4y4(x25 + y2
5)+ x5y5(x24 + y2
4)]
= (k2 − k2)(x5y5 + x4y4) = 0.
Similarly the numerator in
12(y5 − y4)
2 − (x5 − x4)2
k2 − (x4x5 + y4y5)− x4x5 − y4y5
k2
equals
k2[(y5 − y4)2 − (x5 − x4)
2 −2(x4x5 − y4y5)]+2(x4x5 + y4y5)(x4x5 − y4y5)
= k2[y25 + y2
4 − x25 − x2
4]+2(x24x2
5 − y24y2
5)
= k2[y25 + y2
4 − x25 − x2
4]+2[x24(k
2 − y25)− y2
4y25]
= k2[y25 + y2
4 − x25 − x2
4]+2[x24k2 − y2
5(x24 + y2
4)]
= k2[y25 + y2
4 − x25 − x2
4 +2x24 −2y2
5] = 0.
To apply these we note that by 10.10.4
sinαd =y4
k, cos αd =
x4
k, sinβd =
y5
k, cosβd =
x5
k.
The sum γd = αd +βd has side-lines OQ and OZ6, and we sub-divide into two majorcases. First we suppose that x5y4+x4y5 > 0 or equivalently |αd|◦+ |βd|◦ < 180. Theny6 > 0 and we have
sinγd =y6
k, cosγd =
x6
k.
It follows from (10.10.2) that
sin(αd +βd) = sinαd cosβd + cosαd sinβd ,
cos(αd +βd) = cos αd cosβd − sinαd sinβd .
Secondly we suppose that x5y4 + x4y5 < 0 or equivalently |αd|◦ + |βd|◦ > 180.Then y6 < 0 so we have
sinγd =−y6
k, cosγd =−x6
k.
It follows from (10.10.2) that
−sin(αd +βd) = sinαd cosβd + cosαd sinβd,
−cos(αd +βd) = cosαd cosβd − sinαd sinβd.
There is a further case when x5y4 + x4y5 = 0 and we obtain these formulae accordingas x4x5−y4y5 is positive or negative, respectively. Thus the addition formulae for sineand cosine of duo-angles are more complicated than those of angles.

Sec. 10.10 Angles between lines 173
10.10.6 Addition formulae for tangents of duo-angles
(i) We first note that if αd ,βd ∈ DA (F ) and αd + βd = 90dF , neither duo-anglebeing null or right, then tan αd tanβd = 1. For we have that x6 = 0, so that by (10.10.2)x4x5 − y4y5 = 0 and thus
y4
x4
y5
x5= 1.
(ii) Next we note that, as tanαd = sinαd/cos αd , it follows from the above addi-tion formulae for cosine and sine that
tan(αd +βd) =tanαd + tanβd
1− tanαd tanβd,
provided that 0 does not occur in a denominator, that is provided none of αd , βd, αd +βd is a right duo-angle; this can be done separately for the cases considered in 10.10.5.In fact this addition formula for the tangent function can be verified without subdivi-sion into cases, as
y6
x6=−2
(y5 − y4)(x5 − x4)
(y5 − y4)2 − (x5 − x4)2 ,
and we wish to show that this is equal to
y5/x5 + y4/x4
1− y4y5/x4x5=
x4y5 + x5y4
x4x5 − y4y5. (10.10.3)
On subtracting the first of these expressions from the second, we obtain a quotientthe numerator of which is equal to
(x4y5 + x5y4)[(y5 − y4)2 − (x5 − x4)
2]+2(x4x5 − y4y5)(y5 − y4)(x5 − x4)
= (x4y5 + x5y4)[y25 + y2
4 − x25 − x2
4 +2(x4x5 − y4y5)]
+2(x4x5 − y4y5)[x4y4 + x5y5 − (x4y5 + x5y4)]
= (x4y5 + x5y4)[y25 + y2
4 − x25 − x2
4]+2(x4x5 − y4y5)(x4y4 + x5y5)
= (x4y5 + x5y4)[y25 + y2
4 − x25 − x2
4]+2(x24x5y4 − y2
4x4y5 + x25x4y5 − y2
5x5y4)
= (x25 + y2
5 − x24 − y2
4)(x4y5 − x5y4) = 0,
as x24 +y2
4 = x25 +y2
5 = k2. This identity then implies the standard addition formula forthe tangents of duo-angles.
(iii) We also wish to show that
tan(αd +90dF ) =−1
tanαd,
when αd is neither null nor right. For with x5 = 0, y5 = k (10.10.1) gives
x6 = k(k− y4)
2 − x24
x24 +(k− y4)2
, y6 = 2k−x4(k− y4)
x24 +(k− y4)2
,
174 Complex coordinates; sensed angles; angles between lines Ch. 10
so thaty6
x6=
2x4(k− y4)
(k− y4)2 − x24
.
Theny6
x6
y4
x4= 2
y4(k− y4)
k2 −2ky4 + y24 − x2
4
= 2y4(k− y4)
2y44 −2ky4
=−1.
10.10.7 Associativity of addition of duo-angles
With the notation of 10.10.5, suppose that αd , βd and γd are duo-angles in DA (F ),with pairs side- lines (OQ,OZ4), (OQ,OZ5), (OQ,OZ6), respectively. We wish toconsider the sums (αd + βd)+ γd and αd +(βd + γd). We suppose that αd + βd hasside-lines (OQ,OZ7) and that (αd +βd)+ γd has side-lines (OQ,OZ9). Similarly wesuppose that βd + γd has side-lines (OQ,OZ8) and αd +(betad + γd) has side-lines(OQ,OZ10). Then by (10.10.2) applied several times we have that
y7 =x5y4 + x4y5
k, x7 =
x4x5 − y4y5
k,
y9 =x6y7 + x7y6
k=
x6x5y4+x4y5
k + x4x5−y4y5k y6
k
=x6(x5y4 + x4y5)+ (x4x5 − y4y5)y6
k2 ,
x9 =x7x6 − y7y6
k=
x4x5−y4y5k x6 − x5y4+x4y5
k y6
k
=(x4x5 − y4y5)x6 − (x5y4 + x4y5)y6
k2 .
Similarly
y8 =x6y5 + x5y6
k, x8 =
x5x6 − y5y6
k,
y10 =x8y4 + x4y8
k=
x5x6−y5y6k y4 + x4
x6y5+x5y6k
k
=(x5x6 − y5y6)y4 + x4(x6y5 + x5y6)
k2 ,
x10 =x4x8 − y4y8
k=
x4x5x6−y5y6
k − y4x6y5+x5y6
k
k
=x4(x5x6 − y5y6)− y4(x6y5 + x5y6)
k2 .
From these we can see that Z9 = Z10 and so we have that
(αd +βd)+ γd = αd +(βd + γd).
Thus addition of duo-angles is associative on DA (F ).

Sec. 10.10 Angles between lines 175
10.10.8 Group properties of duo-angles; sensed duo-angles
We note the following properties of addition of duo-angles:-(i)Given any duo-angles αd , βd in DA (F ), the sum αd +βd is a unique object
γd and it lies in DA (F ).(ii)Addition of duo-angles is commutative, that is
αd +βd = βd +αd,
for all αd , βd ∈ DA (F ).(iii) Addition of duo-angles is associative on DA (F ).(iv)The null angle 0dF is a neutral element for + on DA (F ).(v)Each αd ∈ DA (F ) has an additive inverse in DA (F ).Proof .(i) This is evident from the definition.(ii) This is evident as the definition is symmetrical in the roles of the two duo-
angles.(iii) This was established in 10.10.7.(iv) For αd +0dF = αd , for all αd ∈ DA (F ).(v) With the notation of 10.10.5 let Z5 = sOJ(Z4) so that Z5 ≡ (−x4,y4), and let δd
be the duo-angle in DA (F ) with arms OI,OZ5. Then, straightforwardly, αd +δd =0dF . Thus this duo-angle δd is an additive inverse for αd in DA (F ). We denote itby −αd.
These properties show that we have a commutative group. We note that
sin(−αd) =y4
k= sinαd , cos(−αd) =−x4
k=−cosαd ,
tan(−αd) =−y4
x4=− tanαd .
If α = ∠F QOZ4 is a wedge-angle in A (F ), with Z4 ≡ (x4,y4) and y4 > 0, werecall that −α = ∠F QOZ6 where Z6 = sOI(Z4) ≡ (x4,−y4). If αd is the duo-anglein DA (F ) with side-lines (OQ,OZ4) then −αd is the duo-angle in DA (F ) withside-lines (OQ,OZ5) where Z5 = sOJ(Z4)≡ (−x4,y4). This inverse angle and inverseduo-angle are linked in that OZ5 = OZ6 and so |−α |◦ = |−αd|◦+180.
We define βd −αd = βd +(−αd), and this is the duo-angle in standard positionwith side-lines OQ and OZ7, where Z7 ≡ (x7,y7) is the point where the line throughQ and parallel to Z5sOJ(Z4) meets the circle C (O;k) again. We call βd −αd the dif-ference of two duo-angles and also a sensed duo-angle with side-lines OZ4,OZ5
and denote it by �F (OZ4,OZ5). If F ′ is any frame of reference obtained from F bytranslation, we also define
�F ′(OZ4,OZ5) = �F (OZ4,OZ5).
Earlier names for this were a ‘complete angle’ and a ‘cross’; see Forder [7] for ap-plications and exercises, and Forder [6, pages 120–121, 151–154] for applications,

176 Complex coordinates; sensed angles; angles between lines Ch. 10
the terminology used being ‘cross’. Sensed duo-angles were also used by Johnson [9,pages 11 –15] under the name of ‘directed angles’.
We have
tan(βd −αd) =tanβd − tanαd
1+ tanαd tanβd,
provided none of αd , βd , βd −αd is a right duo-angle. For a coordinate formula toutilise this we replace x4 by −x4 in (10.10.3) and translate to parallel axes throughZ1. Thus for γd = �F (Z1Z4,Z1Z5) we have
tanγd =
y5−y1x5−x1
− y4−y1x4−x1
1+ y5−y1x5−x1
y4−y1x4−x1
when γd is not right, and
1+y5 − y1
x5 − x1
y4 − y1
x4 − x1= 0
when it is.
10.10.9 An application
For fixed points Z4 and Z5, consider the locus of points Z such that�F (ZZ4,ZZ5) has constant magnitude. If it is a right duo-angle we will have
1+y5 − yx5 − x
y4 − yx4 − x
= 0,
and so the points Z �∈ Z4Z5 lie on the circle on [Z4,Z5] as diameter. Otherwise, wehave that
y5−yx5−x − y4−y
x4−x
1+ y5−yx5−x
y4−yx4−x
= 1−λ ,
for some λ �= 1, and then the points Z �∈ Z4Z5 lie on a circle which passes through Z4
and Z5. In fact we obtain a set of coaxal circles through Z4 and Z5. This should becompared with 7.5.1 and 10.9.1.
10.11 A CASE OF PASCAL’S THEOREM,1640
10.11.1
Let Z1,W1,Z2,W2 be distinct points on the circle C (O;k). Then Z1W2 ‖ W1Z2 if andonly if �F Z2OW2 = �F Z1OW1.
Proof . We let z1 ∼ kcis θ1, z2 ∼ kcis θ2, w1 ∼ kcis φ1, w2 ∼ kcis φ2. Then Z1W2
and W1Z2 are parallel if and only if
kcis φ2 − kcis θ1
kcis θ2 − kcis φ1= t

Sec. 10.11 A case of Pascal’s theorem, 1640 177
for some t �= 0 in R. By 9.4.1 the left-hand side is equal to
cosφ2 − cosθ1 + ı(sinφ2 − sinθ1)
cosθ2 − cosφ1 + ı(sinθ2 − sinφ1)
=−2sin(1
2φ2 +12θ1)sin(1
2 φ2 − 12θ1)+2ıcos(1
2 φ2 +12 θ1)cos(1
2φ2 − 12θ1)
−2sin(12θ2 +
12φ1)sin(1
2 θ2 − 12φ1)+2ıcos(1
2 θ2 +12 φ1)cos(1
2θ2 − 12φ1)
=sin(1
2φ2 − 12θ1)
sin(12θ2 − 1
2φ1)
cis (12φ2 +
12 θ1)
cis (12θ2 +
12 φ1)
=sin(1
2φ2 − 12θ1)
sin(12θ2 − 1
2φ1)cis (1
2φ2 +12θ1 − 1
2θ2 − 12φ1).
Thus
cis (12φ2 +
12θ1 − 1
2θ2 − 12φ1) =
sin(12 θ2 − 1
2φ1)
sin(12 φ2 − 1
2θ1)t.
But the absolute value here is 1, so the right-hand side is ±1. Thus we have either
12φ2 +
12θ1 − 1
2θ2 − 12φ1 = 0F ,
or12φ2 +
12θ1 − 1
2θ2 − 12 φ1 = 180F .
In each case, we have that φ2 −φ1 = θ2 −θ1 and so �F Z2OW2 = �F Z1OW1.
If (Z1,W1), (Z2,W2), (Z3,W3)are distinct pairs of points all ona circle and such that Z1W2 ‖W1Z2 and Z2W3 ‖ W2Z3 thenZ1W3 ‖W1Z3.Proof . This follows immedi-ately from the last subsection. Itis a case of what is known asPascal’s theorem.
Z1 W2
Z3
W1Z2
W3
Figure 10.15. A case of Pascal’s theorem
COROLLARY. If (Z1,W1), (Z2,W2), (Z3,W3), (Z4,W4) are four distinct pairs ofpoints all on a circle and such that
Z1W2 ‖W1Z2, Z2W3 ‖W2Z3, Z3W4 ‖W3Z4,
then Z1W4 ‖W1Z4.
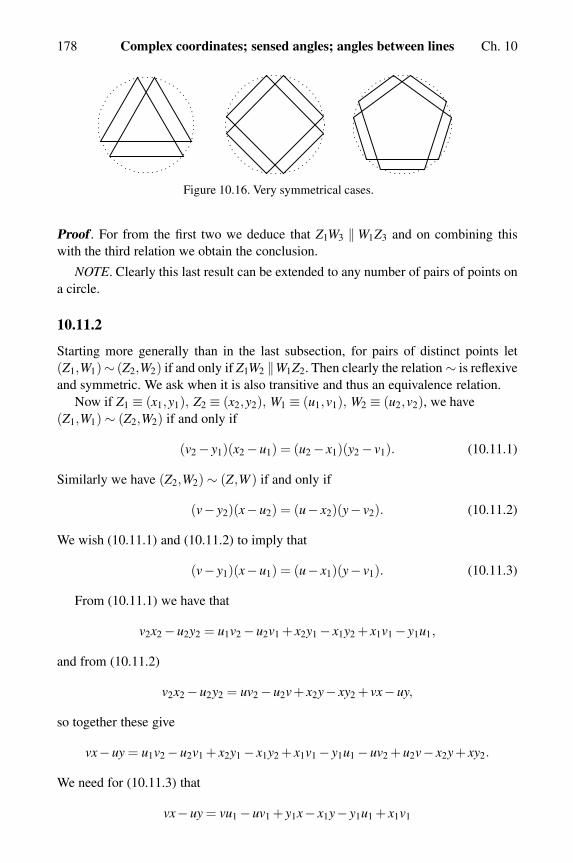
178 Complex coordinates; sensed angles; angles between lines Ch. 10
Figure 10.16. Very symmetrical cases.
Proof . For from the first two we deduce that Z1W3 ‖ W1Z3 and on combining thiswith the third relation we obtain the conclusion.
NOTE. Clearly this last result can be extended to any number of pairs of points ona circle.
10.11.2
Starting more generally than in the last subsection, for pairs of distinct points let(Z1,W1)∼ (Z2,W2) if and only if Z1W2 ‖W1Z2. Then clearly the relation ∼ is reflexiveand symmetric. We ask when it is also transitive and thus an equivalence relation.
Now if Z1 ≡ (x1,y1), Z2 ≡ (x2,y2), W1 ≡ (u1,v1), W2 ≡ (u2,v2), we have(Z1,W1)∼ (Z2,W2) if and only if
(v2 − y1)(x2 −u1) = (u2 − x1)(y2 − v1). (10.11.1)
Similarly we have (Z2,W2)∼ (Z,W ) if and only if
(v− y2)(x−u2) = (u− x2)(y− v2). (10.11.2)
We wish (10.11.1) and (10.11.2) to imply that
(v− y1)(x−u1) = (u− x1)(y− v1). (10.11.3)
From (10.11.1) we have that
v2x2 −u2y2 = u1v2 −u2v1 + x2y1 − x1y2 + x1v1 − y1u1,
and from (10.11.2)
v2x2 −u2y2 = uv2 −u2v+ x2y− xy2 + vx−uy,
so together these give
vx−uy = u1v2 −u2v1 + x2y1 − x1y2 + x1v1 − y1u1 −uv2 +u2v− x2y+ xy2.
We need for (10.11.3) that
vx−uy = vu1 −uv1 + y1x− x1y− y1u1 + x1v1

Sec. 10.11 A case of Pascal’s theorem, 1640 179
and so our condition for transitivity is got by equating the two right- hand sides here.This turns out to be δF (Z1,Z2,Z) = δF (W1,W2,W ).
Now (10.11.2) and (10.11.3) simultaneously give a transformation under whichZ →W as we see by writing them as
v− y2
u− x2=
y− v2
x−u2,
v− y1
u− x1=
y− v1
x−u1. (10.11.4)
On solving for u and v in this we obtain
u =y2 − y1 + x1
y−v1x−u1
− x2y−v2x−u2
y−v1x−u1
− y−v2x−u2
,
v =x2 − x1 + y1
x−u1y−v1
− y2x−u2y−v2
x−u1y−v1
− x−u2y−v2
.
To utilize this transformation we consider loci with equations of the form
2hy− v2
x−u2
y− v1
x−u1+2g
y− v2
x−u2+2 f
y− v1
x−u1+ c = 0. (10.11.5)
Under the transformation this maps into the locus with equation
2hv− y2
u− x2
v− y1
u− x1+2g
v− y2
u− x2+2 f
v− y1
u− x1+ c = 0. (10.11.6)
On clearing the equation (10.11.5) of fractions we obtain
2h(y− v2)(y− v1)+2g(y− v2)(x−u1)+2 f (y− v1)(x−u2)
+ c(x−u1)(x−u2) = 0,
from which we see that W1 and W2 are both on this locus. This equation can be re-arranged as
cx2 +2(g+ f )xy+2hy2 − (2gv2 +2 f v1 + cu1 + cu2)x−(2gu1 +2 f u2 +2hv1 +2hv2)y+2hv1v2 +2gu1v2 +2 f u2v1 + cu1u2 = 0. (10.11.7)
Similarly we see that Z1 and Z2 are on the locus given by (10.11.6), and the equationfor it becomes
cu2 +2(g+ f )uv+2hv2 − (2gy2 +2 f y1 + cx1 + cx2)u−(2gx1 +2 f x2 +2hy1 +2hy2)v+2hy1y2 +2gx1y2 +2 f x2y1 + cx1x2 = 0. (10.11.8)
We note that W1 maps to Z1 and W2 maps to Z2 under the transformation in which Zmaps to W
To identify all the loci that can occur in (10.11.7) and (10.11.8) would take usbeyond the concepts of the present course, so we concentrate on when they representcircles.

180 Complex coordinates; sensed angles; angles between lines Ch. 10
Now (10.11.7) is a circle when c= 2h �= 0 and g=− f . The equation then becomes
x2 + y2 +[g
h(v1 − v2)−u1 −u2
]x+
[gh(u2 −u1)− v1 − v2
]y
+gh(u1v2 −u2v1)+u1u2 + v1v2 = 0. (10.11.9)
This is the set of circles which pass through the points W1 and W2, a set of coaxalcircles. The corresponding equation for the second locus is
u2 + v2 +[g
h(y1 − y2)− x1 − x2
]u+
[gh(x2 − x1)− y1 − y2
]v
+gh(x1y2 − x2y1)+ x1x2 + y1y2 = 0, (10.11.10)
and this gives the set of coaxal circles passing through Z1 and Z2.
We can take an arbitrary circlefrom the first coaxal set and thenthere is a unique one from thesecond set corresponding to it. Ifwe take Z1,Z2,W1,W2 to be con-cyclic we get just one circle andthat is the classical case; it oc-curs when the remaining coeffi-cients in the two equations arepairwise equal.
Z1
Z2
W1
W2
W
Z
Figure 10.17. Pascal result for two circles.
10.11.3
Instead of using parallelism of lines as the basis of the relation in 10.11.2, we couldtake instead a fixed line o with equation lx+my+n = 0, and let (Z1,W1)∼ (Z2,W2)if the lines Z1W2 and W1Z2 meet on o. The results are like those in 10.11.2 and thetransformation corresponding to (10.11.4) is
n(y2 − v)− l(x2v− y2u)n(x2 −u)+m(x2v− y2u)
=n(v2 − y)− l(u2y− v2x)n(u2 − x)+m(u2y− v2x)
,
n(y1 − v)− l(x1v− y1u)n(x1 −u)+m(x1v− y1u)
=n(v1 − y)− l(u1y− v1x)n(u1 − x)+m(u1y− v1x)
.
Exercises
10.1 Prove the result of Varignon (1731) that if A,B,C,D are the vertices of a convexquadrilateral and
P = mp(A,B), Q = mp(B,C), R = mp(C,D), S = mp(D,A),

Sec. 10.11 A case of Pascal’s theorem, 1640 181
then P,Q,R,S are the vertices of a parallelogram.
10.2 If Z1 ∼ z1,Z2 ∼ z2 and Z3 ∼ z3 are non-collinear points show that
z1(z3 − z2)+ z2(z1 − z3)+ z3(z2 − z1) = 4iδF (Z1,Z2,Z3) �= 0.
10.3 Let A ∼ a, B ∼ b, C ∼ c be non-collinear points and P ∼ p a point such thatAP, BP, CP meet BC, CA, AB at D ∼ d, E ∼ e, F ∼ f , respectively. Show forsensed ratio that
BD
DC=
p(b− a)+ p(a−b)+ba−abp(a− c)+ p(c−a)+ac− ca
,
and hence prove Ceva’s theorem that
BD
DC
CE
EA
AF
FB= 1.
10.4 Let A ∼ a, B ∼ b, C ∼ c be non-collinear points. Given any point P ∼ p, showthat as (c−a)/(b−a) is non-real there exist unique real numbers y and z suchthat p− a = y(b− a)+ z(c− a), and so p = xa+ yb+ zc where x+ y+ z = 1.Show that if AP meets BC it is in a point D ∼ d such that
d =1
1+ rb+
r1+ r
c,
where r = z/y. Hence prove Ceva’s theorem that if D ∈ BC, E ∈CA, F ∈ ABare such that AD, BE, CF are concurrent, then
BD
DC
CE
EA
AF
FB= 1.
10.5 Let A ∼ a, B ∼ b, C ∼ c be non-collinear points. If D ∼ d,E ∼ e where
d =1
1+λb+
λ1+λ
c, e =1
1+μc+
μ1+μ
a,
and DE meets AB it is in a point F ∼ f where
f =1
1+νa+
ν1+ν
b,
and λ μν =−1.
Prove Menelaus’ theorem that if D ∈ BC, E ∈CA, F ∈ AB are collinear, then
BD
DC
CE
EA
AF
FB=−1.

182 Complex coordinates; sensed angles; angles between lines Ch. 10
10.6 Let A,B,C be non-collinear points and take D ∈ BC, E ∈CA, F ∈ AB such that
BD
BC= r,
CE
CA= s,
AF
AB= t.
Let l,m,n be, respectively, the lines through D, E, F which are perpendicularto the side-lines BC, CA, AB. Show that l, m, n are concurrent if and only if
(1−2r)|B,C|2 +(1−2s)|C,A|2 +(1−2t)|A,B|2 = 0.
10.7 If R(Z0) is the set of all rotations about the point Z0, show that(R(Z0),◦) is a commutative group.
10.8 Show that the composition of axial symmetries in two parallel lines is equalto a translation, and conversely that each translation can be expressed in thisform.
10.9 Prove that sφ ;Z0 ◦ sθ ;Z0 = r2(φ−θ );Z0.
10.10 Prove that sφ ;Z0 ◦ rθ ;Z0 = sφ− 12 θ ;Z0
. Deduce that any rotation about the point Z0
can be expressed as the composition of two axial symmetries in lines whichpass through Z0.
10.11 Let F1 ∼ F2 if the frame of reference F2 is positively oriented with respectto F1. Show that ∼ is an equivalence relation.
10.12 Prove the Stewart identity
(z4 − z1)2(z3 − z2)+ (z4 − z2)
2(z1 − z3)+ (z4 − z3)2(z2 − z1)
= − (z3 − z2)(z1 − z3)(z2 − z1).
Interpret this trigonometrically.
10.13 Prove DeMoivre’s theorem that
(cosα + ısinα)n = cos(nα)+ ısin(nα),
for all positive integers n and all angles α ∈ A ∗(F ), where ı is the complexnumber satisfying ı2 =−1.
10.14 Suppose that l,m,n are distinct parallel lines. Let Z1,Z2,Z3,Z4 ∈ l with Z1 �=Z2, Z3 �= Z4. Suppose that Z5,Z6 ∈ n, Z1Z5, Z2Z5 meet m at Z7,Z8, respectively,and Z3Z6, Z4Z6 meet m at Z9,Z10, respectively. Prove that then
Z9Z10
Z7Z8=
Z3Z4
Z1Z2.

Sec. 10.11 A case of Pascal’s theorem, 1640 183
10.15 If [Z1,Z2,Z3,Z4] is a parallelogram, W is a point on the diagonal line Z1Z3, aline through W parallel to Z1Z2 meets Z1Z4 and Z2Z3 at W1 and W2 respectively,and a line through W parallel to Z1Z4 meets Z1Z2 and Z3Z4 at W3 and W4,respectively, prove that
δF (W,W4,W1) = δF (W,W3,W2).
10.16 If Z1 �= Z2 and δF (Z1,Z2,Z3) = −δF (Z1,Z2,Z4), prove that the mid-point ofZ3 and Z4 is on Z1Z2.
10.17 Suppose that Z1,Z2,Z3,Z4 are points no three of which are collinear. Show that[Z1,Z3]∩ [Z2,Z4] �= /0 if and only if
δF (Z1,Z2,Z4)
δF (Z3,Z2,Z4)< 0 and
δF (Z2,Z1,Z3)
δF (Z4,Z1,Z3)< 0.

This page intentionally left blank

11
Vector and complex-numbermethods
11.1 EQUIPOLLENCE
11.1.1
Definition . An ordered pair (Z1,Z2) of points in Π is said to be equipollent to the pair(Z3,Z4), written symbolically (Z1,Z2) ↑ (Z3,Z4), if mp(Z1,Z4) = mp(Z2,Z3). Thus ↑is a binary relation in Π×Π.
Equipollence has the properties:-
(i) If Z1 ≡ (x1,y1), Z2 ≡ (x2,y2), Z3 ≡ (x3,y4), Z4 ≡ (x4,y4), then(Z1,Z2) ↑ (Z3,Z4) if and only if x1 + x4 = x2 + x3, y1 + y4 = y2 + y3, or equiv-alently x2 − x1 = x4 − x3, y2 − y1 = y4 − y3.
(ii) Given any points Z1,Z2,Z3 ∈ Π, there is a unique point Z4 such that (Z1,Z2) ↑(Z3,Z4).
(iii) For all Z1,Z2 ∈ Π, (Z1,Z2) ↑ (Z1,Z2).
(iv) If (Z1,Z2) ↑ (Z3,Z4) then (Z3,Z4) ↑ (Z1,Z2).
(v) If (Z1,Z2) ↑ (Z3,Z4) and (Z3,Z4) ↑ (Z5,Z6), then (Z1,Z2) ↑ (Z5,Z6).
(vi) If (Z1,Z2) ↑ (Z3,Z4) then (Z1,Z3) ↑ (Z2,Z4).
(vii) If (Z1,Z2) ↑ (Z3,Z4), then |Z1,Z2|= |Z3,Z4|.
(viii) For all Z1 ∈ Π,(Z1,Z1) ↑ (Z3,Z4) if and only if Z3 = Z4.
(ix) If Z1 �= Z2 and Z3 ∈ l = Z1Z2, then (Z1,Z2) ↑ (Z3,Z4) if and only Z4 ∈ l,|Z1,Z2|= |Z3,Z4| and if ≤l is the natural order for which Z1 ≤l Z2, then Z3 ≤l
Z4.
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50011-2

186 Vector and complex-number methods Ch. 11
(x) If Z1 �= Z2 and Z3 �∈ Z1Z2, then (Z1,Z2) ↑ (Z3,Z4) if and only if[Z1,Z2,Z4,Z3] is a parallelogram.
Proof .(i) By the mid-point formula,
mp(Z1,Z4)≡(
x1 + x4
2,y1 + y4
2
), mp(Z2,Z3)≡
(x2 + x3
2,y2 + y3
2
),
and the result follows immediately from this.(ii) By part (i) it is necessary and sufficient that we choose Z4 so that x4 = x2 +
x3 − x1, y4 = y2 + y3 − y1.(iii) This is immediate as x1 + x2 = x1 + x2, y1 + y2 = y1 + y2.(iv) This is immediate as x2+x3 = x1+x4, y2+y3 = y1+y4. (v) We are given that
x1 + x4 = x2 + x3, y1 + y4 = y2 + y3,
x3 + x6 = x4 + x5, y3 + y6 = y4 + y5.
By addition (x1+x6)+(x3+x4) = (x2+x5)+(x3 +x4), so by cancellation of x3 +x4
we have x1 + x6 = x2 + x5. Similarly y1 + y6 = y2 + y5 and so the result follows.(vi) For by (i) above we have x1 + x4 = x3 + x2, y1 + y4 = y3 + y2.(vii) For by (i) above (x2 − x1)
2 +(y2 − y1)2 = (x4 − x3)
2 +(y4 − y3)2, and now
we apply the distance formula.(viii) For if x1 = x2,y1 = y2, then (i) above is satisfied if and only if x3 = x4,y3 = y4.
� � � � � �
�
�
�
�
Z1Z2
O I
Z3Z4
Figure 11.1.�
�
�
�
�
Z1
Z3Z4
Z2
T
(ix) For suppose first that (Z1,Z2) ↑ (Z3,Z4). Then Z3 ∈ l andmp(Z3,Z4)∈ l, so Z4 ∈ l. By (vii) above we have |Z1,Z2|= |Z3,Z4|. Suppose first thatl is not perpendicular to OI and that, as in 6.4.1(ii), the correspondence between ≤l
and the natural order ≤OI , under which O ≤OI I, is direct. Then πOI(Z1)≤OI πOI(Z2),so x1 ≤ x2. By (i) above x3 ≤ x4, and so by this argument traced in reverse we haveZ3 ≤l Z4. If the correspondence is indirect, we have x2 ≤ x1, x4 ≤ x3 instead. When lis perpendicular to OI, we project to OJ instead and make use of the y-coordinates.
Conversely suppose that Z4 ∈ l, |Z1,Z2| = |Z3,Z4| and Z3 ≤l Z4. Now l has para-metric equations x = x1 + t(x2 − x1), y = y1 + t(y2 − y1) (t ∈ R). Suppose that Z3
and Z4 have parameters t3, t4, respectively, so that
x3 = x1 + t3(x2 − x1), y3 = y1 + t3(y2 − y1),
x4 = x1 + t4(x2 − x1), y4 = y1 + t4(y2 − y1).

Sec. 11.2 Sum of couples, multiplication of a couple by a scalar 187
Recall that Z1,Z2 have parameters 0 and 1 and 0 < 1. As in the last paragraph above,if l is not perpendicular to OI and the correspondence between ≤l and ≤OI is direct,then x1 < x2,x3 < x4; hence t3 < t4 and we obtain this same conclusion when thecorrespondence is inverse. When l is perpendicular to OI we project to OJ instead,and use the y-coordinates. Moreover
|Z3,Z4|2 = [(t4 − t3)(x2 − x1)]2 +[(t4 − t3)(y2 − y1)]
2 = (t4 − t3)2|Z1,Z2|2.
Hence |t4 − t3|= 1, and so as t3 < t4 we have t4 = 1+ t3. Then
x1 + x4 = 2x1 +(1+ t3)(x2 − x1), x2 + x3 = x2 + x1 + t3(x2 − x1)
and these are equal. Similarly
y1 + y4 = 2y1 +(1+ t3)(y2 − y1), y2 + y3 = y2 + y1 + t3(y2 − y1)
and these are equal. By (i) above we now have (Z1,Z2) ↑ (Z3,Z4).(x) If [Z1,Z2,Z4,Z3] is a parallelogram, then mp(Z1,Z4) = mp(Z2,Z3). Conversely
suppose that Z1 �= Z2,Z3 �∈ Z1Z2 and mp(Z1,Z4) = mp(Z2,Z3). Then Z1Z2,Z3Z4 haveequations
−(y2 − y1)(x− x1)+ (x2 − x1)(y− y1) = 0,
−(y4 − y3)(x− x3)+ (x4 − x3)(y− y3) = 0.
By (i) above, x2 −x1 = x4 −x3,y2 −y1 = y4 −y3, so these lines are parallel. SimilarlyZ1Z3,Z2Z4 have equations
−(y3 − y1)(x− x1)+ (x3 − x1)(y− y1) = 0,
−(y4 − y2)(x− x2)+ (x4 − x2)(y− y2) = 0,
and by (i) above x3 − x1 = x4 − x2,y3 − y1 = y4 − y2, so that these lines are parallel.Thus [Z1,Z2,Z4,Z3] is a parallelogram.
11.2 SUM OF COUPLES, MULTIPLICATION OF ACOUPLE BY A SCALAR
11.2.1
�
Z2
OZ1
Z3
T� ��
�
�Z1Z4
O I
(t > 0)
Figure 11.2.
� �
�
�
�
Z1
Z4 O I
(t < 0)

188 Vector and complex-number methods Ch. 11
Definition . For O ∈ Π, let V (Π;O) be the set of all couples (O,Z) for Z ∈ Π. Wedefine the sum (O,Z1) + (O,Z2) of two couples to be (O,Z3) where mp(O,Z3) =mp(Z1,Z2), so that (O,Z1) ↑ (Z2,Z3). Thus + is a binary operation in V (Π;O).
We define the product by a number or scalar t.(O,Z1), of a number t ∈ R anda couple, to be a couple (O,Z4) as follows.When Z1 = O we take Z4 = O for allt ∈ R. When Z1 �= O we take Z4 to be in the line l = OZ1 and with |O,Z4|= |t||O,Z1|;furthermore if ≤l is the natural order for which O ≤l Z1, we take O ≤l Z4 when t ≥ 0,and Z4 ≤l O when t < 0. Thus product by a number is a function on R×V (Π;O)into V (Π;O).
COMMENT. To prove by synthetic means the basic properties of couples listed in11.2.2 and 11.3.1, would be very laborious in covering all the cases. We establish in-stead initial algebraic characterizations which allow an effective algebraic approach.
If O is the origin and Z1 ≡ (x1,y1),Z2 ≡ (x2,y2), then
(i) (O,Z1)+ (O,Z2) = (O,Z3) where Z3 ≡ (x1 + x2,y1 + y2).
(ii) t.(O,Z1) = (O,Z4) where Z4 ≡ (tx1, ty1).
Proof .(i) For this we have 0+ x3 = x1 + x2, 0+ y3 = y1 + y2.(ii) We verify this as follows. Let (x4,y4) = (tx1, ty1). When (x1,y1) = (0,0)
clearly we have (x4,y4) = (x1,y1). When (x1,y1) �= (0,0), clearly Z4 ∈ OZ1 while
|O,Z4|2 = (tx1)2 +(ty1)
2 = t2|O,Z1|2.
Now if l is not perpendicular to OI and the correspondence between the natural order≤l and the natural order ≤OI on OI, under which O ≤OI I, is direct then x1 < x2. Thuswhen t > 0, we have tx1 > 0 and so O ≤l Z4; when t < 0, we have tx1 < 0 and soZ4 ≤l O. When the correspondence between the natural orders is inverse, we reachthe same conclusion. When l is perpendicular to OI we project to OJ instead.
11.2.2 Vector space over R
Definition . A triple (V ,+, .) is said to be a vector space over R if the followinghold:-
(i) First, + is a binary operation in V .
(ii) For all a,b,c ∈ V , (a+b)+ c = a+(b+ c).
(iii) There is an o ∈ V such that for all a ∈ V ,
a+o = a, o+a = a.
(iv) Corresponding to each a ∈ V , there is some −a ∈ V such that
(−a)+a = o, a+(−a) = o.

Sec. 11.2 Sum of couples, multiplication of a couple by a scalar 189
(v) For all a,b ∈ V , a+b = b+a.
(vi) Next, R×V → V is a function.
(vii) For all a ∈ V and all t1, t2 ∈ R, t2.(t1.a) = (t2t1).a.
(viii) For all a,b ∈ V and all t ∈ R, t.(a+b) = t.a+ t.b.
(ix) For all a ∈ V and all t1, , t2 ∈ R, (t1 + t2).a = t1.a+ t2.a.
(x) For all a ∈ V , 1.a = a.
We then have the following result.
(V (Π;O),+, .) is a vector space over R.Proof .(i) This has been covered already in 11.2.1.(ii) Now (O,Z1)+ (O,Z2) = (O,Z4) where (x4,y4) = (x1 + x2,y1 + y2). Then
[(O,Z1)+ (O,Z2)]+ (O,Z3) = (O,Z4)+ (O,Z3) = (O,Z5),
where(x5,y5) = (x4 + x3,y4 + y3) = ((x1 + x2)+ x3,(y1 + y2)+ y3) .
Similarly (O,Z2)+ (O,Z3) = (O,Z6) where (x6,y6) = (x2 + x3,y2 + y3), and so
(O,Z1)+ [(O,Z2)+ (O,Z3)] = (O,Z1)+ (O,Z6) = (O,Z7)
where (x7,y7) = (x1 + x6,y1 + y6) = (x1 +(x2 + x3),y1 +(y2 + y3)). Clearly Z5 = Z7.(iii) For any Z1 ∈ Π,(O,Z1)+(O,O) = (O,Z2) where (x2,y2) = (x1 +0,y1+0) =
(x1,y1), so that Z2 = Z1. Similarly (O,O)+ (O,Z1) = (O,Z3) where (x3,y3) = (0+x1,0+ y1) = (x1,y1), so that Z3 = Z1.
(iv) Now (O,Z1)+(O,Z2) = (O,Z3), (O,Z2)+(O,Z1) = (O,Z4) where (x3,y3) =(x1 + x2,y1 + y2) and (x4,y4) = (x2 + x1,y2 + y1). Clearly Z3 = Z4.
(v) If (x2,y2) = (−x1,−y1), then (O,Z1)+ (O,Z2) = (O,Z3) where(x3,y3) = (x1 − x1,y1 − y1) = (0,0); hence Z3 = O. Similarly (O,Z2) + (O,Z1) =(O,Z4) where (x4,y4) = (−x1 + x1,−y1 + y1) = (0,0); hence Z4 = O.
(vi) This was covered in 11.2.1.(vii) For t1.(O,Z1) = (O,Z2) where (x2,y2) = (t1x1, t1y1). Then
t2.(t1.(O,Z1)) = t2.(O,Z2) = (O,Z3) where (x3,y3) = (t2(t1x1), t2(t1y1)). Also(t2t1).(O,Z1) = (O,Z4) where (x4,y4) = ((t2t1)x1,(t2t1)y1). Thus Z3 = Z4.
(viii) For (O,Z1)+ (O,Z2) = (O,Z3) and t.[(O,Z1)+ (O,Z2)] = t.(O,Z3)= (O,Z4) where (x3,y3) = (x1 + x2,y1 + y2), (x4,y4) = (t(x1 + x2), t(y1 + y2)). Alsot.(O,Z1) = (O,Z5), t.(O,Z2) = (O,Z6) where (x5,y5) = (tx1, ty1),(x6,y6) = (tx2, ty2). Moreover (O,Z5) + (O,Z6) = (O,Z7) where (x7,y7) = (x5 +x6,y5 + y6) = (tx1 + tx2, ty1 + ty2). Hence Z4 = Z7.
(ix) For t1.(O,Z1) = (O,Z2), t2.(O,Z1) = (O,Z3), (t1 + t2).(O,Z1) = (O,Z4) and(O,Z2) + (O,Z3) = (O,Z5) where (x2,y2) = (t1x1, t1y1), (x3,y3) = (t2x1, t2y1) and(x4,y4) = ((t1 + t2)x1,(t1 + t2)y1). Moreover (x5,y5) = (x2 + x3,y2 + y3) = (t1x1 +t2x1, t1y1 + t2y1). Clearly Z4 = Z5.
(x) For 1.(O,Z1) = (O,Z2) where (x2,y2) = (1.x1,1.y1) = (x1,y1). Thus Z2 = Z1.
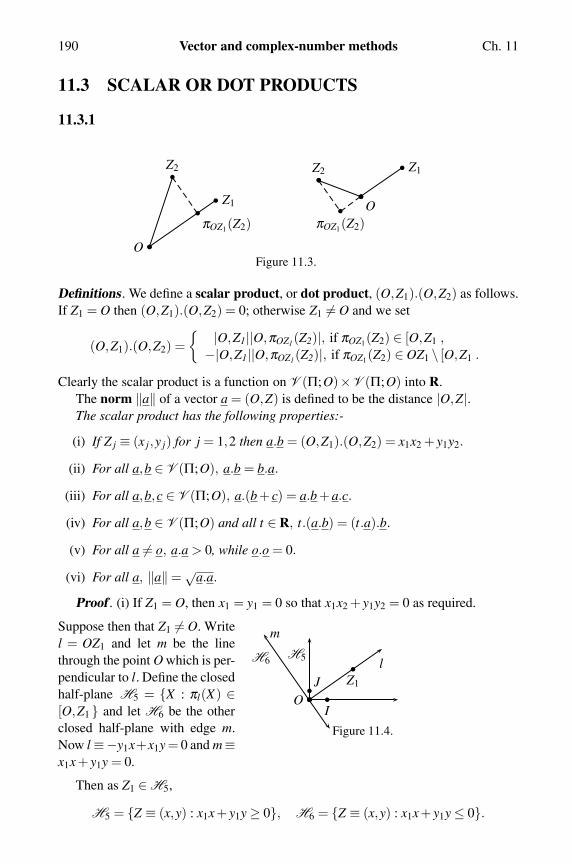
190 Vector and complex-number methods Ch. 11
11.3 SCALAR OR DOT PRODUCTS
11.3.1
�
�
�
�
�
Z2
O
Z1
πOZ1(Z2)
Figure 11.3.
�
�
�
�
�
�
�
Z2
O
Z1
πOZ1(Z2)
Definitions. We define a scalar product, or dot product, (O,Z1).(O,Z2) as follows.If Z1 = O then (O,Z1).(O,Z2) = 0; otherwise Z1 �= O and we set
(O,Z1).(O,Z2) =
{ |O,Z1||O,πOZ1(Z2)|, if πOZ1(Z2) ∈ [O,Z1 ,−|O,Z1||O,πOZ1(Z2)|, if πOZ1(Z2) ∈ OZ1 \ [O,Z1 .
Clearly the scalar product is a function on V (Π;O)×V (Π;O) into R.The norm ‖a‖ of a vector a = (O,Z) is defined to be the distance |O,Z|.The scalar product has the following properties:-
(i) If Z j ≡ (x j,y j) for j = 1,2 then a.b = (O,Z1).(O,Z2) = x1x2 + y1y2.
(ii) For all a,b ∈ V (Π;O), a.b = b.a.
(iii) For all a,b,c ∈ V (Π;O), a.(b+ c) = a.b+a.c.
(iv) For all a,b ∈ V (Π;O) and all t ∈ R, t.(a.b) = (t.a).b.
(v) For all a �= o, a.a > 0, while o.o = 0.
(vi) For all a, ‖a‖=√a.a.
Proof . (i) If Z1 = O, then x1 = y1 = 0 so that x1x2 + y1y2 = 0 as required.
Suppose then that Z1 �= O. Writel = OZ1 and let m be the linethrough the point O which is per-pendicular to l. Define the closedhalf-plane H5 = {X : πl(X) ∈[O,Z1 } and let H6 be the otherclosed half-plane with edge m.Now l ≡−y1x+x1y= 0 and m≡x1x+ y1y = 0.
�
�
� � ��
�
OI
J Z1
l
m
H5H6
Figure 11.4.
Then as Z1 ∈ H5,
H5 = {Z ≡ (x,y) : x1x+ y1y ≥ 0}, H6 = {Z ≡ (x,y) : x1x+ y1y ≤ 0}.

Sec. 11.3 Scalar or dot products 191
But by 6.6.1(ii),
πl(Z2)≡(
x2 +y1
y21 + x2
1
(−y1x2 + x1y2), y2 − x1
y21 + x2
1
(−y1x2 + x1y2)
)
=
(x1
x1x2 + y1y2
x21 + y2
1
, y1x1x2 + y1y2
x21 + y2
1
).
Thus
|O,Z1|2|O,πl(Z2)|2 = (x21 + y2
1)
[x2
1(x1x2 + y1y2)
2
(x21 + y2
1)2
+ y21(x1x2 + y1y2)
2
(x21 + y2
1)2
]= (x1x2 + y1y2)
2,
so that |O,Z1||O,πl(Z2)|= |x1x2 + y1y2|.If Z2 ∈ H5 so that
(O,Z1).(O,Z2) = |O,Z1||O,πl(Z2)|,
and x1x2 + y1y2 ≥ 0 so that |x1x2 + y1y2|= x1x2 + y1y2, clearly(O,Z1).(O,Z2) = x1x2 + y1y2.
If Z2 ∈ H6 \m we have πl(Z2) ∈ l \ [O,Z1 . Then
(O,Z1).(O,Z2) =−|O,Z1||O,πl(Z2)|
and x1x2 + y1y2 ≤ 0, so that |x1x2 + y1y2| = −(x1x2 + y1y2). Clearly again(O,Z1).(O,Z2) = x1x2 + y1y2.
(ii) Let a = (O,Z1), b = (O,Z2). Then by (i) of the present theorem, a.b = x1x2 +y1y2, b.a = x2x1 + y2y1, and clearly these are equal.
(iii) Let a = (O,Z1), b = (O,Z2), c = (O,Z3). Then by 11.2.1(i) b+ c = (O,Z4)where Z4 ≡ (x2 +x3,y2+y3). Then by (i) above a.(b+c) = x1(x2 +x3)+y1(y2 +y3),while a.b+a.c = (x1x2 + y1y2)+ (x1x3 + y1y3), and these are equal.
(iv) Let a = (O,Z1), b = (O,Z2). Then t.(a.b) = t(x1x2 + y1y2). But by 11.2.1(ii),t.a = (O,Z4) where Z4 ≡ (tx1, ty1) and so (t.a).b = (tx1)x2 +(ty1)y2, which is equalto the earlier expression.
(v) If a = (O,Z) then a.a = x2+y2. This is positive when (x,y) �= (0,0), and equalto 0 for x = y = 0.
(vi) This follows immediately.
NOTE. Note that 11.2.2(i) to (v) make (V ,+) a commutative group. In textbookson algebra it is proved that there is not a second element which has the property (iii);we shall refer to o as the null vector. It is also a standard result that for each a ∈ V
there is not a second element with the property (iv); we call −a the inverse of a.Subtraction − is defined by specifying the difference b − a = b+ (−a); then −is a binary operation on V . If a = (O,Z1), b = (O,Z2), then −a = (O,Z3) whereZ3 ≡ (−x1,−y1), and consequently b− a = (O,Z4) where Z4 ≡ (x2 − x1,y2 − y1).Thus (O,Z2)− (O,Z1) = (O,Z4) if and only if (Z1,Z2) ↑ (O,Z4).
192 Vector and complex-number methods Ch. 11
COMMENT. Now that we have set up our couples we call (O,Z) a position vectorwith respect to the point O, and we adopt the standard notation
−→OZ for (O,Z).
Position vectors can be used for many geometrical purposes instead of Cartesiancoordinates, or complex coordinates and complex-valued distances. We would notethat by 6.1.1(iv) and 11.2 Z0 = mp(Z1,Z2) if and only if
−−→OZ0 = 1
2(−−→OZ1 +
−−→OZ2); by
10.1.1(v) that Z1Z2 ‖ Z3Z4 if and only if−−→OZ4 −−−→
OZ3 = t(−−→OZ2 −−−→
OZ1) for some t �= 0in R, and by 9.7.1(ii) and 6.5.1 Corollary (ii) that Z1Z2 ⊥ Z3Z4 if and only if (
−−→OZ1 −−−→
OZ2).(−−→OZ3 −−−→
OZ4) = 0. Most importantly, from parametric equations of a line x =x1 + t(x2 − x1), y = y1 + t(y2 − y1) (t ∈ R), we have that Z ∈ Z1Z2 if and only if
−→OZ =
−−→OZ1 + t(
−−→OZ2 −−−→
OZ1) = (1− t)−−→OZ1 + t
−−→OZ2 (11.3.1)
for some t ∈ R.
COMMENT. It is usual, in modern treatments, to define vectors to be the equiv-alence classes for equipollence. This defines free vectors. Position vectors are thendefined by taking a specific point O in Π so that we have a pointed plane, and thenconcentrating on the representatives of the form (O,Z) for the vectors. But if ourobjective is to introduce position vectors, it is wasteful of effort to set up the freevectors, and in fact the use of free vectors and subsequent specialisation to positionvectors can be a confusing route to position vectors.
11.4 COMPONENTS OF A VECTOR
11.4.1 Components
Given non-collinear points Z1,Z2,Z3, we wish to obtain an expression
−−→Z1Z = p
−−→Z1Z2 +q
−−→Z1Z3.
For this we need
(x2 − x1)p+(x3 − x1)q = x− x1,
(y2 − y1)p+(y3 − y1)q = y− y1.
We obtain the solutions
p =δF (Z1,Z,Z3)
δF (Z1,Z2,Z3), q =
δF (Z1,Z2,Z)δF (Z1,Z2,Z3)
,
and so have−−→Z1Z =
δF (Z1,Z,Z3)
δF (Z1,Z2,Z3)
−−→Z1Z2 +
δF (Z1,Z2,Z)δF (Z1,Z2,Z3)
−−→Z1Z3.

Sec. 11.4 Components of a vector 193
11.4.2 Areal coordinates
Given non-collinear points Z1,Z2,Z3, the position vector of any point Z of the planecan be expressed in the form
−→OZ = p
−−→OZ1+q
−−→OZ2 + r
−−→OZ3, with p+q+ r = 1. This is
equivalent to having q, r such that
q(x2 − x1)+ r(x3 − x1) = x− x1,
q(y2 − y1)+ r(y3 − y1) = y− y1.
These equations have the unique solution
q =δF (Z,Z3,Z1)
δF (Z1,Z2,Z3), r =
δF (Z,Z1,Z2)
δF (Z1,Z2,Z3),
and now we take p = 1−q− r so that by 10.5.4
p =δF (Z,Z2,Z3)
δF (Z1,Z2,Z3).
For non-collinear points Z1,Z2,Z3, for any Z we write
α = δF (Z,Z2,Z3), β = δF (Z,Z3,Z1), γ = δF (Z,Z1,Z2),
and call (α ,β ,γ) areal point coordinates of Z with respect to (Z1,Z2,Z3). Note thatwe have
p =α
δF (Z1,Z2,Z3), q =
βδF (Z1,Z2,Z3)
, r =γ
δF (Z1,Z2,Z3),
and α +β + γ = δF (Z1,Z2,Z3). These were first used by Möbius in 1827.
11.4.3 Cartesian coordinates from areal coordinates
With the notation in 11.4.2, we have
(y2 − y3)x− (x2 − x3)y = 2α − x2y3 + x3y2,
(y3 − y1)x− (x3 − x1)y = 2β − x3y1 + x1y3,
and if we solve these we obtain
x =x1α + x2β + x3γδF (Z1,Z2,Z3)
, y =y1α + y2β + y3γδF (Z1,Z2,Z3)
.
11.4.4
The representation in 11.4.2 is in fact independent of the origin O. For we have
x = px1 +qx2 + rx3, y = py1 +qy2 + ry3,

194 Vector and complex-number methods Ch. 11
and so for any point Z0 ≡F (x0,y0),
x− x0 = p(x1 − x0)+q(x2 − x0)+ r(x3 − x0),
y− y0 = p(y1 − y0)+q(y2 − y0)+ r(y3 − y0).
But Z ≡F ′ (x− x0,y− y0), where F ′ = tO,Z0(F ). Hence−−→Z0Z = p
−−→Z0Z1 + q
−−→Z0Z2 +
r−−→Z0Z3, with p+q+ r = 1.
NOTATION. Where a vector equation is independent of the origin, as in−→OZ =
p−−→OZ1 +q
−−→OZ2 + r
−−→OZ3, with p+q+ r = 1, it is convenient to write this as Z = pZ1 +
qZ2 + rZ3 with p+q+ r = 1. In particular, in (11.3.1) we write Z = (1− t)Z1 + tZ2.
�
�
�
�
�
�
�
�
�
�
�
�
Z1
Z2
Z3
ZO
Figure 11.5.
Figure 11.5 caters for when O and Z1 are taken as origins, a similar diagram wouldcater for when Z0 and Z1 are origins, and then a combination of the two would givethe stated result.
11.4.5
We also use the notation δF (Z1,Z2, pZ4+qZ5+rZ6) for δF (Z1,Z2,Z3) where−−→OZ3 =
p−−→OZ4 +q
−−→OZ5 + r
−−→OZ6 and p+q+ r = 1. We can then write the conclusion of 10.5.3
as
δF (Z1,Z2,(1− s)Z4 + sZ5) = (1− s)δF (Z1,Z2,Z4)+ sδF (Z1,Z2,Z5).
The more general result
δF (Z1,Z2, pZ4 +qZ5 + rZ6)
= pδF (Z1,Z2,Z4)+qδF (Z1,Z2,Z5)+ rδF (Z1,Z2,Z6),

Sec. 11.5 Vector methods in geometry 195
where p+q+ r = 1, can be deduced from this. For
δF (Z1,Z2, pZ4 +qZ5 + rZ6)
= δF
(Z1,Z2, pZ4 +(1− p)
(q
1− pZ5 +
r1− p
Z6
))
= pδF (Z1,Z2,Z4)+ (1− p)δF
(Z1,Z2,
q1− p
Z5 +r
1− pZ6
)
= pδF (Z1,Z2,Z4)+ (1− p)
[q
1− pδF (Z1,Z2,Z5)+
r1− p
δF (Z1,Z2,Z6)
].
In this we have used the fact that
q1− p
+r
1− p=
q+ r1− p
=1− p1− p
= 1.
11.5 VECTOR METHODS IN GEOMETRY
There is an informative account of many of the results of this chapter contained inCoxeter and Greitzer [5], dealt with by the methods of pure geometry.
Some results are very basic, involving just collinearities or concurrencies, or ratioresults. We start by showing how vector notation can be used to prove such results ina very straightforward fashion.
11.5.1 Menelaus’ theorem, c. 100A.D.
On using the notation of senseddistances and sensed ratios in7.6.1, we note that for non-collinear points Z1,Z2 and Z3,let Z4 ∈ Z2Z3, Z5 ∈ Z3Z1 andZ6 ∈ Z1Z2. Then Z4,Z5 and Z6
are collinear if and only if
Z2Z4
Z4Z3
Z3Z5
Z5Z1
Z1Z6
Z6Z2=−1.
Proof . Let Z4 = (1− r)Z2+ rZ3,Z5 = (1− s)Z3 + sZ1,Z6 = (1− t)Z1 + tZ2.
� �
�
�
�
��
�
�
Z1
Z2 Z3Z4
Z5
Z6
Figure 11.6.
Since Z4,Z5 and Z6 are collinear, we have that Z6 = (1−u)Z4 +uZ5, for some realnumber u. Then
(1− t)Z1 + tZ2 = (1−u)[(1− r)Z2 + rZ3]+u[(1− s)Z3 + sZ1].

196 Vector and complex-number methods Ch. 11
As the coefficients on each side add to 1, by the uniqueness in 11.4.2 we can equatecoefficients and thus obtain
1− t = su, t = (1−u)(1− r), r(1−u) =−u(1− s).
On eliminating u we obtain
r1− s
s1− t
t1− r
=− u1−u
1u(1−u) =−1,
and sor
1− rs
1− st
1− t=−1.
This yields the stated result. This is known as Menelaus’ theorem.
11.5.2 Ceva’s theorem and converse, 1678 A.D.
For non-collinear points Z1,Z2 and Z3, let Z4 ∈ Z2Z3, Z5 ∈ Z3Z1 and Z6 ∈ Z1Z2. IfZ1Z4,Z2Z5 and Z3Z6 are concurrent, then
Z2Z4
Z4Z3
Z3Z5
Z5Z1
Z1Z6
Z6Z2= 1. (11.5.1)
Proof . Denoting the point of concurrency by Z0, we have
Z4 = (1−u)Z0 +uZ1 = (1− r)Z2 + rZ3,
Z5 = (1− v)Z0 + vZ2 = (1− s)Z3 + sZ1,
Z6 = (1−w)Z0 +wZ3 = (1− t)Z1 + tZ2,
for some u,v,w,r,s, t ∈ R. Then
Z0 =− u1−u
Z1 +1− r1−u
Z2 +r
1−uZ3,
Z0 =s
1− vZ1 − v
1− vZ2 +
1− s1− v
Z3,
Z0 =1− t1−w
Z1 +t
1−wZ2 − w
1−wZ3.
On equating the coefficients ofZ1,Z2 and Z3, in turn, we obtain
− u1−u
=s
1− v=
1− t1−w
,
1− r1−u
=− v1− v
=t
1−w,
r1−u
=1− s1− v
=− w1−w
.
� �
�
�
�
�
��
�
�
�
Z1
Z2 Z3Z4
Z5Z6
Figure 11.7.

Sec. 11.5 Vector methods in geometry 197
From thiss
1− t=
1− v1−w
,t
1− r=
1−w1−u
,r
1− s=
1−u1− v
,
and so by multiplications
1− tt
1− rr
1− s= 1.
Thus we obtain our conclusion. This is known as Ceva’s theorem.In fact we also have that
us=−1−u
1− v,
vt=− 1− v
1−w,
wr=−1−w
1−u,
which gives uvw =−rst. This is
Z0Z4
Z0Z1
Z0Z5
Z0Z2
Z0Z6
Z0Z3=−Z2Z4
Z2Z3
Z3Z5
Z3Z1
Z1Z6
Z1Z2.
CONVERSE of Ceva’s theorem. Conversely, for non-collinear points Z1,Z2
and Z3, let Z4 ∈ Z2Z3, Z5 ∈ Z3Z1 and Z6 ∈ Z1Z2. If (11.5.1) holds and Z2Z5 and Z3Z6
meet at a point Z0, then Z1Z4 also passes through Z0.To start our proof we note that we have
Z5 = (1− v)Z0 + vZ2 = (1− s)Z3 + sZ1,
Z6 = (1−w)Z0 +wZ3 = (1− t)Z1 + tZ2.
Hence
Z0 =s
1− vZ1 − v
1− vZ2 +
1− s1− v
Z3, Z0 =1− t1−w
Z1 +t
1−wZ2 − w
1−wZ3.
It follows that
s1− v
=1− t1−w
, − v1− v
=t
1−w,
1− s1− v
=− w1−w
,
from whichs
1− t=
1− v1−w
, (1− s)t = vw.
On eliminating s between these, we obtain (1− v)t2 +(v−w)t − vw(1−w) = 0. Wethen obtain two pairs of solutions, t = w, s = 1− v, and
t =−v1−w1− v
, s =1− vw1−w
.
The first pair of solutions leads to v = w = 0 and so Z5 = Z6 = Z0 = Z1, which weregard as a degenerate case.
With Z4 = (1− r)Z2 + rZ3, we are given that
1− rr
=st
(1− s)(1− t),

198 Vector and complex-number methods Ch. 11
and so have
Z4 =st
st +(1− s)(1− t)Z2 +
(1− s)(1− t)st +(1− s)(1− t)
Z3.
With the second pair of solutions above, we obtain that
Z0 =1− vw
(1− v)(1−w)Z1 − v(1−w)
(1− v)(1−w)Z2
w(1− v)(1− v)(1−w)
Z3,
and also that
Z4 =v(1−w)
v+w−2vwZ2 +
w(1− v)v+w−2vw
Z3,
so that
Z0 =1− vw
(1− v)(1−w)Z1 − v+w−2vw
(1− v)(1−w)Z4.
As the sum of the coefficients of Z1 and Z4 is equal to 1, Z1Z4 passes through Z0. Thisproves the result.
To obtain a formula for Z0 we note that on solving the second pair of solutionsabove for v and w, we obtain the pair of solutions
v = 1, w = 1; v =− st1− t
, w =−(1− s)(1− t)s
.
To see this, note that
1−w =−1− vv
t, w = 1+1− v
vt,
so that1− v
(1+ 1−v
v t)
1−vv t
= s, i.e.1− v− (1− v)t
− 1−vv t
= s.
Thus either v = 1 and consequently w = 1, or
1− t− t
v
= s, i.e. v =st
1− t,
and hence
w =−(1− s)(1− t)s
.
The first pair lead to Z5 = Z2,Z6 = Z3, another degenerate case, while the secondpair lead to
Z0 =s(1− t)
1− t + stZ1 +
st1− t + st
Z2 +(1− s)(1− t)
1− t + stZ3. (11.5.2)
Because of the condition (11.5.1) the coefficients in (11.5.2) could be given inseveral different forms.

Sec. 11.5 Vector methods in geometry 199
11.5.3 Desargues’ perspective theorem, 1648 A.D.
Let (Z1,Z2,Z3) and (Z4,Z5,Z6)be two pairs of non-collinearpoints. Let Z2Z3 and Z5Z6 meetat W1, Z3Z1 and Z6Z4 meet at W2,and Z1Z2 and Z4Z5 meet at W3.Then W1,W2,W3 are collinear ifand only if Z1Z4,Z2Z5,Z3Z6 areconcurrent.Proof . Suppose that Z1Z4, Z2Z5,Z3Z6 meet at a point Z0. Then
Z4 = (1−u)Z0 +uZ1,
Z5 = (1− v)Z0 + vZ2,
Z6 = (1−w)Z0 +wZ3,
for some u,v,w,∈ R.
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
Z1
Z2
Z3
Z4
Z5
Z6W1
W2
W3
Figure 11.8.
On eliminating Z0 between the second and third of these, we obtain that
(1−w)Z5 − (1− v)Z6 = v(1−w)Z2 −w(1− v)Z3,
from which we obtain that
1−wv−w
Z5 − 1− vv−w
Z6 =v(1−w)
v−wZ2 − w(1− v)
v−wZ3.
Now the sum of the coefficients of Z5 and Z6 is equal to 1, so the left-hand siderepresents a point on the line Z5Z6. Similarly, the sum of the coefficients of Z2 andZ3 is equal to 1, so the right-hand side represents a point on the line Z2Z3. Thus thismust be the point W1.
By a similar argument based on the third and first lines, we find that
1−uw−u
Z6 − 1−ww−u
Z4 =w(1−u)
w−uZ3 − u(1−w)
w−uZ1
must be the point W2, and by a similar argument based on the first and second lines,we find that
1− vu− v
Z4 − 1−uu− v
Z5 =u(1− v)
u− vZ1 − v(1−u)
u− vZ2
must be the point W3.

200 Vector and complex-number methods Ch. 11
Then by repeated use of 10.5.3 and 11.4.5
δF (W1,W2,W3)
= δF
(v(1−w)
v−wZ2 − w(1− v)
v−wZ3,−u(1−w)
w−uZ1 +
w(1−u)w−u
Z3,
u(1− v)u− v
Z1 − v(1−u)u− v
Z2
)
=
[v(1−w)
v−ww(1−u)
w−uu(1− v)
u− v− w(1− v)
v−w−u(1−w)
w−u−v(1−u)
u− v
]δF (Z1,Z2,Z3)
= 0.
This shows that W1,W2 and W3 are collinear.This is known as Desargues’ perspective or two-triangle theorem.Conversely, let
W1 = (1− l)Z2 + lZ3 = (1−m)Z5 +mZ6,
W2 = (1− p)Z3 + pZ1 = (1−q)Z6 +qZ4,
W3 = (1− r)Z1 + rZ2 = (1− s)Z4 + sZ5.
From the third of these we deduce that (1− r)Z1 − (1− s)Z4 = sZ5 − rZ2, and fromthis
1− rs− r
Z1 − 1− ss− r
Z4 =s
s− rZ5 − r
s− rZ2,
so that this must be the point of intersection of Z1Z4 and Z2Z5.By a similar argument, we deduce from the second equation that
1− lm− l
Z2 − 1−mm− l
Z5 =m
m− lZ6 − l
m− lZ3,
and so this must be the point of intersection of Z2Z5 and Z3Z6. By a similar argument,we deduce from the first equation that
1− pq− p
Z3 − 1− pq− p
Z6 =q
q− pZ4 − p
q− pZ1,
and so this must be the point of intersection of Z3Z6 and Z1Z4.We are given now that W1,W2 and W3 are collinear, so that W3 = (1− t)W1 + tW2,
for some t ∈ R. Then
(1− t)[(1− l)Z2 + lZ3]+ t[(1− p)Z3 + pZ1] = (1− r)Z1 + rZ2,
(1− t)[(1−m)Z5 +mZ6]+ t[(1−q)Z6 +qZ4] = (1− s)Z4 + sZ5.
Since the points Z1,Z2,Z3 are not collinear we can equate the coefficients in the firstline here, and obtain that
pt = 1− r, (1− t)(1− l) = r, (1− t)l + t(1− p) = 0,

Sec. 11.5 Vector methods in geometry 201
and since the points Z4,Z5,Z6 are not collinear we can equate the coefficients in thesecond line, and obtain that
qt = 1− s, (1− t)(1−m) = s, (1− t)m+ t(1−q) = 0.
Now for Z2Z5 and Z3Z6 to meet Z1Z4 in the same point, we need to have
1− rs− r
=− pq− p
,
and from this1− r
p=− s− r
q− p.
But we have from above1− r
p=
1− sq
,
as a common value of t, and so need
1− sq
=− s− rq− p
or equivalently q(1− r) = p(1− s), and we have already noted that this is so.It follows that Z1Z4,Z2Z5 and Z3Z6 are concurrent.
11.5.4 Pappus’ theorem, c. 300A.D.
Let the points Z1,Z2,Z3 lie onone line, and the points Z4,Z5,Z6
lie on a second line, these twolines intersecting at some pointZ0. Suppose that Z2Z6 and Z5Z3
meet at W1, Z3Z4 and Z6Z1
meet at W2, and Z1Z5 and Z4Z2
meet at W3. Then the pointsW1,W2,W3 are collinear.
�
�
�
� � � �
�
��
��
� �
� �
��
�
� �
�
Z1
Z2
Z3
Z4 Z5 Z6
Figure 11.9.
Proof . We have that
Z2 = (1− p)Z0 + pZ1, Z3 = (1−q)Z0 +qZ1,
Z5 = (1−u)Z0 +uZ4, Z6 = (1− v)Z0 + vZ4,
for some p,q,u,v ∈ R. On eliminating Z0 from the equations for Z2 and Z5, we findthat
(1−u)Z2 − (1− p)Z5 = p(1−u)Z1 −u(1− p)Z4,
and so1−u
1− puZ2 +
u(1− p)1− pu
Z4 =p(1−u)1− pu
Z1 +1− p1− pu
Z5.

202 Vector and complex-number methods Ch. 11
This must be the point W3 then. Similarly, on eliminating Z0 from the equations forZ3 and Z6 we have that
(1− v)Z3 − (1−q)Z6 = q(1− v)Z1 − (1−q)vZ4,
and so
1− v1−qv
Z3 +(1−q)v1−qv
Z4 =q(1− v)1−qv
Z1 +1−q1−qv
Z6.
This must be the point W2 then.
Now from the equations for Z2 and Z3 we have that pZ3 − qZ2 = (p− q)Z0, andfrom the equations for Z5 and Z6 we have that uZ6 − vZ5 = (u− v)Z0. On combiningthese, we have that
(v−u)(pZ3 −qZ2) = (q− p)(uZ6 − vZ5).
From this we have that
u(q− p)qv− pu
Z6 +q(v−u)qv− pu
Z2 =p(v−u)qv− pu
Z3 +(q− p)vqv− pu
Z5.
This must then be the point W1.
However, the left-hand sides of the representations for W1,W2 and W3 containfour points Z1,Z2,Z5,Z6 and we wish to reduce this to three non-collinear points.For this purpose we eliminate Z5. From the equations for Z5 and Z6 we have thatuZ6−vZ5 = (u−v)Z0, while from the equation for Z2 we have Z2− pZ1 = (1− p)Z0.Combining these gives
Z5 =uv
Z6 − (u− v)v(1− p)
(Z2 − pZ1).
On substitution, this gives that
W3 =pu(1− v)v(1− pu)
Z1 +v−u
v(1− pu)Z2 +
u(1− p)v(1− pu)
Z6.
We note that the sum of the coefficients for each of W1,W2,W3 in terms of Z1,Z2
and Z6 is equal to 1, and so by repeated use of 10.5.3 and 11.4.5 we have that

Sec. 11.5 Vector methods in geometry 203
δF (W1,W2,W3) is equal to
δF
(q(v−u)qv− pu
Z2 +u(q− p)qv− pu
Z6,q(1− v)1−qv
Z1 +1−q1−qv
Z6,
pu(1− v)v(1− pu)
Z1 +v−u
v(1− pu)Z2 +
u(1− p)v(1− pu)
Z6
)
=q(v−u)qv− pu
q(1− v)1−qv
u(1− p)v(1− pu)
δF (Z2,Z1,Z6)
+q(v−u)qv− pu
1−q1−qv
pu(1− v)v(1− pu)
δF (Z2,Z6,Z1)
+u(q− p)qv− pu
q(1− v)1−qv
v−uv(1− pu)
δF (Z6,Z1,Z2)
=qu(1− v)(v−u)
v(qv− pu)(1−qv)((1− pu)[−q(1− p)+ p(1−q)+q− p]δF (Z1,Z2,Z6)
=0.
This shows that W1,W2 and W3 are collinear. This is known as Pappus’ theorem.
11.5.5 Centroid of a triangle
If Z4,Z5,Z6 are the mid-points of {Z2,Z3}, {Z3,Z1}, {Z1,Z2}, respectively, then withthe notation of 11.5.2 we have that r = s = t = 1
2 , and the condition (11.5.1) in theconverse of Ceva’s theorem holds. Note that [Z3,Z6] is a cross-bar for the interiorregion I R(|Z3Z2Z1) and so [Z2,Z5 meets [Z3,Z6] in a point Z7, which is thus onboth Z2Z5 and Z3Z6. It follows that it is also on Z1Z4. Thus the lines joining thevertices of a triangle to the mid-points of the opposite sides are concurrent. Thepoint of concurrence Z7 is called the centroid of the triangle, and for it by 11.5.2 wehave
Z7 =13Z1 +
13Z2 +
13Z3. (11.5.3)
11.5.6 Orthocentre of a triangle
Let Z8,Z9,Z10 be the feet of the perpendiculars from Z1 to Z2Z3, Z2 to Z3Z1, Z3 toZ1Z2, respectively. Then with the notation of 11.5.2 we have that
r =ca
cosβ , s =ab
cosγ , t =bc
cosα .
Hence
1− r =a− ccosβ
a=
ccos β +bcosγ − ccosβa
=ba
cosγ .
Similarly
1− s =cb
cosα , 1− t =ac
cosβ .
It follows that the condition (11.5.1) in the converse of Ceva’s theorem is true.

204 Vector and complex-number methods Ch. 11
Repeating an argument that weused in 7.2.3, suppose now thatm and n are any lines whichare perpendicular to Z3Z1 andZ1Z2, respectively. If we had m ‖n, then we would have m ⊥Z3Z1, n ‖ m so that n ⊥ Z3Z1; butalready n⊥ Z1Z2 so Z3Z1 ‖ Z1Z2;as Z1,Z2,Z3 are not collinear,this gives a contradiction.
�
�
�
�
�
�
�
�
�
�
�
�
�
�
Z1
Z2
Z3
Z11
Z8
Z9
Z10
Figure 11.10. Orthocentre of triangle.
Thus m is not parallel to n and so these lines meet in a unique point Z11. In partic-ular the lines Z2Z9,Z3Z10 must meet in a unique point Z11 and then by the converse ofCeva’s theorem, Z1Z4 will pass through Z11. Thus the lines through the vertices of atriangle which are perpendicular to the opposite side-lines are concurrent. The pointof concurrence Z11 is called the orthocentre of the triangle.
By (11.5.2) we thus have
Z11 =ab cos γ a
c cosβac cos β + a
c cosγ cosαZ1 +
ac cosγ cosα
ac cosβ + a
c cosγ cosαZ2 +
ab cosα cosβ
ac cosβ + a
c cosγ cosαZ3
=ab
cos β cosγcos β + cosγ cosα
Z1 +cosγ cos α
cosβ + cosγ cos αZ2 +
cb
cosα cosβcosβ + cosγ cos α
Z3.
(11.5.4)
We could also proceed in this special case as follows. The argument is laid outfor the case in the diagram, with β and γ acute angles and (Z1,Z2,Z3) positive inorientation. The other cases can be treated similarly.
Now by 5.2.2 applied to [Z10,Z2,Z3], |∠Z11Z2Z4|◦ = |∠Z10Z2Z3|◦ = 90−|γ |◦ sothat
|Z11,Z8||Z2,Z8| = tan∠Z11Z2Z8 = cotγ .
But |Z2,Z8| = ccos β and so |Z11,Z8| = ccos β cot γ . Thus δF (Z11,Z2,Z3) =12accos β cotγ and since δF (Z1,Z2,Z3) =
12acsin β , we have that
δF (Z11,Z2,Z3)
δF (Z1,Z2,Z3)= cotβ cot γ .
As similar results hold in the other two cases, we have by 11.4.2 that
Z11 = cotβ cotγZ1 + cotγ cotαZ2 + cotα cotβZ3.
That the sum of the coefficients is equal to 1 follows from the identity
tanα + tanβ + tanγ = tanα tanβ tan γ

Sec. 11.5 Vector methods in geometry 205
for the angles of a triangle. For, using the notation of 10.8.1, |α |◦+ |β |◦+ |γ |◦ = 180,and so αF +βF + γF = 180F so that
− tanγF = tan(180F − γF ) = tan(αF +βF )
=tanαF + tanβF
1− tanαF tanβF
,
whence the result follows by multiplying across and rearranging. This formula failsin the case of a right-angled triangle.
From our two methods we have two formulae for Z11, but we further note that
cos(αF + γF ) = cos(180F −βF ),
cosαF cosγF − sinαF sinγF =−cosβF ,
cos α cosγ + cosβ = sinα sin γ .
On using this with the sine rule, the two formulae for the orthocentre are recon-ciled.
11.5.7 Incentre of a triangle
Let Z1,Z2,Z3 be non-collinear points. By 5.5.1 the mid-line of |Z2Z1Z3 will meet[Z2,Z3] in a point Z12 where Z12 = (1− r)Z2 + rZ3, and
r1− r
=cb.
By similar arguments the mid-line of |Z3Z2Z1 will meet [Z3,Z1] in a point Z13 whereZ13 = (1− s)Z3 + sZ1, and
s1− s
=ac,
and the mid-line of |Z1Z3Z2 will meet [Z1,Z2] in a point Z14 where Z14 = (1− t)Z1 +tZ2, and
t1− t
=ba.
The product of these three ratios is clearly equal to 1 so (11.5.1) is satisfied. By thecross-bar theorem, [Z2,Z13 will meet [Z3,Z14] in a point Z15 and so Z2Z13,Z3Z14 meetin Z15. It follows that Z1Z12 also passes through the point Z15.Thus the mid-lines of theangle-supports |Z2Z1Z3,|Z3Z2Z1, |Z1Z3Z2 for a triangle[Z1,Z2,Z3] are concurrent. Theperpendicular distances fromthis point Z15 to the side-linesof the triangle are equal byEx.4.4, so the circle with Z15
as centre and length of radiusthese common perpendiculardistances will pass through thefeet of these perpendiculars.
�
�
�
� �
�
�
�
�
�
Z1
Z2
Z3
Z15
Figure 11.11. Incentre of triangle.

206 Vector and complex-number methods Ch. 11
This circle is called the incircle for the triangle; its centre Z15 is called the incentreof the triangle. The three side-lines are tangents to the circle with the points of contactbeing the feet of the perpendiculars. For the incentre, by (11.5.2) we have the formula
Z15 =a
a+b+ cZ1 +
ba+b+ c
Z2 +c
a+b+ cZ3. (11.5.5)
11.6 MOBILE COORDINATES
NOTE. In standard vector notation, the vector product or cross product takes us outof the plane Π and into solid geometry. Sensed-area gives us half of the magnitudeof the vector product and we use that instead. Without the vector product, however,we have not got orientation of the plane Π by vector means. We go on to supply thislack.
However the standard vector operations can be awkward in dealing with perpen-dicularity and distance, and can involve quite a bit of trigonometry, so we also set outa method of reducing unwieldy calculations.
11.6.1 Grassmann’s supplement of a vector
Given any Z �= O, we show that there is a unique W such that
|O,W|= |O,Z|, OW ⊥ OZ, δF (O,Z,W )> 0.
Proof . With Z ≡ (x,y), W ≡ (u,v) these require
x2 + y2 = u2 + v2, ux+ vy = 0, xv− yu > 0.
By the middle one of these ∣∣∣∣ x y−v u
∣∣∣∣= 0,
so the rows of this are linearly dependent. Thus we have r(x,y)+ s(−v,u) = (0,0),for some (r,s) �= (0,0). We cannot have r = 0 as that would imply W = O and soZ = O. Then
x =sr
v, y =− sr
u,
so by the first property above
x2 + y2 =s2
r2 (x2 + y2).
Thus we have either s/r = 1, so that u = −y, v = x, for which 2δF (O,Z,W ) = x2 +y2 > 0, or we have s/r = −1, so that u = y, v = −x, for which 2δF (O,Z,W ) =−(x2 + y2)< 0. Thus the unique solution is u =−y, v = x.
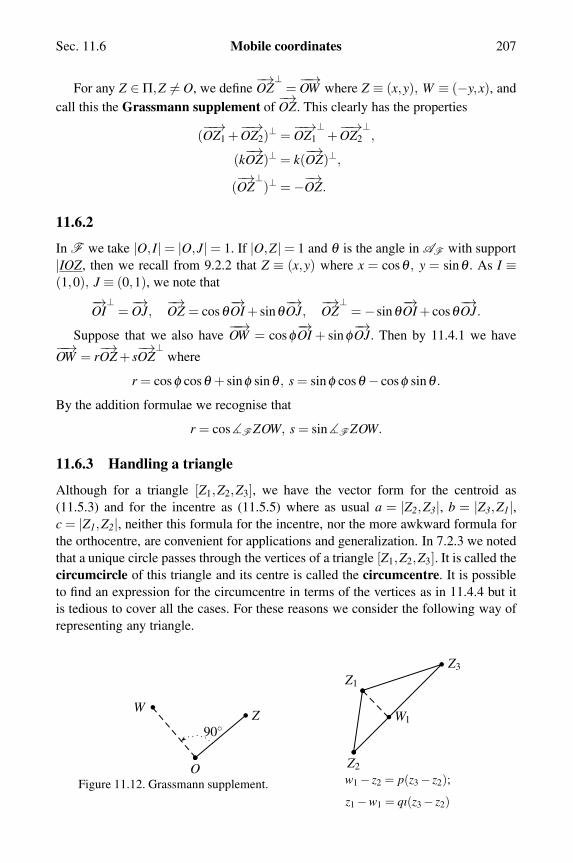
Sec. 11.6 Mobile coordinates 207
For any Z ∈ Π,Z �= O, we define−→OZ
⊥=
−−→OW where Z ≡ (x,y), W ≡ (−y,x), and
call this the Grassmann supplement of−→OZ. This clearly has the properties
(−−→OZ1 +
−−→OZ2)
⊥ =−−→OZ1
⊥+−−→OZ2
⊥,
(k−→OZ)⊥ = k(
−→OZ)⊥,
(−→OZ
⊥)⊥ =−−→
OZ.
11.6.2
In F we take |O, I|= |O,J|= 1. If |O,Z|= 1 and θ is the angle in AF with support|IOZ, then we recall from 9.2.2 that Z ≡ (x,y) where x = cosθ , y = sinθ . As I ≡(1,0), J ≡ (0,1), we note that
−→OI
⊥=
−→OJ,
−→OZ = cos θ
−→OI + sinθ
−→OJ,
−→OZ
⊥=−sinθ
−→OI + cosθ
−→OJ.
Suppose that we also have−−→OW = cosφ
−→OI + sinφ
−→OJ. Then by 11.4.1 we have
−−→OW = r
−→OZ + s
−→OZ
⊥where
r = cos φ cosθ + sinφ sinθ , s = sinφ cosθ − cosφ sinθ .
By the addition formulae we recognise that
r = cos�F ZOW, s = sin�F ZOW.
11.6.3 Handling a triangle
Although for a triangle [Z1,Z2,Z3], we have the vector form for the centroid as(11.5.3) and for the incentre as (11.5.5) where as usual a = |Z2,Z3|, b = |Z3,Z1|,c = |Z1,Z2|, neither this formula for the incentre, nor the more awkward formula forthe orthocentre, are convenient for applications and generalization. In 7.2.3 we notedthat a unique circle passes through the vertices of a triangle [Z1,Z2,Z3]. It is called thecircumcircle of this triangle and its centre is called the circumcentre. It is possibleto find an expression for the circumcentre in terms of the vertices as in 11.4.4 but itis tedious to cover all the cases. For these reasons we consider the following way ofrepresenting any triangle.
�
�
�
�
O
ZW
90◦
Figure 11.12. Grassmann supplement.
�
�
�
�
�
�
Z1
Z2
Z3
W1
w1 − z2 = p(z3 − z2);
z1 −w1 = qı(z3 − z2)

208 Vector and complex-number methods Ch. 11
Given non-collinear points Z1,Z2,Z3, by 11.4.1 we can express
−−→OZ1 =
−−→OZ2 + p1(
−−→OZ3 −−−→
OZ2)+q1(−−→OZ3 −−−→
OZ2)⊥,
for unique real numbers p1 and q1, not both equal to 0. This is the geometrical back-ground but the manipulations are simpler if we use complex coordinates instead.
In (11.6.1) for any Z �= O we take Z ∼ z where z = x + ıy and W ∼ w wherew = u+ iv. Then we note that ız =−y+ ıx and so W = Z⊥ if and only if w = ız. Thenfor Z1 ∼ z1,Z2 ∼ z2,Z3 ∼ z3 we write
z1 − z2 = p1(z3 − z2)+q1ı(z3 − z2) = (p1 +q1ı)(z3 − z2), (11.6.1)
that is
(x1 − x2,y1 − y2) = (p1(x3 − x2)−q1(y3 − y2), p1(y3 − y2)+q1(x3 − x2)) .
We coin the name mobile coordinates of the point Z1 with respect to (Z2,Z3) andF , for the pair (p1,q1).
It follows immediately that |Z1,Z2|=√
p21 +q2
1|Z2,Z3|, and as from (11.6.1) z1 −z3 = (p1 −1+q1ı)(z3 − z2) we also have |Z3,Z1|=
√(p1 −1)2 +q2
1|Z2,Z3|. From
z3 − z1
z2 − z1=
p1 −1+q1ıp1 +q1ı
,z1 − z2
z3 − z2= p1 +q1ı,
z2 − z3
z1 − z3=
11− p1 +q1ı
,
with α =�F Z2Z1Z3, β = �F Z3Z2Z1, γ =�F Z1Z3Z2, we have that
cis α =(p1 −1+q1ı)(p1 −q1ı)√
p21 +q2
1
√(p1 −1)2 +q2
1
,cis β =p1 +q1ı√
p21 +q2
1
,cis γ =1− p1 +q1ı√(1− p1)2 +q2
1
.
We also have that
p1 + ıq1 =√
p21 +q2
1cis β =ca
cis β ,
1− p1 − ıq1 =√
(p1 −1)2 +q21cis γ =
ba
cis γ ,
p1(p1 −1)+q21 + ıq1 =
√p2
1 +q21
√(p1 −1)2 +q2
1cis α
=bca2 cis α . (11.6.2)
Thus we have in terms of p1 and q1, the ratios of the lengths of the sides and cosinesand sines of the angles. Moreover, it is easily calculated that
δF (Z1,Z2,Z3) =q1
2|Z2,Z3|2,
so the orientation of this triple is determined by the sign of q1.

Sec. 11.6 Mobile coordinates 209
Note too that if
z− z2 = (p+qı)(z3 − z2), z′ − z2 = (p′+q′ı)(z3 − z2),
then|z′ − z|= |p′ −p+(q′ −q)ı||z3 − z2|,
and so
|Z,Z′|=√
(p′ − p)2 +(q′ −q)2|Z2,Z3|= a√
(p′ − p)2 +(q′ −q)2. (11.6.3)
11.6.4 Circumcentre of a triangle
To make our notation consis-tent we now use the notation[Z1,Z2,Z3] for the triangle[A,B,C] in 7.2.3 and Z16
for its circumcentre D. Asusual we denote by Z4,Z5,Z6
the mid-points of the sides[Z2,Z3], [Z3,Z1], [[Z1,Z2],respectively. We note thatpoints Z on the perpendicularbisector of [Z2,Z3] have com-plex coordinates of the formz = z2 +(1
2 +qı)(z3 − z2), whereq ∈ R.
�
�
�
�
�
�
�
�
�
Z1
Z2
Z3
Z16
Z4
Z5
Z6
Figure 11.13. Circumcentre of triangle.
We also have z6 =12(z1 + z2). As we are to have ZZ6 ⊥ Z1Z2 we must have
z2 +(12 +qı)(z3 − z2)− 1
2(z1 + z2) = ır(z1 − z2),
for some real number r. Then
z2 +(12 +qı)(z3 − z2)− 1
2 [2z2 +(p1 +q1ı(z3 − z2)] = ır(z1 − z2),
[12 +qı− 1
2(p1 +q1ı)− ır(p1 +q1ı)](z3 − z2) = 0,12 p1 − rq1 − 1
2 +(12q1 + rp1)ı = qı
Thus we must haveq = 1
2q1 + rp1, rq1 =12 p1 − 1
2 ,
from which we obtain the solutions r = p1−12q1
and then q = 12q1
[p21 +q2
1 − p1].Thus the circumcentre has complex coordinate
z16 = z2 +12
[1+
p21 +q2
1 − p1
q1ı
](z3 − z2). (11.6.4)

210 Vector and complex-number methods Ch. 11
By Pythagoras’ theorem
|z16 − z2|2 = |z4 − z2|2 + |z4 − z16|2= {1
2 |z3 − z2|2}2 +{|q|2|z3 − z2|}2
= {14 +[
q21 + p2
1 − p1
2q1]2}|z3 − z2|2
=a2
4q21
{(q21 + p2
1 − p1)2 +q2
1}.
Thus the radius length of the circumcircle is
|z16 − z2|= a2|q1|
√q2
1 +[p21 +q2
1 − p1]2. (11.6.5)
In fact we can also derive the formula (11.6.5) slightly differently as follows.Directly from (11.6.4) we have that
|z16 − z2|2 = 14|1+
(p2
1 +q21
q1− p1
q1
)ı|2a2
= 14
[1+
(p2
1 +q21
q1− p1
q1
)2]
a2
=a2
4q21
[q2
1 +[p21 +q2
1 − p1]2] .
We can deduce from this material a formula for the circumcentre in terms of arealcoordinates. For by (11.6.2)
p21 − p1 +q2
1 =bca2 cosα , q1 =
bca2 sin α ,
so that z = z2 +12(1+ cotα ı)(z3 − z2). Then by (11.6.1) we have
x− x2 =12(x3 − x2)− 1
2 cot α(y3 − y2), y− y2 =12 cotα(x3 − x2)+
12(y3 − y2).
From this we have that
δF (Z,Z2,Z3) = δF (Z −Z2,O,Z3 −Z2)
=14 cotα
[(x3 − x2)
2 +(y3 − y2)2]= 1
4a2 cotα .
As δF (Z1,Z2,Z3) =12q1a2 = 1
2bcsin α we have
δF (Z,Z2,Z3)
δF (Z1,Z2,Z3)=
12
a2 cotαbcsin α
,
and by use of the sine rule this is seen to be equal to
12
cosαsin β sinγ
.

Sec. 11.6 Mobile coordinates 211
By cyclic rotation we can write down the other two coefficients and so have
Z16 =12
cosαsinβ sinγ
Z1 +12
cos βsin γ sinα
Z2 +12
cosγsinα sinβ
Z3.
That the sum of the coefficients here is equal to 1 follows from the identity
sin2α + sin2β + sin2γ = 4sin α sinβ sinγ ,
for the angles of a triangle. For
sin2αF + sin2βF + sin2γF
= sin(αF +βF )cos(αF −βF )+2sinγF cosγF
= 2sinγF [cos(αF −βF )+ cosγF ]
= 2sinγF [cos(αF −βF )− cos(αF +βF )]
= 2sinγF .2sin αF sin βF .
11.6.5 Other distinguished points for a triangle
For the centroid Z7 of [Z1,Z2,Z3] we have by 11.5.3 that z7 =13(z1 + z2 + z3) and so
z7 − z2 =13(z1 + z2 + z3)− z2 =
13(z1 − z2)+
13(z3 − z2)
= 13(p1 +q1ı)(z3 − z2)+
13(z3 − z2)
= 13(p1 +1+q1ı)(z3 − z2). (11.6.6)
This gives the complex coordinate of the centroid.We next turn to the orthocentre of this triangle. Points Z on the line through Z1
perpendicular to Z2Z3 have complex coordinates of the form
z =z2 +(p1 +qı)(z3 − z2) = z3 +(p1 −1+qı)(z3 − z2)
=z3 +p1 −1+qı
p1 +q1ı(z1 − z2).
For Z3Z to be also perpendicular to Z1Z2 we also need the coefficient of z1 − z2 hereto be purely imaginary. Thus we need
(p1 −1)p1 +qq1 = 0 i.e. q =−(p1 −1)p1
q1,
and so obtain
z11 = z2 + p1
(1− p1 −1
q1ı
)(z3 − z2), (11.6.7)
as the complex coordinate of the orthocentre.It takes more of an effort to deal with the incentre. The point with complex co-
ordinate z2 +1
|Z2,Z3|(z3 − z2) lies on the half-line [Z2,Z3 at a unit distance from Z2.
212 Vector and complex-number methods Ch. 11
Similarly the point with complex coordinate z2 +1
|Z2,Z1| (z1 − z2), lies on the half-line[Z2,Z1 at a unit distance from Z2. We wish to consider the mid-point of these pointswith complex coordinates
z2 +1
|Z2,Z3|(z3 − z2), z2 +1
|Z2,Z1| (z1 − z2).
Now z1 − z2 = (p1 + ıq1)(z3 − z2) so that
|z1 − z2|= |p1 + ıq1||z3 − z2|=√
p21 +q2
1|z3 − z2|.Then
z1 − z2
|Z2,Z1| =p1 + ıq1√
p21 +q2
1
z3 − z2
|Z2,Z3| .
The mid-point of these two points has complex coordinate
z2 +1
2|Z2,Z3|
⎡⎣z3 − z2 +
1√p2
1 +q21
(z1 − z2)
⎤⎦
= z2 +1
2|Z2,Z3|
⎡⎣z3 − z2 +
p1 +q1ı√p2
1 +q21
(z3 − z2)
⎤⎦
= z2 +1
2|Z2,Z3|
⎡⎣1+
p1 + ıq1√p2
1 +q21
⎤⎦(z3 − z2).
Then points on the midline of |Z1Z2Z3 then have complex coordinates of the form
z2 +r
2|Z2,Z3|
⎡⎣1+
p1 +q1ı√(p2
1 +q21
⎤⎦(z3 − z2),
for real numbers r.By a similar argument the point with complex coordinate z3 +
1|Z2,Z3| (z2 − z3) lies
on the half-line [Z3,Z2 at a unit distance from Z3. Also the point with complex coor-dinate z3 +
1|Z3,Z1|(z1 − z3), lies on the half-line [Z3,Z1 at a unit distance from Z3. We
wish to consider the mid-point of these points with complex coordinates
z3 +1
|Z2,Z3|(z2 − z3), z3 +1
|Z3,Z1|(z1 − z3).
As preparation we note that
z1 = z2 +(p1 + ıq1)(z3 − z2) = z3 +(p1 −1+ ıq1)(z3 − z2)
z1 − z3 = (1− p1 − ıq1)(z2 − z3), |Z1,Z3|=√
(1− p1)2 +q21|Z2,Z3|,
z1 − z3
|Z3,Z1| =1− p1 − ıq1
[√
(1− p1)2 +q21
z2 − z3
|Z2,Z3| .

Sec. 11.6 Mobile coordinates 213
The mid-point sought is
z3 +1
2|Z2,Z3|
⎡⎣z2 − z3 +
1− p1 − ıq1√(1− p1)2 +q2
1
(z2 − z3)
⎤⎦
= z3 +1
2|Z2,Z3|
⎡⎣1+
1− p1 − ıq1√(1− p1)2 +q2
1
⎤⎦
Then points on the midline of |Z2Z3Z1 have complex coordinates of the form
z3 +s
2|Z2,Z3|
⎛⎝ 1− p1 +q1ı√
(p1 −1)2 +q21
⎞⎠(z2 − z3)
for real numbers s.For a point of intersection of the two mid-lines we need
z2 +r
2|Z2,Z3|
⎛⎝1+
p1 +q1ı√(p2
1 +q21
⎞⎠(z3 − z2)
= z3 +s
2|Z2,Z3|
⎛⎝1+
1− p1 −q1ı√(p1 −1)2 +q2
1
⎞⎠(z2 − z3)
= z3 − s2|Z2,Z3|
⎛⎝1+
1− p1 −q1ı√(p1 −1)2 +q2
1
⎞⎠(z3 − z2).
Then
z3 − z2+
+
⎡⎣ −r
2|Z2,Z3|(1+p1 + ıq1√
p21 +q2
1
− s2|Z2,Z3|(1+
1− p1 − ıq1√(1− p1)2 +q2
1
)
⎤⎦(z3 − z2) = 0,
1+−r
2|Z2,Z3|(1+p1 + ıq1√
p21 +q2
1
)− s2|Z2,Z3|(1+
1− p1 − ıq1√(1− p1)2 +q2
1
) = 0.
Equating to 0 the imaginary part we obtain
− rq1√p2
1 +q21
+sq1√
(1− p1)2 +q21
= 0,
and the real part
1− r2|Z2,Z3|
⎛⎝1+
p1√p2
1 +q21
⎞⎠− s
2|Z2,Z3|
⎛⎝1+
1− p1√(1− p1)2 +q2
1
⎞⎠= 0.

214 Vector and complex-number methods Ch. 11
Assuming q1 �= 0 we have the pair of equations
1√p2
1 +q21
r− 1√(1− p1)2 +q2
1
s = 0,
⎛⎝1+
p1√p2
1 +q21
⎞⎠r+
⎛⎝1+
1− p1√(1− p1)2 +q2
1
⎞⎠s = 2|Z2,Z3|. (11.6.8)
We denote by D1 the value of the determinant of coefficients on the left-hand side
∣∣∣∣∣∣1√
p21+q2
1
− 1√(1−p1)2+q2
1
1+ p1√p2
1+q21
1+ 1−p1√(1−p1)2+q2
1
∣∣∣∣∣∣and have
D1 =
√(1− p1)2 +q2
1 +√
p21 +q2
1 +1√p2
1 +q21
√(1− p1)2 +q2
1
.
We denote by D2 the value of the determinant
∣∣∣∣∣∣0 − 1√
(1−p1)2+q21
2|Z2,Z3| 1+ 1−p1√(1−p1)2+q2
1
∣∣∣∣∣∣which has the value
D2 =2|Z2,Z3|√
(1− p1)2 +q21
.
Then we have the solution
r =D2
D1=
2|Z2,Z3|√
p21 +q2
1√(1− p1)2 +q2
1
√p2
1 +q21 +1
.
Thus the point of intersection from this bisector is
z2 +
√p2
1 +q21√
(1− p1)2 +q21 +
√p2
1 +q21 +1
⎡⎣1+
p1 + ıq1√p2
1 +q21
⎤⎦(z3 − z2), (11.6.9)
which is thus the incentre Z15.

Sec. 11.6 Mobile coordinates 215
11.6.6 Euler line of a triangle
With the notation Z7,Z16,Z11 for the centroid, circumcentre and orthocentre, respec-tively, of a triangle [Z1,Z2,Z3] we have the formulae
z7 − z2 =13(p1 +1+q1ı)(z3 − z2),
z16 − z2 =12
(1+
p21 − p1 +q2
1
q1ı
)(z3 − z2),
z11 − z2 = p1
(1− p1 −1
q1ı
)(z3 − z2).
It is straightforward to check that
23z16 +
13z11 = z2 +
23 (z16 − z2)+
13(z11 − z2) = z7,
and so Z7 ∈ Z16Z11.Thus we have shown that the centroid, circumcentre and orthocentre of any
triangle are collinear. This is a result due to Euler, after whom this line of collinear-ity is named the Euler line of the triangle.
11.6.7 Similar triangles
For any two triangles [Z1,Z2,Z3] and [Z′1,Z
′2,Z
′3] suppose that we have z1 = z2+(p1+
q1ı)(z3−z2), z′1 = z′2+(p′1+q′1ı)(z′3 −z′2), where (p1,q1),(p′1,q′1) are couples of real
numbers, neither being (0,0). Then these triangles are similar in the correspondence(Z1,Z2,Z3)→ (Z′
1,Z′2,Z
′3) if and only if p′1 = p1, q′1 =±q1.
Proof . First suppose that p′1 = p1, q′1 = q1 so that z1 = z2 + (p1 + q1ı)(z3 −z2), z′1 = z′2 +(p′1 +q′1ı)(z′4 − z′2). Then we have that
|�F Z3Z2Z1|◦ = |�F Z′3Z′
2Z′1|◦, |�F Z1Z3Z2|◦ = |�F Z′
1Z′3Z′
2|◦.
It follows by 5.3.2 that the measures of the corresponding angles of these trianglesare equal, and so the triangles are similar, with the lengths of corresponding sidesproportional. Moreover, the triples (Z1,Z2,Z3) and (Z′
1,Z′2,Z
′3) are similarly oriented.
�
�
�
�
�
�
Z1
Z2
Z3
W1
Figure 11.14. Similar triangles.
�
�
�
��
�
Z′1
Z2
Z′3
W ′1

216 Vector and complex-number methods Ch. 11
Next suppose that z1 = z2 +(p1 +q1ı)(z3 − z2), z′1 = z′2 +(p1 −q1ı)(z′3 − z′2). Byan analogous argument the triangles are still similar, and now the triples (Z1,Z2,Z3)and (Z′
1,Z′2,Z
′3) are oppositely oriented.
Conversely, suppose that [Z1,Z2,Z3] and [Z′1,Z
′2,Z
′3] are similar triangles in the
correspondence (Z1,Z2,Z3) → (Z′1,Z
′2,Z
′3). Let W1 be the foot of the perpendicular
from Z1 to Z2Z3, and from parametric equations of Z2Z3 choose p1 ∈ R so that w1 =z2 + p1(z3 − z2). Then
|Z2,W1||Z2,Z3| = |p1|,
and p1 is positive or negative according or not as W1 is on the same or opposite sideof Z2 as Z3 is on the line Z2Z3, that is according as the wedge-angle ∠Z3Z2Z1 is acuteor obtuse. As W1Z1 ⊥ Z2Z3 we can find q1 ∈ R so that z1 −w1 = q1ı(z3 − z2). Then
|Z1,W1||Z2,Z3| = |q1|,
and q1 is positive or negative according as (Z1,Z2,Z3) is positively or negativelyoriented.
As the lengths of the sides of the two triangles are proportional, we have
|Z′2,Z
′3|= k|Z2,Z3|, |Z3,Z1|= k|Z′
3,Z′1|, |Z′
1,Z′2|= k|Z1,Z2|,
for some k > 0. Let W ′1 be the foot of the perpendicular from Z4 to the line Z5Z6. Then
the triangles [Z1,Z2,W1] and [Z′1,Z
′2,W
′1] are similar, so we have that
|Z′2,W
′1|
|Z2,W1| =|Z′
1,Z′2|
|Z1,Z2| = k.
It follows that
|Z′2,W
′1|= k|Z2,W1|= k|p1||Z2,Z3|= |p1||Z′
2,Z′3|.
But W ′1 is on the same side of the point Z′
2 on the line Z′2Z′
3 as Z′3 is if the wedge-angle
∠Z′3Z′
2Z′1 is acute, and on the opposite side if this angle is obtuse. Hence we have that
w′1 − z′2 = p1(z′3 − z2).
As Z′1W
′1 ⊥ Z′
2Z′3, we have z′1−w′
1 = jı(z′3−z′2) for some j ∈R, and then |Z′1,W
′1|=
|j||Z′1,Z
′3|. But
|Z′1,W
′1|
|Z1,W1| =|Z′
1,Z′2|
|Z1,Z2| =|Z′
2,Z′3|
|Z2,Z3| ,so
|Z′1,W
′1|
|Z′25,Z′
3|=
|Z1,W1||Z2,Z3| = |q1|.
Hence j = ±q1 and we are to take the plus if (Z1,Z2,Z3) and (Z′1,Z
′2,Z
′3) have the
same orientation, the minus if the opposite orientation.Thus our mobile coordinates (p1,q1) are intimately connected with similarity of
triangles.

Sec. 11.6 Mobile coordinates 217
11.6.8 Centroids of similar triangles erected on the sides of a triangle
Given an arbitrary triangle [Z1,Z2,Z3], if we consider points Z4, Z5 and Z6 defined by
z4 =z2 +(p1 +q1ı)(z3 − z2), z5 = z3 +(p1 +q1ı)(z1 − z3),
z6 =z1 +(p1 +q1ı)(z2 − z1),
for some non-zero real numbers p1 and q1, then we have triangles [Z2,Z3,Z4],[Z3,Z1,Z5], [Z1,Z2,Z6] erected on the sides [Z2,Z3], [Z3,Z1] and [Z1,Z2], respectively,which are similar to each other and have the same orientation as each other.
We denote the centroid of [Z1,Z2,Z3] by Z7 so that z7 = 13(z1 + z2 + z3) and the
centroid of [Z4,Z5,Z6] by Z′7 so that
z′7 =13 [z2 +(p1 +q1ı)(z3 − z2)+ z3 +(p1 +q1ı)(z1 − z3)+ z1 +(p1 +q1ı)(z2 − z1),
= 13 [z2 + z3 + z1]+
13(p1 +q1ı)[(z3 − z2)+ (z1 − z3)+ (z2 − z1)]
= 13(z1 + z2 + z3).
Hence Z′7 is the same point as Z7.
First we denote the centroid of [Z2,Z3,Z4] by Z(i)7 and then
z(i)7 = 13 [z2 + z3 + z4] =
13 [z2 + z3 + z2 +(p1 +q1ı)(z3 − z2)].
Secondly we denote the centroid of Z3,Z1,Z5] by Z(ii)7 and then
z(ii)7 = 13 [z3 + z1 + z3 +(p1 +q1ı)(z1 − z3)].
Finally we denote the centroid of [Z1,Z2,Z6] by Z(iii)7 and then
z(iii)7 = 13 [z1 + z2 + z1 +(p1 +q1ı)(z2 − z1)].
Then we have that
z(i)7 + z(ii)7 + z(iii)7
= 13 [(2z2 + z3 +2z3 + z1 +2z1 + z2)+ (p1 +q1ı)(z3 − z2 + z1 − z3 + z2 − z1)]
= z1 + z2 + z3.
It follows that the centroid of the triangle [Z(i)7 ,Z(ii)
7 ,Z(iii)7 ] is the same point as the
centroid Z7 of the original triangle [Z1,Z2,Z3].
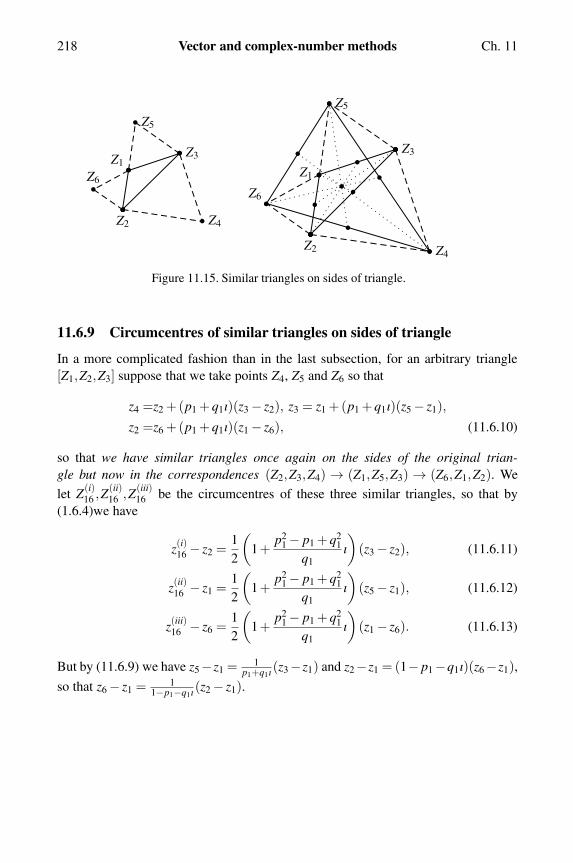
218 Vector and complex-number methods Ch. 11
�
�
�
� �
�
� �
�
� �
�
�
Z1
Z2
Z3
Z4
Z5
Z6
Figure 11.15. Similar triangles on sides of triangle.
�
�
�
��
�
��
�
� �
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
Z1
Z2
Z3
Z4
Z5
Z6
11.6.9 Circumcentres of similar triangles on sides of triangle
In a more complicated fashion than in the last subsection, for an arbitrary triangle[Z1,Z2,Z3] suppose that we take points Z4, Z5 and Z6 so that
z4 =z2 +(p1 +q1ı)(z3 − z2), z3 = z1 +(p1 +q1ı)(z5 − z1),
z2 =z6 +(p1 +q1ı)(z1 − z6), (11.6.10)
so that we have similar triangles once again on the sides of the original trian-gle but now in the correspondences (Z2,Z3,Z4) → (Z1,Z5,Z3) → (Z6,Z1,Z2). We
let Z(i)16 ,Z
(ii)16 ,Z(iii)
16 be the circumcentres of these three similar triangles, so that by(1.6.4)we have
z(i)16 − z2 =12
(1+
p21 − p1 +q2
1
q1ı
)(z3 − z2), (11.6.11)
z(ii)16 − z1 =12
(1+
p21 − p1 +q2
1
q1ı
)(z5 − z1), (11.6.12)
z(iii)16 − z6 =12
(1+
p21 − p1 +q2
1
q1ı
)(z1 − z6). (11.6.13)
But by (11.6.9) we have z5−z1 =1
p1+q1ı(z3−z1) and z2−z1 = (1− p1−q1ı)(z6−z1),
so that z6 − z1 =1
1−p1−q1ı(z2 − z1).

Sec. 11.6 Mobile coordinates 219
Also, by (11.6.12)
z(iii)16 +(p1 +q1ı)(z(ii)16 − z(iii)16 )
= (1− p1 −q1ı)z(iii)16 +(p1 +q1ı)z(ii)16
= (1− p1 −q1ı)(z(iii)16 − z1)+ (p1 +q1ı)(z(ii)16 − z1)+ (1−q1ı+ z1ı)z1
= (1− p1 −q1ı)(z(iii)16 − z1)+ (p1 +q1ı)(z(ii)16 − z1)+ z1
= 12
[1− p2
1 − p1 +q21
q1ı
](z2 − z1)+
12
[1+
p21 − p1 +q2
1
q1ı
](z3 − z1)+ z1
= 12 (z2 + z3)+
12
[p2
1 − p1 +q21
q1ı(z3 − z1)− p2
1 − p1 +q21
q1ı(z2 − z1)
]
= 12 (z2 + z3)+
12
p21 − p1 +q2
1
q1ı(z3 − z1 − (z2 − z1))
= 12 (z2 + z3)+
12
p21 − p1 +q2
1
q1ı(z3 − z2)
=z(i)16 .
It follows that the triangle [Z(i)16 ,Z
(ii)16 ,Z(iii)
16 ] is also similar to the similar triangles
above, in the correspondence (Z2,Z3,Z4)→ (Z(iii)16 ,Z(ii)
16 ,Z(i)16 ).
In the particular case when p1 = 1/2, q1 =√
3/2, the similar triangles are allequilateral triangles, that is all three sides have equal lengths. In this case the lastresult is known as Napoleon’s theorem. It is easier to prove than the more generalcase, as for it we can work just with centroids.
11.6.10 Triangle with vertices the mid-points of sides of given triangle
For a triangle [Z1,Z2,Z3] let Z4,Z5,Z6 be the mid-points of the the sides [Z2,Z3],[Z3,Z1], [Z1,Z2], respectively. Suppose that z1 = z2 +(p1 +q1ı)(z3 − z2). Now
z4 =12 (z2 + z3) = z2 +
12(z3 − z2),
z5 =12 (z3 + z1) = z2 +
12(z3 − z2)+
12 [z2 +(p1 +q1ı(z3 − z2)]
=z2 +12(1+ p1 +q1ı)(z3 − z2),
z6 =12 (z1 + z2) =
12 [z2 +(p1 +q1ı(z3 − z2)+ z2] = z2 +
12(p1 +q1ı)(z3 − z2).
Then
z6 − z5 =12(p1 +q1ı−1− p1−q1ı)(z3 − z2) =− 1
2(z3 − z2),
z4 − z5 = z2 +12 (z3 − z2)− z2 − 1
2(1+ p1 +q1ı)(z3 − z2)
=− 12(p1 +q1ı)(z3 − z2) = (p1 +q1ı)(z6 − z5). (11.6.14)
Thus the triangle [Z4,Z5,Z6] is similar to the original triangle [Z1,Z2,Z3].

220 Vector and complex-number methods Ch. 11
By (11.6.4) the circumcentre Z′16 of the triangle [Z4,Z5,Z6] is given by
z′16 = z5 +12
[1+
p21 +q2
1
q1ı− p1
q1ı
](z6 − z5), (11.6.15)
and if we relate this to the original triangle it becomes
z′16 = z2 +12(1+ p1 +q1)ı(z3 − z2)+
12
[1+− p1
q1+
p21 +q2
1
q1ı
](− 1
2)(z3 − z2)
= z2 +12
[1+ p1 +q1ı− 1
2 +12
p1
q1− p2
1 +q21
2q1ı
](z3 − z2)
= z2 +12
[12 + p1 +q1ı+ 1
2
p1
q1ı− p2
1 +q21
2q1ı
](z3 − z2). (11.6.16)
We now find another point on this circle with centre (11.6.16). The foot Z8 of theperpendicular from Z1 onto Z2Z3 has complex coordinate z8 = z2 + p1(z3 − z2). Weseek the circumcentre of the triangle [Z4,Z8,Z6]. For the moment let us take
z4 = z8 +(p2 +q2ı)(z6 − z8) (11.6.17)
from which
z4
= (1− p2 −q2ı)z8 +(p2 +q2ı)z6
= (1− p2 −q2ı)[z2 + p1(z3 − z2)]+ (p2 +q2ı)[z2 +12(p1 +q1ı)(z3 − z2)]
= (1− p2 −q2ı+ p2 +q2ı)z2 +[p1(1− p2 −q2ı)+ (p2 +q2ı)12 (p1 +q1ı)](z3 − z2)
= z2 +{
p1(1− p2)+12 (p2 p1 −q2q1)+ [−p1q2 +
12(p2q1 + p1q2)]ı]
}(z3 − z2)
= z2 +12 (z3 − z2).
Thusp1(1− p2)+
12(p2 p1 −q2q1)+ [−p1q2 +
12(p2q1 + p1q2)]ı = 1
2 ,
from which
12 (p2q1 − p1q2) = 0, p1(1− p2)+
12(p2 p1 −q2q1) =
12 .
As p1 �= 0 we have q2 =p2p1
q1. As 2p1 −2p1 p2 + p2 p1 −q2q1 = 1 we have
2p1 − p1 p2 = 1+q2q1. Hence 2p1 − p1 p2 = 1+ p2p1
q21 and so
2p1 −1 = p2(q2
1
p1+ p1), p2 =
(2p1 −1)p1
p21 +q2
1
,
q2 =q1
p1
(2p1 −1)p1
p21 +q2
1
=(2p1 −1)q1
p21 +q2
1
.

Sec. 11.6 Mobile coordinates 221
Then
p22 +q2
2 =(2p1 −1)2(p2
1 +q21)
(p21 +q2
1)2
=(2p1 −1)2
p21 +q2
1
.
By (11.6.4) the circumcentre Z16 of the triangle [Z1,Z2,Z3] has complex coordi-nate
z16 = z2 +12
[1− p1
q1ı+
p21 +q2
1
q1ı
](z3 − z2),
and so the circumcentre Z(ii)16 of of the triangle [Z4,Z8,Z6] has complex coordinate
z(ii)16 = z8 +12
[1− p2
q2ı+
p22 +q2
2
q2ı
](z6 − z8)
= z2 + p1(z3 − z2)+12
[1− p2
q2ı+
p22 +q2
2
q2ı
]( 12(p1 +q1ı)(z3 − z2)− p1(z3 − z2)
)= z2 +
[p1 +
12(1−
p2
q2ı+
p22 +q2
2
q2ı)1
2 (−p1 +q1ı)
](z3 − z2)
= z2 + p1(z3 − z2)+
+ 14
[−p1 +
p2
q2q1 −q1
p22 +q2
2
q2+[p1
p2
q2− p1
p22 +q2
2
q2+q1]ı
](z3 − z2). (11.6.18)
From the values of p22 +q2
2 and q2, and also of p2/q2 we have −q1p2
2+q22
q2+q1
p2q2
=
−q1(2p1−1)2
p21+q2
1
p21+q2
1q1(2p1−1) +q1
p1q1
=−(2p1 −1)+ p1 = 1− p1.
Similarly
p1p2
q2− p1
p22 +q2
2
q2=−p1
(2p1 −1)2
p21 +q2
1
p21 +q2
1
(2p1 −1)q1+ p1
p1
q1
=− p1
q1(2p1 −1)+ p1
p1
q1=−2p1
p1
q1+
p1
q1+ p1
p1
q1
= (1− p1)p1
q1.
Hence
z(ii)16 = z2 + p1(z3 − z2)+14
[−p1 +1− p1 +[(1− p1)
p1
q1+q1]ı
](z3 − z2)
= z2 +14
[4p1 +1−2p1 +[
p1
q1− p2
1 −q21
q1]ı
](z3 − z2)
= z2 +12
[12 + p1 +
12 [
p1
q1− p2
1 +q21
q1+2q1]ı
](z3 − z2). (11.6.19)
This is the same as (11.6.16) and so z(ii)16 = z′16.The reason we took the particular foot of a perpendicular Z8 is it simplify the
calculations a little, but the result holds just as well for the feet of the perpendicu-lars Z9 and Z10 as well. For we can give the simplifying to both of these as well as

222 Vector and complex-number methods Ch. 11
follows. Starting with our usual notation z1 = z2 +(p1 + ıq1)(z3 − z2) let us seek acorresponding relationship z3 = z1 +(p3 + ıq3)(z2 − z1) based on the same triangle.Then we have
(p3 +q3ı−1)z1 =−z3 +(p3 + ıq3)z2 = (p3 + ıq3 −1)z2 − (z3 − z2),
z1 = z2 +−1
p3 +q3ı−1(z3 − z2) = z2 +(p1 +q1ı)(z3 − z2),
p1 +q1ı =−1
p3 +q3ı−1,
p3 +q3ı−1 =−1
p1 +q1ı.p1 −q1ıp1 −q1ı
=−p1 +q1ı
p21 +q2
1
p3 −1 =−p1
p21 +q2
1
,
q3 =p1
p21 +q2
1
,
p3 = 1− p1
p21 +q2
1
=p2
1 +q21 − p1
p21 +q2
1
. (11.6.20)
11.6.11 The nine-point circle
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
��
�
�
�
�
�
�
Z11
Z1
Z2
Z3
Z′16
Z4
Z5
Z6Z8
Z9
Z10 = Z18
Z17
Z19
Figure 11.16. Nine-point circle.
We continue with the situation in 11.6.10 where we identified three further pointswhich lie on the circumcircle of the triangle [Z4,Z5,Z6] with vertices the midpointsZ4,Z5 and Z6 of the sides [Z2,Z3], [Z3,Z1], [Z1,Z2], respectively, of the original tri-angle Z1,Z2,Z3. In this subsection we identify three other points which lie on thiscircumcircle. Let Z17 be the mid-point of the orthocentre and the vertex Z1 in theoriginal triangle, Z18 be the mid-point of the orthocentre and the vertex Z2, and Z19
be the mid-point of the orthocentre and the vertex Z3. We seek the circumcentre ofthe triangle [Z4,Z8,Z18].

Sec. 11.6 Mobile coordinates 223
Now z4 = z2 +12(z3 − z2), z8 = z2 + p1(z3 − z2), and by the formula in 11.6.5 for
the orthocentre, z11 = z2 +p12
(1− p1−1
q1ı)(z3 − z2). From these we have that
z18 =12 [z2 + z2 + p1
(1− p1 −1
q1ı
)(z3 − z2) = z2 ++
12
p1(1− p1 −1q1
ı)(z3 − z2).
We let Z(iii)16 be the circumcentre of the triangle [Z4,Z8,Z18] and for the present write
z4 = z8 +(p4 + ıq4)(z18 − z8) = (1− p4 − ıq4)z8 +(p4 + ıq4)z18
= (1− p4 − ıq4)[z2 + p1(z3 − z2)]+ (p4 + ıq4)[z2 +12
p1(1− p1 −1q1
ı)](z3 − z2)
= (1− ıq4 + ıq4)z2 +
[(1− p4 − ıq4)p1 +(p4 + ıq4)
12
p1(1− p1 −1q1
)ı
](z3 − z2)
= z2 + p1
[1− p4 − ıq4 +
12(p4 + ıq4)[1− p1 −1
q1ı]
](z3 − z2)
= z2 + p1
[1− p4 −q4ı+ 1
2(p4 +q4ı)− 12(p4 +q4ı)
p1 −1q1
ı
](z3 − z2)
= z2 + p1
[1− 1
2 p4 − 12q4ı− 1
2 p4p1 −1
q1ı+ 1
2q4p1 −1
q1
](z3 − z2)
= z2 + p1
[1− 1
2 p4 +12q4
p1 −1q1
− 12(q4 + p4
p1 −1q1
)ı
](z3 − z2)
= z2 +12 (z3 − z2).
Hence
p1
[1− 1
2 p4 +12q4
p1 −1q1
− 12 (q4 + p4
p1 −1q1
)ı
]= 1
2
so that
q4 + p4p1 −1
q1= 0, p1
[1− 1
2 p4 +12 q4
p1 −1q1
]=
12.
Then q4 =− p1−1q1
p4 and
− 12 p1 p4 +
12
p1 −1q1
q4 =12− p1,−p4 +
p1 −1q1
q4 = (12 − p1)
2p1
,
−p4 − p1 −1q1
p1 −1q1
p4 =1p1
−2,−p4
[1+
(p1 −1)2
q21
]=
1−2p1
p1,
p4 =(2p1 −1)q2
1
p1(q21 +(p1 −1)2)
,
q4 =− p1 −1q1
2p1 −1p1
q21
[q21 +(p1 −1)2]
p24 +q2
4 =
[1+(
p1 −1p1
)2](2p1 −1)2
p21
q41
[q21 +(p1 −1)2]
.

224 Vector and complex-number methods Ch. 11
Then
p24 +q2
4 = p24 +(
(p1 −1)q1
)2 p24,
p24 +q2
4
q4=
p24
q4
(1+(
p1 −1q1
)2)
= p4.−q1
p1 −1
(1+(
p1 −1q1
)2)
=2p1 −1
p1
1
1+( p1−1q1
)2
−q1
p1 −1
(1+(
p1 −1q1
)2)
=−2p1 −1p1
q1
p1 −1.
By (11.6.4) the circumcentre Z(iii)16 of [Z4,Z8,Z18] where
z4 = z8 +(p4 +q4ı)(z18 − z8)
is given by
z(iii)16 = z8 +12
[1+
p24 +q2
4
q4ı− p4
q4ı
](z18 − z8)
= z8 +12
⎡⎣1+
p24(1+
(p1−1)2
q21
)
q4ı+
q1
p1 −1ı
⎤⎦(z18 − z8)
= z8 +12
[1+ p4
−q1
p1 −1
(1+
(p1 −1)2
q21
)ı+
q1
p1 −1ı
](z18 − z8)
= z8 +12
[1− 2p1 −1
p1
q1
p1 −1ı+
q1
p1 −1ı+
q1
p1 −1ı
](z18 − z8)
= z8 +12
[1+
q1
p1 −1
(−2p1 −1
p1+1
)ı
](z24 − z8)
= z8 +12 [1−
q1
p1ı](z18 − z8).
Continuing from this we have

Sec. 11.6 Mobile coordinates 225
z(iii)16 = z2 + p1(z3 − z2)+12(1−
q1
p1ı)[z2 +
12 p1(1− p1 −1
q1ı)− z2 − p1](z3 − z2)
= z2 + p1(z3 − z2)+12(1−
q1
p1ı)[1
2 p1(1− p1 −1q1
ı)− p1](z3 − z2)
= z2 +
[p1 +
12(1−
q1
p1ı)[
12
p1 − 12
p1(p1 −1)q1
ı− p1]
](z3 − z2)
= z2 + p1
[1+ 1
2(1−q1
p1ı)[− 1
2 − 12
p1 −1q1
ı]
](z3 − z2)
= z2 + p1
[1− 1
4(1−q1
p1ı)(1+
p1 −1q1
ı)
](z3 − z2
= z2 + p1
[1− 1
4 [1+q1
p1
p1 −1q1
+(p1 −1
q1− q1
p1)ı]
](z3 − z2)
= z2 + p1
[1− 1
4 [1+p1 −1
p1+
p21 − p1 −q2
1
p1q1ı]
](z3 − z2)
= z2 + p1
[1− 1
4
2p1 −1p1
− 14 [
p21 +q2
1 − p1
p1q1ı−2
q21
p1q1ı]
](z3 − z2)
= z2 +
[14 +
12 p1 − 1
4 [p2
1 +q21
q1− p1
q1−2q1]ı
](z3 − z2)
= z2 +14
[1+2p1 − p2
1 +q21
q1ı+
p1
q1ı+2q1ı
](z3 − z2).
By (11.6.16) this is the same as that for Z′16. The same argument applies to Z17
and Z19.Thus we have identified six extra points on the circle which passes through the
mid-points of the sides of the original triangle, which is named from this property.There is an interesting article on this circle in Wikipedia. By a coincidence we haveZ10 = Z18 in our diagram.
11.6.12 Parametric equations of lines.
For general distinct points Z4 and Z5 and general Z ∈ Z4Z5 we have that
z4 = z2 +(p4+q4ı)(z3 − z2), z5 = z2 +(p5 +q5ı)(z3 − z2), z = z2+(p+qı)(z3 − z2),
and then
z = z4 + s(z5 − z4) = (1− s)z4 + sz5, (s ∈ R)
= (1− s)[z2 +(p4 +q4ı)(z3 − z2)]+ s[z2 +(p5 +q5ı)(z3 − z2)]
= (1− s+ s)z2 +[(1− s)(p4 +q4ı)+ s(p5 +q5ı)](z3 − z2)
= z2 +{(1− s)p4 + sp5 +[(1− s)q4 + sq5]ı}(z3 − z2).

226 Vector and complex-number methods Ch. 11
11.7 SOME WELL-KNOWN THEOREMS
NOTE. The advantage of mobile coordinates is that they located a point with respectto a triangle using just two instead of three numbers and they also behave like re-scaled Cartesian coordinates. None the less they can lead to unwieldy expressions asin this section and it is a good idea when possible to check the algebraic manipula-tions using a computer software programme.
11.7.1 Feuerbach’s theorem, 1822
We recall that the nine-point circle has radius-length equal to the distance from Z′16
to Z4. From the formula
z′16 − z4 =12(p1 +q1ı)
[1− ı
2q1(p1 −1−q1ı)
](z3 − z2)
=1
4q1(p1 +q1ı)[q1 +(1− p1)ı](z3 − z2)
we note that
|z′16 − z4|= a4|q1| |p1 +q1ı||q1 +(1−p1)ı|= a
4|q1|√
p21 +q2
1
√(p1 −1)2 +q2
1,
and so this is the radius-length of the nine-point circle. We denote this radius lengthby r1.
Our formula in 11.6.5 for the incentre of a triangle is very awkward to applybecause of the complicated term in the denominator. However by eliminating thesurds in the denominator in two steps, by multiplying above and below by a conjugatesurd of the denominator, we obtain the more convenient formulation that
p1 +√
p21 +q2
1
1+√
p21 +q2
1 +√(p1 −1)2 +q2
1
=12+
12
√p2
1 +q21−
12
√(p1 −1)2 +q2
1. (11.7.1)
In fact once we know the form of this we can establish it more directly and easily bynoting that
12
[1+
√p2
1 +q21 +
√(p1 −1)2 +q2
1
][1+
√p2
1 +q21 −
√(p1 −1)2 +q2
1
]
= 12
[(1+
√p2
1 +q21
)2
− ((p1 −1)2 +q21
)]
= p1 +√
p21 +q2
1.
We note that the right-hand side in (11.7.1) must be positive.

Sec. 11.7 Some well-known theorems 227
Recalling from 11.6.5 that the incentre Z15 has complex coordinate
z15 = z2 +p1 +
√p2
1 +q21 +q1ı
1+√
p21 +q2
1 +√(p1 −1)2 +q2
1
(z3 − z2),
we re-write this as
z15 − z2
=12
[1+
√p2
1 +q21 −
√(p1 −1)2 +q2
1
]⎡⎣1+q1ı
p1 +√
p21 +q2
1
⎤⎦(z3 − z2)
=1
2q1
[1+
√p2
1 +q21 −
√(p1 −1)2 +q2
1
][q1 +
(√p2
1 +q21 − p1
)ı
](z3 − z2).
From this, the foot Z20 of the perpendicular from the incentre Z15 to the line Z2Z3 hascomplex coordinate
z20 = z2 +1
2q1
[1+
√p2
1 +q21 −
√(p1 −1)2 +q2
1
]q1(z3 − z2) (11.7.2)
and so the length of radius of the incircle is equal to
a2
[1+
√p2
1 +q21 −
√(p1 −1)2 +q2
1
][√p2
1 +q21 − p1
]. (11.7.3)
We denote this radius length by r2.
With these preparatory re-sults, we can now showthat the nine-point circleand the incircle meet atjust one point and theyhave a common tangentthere.
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
��
�
�
�
�
�
�
�
Z15
Z11
Z1
Z2
Z3
Z′16
Z4
Z5
Z6Z8
Z9
Z10 = Z18
Z17
Z19
Figure 11.17. Feuerbach’s theorem.
It is clear from diagrams that r1 > r2 and known from earlier proofs. We will firstgive the proof in this case and then a proof that r4 ≥ r1 cannot occur.
The half-line [Z′16,Z15 has points Z = Z′
16 + s(Z15 − Z′16) where s ≥ 0 and will
meet the nine-point circle at a point
z21 = z′16 +r1
|z15 − z′16|(z15 − z′16).

228 Vector and complex-number methods Ch. 11
It will also meet the nine-point circle at the point
z22 = z′16 −r1
|z15 − z′16|(z15 − z′16).
The mid-point of these two points is the centre Z′16 of the nine-point circle and so
[Z21,Z22] is a diameter of this nine-point circle.Similarly the half-line [Z15,Z′
16 has points Z = Z15 − t(Z′16 −Z15) and meets the
incircle at the point
z = z15 − r2
|z′16 − z15|(z′16 − z15).
Then clearly this is the point Z21 again and the corresponding point
z24 = z15 +r2
|z′16 − z15|(z′16 − z15)
will be a diametrically opposite point on the incircle. Then the nine-point circle andthe incircle have a common tangent at the point Z21.
It is clear from elementary geometry that, if two circles touch at just one point, thecentres of the two triangle and the point of tangency must be collinear. The followingis a skeleton picture of a possible situation.
�
�
�
�
�
Figure 11.18.
Now we turn to the supposition that r2 ≥ r1. We first suppose that r2 > r1. We treatthe incircle as above and take the point
z24 = z15 +r2
|z′16 − z15|(z′16 − z15).
Then Z24 is a point on the incircle and the point
z25 = z15 − r2
|z′16 − z15|(z′16 − z15).
is such that [z24,z25] is a diameter of the incircle.

Sec. 11.7 Some well-known theorems 229
For the nine-point circle we take the point Z26 such that
z26 = z′16 +r1
|z15 − z′16|(z′16 − z15),
Then Z26 is a point of the line Z′16Z15 which lies on the nine-points circle and the
corresponding point
z27 = z′16 −r1
|z15 − z′16|(z′16 − z15),
also lies on the nine-point circle for which [z26,z27] is a diameter. But in fact thepoints Z24 and Z26 coincide and we then have the situation that Z27 ∈ [Z24,Z25].
Thus we have that the incircle has diameter [Z24,Z25] and the nine-point circle hasdiameter [z24,z27] and [z24,z27] ⊂ [z24,z25]. It follows that the nine-point circle liesinside or on the the incircle. But the incircle lies inside or on the triangle [Z1Z2Z3]and it follows that the nine-points circle lies inside or on the triangle. But this yieldsa contradiction as the nine-points circle passes through the mid-points Z4,Z5,Z6 ofthe sides of this triangle.
There remains the case when r2 = r1 and now we must have Z′16 = Z15 and the
nine-points circle must coincide with the incircle. In this case the two circles do notmeet in a unique point.
This result is known as the basic form of Feuerbach’s theorem.
11.7.2 The Wallace-Simson line, 1797
We take a triangle [Z1,Z2,Z3] and for a point Z let W1,W2,W3 be the feet of the per-pendiculars from Z to the side-lines Z2Z3,Z3Z1,Z1Z2, respectively.
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
Z1
Z2
Z3
Z
W1
W2
W3
Figure 11.19(a). A right sensed duo-angle.
�
�
�
�
�
�
�
�
�
�
Z1
Z2
Z3
Z
W1W2
W3
(b). A Simson-Wallace line.
Using notation like that in 11.6.3?, we suppose that z1 − z2 = (p1 +q1ı)(z3 − z2), z−z2 = (p+qı)(z3 − z2). Then z = z2+ p(z3− z2)+qı(z3 − z2), and so w1 = z2 + p(z3−z2). Next w2 = z3+s(z1−z3), for some s ∈ R. Hence z−w2 = (p−1+qı)(z3 −z2)−

230 Vector and complex-number methods Ch. 11
s(z1 − z3). But z1 − z3 = (p1 − 1+ q1ı)(z3 − z2), so z3 − z2 = 1p1−1+q1ı(z1 − z3). On
inserting this, we have that z−w2 =[
p−1+qıp1−1+q1ı − s
](z1 − z3). We wish the coefficient
of z1 − z3 to be purely imaginary, and so take s = (p−1)(p1−1)+qq1
(p1−1)2+q21
. Hence w2 = z3 +
(p−1)(p1−1)+qq1
(p1−1)2+q21
(z1 − z3).
Thirdly, w3 = z2 + t(z1 − z2),for some t ∈ R. Hence z−w3 = (p+ qı)(z3 − z2)−t(z1 − z2). But z3 − z2 = 1
p1+q1ı(z1 − z2) and so z−w3 =[
p+qıp1+q1ı − t
](z1 − z2). We
choose t so that the coefficient of z1 − z2 is purely imaginary. Thus t = pp1+qq1
p21+q2
1which
yields w3 = z2 +pp1+qq1
p21+q2
1(z1 − z2).
From these expressions for w1,w2,w3 we note that
w2 −w1
w3 −w1=
z3 − z2 +(p−1)(p1−1)+qq1
(p1−1)2+q21
(z1 − z3)− p(z3 − z2)
pp1+qq1
p21+q2
1(z1 − z2)− p(z3 − z2)
=1− p+ (p−1)(p1−1)+qq1
(p1−1)2+q21
(p1 −1+q1ı)pp1+qq1
p21+q2
1(p1 +q1ı)− p
.
The real part of this has numerator (p21 +q2
1 − p1)(p2 +q2)− (p21 +q2
1 − p1)p+q1q,and the imaginary part has numerator q1(p2 + q2)− q1 p− (p2
1 + q21 − p1)q. If θ =
�F ′W3W1W2 then for θ to have a constant magnitude it is necessary and sufficientthat
q1(p2 +q2)−q1p− (p21 +q2
1 − p1)q
= k[(p21 +q2
1 − p1)(p2 +q2)− (p21 +q2
1 − p1)p+q1q].
This can be re-written as
a2
[(p− 1
2
)2
+
(q− p2
1 +q21 − p1
2q1
)2]− a2
4
[1+
(p21 +q2
1 − p1)2
q21
]
=k(p2
1 +q21 − p1)
q1
{a2
[(p− 1
2
)2
+
(q+
q1
2(p21 +q2
1 − p1)
)2]
− a2
4
[1+
q21
(p21 +q2
1 − p1)2
]}.
On using 11.6.1 we infer that as k varies this gives the family of coaxal circles whichpass through Z2 and Z3.
For W1,W2,W3 to be collinear, it is necessary and sufficient that the expressionbe real. On equating its imaginary part to 0 we obtain q1(p2 + q2)− q1 p− (p2
1 +
q21 − p1)q = 0. On writing this as p2+q2−p
q =p2
1+q21−p1
q1, we note from the formula
for a circumcentre in 11.6.4? that it holds when Z lies on the circumcircle of thetriangle[Z1,Z2,Z3].
This latter result is due to Wallace, but Simson’s name has for a long time beenassociated with it.

Sec. 11.7 Some well-known theorems 231
11.7.3 The incentre on the Euler line of a triangle
We suppose that we have the mobile coordinates z1 − z2 = (p1 +q1ı)(z3 − z2), wherep1 and q1 are real numbers and q1 �= 0. Then z1 − z3 = (p1 −1+q1ı)(z3 − z2), and asin 11.6.3 we have
z1 − z2
z3 − z2= p1 +q1ı =
ca
cis β ,z2 − z3
z1 − z3=
1− p1 +q1ı
(1− p1)2 +q21
=ab
cis γ ,
z3 − z1
z2 − z1=
p1 −1+q1ıp1 +q1ı
=bc
cis α ,
where we are using our standard notation. Then p21 + q2
1 = c2
a2 , (1− p1)2 + q2
1 = b2
a2 .We recall that the orthocentre, centroid and incentre have mobile coordinates p1 +p1(1−p1)
q1ı, p1+1
3 + q13 ı,
p1+√
p21+q2
1+q1ı
1+√
p21+q2
1
√(1−p1)2+q2
1
respectively.
Now 1 − 2p1 = b2−c2
a2 , p1 = c2+a2−b2
2a2 ,1 − p1 = a2+b2−c2
2a2 , p1 + 1 = c2+a2−b2+2a2
2a2 .Moreover
q21 =
c2
a2 − p21 =
c2
a2 −(
c2 +a2 −b2
2a2
)2
=−(c2 +a2 −b2)2 −4c2a2
4a4
= − [(c+a)2 −b2][(c−a)2 −b2]
4a4 ,
while
p1 +√
p21 +q2
1 =c2 +a2 −b2
2a2 +ca=
(c+a)2 −b2
2a2 ,
1+√
p21 +q2
1 +√(1− p1)2 +q2
1 = 1+ca+
ba=
a+b+ ca
,
so that
p1 +√
p21 +q2
1
1+√
p21 +q2
1 +√(1− p1)2 +q2
1
=(c+a)2 −b2
2a(a+b+ c)=
c+a−b2a
,
q21
1+√
p21 +q2
1 +√(1− p1)2 +q2
1
=− 14a3
[(c+a)2 −b2][(c−a)2 −b2]
a+b+ c
=− 14a3 (c+a−b)[(c−a)2 −b2].
The determinant for collinearity, on multiplying the middle column by q1, is∣∣∣∣∣∣∣∣∣c2+a2−b2
2a2(c2+a2−b2)(a2+b2−c2)
4a4 1c2+a2−b2+2a2
6a2 − [(c+a)2−b2][(c−a)2−b2]12a4 1
c+a−b2a − (c+a−b)[(c−a)2−b2]
4a3 1
∣∣∣∣∣∣∣∣∣,

232 Vector and complex-number methods Ch. 11
and this is a non-zero multiple of
∣∣∣∣∣∣∣∣c2 +a2 −b2 (c2 +a2 −b2)(a2 +b2 − c2) 1
c2 +a2 −b2 +2a2 −[(c+a)2 −b2][(c−a)2 −b2] 3a(c+a−b) −a(c+a−b)[(c−a)2 −b2] 1
∣∣∣∣∣∣∣∣,
the value of which is 4(ca5 − c3a3 −ba5 +a3b3 + c3ba2 −b3ca2). This factorizes as4a2(b− c)(c− a)(a− b)(a+ b+ c) and so the incentre lies on the Euler line if andonly if the triangle is isosceles.
11.7.4 Miquel’s theorem, 1838
�
�
�
�
�
�
�
Z1
Z2
Z3
Z4
Z5
Z6
Figure 11.20(a). Miquel’s theorem.
�
�
�
�
��
�
Z1
Z2
Z3
Z4
Z5
Z6
Figure 11.20(b). Miquel’s theorem.
Let Z1,Z2,Z3 be non-collinear points, and Z4 ∈ Z2Z3, Z5 ∈ Z3Z1, Z6 ∈ Z1Z2 be distinctfrom Z1,Z2 and Z3. Let C1, C2, C3 be the circumcircles of [Z1,Z5,Z6], [Z2,Z6,Z4],[Z3,Z4,Z5], respectively. Then C1, C2, C3 have a point in common.
Proof . Suppose that these circles have centres the points W1,W2,W3, respectively.We first assume that C2 and C3 meet at a second point Z7 �= Z4. If Z7 = Z6 the result
is trivially true, so we may exclude that case. As Z1,Z2,Z6 are collinear, we have z1−z6 =−ν(z2 − z6),for some non-zero ν in R. As Z2,Z4,Z6,Z7 are concyclic, by 10.9.3we have z2−z6
z7−z6= ρ z2−z4
z7−z4, for some non-zero ρ in R. As Z2,Z3,Z4 are collinear, we have
z2 − z4 = −λ (z3 − z4), for some non-zero λ in R. As Z3,Z4,Z5,Z7 are concyclic,we have z3−z4
z7−z4= σ z3−z5
z7−z5, for some non-zero σ in R. On combining these we have
z1−z6z7−z6
= νρλσ z3−z5z7−z5
. It follows by 10.9.3 that Z1,Z5,Z6,Z7 are concyclic.We suppose secondly that C2 and C3 have a common tangent at Z2. It is convenient
to suppose that z1 = z2 +(p1 + ıq1)(z3 − z2) and w2 = z2 +(p+ ıq)(z3 − z2). Thenthe foot Z7 of the perpendicular from W2 to Z2Z3 has complex coordinate z7 = z2 +p(z3 − z2), and hence z4 = z2 +2p(z3 − z2). Then the mid-point Z8 of Z3 and Z4 hascomplex coordinate z8 = z2 +(p+ 1
2)(z3 − z2). It follows that for the centre W3 of C3

Sec. 11.7 Some well-known theorems 233
we have w3 = z2 +(p+ 12 + ıq′)(z3 − z2), for some real number q′. But Z4,W2,W3 are
collinear, so that ∣∣∣∣∣∣2p 0 1p q 1
p+ 12 q′ 1
∣∣∣∣∣∣= 0,
and from this q′ = p− 12
p qı(z3 − z2). Hence w3 = z2 +(
p+ 12 +
p− 12
p qı)(z3 − z2). From
this w3 − z3 =p− 1
2p (p+ qı)(z3 − z2), and since z3 − z2 =
1p1−1+ıq1
(z1 − z3), we have
w3 = z3 +p− 1
2p
(p+ıq)(p1−1−ıq1)(p1−1)2+q2
1(z1 − z3). Thus if Z9 is the foot of the perpendicular
from W3 to Z3Z1, we have z9 = z3 +p− 1
2p
p(p1−1)+qq1
(p1−1)2+q21(z1 − z3), and so
z5 = z3 +2p−1
pp(p1 −1)+qq1
(p1 −1)2 +q21
(z1 − z3).
Similarly w2 = z2 +(p+ ıq)(z3 − z2),z3 − z2 =1
p1+ıq1(z1 − z2), and so w2 = z2 +
(p+ıq)(p1−ıq1)p2
1+q21
(z1 − z2). It follows that for the foot Z10 of the perpendicular from W2 to
Z1Z2 we have z10 = z2 +pp1+qq1
p21+q2
1(z1 − z2), and so z6 = z2 +2 pp1+qq1
p21+q2
1(z1 − z2).
We have
z1 − z5 =
[1− 2p−1
pp(p1 −1)+qq1
(p1 −1)2 +q21
](z1 − z3),
z1 − z6 =
[1−2
pp1 +qq1
p21 +q2
1
](z1 − z2),
z4 − z6 = 2p(z3 − z2)−2pp1 +qq1
p21 +q2
1
(z1 − z2)
= 2
[p− pp1 +qq1
p21 +q2
1
(p1 + ıq1)
](z3 − z2),
z4 − z5 =
[(2p−1)(z3 − z2)− 2p−1
pp(p1 −1)+qq1
(p1 −1)2 +q21
(z1 − z3)
]
=2p−1
p
[p− p(p1 −1)+qq1
(p1 −1)2 +q21
(p1 −1+q1)
](z3 − z2).
As z1 − z2 = (p1 + ıq1)(z3 − z2), from these combined we have that (z1−z5)(z4−z6)(z1−z6)(z4−z5)
is areal multiple of[
p− pp1+qq1
p21+q2
1(p1 + ıq1)
](p1 −1+ ıq1)[
p− p(p1−1)+qq1
(p1−1)2+q21(p1 −1+ ıq1)
](p1 + ıq1)
=
[p− pp1+qq1
p1−ıq1
](p1 −1+ ıq1)[
p− p(p1−1)+qq1p1−1−ıq1
](p1 + ıq1)
=−q1(ıp+q)[(p1 −1)2 +q2
1]
−q1(ıp+q)[p21 +q2
1]=
(p1 −1)2 +q21
p21 +q2
1
,
and this is real. It follows that Z1,Z4,Z5,Z6 are concyclic. This is known asMiquel’s theorem.

234 Vector and complex-number methods Ch. 11
11.8 ISOGONAL CONJUGATES
11.8.1 Isogonal conjugates
Definition. Given non-collinear points Z1,Z2,Z3, we say that half-lines [Z1,Z4
[Z1,Z5 are isogonal conjugates with respect to the angle-support |Z2Z1Z3 if thesensed angles �F Z2Z1Z4, �F Z5Z1Z3, have equal magnitudes.
�
�
�
�
�
�
�
�
Z1
Z2
Z3
Z4
Z5
Figure 11.21. Isogonal conjugates.
To see how this operates, we first suppose that Z4 and Z5 are both on the line Z2Z3
and that
Z4 =1
1+λ1Z2 +
λ1
1+λ1Z3, Z5 =
11+λ2
Z2 +λ2
1+λ2Z3,
for real numbers λ1 and λ2. We recall that then
Z2Z4
Z4Z3= λ1,
Z2Z5
Z5Z3= λ2.
Then
z4 − z1
z2 − z1/
z3 − z1
z5 − z1=
11+λ1
z2 +λ1
1+λ1z3 − z1
z2 − z1
11+λ2
z2 +λ2
1+λ2z3 − z1
z3 − z1
is positive and so on multiplying across by (1+λ1)(1+λ2)
z2 − z1 +λ1(z3 − z1)
z2 − z1
z2 − z1 +λ2(z3 − z1)
z3 − z1
=z2 − z1
z3 − z1+λ1λ2
z3 − z1
z2 − z1+λ1 +λ2
is real. On subtracting λ1 +λ2 it follows that
z2 − z1
z3 − z1+λ1λ2
1(z2 − z1)/(z3 − z1)
is real. We writez2 − z1
z3 − z1= u+ vı, (u,v ∈ R),

Sec. 11.8 Isogonal conjugates 235
where v �= 0 as Z1 �∈ Z2Z3. With this notation we have that u+ vı+λ1λ2u−vı
u2+v2 is real
so that v−λ1λ2v
u2+v2 = 0, and hence λ1λ2 = u2 + v2. We deduce that λ1λ2 =|Z1,Z2|2|Z3,Z1|2
.
As λ1λ2 > 0, the points Z4 and Z5 must be both in [Z2,Z3] or both in Z2Z3 \ [Z2,Z3].
11.8.2 Concurrency
Given non-collinear points Z1,Z2,Z3, suppose now that for Z4,Z5 ∈ Z2Z3 the half-lines [Z1,Z4 , [Z1,Z5 are isogonal conjugates with respect to the angle-support|Z2Z1Z3, for Z6,Z7 ∈ Z3Z1 the half-lines [Z2,Z6 , [Z2,Z7 are isogonal conjugates withrespect to the angle-support |Z3Z2Z1, and for Z8,Z9 ∈ Z1Z2 the half-lines [Z3,Z8 ,[Z3,Z9 are isogonal conjugates with respect to the angle-support |Z1Z3Z2. Then by
11.8.1, with an obvious notation we have λ4λ5μ6μ7ν8ν9 = |Z1,Z2|2|Z2,Z3|2|Z3,Z1|2|Z3,Z1|2|Z1,Z2|2|Z2,Z3|2
= 1.
Now if Z1Z4, Z2Z6, Z3Z8 are concurrent, by Ceva’s theorem we have λ4μ6ν8 = 1. Itfollows that λ5μ7ν9 = 1, which is the condition (11.5.1) for Z1Z5,Z2Z7,Z3Z9. Then iftwo of these are concurrent, the third must pass through their point of intersection.
11.8.3 Symmedians
If in 11.8.2 [Z1,Z4 , [Z2,Z6 , [Z3,Z8 are the median half-lines of [Z1,Z2,Z3], thentheir isogonal conjugates [Z1,Z5 , [Z2,Z7 , [Z3,Z9 are called the symmedians of thetriangle. Now the mid-points Z4,Z6,Z8 lie in the segments [Z2,Z3], [Z3,Z1], [Z1,Z2],respectively. Hence the points Z5,Z7,Z9 lie in the segments [Z2,Z3], [Z3,Z1], [Z1,Z2],respectively. By the cross-bar theorem the symmedian lines Z1Z5,Z2Z7 must meet andthen Z3Z9 must pass through their point of intersection. This point of concurrency iscalled the symmedian point of the triangle.To identify the symmedians fur-ther, suppose that O be the cen-tre of the circumcircle of thetriangle [Z1,Z2,Z3], and W1 themid-point of {Z2,Z3}. Let theline OW1 meet the circumcir-cle, on the opposite side of Z2Z3
from Z1, at the point U1, [Z1,W1
meet the circle again at Z4, andthe line through Z4 parallel toZ2Z3 meet the circle again at Z5.Then |Z2Z1Z3 and |Z4Z1Z5 havethe same mid-line Z1U1 as eachother. Thus [Z1,Z5 is isogonalconjugate of the median half-line [Z1,Z4 and so is the corre-sponding symmedian.
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
Z1
Z2
Z3
O
U1
Z4
Z5
W1
Figure 11.22. Symmedians.

236 Vector and complex-number methods Ch. 11
Exercises
11.1 Show that if Z1 �= Z2, the points Z on the perpendicular bisector of [Z1,Z2] arethose for which
−→OZ = 1
2 (−−→OZ1 +
−−→OZ2)+ t(
−−→OZ2 −−−→
OZ1)⊥, for some t ∈ R.
11.2 If l = Z1Z2, then Z4 = πl(Z3) if and only if Z4 = Z1 + s(Z2 −Z1) where
s =(−−→OZ3 −−−→
OZ1).(−−→OZ2 −−−→
OZ1)
‖−−→OZ2 −−−→OZ1‖2
,
and also if and only if−−→OZ4 =
−−→OZ3 + t(
−−→OZ2 −−−→
OZ1)⊥, where
t =−(−−→OZ3 −−−→
OZ1).(−−→OZ2 −−−→
OZ1)⊥
‖−−→OZ2 −−−→OZ1‖2
.
11.3 If l = Z1Z2, then Z4 = sl(Z3) if and only if−−→OZ4 =
−−→OZ3+ t(
−−→OZ2−−−→
OZ1)⊥, where
t =−2(−−→OZ3 −−−→
OZ1).(−−→OZ2 −−−→
OZ1)⊥
‖−−→OZ2 −−−→OZ1‖2
.
11.4 If Z2 �∈ [Z0,Z1 and l is the mid-line of the angle support |Z1Z0Z2, then Z ∈ l ifand only if
−→OZ =
−−→OZ0
+t
[1
‖−−→OZ2 −−−→OZ0‖
(−−→OZ2 −−−→
OZ0)− 1
‖−−→OZ1 −−−→OZ0‖
(−−→OZ1 −−−→
OZ0)
]⊥,
for some t ∈ R.
11.5 Prove that−→OZ
′ −−−→OZ1 = cos α(
−→OZ −−−→
OZ1)+ sin α(−→OZ −−−→
OZ1)⊥, represents a
rotation about the point Z1, through the angle α .
11.6 For any vector−→OZ, with Z ≡F (x,y), define
−→OZ
�=
−→OU ,
−→OZ
�=
−→OV ,
where U ≡F (x,−y), V ≡F (y,x), so that U = sOI(Z), V = sl(Z), l being themid-line of |IOJ. Prove that
(i)
(−−→OZ1 +
−−→OZ2)
� =−−→OZ1
�+−−→OZ2
�,
(ii)(k−→OZ)� = k(
−→OZ)�,

Sec. 11.8 Isogonal conjugates 237
(iii)
(−→OZ
�)� =
−→OZ,
(iv)
(−−→OZ1 +
−−→OZ2)
� =−−→OZ1
�+−−→OZ2
�,
(v)(k−→OZ)� = k(
−→OZ)�,
(vi)
(−→OZ
�)� =
−→OZ,
(vii)
(−→OZ
�)� =
−→OZ
⊥,
(viii)
(−→OZ
�)� =−−→
OZ⊥.
Prove that axial symmmetry in the line through the origin, with angle of incli-
nation α , is given by−−→OZ′ = cos2α
−→OZ
�+ sin2α
−→OZ
�.
11.7 For non-collinear points Z1,Z2,Z3, suppose that
−−→OZ4 =
−−→OZ2 +(
−−→OZ1 −−−→
OZ2)⊥,
−−→OZ5 =
−−→OZ2 − (
−−→OZ3 −−−→
OZ2)⊥.
Show that then Z1Z5 ⊥ Z3Z4, and in fact
−−→OZ5 −−−→
OZ1 =(−−→
OZ4 −−−→OZ3
)⊥.
11.8 Prove that δF (Z1,Z2,Z3)+δF (Z1,Z4,Z3) = δF (Z1,Z5,Z3), where(Z1,Z2) ↑ (Z4,Z5).
11.9 If a point Z be taken on the circumcircle of an equilateral triangle[Z1,Z2,Z3], prove that when Z is on the opposite side of Z2Z3 from Z1, |Z,Z1|=|Z,Z2|+ |Z,Z3|.
11.10 For a triangle [Z1,Z2,Z3], if Z4 is the foot of the perpendicular from Z1 to Z2Z3,show that Z4 is the mid-point of the orthocentre and the point where the lineZ1Z4 meets the circumcircle again.
11.11 Deduce the Pasch property of a triangle from Menelaus’ theorem.

This page intentionally left blank

12
Trigonometric functions incalculus
COMMENT. In 3.7.1 and 9.3.1 we extended degree-measure to reflex angles, butthe only use we have made of this hitherto has been for the purposes of notation inChapter 9. In this chapter we relate it to the length of an arc of a circle, definingπ in the process. In doing this we make a start on calculus for the cosine and sinefunctions, introduce radian measure of angles and can go on to derive Maclaurinseries. We also derive the area of a disk. In doing this we assume from the calculusdefinition of the length of a rectifiable curve, the Riemann integral and a formula forarea in terms of a line integral; this is done so as to save labour, although it would bepossible to handle arc-length of a circle and the area of a disk more elementarily.
12.1 REPEATED BISECTION OF ANANGLE
12.1.1
Addition ⊕ is associative on A ∗(F ).Proof . On using 9.3.2 instead of 9.3.3, as in the proof of 9.3.3(iii) we see that
cos[(α ⊕β )⊕ γ ] = cos[α ⊕ (β ⊕ γ)],sin[(α ⊕β )⊕ γ ] = sin[α ⊕ (β ⊕ γ)].
Thus (α ⊕ β )⊕ γ and α ⊕ (β ⊕ γ) are the angles in A ∗(F ) with the same cosineand the same sine, so they are the same angle except perhaps when P3 = Q and eitherangle could be 0F or 360F . Thus (α ⊕β )⊕ γ = α ⊕ (β ⊕ γ), except perhaps wheneither side is a null or full angle. But when each of α ,β ,γ is 0F , then each of (α ⊕β )⊕ γ , α ⊕ (β ⊕ γ) is 0F and so they are equal. If any of α ,β ,γ is non-null, andeither of (α ⊕β )⊕ γ , α ⊕ (β ⊕ γ) is 0F or 360F then both of them must be 360F ,and again they are equal.
Geometry with Trigonometry
© 2016 Elsevier Ltd. All rights reserved. http://dx.doi.org/10.1016/B978-0-12-805066-8.50012-4

240 Trigonometric functions in calculus Ch. 12
Definition . Given any angle α ∈ A ∗(F ), in 9.4.1 we defined 12α . Now for any
integer n ≥ 1, 12n α is defined inductively by
121 α =
12
α , and for all n ≥ 1,1
2n+1 α =12[
12n α ].
For all α ∈ A ∗(F ), |12 α |◦ = 1
2 |α |◦.Proof . We use the notation of 9.4.1. From the definition of midlQOP this is im-
mediate when P ∈ H1, so we suppose that P ∈ H2, P �= S, P �= Q. Then
|α |◦ = 180+ |∠SOP|◦ = |∠QOP′|◦+ |∠P′OS|◦+ |∠SOP|◦= |∠QOP′|◦+ |∠P′OP|◦ = 2|∠QOP′|◦
by 3.7.1.
For this, note that [P,P′] meetsOQ in a point G. If H =mp(Q,P), then P′ ∈ OH andif H5,H6 are the closed half-planes with common edge OH ,with Q ∈ H5, then as H ∈ [Q,P]we have P ∈ H6. Then [P′,P] ⊂H6 so G ∈ H6. But [O,Q ⊂H5, [O,S ⊂ H6 so G ∈ [O,S .Thus [O,S ⊂ I R(|P′OP).
� � � ��
�
�
�
�
�
P
P′
G
H
O
JQI
R
S
T
i(α)
αH1H2
H3H4
H5
H6
Figure 12.1.
If α ,β ∈ A ∗(F ) are such that|α |◦+ |β |◦ ≤ 360, then
12(α ⊕β ) = 1
2α ⊕ 12β .
Proof . By the commutativityand associativity of ⊕,
(12 α ⊕ 1
2β )⊕ (12α ⊕ 1
2β )= (1
2 α ⊕ 12α)⊕ (1
2β ⊕ 12β )
= α ⊕β ,
so we show that under the con-dition |α |◦+ |β |◦ ≤ 360, if 1
2α ⊕12β has support |QOP′
3 then P′3 ∈
H1.
� � � ��
�
�
�
�
�
�
�
�
�
�
��
�
�
�
� W
P′1
P′2
P′3 = N
P1
P2P3
O
J
QI
R
S
T
H1
H2
H3H4
Figure 12.2.
Let [O,P′1 = i(α), [O,P′
2 = i(β ) with |O,P′1|= |O,P′
2|= |O,Q|= k. Then 12α and
12β are the angles in A ∗
Fwith supports |QOP′
1, |QOP′2, respectively.

Sec. 12.2 Circular functions 241
Without loss of generality we suppose that |α |◦ ≤ |β |◦, so that by the above,|1
2α |◦ ≤ |12β |◦. As |1
2α |◦+ |12β |◦ ≤ 180, then |1
2 α |◦ ≤ 90, |12β |◦ ≤ 180, so that P′
1 ∈H1, P′
2 ∈ H1 and [O,P′1 ⊂ I R(|QOP′
2). Let the angle in A ∗(F ) with degree mea-
sure 12 (|α |◦+ |β |◦) have support |QON where |O,N|= k. Then as 1
2(|α |◦+ |β |◦) ≤180 we have N ∈ H1.
Let the angle in A ∗(F ) with degree measure 14(|α |◦+ |β |◦) have support |QOW,
where |O,W|= k. Then W ∈H1 and [O,P′1 ⊂I R(|QOW) as 1
2 |α |◦ ≤ 14(|α |◦+ |β |◦).
Thus
|∠P′1OW|◦ = |∠QOW|◦ − |∠QOP′
1|◦ = 14(|α |◦+ |β |◦)− 1
2 |α |◦ = 14(|β |◦ − |α |◦).
As 14(|α |◦+ |β |◦)≤ 1
2 |β |◦ we have [O,W ⊂ I R(|QOP′2). Then
|∠WOP′2|◦ = |∠QOP′
2|◦ − |∠QOW|◦ = 12 |β |◦ − 1
4(|α |◦+ |β |◦) = 14(|β |◦ − |α |◦).
As |∠P′1OW|◦ = |∠WOP′
2|◦ we have OW = midlP′1OP′
2.By a similar argument
|∠QOW|◦ = 14(|α |◦+ |β |◦) = |∠WON|◦,
so OW = midlQON. Then N = sOW (Q) and so 12α ⊕ 1
2β has support |QON.When 1
2(|α |◦+ |β |◦) < 180 this gives that P′3 = N and so 1
2 α ⊕ 12β = 1
2(α ⊕β ).The remaining case is when |α |◦+ |β |◦ = 360. Then 1
2(|α |◦+ |β |◦) = 180 so 12 α ⊕
12β = 180F , while α ⊕β = 360F so 1
2 (α ⊕β ) = 180F .
COROLLARY 1 . If α ,β ∈ A ∗(F ) are such that |α |◦+ |β |◦ ≤ 360, then for allintegers n ≥ 1,
12n (α ⊕β ) =
12n α ⊕ 1
2n β .
COROLLARY 2 . If α ,β ∈ A ∗(F ) are such that |α |◦+ |β |◦ ≤ 360, then
|α ⊕β |◦ = |α |◦+ |β |◦.
Proof . In the course of the proof we saw that, under the given conditions,
|12α ⊕ 1
2β |◦ = 12(|α |◦+ |β |◦), 1
2α ⊕ 12β = 1
2(α +β ).
From these |12(α ⊕β )|◦ = 1
2 (|α |◦+ |β |◦), so that |α ⊕β |◦ = |α |◦+ |β |◦.
12.2 CIRCULAR FUNCTIONS
12.2.1
Definition . Let x ∈ R satisfy 0 ≤ x ≤ 360. Then if for α ∈A ∗(F ) we have |α |◦ = x,we write c(x) = cosα , s(x) = sinα . By 9.6, c and s do not depend on F .

242 Trigonometric functions in calculus Ch. 12
The functions c and s have the following properties:-
(i) For 0 ≤ x ≤ 360,0 ≤ y ≤ 360,x+ y ≤ 360,
c(x+ y) = c(x)c(y)− s(x)s(y), s(x+ y) = s(x)c(y)+ c(x)s(y).
(ii) For 0 ≤ x ≤ 360, c(x)2 + s(x)2 = 1.
(iii) For 0 ≤ x ≤ 360, c(x) = 1−2s(12x)2, s(x) = 2c(1
2 x)s(12 x).
Proof . These follow immediately from the definition of c and s, and the formulaefor cos(α ⊕β ) and sin(α ⊕β ).
Definition . For 0 ≤ x ≤ 360 and integers n ≥ 3, let
un(x) = 2ns( x
2n+1
), vn(x) = 2n s
(x
2n+1
)c(
x2n+1
) .COMMENT. When n ≥ 1, un is the sum of the areas of 2n+1 non-overlapping
congruent triangles, each having its vertex at the centre of the circle/arc with radiuslength 1, and each having the end-points of its base on the circle/arc.
� �
��
�
�
��
�
�
�
�
�
� �
�
��
�
�
�
�
�
� �
�
�
�
�
�
�
�
�
�
�
�
�
�
Figure 12.3.
� �
�
�
�
���
�
�
�
�
�
�
�
�
��
��
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
��
�
�
�
�
�
�
�
�
When n ≥ 1, vn is the sum of the areas of 2n non-overlapping congruent triangles,each having its vertex at the centre of the circle/arc, and each having its base-line atangent to the circle/arc. Our reason for taking n ≥ 3 is that then
x2n+1 ≤ 360
16= 22.5 < 45.
� �
�
�
��
�
�
�
�
�
� �
�
�
�
�
��
�
�
�
�
�
�
�
�
�
�
�
�
�
Figure 12.4
� �
�
��
�
�
�
�
�
��
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
��
�
�
�
�
�
�
�
�

Sec. 12.2 Circular functions 243
The sequences un,vn have the following properties:-
(i) (un) is non-decreasing.
(ii) (vn) is non-increasing.
(iii) For 0 < x ≤ 360 and n ≥ 2, we have 0 < un(x)≤ vn(x).
(iv) As n → ∞,un(x) and vn(x) tend to a common limit μ(x) and
un(x)≤ μ(x) ≤ vn(x).
Proof .(i) For
un(x) = 2n+1s( x
2n+2
)c( x
2n+2
)≤ un+1(x).
(ii) For
vn(x) =2n+1s
(x
2n+2
)c(
x2n+2
)2c(
x2n+2
)2 −1= vn+1(x)
c(
x2n+2
)2
2c(
x2n+2
)2 −1> vn+1(x)
as c( x2n+2 )
2 < 1 and so 2c( x2n+2 )
2 −1 < c( x2n+2 )
2, while c( x2n+1 )> 0 and thus
2c( x2n+2 )
2 −1 > 0.(iii) For
un(x) = vn(x)c( x
2n+1
)≤ vn(x).
(iv) By (i), (ii) and (iii), un(x) ≤ v3(x) so we have a non-decreasing sequencewhich is bounded above. Hence there is some μ(x) such that limn→∞ un(x) = μ(x). Itfollows that s( x
2n+1 )→ 0 (n → ∞) and hence
c( x
2n+1
)= 1−2s
( x2n+2
)2→ 1 (n → ∞).
But thenvn(x)un(x)
= c( x
2n+1
)−1→ 1 (n → ∞),
and so as well limn→∞ vn(x) = μ(x). As un(x) is non-decreasing and vn(x) is non-increasing we must have un(x)≤ μ(x)≤ vn(x).
For x ≥ 0, y ≥ 0, x+ y ≤ 360,
μ(x+ y) = μ(x)+μ(y).
Proof . For
un(x+ y) = 2ns
(x+ y2n+1
)= 2ns
( x2n+1 +
y2n+1
)= 2ns
( x2n+1
)c( y
2n+1
)+ c
( x2n+1
)2ns
( y2n+1
)→ μ(x).1+1.μ(y) (n → ∞).

244 Trigonometric functions in calculus Ch. 12
COMMENT. This equation for μ is referred to as Darboux’s functional equa-tion.
There is a number p > 0 such that for 0 ≤ x ≤ 360, μ(x) = px.Proof . We start by writing out a well known proof that any function μ which
satisfies Darboux’s functional equation on [0,360] satisfies μ(r) = rμ(1) for all ra-tional numbers r in [0,360]. On first taking y = x we have μ(2x) = 2μ(x); then takingy = 2x, we get μ(3x) = 3μ(x); next taking y = 3x, we get μ(4x) = 4μ(x); and pro-ceeding this way we evidently get
μ(nx) = nμ(x) for all n ∈ N and 0 ≤ x ≤ 360n
.
This can be confirmed by induction on n.On applying this with n = m, x = 1/m for any m ∈ N we deduce that
μ(1) = mμ(
1m
)
so that
μ(
1m
)=
1m
μ(1).
Now on taking n and x = 1/m we see that
μ( n
m
)= μ
(n.
1m
)= nμ
(1m
)= n.
1m
μ(1) =nm
μ(1).
Thus μ(r) = rμ(1) for every rational number r with 0 < r ≤ 360, and this extendsto the case r = 0 also as putting x = y = 0 in Darboux’s functional equation givesμ(0) = 0.
It remains to show that μ(y) = yμ(1) for each irrational number y with 0 < y <360. Choose a decreasing sequence of rational numbers tn(y) which converge to y.By the case for rational numbers, we have μ(tn) = tnμ(1). Now tn = (tn − y)+ y soby Darboux’s functional equation
μ(tn) = μ(tn − y)+μ(y),
and soμ(y) = tnμ(1)−μ(tn − y).
We wish to make n → ∞ in this and take limits.Now as defined μ(z)> 0 for 0< z< 360. Then if 0< x< y < 360 as μ(x)+μ(y−
x) = μ(y) and μ(y− x) > 0, we must have μ(x) < μ(y). Thus μ is an increasingfunction. Hence as z decreases to 0, μ(z) decreases and is positive and so the one-sided limit
l = limz→0+
μ(z) = limz→0,z>0
μ(z)

Sec. 12.3 Derivatives of cosine and sine functions 245
must exist. But the formula μ(1n ) =
μ(1)n shows that μ(1
n ) → 0 (n → ∞) and so wemust have l = 0. As tn − y → 0 it follows that μ(tn − y)→ 0 (n → ∞) and then
limn→∞
μ(y) = limn→∞
[tnμ(1)]+ limn→∞
μ(tn − y)
yields μ(y) = yμ(1)+0.To conclude we take p = μ(1) and note that this is positive as shown above.
12.2.2 Definition of π
Definition . We denote μ(360) by π . Then 360p = π so that p = π360 and so
μ(x) =π
360x.
12.3 DERIVATIVES OF COSINE AND SINEFUNCTIONS
12.3.1
With the notation of 12.1,
limt→0+
s(t)t
=π
180.
Proof . We have seen above that for 0 < x ≤ 360, taking n = 2 in 12.2.1(iv),
0 < s( x
8
)≤ π
180x8≤ s( x
8 )
c( x8),
and so for 0 < t < 45,
0 < s(t)≤ π180
t ≤ s(t)c(t)
.
From the first two inequalities here we infer that s(t)→ 0 (t → 0+) and hence
c(t) = 1−2s( t
2
)2→ 1 (t → 0+).
Asπ
180c(t)≤ s(t)
t≤ π
180,
the result follows.
For 0 < x < 360 the derivatives c′(x) and s′(x) exist and are given by
c′(x) =− π180
s(x), s′(x) =π
180c(x).

246 Trigonometric functions in calculus Ch. 12
Proof . Suppose that 0< x< 360, and h> 0 is so small that x+h < 360, x−h> 0.Then
c(x+h)− c(x)h
=c(x)c(h)− s(x)s(h)− c(x)
h= c(x)
c(h)−1h
− s(x)s(h)
h.
But c(h)−1h =− 2s( h
2 )2
h → 0 (h → 0+) and so
c(x+h)− c(x)h
→− π180
s(x) (h → 0+).
Also
c(x) = c(x−h+h) = c(x−h)c(h)+ s(x−h)s(h),
s(x) = s(x−h+h) = c(x−h)s(h)+ s(x−h)c(h).
As c(h)2 + s(h)2 = 1 we can solve these equations by Cramer’s rule to obtain
c(x−h) = c(x)c(h)+ s(x)s(h), s(x−h) = s(x)c(h)− c(x)s(h).
From the first of these, by a similar argument to that above, it follows that
c(x−h)− c(x)−h
→− π180
s(x) (h → 0+).
These results combined show that c′(x) =− π180s(x).
The other result is proved similarly.
12.4 PARAMETRIC EQUATIONS FOR ACIRCLE
12.4.1 Area of a disk
The disk D(O;k)= {Z : |O,Z| ≤ k} has area πk2.Proof .We use a well-known expression for area as the value of a line integral; see e.g.
Apostol [1, Volume II, page 383].If γ is the path with equation x= kc(t), y= ks(t) (0≤ t ≤ 360), then γ traverses the
circle C (O,k) once. Moreover if O ≡ (0,0), P ≡ (kc(t),ks(t)) , T ≡ (kc′(t),ks′(t)) =(−πks(t)
180 , πkc(t)180
), we have that
δF (O,P,T ) =π
360k2[c2(t)+ s2(t)] =
π360
k2 > 0.
Now C (O;k) is the boundary of D(O;k) and so the area of D(O;k) is given by
12
∫γ
xdy− ydx = 12
∫ 360
0k2[c(t)s′(t)− s(t)c′(t)]dt
= 12
∫ 360
0
π180
k2 dt = πk2.

Sec. 12.4 Parametric equations for a circle 247
12.4.2 Length of an arc of a circle
For P ∈ C (O;k) let α be an angle in A ∗(F ) with support |QOP. Let |α |◦ = θ and γbe the curve with parametric equations x = kc(t), y = ks(t) (0 ≤ t ≤ θ). Then γ hasthe end-points Q and P and has length π
180 θk.Proof . The length of γ is given by
∫ θ
0
√[kc′(t)]2 +[ks′(t)]2 dt =
π180
θk.
NOTE. In the foregoing result, when θ = 360, γ is the circle C (O;k) and haslength 2πk. When θ = 180, γ is a semi-circle and has length πk. For other cases, wenote that the line QP has equation
s(θ)(x− k)− [c(θ)−1]y = 0.
The left-hand side in this has the value −ks(θ) when x = y = 0, and when x =kc(t), y = ks(t) the value
k{s(θ)[c(t)−1]− [c(θ)−1]s(t)} = k[−2s(θ)s2(12 t)+2s2(1
2 θ)s(t)]= 4ks(1
2 θ)s(12 t)[s(1
2 θ)c(12 t)− s(1
2 t)c(12 θ)
]= 4ks(1
2 θ)s(12 t)s(1
2 θ − 12 t)
> 0, for 0 < t < θ .
When θ < 180, we have −s(θ)< 0 so that Z ≡ (kc(t),ks(t)) is in the closed half-plane H6 with edge QP which does not contain O. Thus, recalling 7.5, γ is the minorarc with end-points Q and P.
When 180 < θ < 360, −s(θ) > 0 so Z is in the closed half-plane H5 with edgeQP which contains O. Thus γ is the major arc with end-points Q and P.
12.4.3 Radian measure
Definition . If, for any angle α , x = |α |◦ then π180 x is called the radian measure of
α , and denoted by |α |r. We also define, for 0 ≤ x ≤ 2π ,
C(x) = c
(180π
x
), S(x) = s
(180π
x
),
and then by the chain rule have
C′(x) =−S′(x), S′(x) =C(x),
for 0 < x < 2π .

248 Trigonometric functions in calculus Ch. 12
12.5 EXTENSION OF DOMAINS OFCOSINE AND SINE
12.5.1
NOTE. If we define E(x) by E(x) =C(x)+ ıS(x) (0 ≤ x ≤ 2π), where ı2 =−1, thenby 12.2.1(i)
E(x+ y) = E(x)E(y) (0 ≤ x ≤ 2π), (12.5.1)
and by 12.4.3E ′(x) = ıE(x) (0 < x < 2π).
It is natural to enquire if the definition of E can be extended from [0,2π] in such away as to preserve its basic properties.
From (12.5.1) we note that in particular
E(x+π) =−E(x) (0 ≤ x ≤ π),
as E(π) = −1, and if we specify that this is to hold for all x ∈ R then the domain ofdefinition of E becomes extended to R.
It follows that E(x+2π) = E(x) for all x ∈ R and so for all n ∈ Z, E(x+2nπ) =E(x). By the chain rule, for 0 < x < 2π ,
E ′(x+2nπ) = E ′(x) = ıE(x) = ıE(x+2nπ).
Thus for each n ∈Z, E ′(x) exists and satisfies E ′(x) = ıE(x) for 2nπ < x < (2n+2)π .Moreover for 0 < h < 2π ,
E(2nπ +h)−E(2nπ)h
=E(h)−1
h=
C(h)−1h
+ ıS(h)
h→ ı (h → 0),
while for −2π < h < 0,
E(2nπ +h)−E(2nπ)h
=E(2π +h)−1
h=
−E(π +h)−1h
=−E(π +h)−E(π)h
→−E ′(π) (h → 0)
= ı.
Thus E ′(2nπ) exists for each n ∈ Z and as its value there is ı = ıE(2nπ), we see thatE ′(x) = ıE(x) for all x ∈ R.
We note that |E(x)|=√
C(x)2 +S(x)2 = 1 for 0≤ x≤ 2π and then as E has period2π , |E(x)| = 1 for all x. Hence E(x) �= 0 for all x ∈ R.
Then for any fixed y ∈ R,
ddx
E(x+ y)E(x)
=E(x)ıE(x+ y)−E(x+ y)ıE(x)
E(x)2 = 0,

Sec. 12.5 Extension of domains of cosine and sine 249
so for some complex constant c,
E(x+ y) = cE(x), for all x ∈ R.
On putting x = 0 we see that c = E(y) and so E(x+ y) = E(x)E(y) for all x,y ∈ R.
From E ′(x) = ıE(x) ∀ x∈R, we deduce that C′(x) =−S(x), S′(x) =C(x), ∀ x∈R.From these the usual Maclaurin series for C(x) and S(x) (or E(x)) can be derived andtables of approximations to them prepared; see e.g. Apostol [1, Volume I, pages 435–436]. By introducing arctan x, π could be expressed as the sum of infinite series andthese used to prepare approximations efficiently; see e.g. Apostol [1, Volume I, pages253–255, 284–285].
12.5.2
Given a frame of reference F , let Q ≡ (1,0) and consider the points Z of the unitcircle C (O;1) and the angles θ = ∠F QOZ in A (F ). If s = |θ |r then Z ∼ cis θ =C(s)+ ıS(s). Any number t ∈ R such that
C(t)+ ıS(t) =C(s)+ ıS(s)
is called a radian measure of θ ; collectively we shall call them the multiple radianmeasures of θ . They have the form t = s+2nπı where n ∈ Z. We write t ∼∠F QOZ.
Suppose now that t1 ∼ ∠F QOZ1 = θ1 and t2 ∼ ∠F QOZ2 = θ2. Then
E(t1) =C(t1)+ ıS(t1) = cosθ1 + ısinθ1,
E(t2) =C(t2)+ ıS(t2) = cosθ2 + ısinθ2,
and from this by multiplication we have that
E(t1 + t2) = E(t1)E(t2) = cos(θ1 +θ2)+ ısin(θ1 +θ2).
Thus t1 + t2 ∼ ∠F QOZ1 +∠F QOZ2 and so addition of multiple measures corre-sponds to addition of angles.
Given any t ∈ R, then γ(u) = E(ut) (0 ≤ u ≤ 1) gives a curve on the unit circle,with initial point Q and terminal point Z. If t �∈ [−2π,2π], γ winds around the originand the curves generated in this way give us some pictorial feel for these multipleradian measures of angles.

This page intentionally left blank

List of axioms
AXIOM A1. Each line is a proper non-empty subset of Π. For each set {A,B} oftwo distinct points in Π, there is a unique line in Λ to which A and B both belong.
AXIOM A2. Each natural order ≤l has the properties:-
(i) A ≤l A for all points A ∈ l;
(ii) if A ≤l B and B ≤l C then A ≤l C;
(iii) if A ≤l B and B ≤l A, then A = B;
(iv) for any points A,B ∈ l, either A ≤l B or B ≤l A.
AXIOM A3. Open half-planes G1,G2 with common edge l have the properties:-
(i) Π\ l = G1 ∪G2;
(ii) G1 and G2 are both convex sets;
(iii) if P ∈ G1 and Q ∈ G2, then [P,Q]∩ l �= /0.
AXIOM A4. Distance has the following properties:-
(i) |A,B| ≥ 0 for all A,B ∈ Π;
(ii) |A,B|= |B,A| for all A,B ∈ Π;
(iii) if Q ∈ [P,R], then |P,Q|+ |Q,R|= |P,R|;(iv) given any k ≥ 0 in R, any line l ∈ Λ, any point A ∈ l and either natural order
≤l on l, there is a unique point B ∈ l such that A ≤l B and |A,B| = k, and aunique point C ∈ l such that C ≤l A and |A,C|= k.
AXIOM A5. Degree-measure | |◦ of angles has the following properties:-
(i) In all cases |α |◦ ≥ 0;
(ii) if α is a straight-angle, then |α |◦ = 180;

252 List of axioms
(iii) if ∠BAC is a wedge-angle and the point D �= A lies in the interior regionI R(|BAC), then
|∠BAD|◦+ |∠DAC|◦ = |∠BAC|◦,
while if |BAC is a straight angle-support and D �∈ AB, then
|∠BAD|◦+ |∠DAC|◦ = 180;
(iv) if B �= A, if H1 is a closed half-plane with edge AB, and if the half-lines [A,Cand [A,D in H1 are such that |∠BAC|◦ = |∠BAD|◦, then [A,D = [A,C ;
(v) if B �= A, if H1 is a closed half-plane with edge AB, and if 0 < k < 180, thenthere is a half-line [A,C in H1 such that |∠BAC|◦ = k.
AXIOM A6. If triangles T and T ′, with vertices {A,B,C} and {A′,B′,C′}, respec-tively, are such that
|C,A|= |C′,A′|, |A,B|= |A′,B′|, |∠BAC|◦ = |∠B′A′C′|◦,
then T(A,B,C)
≡→(A′,B′C′) T ′.
AXIOM A7. Given any line l ∈ Λ and any point P �∈ l, there is at most one line msuch that P ∈ m and l ‖ m.

Bibliography
[1] T.M. Apostol. Calculus, volume I and II. Blaisdell, second edition, 1967.
[2] J.K. Baumgart et al., editors. Historical Topics for the Mathematics Classroom.National Council of Teachers of Mathematics, second edition, 1989.
[3] F. Cajori. A History of Elementary Mathematics. Macmillan, 1896.
[4] H.S.M. Coxeter. Introduction to Geometry. Wiley, third edition, 1969.
[5] H.S.M. Coxeter and S.L. Greitzer. Geometry Revisited. Mathematical Associa-tion of America, 1967.
[6] G.H. Forder. The Foundations of Euclidean Geometry. Cambridge, Dover,1931, 1958.
[7] G.H. Forder. Higher Course Geometry. Cambridge, second edition, 1949.
[8] L. Hahn. Complex Numbers and Geometry. Mathematical Association of Amer-ica, 1994.
[9] R.A. Johnson. Advanced Euclidean Geometry (Modern Geometry). HoughtonMifflin, Dover, 1929, 1960.
[10] W. Ledermann and S. Vajda. Handbook of Applicable Mathematics: Combina-torics and Geometry, volume V, part A. Wiley, 1985.
[11] C.M. McGregor, J.J.C. Nimmo, and W.W. Stothers. Fundamentals of UniversityMathematics. Horwood Publishing (begun as Albion Publishing, renamed),Chichester, West Sussex, 1994.
[12] G.C. Smith. Introductory Mathematics: Algebra and Analysis. Springer, 1998.
[13] R.E. Wheeler and E.R. Wheeler. Modern Mathematics for Elementary SchoolTeachers. Brooks/Cole, ninth edition, 1995.

Index
Z3Z4Z1Z2
, 116
(O,Z1)+(O,Z2), 188(O,Z1).(O,Z2), 190(Z1,Z2) ↑ (Z3,Z4), 185−αd , 1750F , 1350dF , 170180F , 135360F , 13590dF , 170AB, 21C(x), 247S(x), 247T
(A,B,C)≡→(A′,B′,C′) T ′, 49
Z = pZ1 +qZ2 + rZ3, p+q+ r = 1, 194Z ≡F (x,y), 82Z ∼F z, 145[A,B , 25[A,B,C,D], 32[A,B,C], 31[A,B], 23Δ[A,B,C,D], 75Δ[A,B,C], 73Λ, 21Π, 21α +β , 136α ⊕β , 135αd +βd , 171αd , 169∠BAC, 30∠F IOP, 136|α |◦d , 169|α |◦, 40|α |r, 247|BAC, 29
βd −αd , 175cis θ , 149cosα , 130cosαd , 169co− sp α , 129cotγ , 165δF (Z1,Z2,Z3), 94|A,B|, 3512n α , 240Z3Z4F
Z1Z2F, 148
γ −α , 138≤l , 22A (F ), 136A ∗(F ), 134DA (F ), 170D1, 168I R(|BAC), 29V (Π;O), 188�F Z1Z0Z2, 153ml(|BAC), 46μ(x), 243Z1Z2≤l
, 114Z1Z2F , 148Z3Z4 Z1Z2, 116π , 245πl , 57ρ(l,A,≤l), 25sinα , 130sinαd , 169tanα , 149tanαd , 16912 α , 139θF , 162b−a, 191−→OZ, 192
Index 255
−→OZ
⊥, 207
c(x), 241f (F ), 127i(α), 130l ≡F ax+by+ c = 0, 87l ‖ m, 54l ⊥ m, 44nα , 138rα;Z0 , 150s(x), 241sα;Z0 , 153sl , 58t ∼ ∠F QOZ, 249t.(O,Z1), 188tZ1,Z2 , 121xF , 135C (O;k), 103E R(|BAC), 30
�F (OZ4,OZ5), 175
adjacent sidesconvex quadrilateral, 32
adjacent verticesconvex quadrilateral, 32
alternate angles, 54angle
arms, 30co-supported, 129degree-measure, 40duo, 169full, 30half, 139indicator, 130multiple radian measures, 249multiples, 138null, 30radian measure, 247reflex , 30right, 44sensed, 153straight, 30vertex, 30verticall opposite, 41
wedge, 30angle- support
arms, 29angle-support, 29
mid-line, 46straight, 29vertex, 29
anglesalternate, 54corresponding, 62difference, 138modified sum, 136subtraction, 138sum, 135supplementary, 41
areaconvex quadrilateral, 75polygonal region, 78triangle, 73
areal coordinatespoints, 193
armsangle, 30angle-support, 29
ASA principle, 52axes
reference, 81axial symmetry, 58
bisectors, 168
Cartesian complex coordinate, 145Cartesian coordinates, 82Cartesian equation
line, 87centre
circle, 103centroid, 203Ceva’s theorem, 196chord
circle, 105circle, 103
centre, 103chord, 105

256 Index
diameter, 105exterior point, 103interior point, 103major arc, 114minor arc, 114nine-point, 225non-secant line, 105radius, 103secant, 105tangent, 105
circumcentre, 207circumcircle, 207closed half-planes, 27co-supported angle, 129coaxal, 119collinear, 22common edge, 26complex ratio, 148complex-valued distance, 148concurrent, 22congruent
triangles, 49contact point
tangent, 105convex
polygon, 76convex polygon
interior, 76convex quadrilateral, 32
adjacent sides, 32adjacent vertices, 32area, 75diagonal, 32diagonal line, 32opposite sides, 32opposite vertices, 32perimeter, 32side, 32side-line, 32vertex, 32
convex set, 26coordinate
Cartesian complex, 145coordinates
Cartesian, 82mobile, 208polar, 133
corresponding angles, 62cosine rule, 141cross, 175Cross-bar theorem, 40cross-ratio, 166cyclic quadrilateral, 114
degree-measureangle, 40reflex angle, 46
DeMoivre’s theorem, 182Desargues’ perspective theorem, 199diagonal
convex quadrilateral, 32diagonal line
convex quadrilateral, 32diameter
circle, 105difference
vectors, 191difference of angles, 138direct correspondence
natural orders, 90disk, 246distance, 35
complex-valued, 148sensed, 114
dot productvectors, 190
drop perpendicular, 57duo-angle, 169
indicator, 169null, 169right, 169sensed, 175
duo-angles;sum, 171duo-sector, 168
edgecommon, 26
equilateral triangle, 219

Index 257
equipollentpoint pairs, 185
erectedperpendicular, 44
Euclidean geometry, 61Euler line, 215exterior point
circle, 103exterior region, 30external bisector, 71
Feuerbach’s theorem, 229frame of reference, 81frame reference
orientation, 160full-angle, 30
geometryEuclidean, 61
Grassmann supplement, 207
half-angle, 139half-line, 25half-lines
opposite, 25half-plane
closed, 27open, 26
harmonic mean, 99harmonic range, 71hypotenuse, 70
incentre, 206incircle, 206indicator
angle, 130duo-angle, 169
indirect correspondencenatural orders, 90
inequalitytriangle, 55
initial point, 25interior
convex polygon, 76interior point
circle, 103interior region, 29inverse
vector, 191isogonal conjugates, 234isometry, 123isosceles triangle, 51
length, 35length of radius, 103line, 21
Cartesian equation, 87different sides of, 27one side of, 27parametric equations, 92
linesperpendicular, 44
major arccircle, 114
meanharmonic, 99
Menelaus’theorem, 195mid-line
angle-support, 46mid-point, 38minor arc
circle, 114Miquel’s theorem, 232mobile coordinates, 208modified sum
angles, 136mp(A,B), 38multiple radian measures, 249multiples
angle, 138
Napoleon’s theorem, 219natural order, 22natural orders
direct correspondence, 90naturalorders
indirect correspondence, 90nine-point circle, 225non-secant line

258 Index
circle, 105norm
vector, 190null duo-angle, 169null vector, 191null-angle, 30
open half-plane, 26opposite
vertex and side in triangle, 31half-lines, 25
opposite sidesconvex quadrilateral, 32
opposite verticesconvex quadrilateral, 32
ordernatural, 22reciprocal, 23
orientationframe reference, 160point triple, 160
origin, 81orthocentre, 204
Pappus’ theorem, 201parallel, 54parallelogram, 63parameter
point on line, 92parametric equations
line, 92Pascal’s theorem, 177perimeter
convex quadrilateral, 32triangle, 31
perpendiculardrop, 57
perpendicular erected, 44perpendicular lines, 44plane, 21point, 21
initial, 25point pairs
equipollent, 185
point tripleorientation, 160
pointsareal coordinates, 193
polar coordinates, 133polygon
convex, 76polygonal region
area, 78position vector, 192power, 118principle
ASA, 52SAS, 50SSS, 53
productsensed, 116
product by a scalarvector, 188
projection, 57Ptolemy’s theorem, 167Pythagoras’ theorem, 69
quadrants, 81quadrilateral
convex, 32cyclic, 114
radian measureangle, 247
radical axis, 118radius
circle, 103range
harmonic, 71ratio
complex, 148sensed, 116
reciprocal order, 23rectangle, 63reference
axes, 81frame, 81
reflex angle

Index 259
degree-measure, 46reflex-angle, 30region
exterior, 30interior, 29
right duo-angle, 169right-angle, 44rotation, 150rule
cosine, 141sine, 141
SAS principle, 50scalar product
vectors, 190secant
circle, 105segment, 23sensed distance, 114sensed duo-angle, 175sensed product, 116sensed ratio, 116sensed-angle, 153sensed-area
triangle, 156set
convex, 26side
convex quadrilateral, 32triangle, 31
side- lineconvex quadrilateral, 32
side-linetriangle, 31
similar triangles, 68sine rule, 141slope, 149space
vector, 188square, 78SSS principle, 53standard position;angles, 134standard position;duo-angles, 170Steiner-Lehmus theorem, 142
straight angle- support, 29straight-angle, 30subtraction
vectors, 191subtraction of angles, 138sum
angles, 135vectors, 188
sum of duo-angles, 171supplementary angles, 41support
angle, 30symmedian point, 235symmedians, 235
tangentcircle, 105contact point, 105
theoremCeva’s, 196Cross-bar, 40DeMoivre’s, 182Desargues’ perspective, 199Feuerbach’s, 229Menelaus’, 195Miquel’s, 232Napoleon’s, 219Pappus’, 201Pascal’s, 177Ptolemy’s, 167Pythagoras’, 69Steiner-Lehmus, 142
translation, 121triangle, 31
area, 73equilateral, 219isosceles, 51sensed-area, 156side, 31side-line, 31
triangle inequality, 55triangles
congruent, 49similar, 68

260 Index
vectorinverse, 191norm, 190null, 191position, 192product by a scalar, 188
vector space, 188vectors
difference, 191dot product, 190scalar product, 190subtraction, 191sum, 188
vertexangle, 30angle- support, 29convex quadrilateral, 32
vertex and side in triangleopposite, 31
vertex of triangle, 31verticall opposite
angle, 41
Wallace-Simson line, 230wedge-angle, 30
