george tillinghast, rebecca stein, mike suriani tom dinetta, jon richardson
TRANSCRIPT

George Tillinghast, Rebecca Stein, Mike Suriani
Tom Dinetta, Jon Richardson

BattleBots- The Legacy
• BattleBots IQ competition April 2007• Integrate engineering knowledge and
creativity• Contact: Nola Garcia
– BattleBots IQ Program Director

Design Problem:
• To create a battling robot that is both highly maneuverable and formidable in combat.
• Bot can withstand damage and immobilize opponent

Design Requirements:
• Must meet all safety requirements • Must weigh between 60lbs and 120lbs• Must be mobile and remotely controlled• Must protect itself• Must be capable of inflicting damage

Design Wants:
• Invertible
• Tank drive
• Low center of gravity
• Multiple weapons
• Electric motors

Possible Solutions:

Solution Research: Weapon
Wedge Hammer Saw
Spinner Rammer

Solution Research: Drive Element
• Tank drive-Maximum mobility, ultimate simplicity
-Utilizes two separate motors for turning
• Walking -Consume large amounts of power
-Easy to Damage

Solution Research: Electronics
• Motors-Voltage, power, weight, price
• Speed Controllers-Range of speeds, tolerance, durability-Popular brands: IFI Robotics, Vantec, 4DQ
• Radio Controllers-One link for each: motor, weapon, on-off switch

Preliminary Design
+ =
Inverted Wedge Flipping Robot:
-Armor
-Flipping Arm
-Drive Train
-Electronics

Design: Armor
• Materials– Titanium Alloy (Exterior)
• Withstand largest load, smallest weight• Difficult to machine
– Aluminum (Interior) • Protected by Titanium• Lightweight, easy to machine
• Design– Invertible Parallelogram– Ultimate Defense

Design: Lifting Arm• Purpose
– Dynamic offensive weapon– Lift and toss an enemy
• Design– Moves in arc motion– Flush with body
• Advantages– High offensive damage – “Unlimited” firing cycles

Lifting Arm – Power• Linear Actuators
– Background• Small power screw• Limited only by battery
– Requirements• High load capacity• Reasonable speed
– Cost• Around $100

Lifting Arm - Considerations
• Engineering analysis– Dynamic analysis
• Define motion of arm• Identify necessary
dimensions
– Stress analysis • Identify points of high
stress• Choose appropriate
material

Design: Drive Train
• Tank drive– Maximum mobility – Achieve 4 wheel drive
• Bi-axial support– Wheel protection– Additional support
• Invertible

Drive Train - Components• Motors
– Range in power• 3hp to 9hp• 2000rpm to 5000rpm
– Requires speed reduction• Chain and sprocket
– High efficiency– Low cost– Easy to configure
• Minimal precision required

Design: Electronics• Wireless communication between Operator and Bot• Converts user commands into motor operations• Senses Bot hardware failure• Controls the Bot’s Primary weaponry

Electronics: System Overview
3
32
5
1
4

Electronics: Central Control Unit
• Microchip PIC18F8520• Code written in C or
assembly language• Dual control unit:
– Basic Hardware Functionality
– Specialized Hardware Functionality
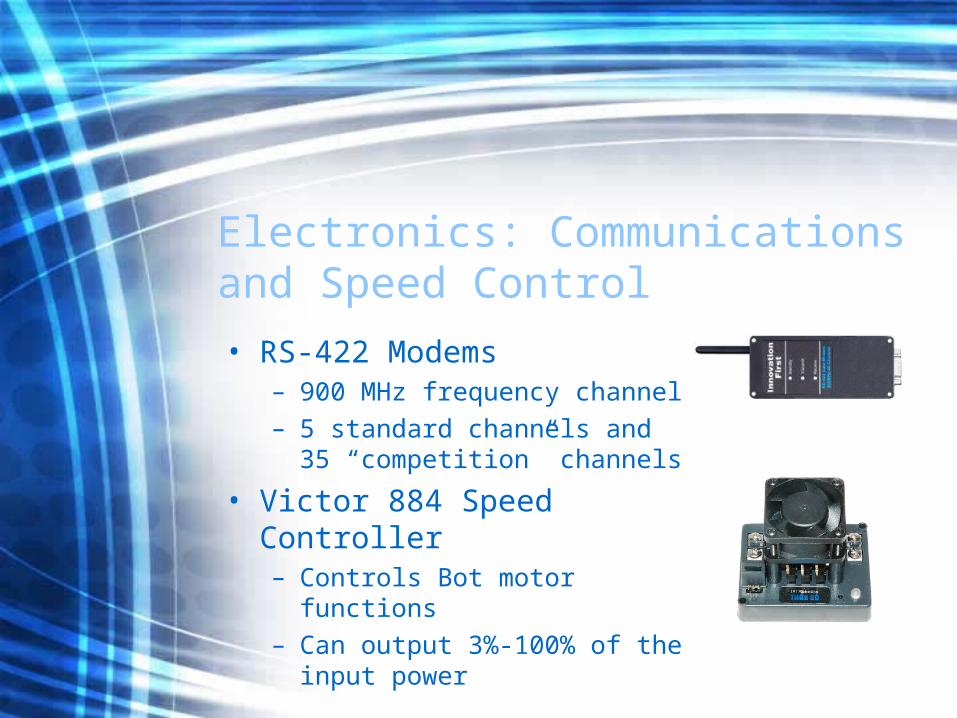
Electronics: Communications and Speed Control
• RS-422 Modems– 900 MHz frequency channel– 5 standard channels and 35
“competition” channels
• Victor 884 Speed Controller– Controls Bot motor functions– Can output 3%-100% of the
input power

Design Schedule and
Cost Analysis

Design Schedule

Cost Analysis
Shell/Body $1,669.00
Lifting Arm $459.00
Drive Train $1,283.00
Electronics $729.24
Total $4,140.00

Conclusion
• Design approach will yield a competitive robot
-Impenetrable titanium shell
-Deadly lifting arm
-Invertible wedge defense
-Maneuverability and accuracy