gps basic concepts 2
TRANSCRIPT

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 1/17
Global Positioning System
GPS - Positioning Concepts And Errors And Accuracy of GPS Observation
System Description:
The Global Positioning System (GPS) consists of a constellation of radio-navigationsatellites, a ground control segment that manages satellite operation and users with specialized
receivers who use the satellite data to satisfy a broad range of positioning reuirement! Thesystem was established by the "nited States #epartment of #efense (#o#) to fulfill defense- positioning needs and as a by-product, to serve the civilian community!
The satellite constellation, consist of $% satellite and three active spares positioned $&,&&&'m (about three times the earths radius) above the earth! The satellites are distributed in amanner that ensures at least four satellites are visible almost anywhere in the world at any time!ach satellite receives and stores information from the control segment, maintains very accuratetime through onboard precise atomic cloc's and transmits signals to the earth!
The ground control segment operates the satellite system on an on-going basis! *t
consists of five trac'ing stations distributed around the earth of which one, located in +oloradoSprings, is a aster +ontrol Station! The control segment trac's all satellites, ensures they areoperating properly and computes their position in space!
*f a satellite is not operating properly the ground control segment may set the satelliteunhealthy and apply measures to correct the problem! *n such cases, the satellite should not beused for positioning until its status is returned to healthy! The computed positions of thesatellites are used to derive parameters, which in turn are used to predict where the satellites will be later in time! These parameters are uploaded from the control segment to the satellites and arereferred to as broadcast ephemerides!
The user segment includes all those who use GPS trac'ing euipment to receive GPSsignals to satisfy specific positioning reuirements! . wide range of euipment designed toreceive GPS signals is available commercially, to fulfill an even wider range of user applications!.lmost all GPS trac'ing euipment have the same basic components/ an antenna, an 01 (radiofreuency) section, a microprocessor, a control and display unit (+#"), a recording device, and a power supply! These components may be individual units, integrated as one unit, or partiallyintegrated! "sually all components, with the e2ception of the antenna, are grouped together andreferred to as a receiver! Some GPS receivers being mar'eted now in fact only consist of computer cards, which may be mounted in portable computers or integrated with other navigation systems!
GPS Signals:
ach GPS satellite continuously transmits signals, which contain a wealth of information!#epending on the type and accuracy of positioning being carried out, a user may only beinterested in a portion of the information included in the GPS signals! Similarly, a given GPSreceiver may only enable use of a portion of the available information! *t is therefore importantfor users to understand the content and use of GPS signals! The information contained in GPSsignals includes the carrier freuencies, +oarse .cuisition (+3.) and Precise (P) codes and thesatellite message! #escriptions of each of these signal components are as follows!
4-%

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 2/17
Global Positioning System
Carrier Measurements
Signals from GPS satellites are continuously transmitted on two carrier freuencies,%565,4$ 7z and %$$6!8& 7z, and are referred to as 9% and 9$ respectively! Since radiowaves propagate through space at the speed of light, the wavelengths of the GPS carrier signals
are computed as
λ : c3f -------- ($!%)
where λ is the wavelength (i!e! the length of one cycle) in metres, c is the speed of light
(appro2imately ; 2 %& m3s) and f is the carrier freuency in 7z (i!e! cycles per second)! .snapshot of one section of carrier transmission illustrates the definition of wavelength and cycles!
The freuency and wavelength of the 9% and 9$ carriers (computed using euation ($!%)are given in Table $!%!
GPS receivers, which record carrier phase, measure the fraction of one wavelength (i!e!
fraction of %< cm for the 9% carrier) when the receiver first loc's onto a satellite andcontinuously measure the carrier phase from that time! The number of cycles between thesatellite and receiver at initial start up (referred to as the ambiguity) and the measured carrier phase together represent the satellite receiver range (i!e! the distance between a satellite and areceiver)! *n other words,
0ange : measured carrier phase = (.mbiguity 2 wavelength) = errors
or Φ : p = > λ = errors ------ ($!$)
where Φ is the measured carrier phase in metres, p is the satellite-receiver range in metres, > is
the ambiguity (i!e! number of cycles) and λ is the carrier wavelength in metres!
able !"# Carrier $re%uencies and &avelengt'sCarrier $re%uency (f) &avelengt' ( )
9% %565!4$ 7z %< cm
9$ %$$8!8& 7z $4 cm
+ode and satellite messages are piggy-bac'ed on the carrier signal through modulation!The 9% carrier is modulated by a coarse acuisition code referred to as the +3. code, a precisecode referred to as the P code and the satellite message! The 9$ carrier is modulated by the Pcode and the satellite message!
$igure -- *nformation Modulated on Eac' Carrier
Code Measurements:
4-$
9% +arrier 9$ +arrier
+3. +odeP +odeessage
P +odeessage

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 3/17
Global Positioning System
*t is the code measurements (also referred to as pseudorange measurements) that enableinstaneous position determinations using GPS satellites! The code is composed of a series of chips, which have values of % or &! The +3. code has a freuency of %!&$; 7z (i!e! %!&$;million chips per second) and the P code has a freuency of %&!$; 7z!
The chip lengths of $<; m and $<!; m for the +3. code and P code respectively were
computed using euation ($!%), letting λ be the chip length! .lthough the P code is generally tentimes more accurate than the +3. code, it is unavailable for civilian use in %<<; when the fullGPS constellation is complete (c>eff, %<<%), meaning only +3. code is worthy of consideration for civilian GPS applications!
+ode measurements are the difference in time between when the code is transmitted froma satellite and received at a GPS receiver, multiplied by the speed of light! That is,
measured code : speed of light 2 (reception time - transmission time)
or P : c (tr - tt)! (in metres) ($!;)
where P is the measured code, c is the speed of light, t r is the signal reception time and t t is thesignal transmission time! The code measurement is actually a direct measurement of satellite:receiver range(p), i!e! /
easured code : range = error
or P : p = errors (in metres) ($!4)
Comparison of Code and Carrier Measurements:
.t this point it is possible to ma'e some brief comparisons of code and carrier
measurements! +arrier wavelengths (%< cm for 9%) are much shorter than the +3. code chiplength ($<; m) and conseuently can be measured more accurately and used to achieve muchhigher positional accuracies than code measurements! *ndeed the best relative accuraciesachieved using code measurements are usually a few metres, and using carrier measurement areusually a few centimeters!
The problem with using carrier observations instead of code observations is evident uponcomparison of euations ($!$) and ($!4)! ?ith code observations a direct measure of the satellite: receiver range is attained! ?ith carrier observations, the ambiguity term (number of wholecycles) must be estimated before one may ta'e advantage of the carrier accuracy! .mbiguityestimation leads to comple2ities in the use of carrier phase observations, which do not e2ist withcode observations!
Satellite Message:
The satellite messages, which is modulated on both 9% and 9$ freuencies, containsamong other information, satellite broadcast ephemerides and health status! The ephemediredinclude the parameters necessary to compute a satellites position in space for a given time andthe health status indicates if a satellite is healthy! .lmost all receivers use the broadcast
4-;

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 4/17
Global Positioning System
ephemerides in con@unction with code observations, carrier observations or both to solve for aGPS receivers position in space!
ypes of GPS Positioning:
"p to this point, the three segments of GPS have been described and the components of
signals broadcasted by the satellites have been e2plained! a@or types of possible positioningmethods are as follows!
- Single Point Positioning%! Static mode$! Ainematic mode
- 0elative Point Positioning%! Static mode$! Ainematic mode
- 0eal-time data collection
- Post mission processing
Selective Availability and Anti-Spoofing:
Two terms often associated with GPS status are selective availability (S.) and anti-spoofing (.S)! Both refer to techniues to limit the accuracies achievable for civilian users!Selective availability consists of the degradation of the broadcast orbit (i!e! the accuracy of thesatellites 'nown position in space) and dithering of the satellite cloc's! S. is currently beingimplemented! .s a result of S., single point positioning accuracies are limited to %&& mhorizontally and %58 m vertically at the positioning accuracies are limited to %&& m horizontally
and %58 m vertically at the <5C confidence level ("!S! #o# and #oT, %<D8), instead of the $&-;& m and ;&-45 m possible without S. (+annon, %<<%)!.nti-spoofing is the denial of access of the P code to civilian users (e2cept those with
special authorization from the "!S! #o#)! *mplementation of .S is planned to begin when thefull GPS constellation is available at the end of %<<; (c>eff, %<<%), although intermittenttesting of .S commenced in .ugust %<<$! ?hen .S is activated, to deny access, the P code isreplaced with a E code on the 9% and 9$ carriers! This E code has similar properties to the Pcode, but is un'nown to unauthorized users!
4-4

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 5/17
Global Positioning System
"Errors and Accuracy of GPS observation"
+o, Accurate *s A GPS Position
Before tal'ing about rrors and accuracy of GPS, we should 'now what .++"0.+E andP0+*S*F> mean
The terms Accuracy and Precision are worthy of clarification! .ccuracy refers to how close anestimate (or measurement) is to the true but un'nown value, while precision refers to how closean estimate is to the mean estimate! This can also be understood from the following figure/
7ow accurate GPS position is *s it accurate enough to find a +ity 7ow about a house +ouldto measure the size of a manhole 7ow about a uarterThe simple answer is yes H to all of the above uestions!GPS positions vary in accuracy from %&s of meterIs, to cms depending on what 'ind of GPS
receivers, and how to use them!The truth is that not everybody needs the highest accuracy of the GPS! Just as there are manydifferent uses for GPS, each use needs a different accuracy! ach level of accuracy has someGood >ews and some Bad >ews!
Accuracy levels:
To start, lets tal' a little bit about accuracy! The latitude and longitude, or the Khorizontalcoordinates are referred to as $# coordinates! *f we include the GPS height our position can now be called a ;# coordinate! The horizontal coordinates from GPS are more accurate than theheights! ?hy ?ell, the satellites used to calculate position are spread throughout the s'y, butnone are visible below us! *n general, the heights we get from GPS are about %!8 times less
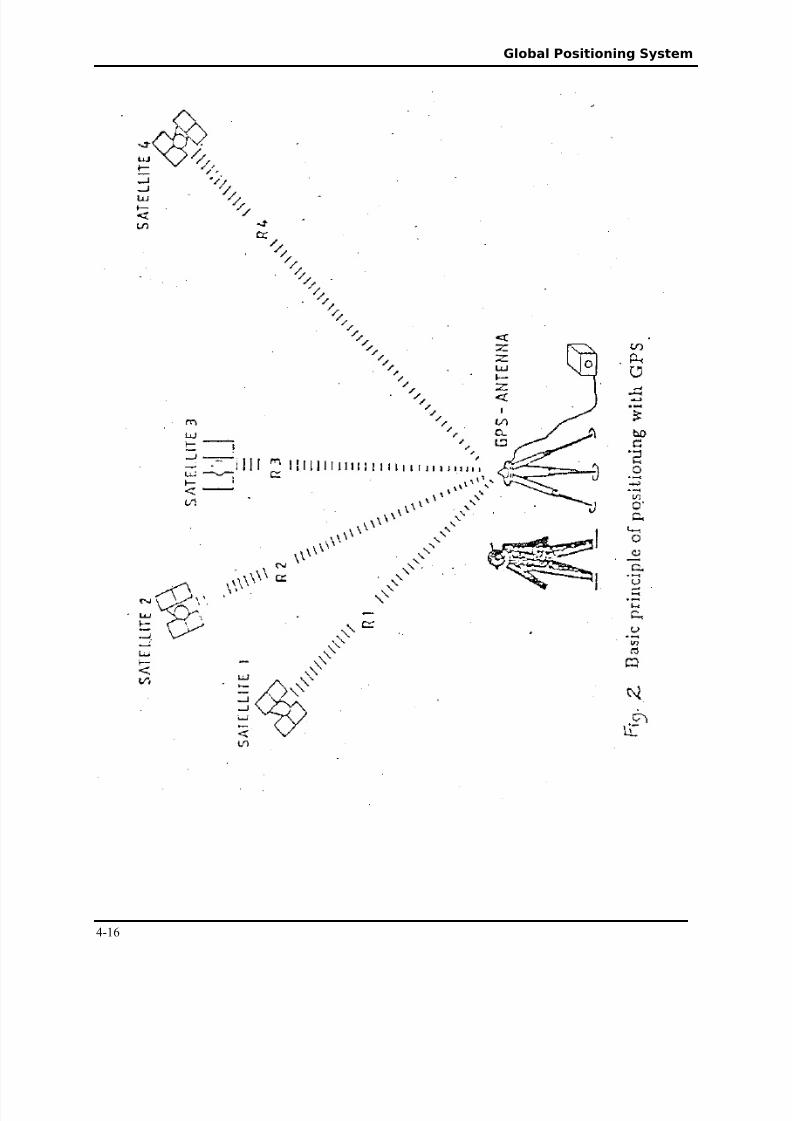
accurate than the latitude and longitude! >ow lets loo' at the ; basic accuracy levels!Single Point Positioning .ccuracy - %&metres ($#), %8-m (;#). single point GPS position has a typical accuracy of around %& metres or so! This position iscomputed from a single GPS receiver H errors and all! To review, the GPS receiver uses the radiosignals sent from the satellites to measure the distance (satellite ranging) to each of at least 4satellites!
4-5

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 6/17
Global Positioning System
Grap'ic of person standing in a #.m circle
"sing these ranges plus the location of each satellite ('nown from the information broadcastfrom each satellite) and some fancy mathematics, the receiver can figure out its location! 1or e2ample, if you loo' at the position computed by any small recreational GPS receiver, which can be held in the palm of your hand, youll read on the screen a single coordinate (or uniueaddress)! The position might be wrong by about %& m! This type of receiver is sold through mostsports stores!
The Good >ews/ This level of accuracy is very easy to get and the receiver is fairly ine2pensive!.s long as you are outside remember the GPS only wor's outside) and your view to the s'y isnot completely bloc'ed (large buildings are a good e2ample of things that bloc' out the s'y) youshould be able to get a single point position! This type of position is even possible if you are inthe woods!
The Bad >ews/ >ot much bad news here, e2cept the accuracy! But its plenty accurate enough tofind your way bac' to your campsite at the end of a hi'e!
#ifferential Positioning .ccuracy - &!5m to 5m ($#), &!Dm to Dm (;#)
Grap'ic of person standing in a #m circle
#ifferential GPS positioning accuracy varies from &!5 metre to 5 metres depending on several
'ey factors! #ifferential GPS, or #GPS as its often called, reuires the use of $ different GPSreceivers! Fne receiver, called the base or reference receiver, is placed at a point where the e2act position (the 9atitude and 9ongitude) is already 'nown very accurately! ! The second receiver,called the roving receiver (or rover), is placed over the points or features to be positioned! .teach point, the satellite data from at least 4 separate satellites is then stored in the receiver! .t thesame time, the base receiver trac's the same satellites at the same time! *t too stores or records
4-8

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 7/17
Global Positioning System
similar data! *n other words, both the base and rover receivers trac' the same satellites at thesame time and store similar data, but at $ different locations!9ater, the data from both receivers is transferred to a computer and special software is used toremove many of the errors in each of the positions! These Kdifferentially corrected positions areaccurate to somewhere between &!5m and 5 m! This level of accuracy is sometimes called
apping Luality because it is often the desired accuracy to locate features for a Geographic*nformation System (G*S) or for mapping purposes!The Good >ews/ The GPS receivers and software on the mar'et today are very powerful andfairly easy to use ma'ing this level of accuracy very easy to achieve H if you are careful! venhigher accuracy may be achieved using survey grade receivers H see ne2t section on +arrier Positioning!
Bad >ews/ This level of accuracy reuires either $ GPS receivers or one roving receiver and datafrom a second Kbase source! *n either case, this method is more e2pensive, not as simple to useand may reuire some practice or perhaps even some training to get the most of the system anduse the GPS hardware (the receiver) euipment and software properly!
+arrier Positioning .ccuracy M %cm - ;& cm ($#), %!8cm to 45cm (;#)
Grap'ic of a %uarter-si/ed ob0ect
This is the highest level of accuracy possible using the GPS and is the techniue that landsurveyors and engineers generally use! This method is often referred to as Survey grade GPS!The method is e2actly the same as #ifferential Positioning with a few notable e2ceptions!
Two receivers are usedN one receiver over a 'nown location (the base or reference receiver) andthe second (0over or roving receiver) is placed over the new or un'nown location! The receiverstrac' and record data from the same satellites at the same time recording similar information!The data is eventually transferred from the receivers to a computer! Specialized software is usedto Kcorrect the data!
The main differences are/GPS receiver type H a Ksurvey grade receiver must be used! These receivers are somewhat larger and usually much more e2pensive than those used for single point positioning!
Satellite visibility H an unobstructed, clear view of the s'y, no trees or branches can come between the receiver and the satellites!
The positions we get from this method are typically accurate to a cm or less!
4-6

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 8/17
Global Positioning System
Sources of *naccuracy: 'e Problems
*n our discussion of measuring distances using patterns of numbers, we assumed that you andyour friend started counting numbers simultaneously! *f your watch is one second off, this willtranslate into ;44 meters of error in measuring distance, because sound travels ;44 meters in onesecond! ?ith satellites, the electronic signals travel about ;&&,&&&,&&& meters per second (thespeed of light)! So the errors in the satellite cloc' and the receiver cloc' contribute profoundly toerrors in distance measurements!
Satellite Cloc1:
Fne billionth of a second (one nanosecond) of inaccuracy in a satellite cloc' results in about ;&
centimeters (one foot) of error in measuring the distance to that satellite! 1or this reason, thesatellites are euipped with very accurate (+esium) atomic cloc's! ven these very accuratecloc's accumulate an error of % billionth of a second every three hours! To resolve the satellitecloc' drifts, they are continuously monitored by ground stations and compared with the master control cloc' systems that are combinations of more than %& very accurate atomic cloc's! Theerrors and drifts of the satellites cloc' are calculated and included in the messages that aretransmitted by the satellites! *n computing the distance to the satellites, GPS receivers subtractthe satellite cloc' errors from the reported transmit time to come up with the true signal traveltime!ven with the best efforts of the control centers in monitoring the behavior of each satellitecloc', their errors cannot be precisely determined! .ny remaining satellite cloc' errors
accumulate typically to about a few nanoseconds, which cause a distance error of about one-meter!2eceiver Cloc1:
Similar to satellite cloc' errors, any error in the receiver cloc' causes inaccuracy in distancemeasurements! 7owever, it is not practical to euip receivers with very accurate atomic cloc's!.tomic cloc's weigh more than $& 'ilograms, cost about "SO5&,&&&, and reuires e2tensive carein temperature control!
4-D

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 9/17
Global Positioning System
.ssume that at a given time our receiver cloc' has an error of one millisecond, causing adistance error of about ;&&,&&& meters! *f the distances to all satellites are measured e2actly atthe same time, then they are all off by the same amount of ;&&,&&& meters! ?e can, therefore,include the receiver cloc' error as one of the un'nowns that we must solve for! >ow we have
four un'nowns/ three components of position and the new un'nown of receiver cloc' error! ?ewill need four euations in order to solve for the four un'nown! easuring distances to four satellites can provide us such four necessary euations! *nstead of three satellites before, now weneed four, but in return we can use ine2pensive cloc's in our GPS receivers!
>ote that the concept of receiver cloc' being one of the un'nowns is valid only if we ta'emeasurements to all satellites e2actly at the same time! *f distances to all satellites are notmeasured at the same time, then for each measurement we have a different cloc'!
a'ing simultaneous measurements to four satellites, we not only compute the three dimensionsof our position, but we also find the error in our receiver cloc' with very good accuracy! .
typical cloc' has a drift of about %&&& nanoseconds every second, but we can now ad@ust thereceiver time to the accuracy of the GPS cloc'! This will ma'e the ine2pensive cloc' of thereceiver as good as an atomic cloc'! 0eceivers correct their cloc' every second and provide acorrected tic signal for outside use for those who need accurate time! *f we put a receiver in a precisely 'nown location, then we need to trac' only one satellite to continuously calculate thereceiver cloc' error and ad@ust it!1our is the minimum number of satellites that we need to compute position and time! The moresatellites we have the more accurate results we can get! This is discussed later in the G#FPsection!
Satellite Orbit Error:
.s we discussed before, the accuracy of our computed position also depends on how accuratelywe 'now the location of the satellites (the points of references)! The orbits of satellites aremonitored continuously from several monitoring stations around the earth and their predictedorbital information is transmitted to the satellites, which they in turn transmit to the receivers!The history of GPS has shown, thus far, that the accuracy of the orbital prediction is in the order of a few meters! This will create about a few meters of error in computing our position!Atmosp'eric Errors: *onosp'ere and roposp'ere:
Ionosphere:
*n computing distances to satellites, we first measure the time it ta'es for the satellite signal toreach the receiver and then we multiply this by the speed of light! The problem is that the speedof light varies due to atmospheric conditions! The upper layer of the atmosphere, called theionosphere, contains charged particles that slow down the code and speed up the carrier!The magnitude of the effect of the ionosphere is much more during the day than during the night!The magnitude also has a cyclical period of %% years that reaches a ma2imum and a minimum!1or the current cycle, the ionosphere will reach its pea' magnitude in %<<D and its minimum in$&&4! The cycle will then be repeated! The effects of the ionosphere, if not mitigated, canintroduce measurement errors greater than %& meters!
4-<

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 10/17
Global Positioning System
Some receivers use a mathematical model for the effects of the ionosphere! ?ith the appro2imate'nowledge of the density of the charged particles in the ionosphere (broadcast by satellites), theeffect of the ionosphere can be reduced by about 5&C! The remaining error is still significant!The impact of the ionosphere on electronic signals depends on the freuency of the signal! Thehigher the freuency, the less is the impact! So if we transmit the patterns simultaneously via two
different freuencies, the ionosphere may delay the code on one freuency, for e2ample, by 5meters and on the other freuency, say, by 8 meters! ?e cannot measure the magnitude of thesedelays, but we can measure their difference by observing the difference on their arrival time,which in this case translates into % meter of effective distance between them! By measuring thisdifference and using 'nown formula for freuency dependency of the ionosphere delay,ionosphere effect can be removed!
*t is e2actly for this reason that all GPS satellites transmit information in two freuencies, called L1 and L2! Precision receivers trac' both signals to remove the effect of the ionosphere! .ll non- precision receivers trac' only the 9% signal! This is one of the main distinguishing features between different types of receivers! The 9% receivers are also called single freuency receivers,
while the receivers that trac' 9% and 9$ are called dual freuency receivers! #ual freuencyreceivers practically remove the ionosphere effects!Since the 9$ signal is not entirely available to the general public, sophisticated techniues have been implemented in receivers to e2tract the code and carrier information, even with the partialavailability of the 9$ signal! These techniues fully satisfy the reuirements of the users for non-military applications, while not compromising the .nti Spoof policy and security ob@ectives of the "S #epartment Ff #efense (#F#)!There has been some discussion on allowing a different freuency for civilian applications toseparate the #F# and civilian reuirements! ?e believe, however, that the e2isting system fullysatisfies the civilian reuirement, particularly since advancements in electronics integration havemade the technology affordable for broad civilian applications!
Troposphere:The lower level of the atmosphere, which contains water vapors, is called the troposphere! *t hasthe effect of slowing down both code and carrier! The effects of the troposphere cannot beremoved using dual freuency systems! The only way to remove the effects of the troposphere is by measuring its water vapor content, temperature and pressure, and applying a mathematicalmodel that can compute the delay of the troposphere!
Multipat':
*n measuring the distance to each satellite, we assume that the satellite signal travels directlyfrom the satellite to the antenna of the receiver! But in addition to the direct signal, there arereflected signals, from the ground and the ob@ects near the antenna, which also reach the antenna
through indirect paths and interfere with the direct signal! The compound signal creates anuncertainty about the true signal arrival time, much the same way as the echo from nearbymountains may cause uncertainty in the e2act time you hear your friends voice! *f the indirect path is considerably longer than the direct path (more than %& meters) such that the two patternsof signals can be separated, then the multipath effect can be substantially reduced by signal processing techniues!
4-%&

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 11/17
Global Positioning System
2eceiver Errors:
0eceivers may introduce some errors by themselves in measuring code or carrier! *n high uality
receivers, however, these errors are negligible (less than one millimeter) for carrier phase and afew centimeters for code phase!
Geometric Dilution of Precision (GDOP):
?e have been tal'ing about the errors in measuring distances to satellites, which are commonlyreferred to as ranging or range errors! The uestion is what is the relationship between the rangeerror and the error in computed position! Fr, in other words, how many meters of error areintroduced in our computed position as a result of one meter of error in measuring distances tothe satellitesThe answer is that it depends on the number and the geometry of the satellites used! *f four satellites are clustered near each other, then one meter of error in measuring distance may resultin tens or hundreds of meters of error in position! But if many satellites are scattered around thes'y, then the position error may be less than %!5 meters for every meter of error in measuringdistances! The effect of the geometry of the satellites on the position error is called Geometric#ilution Ff Precision (GDOP ), which can roughly be interpreted as the ratio of the position error to the range error!*magine the tetrahedron that is formed by lines connecting the receiver to each satellite used! Thelarger the volume of this tetrahedron, the smaller (better) the G#FP! *n most cases, the larger thenumber of satellites the smaller the G#FP!
Selective Availability: 'e Man-Made Errors:
rrors in the satellite cloc', the satellite orbit, the ionosphere, the troposphere, the multipath, andthe receiver typically amount to less than %& meters of range error, which, under typical G#FPsof about $, results in a position accuracy of about $& meters! The "S #epartment of #efense hasdetermined that providing this level of precision to the general public is against the "S nationalinterest! Therefore, #F# has introduced man-made intentional errors to degrade the positionaccuracy of GPS to about %&& meters! This intentional degradation is called Selective
Availability (SA) and is implemented by tethering the satellite cloc's and reporting the orbit of the satellites inaccurately! ilitary receivers are euipped with special hardware and codes that
4-%%

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 12/17
Global Positioning System
can mitigate the effect of S.! S. can be turned F> or F11 through ground commands by theGPS system administrators!
Poor GDOP Good GDOP
Summary
• We can adjust the receiver time to the accuracy of the GPS clock. This will make the
inexpensive clock of the receiver as ood as an atomic clock.
• !our is the minimum num"er of satellites that we need to compute position and time. #$ut
the more satellites we have the more accurate results we can et.%• &ual fre'uency receivers practically remove the ionosphere effects.
• (f the sinal indirect path is considera"ly loner than the direct path) more than *+
meters) then the multipath effect can "e su"stantially reduced "y sinal processin techni'ues.
Sources of *naccuracy: 'e Cures
.ssume you have two receivers not too far from each other! The errors due to the satellite cloc',the satellite orbit, the ionosphere, the troposphere and S. affect both receivers the same way andwith the same magnitude! *f we 'new the e2act location of one receiver, we could use thatinformation to calculate errors in the measurement and then report these errors (or correction
values) to the other receiver, so that it could compensate for them! This techniue is called#ifferential mode!
The distance between the base and rover receivers is called baseline! ?hen the baseline issmall, i!e! when the receivers are very close to each other, the range errors for the two receiversare nearly identicalN therefore, we could use the range errors calculated by the base to correct for the rover position! .s the baseline gets longer, the correlation between the range errors becomes
4-%$

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 13/17
Global Positioning System
wea'er! *n other words, there will be some residual errors in the computed position of the rover that depend on its pro2imity to base! .s a rule of thumb, you can e2pect an additional one-millimeter of error or uncertainty for every 'ilometer of baseline when dual freuency receiversare used! This is abbreviated as % ppm (one part per million)! 1or single freuency receivers thiserror increases to $ ppm!
The differential mode will remove most of all errors e2cept multipath and receiver errors! Theseerrors are local to each receiver and will not be canceled by the differential mode!The receiver error (or noise) is typically about %& cm for the code phase and about %-mm for thecarrier phase! *n high uality receivers these errors are even smaller by several times! Themultipath error, on the other hand, could be as much as several meters for the code phase andseveral centimeters for the carrier phase! Therefore, if we somehow deal with the multipatherrors, we can obtain millimeter level accuracy with carrier phase and decimeter accuracy withcode phase!
Multipat':
There are two techniues available to mitigate the effects of multipath/ a) Signal processingtechniue and b) ultipath 0e@ection +ho'e 0ings!
Signal Processing Techniue *n this method, the data is analyzed to separate the direct signalfrom the indirect signal(s)! Eou can imagine the echo of your voice in a canyon! *f the indirect path is substantially longer than the direct path, then you may be able to distinguish the two andconcentrate on the direct path! But if the difference is small, the echoed signal may be so close tothe direct signal that you cannot separate them! ?ith GPS signals, the signal processingtechniue is ineffective if the difference between the direct path and the indirect path is less thana few meters! 0emoving a multipath signal comes at the e2pense of removing part of the directsignal too, which in turn increases noise! Fftentimes, the more we try to remove the shortdistance multipath, the more noise we add!
ultipath re@ection cho'e rings This techniue wor's only for the multipath signals reflectedfrom ob@ects below the antenna! The reflected signal that hits the bottom side of the antenna can be re@ected! This techniue will do nothing for the reflected signals that hit the antenna on top,for e2ample a signal that is reflected off a building above the antenna!
1ortunately most of the times the signals that are reflected from ob@ects above the antenna have amultipath distance of more than %& meters and signal processing techniues can mitigate them!1or signals that are reflected off the ground, the multipath distance is in the order of a few metersand signal-processing techniues cannot do much to address them, but cho'e rings can! Because
of the complimentary nature of the two techniues, we can mitigate both near and !ar
"ultipaths!
C'o1e 2ing:
. cho'e ring ground plane consists of several concentric thin walls, or rings, around the center where the antenna element is located! The area between the rings creates #rooves! The principle of the operation of cho'e ring ground planes is as follows!
4-%;

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 14/17
Global Positioning System
The signal received by the antenna is composed of two components/ Direct and re!lecte$% Thegrooves have no effect on the direct signal other than decreasing the antenna gain at lowelevation anglesN for high elevation angles the cho'e ring ground plane wor's almost li'e a flatground plane! But the grooves have much effect on reflected signal from underneath!
C'o1e 2ing Antenna
The electromagnetic field of the reflected signal in the vicinity of the cho'e ring ground planecan be viewed as the sum of a primary and a secondary field waves! The ob@ective of the cho'ering ground plane is for the primary and secondary reflected signals to substantially cancel eachother and the direct signal to the antenna to remain as the dominant signal! *f the amplitude of the primary and the secondary waves are eual and the phase difference between them is %D°rees, then the two components of the reflected signal cancel each other at the antenna outputand multipath is suppressed! So, a given cho'e ring has optimum effect only at the particular freuency that has resonance behavior!1or a given cho'e ring ground plane, the complete suppression of multipath only occurs atcertain elevation anglesN at other angles, the multipath is suppressed partially! The ma2imumsuppression usually occurs at angles close to zenith, and minimal suppression at angles close tothe horizon!+ho'e rings are typically designed for one freuency! *f a cho'e ring is designed for 9% then ithas no effect on 9$, while if it is designed for 9$ then it has some benefits for 9%! 0ecently,dual-freuency cho'e rings have been introduced that allow separate optimization for 9% and 9$!
Summary:
• $ecause of the complimentary nature of the choke rin and the sinal processin
methods) we can mitiate "oth ,near, and ,far, multipaths.
• -hoke rins are typically desined for one fre'uency. (f a choke rin is desined for *
then it has no effect on /) while if it is desined for / then it has some "enefits for *. 0ew dual1fre'uency choke rins allow separate optimi2ation for * and /.
4-%4

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 15/17
Global Positioning System
4-%5
8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 16/17
Global Positioning System
4-%8

8/10/2019 GPS Basic Concepts 2
http://slidepdf.com/reader/full/gps-basic-concepts-2 17/17
Global Positioning System
4-%6