grace-fo processing at ife/luh
TRANSCRIPT

GRACE-FO processing at IfE/LUHIgor Koch, Mathias Duwe, Jakob Flury and Akbar Shabanloui Insitut für Erdmessung, Leibniz Universität Hannover/Germany
COST-G Team Meeting 2021 January 11-15, 2021
Online

Gravity field recovery at IfE
▪ GRACE-SIGMA: software package for gravity field recovery from GRACE and GRACE-FO sensor data
▪ Generalized dynamic orbit determination (variational equations approach)
▪ Initially all-MATLAB software [Naeimi et al., 2018]
▪ Several parts of the software converted to C/C++
▪ Mostly vectorized and parallelized
▪ Computation time one solution: app. 3.5 h (18 cores, 128 GB)
2

Overview
3
Orbit pre- adjustment
Gravity recovery- importing data - rotations - forces
Alt. acc. data
0. 1. 2.
iterative No iterations
Kin. orbits
Level 1B

Force modeling
4
Effect Model ReferenceGravity field GOCO06s (d/o: 300) Kvas et al., 2020
Third bodies Moon, Sun, Planets, Ephemerides: DE431 Folkner et al., 2014
Solid Earth tides IERS Conventions 2010 Petit a. Luzum, 2010
Ocean tides FES2014b Carrere et al., 2015
Solid Earth pole tides IERS Conventions 2010 Petit a. Luzum, 2010
Ocean pole tides IERS Conventions 2010 Petit a. Luzum, 2010
Relativistic IERS Conventions 2010 Petit a. Luzum, 2010
Non-tidal AOD1B RL06 Dobslaw et al., 2017
Atmospheric tides AOD1B RL06 Dobslaw et al., 2017
Non-gravitational ACT1B (GRACE C) TU Graz accelerometer data (GRACE D)
JPL, 2018 Behzadpour, 2020

Observations
• K-band range rates (5 s)
• LRI range rates in following releases
• Kinematic AIUB orbits as pseudo-observations (30 s)
5

Orbit screening
• Kinematic positions are compared to GNV1B orbit
• Epochs with 3D-difference >8 cm not considered in estimation
6
0 100 200 300 400 500 600 700 800 900 1000
epoch #
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
3D
dif.
[m
]

Weights
• KBRR:
2E-07 m/s (fixed)
• Kinematic positions:
diagonal elements of the orbit
covariance matrix (down-weighted by a factor 5)
𝜎KBRR =
𝜎Orbit =
7

GPS down-weighting
8
0 10 20 30 40 50 60 70 80 90 100
degree [-]
10-11
10-10
10-9
10-8
err
or
degre
e s
tandard
devi
atio
n [-]
202007
LUH down-weight
JPL
LUH no down-weight

Parameters
• Per 3h-arc:
• Initial state
• Accelerometer biases
• Empirical parameters [Kim, 2000]
• Per monthly solution:
• Full scale matrix [Klinger a. Mayer-Gürr, 2016]
• Gravity potential (d/o: 96)
9

Empiricals
• Bias A: 90 min
• Bias rate B: 90 min
• Periodic bias E,F: 3 h
• Periodic bias rate G,H: 3 h
10
⇢̇o � ⇢̇c = A+Bt+ (E + Ft) cosu+ (G+Ht) sinu<latexit sha1_base64="8736TZEVsxMVUt0wjXnIdkXCErE=">AAADCXichVHNThRBEC4GlT+VBY9eOm5MlkzczAIJXCCA/F1MMHGBhCWbmd5m6ezs9KS7hwQ2+wS+hi/gzXjl5lUv8iwe/LodMEAIPempqq+qvq6fJE+lsVH0eyQYffL02dj4xOTU8xcvpyszs/tGFZqLJlep0odJbEQqM9G00qbiMNci7iepOEh6753/4ExoI1X2yZ7n4rgfdzN5InlsAbUrq62OsoOWPlVtNXz33+BDtsLWww0b1rbCbTvHWlwZVrCQ1XbCXWcbmbGiXalG9cgfdl9plEqVyrOnKlfUog4p4lRQnwRlZKGnFJPBd0QNiigHdkwDYBqa9H5BQ5pEboEogYgYaA//LqyjEs1gO07jszleSXE1Mhm9xd32jAmi3asCuoH8g3vhse6DLww8s6vwHDIB44Rn/ADc0ikiHsvsl5HXtTye6bqydELLvhuJ+nKPuD75Dc8mPBpYz3sYbfnILjgSb59hAhlkExW4KV8zMN9xBzL2UniWrGSMwach3fRRD9bcuLvU+8r+fL2xUJ//uFhd2ygXPk6v6Q3VsNUlWqNd2kMdnL7QD/pJv4LPwdfgW/D9X2gwUua8olsnuPwLcJ6lRQ==</latexit>
0 10 20 30 40 50 60 70 80 90 100
degree [-]
10-11
10-10
10-9
10-8
err
or
de
gre
e s
tan
da
rd d
evi
atio
n [
-]
no emp.
with emp.

Screening / Outlier detection
11
1 2Main adjustment
Pre- adjustment
O-C range rates Post fit range rate residuals

Screening
12
1
Arcs will not be considered in main adjustment
0 50 100 150 200 250
arc number [-]
0
1
2
3
4
5
6
o-c
range r
ate
rm
s [m
/s]
10-6

Screening / Outlier detection
13
1 2Main adjustment
Pre- adjustment
O-C range rates Post fit range rate residuals

Screening
14
2
- Remove suspicious epochs - Recompute solution

Screening
15
2
- Remove suspicious epochs - Recompute solution
0 10 20 30 40 50 60 70 80 90 100
degree [-]
10-11
10-10
10-9
10-8
err
or
de
gre
e s
tan
da
rd d
evi
atio
n [
-]
before screening
after screening

Evaluation
• Spectral noise
• Spatial noise
• Signal content
• Coefficients C20 C30
16

Spectral noise
17
0 10 20 30 40 50 60 70 80 90 100
degree [-]
10-11
10-10
10-9
10-8
err
or
de
gre
e s
tan
da
rd d
evi
atio
n [
-]
CSR
GFZ
JPL
ITSG
AIUB
LUH
- w.r.t. mean solution of all centers - C20 zero tide - 2018/06 - 2020/08
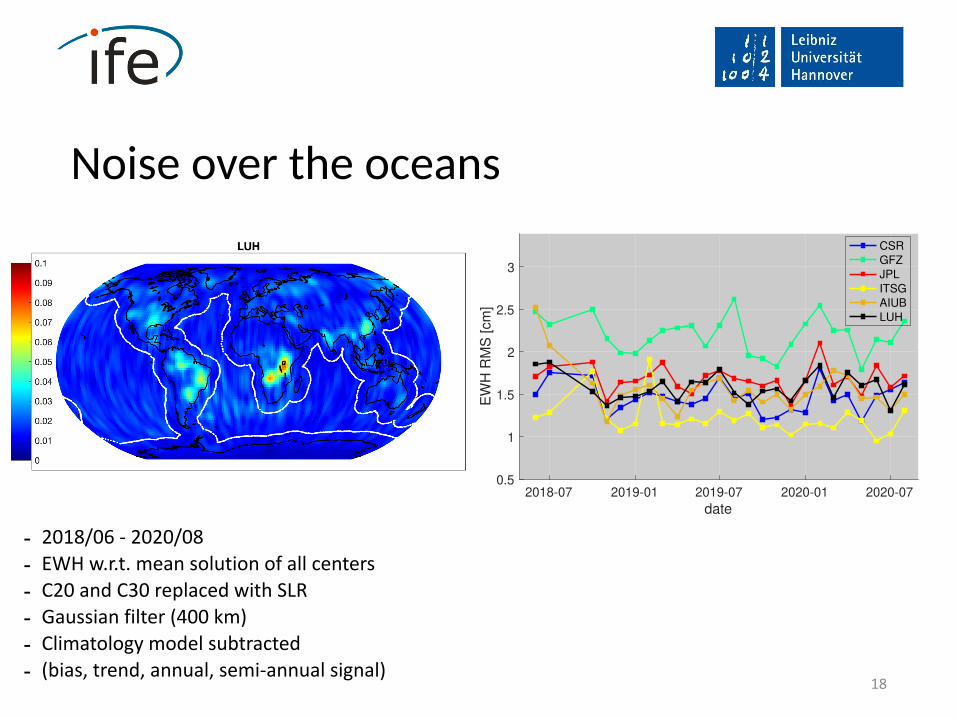
Noise over the oceans
18
2018-07 2019-01 2019-07 2020-01 2020-07
date
0.5
1
1.5
2
2.5
3
EW
H R
MS
[cm
]
CSRGFZJPLITSGAIUBLUH
- 2018/06 - 2020/08 - EWH w.r.t. mean solution of all centers - C20 and C30 replaced with SLR - Gaussian filter (400 km) - Climatology model subtracted - (bias, trend, annual, semi-annual signal)
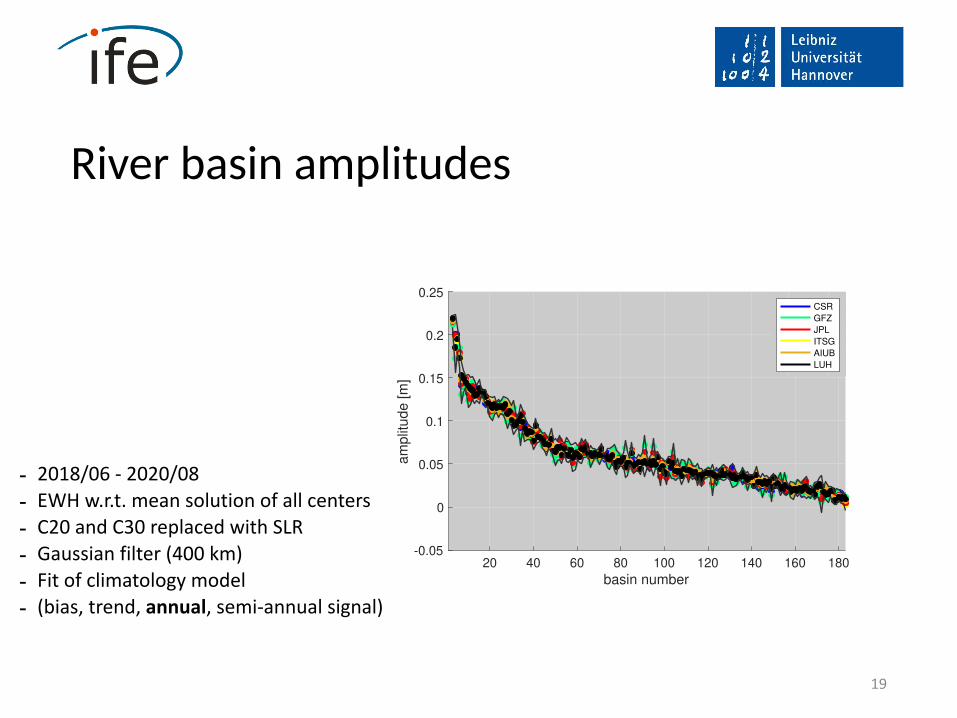
River basin amplitudes
19
20 40 60 80 100 120 140 160 180
basin number
-0.05
0
0.05
0.1
0.15
0.2
0.25
am
plit
ude [m
]
- 2018/06 - 2020/08 - EWH w.r.t. mean solution of all centers - C20 and C30 replaced with SLR - Gaussian filter (400 km) - Fit of climatology model - (bias, trend, annual, semi-annual signal)
0 10 20 30 40 50 60 70 80 90 100
degree [-]
10-11
10-10
10-9
10-8
err
or
de
gre
e s
tan
da
rd d
evi
atio
n [
-]
CSR
GFZ
JPL
ITSG
AIUB
LUH

Greenland mass trends
20
NW CW SW SE NE NO
drainage basin
-45
-40
-35
-30
-25
-20
-15
tre
nd
[G
t/yr
]
NW
SWSE
CW
NE
NO
- 2018/06 - 2020/08 - EWH w.r.t. mean solution of all centers - C20 and C30 replaced with SLR - Gaussian filter (400 km) - Fit of climatology model - (bias, trend, annual, semi-annual signal) - GIA, degree 1, .. not considered
0 10 20 30 40 50 60 70 80 90 100
degree [-]
10-11
10-10
10-9
10-8
err
or
de
gre
e s
tan
da
rd d
evi
atio
n [
-]
CSR
GFZ
JPL
ITSG
AIUB
LUH

Coefficients C20, C30
21

LUH-GRACE-FO-2020 solutions
▪ Solutions are computed operationally
▪ Available a few days after all needed GRACE-FO products are online (L1B, kinematic orbits, alt. acc)
▪ Solutions can be found on ICGEM and LUH data repo: ▪ http://icgem.gfz-potsdam.de/series/03_GRACE_other/LUH/LUH-GRACE-FO-2020
▪ https://data.uni-hannover.de/dataset/luh-grace-fo-2020
22

References
▪ Behzadpour et al. (2020): GRACE-FO accelerometer data recovery within ITSG-Grace2018 data processing, EGU General Assembly 2020.
▪ Carrere et al. (2015): FES 2014, a new tidal model on the global ocean with enhanced accuracy in shallow seas and in the Arctic region, EGU General Assembly 2015.
▪ Dobslaw et al. (2017): A new high-resolution model of non-tidal atmosphere and ocean mass variability for de-aliasing of satellite gravity observations: AOD1B RL06, Geophysical Journal International, Volume 211, Issue 1, Pages 263—269.
▪ Folkner et al. (2014): The Planetary and Lunar Ephemerides DE430 and DE431, IPN Progress Report 42-196.
▪ Kim (2000): Simulation Study of A Low-Low Satellite-to-Satellite Tracking Mission, Dissertation, University of Texas at Austin, 2000.
▪ Klinger and Mayer-Gürr (2016): The role of accelerometer data calibration within GRACE gravity field recovery: Results from ITSG-Grace2016, Advances in Space Research, 58, 1597.
▪ Kvas et al. (2020): GOCO06s – A satellite-only global gravity field model, Earth System Science Data Discussions.
▪ Naeimi et al. (2018): IfE monthly gravity field solutions using the variational equations, EGU General Assembly 2018, Vienna.
▪ Naeimi (2018): A modified Gauss-Jackson method for the numerical integration of the variational equations, EGU General Assembly 2018, Vienna.
▪ Petit and Luzum (2010): IERS Conventions (2010), IERS technical note 36, Verlag des Bundesamts für Kartographie und Geodäsie, Frankfurt am Main.
23