graduate program in acoustics applied research laboratory 8-13 july 2007 maxent 20072 application of...
TRANSCRIPT


8-13 July 2007 MaxEnt 2007 2
Graduate Program in Acoustics
Applied Research Laboratory
Application of the Maximum Entropy method to sonar signal processing
R. Lee Culver, H. John Camin, Jeffrey A. Ballard, Colin W. Jemmott, and Leon H. Sibul
Applied Research Laboratory and Graduate Program in AcousticsThe Pennsylvania State University, P.O. Box 30
State College, PA 16804
27th International Workshop onBayesian Inference and Maximum Entropy Methods in
Science and EngineeringSaratoga Springs, NY, July 8-13, 2007
Work supported by Office of Naval Research

8-13 July 2007 MaxEnt 2007 3
Graduate Program in Acoustics
Applied Research Laboratory
Outline
• Sonar application description• Domain of existing solutions• A new Estimator-Correlator detector that makes
use of the Maximum Entropy principal• An example: the 1996 Strait of Gibraltar
Acoustic Monitoring Experiment (SGAME)• Planned extensions

8-13 July 2007 MaxEnt 2007 4
Graduate Program in Acoustics
Applied Research LaboratoryProblem description
Horizontal line array(plan view)
Fan ofnarrow beams In
crea
sing
tim
e
frequency
time-frequency plotfor a single beam
Problem: Many signals are detected, but what and where are the sources?
successiveFFTs of
one beam
detectedlines

8-13 July 2007 MaxEnt 2007 5
Graduate Program in Acoustics
Applied Research Laboratory
Matched Field Processing
source
vertical line array(side view)
bottom
surface
acousticrays
8-13 July 2007 MaxEnt 2007 6
Graduate Program in Acoustics
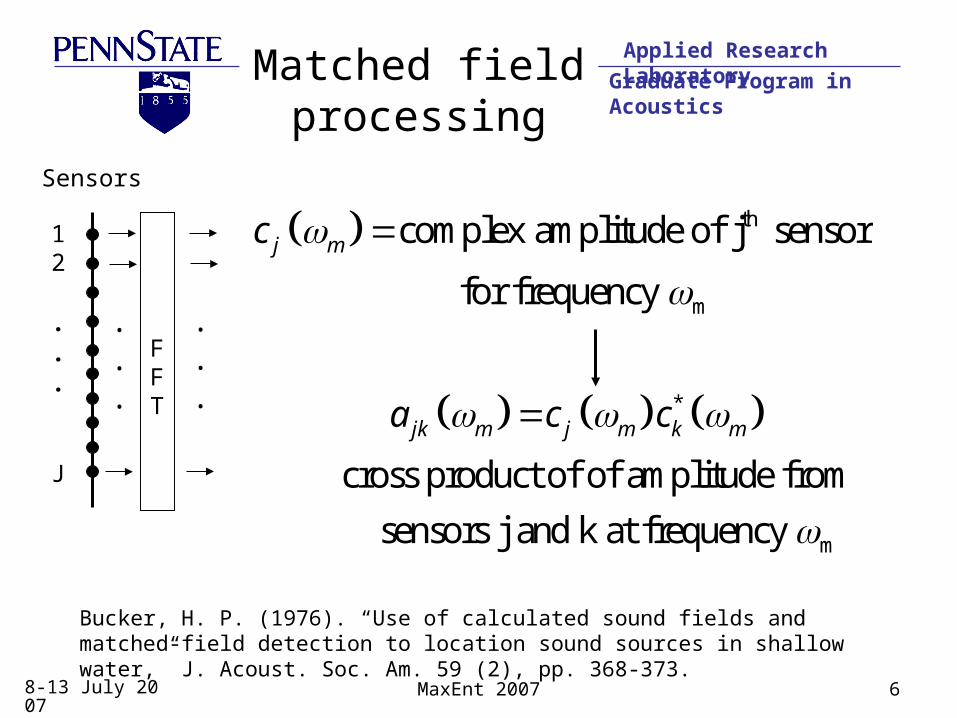
Applied Research LaboratoryMatched field processing
Bucker, H. P. (1976). “Use of calculated sound fields and matched-field detection to location sound sources in shallow water,” J. Acoust. Soc. Am. 59 (2), pp. 368-373.
Sensors
th
m
complex amplitude of j sensor
for frequency
j mc
FFT
.
.
.
.
.
.
12
.
.
.
J
*
m
cross product of of amplitude from
sensors j and k at frequency
jk m j m k ma c c

8-13 July 2007 MaxEnt 2007 7
Graduate Program in Acoustics
Applied Research LaboratoryMatched field processing
0
Let , represent a set of cross-spectral elements
calculated using knowledge of the environment and
and acoustic propagation model for a source at location .
Let represent the set of
jk m
jk m
a
a
x
x
-1 0*
1 1,
cross-spectral elements
obtained from the array, where indicates time average.
Define the Detection Factor (DF) as follows:
DF , = N ,
(J = # of
J J
m jk m jk mj k j
a a x x
sensors, N = normalization factor)

8-13 July 2007 MaxEnt 2007 8
Graduate Program in Acoustics
Applied Research LaboratoryMatched field processing
Bucker, H. P. (1976).J. Acoust. Soc. Am. 59 (2),
pp. 368-373.Range, kyd
Dep
th,
yd
DF , mx

8-13 July 2007 MaxEnt 2007 9
Graduate Program in Acoustics
Applied Research LaboratoryOptimum Uncertain
Field Processor
Richardson, A. M. and L. W. Nolte (1991). “A posteriori probability source localization in an uncertain sound speed, deep ocean environment,” J. Acoust. Soc. Am. 89, pp. 2280-2284.
Richardson and Nolte applied a Bayesian method
to this problem.
The observations consist of signal and additive noise :
, ,
is the set of source location parameters.
is the paramete
r s n
r s S Θ Ψ n
S
Θ rs describing the transmitted waveform.
is the parameters describing the propagation medium.Ψ
8-13 July 2007 MaxEnt 2007 10
Graduate Program in Acoustics
Applied Research LaboratoryOptimum Uncertain
Field Processor
||
| , ,
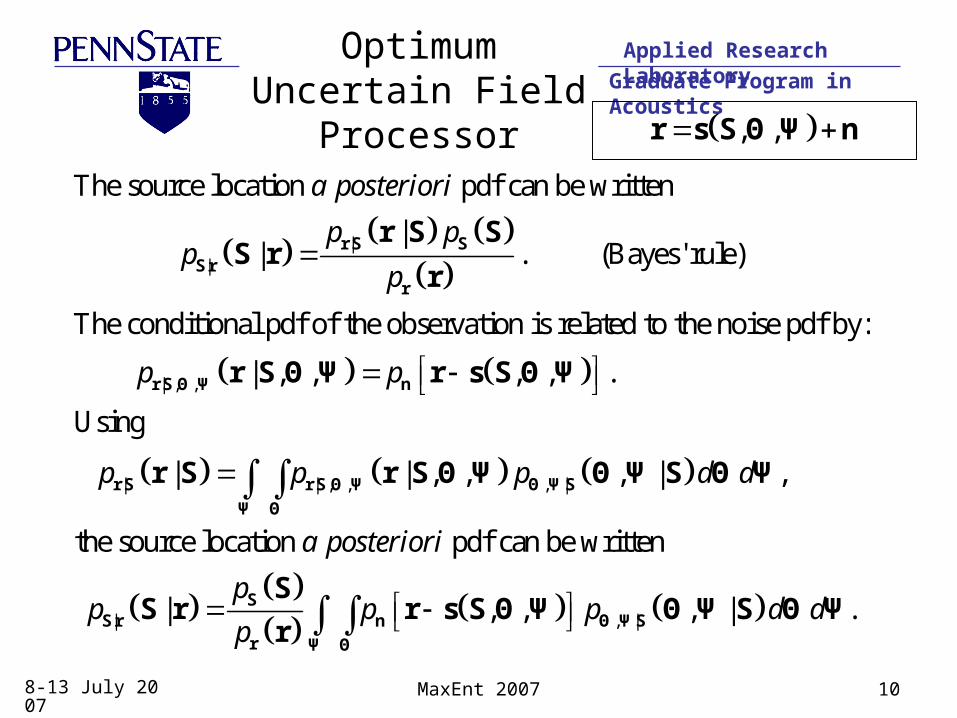
The source location pdf can be written
|| . (Bayes' rule)
The conditional pdf of the observation is related to the noise pdf by:
| , , , , .
Usi
a posteriori
p pp
p
p p
r S SS r
r
r S Θ Ψ n
r S SS r
r
r S Θ Ψ r s S Θ Ψ
| | , , , |
| , |
ng
| | , , , | ,
the source location pdf can be written
| , , , | .
p p p d d
a posteriori
pp p p d d
p
r S r S Θ Ψ Θ Ψ S
Ψ Θ
SS r n Θ Ψ S
r Ψ Θ
r S r S Θ Ψ Θ Ψ S Θ Ψ
SS r r s S Θ Ψ Θ Ψ S Θ Ψ
r
, , r s S Θ Ψ n

8-13 July 2007 MaxEnt 2007 11
Graduate Program in Acoustics
Applied Research LaboratoryOptimum Uncertain
Field Processor
| , |
|
So
| , , , |
is the general expression for the optimum uncertain field
processor. Maximum (MAP) estimates of are the
values of that maximize | .
pp p p d d
p
a posteriori
p
SS r n Θ Ψ S
a Ψ Θ
S r
SS r r s S Θ Ψ Θ Ψ S Θ Ψ
a
S
S S r
Richardson and Nolte find MAP estimates of for Gaussian .pnS n
, , r s S Θ Ψ n

8-13 July 2007 MaxEnt 2007 12
Graduate Program in Acoustics
Applied Research LaboratoryOptimum Uncertain
Field Processor
• The optimum uncertain field processor cannot be applied to our problem for two reason.1. Our array is horizontal, not vertical. With no vertical aperture,
vertical structure (multipath) in the sound field is not observed.
2. The noise field is not necessarily Gaussian (See E. J. Wegman, S.C. Schwartz and J. B. Thomas eds., Topics in Non-Gaussian Signal Processing, Springer-Verlag, New York, 1988.).
• Therefore, we take a different approach to obtain a processor that can be applied to our problem.• Use a propagation model to predict signal parameter statistics• Look for statistical clues in the observation (received signal)
J. A. Ballard (2007). “The Estimated Signal Parameter Detector”, M.S Thesis (The Pennsylvania State University, State College, PA).

8-13 July 2007 MaxEnt 2007 13
Graduate Program in Acoustics
Applied Research Laboratory
pdf of signal from near-surface source (H1)
Source nearthe bottom
Source nearthe surface
Receive array pdf of signal fromnear-bottom source (H2)
The underlying assumption is that sources at different locations will generate different received statistics
The Estimated Ocean Detector
1
2
Form the binary hypothesis test for observation :
H : source is near the surface = { , }
H : source is near the bottom.
1 1 2
2
r
r s n S s s
r s n
p1(r)
p2(r)

8-13 July 2007 MaxEnt 2007 14
Graduate Program in Acoustics
Applied Research Laboratory
| 1 1 1
We require that the conditional pdfs belong to the exponential class
which has the following form:
| ,H ( )exp , 2p K g B r Ψ r Ψ Ψ r Ψ r
1
The source waveform is a continuously transmitted sinusoid with constant,
known frequency and phase, and time-varying amplitude.
Form the likelihood ratio ( describes the medium).
| Hln
| H
p
p
Ψ
rr
r
| 11
2 2 | 2
| ,H
ln ln 1| ,H
p p dp
p p p d
r Ψ Ψ
Ψ
r Ψ Ψ
Ψ
r Ψ Ψ Ψr
r r Ψ Ψ Ψ
S.C. Schwartz, “The Estimator-Correlator for Discrete-Time Problems,” IEEE Trans. On Information Theory, Vol. 23, No. 1, January 1977, pp. 93-100.
The Estimated Ocean Detector

8-13 July 2007 MaxEnt 2007 15
Graduate Program in Acoustics
Applied Research Laboratory
| 1 1 1
1 1
| ,H ( )exp , 2
Here ( ), , and are arbitrary functions. We have
extended Schwartz's derivation somewhat, in that he specified that
the term to depended only on ,
p K g B
K g B
g
r Ψ r Ψ Ψ r Ψ r
Ψ r Ψ r
r
| 1 1 1
so that the conditional pdf was
| ,H ( )exp , 3
whereas we allow to depend upon both and .
This provides some added flexibility in finding an appropriate
conditional pdf.
p K g B
g
r Ψ r Ψ Ψ Ψ r r
r Ψ
The Estimated Ocean Detector

8-13 July 2007 MaxEnt 2007 16
Graduate Program in Acoustics
Applied Research LaboratoryThe Estimated Ocean Detector
1 2
1
1 | 1
The and terms have the same form, and we present the
derivation of . We differentiate:
| ,H 4
Using of the exponental form of the conditional pdf and Bayes' rul
p p
p
p p p d
r Ψ Ψ
Ψ
r r
r
r r Ψ Ψ Ψr r
1 1 1 | 1
1 1 | 1 1
e:
, | ,H
, | ,H 5
p g B p p d
g B p p d
r Ψ Ψ
Ψ
Ψ r
Ψ
r r Ψ r r Ψ Ψ Ψr r r
r Ψ r Ψ r r Ψr r
Bayes’ rule

8-13 July 2007 MaxEnt 2007 17
Graduate Program in Acoustics
Applied Research LaboratoryThe Estimated Ocean Detector
11 | 1 1
1
11 | 1
Simplifying, we obtain:
,1| ,H 6
We define the conditional moment function:
,| ,H conditional moment 7
which is an extention to Schwart's condition
gp p d B
p
gh p d
Ψ r
Ψ
Ψ r
Ψ
r Ψr Ψ r Ψ r
r r r r
r Ψr Ψ r Ψ
r
11 | 1
al mean:
| ,H (Schwartz's conditional mean)Schwartz gh p d
Ψ r
Ψ
rr Ψ Ψ r Ψ
r

8-13 July 2007 MaxEnt 2007 18
Graduate Program in Acoustics
Applied Research LaboratoryThe Estimated Ocean Detector
11
1
11 1
1 1 1 1
1 1 2 2
1Using ln and the conditional moment, we can write
ln 8
which can be integrated to obtain
exp 9
where . and are similarly defined,
and the lo
pp
p
Bp h r
p c G B
G h d G B
r
rr
r r r
rr
r r
r r r
r r r
1 1
1 1 2 222
g likelihood ratio becomes
. 10p cn l G B G B n cp
r
r r r r rr

8-13 July 2007 MaxEnt 2007 19
Graduate Program in Acoustics
Applied Research Laboratory
Calculatesignal
parameter pdf
Calculatesignal
parameter pdf
2B r
1B r
1h
Received Signal, r
Conditional Moment
Functions
1G r
2G r2h
1p
1
2
lnH
H
r
H1
H2
--
The Estimated Ocean Detector
211
21 2G rG r B r cr n cB r
2p
8-13 July 2007 MaxEnt 2007 20
Graduate Program in Acoustics
Applied Research LaboratoryThe Estimated Ocean Detector
| 1 1 1
0
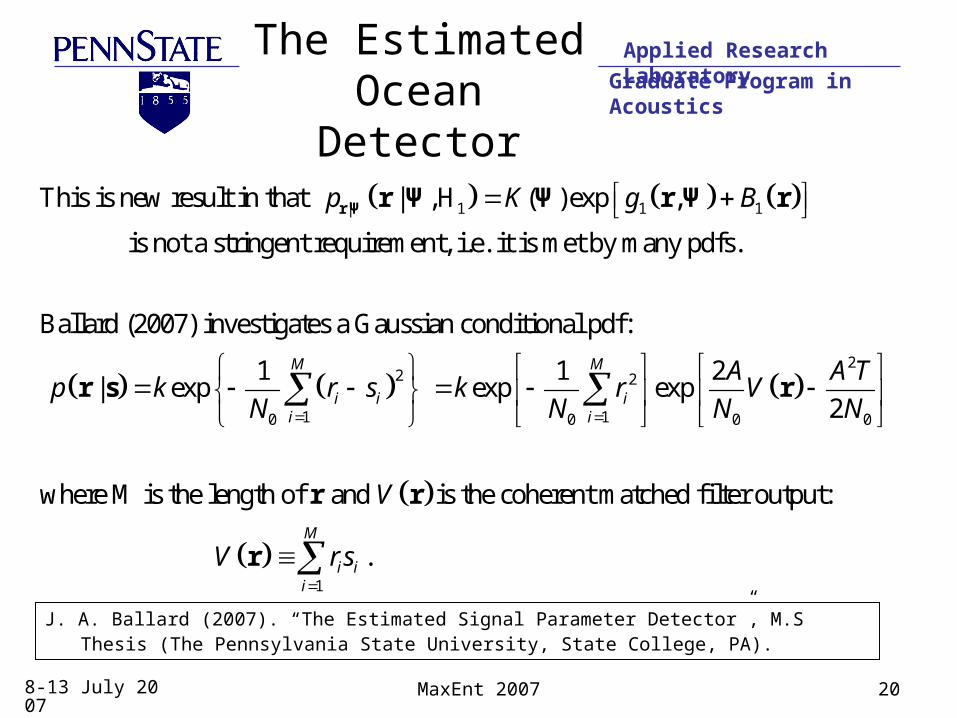
This is new result in that | ,H ( )exp ,
is not a stringent requirement, i.e. it is met by many pdfs.
Ballard (2007) investigates a Gaussian conditional pdf:
1| exp
p K g B
p kN
r Ψ r Ψ Ψ r Ψ r
r s
22 2
1 10 0 0
1
1 2exp exp
2
where M is the length of and is the coherent matched filter output:
.
M M
i i ii i
M
i ii
A A Tr s k r V
N N N
V
V r s
r
r r
r
J. A. Ballard (2007). “The Estimated Signal Parameter Detector”, M.S Thesis (The Pennsylvania State University, State College, PA).

8-13 July 2007 MaxEnt 2007 21
Graduate Program in Acoustics
Applied Research LaboratoryThe Estimated Ocean Detector
1
2
10 0
2
20 0
When the signal is a sinusoid with known frequency and phase, and
random amplitude, i.e. cos , the likelihood ratio test is:
2ln exp
2ln exp
A
A
s A t
A TAV r p A dA
N N
A TAV r p A
N N
2
1
2
ln .
H
dA
H

8-13 July 2007 MaxEnt 2007 22
Graduate Program in Acoustics
Applied Research LaboratoryThe Estimated Ocean Detector
2 21 1 2 2
An interesting case is when the prior distributions for amplitude A are
Gaussian with equal means but different variances, i.e.
, , ,
The log likelihood ratio is found to have the
p A N m p A N m
12
2
form
2
The detector computes the variance of the matched filter output.
H
TmV r
H

8-13 July 2007 MaxEnt 2007 23
Graduate Program in Acoustics
Applied Research LaboratoryThe Estimated Ocean Detector
p1(A)
p2(A)
21
2102
probability of detection; probability of false alarm;
SNR = signal-to-noise ratio; SSR = 10 log
D FAP P
performanceimproves

8-13 July 2007 MaxEnt 2007 24
Graduate Program in Acoustics
Applied Research LaboratoryApplying the MaxEnt Method
• We use the MaxEnt method in two ways:– Obtain by fitting an exponential (or MaxEnt) pdf to
noise samples that do not contain signal, e.g. from another beam or at another frequency (or both).
– Use an acoustic propagation model and Monte Carlo simulation to produce samples of A under H1 and H2, and use MaxEnt to estimate the prior pdfs p1(A) and p2(A).
– In both cases, we compute sample moments from the data and apply the gradient method developed by Mohammad-Djarari (1991). (I think I need to spend some more time on this part of the approach).
|np r s

8-13 July 2007 MaxEnt 2007 25
Graduate Program in Acoustics
Applied Research Laboratory
P1
P6
P7
P4
P5
P3
P2
1996 Strait of Gibraltar Acoustic Measurement Experiment (SGAME)
Tx = projectorRx = hydrophonePn = groupings of CTD drops.
• Worcester, Send, Curnuelle and Tiemann (1997), in Shallow-Water Acoustics, Bejing, China.• Tiemann, Worcester and Cornuelle (2001), JASA 109 and 110 (2 kHz data only).
• Warm, fresh surface layer of Atlantic water moving east over salty, cool layer of Mediterranean water moving west.• Strong internal tide• East-moving tidal bores released after high tide.
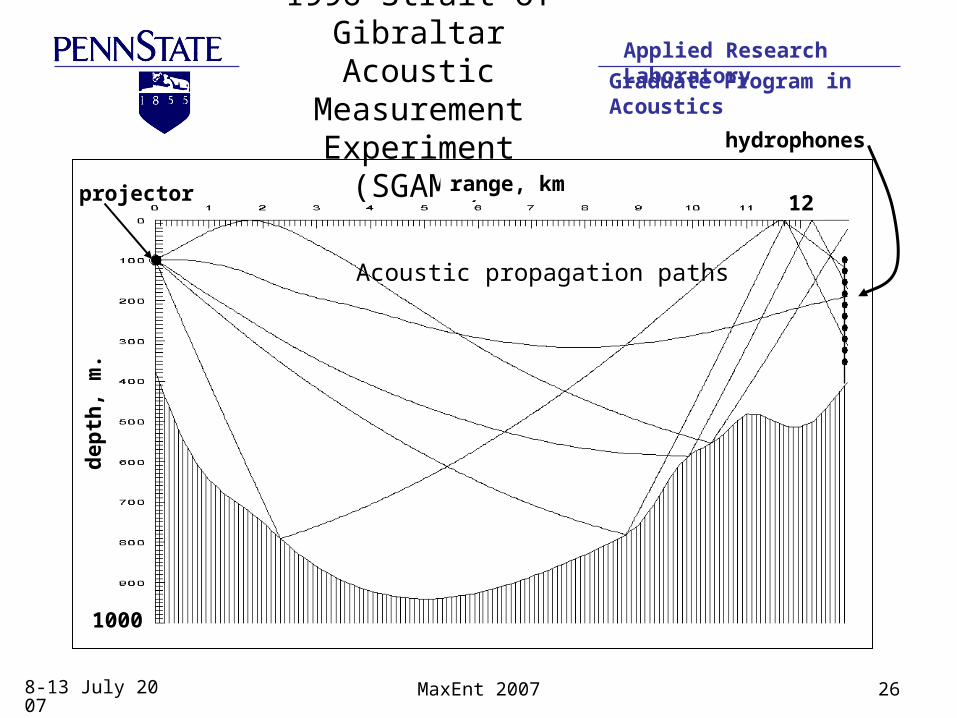
8-13 July 2007 MaxEnt 2007 26
Graduate Program in Acoustics
Applied Research Laboratory
hydrophones
projector
1996 Strait of Gibraltar Acoustic Measurement Experiment (SGAME)
dep
th, m
.
1000
range, km12
Acoustic propagation paths
8-13 July 2007 MaxEnt 2007 27
Graduate Program in Acoustics
Applied Research Laboratory
yearday 1996
Hei
gh
t, m
.H
eig
ht,
m.
yearday 1996
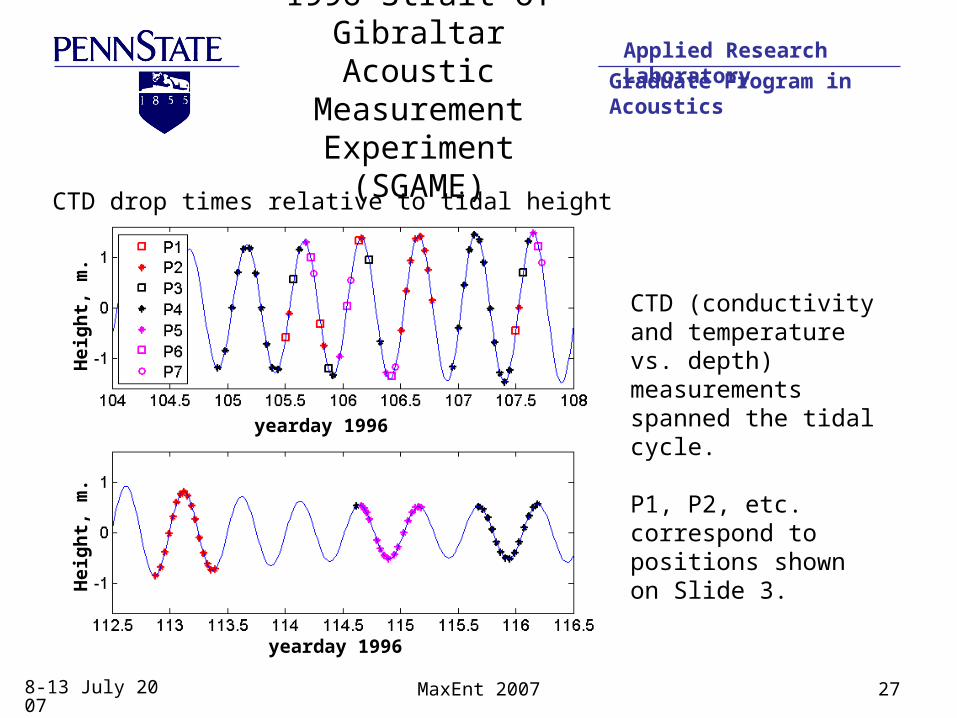
1996 Strait of Gibraltar Acoustic Measurement Experiment (SGAME)
CTD (conductivity and temperature vs. depth) measurements spanned the tidal cycle.
P1, P2, etc. correspond to positions shown on Slide 3.
CTD drop times relative to tidal height

8-13 July 2007 MaxEnt 2007 28
Graduate Program in Acoustics
Applied Research Laboratory1996 Strait of Gibraltar Acoustic Measurement Experiment (SGAME)
Propagation loss predicted using RAM
Collins, M. (1993). “A split-step Padá solution for the parabolic equation method,” J. Acoust. Soc. Am, 93, pp. 1736-1742.

8-13 July 2007 MaxEnt 2007 29
Graduate Program in Acoustics
Applied Research LaboratoryApplying the MaxEnt Method
0 10
The entropy is
ln
The constraints are
where the are estimated from the data. We form N equations:
, ,... exp , 0,1,
Solving for the ' , we o
n n n
n
N
n N n k k nk
H p A p A dA
E A A p A dr
G A A dA n N
s
1,2 0 1 2
btain
exp ln .p A A A

8-13 July 2007 MaxEnt 2007 30
Graduate Program in Acoustics
Applied Research LaboratoryApplying the MaxEnt Method
0
0
0 0
0
The equations for G are linearized around a trial value .
The resulting equations are
The system is solved for , which becomes the new , and the
iteration continues unt
T
n n n nG G G
λ λ
λ
λ λ λ λ λ
λ λ
0il becomes arbitrarily small.λ λ
Mohammad-Djafari, A. (1992). “Maximum Likelihood Estimate of the Lagrange parameters of the Maximum Entropy Distributions,” in Maximum Entropy and Bayesian Methods, Proc. 11 th International Workshop on Maximum Entropy and Bayesian Methods of Statistical Analysis, Ed. C. R. Smith, G. J. Erickson, and P. O. Neudorfer (Kluwer Academic, Dordrecht, NL).

8-13 July 2007 MaxEnt 2007 31
Graduate Program in Acoustics
Applied Research LaboratoryApplying the MaxEnt Method
Received pressure, dB re 1µPa
Rel
ativ
e oc
curr
ence
* Histogram of measured received pressure MaxEnt pdf fit to received pressure MaxEnt pdf fit to RAM predictions

8-13 July 2007 MaxEnt 2007 32
Graduate Program in Acoustics
Applied Research LaboratoryApplying the MaxEnt Method
* Histogram of measured received pressure MaxEnt pdf fit to received pressure MaxEnt pdf fit to RAM predictions

8-13 July 2007 MaxEnt 2007 33
Graduate Program in Acoustics
Applied Research Laboratory
Summary
• We have used an Estimator-Correlator structure to develop a Maximum Likelihood detector that can accept any exponential class noise pdf (not just a Gaussian).
• The MaxEnt method has been used to obtain exponential class pdfs. Example shown for 1996 Strait of Gibraltar Acoustic Monitoring Experiment (SGAME).
• We are learning about the MaxEnt method.