how many dof has a human arm? - polito.it · how many dof has a human arm? c y ... (joint 3 is...
TRANSCRIPT

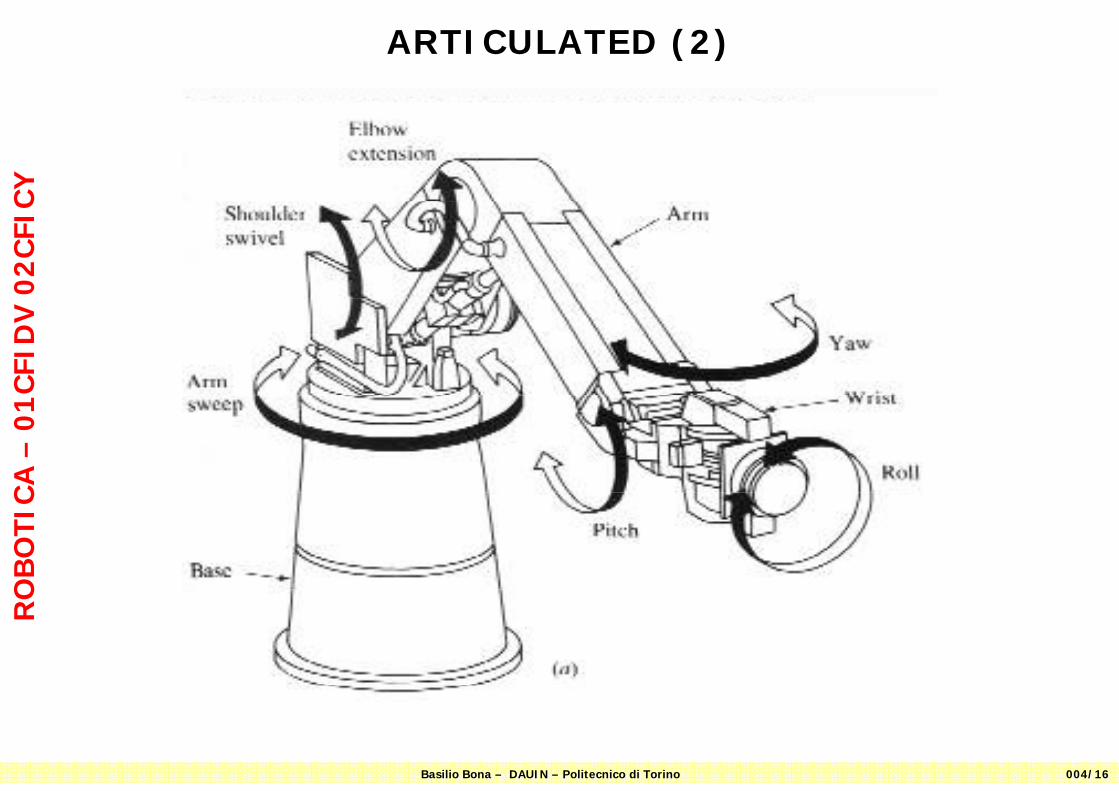
How many dof has a human arm?C
Y
This mechanical arm simulates the human arm
1
Shoulder
02
CFI
C
Shoulder 4 domWrist 3 dom
12
CFI
DV
Usually industrial robots have a shoulder with 3 dom(joint 3 is missing), and a
3
75
CA
–0
1 (joint 3 is missing), and a wrist similar to this one4
75
OB
OTI
C
6 Wrist
RO
Basilio Bona – DAUIN – Politecnico di Torino 004/1

Robotic arms An industrial robot has an arm and a wrist.
CY
The robot type is defined by the arm configuration, and depends on the type of joints in the arm. They are called P and R
P i ti j i t
02
CFI
C P = prismatic joint
R = rotoidal joint
CFI
DV
Robots are classified according to the following types
CA
–0
1
Cartesian 3P
Cylindrical 2P-1R
OB
OTI
C
Polar or Spherical 1P-2R
SCARA 1P-2R; SCARA = Selective Compliance Assembly Robot Arm
RO Articulated or Anthropomorphic 3R
The there are parallelparallel robots, that does not follow this classification
Basilio Bona – DAUIN – Politecnico di Torino 004/2
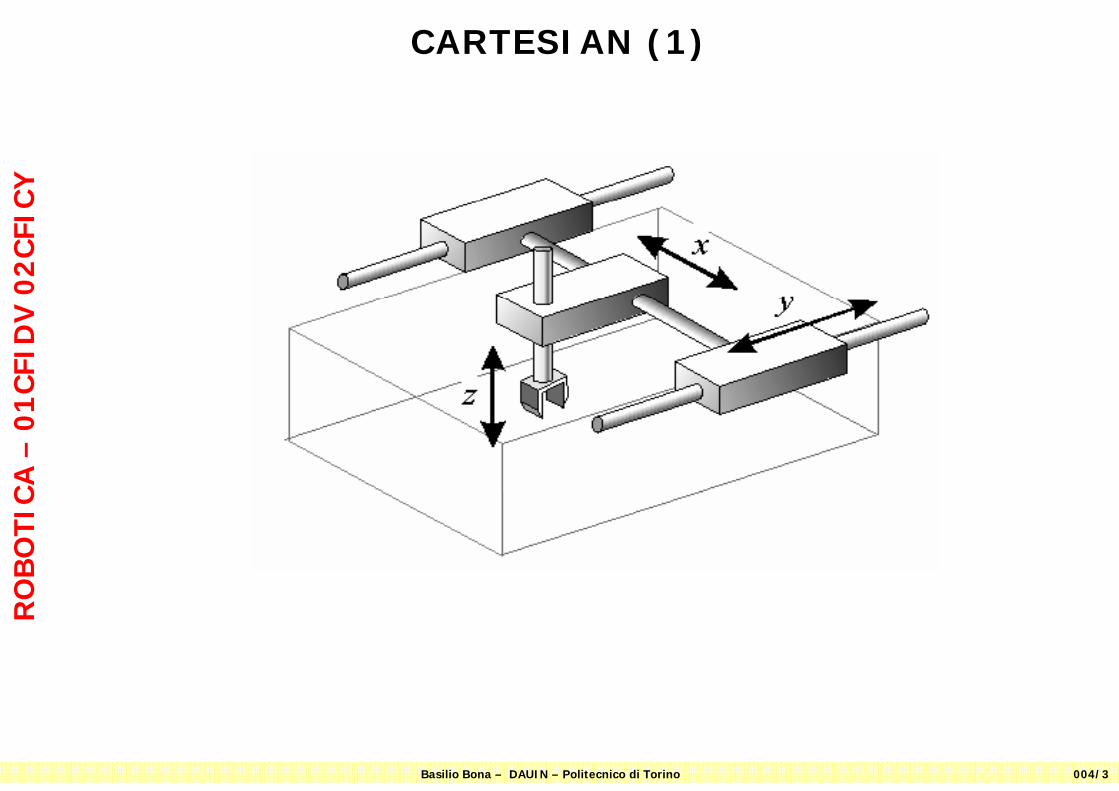
CARTESIAN (1)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/3
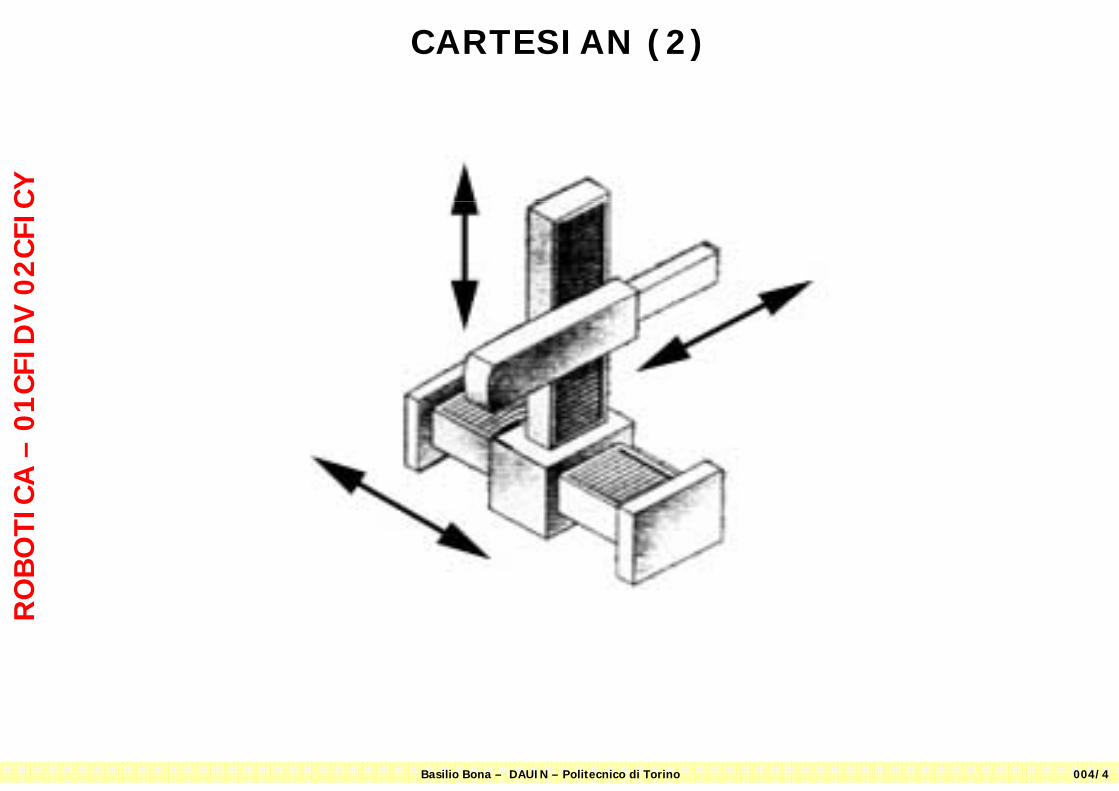
CARTESIAN (2)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/4

CARTESIAN (3)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/5

CARTESIAN (4)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/6

CYLINDRICAL (1)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/7

CYLINDRICAL (2)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/8

CYLINDRICAL (3)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/9
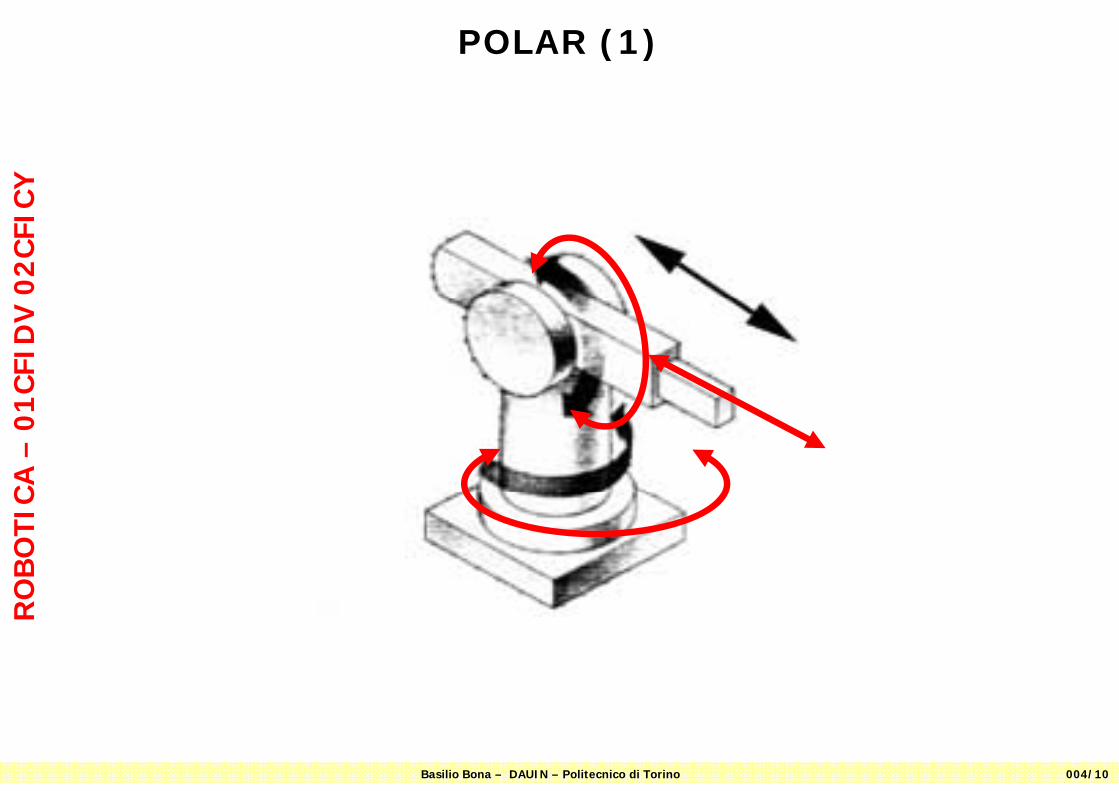
POLAR (1)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/10

POLAR (2)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/11

SCARA (1)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/12
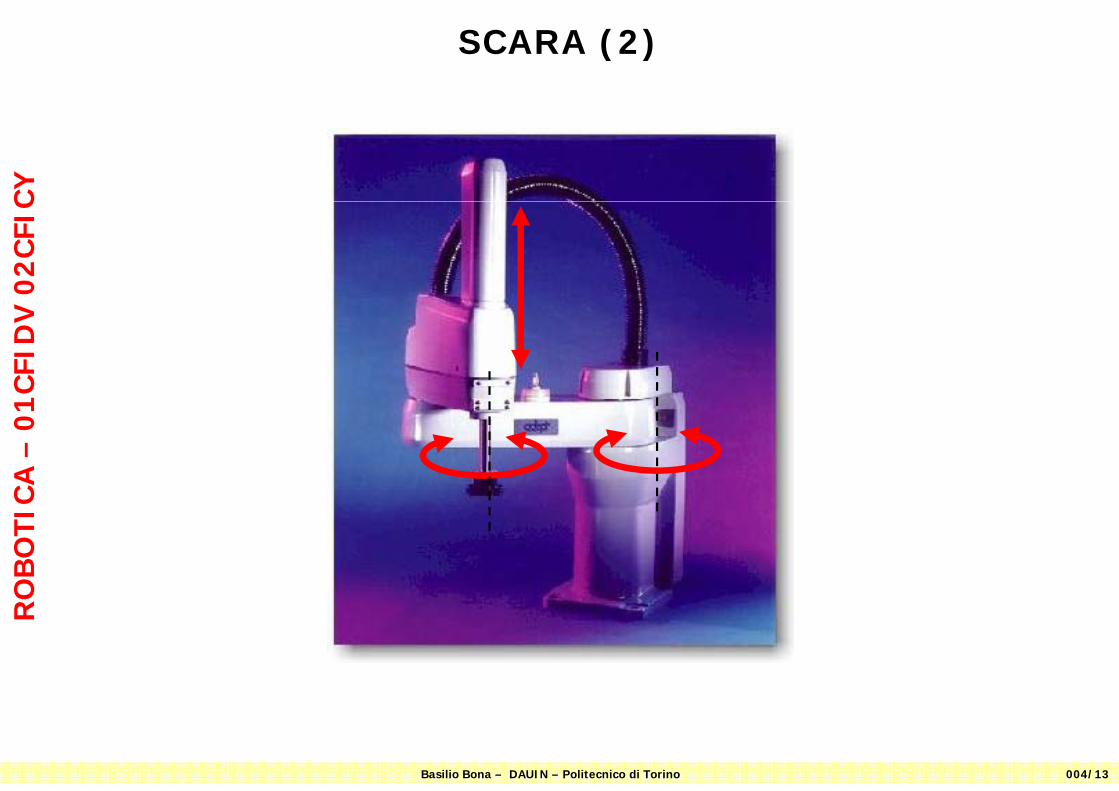
SCARA (2)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/13

SCARA (3)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/14

ARTICULATED (1)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/15
ARTICULATED (2)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/16

ARTICULATED (3)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/17

ARTICULATED (4)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/18

PARALLEL (1)
I ll l t t th j i t
CY
In parallel structures, the joint motion must follow the constrains given by the
02
CFI
C kinematic chain This is a closed kinematic chain
CFI
DV
chain
Often this structure is known as
CA
–0
1 Steward platform
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/19

PARALLEL (2)C
Y0
2C
FIC
CFI
DV
C
A –
01
OB
OTI
CR
O
Basilio Bona – DAUIN – Politecnico di Torino 004/20