http://lasa.epfl.ch a.g. billard, autonomous robots class spring 2007 course shs program in...
TRANSCRIPT

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Course SHSProgram in Cognitive Psychology
Spring 2007
Human-Robot InteractionUser-centred design of social robots
Aude G Billard
Learning Algorithms and Systems Laboratory - LASAEPFL, Swiss Federal Institute of Technology
Lausanne, Switzerland

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Body
Why is Aesthetic important?

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Body
It is a truism that people will be more inclined to interact with “attractive” faces than with “unattractive” ones.
Typical appealing features are large eyes, symmetric and round faces, pink cheeks and big eyelashes.
Dolls’ faces versus Monster’s faces?
C. DiSalvo, F. Gemperle, J. Forlizzi, and S. Kiesler. All robots are not created equal: The design and perception of humanoid robot heads. In Proc. Designing Interactive Systems, pages 321: 326, 2002.

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Body
19th-20th Century: Automata (Automated toys)
• Mimicking the body and behavior of an animals• Only one single behavior• Completely preprogrammed in the mechanics• The aesthetic was very important – pieces of art

SDR-3X, Sony Dream Robot50cm, 5 Kg, 24 DOFs
OS: Aperios, OPEN-R, 16MB memory stick
CCD Color Camera, Microphone (x2), IR distance, Acceleration,
Touch Detection (x8), SpeakerWalking Speed, 15m per minute
HOAP-1 Fujitsu Laboratory Ltd.48 cm, 6 kg, 20 DOF,
OS: RT-LinuxUSB 1.0 (12Mbps)
PINO Kitano ERATO Project, Tokyo
Sound and Vision
Mini-Humanoids

Baby Robots
My Real Baby (2000)IRobot Corp, Boston, USA
Robota (1997-2002)Univ. of Edinburgh 1997-1998, EPFL (Switzerland) 1998-1999DIDEL SA (Switzerland) 1999-2007
CSI, Paris, France 2000-2002USC, Los Angeles,2001-2002

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Body
"uncanny valley"[Mori 1970]

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Face
Surprisingly, however, many of the humanoid robots developed so far have more in common with monsters
than with dolls.
Maverick, 2001RIKEN & USC
Berthoc, 2006Univ. Bielefeld

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Face
Another set of attempts
University of Pisa & Jet Propulsion Lab
Kobayashi / Ishiguro’s LabScience University of Tokyo,
2001

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Human-like body
BiPed Locomotion
Kawato Erato Project,ATR, Kyoto, Japan
YFX Studios,Japan, USA
• Binocular Vision
• Anthropomorphic Hands• Anthropomorphic Arms
University of Karslruhe, Germany BIP 2000, CRNS, France
• Anthropomorphic Head

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Body
Repliee R1: Ishiguro’s lab, Osaka Univ.
This android has 9 degree of freedom in her head.
She can move her eyes, eyelids, mouth, and neck.
Its body is covered with silicone, so the skin feels humanlike.And it has 4 high sensitivity skin sensors under the skin.

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Body
Repliee R2: Ishiguro’s lab, Osaka Univ.
Facial expressions of the adult android: 13 of the 42 actuators are used in the head. Humanlike facial expressions are realized by the motion of the eyes and mouth.

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Body
Together with the company Kokoro, Ishiguro’s lab at Osaka Univ has developed a new life-like android called Actroid DER2. This android looks very human and talks and moves its head, arms, hands, and body. This android is available for rental now at the rate of $3,500 for 5 days.
A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
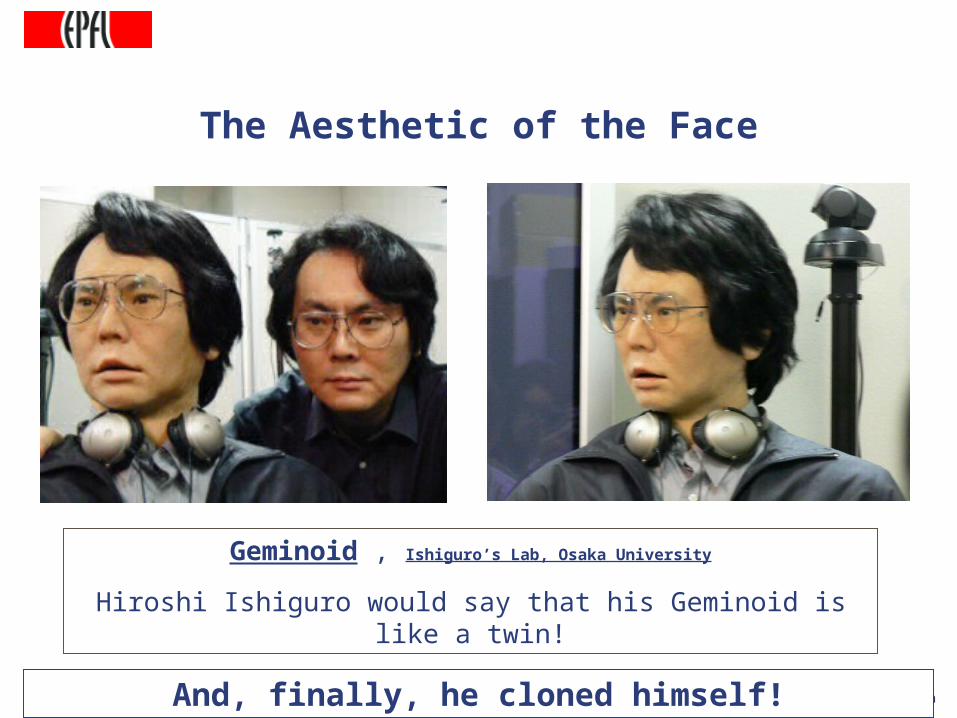
The Aesthetic of the Face
And, finally, he cloned himself!
Geminoid , Ishiguro’s Lab, Osaka University
Hiroshi Ishiguro would say that his Geminoid is like a twin!

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Face
The realism of the facial expressions are as important as the overall
aesthetic of the face
A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
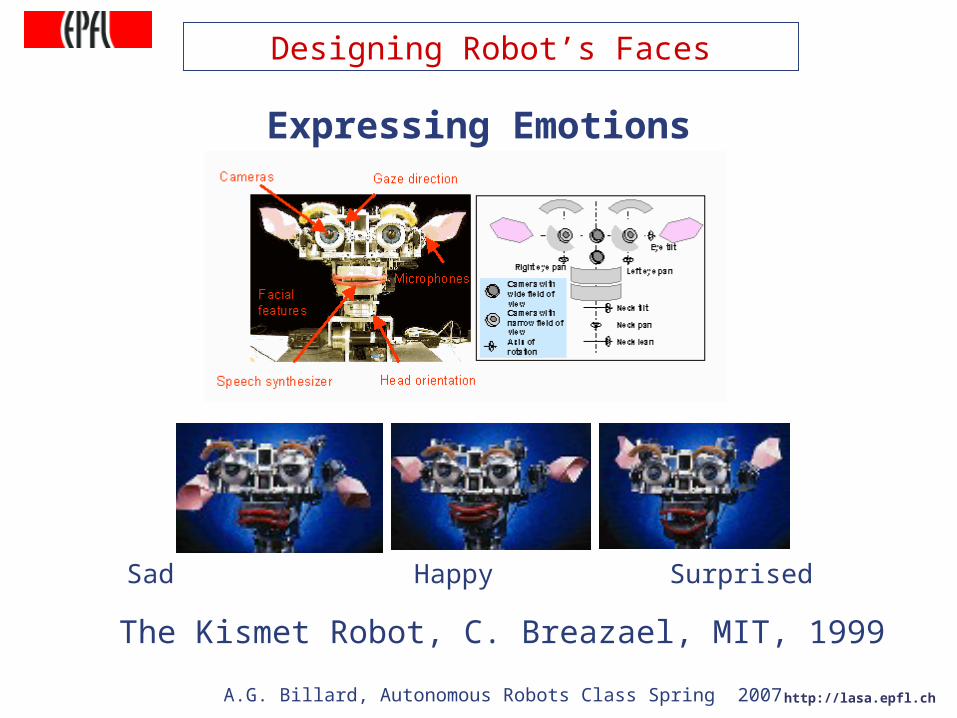
Expressing Emotions
The Kismet Robot, C. Breazael, MIT, 1999
Sad Happy Surprised
Designing Robot’s Faces

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Expressing Emotions
Feelix robot by L. Canamero, MIT, 1999
From left to right and topto bottom: neutral, anger, sadness, fear, happiness, and surprise.
Designing Robot’s Faces
L. Canamero, J Fredslund, I show you how I like you-can you read it in my face, IEEE Transactions on Systems, Man and Cybernetics, Part A,, 2001

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Designing Robot’s Faces
Mike Blow, Kerstin Dautenhahn, Andrew Appleby, Chrystopher L. Nehaniv, David Lee, The Art of Designing Robot Faces - Dimensions for Human-Robot Interaction, Proc. AMC/IEEE HRI06, Salt Lake City, Utah, USA, 2006, pp. 331 - 332.
Kaspar has 8DOF head and two 6DOF arms.
Rational behind the development of Kaspar is: • consistency of appearance and complexity between the head, body and hands to aid natural interaction• minimal expressive features to create the impression of sociability

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Aesthetic of the Face
Mike Blow, Kerstin Dautenhahn, Andrew Appleby, Chrystopher L. Nehaniv, David Lee, The Art of Designing Robot Faces - Dimensions for Human-Robot Interaction, Proc. AMC/IEEE HRI06, Salt Lake City, Utah, USA, 2006, pp. 331 - 332.

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Designing Robot’s Faces
Mike Blow, Kerstin Dautenhahn, Andrew Appleby, Chrystopher L. Nehaniv, David Lee, The Art of Designing Robot Faces - Dimensions for Human-Robot Interaction, Proc. AMC/IEEE HRI06, Salt Lake City, Utah, USA, 2006, pp. 331 - 332.
e.g. a Photograph
e.g. Comics faces
e.g. Picasso’s cubic faces

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Expressive Body Movements
Keepon (Kozima’s group, CRL, Japan): Very simple but powerful design to convey joint attention and turn taking behavior

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Keepon's kinematic mechanism. Two gimbals are connected by four wires; the lower gimbal is driven by two motors.
Another motor rotates the whole inner-structure; yet another drives the skull downward for bobbing.
Expressive Body Movements

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Attentive action Directing the head up/down and left/right so as to orient Keepon's face/body to a certain target in the environment. Keepon seems to be perceiving the target. This action includes eye-contact and joint attention. Emotive action Keeping its attention in a certain direction, Keepon rocks its body from side to side and/or bobs its body up and down. Keepon seems to express emotions (like pleasure and excitement) about the target.
Expressive Body Movements

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Robota: Educational and Therapeutic Toy
Designing Robot Toys

SDR-3X, Sony Price: Luxury car (>$100’000.-)
Robota, DIDEL SA Price: $2’800.-
My Real Baby, IRobot CorpPrice: $100.-
Robota fills a gap in the market: It is an affordable humanoid robot
Teaching toy: It provides a nice basis for child-robot interaction
Education: It has development software, you can have several robots in a class room
What is the use of Robota?

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Design Issues behind Robota
Robota’s Body:
Cuteness Human-likeness, i.e. respecting the body proportion of a young child (between 16 and 20 months old), Naturalness of the motions, i.e. the robot’s motions should be human-like.
Robota’s Capabilities:
Provided with capabilities for interactions that a child of this age would display: To recognize human faces and direct its gaze towards the user, To understand and learn a restricted vocabulary Simple imitation of the user’s motion
Designing Robot Toys

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
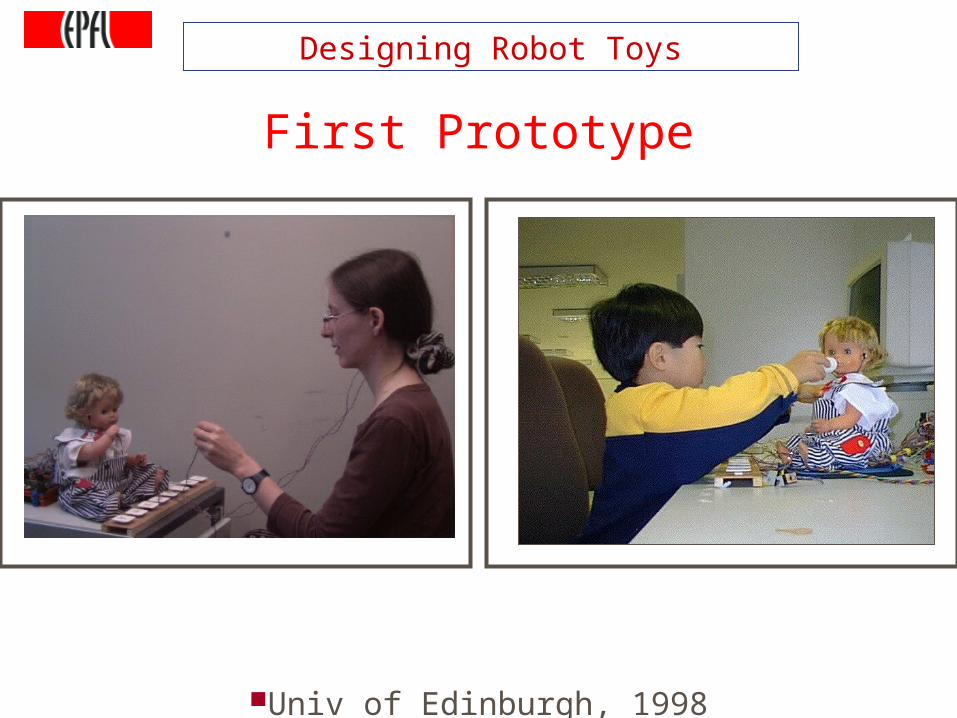
First Prototype
Univ of Edinburgh, 1998
Designing Robot Toys
A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Learning Dance Movements
Univ of Edinburgh, 1998
First Prototype
Designing Robot Toys

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
LAMI - EPFL, 1999
In collaboration with Jean-Daniel Nicoud and Andre Guignard
Second Prototype
Designing Robot Toys

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Second Prototype
Billard, A. (2003) Robota: Clever Toy and Educational Tool. Robotics & Autonomous Systems, 42, 259-269.
Designing Robot Toys

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
PDA - Pocket-PC400MHz, 64MbWindows CEEmbedded C++
Speech ProcessingCONVERSAYsynthesis + recognition
TouchSwitches
Kinesthetic – HapticPotentiometers
Face and Motion TrackingCMOS FlyCam camera
Robota – The Product
Designing Robot Toys

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Robota – The Product
Since 1999, Robota is a commercial product sold by DIDEL SA, Switzerland
Designing Robot Toys

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Three degrees of freedom:
- 1 for horizontal binocular motion
- 2 for vertical motion (separate blinking)
Aesthetic: all components within the head
ROBOTA’S EYES
Pongas, D., Guenter, F., Guignard, A. and Billard, A. (2004) Development of a Miniature Pair of Eyes With Camera for the Humanoid Robot Robota. IEEE-RAS/RSJ International Conference on Humanoid Robots.
Designing Robot Toys

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
ROBOTA’S EYES
Designing Robot Toys

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
2 USB Cameras
VGA (640X480)
15 frames per second
Robota’s eyes
IEEE Conf. In Humanoid Robotics, HUMANOIDS’04
Designing Robot Toys

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Body and Brain must Match
It is fundamental that the robot’s cognitive capabilities match its physical appearance.
• An “adult-like” humanoid robot will be expected to produce adult-like capabilities (understanding of speech and complex manipulation capabilities).
• Conversely, if one interacts with a baby-like robot, one will probably have lower expectations on the robot’s speech and manipulation capabilities.

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Designing the body and the brain of a robot
Why are the key criteria?
• The robot’s body creates expectations in terms of the robot’s capabilities.
• If these do not match, the robot loses some of its believability and of its appeal.
What are the main challenges?
To manage to endow the robot with complex facial and body expressions, while not loosing the aesthetic of the robot.
To better understand the complex and subtle effects that each of these features have on human-robot interaction.

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The importance of having human-like motions
Ishiguro’s Android driven by sinusoid-like motions
Real-time mapping of human motion on the Android

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The Kindness of the Behaviour
Ri-Man robot from Riken
A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
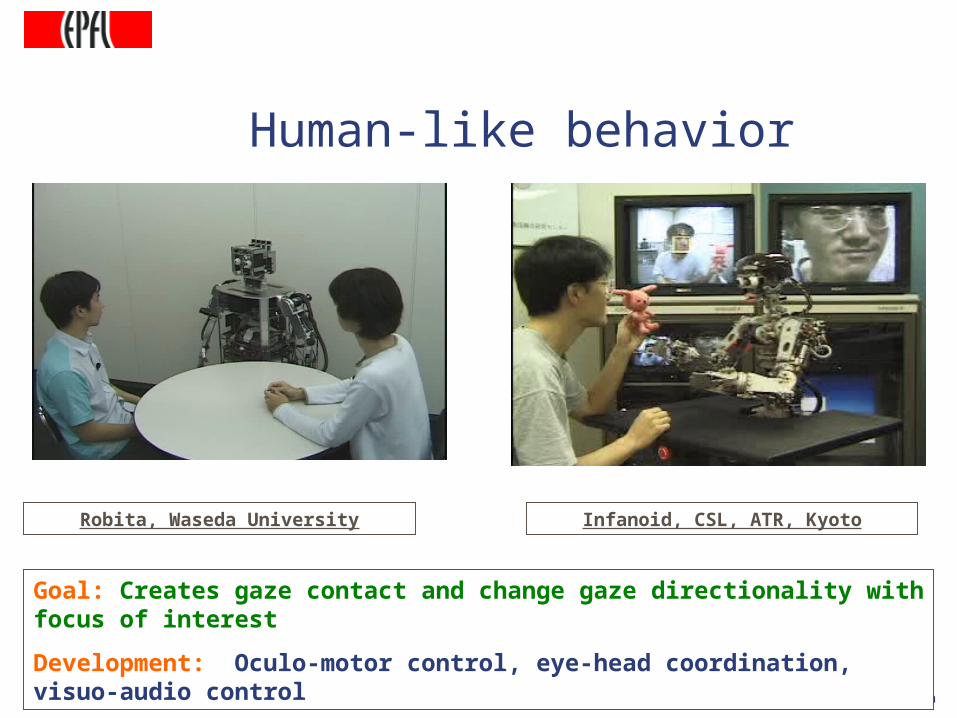
Goal: Creates gaze contact and change gaze directionality with focus of interest
Development: Oculo-motor control, eye-head coordination, visuo-audio control
Infanoid, CSL, ATR, KyotoRobita, Waseda University
Human-like behavior

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Goal: Teaching the robot through imitation
Development: From recognizing to categorizing, learning and reproducing gestures gestures
Human-like behavior
Darrin Bentivegna, ATR, Kyoto Infanoid, CSL, ATR, Kyoto

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
4 different scenarios were studied in the trials where a robot approached the subject who was located in the living room:1) Seated on a chair in the middle of an open space.2) Standing in the middle of an open space.3) Seated at a table in the middle of an open space.4) Standing with their back against a wall.
Human-like behavior
Subject seated on a chairSubject standing against a wall
Sarah Naomi Woods, Michael Leonard Walters, Kheng Lee Koay, Kerstin Dautenhahn (2006) Methodological Issues in HRI: A Comparison of Live and Video-Based Methods in Robot to Human Approach Direction Trials. Proc. The 15th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN06).

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
The main findings were: • Humans strongly did not like a direct frontal approach by a robot, especially while sitting (even at a table) or while standing with their back to a wall. • An approach from the front left or front right was preferred.• When standing in an open space a frontal approach was moreacceptable and although a rear approach was not usually mostpreferred, it was generally acceptable to subjects if physicallymore convenient.
Human-like behavior
Sarah Naomi Woods, Michael Leonard Walters, Kheng Lee Koay, Kerstin Dautenhahn (2006) Methodological Issues in HRI: A Comparison of Live and Video-Based Methods in Robot to Human Approach Direction Trials. Proc. The 15th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN06).

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
M. L. Walters, K. Dautenhahn, K. L. Koay, C. Kaouri, R. te Boekhorst, C. L. Nehaniv, I. Werry, D. Lee (2005) Close encounters: Spatial distances between people and a robot of mechanistic appearance. Proc. IEEE-RAS International Conference on Humanoid Robots (Humanoids2005), pp. 450-455.
The child groups showed a dominant response to prefer the ‘social zone’ distance, comparable to distances people adopt when talking to other humans. From the single adult studies a small majority preferred the ‘personal zone’, reserved for talking to friends. However, significant minorities deviate from this pattern.
Human-like behavior

A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
Summary
• The robot’s face must be appealing to enhance the interaction
• It must be able to express emotions to which humans can relate
• Brain and body must match the robot’s capabilities must match the expectations raised by its body features
• Simple designs can sometimes be more effective than highly complex and realistic ones
• The robot must be endowed with basic social behaviors:Joint attention, imitation, keep a desired distance.
A.G. Billard, Autonomous Robots Class Spring 2007 http://lasa.epfl.ch
CONTEST
Team of 3
Draw the most appealing robot
15 minutes