huitzoctli: a system to design control rod pattern for bwr’s using a hybrid method
TRANSCRIPT

Annals of Nuclear Energy 38 (2011) 2488–2495
Contents lists available at SciVerse ScienceDirect
Annals of Nuclear Energy
journal homepage: www.elsevier .com/locate /anucene
Huitzoctli: A system to design Control Rod Pattern for BWR’s using a hybrid method
Alejandro Castillo a,⇑, Juan José Ortiz-Servin a, Raúl Perusquía a, Luis B. Morales b
a Instituto Nacional de Investigaciones Nucleares, Carretera México-Toluca s/n, La Marquesa, Ocoyoacac, México, C.P. 52750, Mexicob Universidad Nacional Autónoma de México, Instituto de Investigaciones en Matemáticas Aplicadas y en Sistemas, Apartado Postal 70-221, México, D.F. 04510, Mexico
a r t i c l e i n f o
Article history:Received 1 March 2011Received in revised form 14 June 2011Accepted 17 June 2011Available online 24 August 2011
Keywords:BWR Control Rod PatternOptimizationScatter Search technique
0306-4549/$ - see front matter � 2011 Elsevier Ltd. Adoi:10.1016/j.anucene.2011.06.017
⇑ Corresponding author. Tel.: +52 55 53297200; faxE-mail addresses: [email protected] (A
inin.gob.mx (J.J. Ortiz-Servin), [email protected]@servidor.unam.mx (L.B. Morales).
a b s t r a c t
Huitzoctli system was developed to design Control Rod Patterns for Boiling Water Reactors (BWR). Themain idea is to obtain a Control Rod Pattern under the following considerations: (a) the critical reactorcore state is satisfied, (b) the axial power distribution must be adjusted to a target axial power distribu-tion proposal, and (c) the maximum Fraction of Critical Power Ratio (MFLCPR), the maximum Fraction ofLinear Power Density (FLPD) and the maximum Fraction of Average Planar Power Density (MPGR) mustbe fulfilled. Those parameters were obtained using the 3D CM-PRESTO code. In order to decrease theproblem complexity, Control Cell Core load strategy was implemented; in the same way, intermediateaxial positions and core eighth symmetry were took into account. In this work, the cycle length wasdivided in 12 burnup steps. The Fuel Loading Pattern is an input data and it remains without changes dur-ing the iterative process. The Huitzoctli system was developed to use the combinatorial heuristics tech-niques Scatter Search and Tabu Search. The first one was used as a global search method and the secondone as a local search method. The Control Rod Patterns obtained with the Huitzoctli system were com-pared to other Control Rod Patterns designs obtained with other optimization techniques, under the sameoperating conditions. The results show a good performance of the system. In all cases the thermal limitswere satisfied, and the axial power distribution was adjusted to the target axial power distributionalmost completely. It is very important to point out that, even though the cycle length improvementwas not the main idea of this work, the effective multiplication factor (keff) at the end of the cycle wasimproved in all cases tested. The Huitzoctli system was programmed using Fortran 77 language in anAlpha Workstation with UNIX operating system.
� 2011 Elsevier Ltd. All rights reserved.
1. Introduction
The Control Rod Pattern design to BWR has been solved usingdifferent methodologies. For instance, Lin and Lin (1991) proposedthe use of IF–THEN rules, obtaining an acceptable solution to theproblem. Karve and Turinsky (1999a) used heuristic rules andthe resulting implementation was added to the FORMOSA code(1999b). Montes et al. (2004) proposed a Genetic Algorithm, wherethe core coolant flow remains without changes throughout of thecycle. Francois et al. (2004) applies Fuzzy Logic to optimize theControl Rod Patterns in a BWR taking into account the coolantchanges into the core. Castillo et al. (2005) uses the Tabu Searchtechnique and compares the results with other similar works. Re-cently, the Ant Colony System (Ortiz and Requena, 2006), has beenproposed to achieve a good Control Rod Pattern. In all previouscases, the thermal limits and axial power profile were consideredto obtain the Control Rod Pattern design.
ll rights reserved.
: +52 55 53297301.. Castillo), juanjose.ortiz@
b.mx (R. Perusquía),
In this work, a new system is proposed, where the ScatterSearch (SS) and the Tabu Search (TS) methodologies are combined.The first technique is used as a global search technique, whereasthe second one is used to improve, in a local way, the solutions ob-tained with SS during the iterative process. The results obtainedare compared with other similar works, with the idea of analyzingthe advantages and disadvantages of our system. Huitzoctli is aword in an ancient Mexican language, whose meaning is metal rod.
2. Problem description
The Control Rod Pattern (CRP) design consists on finding axialcontrol rod positions in the different burnup steps, in which theoperation cycle is divided, to compensate all reactivity changesinto the core throughout the cycle. In this way, it is possible to ex-tract the greatest energy from the fuel, satisfying the core’s safetythroughout the operating cycle.
In this work, the reactor core considered has 444 fuel channelsand 109 control rods (Fig. 1). Axially, the control rods can be posi-tioned in 25 different locations. The positions are labelled by eveninteger numbers as following (00, 02, 04, . . . , 44, 46, 48). The first

Fig. 1. Full BWR core.
A. Castillo et al. / Annals of Nuclear Energy 38 (2011) 2488–2495 2489
10 positions, from 00 to 18, are named ‘‘deep positions’’; the posi-tions 20 to 30 are called ‘‘intermediate positions’’; finally, the posi-tions from the 32 to the 48 are named ‘‘shallow positions’’. The useof intermediate positions is forbidden due to the deformation ofthe axial power distribution shape (Almenas and Lee, 1992). Thus,there remain 19 axial different positions for each control rod. In thesame sense, if the Control Cell Core (CCC) load strategy (Specker etal., 1978) is used, only a quarter part of the control rods are consid-ered for the operating cycle. Moreover, if the 1/8 symmetry isapplied then only five control rods are finally used to design CRPs.Likewise, in a typical case, there are 12 burnup steps throughoutthe operating cycle. Thereby, the total number of possibilities todesign a CRP is ((19)5)12, which is a great number of possibilities.A scheme of the problem is shown in Fig. 2; CRi, i = 1, . . . , 5 repre-sents each control rod in the core.
CRP design must satisfy the following constraints in each bur-nup step:
(a) Reactor core must be critical.(b) Thermal limits must be satisfied.(c) The differences between a target axial power distribution
and the obtained axial power distribution must beminimized.
The thermal limits are: the maximum Fraction of Critical PowerRatio (MFLCPR), the maximum Fraction of Linear Power Density(FLPD) and the maximum Fraction of Average Planar Power Den-sity (MPGR). These parameters must be lower than 0.94.
Now, an interesting question is the following: how doesHuitzoctli determine the target axial power distribution? Haling(1964) proposed a flattened axial power distribution unchangedthroughout the operating cycle. In this way, the reactor safetycan be assured. On the other hand, when an axial power distribu-tion peaked at the bottom is used, plutonium can be produced, insuch way that the cycle length can be extended in comparison withthe Haling axial power distribution. A peaked-bottom axial power
CR1 CR2
CR3 CR4 CR2
CR5 CR3 CR1
Fig. 2. Control rod pattern scheme.
distribution can be determined by a core simulation with all con-trol rods withdrawn of the core and without burnup step. In fact,the target axial power distributions throughout the cycle willchange from a peaked form in the bottom at the beginning of thecycle, to a slightly peaked form at the top of the core towardsthe end of the cycle. This operation strategy, called spectral shift(Glasstone and Sesonske, 1994), is the best way to design theCRP, since more energy can be extracted from the fuel at the endof cycle.
3. Objective function
The design of a Control Rod Pattern must consider in each bur-nup step: (a) maintaining critical the reactor core, (b) the adjust-ment of the axial power distribution to be as close as possible toa target axial power distribution, and (c) maintaining the parame-ters MFLCPR, FLPD and MPGR within their operational limits. Thus,the objective function to be minimized is the following:
F ¼ w1jkeff ;o � keff ;tj þw2
X25
i¼1
jPoi � Ptij þw3jFLPDt � FLPDoj
þw4jMPGRt �MPGRoj þw5jMFLCPRt �MFLCPRoj ð1Þ
where keff,o is the current effective multiplication factor, keff,t the tar-get effective multiplication factor, Poi the axial power distributionfor node i, Pti the target axial power distribution for node i, FLPDt
the maximum fraction of linear lower density permitted, FLPDo
the maximum fraction of linear power density calculated, MPGRt
the maximum fraction of average planar power density permitted,MPGRo the maximum fraction of average planar power density cal-culated, MFLCPRo the maximum fraction of critical power ratio cal-culated, MFLCPRt the maximum fraction of critical power ratiopermitted, and w1, . . . , w5 are the weighting factors obtained withan statistical analysis, wi > 0, i = 1, . . . , 5.
During the optimization process, when the fractions of the ther-mal limits (FLPD, MPGR and MFLCPR) are lower than the limit val-ues (Table 1), the weighting factors are equal to zero; otherwise apenalty is added to the objective function. Thus, only the differ-ences between the target effective multiplication factor and thecalculated multiplication factor and the target axial power distri-bution and the calculated axial target distribution will be mini-mized when the thermal limits are satisfied.
4. Optimization techniques
To design CRPs, combinatorial optimization techniques calledScatter Search (SS) and Tabu Search (TS) were used. SS has beenused successfully to solve different problems in scientific and engi-neering areas. This technique was proposed in the 1980s by Glover(1989); the main idea is to use decision rules over the proposalproblem. The strategy of this technique is to improve a set of solu-tions previously built, using the best attributes of their elements.On the other hand, given that SS is a global search method, it isdesirable to modify the method to improve the performance in alocal way. The main idea of the modified method is to find the bestsolution in a neighbourhood based on a local search. To realize the
Table 1Limit values for safety parameters.
Parameter Limit value
FLPD <0.90MPGR <0.90MFLCPR <0.90

2490 A. Castillo et al. / Annals of Nuclear Energy 38 (2011) 2488–2495
local search during the iterative process, the TS (Glover, 2001)technique is used. SS technique will be explained firstly, followedby a brief explanation of the TS technique.
4.1. Scatter Search
Scatter Search is an evolutionary algorithm that operates on aset of solutions named reference set. This set is updated by combin-ing their solutions to create new ones. In SS, the main mechanismfor combining solutions is such that a new solution is created fromthe strategic combination of other solutions to explore the searchspace, while other evolutionary algorithms like genetic algorithmsrely on randomization. A detailed description of the SS methodol-ogy can be found in Laguna and Marti (2003).
Unlike a ‘‘population’’ in genetic algorithms, where the numberof elements is large, the reference set in SS tends to be small, 20elements approximately. In genetic algorithms, two solutions arerandomly chosen from the population and a ‘‘crossover’’ or combi-nation mechanism is applied to generate one or more offspring. Atypical population size in a genetic algorithm consists of 100 ele-ments, which are randomly sampled to create combinations. Incontrast, Scatter Search chooses two or more elements of the refer-ence set in a structured and intelligent way with the purpose ofcreating new solutions. Since the combination process considersat least all pairs of solutions in the reference set, there is a practicalneed for keeping the cardinality of the set small.
The Scatter Search approach can be summarized as follows:
I. Diversification Generation Method. Generate a starting set oftrial solutions to guarantee a critical level of diversity. Thesesolutions can be improved with a heuristic search method.
II. Solution Combination Method. Create new solutions consist-ing of structured combinations of subsets of the current ref-erence solutions. The structured combinations are chosenfrom highly diversified solutions to produce points, spannedby the reference solutions.
III. Improvement Method. Apply the heuristic method used instep I to improve the solutions created in step II.
IV. Reference Set Update Method. Maintain the reference set con-sisting of the b best solutions found, widespread throughoutthe solution space. Solutions gain membership to the refer-ence set according to their quality or their diversity.
SS procedure starts with the generation of a set of diverse solu-tions, which is obtained using the Diversification Generation Meth-od. This procedure creates the initial population Pob, which mustbe a wide set consisting of diverse and good solutions. The sizeof the initial population is denoted by Pobsize. An ImprovementMethod is applied to each solution obtained by the previous meth-od reaching a better solution, which is added to Pob.
A set of good representative solutions of the population is cho-sen to generate the reference set, which is called RefSet. The goodsolutions are not limited to those with the best objective functionvalues. The considered reference set consists of the union of twosubsets, RefSet1 and RefSet2, where |RefSet| = b = b1 + b2 = |Ref-Set1| + |RefSet2|. The b1 solutions with the best objective functionvalues are added to the RefSet1, which is the reference set of the‘‘high quality’’ solutions. While the RefSet2 is generated with theb2 most diverse solutions in the population. With the purpose ofevaluating the dispersion among solutions, a distance betweenthem is considered.
Once the Reference Set was generated, the next step is selectingsolutions from this set to be combined by the Solution Combina-tion Method that uses these subsets to produce new trial solutions.Then, the Improvement Method is applied to the result of the com-bination to get an improved solution. These improved solutions are
placed in a solution pool, denoted by Pool. The best b1 solutions arechosen from the union of the current RefSet1 and the set Pool to up-date RefSet1. The set RefSet2 is updated in a similar manner as theset RefSet1, but considering now the dispersion among solutions.The process is repeated a certain number of iterations while theset RefSet converges.
4.2. Tabu Search
A small survey about Tabu Search is presented in this section. Adetailed explanation of this technique can be found in Glover(2001).
Tabu Search technique is an iterative process widely known toobtain a solution that optimizes an objective function, in a givenset of feasible solutions. Tabu Search starts from a seed feasiblesolution, which can be generated in a random way. Then, the solu-tion set is explored by moving in a neighborhood from one solutionto another. During this iterative process, each feasible solution xhas an associated set of neighbors, called the neighborhood of x,NðxÞ 2 X. When N(x) is very large, it is desirable to choose, at eachiteration, a subset SN(x) � N(x) in which case, a search from thecurrent solution x to the best one x� in SN(x), is carried out. Duringthe search in SN(x), it is possible or not that f(x�) is better than f(x).The evaluation of the entire neighborhood can be very expensive interms of CPU resources. In this sense, it is possible to reduce thesize of SN taking the first move that improves the current solution.If this is not possible, then it will be necessary to examine thewhole neighborhood.
Tabu Search technique allows cycling prevention using a short-term memory, which can be an array with either fixed or variablelength. The outcome of this memory is to save certain prohibitedmovements to avoid explore already revised regions. Thus, a move-ment is forbidden during n iterations. It is very common to imple-ment a long-term memory to diversify neighbors search; theobjective of this memory is to move toward unvisited regions.
Finally, TS technique may forbid some useful moves because oftheir tabu status. In this case, when a move produces the best solu-tion of the whole process, but it was a tabu movement, it is possi-ble to cancel its tabu status and take it into account; this strategy iscalled aspiration criterion.
5. Implementation
Now, we will describe how we used both SS and TS techniquesto optimize the CRP. A feasible solution will be represented by avector (c1, c2, c3, c4, c5), where ci is the axial position of the ith con-trol rod, whose range is 2, 4, . . . , 18, 32, 34, . . . , 48, for i = 1, . . . , 5(see Fig. 2). In this case, SS uses the objective function defined inSection 3.
Our diversification method employs controlled randomizationusing frequency memory to generate the initial population Pob.The range of control rod axial positions was divided into foursub-ranges. The first one includes the positions from 00 to 08,the second sub-range includes the positions from 10 to 18, thethird sub-range has the positions from 32 to 40 and the last one in-cludes the positions from 42 to 48. Then to build a diverse solution,two stages were realized. In the first one, a sub-range is randomlyselected from the four sub-ranges. The probability of selecting asub-range is inversely proportional to its frequency count of thechosen positions. In the second stage a position is randomly gener-ated within the selected sub-range. This process is carried out asmany times as the number of diverse solutions is necessary(Pob). During the process, the frequency count to each sub-rangeis incremented and the probability to be chosen is decreased; inthis way, we generate a diverse set with Pob elements. The details

A. Castillo et al. / Annals of Nuclear Energy 38 (2011) 2488–2495 2491
of this algorithm can be seen in (Laguna and Martí, 2003). In thisimplementation the size of diverse set was Pob = 100.
Once the diverse set is generated, the next step is to obtain theReference Set. In this work the number of elements of Reference Setwas 16, given that the objective function consumes a lot of CPU re-sources. Thereby, when the optimization process has finished, oursystem can give eight good Control Rod Patterns designs, which arethe number of elements of RefSet1. The first part of that set (RefSet1)is obtained in the following way: the 100 diverse solutions areevaluated using the CM-PRESTO (Scandpower, 1993) code. Then,these solutions are evaluated using the objective function (Eq.(1)). Thus, the 8 best values are chosen to build RefSet1.
The second part of the reference set (RefSet2) is obtained in thisway:
Let ck and dm be elements of the RefSet1 and the diverse set,respectively, such that ck 2 RefSet1, k = 1, . . . , 8; dm 2 diverse set,m = 1, . . . , 100. It is possible to define ck = (c1,k, c2,k, c3,k, c4,k, c5,k)and dl = (d1,m, d2,m, d3,m, d4,m, d5,m) for each k and m, where ci,k,di,m, i = 1, . . . , 5 are the axial positions of the control rods, whichwere defined above. We can asses
Dn ¼minX5
i¼1
jci;k � di;mj; k ¼ 1; . . . ;8; m ¼ 1; . . . ;100
( )ð2Þ
Thus, we have Dn, n = 1, . . . , 100 distances. Then, the RefSet2 set isbuilt with the eight maximum distances obtained from Dn. It is very
Start
Random seed
generation
Diverse set generation
Reference set generation
A new solution is built by a combination
Reference set was improved NOT
with the combination?
YES
Fig. 3. Huitzoctli sys
easy to verify that RefSet1 \ RefSet2 = £. In fact, 8k ¼ 1; . . . ;8;
minP5
i¼1jci;k � di;mjn o
¼ 0 when ck 2 RefSet2.Summarizing, the number of elements for Reference Set is equal
to 16, 8 elements from RefSet1 and 8 elements from RefSet2
The next step of the iterative process is to combine the solutionsof the Reference Set. Let p = (p1, p2, p3, p4, p5) and q=(q1, q2, q3, q4, q5)be two elements of Reference Set, such that p 2 RefSet1 andq 2 RefSet2. Three types of combinations (x) are generated asfollows:Let
si ¼pi � qi
2
��� ���; i ¼ 1; . . . ;5 ð3Þ
thus
ti ¼ ½randð0; siÞ þ 1�; i ¼ 1; . . . ;5 ð4Þ
and
ri ¼ti þ 1 if ti is odd;ti otherwise;
�i ¼ 1; . . . ;5 ð5Þ
then
Combination 1 : x ¼ pþ r
Combination 2 : x ¼ q� r
Combination 3 : x ¼ qþ r
ð6Þ
Finally,
End
Maximum
number of iterations was satisfied ?
Reference set is updated
YE S
NOT Reference set was improved with the new solution?
Tabu search is applied using the solution
obtained by combination
tem flowchart.

Table 2Burnup step and keff target.
Burnup step Energy keff target
1 0–1000 1.00302 1000–2000 1.00003 2000–3000 0.99804 3000–4000 0.99635 4000–5000 0.99536 5000–6000 0.99537 6000–7000 0.99398 7000–8000 0.99229 8000–9000 0.991710 9000–10,000 0.991611 10,000–10,896 0.992312 10,896–10,896 0.9928
Table 3The best elements of the initial Reference Set’s obtained for example 1.
RefSet1
BS Objective function keff FLPD MPGR MFL
1 0.6239 1.0040 0.8968 0.8511 0.782 0.4427 1.0020 0.8794 0.8550 0.823 0.2201 0.9981 0.8876 0.8760 0.784 0.2868 0.9929 0.8945 0.8844 0.745 0.3268 0.9915 0.8803 0.8719 0.816 0.3940 0.9931 0.8897 0.8975 0.817 0.2922 0.9949 0.8089 0.8322 0.798 0.2876 0.9900 0.7808 0.8045 0.819 0.2224 0.9873 0.8176 0.8179 0.85
10 0.3517 0.9949 0.7920 0.8376 0.8811 0.2253 0.9914 0.8449 0.8945 0.8912 – – – – –
Table 4The best elements of the initial Reference Set’s obtained example 2.
RefSet1
BS Objective function keff FLPD MPGR MFL
1 0.7458 1.0080 0.8869 0.8454 0.822 0.4360 1.0020 0.8776 0.8424 0.813 0.2409 0.9980 0.8868 0.8931 0.774 0.2550 0.9975 0.8653 0.8539 0.775 0.3680 0.9970 0.8519 0.8260 0.776 0.3911 0.9948 0.8853 0.9081 0.797 0.3143 0.9958 0.8219 0.8456 0.808 0.2724 0.9940 0.7714 0.7879 0.819 0.3138 0.9954 0.8346 0.8307 0.86
10 0.2079 0.9924 0.8271 0.8231 0.8711 0.2893 0.9922 0.8948 0.9006 0.8912 – – – – –
Table 5The best elements of the initial Reference Set’s obtained example 3.
RefSet1
BS Objective function keff FLPD MPGR MFL
1 0.7420 0.9997 0.8911 0.8394 0.802 0.4103 1.0010 0.8966 0.8552 0.773 0.2732 1.0010 0.8761 0.8652 0.824 0.2736 0.9980 0.8656 0.8802 0.775 0.2621 0.9977 0.8722 0.8706 0.796 0.3624 0.9923 0.8613 0.8869 0.777 0.3456 0.9962 0.8059 0.8280 0.808 0.2641 0.9937 0.7624 0.7825 0.829 0.3359 0.9877 0.7717 0.7935 0.85
10 0.2088 0.9935 0.8327 0.8404 0.8811 0.1816 0.9919 0.8836 0.8945 0.8912 – – – – –
2492 A. Castillo et al. / Annals of Nuclear Energy 38 (2011) 2488–2495
xi ¼
xi ¼ 0 if xi < 0xi ¼ 18 if 18 < xi < 26xi ¼ 32 if 26 6 xi < 32xi ¼ 48 if xi > 48
8>>><>>>:
ð7Þ
For each iteration, the combination type is chosen in a random-ized way.
As already mentioned, the iterative process to solve the ControlRod Pattern design using the above combinatorial techniques con-sists of two stages. In the first one, a global search is realized withScatter Search, which was described above. Then, it is possible toimprove the SS solution using a local search method (Tabu Search).In Fig. 3, the algorithm used is shown. It is necessary to say that thealgorithm is applied to each burnup step.
RefSet2
CPR Distance keff FLPD MPGR MFLCPR
61 2848.0 0.9842 1.0780 1.0540 0.889665 3420.0 0.9919 0.9517 0.9482 0.996974 3412.0 0.9942 0.8208 0.8271 0.916657 3652.0 0.9881 0.9990 0.9840 1.007067 3040.0 0.9667 1.0010 0.9873 0.943468 3228.0 0.9882 0.8561 0.8750 0.926083 2952.0 0.9799 0.7915 0.8182 0.886661 3992.0 0.9924 0.7413 0.7714 0.944446 4416.0 0.9865 0.8329 0.8787 0.986461 3608.0 0.9751 0.9244 0.9755 1.095032 3756.0 0.9747 0.9383 0.9654 1.0090
– – – – –
RefSet2
CPR Distance keff FLPD MPGR MFLCPR
43 2500.0 1.0060 0.9860 0.9449 0.841687 3272.0 0.9784 0.9373 0.8902 0.896067 2956.0 0.9784 0.8820 0.8537 0.887309 3624.0 0.9883 0.9302 0.9380 0.993960 3404.0 0.9846 0.9464 0.9686 0.851864 2940.0 0.9924 0.8969 0.9203 0.923193 3676.0 0.9931 0.8183 0.8421 0.923579 3372.0 0.9899 0.7647 0.8047 0.981945 2844.0 0.9829 0.7948 0.8387 0.948339 3608.0 0.9822 1.0080 1.0650 1.034007 3540.0 0.9779 0.9183 0.9700 1.0340
– – – – –
RefSet2
CPR Distance keff FLPD MPGR MFLCPR
22 2652.0 0.9793 1.1830 1.0870 0.814844 3088.0 0.9832 0.8982 0.8362 0.945103 3892.0 0.9672 1.0350 0.9912 0.860492 3004.0 0.9678 1.0380 0.9600 0.877173 3048.0 0.9910 0.8098 0.8302 0.989822 2944.0 0.9943 0.8922 0.9157 0.911498 3836.0 0.9708 0.8703 0.8414 0.966603 3252.0 0.9913 0.7344 0.7620 0.919619 2888.0 0.9796 0.9261 0.9768 0.983503 3732.0 0.9827 0.9622 1.0150 1.082094 3240.0 0.9719 0.9582 0.9179 0.9345
– – – – –

k eff behaviour
0.98
0.985
0.99
0.995
1
1.005
1.01
1197531Burnup step
Effe
ctiv
e M
ultip
licat
ion
Fact
or (k
eff)
keff target Example 1 Example 2 Example 3
Fig. 4. Obtained results for effective multiplication factor.
Table 6The best Control Rod Pattern for the example 1.
CRi BSi
1 2 3 4 5 6 7 8 9 10 11 12
1 48 36 38 40 38 38 44 38 38 34 36 482 38 48 44 46 46 48 42 40 38 36 34 483 4 48 48 44 44 44 0 2 48 48 48 484 38 0 2 0 2 4 44 2 0 0 0 485 42 8 0 0 0 4 0 48 0 0 48 48
Table 7The best Control Rod Pattern for the example 2.
CRi BSi
1 2 3 4 5 6 7 8 9 10 11 12
1 42 36 38 40 38 38 42 40 38 38 46 482 40 46 48 44 46 48 42 40 38 36 34 483 36 46 44 48 46 2 44 0 48 48 36 484 0 0 2 0 2 42 2 2 0 0 0 485 46 12 6 0 0 6 0 38 0 0 34 48
Table 8The best Control Rod Pattern for the example 3.
CRi BSi
1 2 3 4 5 6 7 8 9 10 11 12
1 42 36 40 40 38 38 42 40 40 36 36 482 38 38 48 44 46 48 44 40 38 36 34 483 6 48 40 48 44 4 0 2 0 48 48 484 38 0 0 0 2 42 42 0 46 0 0 485 4 12 0 0 0 0 2 48 0 0 32 48
Table 9Global results.
Example Control rodmovements
Movements betweenshallow and deep positions
Objectivefunctionevaluations
TabuSearch
ScatterSearch
1 45 10 9473 2232 52 11 9199 2293 45 13 9920 247
Table 10The best elements of the final Reference Set’s obtained example 1 (RefSet1).
BS Objective function keff FLPD MPGR MFLCPR
1 0.5403 1.0040 0.8993 0.8596 0.77562 0.3041 1.0000 0.8986 0.8512 0.78003 0.1310 0.9978 0.8979 0.8737 0.77384 0.1071 0.9964 0.8917 0.8977 0.77605 0.1060 0.9952 0.8830 0.8953 0.78086 0.1460 0.9949 0.8820 0.8998 0.78347 0.0847 0.9939 0.8556 0.8807 0.81968 0.1621 0.9931 0.8236 0.8464 0.82669 0.1400 0.9930 0.8349 0.8311 0.8559
10 0.1311 0.9922 0.8497 0.8479 0.879111 0.1603 0.9911 0.8932 0.8949 0.887412 0.4452 0.9936 0.8507 0.9000 0.8866
Table 11The best elements of the final Reference Set’s obtained example 2 (RefSet1).
BS Objective function keff FLPD MPGR MFLCPR
1 0.5429 1.0400 0.8987 0.8639 0.83672 0.2775 1.0000 0.8998 0.8562 0.77973 0.1516 0.9980 0.8957 0.8687 0.76984 0.0980 0.9963 0.8921 0.8988 0.77595 0.1176 0.9952 0.8868 0.8962 0.77936 0.1570 0.9951 0.8809 0.8977 0.80827 0.0918 0.9936 0.8651 0.8904 0.80638 0.1668 0.9932 0.8293 0.8426 0.82709 0.1375 0.9929 0.8389 0.8301 0.8549
10 0.1314 0.9920 0.8453 0.8344 0.876711 0.1499 0.9911 0.8996 0.8928 0.886712 0.5083 0.9936 0.8524 0.8929 0.8863
A. Castillo et al. / Annals of Nuclear Energy 38 (2011) 2488–2495 2493
For each iteration, the global search with SS executes 10 inneriterations, whereas the local search (TS) is performed with 40 inneriterations. We can see that once the global search is applied, themajor effort is used in the local search. The number of inner itera-tions was fixed by a statistical analysis.
6. Results
To test Huitzoctli system performance, an equilibrium cycle ofLaguna Verde Nuclear Power Plant (LVNPP) was used. That equilib-rium cycle used two different fuel batches both with 3.66w/o ofU235 but different gadolinium concentration. In this case the keff
value is equal to 0.9928 (according to a CM-PRESTO simulation)
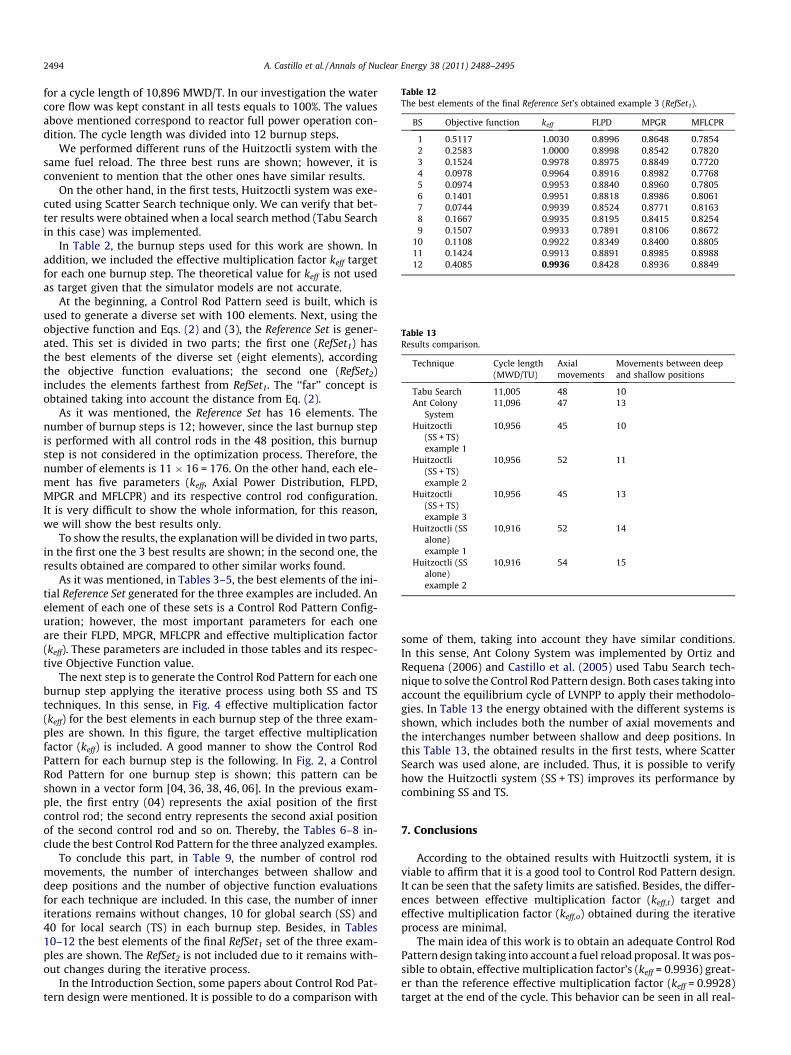
Table 13Results comparison.
Technique Cycle length(MWD/TU)
Axialmovements
Movements between deepand shallow positions
Tabu Search 11,005 48 10Ant Colony
System11,096 47 13
Huitzoctli(SS + TS)example 1
10,956 45 10
Huitzoctli(SS + TS)example 2
10,956 52 11
Huitzoctli(SS + TS)example 3
10,956 45 13
Huitzoctli (SSalone)example 1
10,916 52 14
Huitzoctli (SSalone)example 2
10,916 54 15
Table 12The best elements of the final Reference Set’s obtained example 3 (RefSet1).
BS Objective function keff FLPD MPGR MFLCPR
1 0.5117 1.0030 0.8996 0.8648 0.78542 0.2583 1.0000 0.8998 0.8542 0.78203 0.1524 0.9978 0.8975 0.8849 0.77204 0.0978 0.9964 0.8916 0.8982 0.77685 0.0974 0.9953 0.8840 0.8960 0.78056 0.1401 0.9951 0.8818 0.8986 0.80617 0.0744 0.9939 0.8524 0.8771 0.81638 0.1667 0.9935 0.8195 0.8415 0.82549 0.1507 0.9933 0.7891 0.8106 0.8672
10 0.1108 0.9922 0.8349 0.8400 0.880511 0.1424 0.9913 0.8891 0.8985 0.898812 0.4085 0.9936 0.8428 0.8936 0.8849
2494 A. Castillo et al. / Annals of Nuclear Energy 38 (2011) 2488–2495
for a cycle length of 10,896 MWD/T. In our investigation the watercore flow was kept constant in all tests equals to 100%. The valuesabove mentioned correspond to reactor full power operation con-dition. The cycle length was divided into 12 burnup steps.
We performed different runs of the Huitzoctli system with thesame fuel reload. The three best runs are shown; however, it isconvenient to mention that the other ones have similar results.
On the other hand, in the first tests, Huitzoctli system was exe-cuted using Scatter Search technique only. We can verify that bet-ter results were obtained when a local search method (Tabu Searchin this case) was implemented.
In Table 2, the burnup steps used for this work are shown. Inaddition, we included the effective multiplication factor keff targetfor each one burnup step. The theoretical value for keff is not usedas target given that the simulator models are not accurate.
At the beginning, a Control Rod Pattern seed is built, which isused to generate a diverse set with 100 elements. Next, using theobjective function and Eqs. (2) and (3), the Reference Set is gener-ated. This set is divided in two parts; the first one (RefSet1) hasthe best elements of the diverse set (eight elements), accordingthe objective function evaluations; the second one (RefSet2)includes the elements farthest from RefSet1. The ‘‘far’’ concept isobtained taking into account the distance from Eq. (2).
As it was mentioned, the Reference Set has 16 elements. Thenumber of burnup steps is 12; however, since the last burnup stepis performed with all control rods in the 48 position, this burnupstep is not considered in the optimization process. Therefore, thenumber of elements is 11 � 16 = 176. On the other hand, each ele-ment has five parameters (keff, Axial Power Distribution, FLPD,MPGR and MFLCPR) and its respective control rod configuration.It is very difficult to show the whole information, for this reason,we will show the best results only.
To show the results, the explanation will be divided in two parts,in the first one the 3 best results are shown; in the second one, theresults obtained are compared to other similar works found.
As it was mentioned, in Tables 3–5, the best elements of the ini-tial Reference Set generated for the three examples are included. Anelement of each one of these sets is a Control Rod Pattern Config-uration; however, the most important parameters for each oneare their FLPD, MPGR, MFLCPR and effective multiplication factor(keff). These parameters are included in those tables and its respec-tive Objective Function value.
The next step is to generate the Control Rod Pattern for each oneburnup step applying the iterative process using both SS and TStechniques. In this sense, in Fig. 4 effective multiplication factor(keff) for the best elements in each burnup step of the three exam-ples are shown. In this figure, the target effective multiplicationfactor (keff) is included. A good manner to show the Control RodPattern for each burnup step is the following. In Fig. 2, a ControlRod Pattern for one burnup step is shown; this pattern can beshown in a vector form [04, 36, 38, 46, 06]. In the previous exam-ple, the first entry (04) represents the axial position of the firstcontrol rod; the second entry represents the second axial positionof the second control rod and so on. Thereby, the Tables 6–8 in-clude the best Control Rod Pattern for the three analyzed examples.
To conclude this part, in Table 9, the number of control rodmovements, the number of interchanges between shallow anddeep positions and the number of objective function evaluationsfor each technique are included. In this case, the number of inneriterations remains without changes, 10 for global search (SS) and40 for local search (TS) in each burnup step. Besides, in Tables10–12 the best elements of the final RefSet1 set of the three exam-ples are shown. The RefSet2 is not included due to it remains with-out changes during the iterative process.
In the Introduction Section, some papers about Control Rod Pat-tern design were mentioned. It is possible to do a comparison with
some of them, taking into account they have similar conditions.In this sense, Ant Colony System was implemented by Ortiz andRequena (2006) and Castillo et al. (2005) used Tabu Search tech-nique to solve the Control Rod Pattern design. Both cases taking intoaccount the equilibrium cycle of LVNPP to apply their methodolo-gies. In Table 13 the energy obtained with the different systems isshown, which includes both the number of axial movements andthe interchanges number between shallow and deep positions. Inthis Table 13, the obtained results in the first tests, where ScatterSearch was used alone, are included. Thus, it is possible to verifyhow the Huitzoctli system (SS + TS) improves its performance bycombining SS and TS.
7. Conclusions
According to the obtained results with Huitzoctli system, it isviable to affirm that it is a good tool to Control Rod Pattern design.It can be seen that the safety limits are satisfied. Besides, the differ-ences between effective multiplication factor (keff,t) target andeffective multiplication factor (keff,o) obtained during the iterativeprocess are minimal.
The main idea of this work is to obtain an adequate Control RodPattern design taking into account a fuel reload proposal. It was pos-sible to obtain, effective multiplication factor’s (keff = 0.9936) great-er than the reference effective multiplication factor (keff = 0.9928)target at the end of the cycle. This behavior can be seen in all real-

A. Castillo et al. / Annals of Nuclear Energy 38 (2011) 2488–2495 2495
ized tests. Only three examples are shown, in fact, in the otherresults obtained, the keff value is equal to 0.9934 approximately.
A great advantage of this system is the following, when a runhas finished, it is possible to obtain eight Control Rod Patternconfigurations, because this is the RefSet1 set length. In all tests,the RefSet1 obtained has similar results. Only the best element ofRefSet1 has been shown.
On the other hand, the obtained results with Huitzoctli systemwere similar to the other works (Table 13), taking into account theobtained energy at the end of cycle. In the same way, the numberof realized axial movements by Huitzoctli system are similar thanthe others systems. Something like this happened with inter-changes between shallow and deep positions, which produce agood performance.
It is interesting to note that the hard work has been realized bylocal search technique (TS), while the global search technique (SS)was used to find a neighbor to realize an intensive search duringthe iterative process.
Huitzoctli system can be implemented with a fuel reload sys-tem to obtain a Control Rod Pattern and Fuel Reload in a coupledway. This is the main idea for future work.
Acknowledgement
The authors acknowledge grateful to Departamento de Gestiónde Combustible of the Comisión Federal de Electricidad of México.
References
Almenas, K., Lee, R., 1992. Nuclear Engineering: An Introduction. Springer Verlag,New York, USA.
Castillo, A., Ortiz, J., Alonso, G., Morales, L., del Valle, E., 2005. BWR control roddesign using tabu search. Annals of Nuclear Energy 32, 741–754.
Francois, J., Martín del Campo, C., Tavares, A., 2004. Development of a BWR controlrod pattern design based on fuzzy logic and knowledge. Annals of NuclearEnergy 31, 343–356.
Glasstone, S., Sesonske, A., 1994. Nuclear Reactor Engineering, Reactor SystemsEngineering. Chapman & Hall, Inc., USA.
Glover, F., 1989. Tabu search Part I. ORSA, Journal of Computing 1, 190–206.Glover, F., 2001. Tabu Search. Kluwer Academic Publishers, Boston, USA.Haling, R., 1964. Operating Strategy for Maintain an Optimum Power Distribution
Throughout Life. General Electric Company, Atomic Power EquipmentDepartment, Atomic Energy Commission, pp. 205–210.
Karve, A., Turinsky, P., 1999a. Effectiveness of BWR control rod pattern samplingcapability in the incore fuel management code Formosa-B. In: Proc. Int. Conf.Mathematics and Computation, Reactor Physics and Environmental Analysis inNuclear Applications, Madrid, Spain, vol. 2, September 27–30, pp. 1459–1473.
Karve, A., Turinsky, P., 1999b. FORMOSA-B: a boiling water reactor in-core fuelmanagement optimization package II. Nuclear Technology 131, 48–68.
Laguna, M., Martí, R., 2003. Scatter Search, Methodology and Implementations in C.Kluwer Academic Publishers, Boston, USA.
Lin, L., Lin, C., 1991. A rule-based expert system for automatic control rod patterngeneration for boiling water reactors. Nuclear Technology 95, 1–12.
Montes, J., Ortíz, J., Requena, I., Perusquía, R., 2004. Searching for full power controlrod patterns in a boiling water reactor using genetic algorithms. Annals ofNuclear Energy 31, 1939–1954.
Ortiz, J., Requena, I., 2006. Azcatl-CRP: an ant colony-based system for searching fullpower control rod patterns in BWRs. Annals of Nuclear Energy 33, 30–36.
Scandpower, A.S., 1993. User Manual CM-PRESTO 9 Version CM914B, Rev. 6, July 16.Specker, S., Fennern, L., Brown, R., Stark, K., Crowther, R., 1978. The BWR control cell
core improved design. Transactions of American Nuclear Society 30, 336–338.