humans helping robots
TRANSCRIPT

Bookkeeping
● Updated progress document due Friday○ What’s the current implementation status?
■ Can you include pictures of the current system? Screenshots?
■ Specify what remains to do as well as what’s done
○ User study should be described
○ One PDF submission per group
● (Almost) everyone has all grades; please verify them
● Consent forms○ If you did not include one in your user study design, email it to me
○ Olivia Wolfe should be Rebecca Dongarra
● Monday’s papers are up; no class Wednesday

Humans Helping Robots
Vanzo et al. 2019 Presenters: Israel Morocho, S. Ali Mohammadi
Cha & Mataric 2016 Presenters: Elijah Jensen, Guangun Song
CMSC-691 Human Robot Interaction course,Prof. Cynthia Matuszek

Who is Willing to Help Robots? ... (Vanzo et al. 2019)
• Robots in Public• Collaboration Attitude• User Studies• Method• Results• Discussion

Robots in Public
• Robots will become more common in public spaces in the future• Robots are task dependent and their bodies give many limitations to
areas outside of their tasks• These limitation will inevitably cause robots to rely on outside human
assistance• This symbiotic robotic relationship is entirely dependent on the
human’s willingness to assist the robot.• Our focus is on how a robot’s behavior can elicit a human’s willingness
to assist.

Collaboration Attitude
• The Collaborative Attitude is the measure of a person’s attitude towards a robot’s request for help within the Symbiotic Robotic framework
• We use this as a way to quantify the willingness of a human assisting a robot over a series of N + 1 tasks.
• We use a scale of 0 - 4 in which 0 signifies the lowest level of collaboration i.e. not wanting to help at all and 4 signifies the highest level i.e. the human is willing to help the robot in all tasks

User Studies• User study 1 focuses on factors that could affect collaborative attitude as
well as observing for certain values that could help maximize it.• Hypothesis 1: Proxemics Setting
• Evaluating how personal space may impact collaborative attitude and if so, at what distance (ranging from social to intimate space) would result in a higher score.
• Hypothesis 2: Gender• Physical and social characteristics may affect a human’s behavior in different
situations. Males and females have also been shown to have different reactions to similar stimuli in past HRI studies.
• Hypothesis 3: Contexts• Depending on the environment a human’s behavior may differ in different
locations specifically depending on the social interactions of the environment.
Question: Is there any other factors you believe they could have tested or switched out?

User Studies (Continue)
• User Study 2 focuses on human activity, specifically when a robot interrupts a human in order to ask for help. The study splits human activity into two categories
• Hypothesis 4 Human Activities:• Standing activity
• Refers to when a human is standing up or walking. Examples include a human walking to their next class when interrupted by a robot asking for help
• Sitting activity• Refers to when a human is sitting in an open area. Examples include a
human studying or having a lunch break.

Method
Two user studies, User Study 1 and User Study 2 were conducted on the same tools, procedure, and questionnaire but on different population, to figure out: whether Proxemics, Gender, Context and Activity factors influence the the CA.
Population: ○ 78 and 206 participants for User Study 1 and 2, respectively. ○ Randomly selected from students, 20-30 years old.○ In a between-groups design (To avoid any possible bias in the results)○ No compensation (To avoid any possible bias in the results)
Question. Do you think the number of participants for each user study is enough?
Question. why did not they compensate the participants?
Maybe, because the experiments were conducted in a crowded environment, plus they did not collect contact information of the participants to do it later. What do you think?

Method (Continue)
● Tools:○ A modified version of the Turtlebot Robot○ short-term dialogues
■ Automatic Speech Recognizer Module (ASR)■ a Dialogue Manager (DM)
(To manage the dialogic interaction)
● Procedure: In a Wizard-of-Oz fashion○ Approach○ Dialogue○ Questionnaire○ Homing

Method (Continue)
● Questionnaire Question. What do you think about the number of questions?

Results

Results (User study1)
• With a Personal distance, the CA is maximized.• Females may be more inclined to help robots than male. (Gender)• The CA is rather stable when different contexts are tested.•

Results (User study 2)
• The CA is rather stable when different Activity are tested.

Discussion
● The results and statistical tests (One-way ANOVA, Levene’s test, Welch’s test, t-Test) show that:○ Proxemics and Gender have a strong influence on the CA.○ However, there are not statistically significant differences when changing the
operational Context and Activity.
Any comments or questions so far?

Essay 2
Using Nonverbal Signals To Request Help During
Human-Robot Collaboration
Cha & Mataric 2016
Essay 2 - Elizabeth Cha et al.
Non-verbal Signals:
• Robots are able to interact in a number of ways and as they work in human-environments they need to communicate effectively
• The most common methods found are auditory and visual cue to request help
• To determine what participants most effectively react to and prefer to respond to

Introduction
• Human-robot Collaboration ( HRC )• Robot need:
• Understand the intention
• Capture the action
• Feedback in time
• Joint actions:
• Shared goal, Effective coordination, perceptual, cognitive, motor processes
• Challenge:
• Correctly interpreting the actions
• Effectively communicate mental state
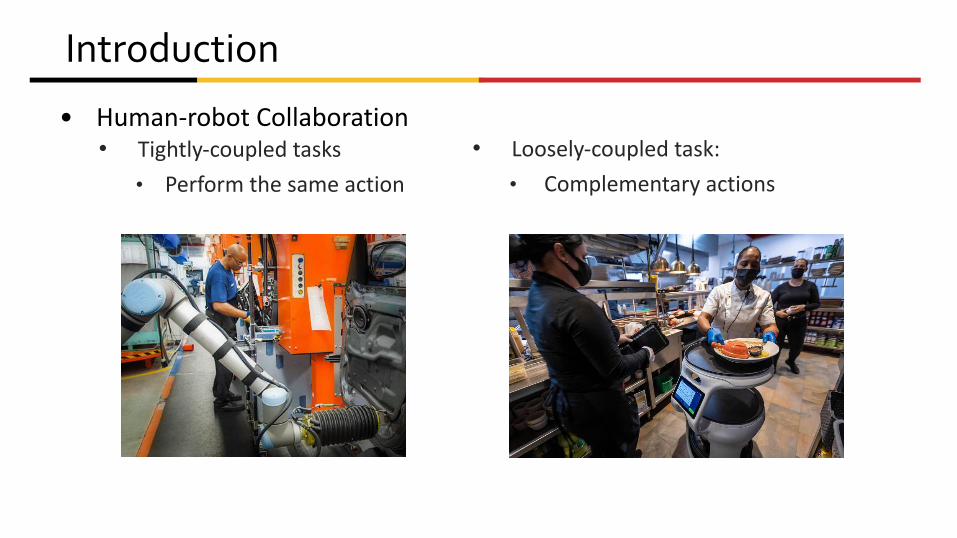
Introduction
• Human-robot Collaboration • Tightly-coupled tasks
• Perform the same action
• Loosely-coupled task:
• Complementary actions

Introduction
• Robot seek help from its human collaborator• Drawbacks:
• Lack of most robots: appearance, modalities, capabilities
• Bad influence on humans: distract attention, reduce efficiency
• Proposed issue• How non-humanoid robots utilize nonverbal communication signals to request
help in a collaborative task setting?
• Balance the need?
• Factor: urgency, availability, annoyance
• Evaluation?

Background
• Collaboration• Humans:
• Verbal and nonverbal cues
• Many signals are unintentional• Robots:
• Specified task or goal
• Fluid collaborations need?
• Humans: understand robot’s state
• Robots: accurately convey mental state

Background
• Communicating Mental Status• Human observers infer a robot’s goal from its motion• Limitations for robots:
• Parallel ability
• Environment
• Lack channels about affective state
• Signals:
• Audio cues? Visual cues? Haptics?
• Which one or more is more effective?

Background
• Requesting Assistance• Assistance from humans is critical to the robot’s success• The collaborative context is unique:
• Provide a clear, polite request
• Three stages of asking for help:
• Get the responder’s attention
• Alert the responder
• Put forth the request

Hypotheses
H1. Non-verbal signal design: Non-humanoid robots can effectively use light/sound to create nonverbal help requests for different levels of urgency
H2. Objective Request: The request scenario significantly affects the time it takes a human to react
H3. Subjective request: The human's perception of the help interaction is affected by the request scenario

Experimental Design
Participants were tasked with co-working with a robot in a serving environment.
Participant Tasks:
• Receives orders from the robot• The user enters these orders into a
system• Periodically responds to robot’s help
requests

Experimental Design
The Robot’s Taks:• Maneuvers throughout the rooms• Retrieves meal orders for the user• Periodically requests the user’s
help
Signals: Varied Frequencies• Light: Shades of red• Audio: binary sound with 3 levels
of pitch and frequency
iRobot Ava platform

Results
Audio Signals Light Signals

ResultsH1. All participants noticed the different signals used to communicate.
• 26.67% noticed the difference between low and medium urgency• 16.67% based urgency off of sound• 23.3% based it of of both
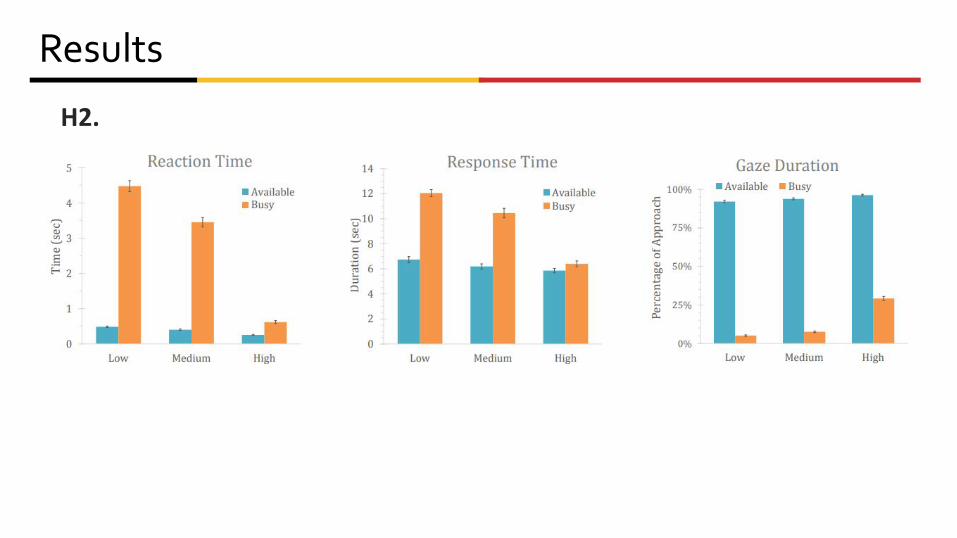
H2.• Participants constantly gazed at the robot when available• Participants rarely gazed at the robot when busy
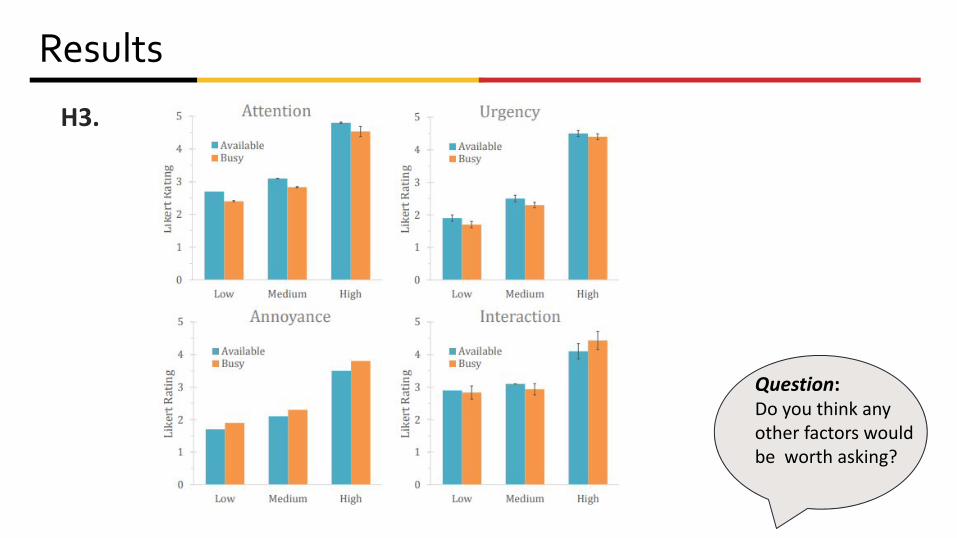
H3.• Availability and request urgency significantly affected user attention• Users commented on wanting a less obtrusive low urgency signal• Users commented on the high urgency signals causing them to
”react immediately”
Results
H2.
Results
H3.
Question:Do you think any other factors would be worth asking?

Discussion
• Will the type of help signal affect people's willingness to help?
• What determines the tolerance for help signals?
• If you encounter a robot asking for help in your life, are you willing to help?
• What is the motivation to help the robot?
• What type of signals would you find less obtrusive?
• What signals do you think are most effective for help requests?

Journal comments
• Concerns on Consent and Compensation
• Does Gender have an impact on Collaborative attitude
• Better implementation of Standing and Sitting activities.
• Usres were not aware of being involved in the studies until the
questionnaire phase started. What are the possible reasons?