hybrid manipulation: force-vision cmput 610 martin jagersand
Post on 19-Dec-2015
226 views
TRANSCRIPT
Hybrid Manipulation: Force-Vision
CMPUT 610
Martin Jagersand
Today:
How to incorporate other sensory feedback.
Focus on tasks where the number of contact constraints increase during manipulations.
Acquire necessary constraint geometry on-line.
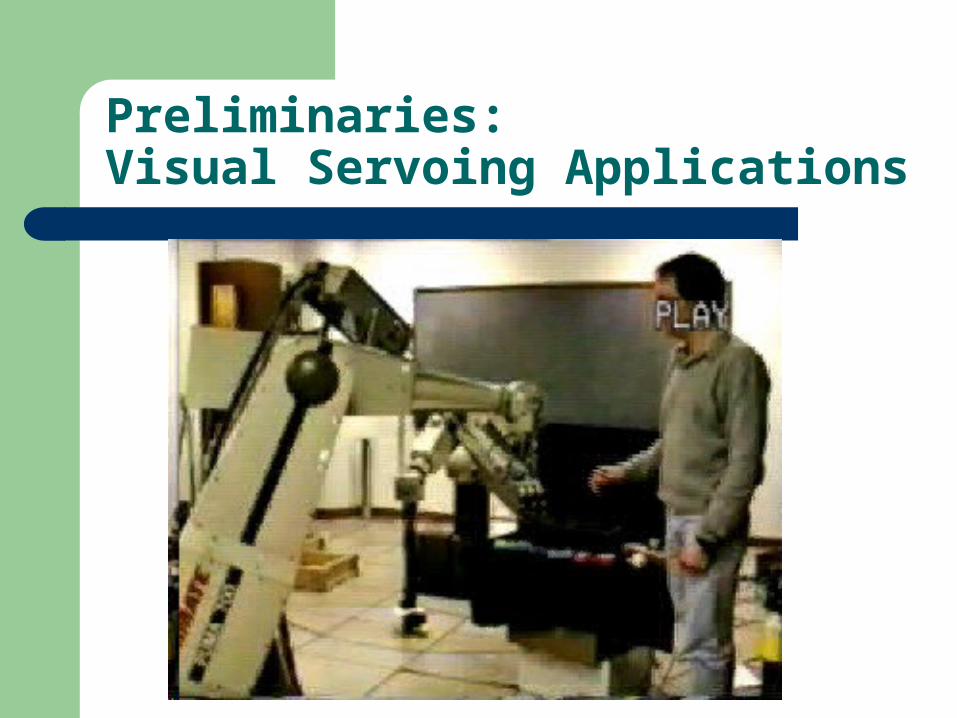
Preliminaries:Visual Servoing Applications

Limitations of Visual Control
Accuracy is limited by: Visual tracking and Visual goal specification
(Jagersand et. al. ICRA 97)
Specifying well defined visual encodings can be difficult (Hager, Hespana, Dodds, Jagersand)
Limited to non-occluded settings Not all tasks lend themselves to visual
specification.
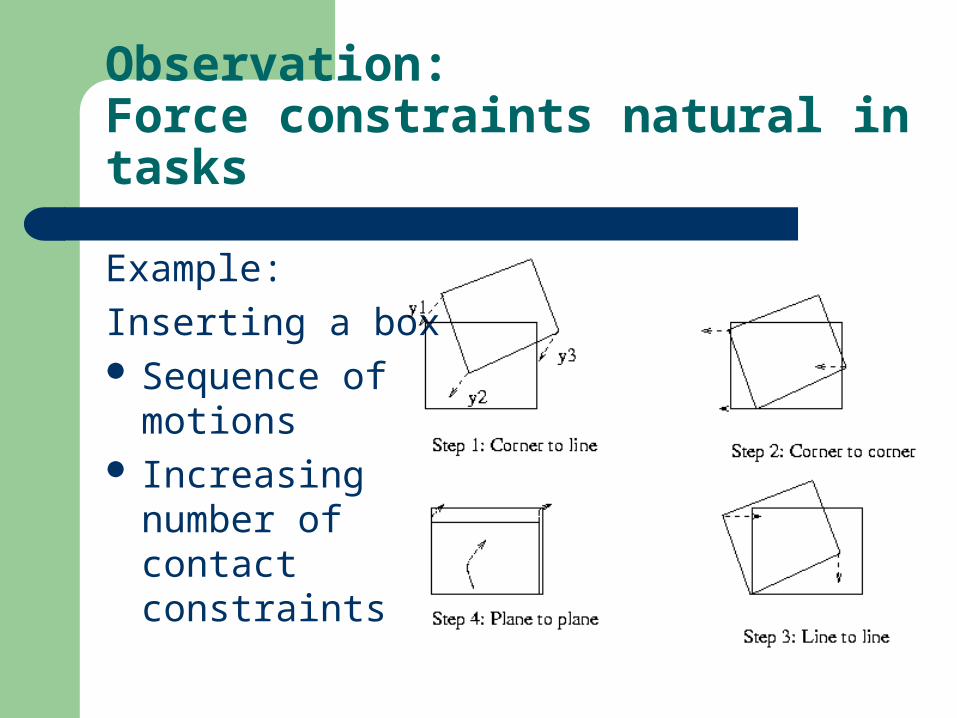
Observation:Force constraints natural in tasks
Example:
Inserting a box Sequence of
motions Increasing number
of contact constraints
Preliminaries: Uncalibrated Visual Servoing
Let y = visual observation; x = motor control Linear system model:
y= Linear p-controller
Estimate the Visual-Motor Jacobian
Jêk+1 = Jêk+ É xTÉ x
(É ymeasuredà JêkÉ x)É xT
f (x) ù f (xk) + J (xk)(x à xk)
xç = K J +kyç
What do we need to add to do things like this?
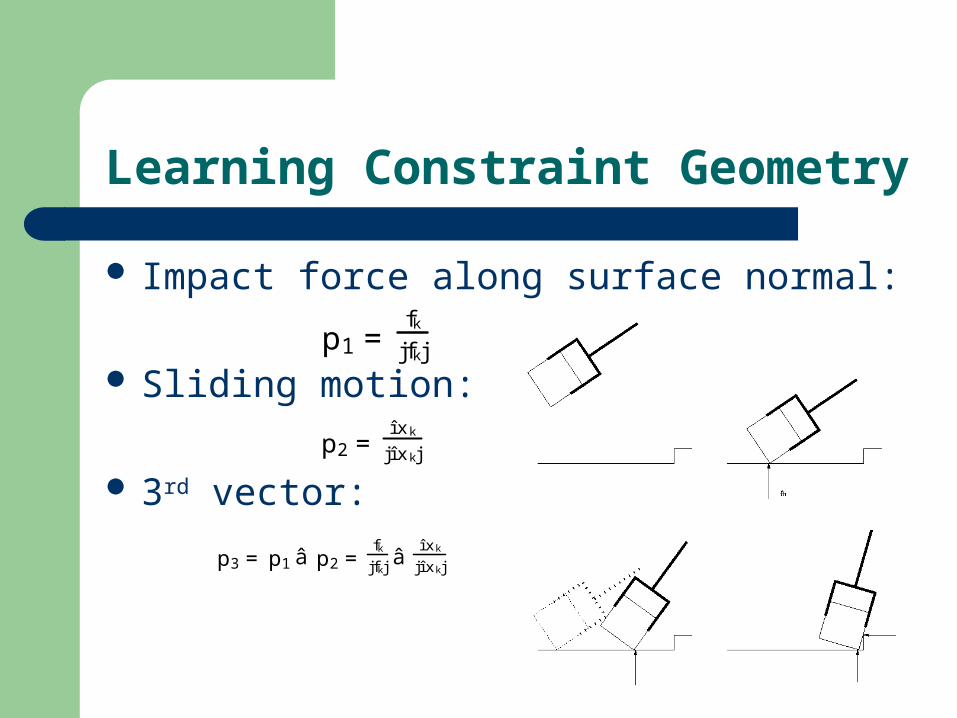
Learning Constraint Geometry
Impact force along surface normal:
Sliding motion:
3rd vector:
p1 = jfkjfk
p2 = jî xkjî xk
p3 = p1â p2 = jfkjfk â
jî xkjî xk

Constraint Frame
With force frame = tool frame we get:
Assume frictionless => Can update each time step
Pk+1 =p1p2p3
0
@
1
A =
jfkjfk
jî xkjî xk
jfkjfk â
jî xkjî xk
0
BBB@
1
CCCA
P1
P2
P3

Hybrid Control Law
Let Q Joint -> Tool Jacobian Let S be a switching matrix, e.g. diag([0,1,1]) Velocity control u:
uk = à K vQà1Pà1kSPkQJ à1ek à K cQà1Pà1
k(I à S)Pkfk
Visual part Force part

Accounting for Friction
Friction force is along motion direction! Subtract out to recover surface normal:
Pk+1 =
jfkàpT
2fkp2j
fkàpT
2fkp2
jî xkjî xk
jfkàpT
2fkp2j
fkàpT
2fkp2
âjî xkjî xk
0
BBBBBB@
1
CCCCCCA

Final Hybrid Controller Structure
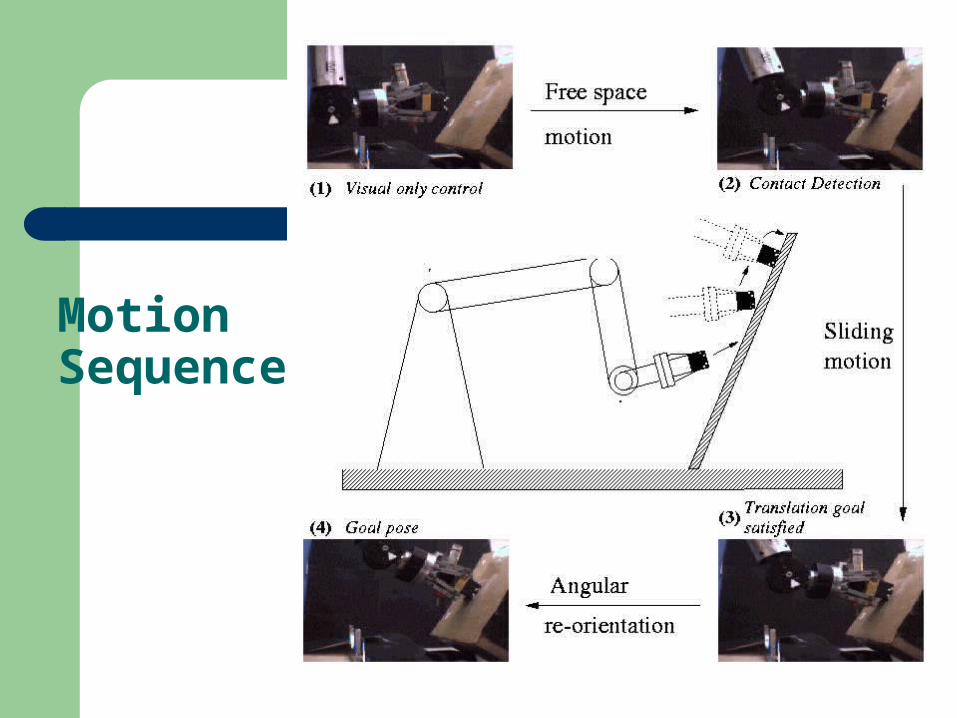
Motion Sequence

Switching of Constraints inHybrid Force-Vision Feedback

Sliding along a Curved Surface
In principle any smooth surface can be followed
Detail of measured forceEstimated surface normals

Estimation Accuracy
The constraint coordinate frame was acquired within a few degrees of the true surface frame

Conclusions
Hybrid Force-Vision control allow more accurate positioning than vision or force alone
Many tasks naturally involve an increasing number of contact constraints
We showed that the contact geometry can be successfully estimated
Combined Uncalibrated Vision & Force control