ice manual rev2.1 150315 ita - ksb.com · le successive indicazioni forniscono i limiti applicativi...
TRANSCRIPT

Service Manual ICE Drive
ICE Drive
Manuale d’uso
Rev 2.1

ICE Drive Service Manual
2

ICE Drive Service Manual
3
PREFAZIONE: Grazie per aver scelto il drive serie I C E ad alte prestazioni di REEL. La serie I C E è costruita adottando componenti e materiali di alta qualità e incorporando le più recenti tecnologie a microprocessori disponibili.
Questo manuale è necessario nell'installazione, nell'impostazione dei parametri, nella ricerca guasti, e nella manutenzione quotidiana dell'azionamento I C E. Per garantire un funzionamento sicuro dell'equipaggiamento, leggere le seguenti linee guida per la sicurezza prima di collegare la tensione all' I C E. Tenere questo manuale di istruzioni a portata di mano e distribuirlo a tutti gli utilizzatori come riferimento.
ATTENZIONE:
- Leggere sempre questo manuale accuratamente prima di usare i drive della serie ICE.
- La tensione AC di ingresso deve essere sempre tolta prima di ogni manutenzione. Non connettere o disconnettere cavi e connettori mentre al circuito c'è applicata della tensione. La manutenzione deve essere eseguita da tecnici qualificati
- Sui circuiti stampati ci sono componenti MOS molto sensibili. Questi componenti sono particolarmente sensibili all'elettricità statica. Per evitare danneggiamenti non toccarli sui circuiti stampati con oggetti metallici tenuti a mani nude
- Anche dopo lo spegnimento possono restare sui condensatori del DC-link delle tensioni pericolose. Per evitare danni personali, prego assicurarsi che la tensione sia stata tolta prima di operare sull' I C E e attendere cinque minuti per far scaricare i condensatori fino ad un livello di sicurezza.
- Mettere a terra l’ I C E usando il morsetto di terra. Il metodo di messa a terra deve essere conforme con le leggi dello stato dove verrà installato l'AC drive. Riferirsi allo schema dei collegamenti di base.
- Il dissipatore può scaldare anche oltre 70°C (158°F) durante il funzionamento. Non toccare il dissipatore!

ICE Drive Service Manual
4
INDICE: 1 RICEZIONE E SPEDIZIONE .................................................................................................................... 6
1.1 SIGLA E TARGA D’IDENTIFICAZIONE .......................................................................................... 6 1.2 SPECIFICHE GENERALI................................................................................................................. 6 1.3 TABELLA TAGLIE STANDARD ....................................................................................................... 7 1.4 GRADO DI PROTEZIONE ............................................................................................................... 7 1.5 CARATTERISTICHE GENERALI .................................................................................................... 8
2 STOCCAGGIO E INSTALLAZIONE ........................ ................................................................................ 9
2.1 STOCCAGGIO ................................................................................................................................. 9 2.2 CONDIZIONI AMBIENTALI E DECLASSAMENTI ........................................................................... 9 2.3 INSTALLAZIONE ............................................................................................................................. 9
3 PESI E DIMENSIONI .............................................................................................................................. 11
3.1 SMALTIMENTO ............................................................................................................................. 11
4 COLLEGAMENTI ...................................... ............................................................................................. 12
4.1 CONNESSIONE DI POTENZA ...................................................................................................... 12 4.2 I/O DI POTENZA ............................................................................................................................ 14 4.3 COLLEGAMENTI DI POTENZA (INGRESSO LINEA – USCITA MOTORE) ................................ 15 4.4 CONNESSIONE DEL MOTORE .................................................................................................... 16 4.5 ACCESSO AI COLLEGAMENTI DI POTENZA: ............................................................................ 17 4.6 CONNESSIONE DEI SEGNALI ..................................................................................................... 17 4.7 I/O CARATTERISTICHE ................................................................................................................ 19 4.8 I/O “INGRESSI /USCITE” ............................................................................................................... 20 4.9 I/O DI SEGNALE ............................................................................................................................ 20 4.10 MESSA A TERRA: ......................................................................................................................... 21 4.11 TENSIONE PICCO PICCO IN USCITA ......................................................................................... 22 4.12 MASSIMA LUNGHEZZA CAVI PER COLLEGAMENTO MOTORE. ............................................. 22
5 PROGRAMMAZIONE ICE ................................ ...................................................................................... 24
5.1 INSTALLAZIONE DRIVER E SW DI COMUNICAZIONE .............................................................. 24 5.2 VISUALIZZAZIONE E PARAMETRIZZAZIONE CON APPLICATIVO XICE ................................. 24 5.3 AGGIORNAMENTI ......................................................................................................................... 28 5.4 STRUMENTI ICE .......................................................................................................................... 32 5.5 INFORMAZIONE DELLE VERSIONI SW INSTALLATE IN ICE .................................................... 34
6 PARAMETRIZZAZIONE ICE ............................. ..................................................................................... 35
6.1 ELENCO PARAMETRI DI CONTROLLO ...................................................................................... 35 6.2 MOTOR .......................................................................................................................................... 36 6.3 RUN ................................................................................................................................................ 37 6.4 V/F CURVE .................................................................................................................................... 38 6.5 DRIVE............................................................................................................................................. 39 6.6 I/O ................................................................................................................................................... 41 6.7 P.I.D. ............................................................................................................................................... 42 6.8 CONTROL ...................................................................................................................................... 43 6.9 COMMUNICATION ........................................................................................................................ 43
7 DESCRIZIONE PARAMETRI ............................. .................................................................................... 44
7.1 MOTOR .......................................................................................................................................... 44 7.2 RUN ................................................................................................................................................ 45 7.3 V/F CURVE PARAMETERS .......................................................................................................... 46 7.4 DRIVE............................................................................................................................................. 47 7.5 PARAMETRI I/O ............................................................................................................................. 52 7.6 PARAMETRI PID ........................................................................................................................... 56 7.7 PARAMETRI CONTROL ................................................................................................................ 56 7.8 PARAMETRI COMMUNICATION .................................................................................................. 57
8 MAPPA DI MEMORIA ICE .............................. ....................................................................................... 58
8.1 MAPPA DI MEMORIA .................................................................................................................... 58

ICE Drive Service Manual
5
8.2 AREA PARAMETRI ........................................................................................................................ 58 8.3 OUTPUT REGISTERS ................................................................................................................... 62 8.4 INPUT REGISTERS ....................................................................................................................... 63 8.5 OUTPUT DISCRETES ................................................................................................................... 64
9 ALLARMI ........................................... ..................................................................................................... 65
9.1 ALLARMI ........................................................................................................................................ 65 9.2 DESCRIZIONE ALLARMI E AZIONI DA INTRAPRENDERE IN ATTIVITÀ DI SERVICE ............ 66
10 OPZIONI ................................................................................................................................................. 70
10.1 SCHEDA RELAY + PTC (SCHEDA OPT 5998.X) ......................................................................... 70 10.2 SPECIFICHE E COLLEGAMENTO SCHEDA OPT 5998.X .......................................................... 71
11 STORICO DEL DOCUMENTO ............................................................................................................... 73

ICE Drive Service Manual
6
11 RRIICCEEZZIIOONNEE EE SSPPEEDDIIZZIIOONNEE
L' I C E ha superato rigorose prove e controlli di qualità in fabbrica prima della spedizione. Dopo la ricezione, controllare i seguenti punti:
- Assicurarsi che l'imballo contenga l' I C E ed il manuale,
- Verificare che l'unità e l’imballaggio del prodotto non abbia subito danni durante il trasporto.
- Assicurarsi che il numero di modello indicato sulla targhetta corrisponda a quello dell'ordine.
1.1 SIGLA E TARGA D’IDENTIFICAZIONE
I C E risponde alla seguente codifica:
1. Nome del drive
2. Tensione aliment. (Volt AC) Frequenza d’ingresso (Hz)
3. Tensione di uscita (V) Frequenza d’uscita (Hz)
4. Corrente nominale/massima (Arms)
5. Numero di serie 6. Taglia del drive
1.2 SPECIFICHE GENERALI
Di seguito sono riportati i dati comuni a tutte le taglie:
- Tensione d’ingresso: min. 380 Vac -15%; max. 460Vac +10%,
- Frequenza d’ingresso: 45 ÷ 65 Hz,
- Cosϕ (in ingresso): migliore di 0,98,
- η (eta): 98,5% con FPWM = 2,5KHz,
- Frequenza d’uscita: 0 ÷ 1000 Hz,
- Tensione d’uscita: 97% della tensione d’ingresso,
- Corrente d’uscita: vedere Inom/Imax nella tabella taglie.

ICE Drive Service Manual
7
1.3 TABELLA TAGLIE STANDARD
La tabella taglie sotto indicata è stata compilata secondo la costruzione standard del drive ICE in relazione a PWM 2,5 e 4 KHz e sovraccarico 1,2 volte circa la Inom con I2t pari a 10 secondi. Come anticipato dallo stesso nome del drive (“customize”),il prodotto ICE permette anche la possibilità di personalizzare la taglia attraverso l’estensione applicata alla size software (size 7.**) Ad esempio “.1 ” indica sovraccarico standard con I2t impostato a 10 secondi.
1.4 GRADO DI PROTEZIONE
I C E è fornito nel grado di protezione IP00. Il prodotto deve essere montato e installato all’interno di un apposito contenitore o armadio elettrico che quindi gli attribuisce il grado di protezione. Lo spazio interno di questo armadio elettrico deve garantire una distanza minima dal perimetro del drive di almeno 10 cm oltre a mantenere una temperatura max interna di 55°C. In prodotto ICE è già munito nel lato DC apposito filtro induttivo per la riduzione dell’emissione di disturbi. Resta a cura dell’installatore provvedere ad eventuale installazione di filtro di ingresso per linea AC.
Model Size SW
Pnom (KW)
Pmax (KW)
Inom (A)
Imax* (A)
Losses (Watt) ++ 2.5 KHz 4 KHz
1 7.1 7.5 9 13 16 115 125 2 8.1 10 12,5 16 20 160 170 3 9.1 18 22 30 36 270 300 4 10.1 35 42 55 66 510 560 5 11.1 55 65 90 108 700 800 6 12.1 65 80 105 126 790 910 6 13.1 70 100 120 170 980 1060 7 14.1 85 100 145 170 1170 1350 7 15.1 100 150 170 240 1420 1550 8 16.1 120 150 200 240 1570 1800 8 17.1 150 200 250 350 2140 2340 9 18.1 170 200 285 350 2350 2700
10 19.1 210 260 370 460 2750 3120 10 20.1 260 350 480 650 3840 4450 11 21.1 300 350 560 650 4470 5160
* Max overload for 10 seconds ++ Air-cooled version

ICE Drive Service Manual
8
1.5 CARATTERISTICHE GENERALI
Sistema di controllo SVC (Space Vector Control), SSP (Sensorless Space Position),
SSP- IPM (con magneti)
Tipo di frequenza PWM 2.5, 4, 8 KHz, PWM Random (8 KHz disponibile solo su alcune taglie),
Controllo di frequenza 0-999Hz (risoluzione 0.1Hz)
Rampe di acc./dec. 0 a 999,9 sec. Trapezoidale
Valore di sovraccarico Vedi tabella taglie
Declassamento per PWM Nessun declassamento per PWM a 2,5 e 4 KHz
Ingressi analogici di
controllo 0/10V, 4/20mA, risoluzione 12bit
Comandi configurabili
Input 5 ingressi digitali a 18-24Vcc
Uscite digitali configurabili 2 contatti di relé NO 1A -110Vac AC1
Controllo PID Su anello di velocità e corrente
Uscita ausiliaria
configurabile
Analogica 0÷±10V / frequenza 0÷100Hz, Risoluzione 8 bit + segno.
Protetta in corrente
Protezioni del drive
Protezione termica motore (I²t),
Sottotensione (<410V DC bus)
Sovratensione (>820V DC bus)
Protezione termica convertitore con visualizzazione della temperatura Igbt.
Corto circuito franco tra le fasi e verso terra
Protezione elettronica della resistenza di frenatura
Porta seriale di serie USB-B protocollo ModBus
Porta seriale opzionale RS-485 protocollo ModBus
Grado di protezione IP 00

ICE Drive Service Manual
9
22 SSTTOOCCCCAAGGGGIIOO EE IINNSSTTAALLLLAAZZIIOONNEE
2.1 STOCCAGGIO
Prima dell'installazione, I C E deve essere conservato nel proprio cartone di spedizione. Per far valere la copertura in garanzia, deve essere immagazzinato e stoccato in modo appropriato (vedi paragrafo 2.2 successivo).
2.2 CONDIZIONI AMBIENTALI E DECLASSAMENTI
Le successive indicazioni forniscono i limiti applicativi e descrivono il corretto modo di operare con I C E, sia all’installazione sia durante i test preliminari.
Altitudine: Tutti i dati sono riferiti a 1000 m. s.l.m.
Umidità: In operazione: 5%-85% RH (funzioni mantenute fino a 90% RH), classe 3K3 In stoccaggio: 5%-95% RH, classe 1K3 Durante il trasporto: <95% RH a 40°C, classe 2K3
Declassamento: -4% della corrente efficace per ogni grado di temperatura superiore a 40°C, -1% della corrente efficace per ogni 100 mt. Superiori ai 1000 mt. s.l.m.
Alimentazione: Trifase: min.380 V-15%; max. 460V+10%
Ventilazione:
Di norma non abbisogna di ventilazione aggiuntiva, essendo questa parte integrante del drive (quando necessaria). È buona norma in ogni caso posizionare il drive lontano da fonti di calore. Nell’installazione predisporre almeno 100 mm d’aria nei dintorni del drive per non ostruire il corretto flusso d’aria.
Stoccaggio: Temperatura min.= -10°C; max.= +70°C. Garantire un luogo asciutto e pulito. Garantire l’assenza di condensazione.
2.3 INSTALLAZIONE
Proteggere il sistema da ambienti aggressivi quali:
- contenuto di polveri; - atmosfera satura di olio o agenti corrosivi; - polveri volatili di grosse dimensioni, capaci di ostruire (anche parzialmente) i condotti di ventilazione; - agenti chimici od organici che formando deposito superficiale possono compromettere gli isolamenti
interni; - presenza di vapori gassosi; - deposito di materiale anche poco conduttivo che può alterare i parametri di lavoro dei circuiti ad alta
impedenza; - ambienti caldo umidi che favoriscono la condensa di acqua sulle parti raffreddate; - ambienti marini;

ICE Drive Service Manual
10
NOTA! Nell’installazione in armadi condizionati, togliere l’alimentazione ed attendere la normalizzazione termica prima dell’apertura delle ante dell’armadio e della re-alimentazione per evitare condensazioni.. NOTA! Evitare che, il flusso d’aria fredda del sistema refrigerante, investa direttamente lo chassis del drive NOTA! L’umidità si condensa sui punti ad elevato salto termico negativo; qualora un flusso d’aria fredda investa direttamente il drive, nelle schede interne si può indurre condensazione, compromettendo il regolare funzionamento. Maneggiare l’apparecchio in modo tale da non danneggiare alcuna sua parte. Effettuare sempre i collegamenti di terra (PE), utilizzando l’apposito morsetto di terra o l’apposita sbarra di terra. Proteggere l’apparecchio da sollecitazioni non consentite (temperature elevate, umidità condensante, colpi, etc...).

ICE Drive Service Manual
11
33 PPEESSII EE DDIIMMEENNSSIIOONNII L’ ICE viene progettato secondo le esigenze del Cliente, pertanto le dimensioni di ingombro dipendono dall’alloggiamento entro il quale il Cliente lo monterà. Anche il peso è dipendente dalle richieste. Una componente importante per la quantificazione del peso è dovuta al sistema di raffreddamento che può essere ad aria forzata, a liquido refrigerato o a gas criogenico.
3.1 SMALTIMENTO
L’ ICE deve essere considerato “rifiuto speciale” poiché alcune parti interne sono ad alto contenuto tossico. Il drive può in ogni modo essere smantellato, allo scopo di recuperare le parti riciclabili che sono:
- radiatore in alluminio, - induttanze integrate con avvolgimenti in rame, - cavi in rame di collegamento interno
Le schede elettroniche, i componenti di potenza, i condensatori e la componentistica elettronica sono da considerarsi rifiuto speciale.

12
44 CCOOLLLLEEGGAAMMEENNTTII PERICOLO! Tensione pericolosa! Prima di accedere l’
- Disconnettere tutte le alimentazioni all'- Attendere 5 minuti per la scarica completa dei
PERICOLO! L' I C E può distruggersi senza possibilità di riparazione se vengono collegati cavi sbagliati ai morsetti di ingresso/uscita. Non collegare mai i morsetti di uscita dell'dell'alimentazione principale AC Ogni modifica elettrica e meccanica a questa apparecchiatura senza previo consenso scritto di REEL S.r.l. rende nulla la garanzia e potrà risultare un pericolo per la sicurezza..
4.1 CONNESSIONE DI POTEN
ICE Drive Service Manual
Tensione pericolosa! Prima di accedere l’ I C E: Disconnettere tutte le alimentazioni all' I C E. Attendere 5 minuti per la scarica completa dei condensatori del bus DC.
può distruggersi senza possibilità di riparazione se vengono collegati cavi sbagliati ai morsetti di ingresso/uscita. Non collegare mai i morsetti di uscita dell' I C E U, V, e W direttamente al circuito
Ogni modifica elettrica e meccanica a questa apparecchiatura senza previo consenso scritto di REEL S.r.l. rende nulla la garanzia e potrà risultare un pericolo per la sicurezza.
CONNESSIONE DI POTENZA
W V U
L3 L2 L1
ICE Drive Service Manual
può distruggersi senza possibilità di riparazione se vengono collegati cavi sbagliati ai U, V, e W direttamente al circuito
Ogni modifica elettrica e meccanica a questa apparecchiatura senza previo consenso scritto di REEL S.r.l.
Ingresso AC
Uscita
W

ICE Drive Service Manual
13
Motor Main Voltage
Le strategie di progettazione applicate all’ingresso linea sopprimono la maggior parte delle perturbazioni che possono arrivare dall’esterno: la reattanza ed il filtro RFI integrati riducono il contenuto armonico della corrente assorbita dai drive e li disaccoppiano dagli altri apparati connessi alla stessa linea, i condensatori integrati proteggono da spikes veloci, i varistori d’ingresso bloccano eventuali sovratensione di bassa potenza. Solo per reti critiche con problematiche particolari può essere necessaria a protezione del convertitore. l’applicazione di soppressori di sovratensione esterni. Alcuni esempi sono:
- linee elettriche potenzialmente perturbabili dalla presenza di fulmini - la presenza di grosse saldatrici in linea - impianti di rifasamento sprovvisti di reattanze di disaccoppiamento o mal funzionanti.
In questi casi si consiglia la presenza di appositi soppressori di sovratensioni.

ICE Drive Service Manual
14
4.2 I/O DI POTENZA
L’ I C E è protetto da sistemi elettronici in grado di riconoscere le anomalie circuitali causate da possibili cortocircuiti esterni. L'utilizzo di cavi per collegamento con lunghezza superiore alla massima ammessa può indurre l’intervento di questa protezione, poiché tutti i cavi presentano una capacità parassita fra i vari conduttori, dovuta alla stesura parallela di questi ed alla vicinanza allo schermo.
La capacità può essere così schematizzata in fase-fase e fase-terra :
Capacità fase fase:
Capacità fase terra:
Le capacità parassite (Cp1 + Cp2), se d’elevata entità, possono portare al blocco del drive per eccessiva corrente di commutazione.
Il costruttore del cavo fornisce una Scheda tecnica riportante l’entità della capacità parassita per ogni metro di lunghezza.
NOTA! Non applicare in nessun caso una capacità parassita maggiore di 5nF. Qualora sia necessario l’uso di cavi lunghi occorre attuare almeno una delle seguenti accortezze:
- inserire in uscita un filtro limitatore del dV/dt. - inserire una reattanza d’uscita tra motore e I C E nelle immediate vicinanze di quest’ultimo.

ICE Drive Service Manual
15
I cavi multipolari schermati, quando connessi a morsettiera o connettore non predisposti per ricevere lo schermo, devono essere fissati preferibilmente con collare nel punto più vicino a quello di collegamento elettrico:
4.3 COLLEGAMENTI DI POTENZA (INGRESSO LINEA – USCIT A MOTORE)
La protezione del ponte di ingresso contro il sovraccarico o improvvisi picchi di corrente, dovuti soprattutto ad eventuali sbalzi di linea, deve essere effettuata inserendo a monte reattanze di disaccoppiamento e fusibili ultrarapidi opportunamente dimensionati in funzione della corrente nominale del I C E.
Soprattutto su installazioni in aree soggette a frequenti sbalzi di linea (in prossimità di grosse centrali di generazione o su impianti con tratti di linea particolarmente lunghi o ancora, in aree disagiate), va particolarmente curato il dimensionamento della reattanza.
Fusibili ultrarapidi:
Sono richiesti fusibili ultrarapidi a protezione del ponte raddrizzatore interno che vanno dimensionati di corrente I2t inferiore a quella del diodo installato.
NOTA!: Il valore di taglia del fusibile va dimensionato in funzione della corrente nominale del drive.
Questo valore è da considerarsi solamente un limite superiore, è però indispensabile non superare l’I2T riportato in tabella per le taglie attuali.
Size catalog
Size SW
Pnom (KW)
Pmax (KW)
Inom (A)
Imax* (A)
I2t diodo
1 7.1 7.5 9 13 16 / 2 8.1 10 12,5 16 20 / 3 9.1 18 22 30 36 / 4 10.1 35 42 55 66 / 5 11.1 55 65 90 108 / 6 12.1 65 80 105 126 / 6 13.1 70 100 120 170 125 kA2S 7 14.1 85 100 145 170 125 kA2S 7 15.1 100 150 170 240 125 kA2S 8 16.1 120 150 200 240 125 kA2S 8 17.1 150 200 250 350 340 kA2S 9 18.1 170 200 285 350 340 kA2S 10 19.1 210 260 370 460 500 KA2S 10 20.1 260 350 480 650 806 kA2S 11 21.1 300 350 560 650 806 kA2S
* max overload permitted 10 seconds ++ Air-cooled version

ICE Drive Service Manual
16
Reattanza di disaccoppiamento:
Il drive integra una reattanza sul DC Link di piccola entità, utile soprattutto per la compatibilità elettromagnetica.
In caso di reti particolarmente critiche (forti sbalzi o buchi), per proteggere il drive da sovracorrenti, è richiesta una reattanza di disaccoppiamento dalla rete. Va dimensionata in funzione della corrente nominale in ingresso.
Una semplice formula risolve in modo approssimato ma efficace il dimensionamento; il risultato è espresso in millihenry [mH]:
mH
- La formula di cui sopra prevede una caduta di tensione ai capi della reattanza del 1,5 – 2% alla corrente nominale.
- La corrente nominale della reattanza dovrà essere uguale a quella prevista per l’ingresso di linea maggiorata del 15%; la corrente di saturazione consigliata è di 3 * Inom
- Situazioni particolari di rete perturbata o con variazioni repentine di tensione richiedono valori di reattanza anche doppia.
4.4 CONNESSIONE DEL MOTORE
Nella scelta dei cavi di collegamento occorre considerare numerose variabili, distinte secondo la tipologia del collegamento da effettuarsi.
I cavi non devono essere installati a contatto o in prossimità di superfici calde, salvo che non siano costruiti a tale scopo.
Per apparecchiature mobili o trasportabili usare cavi flessibili o flessibilissimi.
I cavi devono essere utilizzati rispettando le condizioni limite d’impiego per il quale sono stati prodotti e garantiti (tensione nominale, portata di corrente, temperatura d’esercizio, effetti termici).
I tratti impiegati come collegamento terminale ad apparecchiatura fissa, devono essere i più corti possibili e collegati alle parti fisse dell’impianto in modo appropriato.
NOTA! Le successive informazioni hanno lo scopo di fornire le indicazioni necessarie ad ottimizzare, da parte dell’installatore, il dimensionamento e l’esecuzione dei collegamenti elettrici.
- I cavi di potenza, sia d’alimentazione da rete sia di collegamento motore, devono essere
opportunamente dimensionati rispetto alla sezione necessaria per la corrente nominale .
- Interporre a monte dell’alimentazione una terna di fusibili dimensionati in funzione della corrente nominale del drive.
- Predisporre cavi schermati per i collegamenti di segnale, con sezione minima del conduttore di 0,5mm2.
- Eseguire il collegamento di terra minimizzando la lunghezza dei conduttori; Per l’installazione in armadi elettrici si consiglia l’adozione di barre di terra differenziate fra potenza e segnali
- Il contattore di linea deve essere scelto in tabella AC1 sovradimensionato del 15% rispetto alla corrente del motore in uso.
- Non interporre nessun contattore fra il motore ed il convertitore.
- Il convertitore deve essere collegato ad una messa a terra regolamentare.

Terminal board for the connection PTC motor (pin 5 and 6)
- Tutti i dispositivi (relè, elettrovalvole, contattori), montati all’interno del quadro contenente il convertitore o alimentati da sorgenti comuni, devono essere dotati di gruppi RC o di diodi di ricircolo se l’alimentazione è in corrente continua.
4.5 ACCESSO AI COLLEGAMENTI DI P
L’ I C E è progettato in esecuzione IP00 quindi l’accesso ai collegamentfunzione dell’involucro che il cliente realizza.
4.6 CONNESSIONE DEI SEGN
L’accesso ai connettori dei segnali è facilitevidenziato in figura. I collegamenti dell’elettrovalvola sono anch’essi disponibili nelle vicinanze della scheda di regolazione
La scheda switching inoltre, oltre alla gestione dei pilotaggi a fibra, fornisce la possibilità di collegare 30 KOhm. La gestione di questa sequenza è affidata a una serie di parametri parametri. - PTC Threshold : soglia di allarme espressa in OHM - PTC Limit : valore limite per la segnalazione di allarme ed eventuale riduzione della velocità- PTC Limit H : limite inferiore per isteresi
ICE Drive
Terminal board for the connection to
i dispositivi (relè, elettrovalvole, contattori), montati all’interno del quadro contenente il convertitore o alimentati da sorgenti comuni, devono essere dotati di gruppi RC o di diodi di ricircolo se l’alimentazione è in corrente continua.
AI COLLEGAMENTI DI P OTENZA:
è progettato in esecuzione IP00 quindi l’accesso ai collegamenti di potenza e di segnale efunzione dell’involucro che il cliente realizza.
CONNESSIONE DEI SEGNALI
è facilitato dalla posizione dei morsetti della scheda di regolazione
I collegamenti dell’elettrovalvola sono anch’essi disponibili nelle vicinanze della scheda di regolazione
La scheda switching inoltre, oltre alla gestione dei pilotaggi a fibra, fornisce la possibilità di collegare 30
La gestione di questa sequenza è affidata a una serie di parametri descritti sia di seguito e sia nel capitolo
soglia di allarme espressa in OHM valore limite per la segnalazione di allarme ed eventuale riduzione della velocità
limite inferiore per isteresi sul valore di limite PTC
Signals terminal boardregulation board
ICE Drive Service Manual
17
i dispositivi (relè, elettrovalvole, contattori), montati all’interno del quadro contenente il convertitore o alimentati da sorgenti comuni, devono essere dotati di gruppi RC o di diodi di ricircolo
i di potenza e di segnale e in
i morsetti della scheda di regolazione, come
I collegamenti dell’elettrovalvola sono anch’essi disponibili nelle vicinanze della scheda di regolazione
La scheda switching inoltre, oltre alla gestione dei pilotaggi a fibra, fornisce la possibilità di collegare 30
descritti sia di seguito e sia nel capitolo
valore limite per la segnalazione di allarme ed eventuale riduzione della velocità
Signals terminal board of the

ICE Drive Service Manual
18
Viene sotto riportata ingrandimento della morsettiera con le connessioni disponibili, provviste di apposito connettore estraibile:
Terminal board for the signal connections of the regulation board

ICE Drive Service Manual
19
4.7 I/O CARATTERISTICHE
Morsetti Connettore Descrizione Caratteristiche tecniche
P7
- U
SB
4 – GND P7 Ground di segnale
Porta di comunicazione USB 3 – I/O1 P7 Input/output data
2 – I/O2 P7 Input/output data 1 - +5USB P7 +5V di segnale Shield P7
Inpu
t/Out
put
20 - +24V P6 +24Vdc
Uscita +24Vdc, 100mA max 19 - +24V P6 +24Vdc 18 - GND P6 0V-GND 17 - GND P6 0V-GND 16 - +10V P6 +10Vdc
Uscita +10Vdc, 10 mA max 15 - AGND P6 0V-AGND 14 - AIN2 P6 Ingresso analogico 2 +10Vdc impedenza 40kΩ
0-20mA impedenza 500Ω
13 - AIN1 P6 Ingresso analogico 1 12 - AGND P6 0V-AGND 11 - AOUT P6 Uscita analogica 0-10 V +/-100mV 10 - -C P6 0V Comune degli ingressi digitali 9 - DIN5 P6 Ingresso digitale 5
Attivazione da 18 a 24 Vdc 8 - DIN4 P6 Ingresso digitale 4 7 - +24V P6 +24Vdc Uscita +24Vdc, 100mA max 6 - +C P6 Comune uscita digitale 5 - DOUT P6 Uscita digitale protetta 0-24V 4 - TERRA P6 Morsetto di terra 3 - -485 P6 Segnale +Rs485 Porta RS 485 per
comunicazione alternativa 2 - +485 P6 Segnale -Rs485 1 - 0485 P6 Zero Rs485
Inpu
t/Out
put
7 - -485 P5 Segnale Rs -485 Porta RS 485 per comunicazione alternativa 6 - +485 P5 Segnale Rs -485
5 - 0485 P5 Zero Rs485 4 - GND P5 0V-GND 3 - DIN3 P5 Ingresso digitale 3
Attivazione da 18 a 24 Vdc 2 - DIN2 P5 Ingresso digitale 2
1 - DIN1 P5 Ingresso digitale 1
Relè Output 2
4 - COM2 P4 Contatto Relè DO2 1A 110Vac AC1
3 - NO2 P4 Comune Contatto Relè DO2
Relè Output 1
2 - COM1 P4 Contatto Relè DO1 1A 110Vac AC1. * Vedi nota sotto 1 - NO1 P4 Comune Contatto Relè DO1
NOTA! * Relè Output 1 può essere utilizzato per comando elettrovalvola di raffreddamento. (La gestione del Relè garantisce 100.000 cicli nei limiti elettrici dichiarati, per utilizzi superiori è necessario utilizzare l’apposita OPT 59 98.X, Vedi Capitolo 10)

ICE Drive Service Manual
20
4.8 I/O “INGRESSI /USCITE”
Le connessioni delle I/O (input/output) sono le più sensibili in quanto non possono essere particolarmente filtrate per ottenere una elevata velocità di controllo e sono sensibili alla tipologia di cablaggio e al carico applicato.
4.9 I/O DI SEGNALE
I test effettuati nel nostro laboratorio dimostrano una sensibilità sporadica solo ad eventi perturbanti generati entro pochi cm dalla CPU dell’ I C E.
Occorre prestare attenzione quindi a non generare scariche elettrostatiche d’intensità importante in prossimità dei convertitori o su conduttori che li coinvolgano direttamente.
Test di laboratorio hanno dimostrato insensibilità alle scariche elettrostatiche sul radiatore metallico fino a 10.000V.
È richiesta l’installazione di diodi di ricircolo sui relè pilotati in DC e gruppi RC su relè/teleruttori pilotati in AC negli armadi elettrici che contengono e/o condividono le alimentazioni con I C E.
Per ridurre le emissioni irradiate, è sempre consigliata l’installazione di ferriti in tutti i cavi che s’interfacciano con il convertitore.
È in ogni modo buona norma prevedere cavi schermati il cui shield relativo sia collegato a terra: tipicamente la messa a terra avviene con collarino fissato nella carpenteria del drive.

ICE Drive Service Manual
21
4.10 MESSA A TERRA:
È fondamentale che l’I C E sia propriamente connesso a terra. Il sistema di connessione “stellato” è l’ottimale.
La figura seguente evidenzia la tipologia di collegamento da effettuarsi.
I C E
I C E
I C E
I C E
I C E
I C E
a) collegamento corretto b) collegamento errato
OK NO
NOTA! Porre inoltre particolare attenzione alle successive indicazioni:
- Le connessioni di terra alle barre devono essere minimizzate.
- Per aumentare l’immunità ai disturbi è importante avere un'estesa superficie di contatto delle varie connessioni di terra.
- Qualora si installi il drive in un quadro elettrico, è opportuno prevedere due barre di terra separate, di dimensioni e sezione adeguate, cui connettere tutte le terre di potenza e quelle di segnale; le barre devono poi essere connesse all'impianto di terra in un solo punto. Collegare il quadro elettrico al sistema di terra della rete d’alimentazione.
Sulla barra di potenza collegare:
- le terre dei motori, - le carcasse dei drive, - le schermature dei cavi di potenza, ect...
Sulla barra di segnale collegare:
- gli schermi dei segnali analogici (riferimenti, uscita per tachimetri, amperometri, ect...), - le schermature dei vari feedback (encoder, resolver, dinamo tachimetrica, ect...), - gli schermi delle seriali del sistema, se i relativi dispositivi non prevedono uno specifico ingresso
dello schermo.
Le barre di segnale non devono essere interessate da correnti provenienti dai circuiti di potenza, essendo fonti di possibili disturbi provenienti dal sistema di regolazione (PWM, di/dt elevati, ect...) o di sistemi di connessione (spazzole, contatti struscianti, ect…).

ICE Drive Service Manual
22
4.11 TENSIONE PICCO PICCO IN USCITA
La moderna tecnologia di costruzione degli azionamenti, con switching ad IGBT, ha portato ad una rapida evoluzione dei sistemi di movimentazione industriali, permettendo prestazioni meccanico-elettriche sempre più spinte. L’IGBT (finale di potenza del drive), commuta la tensione DC interna al drive per ricostruire la sinusoide di corrente al motore (vedere “Technology inverter’s structure”), nei modi più ottimali per le prestazioni dello stesso. L’IGBT essendo caratterizzato da un’elevata velocità di commutazione, può essere causa d’emissioni elettromagnetiche (vedere “Compatibilità Elettromagnetica”) o di sovra- tensioni al motore (vedere “Filtri d’uscita: Riduzione degli spikes di tensione”). NOTA! La velocità di commutazione degli IGBT interni a I C E è di circa 4000 V/µS. NOTA! La tensione commutata è pari a 2 * DC_link (quest’ultimo dipende dalla tensione alternata d’alimentazione aumentata di un fattore 1.41), poiché è ricostruita sia la semionda positiva sia quella negativa). PERICOLO! Cavi con capacità parassita elevata possono anche duplicare la tensione commutata al motore NOTA! La giusta applicazione di I C E garantisce la rispondenza ai limiti normativi di compatibilità elettromagnetica. È da ricordare che singoli risultati ottenuti nei drive non sono decisivi ma d’aiuto, poiché l’intero sistema deve essere sottoposto a direttive e a marcatura CE.
4.12 MASSIMA LUNGHEZZA CAVI PER COLLEGAMENTO MOTORE .
La lunghezza massima dei cavi motore applicabili ai drive va distinta secondo l’applicazione. Occorre considerare due distinti fattori applicativi:
- Applicazione di un sistema come PDS (Power Drive System) indipendente. - Applicazione di un sistema come BDM (Basic Drive Module) da installare come componente di
in sistema più complesso. - L’applicazione di un PDS deve rispondere direttamente alle normati ve EMI (vedere
Compatibilità elettromagnetica ).
Distinguendo le diverse classi risulta:
Fino a 7,5kW “Classe B” 5m di lunghezza massima con capacità parassita (Cs) non superiore a 5nF (vedere 4.2 I/O di potenza)
Oltre 7,5kW “Classe A1” 50m di lunghezza massima con capacità (Cs) parassita non superiore a 5nF (vedere 4.2 I/O di potenza)
- Per l’ applicazione del prodotto come BDM (Basic Drive Module) il prodotto ICE è da installare come componente di un sistema più complesso, dove solo l’intero sistema è certificato a cura dell’assemblatore il quale, supportato dalla documentazione dei vari componenti, appone la marchiatura CE all’intera macchina.
La capacità in questo caso è da considerarsi solo la capacità parassita (Cs):
Capacità parassita inferiore a 5nF

ICE Drive Service Manual
23
Qualora, per esigenze d’installazione, la lunghezza dei cavi motore è tale per cui la capacità parassita eccede la massima ammessa, è necessario interporre tra motore e drive un filtro limitatore del dV/dt, atto a ridurre l’effetto capacitivo dei cavi e quindi l’eccessiva dispersione di corrente.

ICE Drive Service Manual
24
55 PPRROOGGRRAAMMMMAAZZIIOONNEE IICCEE
5.1 INSTALLAZIONE DRIVER E SW DI COMUNICAZIONE
La visualizzazione, gestione e la modifica dei parametri tramite supervisore dedicato di prodotto XICE risulta facile grazie alla interfaccia grafica di Windows. La comunicazione avviene tramite connessione USB tipo B (vedi foto sotto riportata). Quindi, per una corretto interfacciamento, bisogna installare il driver per tale porta attraverso le semplici operazioni indicate dal PC:
Se l’installazione avviene con successo apparirà la seguente indicazione:
5.2 VISUALIZZAZIONE E PARAMETRIZZAZIONE CON APPLICA TIVO XICE
Il passo successivo è l’installazione del SW di comunicazione XICE tra PC e I C E.

ICE Drive Service Manual
25
Dal CD allegato al prodotto o dalla cartella con i SW adeguati, attraverso il file di installazione precompilato “XICE set_up” sarà possibile effettuare l’installazione nel proprio PC come una qualsiasi periferica di sistema. A questo punto si può estrapolare dalla lista programmi il file eseguibile XICE per lanciare l’applicazione finale direttamente dall’icona predisposta. L’icona che comparirà sul monitor sarà la seguente:
Una volta installato, cliccando sull’icona il programma si apre visualizzando la schermata iniziale:
Il programma XIce , in caso di up-grade, può essere aggiornato tramite i file contenuti nella cartella di aggiornamento tipicamente denominata “XIce_upgrade”. I fili di aggiornamento vanno copiati nella cartella di destinazione del programma XIce (vedere capitolo 5.3) Dal menù è possibile visualizzare ogni parametro di controllo impostato nel drive modificandone a piacere il valore. I parametri sono descritti ed elencati in ordine nel capitolo 6: PARAMETRIZZAZIONE ICE La struttura del supervisore XICE prevede:
- Una schermata di “status” del drive ricavabile dal menu a tendina “supervision” “Ice monitor” attraverso la quale si possono dare i comandi di marcia (START, STOP, RESET), variare il

ICE Drive Service Manual
26
riferimento nonchè visualizzare gli allarmi e lo stato dell’ I C E (velocità, corrente, frequenza, tensione motore, temperatura IGBT, ingressi e uscite digitali attivate etc etc)
- Una schermata “parameters” ricavabile dal menù a tendina “configuration” → “parameters” attraverso la quale si accede a tutta una serie di gruppi parametri dedicati alla configurazione del sistema.
La schermata parameters permette di salvare e caricare eventuali file di parametri attraverso le voci evidenziate di “load from file ” e “save to file ” : le sequenze da fare sono ben indicate dalle varie finestre di aiuto di XIce compresa la richiesta di conferma nel’operazione di caricamento file eventualmente richiesto. Il file generato o caricato avrà l’estensione adeguata del prodotto “.ice” . In caso di configurazione come SSP il supervisore XIce aggiunge nella schermata principale un’altra voce possibile indicata nella figura sotto e denominata “Download SSP Table”

ICE Drive Service Manual
27
La funzione “Download SSP Table” serve a caricare la tabella di caratterizzazione specifica in caso di utilizzo di motore SSP ottenuta tramite Xssp configuration: essendo questa tipologia di motore un vettoriale sensorless ad elevate prestazioni il caricamento di questa tabella (file con estensione .out), associato allo specifico file di parametrizzazione, ne permette un più facile e immediato controllo.
Le operazioni da seguire per il caricamento della tabella sono guidate dallo stesso XIce nelle varie fasi di programmazione:in ogni caso il supervisore darà segnalazione dell’avvenuta e corretta programmazione del file indicando con allarmi specifici eventuali incongruenze (vedere listato allarmi paragrafo 9 specifico) Il prodotto ICE inoltre prevede la possibilità di monitorare in una unica finestra di DEBUG, le grandezze analogiche dell’ I C E nonché status e sequenza di eventuale User Program in esecuzione. La finestra appare come da immagine sotto riportata. Per accedere a questa finestra scegliere menù “supervision” → “debug cyclic input”.

ICE Drive Service Manual
28
5.3 AGGIORNAMENTI
Il prodotto ICE prevede la possibilità di effettuare on line vari aggiornamenti firmware, nella fattispecie gli aggiornamenti possono essere:
- Aggiornamento firmware di ICE - Aggiornamento supervisore XIce - Aggiornamento/caricamento User program di ICE
In tutti gli aggiornamenti le varie finestre previste che compariranno saranno di aiuto all’operatore nelle varie esecuzioni. Aggiornamento firmware di ICE La sequenza per aggiornamento firmware di ICE è: Menù → tools → download firmware → richiesta di selezione del file specifico → ricerca del file specifico → caricamento del file specifico → conversione e poi conferma del download. Tutti i passaggi sopra citati sono sotto riportati nella grafica specifica di XIce.

ICE Drive Service Manual
29
La programmazione corretta si conclude con la schermata di cui sopra: in caso di fallita programmazione compariranno dei codici specifici di motivazione.
Aggiornamento supervisore di XIce Quando il supervisore XIce è già stato installato una prima volta, l’aggiornamento viene effettuato tramite i file contenuti in una cartella tipicamente denominata “XIce_upgrade ”. Questi file devono essere copiati nella cartella di destinazione del programma XIce La sequenza per aggiornamento del supervisore XICE è: Posizionarsi su icona XIce → tasto destro del mouse del PC → proprietà → trova destinazione → copiare in quest’area tutti i file della cartella XIce_upgrade → confermare Chiudere e riaprire XIce verificandone la versione installata tramite il menù a tendina “? → About XIce ”

ICE Drive Service Manual
30
Tutti i passaggi sopra citati sono sotto riportati nella grafica specifica di XIce.

ICE Drive Service Manual
31
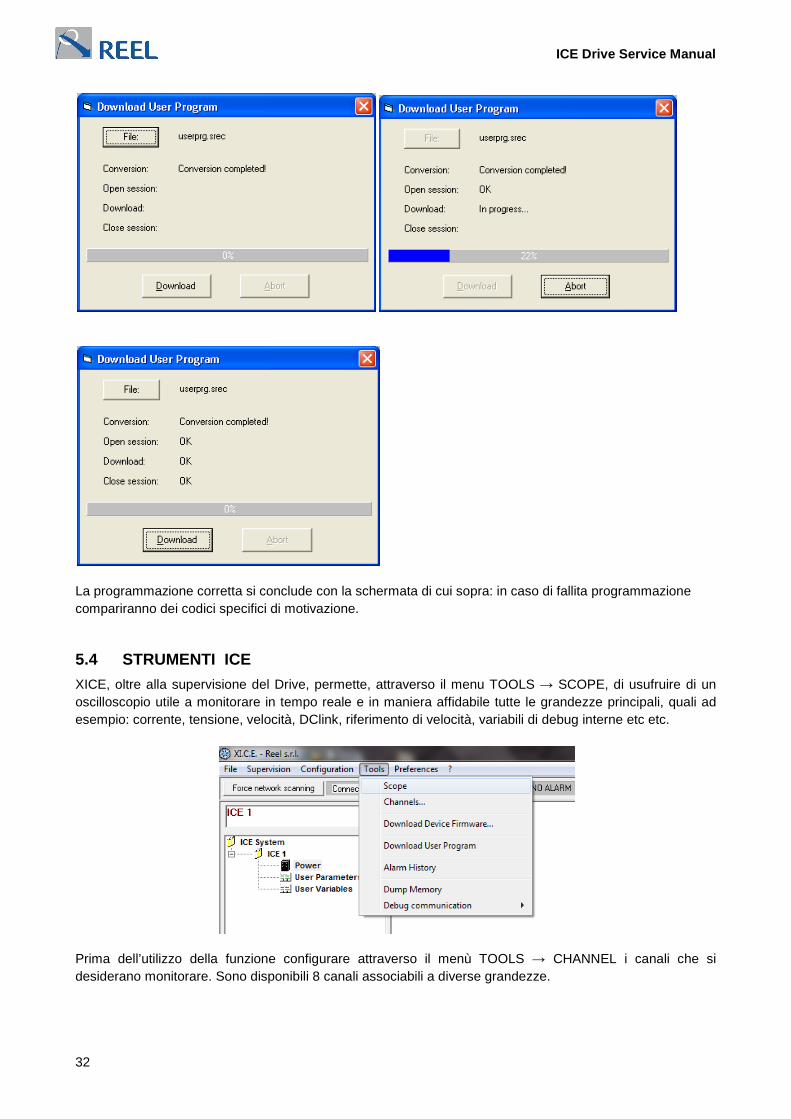
Aggiornamento/caricamento User Program di ICE Prima di effettuare qualsiasi aggiornamento del User Program è buona regola disattivarlo attraverso il gruppo parametri “DRIVE” e agendo sul flag specifico di “Enable User Program”
Per acquisire il settaggio è necessario uno spegnimento e riaccensione del drive ICE La sequenza per aggiornamento firmware di ICE è: Menù → tools → download user program → richiesta di selezione del file specifico → ricerca del file specifico → caricamento del file specifico → conversione e poi conferma del download. Tutti i passaggi sopra citati sono sotto riportati nella grafica specifica di XIce.
ICE Drive Service Manual
32
La programmazione corretta si conclude con la schermata di cui sopra: in caso di fallita programmazione compariranno dei codici specifici di motivazione.
5.4 STRUMENTI ICE
XICE, oltre alla supervisione del Drive, permette, attraverso il menu TOOLS → SCOPE, di usufruire di un oscilloscopio utile a monitorare in tempo reale e in maniera affidabile tutte le grandezze principali, quali ad esempio: corrente, tensione, velocità, DClink, riferimento di velocità, variabili di debug interne etc etc.
Prima dell’utilizzo della funzione configurare attraverso il menù TOOLS → CHANNEL i canali che si desiderano monitorare. Sono disponibili 8 canali associabili a diverse grandezze.

ICE Drive Service Manual
33
Attraverso il menù “TOOLS” selezionare “SCOPE”:
Premendo il tasto START ha inizio l’acquisizione; premendo il tasto STOP termina la acquisizione. L’acquisizione può essere amplificata con “Amplitude” e modificarne la base dei tempi attraverso “Time Base”. Attraverso la voce History si può inoltre visualizzare l’andamento delle grandezze in un tempo molto più lungo della schermata in uso: la slide sotto il grafico vi permetterà di scorrere lungo tutto l’asse del tempo. Durante l’uso dell’oscilloscopio non possono venire modificati i parametri di funzionamento motore ma restano operativi solo i comandi di marcia (Drive On, En1, Cw, CCw) Le forme d’onda visualizzate quando salvabili e ricaricabili a piacere attraverso il menù a tendina “Save Plot” (salvataggio del grafico) e “Load Plot” (caricamento del grafico) I file generati avranno estensione “.plt”

ICE Drive Service Manual
34
5.5 INFORMAZIONE DELLE VERSIONI SW INSTALLATE IN IC E
Nel menu a tendina “? → DEVICE INFO” è possibile visualizzare la versione di FIRMWARE e, se presente, la versione di “User Program” eventualmente installato:
Sempre nel menu “?” → About XICE…” è possibile visualizzare la versione di supervisore come da immagine sottostante:

ICE Drive Service Manual
35
66 PPAARRAAMMEETTRRIIZZZZAAZZIIOONNEE IICCEE
6.1 ELENCO PARAMETRI DI CONTROLLO
I controlli attualmente disponibili nel prodotto ICE sono
- SVC (Space Vector Control) specifico per motori asincroni con e senza retroazione - SSP (Sensorless Speed Position) specifico per motori SSP - SSP-IPM (Sensorless Speed Position con magneti) specifico per motori SSP con a bordo i magneti
Ogni tipologia di controllo è divisa in gruppi di parametri in modo da agevolare l’utilizzatore.
I gruppi riportati nell’immagine successiva sono i seguenti: - MOTOR - RUN - V/f CURVES - DRIVE - I/O - P.I.D - CONTROL - COMMUNICATION
Ogni tipologia di controllo prevede un set specifico di parametri di seguito riportati. I parametri che non vengono utilizzati, selezionati dal tipo di controllo, vengono automaticamente disattivati e resi non accessibili o modificabili all’utente. NOTA! Nella tabella che seguirà la presenza della @ indica in base al controllo adottato se il parametro in questione è ATTIVO e ACCESSIBILE.

ICE Drive Service Manual
36
6.2 MOTOR
NOME RANGE UNITÀ DESCRIZIONE SV
C
SS
P
SS
P-I
PM
IaN 0.1-Inom size
1/10 A Corrente nominale del motore (dato di targa) @ @ @
Imax 0.1-Imax size 1/10 A Corrente di sovraccarico ammessa @ @ @
Uln 200-600 V Tensione nominale applicata al motore @ Fln 25-1000 Hz Frequenza nominale del motore @ @ @ Fmax 1-1000 1/10 Hz Frequenza massima di funzionamento @ Fmin 0.0-Fmax 1/10 Hz Frequenza minima di funzionamento @ @ @ Nn 0-8000 rpm Numeri di giri nominali del motore @ @ @ Nmax 0-30000 rpm Numeri di giri massimi di funzionamento @ @ SpeedMin 0-Nmax Hz-rpm Numero di giri minimi di funzionamento @ @ @ CosPhi 0.30-0.99 - Fattore di potenza Poles 2-20 - Numero di coppie polari @ @ @
Rs 0-320 1/100 Ohm
Resistenza di fase per motori a stella, o 1/3 per collegato a triangolo
@ @
Tmax 0-320 1/10 Nm Torque limit for SSP-IPM control @ PTC Thr (Threshold)
0-29400 ohm Soglia allarme PTC @ @ @
PTC Limit 0-65535 ohm Valore PTC limite per la segnalazione e la riduzione della velocità
@ @ @
PTC LimitH 0-65535 ohm Limite inferiore per isteresi sul valore limite PTC per la segnalazione e la riduzione della velocità
@ @ @

ICE Drive Service Manual
37
6.3 RUN
NOME RANGE UNITÀ DESCRIZIONE SV
C
SS
P
SS
P-I
PM
ACC 0.0-999.9 s Tempo di accelerazione allo start @ @ @ DEC 0.0-999.9 s Tempo di decelerazione all’arresto @ @ @ TImax 0.1-10.0 s Tempo limite di sovraccarico (I2t) del motore @ @ @
msr 0.1Hz-Fmax 1rpm-Nmax
Hz-rpm Soglia del relè di minima velocità in Hz @ @ @
Ftw 0-9999 Hz Frequenza di taglio del filtro passa-basso sull’osservatore di velocità. Nel controllo SSP funge da filtro per il Pid di velocità.
@ @
R1Memo
0-65535 Riferimento di START_UP memorizzato @ @ @
Reference
Jog1 0-Fmax 0-Nmax
Hz-rpm Riferimento di velocità fisso 1 @ @ @
Jog2 0-Fmax 0-Nmax
Hz-rpm Riferimento di velocità fisso 2 @ @ @
Jog3 0-Fmax 0-Nmax
Hz-rpm Riferimento di velocità fisso 3 @ @ @
Fix 1 ±100.00 % Riferimento digitale (per abilitarlo selezionare “ SELECT_0/1/2” sull’ingresso Din1-6 da associare )
@ @ @
Fix 2 ±100.00 % Riferimento digitale (per abilitarlo selezionare “SELECT_0/1/2” sull’ingresso Din1-6 da associare)
@ @ @
Fix 3 ±100.00 % Riferimento digitale (per abilitarlo selezionare “SELECT_0/1/2” sull’ingresso Din1-6 da associare)
@ @ @
Fix 4 ±100.00 % Riferimento digitale (per abilitarlo selezionare “ Select 1/2/3” sull’ingresso da associare) @ @ @
Fix 5 ±100.00 % Riferimento digitale (per abilitarlo selezionare “ Select 1/2/3” sull’ingresso da associare)
@ @ @
Fix 6 ±100.00 % Riferimento digitale (per abilitarlo selezionare “ Select 1/2/3” sull’ingresso da associare)
@ @ @
Fix 7 ±100.00 % Riferimento digitale (per abilitarlo selezionare “ Select 1/2/3” sull’ingresso da associare)
@ @ @

ICE Drive Service Manual
38
6.4 V/F CURVE
NOME RANGE UNITÀ DESCRIZIONE SV
C
SS
P
SS
P-I
PM
SVC V/f characterization
V0 0-100 % Valore di tensione applicato al motore alla frequenza F0. @ F0 0-100 % Determina il valore di fine apporto della V0 @ F1 0-100 % Valore di tensione applicato al motore alla frequenza F1 @ V1 0-100 % Determina il valore di fine apporto della V1 @ F2 0-100 % Valore di tensione applicato al motore alla frequenza F2 @ V2 0-100 % Determina il valore di fine apporto della V2 @ F3 0-100 % Valore di tensione applicato al motore alla frequenza F3 @ V3 0-100 % Determina il valore di fine apporto della V3 @ F4 0-100 % Valore di tensione applicato al motore alla frequenza F4 @ V4 0-100 % Determina il valore di fine apporto della V4 @
Frequency Skip
Skip 1 0-Fmax 0-Nmax
Hz-rpm Valore di velocità da saltare al punto 1 @ @ @
Skip 2 0-Fmax 0-Nmax
Hz-rpm Valore di velocità da saltare al punto 2 @ @ @
Skip 3 0-Fmax 0-Nmax Hz-rpm Valore di velocità da saltare al punto 3 @ @ @
Skip 4 0-Fmax 0-Nmax
Hz-rpm Valore di velocità da saltare al punto 4 @ @ @
Bandwidth
0-10.0Hz 0-300rpm
Hz-rpm Valore della larghezza di banda attorno ad ogni salto di frequenza
@ @ @

ICE Drive Service Manual
39
6.5 DRIVE
NOME UNITÀ RANGE DESCRIZIONE SV
C
SS
P
SS
P-I
PM
Drive Setup
Type - - Visualizza il tipo di azionamento: SVC – SSP – SSP-IPM
PWM Khz 2,5 – 4 - 8 Frequenza di modulazione @ @ @
Setup
Hex
Drive ON 0=HW 1=SW EN1 0=HW 1=SW CW/CCW 0=HW 1=SW
EN2 0=HW 1=SW Reset 0=HW 1=SW Speed/Torque 0=HW 1=SW Speed Reference 1 0=HW 1=SW Reference 2 0=HW 1=SW
Enable Motopotentiometer (Ref1 SW) 1=Enabled, SSP Eff. Control 0=HW 1=SW AN1 0-10V, 4-20mA 0= 0÷10V 1=4-20mA
AN2 0-10V, 4-20mA 0=0÷10V 1=4-20mA
Energy Saving 0=OFF 1=ON
@ @ @
Setup 2
Hex
Motor thermal
0=Alarm, 1=Speed Reduction
Drive thermal
0=Alarm, 1=Speed Reduction
Lock CW Direction: Standard Flux Direction Dead time compensation Supply mode
0=OFF 1=ON 0=Disable, 1=Enable 0=Disable, 1=Enable 0=Line, 1=Generator
@ @ @
Size - 8.0 – 21.0 Taglia del drive in uso @ @ @
Killer
-
0-10
Limite della durata dell’intervento della resistenza di frenatura 0= 60ms max in 60s (A protezione della resistenza interna) 1= 200ms max in 10s (Solo con resistenza
@ @ @

ICE Drive Service Manual
40
esterna) 2= 500ms max in 10s (“) 3= 750ms max in 10s (“) 4= 1000ms max in 10s (“) 5= 1500ms max in 10s (“) 6= 2000ms max in 10s (“) 7= 3000ms max in 10s (“) 8= 4000ms max in 10s (“) 9= 6000ms max in 10s (“) 10= intervento non limitato (“)
Off. DC Link
- ±100V Compensazione lettura offset di tensione DC Link @ @ @
OPT-HwType - 0-1 Scelta del tipo di scheda opzione @ @ @
User Program setup
ConfigUP Hex
Enable User Program @ @ @
Up Cycle Time
mS 1-50 Ciclo d’intervento del programma Utente @ @ @

ICE Drive Service Manual
41
6.6 I/O
NOME UNITÀ RANGE DESCRIZIONE SV
C
SS
P
SS
P-I
PM
Polarity Hex
DIN1-5: 0=uncheck= Active High, 1 =check= Active Low DOUT1-3: 0=uncheck= uscita NO (open)= attiva closed 1=check= uscita NC (closed)=attiva open
@ @ @
Digital Input/ Output
Din1 0-21
Funzione dell’ingresso digitale programmabile: 0= disable 1= drive ON CW 2= drive ON CCW 3= EN1 4= EN2 5= CW/CCW 6= Reference UP 7= Reference DOWN 8= Jog1 9= Jog2 10=Jog3 11= Speed/Torque 12= Reset ALARMS 13= Bypass ramps 14= Thermal probe (solo per “I1+I4”) 15= ------- 16= Start CW 17= Start CCW 18= Select_0 19= Select_1 20= Select_2 21= Out AN Selection
@ @ @
Din2 0-21 Come Din1 @ @ @ Din3 0-21 Come Din1 @ @ @ Din4 0-21 Come Din1 @ @ @ Din5 0-21 Come Din1 @ @ @
Dout1 0-11
Funzioni associabili all’uscita digitale programmabili: 0= disable (out analogica abilitato) 1= msr 2= Brake 3= speed set reached 4= direction 5= alarm 6= drive thermal warning 7= motor thermal warning 8= drive OK 9=EV IGBT cooling 10=Pre-charge OK
@ @ @
Dout2 0-11 Come Dig. Out 1 @ @ @ Dout3 0-11 Come Dig. Out 1 @ @ @
Analog Input

ICE Drive Service Manual
42
Off_AN1 ±999 Offset ingresso analogico AN1 @ @ @ Off_AN2 ±999 Offset ingresso analogico AN2 @ @ @
Analog Output
Out_AN1 - 0-3
Funzione dell’uscita analogica programmabile: 0= disable 1= speed ± 10V 2= current 0 ± 10V 3= DC Link voltage 0÷10V(10=1000Vdc)
@ @ @
kOut_AN1 - 0.01-99.99
Fattore di scala uscita analogica @ @ @
Out_ANaux - 0-3 Uscita analogica ausiliaria (attiva con configurazione ingresso Din)
@ @ @
kOut_ANaux - 0.01-99.99
Fattore di scala uscita analogica ausiliaria @ @ @
Off_Out_AN @ @ @ Ftw_Out_AN Hz 1-100 Filtro su uscita analogica @ @ @
OPT 59980 Digital Input/Output
OPT-Dout1 0-11 Come Dig. Out 1 + 11= EV Bridbge cooling
@ @ @
OPT-Dout2 0-11 Come Dig. Out 1 + 11= EV Bridbge cooling
@ @ @
OPT-BridbgePTC
Ohm 0-9500 Valore di soglia in Ohm della sonda termica di tipo PTC oltre cui deve essere attivata l’uscita digitale OPT-Dout1 e/o OPT-Dout2.
@ @ @
OPT-PTC-Thr
Ohm 0- (OPT-BridbgePTC-100)
Valore di soglia in Ohm della sonda termica di tipo PTC sotto cui deve essere disattivata l’uscita digitale OPT-Dout1 e/o OPT-Dout2.
@ @ @
6.7 P.I.D.
NOME UNITÀ RANGE DESCRIZIONE SV
C
SS
P
SS
P-I
PM
Current Loop
Kpl - 0-9999 Costante proporzionale del regolatore di corrente @ @ @ Kil - 0-9999 Costante integrale del regolatore di corrente @ @ @
Speed Loop
Kpw - 0-9999 Costante proporzionale del regolatore di velocità @ @ Kiw - 0-9999 Costante integrale del regolatore di velocità @ @ Kdw - 0-9999 Costante derivative del regolatore di velocità @ @
Tdw ms 0-3000 Limite della banda passante del filtro sul feedback per la costante Kdw
Flux Loop
Kpflx - 0-9999 Costante proporzionale del regolatore di flusso @ @ Kiflx - 0-9999 Costante integrale del regolatore di flusso @ @

ICE Drive Service Manual
43
6.8 CONTROL
NOME UNITÀ RANGE DESCRIZIONE SV
C
SS
P
SS
P-I
PM
Dc-Link Compensation
Kp_Des - Costante proporzionale del desaturatore di tensione in deflussaggio
@ @
Ki_Des - Costante integrale del desaturatore di tensione in deflussaggio @ @
Kstune - 0-512 Valore digitale di tensione per riconoscimento della posizione iniziale @
Debug
Aux 1 Hex Parametro riservato al debug @ @ @ Aux 2 Hex Parametro riservato al debug @ @ @
SSP Control
Kls - 0-30000 Guadagno del modello a bassa velocità @ @
Khs - 0-30000 Contributo del modello ad alta velocità nel funzionamento a bassa velocità
@ @
Khh - 0-30000 Guadagno del modello ad alta velocità @ @ Injection - 0-30000 Ampiezza del segnale di iniezione @ @ Ld_set - 0-30000 Ampiezza del riferimento di flusso @ @ Maxtr - 0-30000 @ @
Kp_tr (track) - 0-30000 Di sola lettura: costante di proporzionale del PI di flusso
@ @
Ki_tr (track - 0-30000 Di sola lettura: costante integrale del PI di flusso @ @ T_fil ms 0-30000 Filtra la visualizzazione della velocità a display @ @
6.9 COMMUNICATION
NAME UNIT RANGE DESCRIPTION SVC SSP SSP-IPM
RS485 Modbus RTU
Baudrate bps 0-3
0= 9600 1= 19200 2= 38400 3= 57600
@ @ @
Address - 1-247 @ @ @

ICE Drive Service Manual
44
77 DDEESSCCRRIIZZIIOONNEE PPAARRAAMMEETTRRII
7.1 MOTOR
I parametri motore sono quelli che servono per la definizione e corretto settaggio del motore. I parametri che non risultano usati dal tipo di controllo selezionato risultano disabilitati e non accessibili da supervisore XIce. Ian
Corrente nominale del motore (dato di targa).
Imax
Corrente massima che il modulo può erogare. Il tempo di permanenza in sovraccarico dipende dal valore di TImax
Uln Tensione nominale del motore espressa in Volt.
Fln Frequenza nominale del motore espressa in Hz.
Fmax Fondo scala del riferimento di frequenza massima di funzionamento. Fmin
Parametro espresso in decimi di Hz che indica la frequenza minima alla quale il drive inizia il proprio funzionamento ovvero inizia la modulazione sul motore.
Nm Velocità nominale del motore espressa in rpm.
NMax Fondo scala del riferimento di velocità massima espressa in rpm.
SpeedMin Velocità minima d’avviamento/mantenimento del motore espressa in rpm. Se abilitato il drive si porta alla velocità impostata su questo parametro. NOTA! non superare i dati di targa del motore in uso.
Cosfi Fattore di potenza detto anche scorrimento nominale del motore in uso.
Poles Numero di coppie polari del motore.
Rs Resistenza statorica fase-fase per motori con collegamento a stella.
Tmax PTC-Thr (threshold)
Limite di coppia per controllo SSP-IPM. Valore di allarme PTC espressa in ohm. L’allarme (Motor PTC) interviene se il valore della PTC (collegata su ingresso PTC Motor della scheda di potenza) supera il valore impostato su tale parametro. E’disattivato quando il valore è impostato a zero.
PTC Limit Soglia di “warning” della PTC, espressa in Ohm. Interviene come avvertimento se il valore PTC supera il valore impostato in questo parametro attivando se attivata la funzionalità correlata di riduzione della velocità. La funzione è disattivata quando il valore è impostato a zero.

ICE Drive Service Manual
45
PTC LimitH Isteresi sulla soglia d’allarme del valore della PTC, espresso in ohm. Se l’allarme (motor PTC) è impostato, la riduzione della velocità avverrà solo fino a quando il valore della PTC sarà inferiore a quanto impostato in questo parametro. Entrambe le segnalazioni sono disattivate quando il valore è impostato a zero. Esempio applicativo: PTC Thr = 5000 PTC limit 4000 PTC limitH 2000 Se la temperatura PTC sale fino a 5000 il sistema fa allarme, a 4000 riduce la velocità e cerca di ridurla fino al valore di 2000.
7.2 RUN
A questa categoria appartengono tutti i parametri caratteristici della messa in marcia relativi alla dinamica dell’applicazione. Acc.
Tempo necessario, espresso in decimi di secondo, per compiere una variazione di velocità positiva, da zero al valore massimo impostato con il parametro nMax.
Dec. TImax
Tempo necessario, espresso in decimi di secondo, per compiere una variazione di velocità negativa, dal valore massimo impostato al valore zero con il parametro nMax Tempo massimo di permanenza in sovraccarico alla Imax impostata.
Msr Ftw
Indica la soglia del relè di minima velocità (minimum speed relay): se configurata attiva la relativa digitale out quando la velocità in uscita supera questo valore. Frequenza di taglio del filtro passa-basso sull’osservatore di velocità. Nel controllo SSP e retroazionati funge da filtro per il PID di velocità.
R1 memo
Memorizza un riferimento digitale iniziale di velocità: all’avvio, il setpoint di velocità viene precaricato con il valore contenuto in questo parametro.
References Jog1 Valore di riferimento fisso di velocità attivabile configurando un ingresso digitale.
Viene espresso in Hz o rpm a seconda del controllo utilizzato.
Jog2 Valore di riferimento fisso di velocità attivabile configurando un ingresso digitale. Viene espresso in Hz o rpm a seconda del controllo utilizzato.
Jog3 Valore di riferimento fisso di velocità attivabile configurando un ingresso digitale. Viene espresso in Hz o rpm a seconda del controllo utilizzato.
Fix 1÷7 “Funzione multi velocità digitali”: permette di fissare 7 livelli di velocità, richiamabili anche in sommatoria, per mezzo dell’attivazione di 3 ingressi hardware (select_0, select_1, select_2) associabili agli ingressi programmabili Din1 ÷ Din6 secondo la tabella successiva.

ICE Drive Service Manual
46
La combinazione dei vari ingressi di Select, con drive abilitato On ed E1, seleziona la velocità impostata sui Fix espresso in % su Fmax o Nmax impostata.
7.3 V/F CURVE PARAMETERS
A questa categoria appartengono tutti i parametri caratteristici della curva V/F. Permette di fare varie spezzate al fine di ottimizzare la partenza del motore (boost di tensione a bassi giri) decidendo l’andamento della tensione . Questi parametri hanno valore solo in controllo SVC. SVC V/f characterization
V0 Esprime il valore di tensione applicato al motore alla frequenza f0.
F0 Determina il valore in frequenza di fine contributo della V0.
V1 Esprime il valore di tensione applicato al motore alla frequenza F1.
F1 Determina il valore in frequenza di fine contributo della V1
V2, V3, V4 Esprime il valore di tensione applicato al motore alla frequenza F2, F3, F4.
F2, F3, F4 Determina il valore in frequenza di fine contributo delle tensioni V2, V3, V4.
XICE visualizza la curva modificata tramite il grafico visualizzato nella schermata (vedi esempio sotto):
Frequency Skip
Skip1,Skip2, Skip3,Skip4
Determina il punto di lavoro in velocità da evitare nella rampa di accelerazione o decelerazione. La loro azione interessa punti particolari di funzionamento dove si vuole evitare di sostare durante la lavorazione (punti di risonanza meccanica, punti di vibrazione etc etc). Viene espresso in Hz o rpm a seconda del controllo utilizzato.
Bandwidth
Determina la larghezza di banda da saltare attorno ad ogni salto di frequenza
Select 0 Select 1 Select 2 Selezione attivata 0 0 0 Nessuna funzione 0 0 1 Fix. 1 0 1 0 Fix. 2 0 1 1 Fix. 3
1 0 0 Fix. 4 1 0 1 Fix. 5 1 1 0 Fix. 6 1 1 1 Fix. 7

ICE Drive Service Manual
47
selezionato. Il riferimento di velocità da evitare in frequenza parte da: Skipx– Bandwidth fino a Skipx + Bandwidth.
7.4 DRIVE
Drive Setup Type Indica la tipologia di controllo installata nel drive e non è modificabile (di sola lettura
SVC: Space Vector Control
Attua una legge lineare del rapporto “tensione / frequenza” ad un motore asincrono. Fissati i punti nominali, per esempio 50Hz/400V, il drive impone una tensione ed una frequenza al motore in funzione di questi (a 25Hz il motore verrà alimentato a 200V; a 15Hz 120V ecc.). Solo a bassi regimi il rapporto è variato, per compensare la caduta di tensione sulla resistenza interna del motore, che limiterebbe la corrente erogabile e quindi la coppia. Per valori di frequenza superiori al nominale, la tensione è mantenuta costante (ad esempio: 70Hz/400V), con conseguente calo della coppia ottenibile a parità di corrente; questo tratto è denominato “potenza costante” o per analogia al “deflussaggio” del motore in continua”. Il controllo SVC tratta la relazione V/Hz in modo vettoriale: nell’algoritmo di calcolo il parametro “tensione” è elaborato come un vettore in rotazione alla frequenza richiesta. In questo modo, le compensazioni che il controllo attua alle varie velocità garantiscono un elevato livello di coppia già a bassissimi giri. Già ad una frequenza d’alimentazione di 1Hz si ha la coppia nominale del motore alla corrente di targa dello stesso. Il controllo vettoriale in tensione è particolarmente indicato per applicazioni dove più motori sono collegati in parallelo e pilotati dallo stesso drive, condizione non accettata da altri controlli come l’”inverter vettoriale puro”. Il maggiore vantaggio di questo controllo consiste nel fatto che non richiede retroazione di velocità, se non per compensare in modo preciso l’aumentare dello scorrimento in funzione del carico (condizione non sempre richiesta, poiché una compensazione parziale è già eseguita in sensorless).).

ICE Drive Service Manual
48
SSP:Sensorless Speed Position È un sistema “Motore-Azionamento” centrato sulla stima della posizione teorica per consentire sempre il corretto orientamento del campo e la coppia massima. Con un algoritmo basato sulla conoscenza perfetta dei parametri del motore, il drive I C E è in grado di controllare la posizione angolare di rotazione del motore SSP e quindi la sua velocità, con assoluta precisione. Il sistema SSP, sensorless di velocità e posizione, è destinato a cambiare e sostituire gran parte delle movimentazioni realizzate con controlli in anello chiuso e non. Il drive controlla analiticamente il fluire della corrente fornita al motore SSP che, grazie alla sua particolare forma costruttiva, porta le informazioni necessarie per individuare la posizione dell’albero motore. La posizione è raggiunta “leggendo” come un sensore il motore stesso, per ottenere:
- Velocità con precisione assoluta in un sistema SENSORLESS assoluto, a tutti i regimi, - Controllo di posizione o spazio fatto senza FEEDBACK aggiuntivi.
La velocità garantita è quella impostata, con un margine di errore del 0.01% (1 su 10000) che è paragonabile a quella dichiarata come errore da un buon sistema in anello chiuso (retroazione da un trasduttore di buona tecnologia). L’errore di posizione dell’albero motore è di +/- 1.5° meccanici, la ripetibilità sulla stessa posizione è di +/- 0.1 - 0.2°.
Il motore SSP non ha contatti a spazzola e magneti, quindi ha lo stesso vantaggio di un motore asincrono: non necessita di manutenzione programmata, tranne che per i cuscinetti. Il momento d’inerzia, rispetto a quello di un motore asincrono classico, è molto inferiore grazie alla specifica potenza maggiore (a parità di volume meccanico) e di conseguenza un motore più leggero. Il ripple di coppia è paragonabile a quello di un servomotore.
SSP-IPM :Sensorless Speed Position Interior Permanent Magnet Ha le stesse caratteristiche del controllo SSP, ma questo è dedicato a motori SSP progettati con magneti permanenti
Indica la frequenza di modulazione di lavoro dell’ I C E. Selezioni possibili:
αβαβ
ω
ω
θ
αβ
θβ
α
λθ

ICE Drive Service Manual
49
PWM Setup
2,5 KHz 4 KHz 8 KHz (modulazione PWM standard) 2,51 KHz 4,01 KHz 8,01 KHz (modulazione PWM random)
Modulazione PWM Random : ampiezza di frequenza Random possibile sulla PWM impostata, permette di avere una PWM variabile entro i limiti imposti da questo parametro riducendo notevolmente le emissioni acustiche del motore. PWM Random è settabile scrivendo la frequenza con decimo superiore. Il parametro seleziona la possibilità di configurare il drive con comandi hardware oppure software, sceglie il tipo di riferimento adottato nel sistema (in corrente o in tensione) e prevede la possibilità di una speciale funzione Energy Saving per ridurre le perdite. La scelta della modalità di comando avviene tramite il menù a tendina della voce setup attivando o meno i vari flag presenti (flag presente= 1 flag non presente=0) (vedi tabella sotto riportata).
Setup 2
Valore Hex
Funzione Descrizione
1 Drive On (0=HW 1=SW) Abilitazione Drive 2 Reference1 (On 0=HW 1=SW) EN1 Abilitazione Riferimento 1 4 Cw/CCW (0=HW 1=SW) Senso di rotazione (orario, antiorario) 8 Reference2 (On 0=HW 1=SW) EN2 Abilitazione Riferimento 2 10 Alarm Reset (0=HW 1=SW) Reset Allarmi 20 Speed/Torque Control (0=HW 1=SW) Abilitazione controllo velocità o coppia 40 Speed Reference 1 (0=HW 1=SW) Riferimento 1 80 Reference 2 (0=HW 1=SW) Riferimento 2
100 Enable Motopotentiometer (solo con riferimento sw)
Funzione motopotenziometro (funziona solo con riferimento 1 da SW)
200 SSP Eff.controll (0=OFF 1=ON) 400 AN1 type (0=0-10V 1=4-20mA) Tipo di riferimento1 (tensione , corrente) 800 AN2 type (0=0-10V 1=4-20mA) Tipo di riferimento2 (tensione , corrente) Energy Saving (0=OFF 1=ON)
Configurazione del drive in relazione alla corrente erogata. Le selezioni possibili sono :
Valore Hex Funzione
1 Motor Thermal : 0=Alarm, 1=Speed Reduction
- Non Usato
- Non Usato
8 Drive Thermal 0=Alarm, 1=Speed Reduction
10 Lock CW Direction 0=OFF, 1=ON
20 Standard Flux Direction 0=Disable, 1=Enable
40 Dead time compensation 0=Disable, 1=Enable
80 Supply mode 0=line ,1=Generator

ICE Drive Service Manual
50
Motor Thermal Permette di scegliere il comportamento del drive quando questo entra nella condizione di sovraccarico (I²t) o di PTC motore. Le selezioni possibili sono: 0=Alarm, 1=Speed Reduction.
- 0=Alarm: il drive indica il relativo allarme ed il motore viene abbandonato, - 1=Speed Reduction: viene ridotto il setpoint di velocità fino a quando non rientra la
condizione di anomalia. La selezione “Speed Reduction” consente di ottenere la massima continuità di esercizio, naturalmente ha senso solo per carichi che hanno una caratteristica di coppia ascendente con la velocità.
Drive Thermal Permette di scegliere il comportamento del drive quando questo entra nella fascia di sovratemperatura dei componenti di potenza (IGBT) o della scheda di regolazione (Env.). Le selezioni possibili sono: 0=Alarm, 1=Speed Reduction.
- 0= Alarm: il drive indica il relativo allarme ed il motore viene abbandonato, - 1= Speed Reduction: viene ridotto il setpoint di velocità fino a quando non rientra la
condizione di anomalia.
Lock CW Direction Permette di bloccare il senso di rotazione del motore solo nella direzione CW: è un parametro particolarmente usato associato al parametro successivo quando si vuole evitare una certa direzione del motore ritenuta errata. Le selezioni possibili sono: 0=OFF, 1=ON.
- 0= funzione disabilitata e quindi sono consentite entrambe le direzioni. - 1= funzione abilitata e quindi viene consentita solo una direzione (CW)
Standard FLUX Direction Permette di decidere lo standard di rotazione secondo la corrispondenza di U/V/W. Le selezioni possibili sono: 0=Disable, 1=Enable.
- 0= rotazione secondo impostazione di default di REEL(CW: senso antiorario albero motore)
- 1= funzione abilitata, rotazione secondo lo standard di mercato e quindi corrispondenza di UVW con RST del motore (CW: senso orario albero motore.
Dead Time compensation Permette la compensazione del dead time tipicamente richiesta nelle applicazioni a vuoto a bassi giri con motori asincroni a partire da una certa potenza in poi. Le selezioni possibili sono: 0=Disable, 1=Enable.
- 0= compensazione dead time disabilitata - 1= compensazione dead time abilitata
Supply mode In caso di alimentazione da gruppo elettrogeno potenzialmente più induttivo il fattore di forma della tensione di uscita potrebbe essere maggiormente distorto generando delle problematiche nelle applicazioni con inverter. La selezione di questa funzione introduce delle particolari compensazioni e migliorie nel controllo evitando il fuori servizio dell’inverter ICE. Le selezioni possibili sono: 0=Disable, 1=Enable.
- 0= alimentazione da linea elettrica stabile - 1= alimentazione da gruppo elettrogeno
Size
Seleziona la taglia del modulo in funzione della potenza del drive e quindi dei relativi aspetti costruttivi: è un parametro importante che va sempre associato all’etichetta di identificazione

ICE Drive Service Manual
51
del drive
NOTA! Un errato settaggio compromette il buon funzionamento del controllo.
Killer Costante di protezione termica della resistenza di frenatura. In caso d’intervento del circuito di frenatura, il drive effettua una sommatoria dei tempi d’inserzione della resistenza, su una base di 10 secondi. La protezione termica con relativo allarme interviene quando raggiunge il valore limite impostato nel parametro, dove:
- 0 = 60 mSec, - 9 = 6 Sec, - 10 = intervento non limitato.
Campo di tarature 0 - 10, valore di default = 0
NOTA! La resistenza integrata è protetta solo con la variabile posta a zero. Un errato settaggio compromette l’integrità della resistenza! Valori superiori a 0 vanno impostati solo con resistenza di frenatura esterna.
Offset DcLink
Valore di taratura della lettura del DCLINK. La tensione DC e la lettura da XIce devono essere allineati in quanto i vari controlli implementati (in particolare nel sistema retro azionato e sensorless SSP) effettuano delle compensazioni e regolazioni che necessitano di questo valore corretto. Il parametro in oggetto serve per allineare in maniera precisa il valore reale con quello letto da supervisore compensando eventuali differenze legate anche alla tolleranza della componentistica hardware. Viene di norma verificata e tarata in azienda durante il ciclo di collaudo. La taratura va sempre verificata ed eventualmente ripetuta dopo le seguenti operazioni:
- Sostituzione scheda di regolazione - Riprogrammazione di default della scheda regolazione - Scaricamento file parametri da XIce

ICE Drive Service Manual
52
User Program setup Config UP Area parametri nella quale viene configurato User Program per il cliente.
Nel menù a tendina relativo viene riportato parametro di abilitazione all’esecuzione di User Program attivabile tramite selezione a flag. Per l’effettiva esecuzione è necessario riavviare il drive (reset oppure spegnimento e accensione). Se l’esecuzione è stata attivata correttamente comparirà nel supervisore XIce la scritta “User”. Anche la disattivazione di User Program prevede il riavvio del sistema con conseguente rimozione della scritta User nel supervisore XIce..
Up Cycle Velocità di esecuzione del programma utente espresso in millisecondi ‘per ogni ciclo di lavoro. Time
7.5 PARAMETRI I/O
A questa categoria appartengono tutti i parametri degli ingressi e delle uscite del drive:
Digital Input/Output Polarit y Possibilità di selezionare per ogni ingresso/uscita digitale la polarità di attivazione (comando
positivo o negativo). Le selezioni possibili sono: DIN 1-5=Uncheck=active HIGH 1=Check=active LOW Valore Impostato Selezione Del Controllo 0 (active HIGH) Attivazione da comando positivo 1 (active LOW) Attivazione da comando negativo
DOUT 1-3:0 (Uncheck) =output NO=active closed 1=check=output NC(closed)=active open Valore Impostato Selezione Del Controllo 0 (uscita NO) Uscita attiva con contatto chiuso 1 (uscita NC) Uscita attiva con contatto aperto

ICE Drive Service Manual
53
DIN1 ÷ DIN5
Programmazione degli ingressi digitali tramite il menù a tendina presente per ogni ingresso.
Selezione Significato 0-Disabled Nessuna selezione attiva
1-Drive On Cw Abilitazione del drive con rotazione CW del motore: con ingresso attivo si accenderà nel supervisore Drive On con la selezione Cw
2-Drive On Ccw Abilitazione del drive con rotazione CCW del motore: con ingresso attivo si accenderà nel supervisore Drive On con la selezione Ccw
3-En 1 Abilitazione del riferimento 1 di velocità: con ingresso attivo si accenderà nel supervisore En1
4-En 2 Abilitazione del riferimento 2: : con ingresso attivo si accenderà nel supervisore En2
5-Cw/Ccw Inversione senso di rotazione motore con indicazione nel supervisore della direzione scelta. Ingresso attivo = senso CCW
6-Reference Up Ingresso per incremento setpoint in modalità moto potenziometro 7-Reference Down Ingresso per decremento setpoint in modalità moto potenziometro 8-Jog 1 Abilitazione velocità fissa preimpostata nel parametro Jog 1 9-Jog 2 Abilitazione velocità fissa preimpostata nel parametro Jog 2 10-Jog 3 Abilitazione velocità fissa preimpostata nel parametro Jog 3
11-Speed/Torque Selezione della modalità di gestione da velocità a coppia controllata Ingresso attivo = gestione coppia
12-Reset Allarms Reset allarmi
13-Bypass Ramp Disabilitazioni delle rampe di ACC e DEC: lingresso attivo = rampe di ACC e DEC nulle.
14- Thermal Probe Sonda termica (a scatto aperta/chiusa) di motore elettrico, tipicamente clipson a scatto.
15- ----- Disponibile
16-Start Cw
Abilitazione drive e al riferimento in senso orario: con ingresso attivo si accenderà nel supervisore Drive On + En1 con la selezione Cw
17- Start Ccw
Abilitazione drive e al riferimento in senso antiorario: con ingresso attivo si accenderà nel supervisore Drive On + En1 con la selezione Ccw
18-SELECT_0 Abilitazione velocità digitale programmata nei parametri FIX (vedere paragrafo 7.2)
19-SELECT_1
Abilitazione velocità digitale programmata nei parametri FIX (vedere paragrafo 7.2)
20-SELECT_2
Abilitazione velocità digitale programmata nei parametri FIX (vedere paragrafo 7.2)
21-OutAN Selection
Selezione della grandezza analogica in uscita. L’uscita analogica fisica è una sola ma tramite questo parametro si può passare internamente al drive da una all’altra. Le selezioni possibili sono:
- quando non attivata l’uscita selezionata è Out AN1 - quando attivata l’uscita selezionata è Out AN aux

ICE Drive Service Manual
54
DO1 ÷ DO3
Parametro che assegna all’uscita digitale corrispondente una funzione.
Valore Impostato Significato Dell’Impostazione
0-Disabled Disabilita uscita
1-msr Minimum speed Relay (relè di minima velocità): uscita attiva fino a quando la velocità in uscita drive supera il valore impostato nel parametro “msr” nel gruppo RUN
2-Brake Freno di stazionamento: l’uscita viene attivata quando il drive viene abilitato (Drive ON)
3-Speed set reached Uscita attiva quando viene raggiunta la quota di velocità impostata
4-Direction Attiva quando il motore gira in direzione CCW
5-Alarm
Allarme generico da drive: uscita attiva = allarme drive
6-Drive Thermal Warning Preavviso di allarme sovratemperatura drive: uscita attiva quando la temperatura IGBT supera 100°C (allarme a 110°C).
7-Motor Thermal Warning
Preavviso di allarme termico motore (I2t): uscita attiva quando la corrente di uscita del drive supera la IaN.
8-Drive ok Nessuna anomalia da drive presente: uscita attiva = drive ok
9-EV IGBT Cooling Abilita la gestione dell’elettrovalvola di apertura/chiusura del raffreddamento a liquido secondo la logica descritta in paragrafo specifico 4.9
10- Precharge OK Uscita attiva quando precarica avviene correttamente
Analog Input
Off_AN1 Parametro che indica l’offset sull’ingresso analogico 1: viene usato quando il riferimento è analogico per azzerare il movimento del motore quando si ritiene il riferimento nullo. Il campo di variazione è +20% ÷ -20% del fondo scala.
Off_AN2
Parametro che indica l’offset sull’ingresso analogico 2 : viene usato quando il riferimento è analogico per azzerare il movimento del motore quando si ritiene il riferimento nullo. Il campo di variazione è +20% ÷ -20% del fondo scala.

ICE Drive Service Manual
55
Analog Output
Out_AN1
Parametri per la programmazione dell’ uscita analogica: assegna all’uscita una delle seguenti funzioni:
Valore Impostato Significato Dell’Impostazione 0-Disabed Disabilitata 1-Speed Uscita di velocità 0-10V (+10 = +Fmax o +Nmax) 2-Current Uscita di corrente 0-10V (+10 = Imax) 3-Dc-Link Voltage Uscita di tensione DC_LINK 10V=1000Vdclink 4- ------ 5-Proc.PID Deviation 6-Proc.PID Feedback
kOut_AN1
Fattore di scala dell’uscita analogica: è un moltiplicatore del valore che si presenta nell’uscita analogica. Quando posto a “1.00” non apporta variazioni lasciando nell’uscita analogica il valore originale. Quando maggiore o minore dell’unità serve per amplificare o ridurre eventuale valori analogici non adeguati.
Out_ANaux Uscita analogica ausiliaria alternativa selezionabile da scambio elettronico interno al drive tramite la configurazione di ingresso digitale Out AN Selection
KOut_ANaux
Fattore di scala uscita analogica ausiliaria: è un moltiplicatore del valore che si presenta nell’uscita analogica quando questa è stata deviata su AN aux. Quando posto a “1.00” non apporta variazioni lasciando nell’uscita analogica il valore originale. Quando maggiore o minore dell’unità serve per amplificare o ridurre eventuale valori analogici non adeguati.
Off_OUT_AN Parametro che indica l’offset sull’uscita analogica: viene usato per azzerare il segnale in uscita quando questo è nullo. Il campo di variazione è +20% ÷ -20% del fondo scala.
Ftw_OUT_AN
Filtro su uscita analogica: introduce un filtro espresso in Hz sull’uscita analogica. L’effetto è quello di rendere l’uscita analogica più stabile con variazioni più morbide rispetto alla reale dinamica del sistema.

ICE Drive Service Manual
56
7.6 PARAMETRI PID
A questa categoria appartengono tutti i parametri di settaggio del PI di corrente, del PID di velocità, del PI di flusso e del PID sul riferimento ausiliario.
Current Loop
Kpl Costante proporzionale del regolatore di corrente.
Kil Costante integrale del regolatore di corrente.
Speed Loop
Kpw Costante proporzionale del regolatore di velocità.
Kiw Costante integrale del regolatore di velocità.
Kdw Costante derivativa del regolatore di velocità
Tdw Limite della banda passante del filtro sul feedback per la costante Kdw
Flux Loop
Kpflx Costante proporzionale del regolatore di flusso
Kiflx Costante integrale del regolatore di flusso.
7.7 PARAMETRI CONTROL
DC- link compensation
KpDes Costante proporzionale del desaturatore di tensione in deflussaggio
KiDes Costante integrale del desaturatore di tensione in deflussaggio.
SSP Efficiency Control
IqFilt Filtro applicato alla componente di corrente Iq
KtAngle Costante in gradi applicata al controllo SSP per riduzione delle perdite
Debug
Aux1 Variabile 1 di debug per la visualizzazione di grandezze interne al controllo
Aux2 Variabile 2 di debug per la visualizzazione di grandezze interne al controllo.
SSP control

ICE Drive Service Manual
57
KLS Guadagno del modello a bassa velocità
KHS Contributo del modello ad alta velocità nel funzionamento a bassa velocità
KHH Guadagno del modello ad alta velocità
Inj Ampiezza del segnale di iniezione
Ldset Ampiezza del riferimento di flusso
Ldset_min Minimo valore di ampiezza del riferimento di flusso
Maxtrack Valore massimo del PI di tracking:regola indirettamente la velocità massima attraverso un moltiplicatore
Kptr costante proporzionale del PI di traking dell’angolo di errore (regolatore di flusso)
Kitr costante integrale del PI di traking dell’angolo di errore (regolatore di flusso)
T_fil Filtra la visualizzazione della velocità a display e su tools di acquisizione
Kstune Valore digitale di tensione per riconoscimento della posizione iniziale
7.8 PARAMETRI COMMUNICATION
RS485 Modbus RTU Baud rate Velocità di comunicazione:
- 0 = 9600, - 1 = 19200, - 2 = 38400, - 3 = 57600, - 4 = 115200 bps.
Address Rappresenta l’indirizzo Modbus della porta di comunicazione.

ICE Drive Service Manual
58
88 MMAAPPPPAA DDII MMEEMMOORRIIAA IICCEE 8.1 MAPPA DI MEMORIA
Questo capitolo fornisce le informazioni per l’interfacciamento Modbus tramite porta RS485. Indirizzi e significati delle varie funzioni e comandi sono sotto riportati. Tutti gli indirizzi sono espressi in formato esadecimale. I parametri in grigio sono parametri riservati o non utilizzati. R = Read Only W = Write Only RW = Read/Write UNS = Unsigned SGN = Signed WP = Write protect in running SV = Parameter used only for V/Hz mode SP = Parameter used only for (SSP or SSP-IPM) control
8.2 AREA PARAMETRI
ID Modbus
Addr. FC3-FC16
Nome Unita’ Proprieta’ Descrizione
0 0x0000 Cks - R Parametri Checksum 1 0x0001 Ian 1/10 A RW – UNS - WP Corrente nominale 2 0x0002 Imax 1/10 A RW – UNS - WP Corrente massima
3 0x0003 Uln V RW – UNS – WP-
SV Tensione nominale del motore
4 0x0004 Fnl Hz RW – UNS – WP-
SV Frequenza nominale del motore
5 0x0005 Fmax 1/10 Hz RW – UNS - WP-SV Frequenza massima 6 0x0006 Fmin 1/10 Hz RW – UNS – WP Frequenza minima per consentire il pwm 7 0x0007 Nn rpm RW – UNS – WP Velocità nominale
8 0x0008 Nmax rpm RW – UNS – WP-
SP Velocità massima
9 0x0009 CosPhi 1/100 CosPhi 10 0x000A Poles - RW – UNS - WP Numero di poli
11 0x000B Rs 1/100 Ohm
RW – UNS – WP-SP
Resistenza di fase statorica
12 0x000C SpeedMin Hz-Rpm
RW – UNS Minima velocità inpostabile
13 0x000D Tmax 1/10 Nm
RW – UNS-SP Limite di coppia per il controllo SSP-IPM
14 0x000E Lm mH -
15 - - - - - 16 0x0010 ACC 1/10 s RW – UNS Tempo di accelerazione 17 0x0011 DEC 1/10 s RW – UNS decelerazione 18 0x0012 TImax s RW – UNS I^2t limite di tempo
19 0x0013 msr 1/10 Hz Rpm
RW – UNS Velocità minima di movimento
20 0x0014 T_cong - 21 0x0015 S_cong - 22 0x0016 R1_memo - RW – UNS - WP Memoria di rif.1 R1 (0-65535) 23 0x0017 V0 % RW – UNS-SV V/f tensione di boost 24 0x0018 V1 % RW – UNS - WP-SV V/f setup di boost 25 0x0019 Tbrake 1/100 s RW – UNS 26 0x001A Ftw - RW – UNS Banda passante dell’osservatore di

ICE Drive Service Manual
59
ID Modbus
Addr. FC3-FC16
Nome Unita’ Proprieta’ Descrizione
velocità 27 0x001B KSlip -
28 0x001C Type - RW – UNS - WP
Tipi di controllo: 0=SVC (V/F controllo per motori asincroni) 1=FVC 2=SB 4=SSP (controllo Sensorless per motori SuPremE) 5=SSP-IPM (controllo Sensorless per motori SuPremE con magneti permanenti)
29 0x001D PWM 1/1000 KHz
RW – UNS - WP
PWM selezioni di frequenza 2 2 kHz 2,010 2 kHz +random 4,000 4 kHz 4,010 4 kHz+ random 8,000 8 kHz 8,010 8 kHz+ random
30 0x001E - - -
31 0x001F Setup - RW – UNS - WP
Selezioni dei comandi a Bit Da ingresso digitale/analogico (HW00) o RS232/SPI (SW=1) fonte :
- LSB: Drive ON - ENABLE REFERENCE 1 - CW/CCW - ENABLE REFERENCE 2 - Reset - Speed/Torque - Reference 1 - Reference 2 - Motopotentiometer - N.U. - AN1 type (0-10V or 4-20 mA) - N.U. - N.U. - N.U. - N.U. - MSB: N.U.
32 0x0020 Setup2 - RW – UNS - WP
Altre selezioni di comandi a Bit - LSB:l2Talarm or speed reduction
(only for SVC) - N.U. - N.U. - Thermal probe (IGBT and board)
alarm or speed reduction
33 0x0021 Size - R – UNS - WP Inverter Size Questo parametro è bloccato (evidenziato in rosso)
34 0x0022 Jog1 1/100
Hz RW – SGN
JOG1 Speed (Hz può essere aggiunto al riferimento di velocità)
35 0x0023 Jog2 1/100
Hz RW – SGN
JOG2 Speed (Hz può essere aggiunto al riferimento di velocità)
36 0x0024 Jog3 1/100
Hz RW – SGN
JOG3 Speed Hz (può essere aggiunto al riferimento di velocità)
37 0x0025 - - -

ICE Drive Service Manual
60
ID Modbus
Addr. FC3-FC16
Nome Unita’ Proprieta’ Descrizione
38 0x0026 - - - 39 0x0027 - - - 40 0x0028 - - - 41 0x0029 - - - 42 0x002A - - - 43 0x002B - - - 44 0x002C Enc_Out inc/rev - 45 0x002D PI_err_thr. 1/10 % RW – UNS 46 0x002E Feedback - 47 0x002F OptType - RW – UNS Scelta del tipo di HW di scheda OPT. 48 0x0030 K_Gain 1/10 RW – UNS
49 0x0031 Off_ DCLink - RW – UNS Usato per sintonizzare il DC-link misurazione (in ADC points)
50 0x0032 Skip f1 Hz-Rpm
RW – UNS Selezione di frequenza skip (vedere param. 68) selezione salto di velocità
51 0x0033 Skip f2 Hz-Rpm
RW – UNS
52 0x0034 Skip f3 Hz-Rpm RW – UNS
53 0x0035 Skip f4 Hz-Rpm
RW – UNS
54 0x0036 Killer - RW – UNS - WP
Configurazione del freno interno (limite di tempo di intervento del circuito frenante, come segue): 0:30ms total time in 60s period 1:100ms total time in 10s period 2:250ms total time in 10s period 3:600ms total time in 10s period 4:1000ms total time in 10s period 5:1500ms total time in 10s period 6:2000ms total time in 10s period 7:3000ms total time in 10s period 8:4000ms total time in 10s period 9:6000ms total time in 10s period
55 0x0037 Vd_comp 1/100 s RW – UNS - WP 56 0x0038 57 0x0039 - - - 58 0x003A - - - 59 0x003B - - - 60 0x003C - - - 61 0x003D - - -
62 0x003E DO3 - 0-11
0= disable (out analogica abilitato) 1= msr 2= Brake 3= speed set reached 4= direction 5= alarm 6= drive thermal warning 7= motor thermal warning 8= drive OK 9=EV IGBT cooling 10=Pre-charge OK
63 0x003F PTC-limit-H ohm RW – UNS Limite inferior di isteresi sul PTC valore limite per Warning and speed reduction. See also value 79.
64 0x0040 - - - 65 0x0041 - - -

ICE Drive Service Manual
61
ID Modbus
Addr. FC3-FC16
Nome Unita’ Proprieta’ Descrizione
66 0x0042 DO1 - 0-11 Come DO3 67 0x0043 DO2 - 0-11 Come DO3
68 0x0044 Bandwidth Hz-Rpm
RW – UNS Isteresi del salto di frequenza
69 0x0045 - - - 70 0x0046 - - - 71 0x0047
72 0x0048 DO1-OPT
[P1 5998.x] - 0-11 Come DO3 + 11= EV Bridbge cooling
73 0x0049 DO2-OPT
[P2 5998.x] - 0-11 Come DO3 + 11= EV Bridbge cooling
74 0x004A PTC_BridgeThr Ohm 0-9500
Valore di soglia in Ohm della sonda termica di tipo PTC oltre cui deve essere attivata l’uscita digitale OPT-Dout1 e/o OPT-Dout2.
75 0x004B 76 0x004C 77 0x004D
78 0x004E PTC-Thr Ohm RW – UNS PTC soglia di valore relative al motore PTC Allarme
79 0x004F PTC-limit Ohm RW – UNS
PTC valore limite per il Warning and speed reduction
80 0x0050 Baudrate bps RW – UNS
Baudrate RS232 Service port for Motion Control Uc 0-9600 1-19200 3-57600 4-115200
82 0x0052 Address - RW-UNS Modbus Address (1-6) . usato dal XIce, attualmente è fissato a 1
83 0x0053 KpI - RW – UNS PI Current Loop 84 0x0054 KiI - RW – UNS 85 0x0055 Kpw - RW – UNS-SP PID Speed Loop 86 0x0056 Kiw - RW – UNS-SP 87 0x0057 Kdw - RW – UNS-SP 88 0x0058 tdw - RW – UNS-SP Filter on Derivative effect on Speed Loop 89 0x0059 Kpflx - RW – UNS-SP PI Flux Loop 90 0x005A Kiflx - RW – UNS-SP … … … .. … 98 0x0062 KPdes - RW – UNS-SP Controllo parametri SSP 99 0x0063 KIdes - RW – UNS-SP Controllo parametri SSP 100 0x0064 Kstune - RW – UNS-SP Controllo parametri SSP 101 0x0065 Iqfilt Hz RW – UNS-SP Controllo parametri SSP 102 0x0066 Ktangle deg RW – UNS-SP Controllo parametri SSP 103 0x0067 KLS - RW – UNS-SP Controllo parametri SSP 104 0x0068 KHS - RW – UNS-SP Controllo parametri SSP 105 0x0069 KHH - RW – UNS-SP Controllo parametri SSP 106 0x006A - - - 107 0x006B Injection - RW – UNS-SP Controllo parametri SSP 108 0x006C max_track - RW – UNS-SP Controllo parametri SSP 109 0x006D Ld_set - RW – UNS-SP Controllo parametri SSP 110 0x006E Kp_track - RW – UNS-SP Controllo parametri SSP

ICE Drive Service Manual
62
ID Modbus
Addr. FC3-FC16
Nome Unita’ Proprieta’ Descrizione
111 0x006F Ki_track - RW – UNS-SP Controllo parametri SSP 112 0x0070 Tauw_fil ms RW – UNS-SP Controllo parametri SSP
113 0x0071 Opt_PTC_Thr Ohm RW-UNS
Valore di soglia in Ohm della sonda termica di tipo PTC sotto cui deve essere disattivata l’uscita digitale OPT-Dout1 e/o OPT-Dout2.
114 0x0072 F1 % RW – UNS – WP-
SV V/f boost setup
115 0x0073 V2 % RW – UNS - WP-SV V/f boost setup 116 0x0074 F2 % RW – UNS - WP-SV V/f boost setup 117 0x0075 V3 % RW – UNS - WP-SV V/f boost setup 118 0x0076 F3 % RW – UNS - WP-SV V/f boost setup 119 0x0077 V4 % RW – UNS - WP-SV V/f boost setup 120 0x0078 F4 % RW – UNS -WP-SV V/f boost setup 121 0x0079 Device Type - R-UNS Codice interno per il tipo di dispositivo … … … .. …
124 0x007C Config UP RW – UNS – WP User program command bit:
- LSB : Enable U.P. 125 0x007D UP Cycle Time % RW – UNS - WP 126 0x007E Aux1 RW – UNS -WP 127 0x007F Aux2 - RW – UNS -WP
8.3 OUTPUT REGISTERS
ID Modbus
Addr. FC3-FC16
Nome Unità Proprietà Descrizione
0 0x2000 Reference 1 - RW - UNS Riferimento di velocità (rif. Nmax) Range: 0÷65535
1 0x2001 Tag1 - RW
2 0x2002 Reference 2 - RW - SGN Riferimento di coppia Range: -32768÷+32767
3 0x2003 Cmd - R - UNS
Comandi del drive (Bit Selection) Bit 0: --- Bit 1: Drive-ON Bit 2: “Reference 1” Enable Bit 3: Direction
0 = CW 1 = CCW
Bit 4: “Reference 2” Enable Bit 5: Alarms Reset Bit 9: Speed/Torque
0 = Speed Control 1 = Torque Control
Bit 10: Load Default Parameters Bit 15: Reboot I.C.E.
4 0x2004 Digital Output - RW - UNS … … … … …
31 0x201F w_cmd_spi - RW
Commando Debug per il controllo del movimento uC Bit 0: Out_cyc 0-15 write selection 0
= written by SPI 1 = written by RS232 port

ICE Drive Service Manual
63
8.4 INPUT REGISTERS
ID Modbus
Addr. FC4
Nome Unità Proprietà Descrizione
0 0x0000 Status - R - UNS
Bit 0: DC-Link OK Bit 1: Drive-ON Bit 2: “Reference 1” Enabled Bit 3: Direction
0 = CW 1 = CCW
Bit 4: “Reference 2” Enabled Bit 5: Min. speed reach. Bit 6: Setpoint Reach Bit 7: Alarm Bit 8: Control Tuning Bit 9: Bit 10: Igbt temp. prewarning Bit 11: Bit 12: General Warning Bit 13: : Torque/Speed Sel.
0 =Speed Control 1 =Torque Control
Bit 14: --- Bit 15: ---
1 0x0001 Alarm - R - UNS
Bit 0: Short circuit Bit 1: Thermal warning Bit 2: Low 24V Bit 3: Power Over-temperature Bit 4: Motor Thermal alarm Bit 5: Min voltage Bit 6: Max voltage Bit 7: Over current Bit 8: Assistance Bit 9: --- Bit 10: Card Thermal Bit 11: Brake thermal alarm Bit 12: Air 4-24mA Bit 13: Param. default (Factory default loaded) Bit 14: --- Bit 15: ---
2 0x0002 Frequency 1/100 Hz
R - SGN
3 0x0003 Speed rpm R – SGN 4 0x0004 Current 1/10 A R – UNS
5 0x0005 Power 1/100 KW
R - SGN Potenza del drive
6 0x0006 Line Volt V R – UNS Valore di linea 7 0x0007 Motor Volt V R – UNS 8 0x0008 DcLink Volt V R – UNS 9 0x0009 IGBT temper. 1/10 °C R – UNS
10 0x000A Motor
Temperature 1/10 °C R – UNS Temperatura motore
11 0x000B Card
Temperature 1/10 °C R – UNS
12 0x000C Tag12 - - 13 0x000D Tag13 - - 14 0x000E Tag14 - - 15 0x000F Tag15 - -

ICE Drive Service Manual
64
ID Modbus
Addr. FC4
Nome Unità Proprietà Descrizione
16 0x0010 Alarm 1 R – UNS
Bit 0: No EEPROM found Bit 1: CKS EEPROM Bit 2: -- Card Failure or Reload Default in case of CKS EEPROM
17 0x0011 Status Drive seq. - R – UNS Status of Drive Startup Sequence
18 0x0012 Status usr seq. - R – UNS Status of User Program Startup Sequence
… … … … ... 63 0x003f
8.5 OUTPUT DISCRETES
In quest’area sono mappati i comandi che possono essere inviati all’azionamento ed è accessibile attraverso il FC 5:
ID Modbus
Addr. FC5
Nome comando Attr. Descrizione
0 0x0000 --- W
1 0x0001 Drive-ON W 0 = Drive Disable 1 = Drive Enable
2 0x0002 Enable Ref. 1 W 0 = Drive Disable 1 = Drive Enable
3 0x0003 Direction W 0 = CW 1 = CCW
4 0x0004 Enable Ref. 2 W 0 = Drive Disable 1 = Drive Enable
5 0x0005 Reset alarms W 1 = Reset Alarms … … … …
9 0x0009 Speed/Torque W 0 = Speed Control 1 = Torque Control
10 0x000A Def. Parameters W 1 = Load Default Parameters … … … … 15 0x000F Reboot I.C.E. W 1 = System Reboot

ICE Drive Service Manual
65
99 AALLLLAARRMMII
9.1 ALLARMI
Il drive ICE dispone di una finestra allarmi completa e dettagliata. Tutti gli allarmi del drive ICE sono esplicitati in modo diretto tramite il supervisore di prodotto XICE nella schermata “Supervision” → “ICEmonitor”. La finestra allarmi che comparirà in XIce sarà quella sotto riportata.
Di seguito elenchiamo tutti gli allarmi presenti Seguirà nel paragrafo 9.2 la relativa descrizione con le azioni da intraprendere per la risoluzione della problematica.
Allarme Descrizione
Short Circuit Corto circuito
Motor Thermal Probe Allarme Ingresso configurato come Thermal Probe (sovratemperatura motore)
Low24V Alimentazione elettronica insufficiente
Power Therm. Al. Sovratemperatura azionamento
Motor Thermal Alarm Superamento della corrente nominale IaN impostata (I2t)
Min Voltage Tensione DC-Link inferiore al valore minimo (410V)
Max Voltage Tensione DC-Link superiore al valore massimo (810V)
Over Current Superamento della corrente Imax del modulo + 5%
Assistance Richiesta di Assistenza Service
Bit 9 Disponibile
Card Thermal Temperatura scheda regolazione e quindi ambiente drive eccessiva
Brake alarm Eccessivo uso della frenatura
Alrm 4-20mA Segnale di riferimento in corrente inferiore alla soglia minima di 4 mA
Param Default Allarme default parameters
Bit 14 Disponibile
Bit 15 Disponibile

ICE Drive Service Manual
66
Eeprom not found Caricamento parametri fallito causa eeprom non riconosciuta
Invalid config Configurazione non valida
Wrong SW version Versione SW errata o non compatibile
SSP config Errore di configurazione in modalità SSP
SSP table Errore di tabella motore in modalità SSP
Motor PTC Allarme soglia PTC motore
Bit 22 Disponibile
Bit 23 Disponibile
Bit 24 Disponibile
Bit 25 Disponibile
Bit 26 Disponibile
Bit 27 Disponibile
Bit 28 Disponibile
Bit 29 Disponibile
Bit 30 Disponibile
Bit 31 Disponibile
9.2 DESCRIZIONE ALLARMI E AZIONI DA INTRAPRENDERE I N ATTIVITÀ DI SERVICE
Short circuit
Indica la presenza di un corto circuito in uscita all’inverter con erogazione istantanea di una corrente elevatissima: tipicamente è causata da un corto circuito fase-fase o fase-terra all’uscita del inverter. Il drive si protegge spegnendo l’IGBT in pochi microsecondi. Azioni: verificare eventuali corti fase-fase o fase-terra in uscita all’inverter verificare integrità dielettrica del motore verificare a multimetro integrità degli IGBT
Motor Thermal Probe
Indica l’intervento di un ingresso digitale configurato come Motor thermal probe : tipicamente, in questo tipo di configurazione, viene collegata la sonda termica clipson del motore all’ingresso digitale che poi si imposta come “Motor thermal probe” Azioni: verificare eventuali fili di segnale scollegati verificare la temperatura reale del motore verificare lo stato (open or closed) della pastiglia termica del motore
Low 24 volt
Alimentazione elettronica insufficiente. Tensione interna 24v DC troppa bassa per il corretto funzionamento del sistema Azioni: verificare con multimetro il valore del 24 V della scheda switching verificare eventuali carichi / device collegati al drive valutando il possibile scollegamento dal drive
NOTA! L’ I C E mette a disposizione un 24 volt DC con disponibilità max di 100mA all’utenza esterna per alimentare eventuali unità e sterne. Il sovraccarico di questa può indurre all’allarme “LOW 24 VOLT”.

ICE Drive Service Manual
67
Power thermal Allarm
Indica che è intervenuta la protezione termica del drive con superamento del limite di temperatura massima permessa agli IGBT (110°C). L’intervento di questo allarme protegge il drive da sovratemperatura Azioni: verificare l’impianto di raffreddamento Verificare il funzionamento corretto dell’elettrovalvole verificare il ciclo di raffreddamento gestito dall’uscita digitale del drive
Motor thermal alarm
Indica il superamento per tempi eccessivi della corrente nominale del motore impostata nel parametro IaN (I2t). Tipicamente il tempo ammesso di superamento della Inom alla corrente massima scritta nel parametro Imax è pari a 10 secondi. Azioni: verificare il ciclo di lavoro del sistema Verificare eventuali problematiche meccaniche che possano causare sovraccarico
Min voltage
Indica che il livello di tensione del DC_link è sceso sotto il valore minimo di 410 Vdc: la lettura di questo allarme può essere filtrata da parametro fino a 1mSec Azioni: verificare l’alimentazione trifase di ingresso drive verificare l’andamento DClink avvalendosi del tools “scope” di ICE
Max voltage
Indica che il livello di tensione del DC_link è salito oltre il valore minimo di 810 Vdc: Azioni: verificare l’alimentazione trifase di ingresso drive verificare l’andamento DClink avvalendosi del tools “scope” di ICE
Over current
Indica che la corrente di lavoro ha superato il valore di <<Imax di taglia + 5%>> (soglia di overcurrent del drive) L’allarme interviene se l’erogazione eccede la massima corrente ammessa dal drive. Azioni: verificare il carico applicato verificare la parametrizzazione dell’inverter verificare la dinamica dell’applicazione verificare l’andamento della corrente avvalendosi del tools “scope” di ICE
Assistance
Problemi hardware, comando di Fault all’accensione o impossibilità di programmazione dei parametri. Azioni: effettuare reboot della scheda tramite spegnimento e accensione sostituzione della scheda di regolazione
BIT 9
Disponibile per future implementazioni
Card thermal
Indica il superamento della massima temperatura ammessa dall’elettronica di controllo (70°C): la lettura viene effettuata a bordo della scheda di regolazione e visualizzata sul supervisore XIce Azioni: verificare la temperatura ambiente del drive verifica della temperatura visualizzata da XIce
Brake alarm
Indica eccessivo uso della resistenza di frenatura dinamica interna al drive. L’allarme interviene a protezione della resistenza quando il tempo reale di intervento della frenatura eccede l’impostazione effettuata nella variabile “Killer” che in caso di resistenza a bordo inverter deve essere impostato a “0”.

ICE Drive Service Manual
68
Azioni: verificare l’alimentazione trifase di ingresso drive verificare l’andamento di alcune grandezze avvalendosi del tools “scope” di ICE (Dc link, current, speed) verificare la dinamica dell’applicazione
Alrm 4-20mA
Interviene se l’ingresso di riferimento selezionato in modalità “4 –20mA” ha una corrente minore di 4mA. Azioni: verificare il trasduttore che genera 4-20mA verificare l’ingresso della scheda di regolazione ICE
Param Default
Errore di caricamento dei parametri con conseguente richiesta della configurazione di default Azioni: verificare la programmazione dell’inverter effettuare ricarica di default
BIT 14
Disponibile per future implementazioni
BIT 15
Disponibile per future implementazioni
Eeprom not found
Eprom non riconosciuta con conseguente caricamento parametri fallito Azioni: effettuare reboot della scheda tramite spegnimento e accensione effettuare ricarica di default verificare la programmazione dell’inverter sostituzione della scheda di regolazione
Invalid config
Indica una configurazione di sistema non valida: tipicamente questo allarme interviene nel controllo SSP quando la size dell’inverter e la tabella del motore non sono compatibili Azioni: verificare la compatibilità di size ICE scelto e il motore SSP in uso
Wrong SW version
Indica incompatibilità di versione software installata nel drive ICE Azioni: verificare software installato
SSP config
Indica la necessità di configurare il sistema SSP associando correttamente la size dell’inverter con il motore in uso. Essendo il sistema SSP un sensorless non è consentita l’associazione di potenza tanto diversa tra inverter e motore in uso. Azioni: verificare la compatibilità di size ICE scelto e il motore SSP in uso
SSP table
Indica la mancanza di tabella di configurazione per pilotare correttamente motore SSP: la tabella in questione viene compilata da apposito programma “Xssp configuration” e scaricata da supervisore XIce Azioni: verificare la compatibilità di size ICE scelto e il motore SSP in uso

ICE Drive Service Manual
69
Motor PTC
Indica il raggiungimento della soglia di allarme espressa in Ohm e scritta nel valore “PTC Threshold”: serve a protezione di eventuale motore dotato di PTC a bordo. Quando il valore di questa PTC collegata a ingresso specifico di ICE supera il valore impostato nel parametro interviene questo allarme. Se il parametro è impostato a “0” la gestione di questo allarme è disabilitata. Azioni: verificare la temperatura reale del motore verificare il valore in Ohm indicato dal supervisore XIce verificare il valore reale della PTC (misurazione con multimetro)
BIT 22-BIT31
Disponibile per future implementazioni
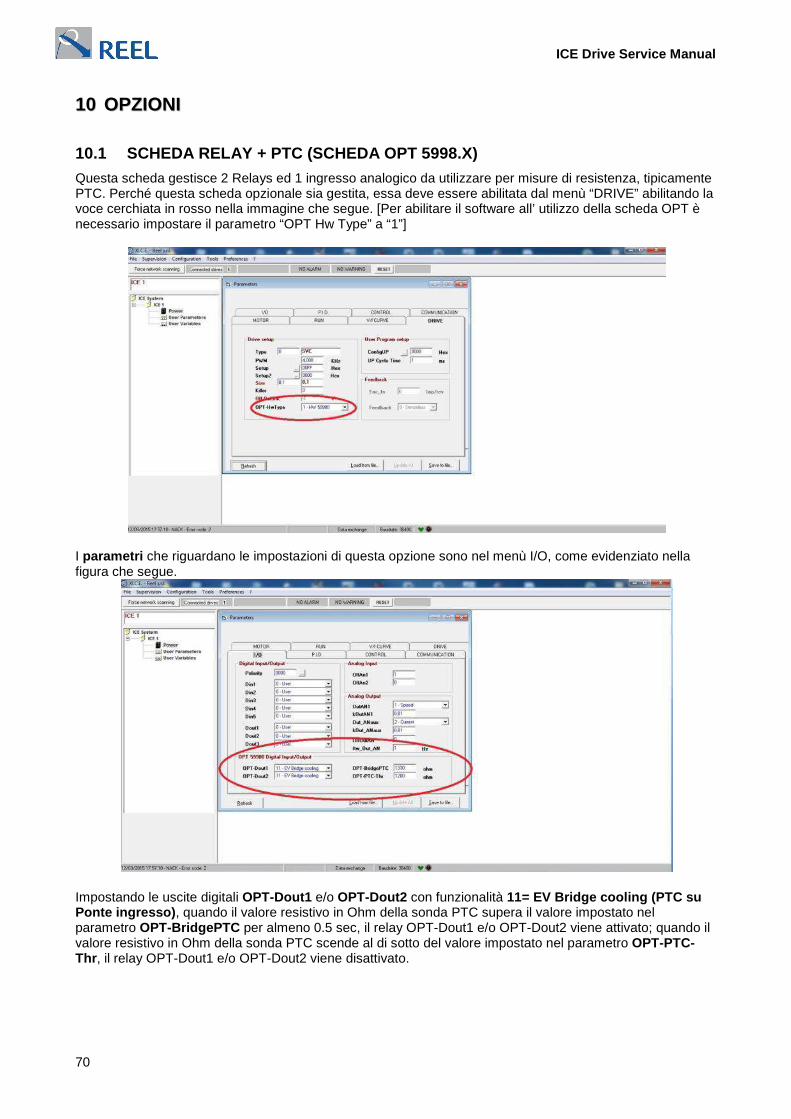
ICE Drive Service Manual
70
1100 OOPPZZIIOONNII
10.1 SCHEDA RELAY + PTC (SCHEDA OPT 5998.X)
Questa scheda gestisce 2 Relays ed 1 ingresso analogico da utilizzare per misure di resistenza, tipicamente PTC. Perché questa scheda opzionale sia gestita, essa deve essere abilitata dal menù “DRIVE” abilitando la voce cerchiata in rosso nella immagine che segue. [Per abilitare il software all’ utilizzo della scheda OPT è necessario impostare il parametro “OPT Hw Type” a “1”]
I parametri che riguardano le impostazioni di questa opzione sono nel menù I/O, come evidenziato nella figura che segue.
Impostando le uscite digitali OPT-Dout1 e/o OPT-Dout2 con funzionalità 11= EV Bridge cooling (PTC su Ponte ingresso) , quando il valore resistivo in Ohm della sonda PTC supera il valore impostato nel parametro OPT-BridgePTC per almeno 0.5 sec, il relay OPT-Dout1 e/o OPT-Dout2 viene attivato; quando il valore resistivo in Ohm della sonda PTC scende al di sotto del valore impostato nel parametro OPT-PTC-Thr , il relay OPT-Dout1 e/o OPT-Dout2 viene disattivato.

ICE Drive Service Manual
71
Parametri: OPT-DOut1: Settaggio Uscita Relay1 OPT. Come D01 + 11= EV Bridge Cooling OPT-DOut2: Settaggio Uscita Relay2 OPT. Come D01 + 11= EV Bridge Cooling OPT-BridgePTC: Attivo solo con OPT-DOut1/2 impostato a 11. Soglia in OHM di attivazione Relay. Attivazione avviene solo se soglia viene superata per almeno 0,5s. Valore massimo letto (in ohm): 9500. OPT-PTC-Thr: Attivo solo con OPT-DOut1/2 impostato a 11. Soglia in OHM di disattivazione Relay. Disattivazione avviene immediatamente dopo il superamento della soglia. Il seguente parametro può essere impostato al massimo al valore: OPT-BridgePTC-100.
10.2 SPECIFICHE E COLLEGAMENTO SCHEDA OPT 5998.X
[P2] Relay 2 -
OPT-Dout2
Input PTC [P1] Relay 1 -
OPT-Dout1

ICE Drive Service Manual
72
Specifiche:
CONNECTOR NAME TYPE RANGE
P1 OPT-Dout1 – NO (Normally Open) 220/230V AC – 1A
P2 OPT-Dout2 – NO (Normally Open) 220/230V AC – 1A
P3 Ingresso Analogico sensore PTC -
Collegamento: La scheda OPT 5998.X va connessa alla scheda di Regolazione 8465.0 sul flat F1 tramite la streep denominata F1-F2. Il verso di inserimento corretto della scheda OPT è indicato dalla corrispondenza delle colonnine di fissaggio con la scheda di regolazione.

ICE Drive Service Manual
73
1111 SSTTOORRIICCOO DDEELL DDOOCCUUMMEENNTTOO
Eseguito da Data Commenti Revisione
S. Griggio 23.03.2013 Prima Versione 2.0
R.Chieu/ M.Liboni 13.03.2015 Aggiunto paragrafo 10.Opzioni
Aggiornati paragrafi “6.5 DRIVE”, “6.6 IO” e “8.2 AREA PARAMETRI”.
2.1
REEL S.r.l. - Via Riviera Berica 40/42/44
36024 Ponte di Nanto (VI) - Italy
www.reel.it