iee proceedings review copy only - missouri university …web.mst.edu/~autosys/papers/008.pdfoptimal...
TRANSCRIPT

Optimal Dynamic Inversion Control Design for a Class of Nonlinear Distributed Parameter Systems with Continuous and Discrete Actuators
Journal: IEE Proc. Control Theory & Applications Manuscript ID: draft
Manuscript Type: Research Paper Date Submitted by the
Author: n/a
Complete List of Authors: Padhi, Radhakant; Indian Institute of Science, Aerospace Engineering Balakrishnan, S.N.; University of Missouri-Rolla, Aerospace Engineering
Keyword: Optimal dynamic inversion, DISTRIBUTED PARAMETER SYSTEMS, TEMPERATURE CONTROL
IEE Proceedings Review Copy Only
Control Theory & Applications

Optimal Dynamic Inversion Control Design for a Class of Nonlinear
Distributed Parameter Systems with Continuous and Discrete Actuators
Radhakant Padhi 1 and S. N. Balakrishnan 2
1Department of Aerospace Engineering, Indian Institute of Science – Bangalore, India 2Department of Mechanical and Aerospace Engineering, University of Missouri – Rolla, USA
Abstract
Combining the principles of dynamic inversion and optimization theory, two stabilizing state
feedback control design approaches are presented for a class of nonlinear distributed parameter systems.
One approach combines the dynamic inversion with variational optimization theory and it can be applied
when there is a continuous actuator in the spatial domain. This approach has more theoretical significance
in the sense that the convergence of the controller can be proved and it does not lead to any singularity in
the control computation as well. The other approach, which can be applied when there are a number of
discrete actuators located at distinct places in the spatial domain, combines dynamic inversion with static
optimization theory. This approach has more relevance in practice, since such a scenario appears naturally
in many practical problems because of implementation concern. These new techniques can be classified
as “design-then-approximate” techniques, which are in general more elegant than the “approximate-then-
design” techniques. However, unlike the existing design-then-approximate techniques, the new
techniques presented here do not demand involved mathematics (like infinite dimensional operator
theory). To demonstrate the potential of the proposed techniques, a real-life temperature control problem
for a heat transfer application is solved, first assuming a continuous actuator and then assuming a set of
discrete actuators.
Keywords: Dynamic inversion, Optimal dynamic inversion, Distributed parameter systems,
Temperature control, Design-then-approximate
1 Asst. Professor, Email: [email protected] , Tel: +91-80-2293-2756, Fax: +91-80-2360-0134 2 Professor, Email: [email protected], Tel: +1-573-341-4675, Fax: +1-573-341-4607
Page 1 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

2
1. Introduction
There are wide class of problems (e.g. heat transfer, fluid flow, flexible structures etc.)
for which a lumped parameter modeling is inadequate and a distributed parameter system (DPS)
approach is necessary. Control design for distributed parameter systems is often more
challenging as compared to lumped parameter systems and it has been studied both from
mathematical as well as engineering point of view. An interesting brief historical perspective of
the control of such systems is found in [Lasiecka]. In a broad sense, existing control design
techniques for distributed parameter systems can be attributed to either “approximate-then-
design (ATD)” or “design-then-approximate (DTA)” categories. An interested reader can refer to
[aBurns] for discussions on the relative merits and limitations of the two approaches.
In the ATD approach the idea is to first come up with a low-dimensional reduced
(truncated) model, which retains the dominant modes of the system. This truncated model (which
is often a finite-dimensional lumped parameter model) is then used to design the controller. One
such potential approach, which has become fairly popular, first comes up with problem-oriented
basis functions using the idea of proper orthogonal decomposition (POD) (through the “snap-
shot solutions”) and then uses those in a Galerkin procedure to come up with a low-dimensional
reduced lumped parameter approximate model (which usually turns out to be a fairly good
approximation). Out of numerous literatures published on this topic and its use in control system
design, we cite [Annaswamy, Arien, Banks, bBurns, Christofides, Holmes, Padhi, Ravindran,
Singh] for reference. For linear systems, such an approach of designing the POD based basis
function leads to the optimal representation of the PDE system in the sense that it captures the
maximum energy of the system with least number of basis functions as compared to any other set
of orthogonal basis functions [Holmes]. For nonlinear systems, however, such a useful result
does not exist.
Even though the POD based model reduction idea has been successfully used for
numerous linear and nonlinear DPS in both linear as well as nonlinear problems, there are a few
important shortcomings in the POD approach: (i) the technique is problem dependent and not
generic; (ii) there is no guarantee that the snap-shot solutions will capture all dominant modes of
the system and, most important, (iii) it is usually difficult to have a set of ‘good’ snap-shot
Page 2 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications
3
solutions for the closed-loop system prior to the control design. This is a serious limiting factor
for applying this technique in the closed-loop control design. Because of this reason, some
attempts are being made in recent literature to adaptively redesign the basis functions (and hence
the controller) in an iterative manner. An interested reader can see [Annaswamy, Arien,
Ravindran] for a few ideas in this regard.
In the DTA approach, on the other hand, the usual procedure is to use infinite
dimensional operator theory to come up with the control design in the infinite dimensional space
first [Curtain]. For implementation purpose, this controller is then approximated to a finite
dimensional space by truncating an infinite series, reducing the size of feedback gain matrix etc.
An important advantage of this approach is that it takes into account the full system dynamics in
designing the controller, and hence, usually performs better [aBurns]. However, to the best of the
knowledge of the authors, these operator theory based DTA approaches are mainly limited to
linear distributed parameter systems [Curtain] and some limited class of problems like spatially
invariant systems [Bameih]. Moreover the mathematics of the infinite dimensional operator
theory is usually involved, which is probably another reason why it has not been able to become
popular among practicing engineers. One of the main contributions of this paper is that it
presents two generic control design approaches for a class of nonlinear distributed parameter
systems, which are based on the DTA philosophy. Yet they are fairly straightforward, quite
intuitive and reasonably simple, making it easily accessible to practicing engineers. The only
approximation needed here is rather the spatial grid size selection for the control
computation/implementation (which can be quite small, since the computational requirements
are very minimal).
In the control design literature for lumped parameter systems, a relatively simple,
straightforward and reasonably popular method of nonlinear control design is the technique of
dynamic inversion (e.g. [Enns], [Lane], [Ngo]), which is essentially based on the philosophy of
feedback linearization [Slotine]. In this approach, first an appropriate coordinate transformation
is carried out to make the system dynamics take a linear form (in the transformed coordinates).
Then linear control design tools are used to synthesize the controller. Even though the idea
sounds elegant, it turns out that this method is quite sensitive to modeling and parameter
inaccuracies, which has been a potential limiting factor for its usage in practical applications for
Page 3 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications
4
quite some time. However, a lot of research has been carried out in the recent literature to
address this critical issue. One way of addressing the problem is to augment the dynamic
inversion technique with the H∞ robust control theory [Ngo]. Another way is to augment this
control with neural networks (trained online) so that the inversion error is cancelled out for the
actual system ([Kim], [McFarland]). With the availability of these augmenting techniques,
dynamic inversion has evolved as a potential nonlinear control design technique.
Using the fundamental idea of dynamic inversion and combining it with the variational
and static optimization theories [Bryson], two formulations are presented in this paper for
designing the control system for one-dimensional control-affine nonlinear distributed parameter
systems. We call this merger as “optimal dynamic inversion” for obvious reasons. Out of the two
techniques presented here, one assumes a continuous actuator in the spatial domain (we call this
as ‘continuous controller’). The other technique assumes a number of actuators located at
discrete locations in the spatial domain (which we call as a ‘discrete controller’). The continuous
controller formulation has a better theoretical significance in the sense that the convergence of
the controller to its steady-state profile can be proved with the evolution of time. In the process,
unlike the discrete controller formulation, it does not lead to any singularity in the required
computations either. On the other hand, the discrete controller formulation has more relevance in
practice in the sense that such a scenario appears naturally in many (probably all) practical
problems (a continuous controller is probably never realizable). To demonstrate the potential of
the proposed techniques, a real-life temperature control problem for a heat transfer application is
solved, applying both the continuous as well as the discrete control design ideas.
A few salient points with respect to the new techniques presented here are as follows.
First, even though the optimization idea is used, the new approach is fundamentally different
from optimal control theory. The main driving idea here is rather dynamic inversion, which
guarantees stability of the closed loop (the rate of decay of the error rather depends on the
selected gain matrix and not on the cost function weights). In addition, this objective is achieved
with a minimum control effort (in a weighted 2L or 2l norm sense), where the cost function
plays an important role in the sense that it not only leads to a minimum control effort, but also
distributes the task among various available controllers (which are located at different locations
in the spatial domain). Second, the technique leads to a state feedback control solution in closed
Page 4 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

5
form (hence, unlike optimal control theory, it does not demand any computationally intensive
procedure in the control computation). Finally, even though they can be classified into DTA
category, the techniques presented do not demand the knowledge of complex mathematical tools
like infinite dimensional operator theory. Hence, we hope that the techniques will be quite useful
to practicing engineers.
2. Problem Description
2.1 System Dynamics with Continuous Controller
In the continuous controller formulation, we consider the following system dynamics
( ) ( ), , , ... , , , ...x f x x x g x x x u′ ′′ ′ ′′= + (1)
where the state ( ),x t y and controller ( ),u t y are continuous functions of time 0t ≥ and spatial
variable [ ]0,y L∈ . x represents /x t∂ ∂ and ,x x′ ′′ represent /x y∂ ∂ , 2 2/x y∂ ∂ respectively. We
assume that appropriate boundary conditions (e.g. Dirichlet, Neumann etc.) are available to make
the system dynamics description Eq.(1) complete. Both ( ),x t y and ( ),u t y are considered to be
scalar functions. The control variable appears linearly, and hence, the system dynamics is in the
control affine form. Furthermore, we assume that the function ( ), , , ...g x x x′ ′′ is bounded away
from zero, i.e. ( ), , , ... 0 ,g x x x t y′ ′′ ≠ ∀ . In this paper, we do not take into account those
situations where control action enters the system dynamics through the boundary actions (i.e.
boundary control problems are not considered).
2.2 System Dynamics with Discrete Controllers
In the discrete controller formulation, we assume that a set of discrete controllers mu are
located at my ( 1, ,m M= ) locations, with the following assumptions:
• The width of the action of the controller located at my is mw .
Page 5 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

6
• In the interval [ ] [ ]/ 2, / 2 0,m m m my w y w L− + ⊂ , the controller ( ),mu t y is assumed to have
a constant magnitude. Outside this interval, 0mu = . However, the interval mw may or
may not be small.
• There is no overlapping of the controller located at my with its neighboring controllers.
• No controller is placed exactly at the boundary, i.e. the control action does not affect the
system through boundary actions.
For this case the system dynamics can be written as follows
( ) ( )1
, , , , , ,M
mm
x f x x x g x x x u=
′ ′′ ′ ′′= +∑ (2)
2.3 Goal for the Controller
The goal for the controller in both continuous and discrete actuator cases is same; i.e. the
controller should make sure that the state variable ( ) ( )*, ,x t y x t y→ as t →∞ for all [ ]0,y L∈ ,
where ( )* ,x t y is a known (possibly time-varying) profile in the domain [ ]0, L , which is
continuous in y and satisfies the spatial boundary conditions.
3. Synthesis of the Controllers
3.1 Synthesis of Continuous Controller
First, we define an output (an integral error) term as follows
( ) ( ) ( ) 2*
0
1 , ,2
Lz t x t y x t y dy = − ∫ (3)
Note that when ( ) 0z t → , ( ) ( )*, ,x t y x t y→ everywhere in [ ]0,y L∈ . Next, following the
principle of dynamic inversion [Enns, Lane, Ngo, Slotine], we attempt to design a controller such
that the following stable first-order equation (in time) is satisfied
Page 6 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

7
0z k z+ = (4)
where, 0k > serves as a gain; an appropriate value of k has to be chosen by the control
designer. To have a better physical interpretation, one may choose ( )1/k τ= , where 0τ > serves
as a “time constant” for the error ( )z t to decay. Using the definition of z from Eq.(3), Eq.(4)
leads to
( )( ) ( )2* * *
0 02L Lkx x x x dy x x dy− − = − −∫ ∫ (5)
Substituting for x from Eq.(1) in Eq.(5) and simplifying we arrive at
( ) ( )
( ) ( ) ( )
*
02
* * *
0 0
, , , ...
where , , , ...2
L
L L
x x g x x x u dy
kx x f x x x x dy x x dy
γ
γ
′ ′′− =
′ ′′ − − − − −
∫
∫ ∫ (6)
Note that the value for ( ),u t y satisfying Eq.(6) will eventually guarantee that ( ) 0z t →
as t →∞ . However, since Eq.(6) is in the form of an integral, there is no unique solution can be
obtained for ( ),u t y from it. To obtain a unique solution, however, we have the freedom of
putting an additional goal. We take advantage of this fact and aim to obtain a solution for ( ),u t y
that will not only satisfy Eq.(6), but at the same time, will also minimize the cost function
( ) ( ) 2
0
1 ,2
LJ r y u t y dy= ∫ (7)
In other words, we wish to minimize the cost function in Eq.(7), subjected to the constraint in
Eq.(6). An implication of choosing this cost function is that the aim is to obtain the control
solution ( ),u t y that will lead to ( ) ( )*, ,x t y x t y→ with minimum control effort. In Eq.(7),
( ) [ ]0, 0,r y y L> ∈ is the weighting function, which needs to be chosen by the control
designer. This weighting function gives the designer the flexibility of putting relative importance
of the control magnitude at different spatial locations. Note that the choice of
Page 7 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

8
( ) [ ]0,r y c y L+= ∈ ∀ ∈R means the control magnitude is given equal importance at all spatial
locations.
Following the technique for constrained optimization [Bryson], we first formulate the
following augmented cost function
( )2 *
0 0
12
L LJ r u dy x x g u dyλ γ = + − − ∫ ∫ (8)
where λ is a Lagrange multiplier, which is a free variable needed to convert the constrained
optimization problem to a free optimization problem. In Eq.(8), we have two free variables,
namely u and λ . We have to minimize J by appropriate selection of these variables.
The necessary condition of optimality is given by [Bryson]
0Jδ = (9)
where Jδ represents the first variation of J . However, we know that
[ ] ( ) ( )
( ) ( )
* *
0 0 0
* *
0 0
L L L
L L
J ru u dy x x g u dy x x g u dy
ru x x g u dy x x g u dy
δ δ λ δ δλ γ
λ δ δλ γ
= + − + − − = + − + − −
∫ ∫ ∫
∫ ∫ (10)
From Eqs.(9) and (10), we obtain
( ) ( )* *
00
Lru x x g u dy x x g u dyλ δ δλ γ + − + − − = ∫ (11)
Since Eq.(11) must be satisfied for all variations uδ and δλ , the followings equations should be
satisfied simultaneously
( )* 0ru x x gλ+ − = (12)
( )*
0
Lx x g u dy γ− =∫ (13)
Page 8 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

9
Note that Eq.(13) is nothing but Eq.(6a). Solving for u from Eq.(12) we get
( )( )*/u r x x gλ= − − (14)
Substituting the above expression for u in Eq.(13) and solving for λ we get
( )2* 2
0
L x x gdy
r
γλ −=
−∫
(15)
Substituting this expression for λ back in Eq.(14), we finally obtain
( )
( ) ( )( )
*
2* 2
0
L
x x gu
x x gr y dy
r y
γ −=
−∫
(16)
As a special case, if ( )r y c += ∈ (i.e. equal weightage is given to the controller at all spatial
locations) and ( ), , , ...g x x x β′ ′′ = ∈R , then Eq.(16) simplifies to
( )( )
*
2*
0
L
x xu
x x dy
γ
β
−=
−∫ (17)
It may be noticed that when ( ) ( )*, ,x t y x t y= (i.e. perfect tracking occurs), there is some
computational difficulty in the sense that a zero seems to appear in the denominator of Eqs.(16-
17), which leads to singularity in the control solution u , i.e. u →∞ . However, even though this
seems to be obvious, it does not happen. To see this, we will show that when ( ) ( )*, ,x t y x t y→ ,
( ) ( )*, ,u t y u t y→ , where ( )* ,u t y is defined as the control required to keep ( ),x t y at ( )* ,x t y
(see Eq.(19)). Before showing this, however, we need a non-trivial expression for ( )* ,u t y . For
that, when ( ) ( )*, ,x t y x t y→ , [ ]0,y L∀ ∈ , from Eq.(1) that we can write
Page 9 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

10
( ) ( )* * * *
* * * * * * * *where , , , , , , ,
x f g u
f f x x x g g x x x
= +
′ ′′ ′ ′′ (18)
From Eq.(18), we can write the control solution as
( )* * **
1,u t y f xg
= − − (19)
Note that the solution ( )* ,u t y in Eq.(19) will always be of finite magnitude, since for the
class of DPS considered here, ( )* * * *, , ,g g x x x′ ′′= is always bounded away from zero. Also
note that in actual implementation of the controller, we may rarely encounter the condition
( ) ( ) [ ]*, , 0,x t y x t y y L= ∀ ∈ , since it is very difficult to meet. However, this expression is useful
in the convergence analysis of the controller. Next, we state and prove the following
convergence result.
Theorem
( ),u t y in Eq.(16) converges to ( )* ,u t y in Eq.(19) when ( ) ( ) [ ]*, , 0,x t y x t y y L→ ∀ ∈ .
Proof:
First we notice that at any point ( )0 0,y L∈ , the control solution in Eq.(16) can be written as
( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( )( ) ( ) ( )
( )
2* * * *0 0 0 0 0
0 2 2*
0 0
2L L
L
kx y x y g y x y x y f y x y dy x y x y dyu y
x y x y g yr y dy
r y
− − − − + − = −
∫ ∫
∫
(20)
We want to analyze this solution for the case when ( ) ( )*, ,x t y x t y= for all [ ]0,y L∈ .
Without loss of generality, we analyze the case in the limit when ( ) ( )*, ,x t y x t y→ , for
[ ] [ ]0 0/ 2, / 2 0, , 0y y y Lε ε ε∈ − + ⊂ → and ( ) ( )*, ,x t y x t y= everywhere else. In such a
limiting case, let us denote ( )0,u t y as ( )0,u t y , which is given by
Page 10 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

11
( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( )( ) ( ) ( )
( )
( ) ( ) ( ) ( ) ( ) ( )
0 0
0 0
0
0
2* * * *2 20 0 0
2 20 2 2*
2
2
* * *0 0 0 0 0 0
, , , , , , , , ,2
,, , ,
, , , , , ,
y y
y y
y
y
kx t y x t y g t y x t y x t y f t y x t y dy x t y x t y dyu t y
x t y x t y g t yr y dy
r y
x t y x t y g t y x t y x t y f t y x
ε ε
ε ε
ε
ε
+ +
− −
+
−
− − − − + − = −
− − − − =
∫ ∫
∫
( ) ( ) ( )
( )( ) ( ) ( )
( )
( ) ( ) ( )
( )
2*0 0 0
2 2*0 0 0
00
*0 0
0
*0
, , ,2
, , ,
1 , ,,
,
kt y x t y x t y
x t y x t y g t yr y
r y
f t y x t yg t y
u t y
ε ε
ε
+ − −
− = −
=
(21)
Moreover, this happens ( )0 0,y L∀ ∈ . Hence ( ) ( ) ( ) ( )* *, , as , ,u t y u t y x t y x t y→ → , [ ]0,y L∀ ∈ .
This completes the proof.
Final Control Solution for Implementation
Combining the results in Eqs.(16) and (17), we finally write the control solution as
( ) ( ) [ ]
( )
( ) ( )( )
* * **
**
2* 2
0
1 , if , , 0,
, otherwiseL
f x x t y x t y y Lg
x x gu
x x gr y dy
r y
γ
− − = ∀ ∈ −= −
∫
(22)
Even though ( ) ( )*, ,u t y u t y→ when ( ) ( ) [ ]*, , 0,x t y x t y y L→ ∀ ∈ , in the numerical
implementation of the controller, it is advisable to exercise the caution as outlined in Eq.(22) to
avoid numerical problems in computer programming.
One can notice in the development of Eq.(22) that there was no need of approximating
the system dynamics to come up with the closed form control solution. However, to
compute/implement the control, there is a requirement for choosing a suitable grid in the spatial
domain. Hence, the technique proposed can be classified into the ‘design-then-approximate’
category. Note that a finer grid can be selected to compute ( )* ,u t y since the only computation
that depends on the grid size in Eq.(22) is a numerical integration, which does not demand
intensive computations.
Page 11 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

12
3.2 Synthesis of Discrete Controllers
In this section we concentrate on the case when we have only a set of discrete controllers
(as described in Section 2.2). In such a case, following the development in continuous
formulation (Section 3.1), we arrive at the following equation
( ) ( ) ( )*
01
, , , ... ,ML
m m mm
x x g x x x u y w dy γ=
′ ′′− =∑∫ (23)
where γ is as defined in Eq.(6b). Expanding Eq.(23), we can write
( ) ( )1
1
11
* *2 21
2 2
MM
MM
w wy y
w w My yx x g dy u x x g dy u γ
+ +
− −
− + + − =
∫ ∫ (24)
For convenience, we define
( )*2
2
, 1, ,m
m
mm
wy
wm yI x x g dy m M
+
−− =∫ … (25)
Then from Eqs.(24) and (25), we can write
1 1 M MI u I u γ+ + = (26)
Eq.(26) will eventually guarantee that ( ) 0z t → as t →∞ . However, note that Eq.(26) is
a single equation with M variables , 1, ,mu m M= … and hence we have infinitely many
solutions. To obtain a unique solution, we aim to obtain a solution that will not only satisfy
Eq.(26), but at the same time will also minimize the following cost function
( )2 21 1 1
12 M M MJ r w u r w u= + + (27)
In other words, we wish to minimize the cost function in Eq.(27), subjected to the constraint in
Eq.(26). An implication choosing this cost function is that we wish to obtain the solution that
will lead to minimum control effort. In Eq.(27), choosing appropriate values for 1, , 0Mr r >…
Page 12 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

13
gives a control designer the flexibility of putting relative importance of the control magnitude at
different spatial locations my , 1, ,m M= … .
Following the principle of constrained optimization [Bryson], we first formulate the
following augmented cost function
( ) ( )2 21 1 1 1 1
1 ...2 M M M M MJ r w u r w u I u I uλ γ= + + + + + − (28)
where λ is a Lagrange multiplier, which is a free variable needed to convert the constrained
optimization problem to a free optimization problem. In Eq.(28) we have λ and
, 1, ,mu m M= … as free variables, with respect to which the minimization has to be carried out.
The necessary condition of optimality [Bryson] leads to the following equations
0, 1, ,m
J m Mu∂
= =∂
… (29)
0Jλ∂
=∂
(30)
Expanding Eqs.(29) and (30) leads to
0, 1, ,m m m mr w u I m Mλ+ = = … (31)
1 1 M MI u I u γ+ + = (32)
Solving for 1, , Mu u… from Eq.(31), substituting those in Eq.(32) and solving for λ we get
( )2
1
/M
m m mm
I r w
γλ
=
−=
∑ (33)
Eqs.(31) and (33) lead to the following expression
Page 13 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

14
( )2
1
/
mm M
m m m m mm
Iur w I r w
γ
=
=
∑, 1, ,m M= … (34)
As a special case, when 1 Mr r= = (i.e. equal important to minimization of all controllers) and
1 Mw w= = (i.e. widths of all controllers are same), we have
22
mm
IuIγ
= (35)
where [ ]1T
MI I I . Note that in case we have a number of controllers being applied over
different control application widths (i.e. , 1, ,mu m M= … are different), we can still use the
simplified formula in Eq.(35), if it leads to satisfactory system response by choosing 1, , Mr r
such that 1 1 M Mr w r w= = .
Singularity in Control Solution and Revised Goal:
From Eqs.(34) and (35), it is clear that when 22 0I → (which happens when all of
1, , 0MI I →… ) and 0γ → , there is a problem of singularity in the control computation in the
sense that mu →∞ (this happens since the denominators of Eqs.(34-35) go to zero faster than the
corresponding numerators). Note that if the number of controllers M is large, probably the
occurrence of such a singularity is a rare possibility, since all of 1, , 0MI I →… simultaneously is
rather a strong condition. Nevertheless such a case may arise during transition. More important,
this issue of control singularity will always arise when ( ) ( )*, ,x t y x t y→ , [ ]0,y L∀ ∈ (which is
the primary goal of the control design). This happens possibly because we have only limited
control authority (controllers are available only in a subset of the spatial domain), whereas we
have aimed to achieve a much bigger goal of tracking the state profile [ ]0,y L∀ ∈ - something
that is beyond the capability of the controllers. Hence whenever such a case arises (i.e. when all
of 1, , 0MI I →… or, equivalently, 2 0I → ), to avoid the issue of control singularity, we
propose to redefine the goal as follows.
Page 14 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

15
First, we define [ ]1, , TMX x x , * * *
1 , ,M
TX x x and the error vector ( )*E X X− . Next,
we aim to design a controller such that 0E → as t →∞ . In other words, we aim to guarantee
that the values of the state variable at the node points ( , 1, ,my m M= … ) track their
corresponding desired values. We do this, we select a positive definite gain matrix K such that:
0E K E+ = (36)
One way of selecting such a gain matrix K is to choose it a diagonal matrix with thm diagonal
element being ( )1/m mk τ= where 0mτ > is the desired time constant of the error dynamics. In
such a case, the thm channel of Eq.(36) can be written as
0m m me k e+ = (37)
Expanding the expressions for me and me and solving for mu ( 1, ,m M= … ), we obtain
( )* *1m m m m m m
m
u x f k x xg
= − − − (38a)
where ( ),m mx x t y , ( )* * ,m mx x t y , ( ),m mf f t y , ( ),m mg g t y (38b)
Final Control Solution for Implementation
Combining the results in Eqs.(34) and (38), we finally write the control solution as
( )
( )
* *2
2
1
1 , if
, otherwise/
m m m m mm
m mM
m m m m mm
x f k x x I tolg
u I
r w I r w
γ
=
− − − < =
∑
(39)
where tol represents a tolerance value. An appropriate value for this tuning variable can be fixed
by the control designer. Note that some discontinuity/jump in the control magnitude is expected
when the switching takes place. However, this jump can be minimized by judiciously selecting a
proper tolerance value.
Page 15 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications
16
One can notice that there was no need of approximating the system dynamics (like
reducing it to a low-order lumped parameter model) to come up with the closed form control
solution in Eq.(39). However, like the continuous controller formulation, to compute/implement
the control, there is a requirement for choosing a suitable grid in the spatial domain. Hence, this
technique can also be classified into the ‘design-then-approximate’ category. In this case too, a
finer grid can be selected to compute , 1, ,mu m M= since the only computation that depends
on the grid size in Eq.(39) is a series of numerical integrations, which do not demand intensive
computations.
4. A Motivating Nonlinear Problem
4.1 Mathematical Model
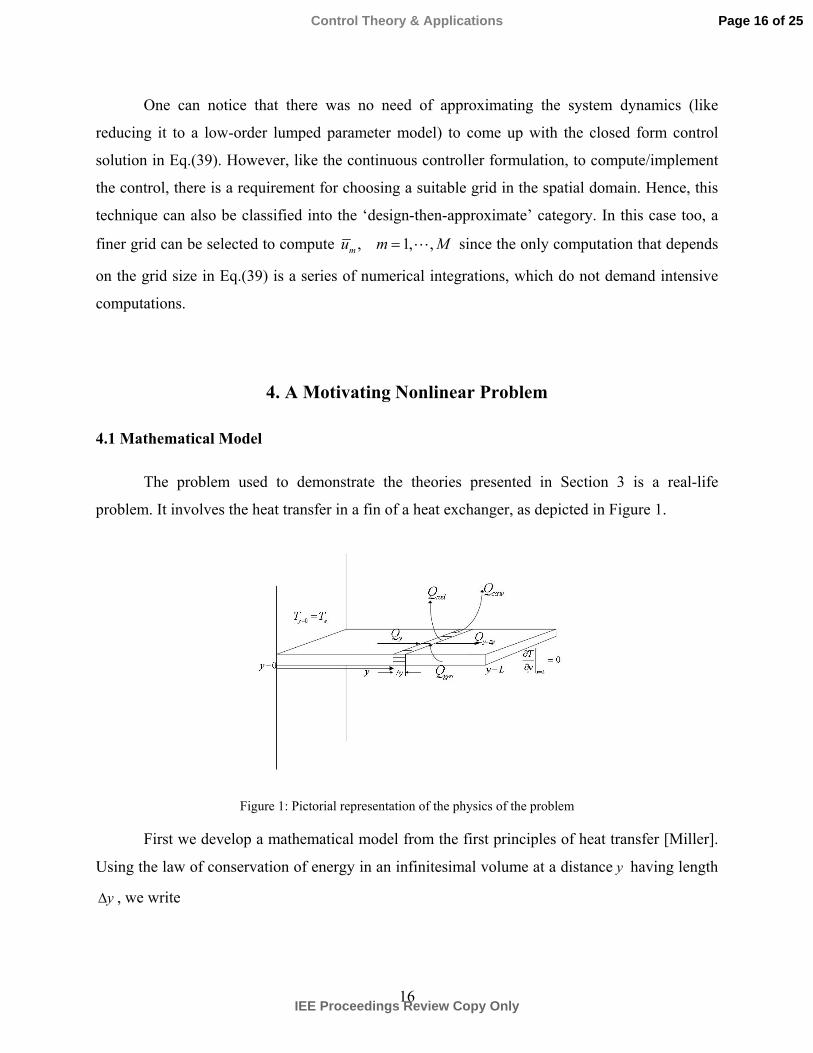
The problem used to demonstrate the theories presented in Section 3 is a real-life
problem. It involves the heat transfer in a fin of a heat exchanger, as depicted in Figure 1.
Figure 1: Pictorial representation of the physics of the problem
First we develop a mathematical model from the first principles of heat transfer [Miller].
Using the law of conservation of energy in an infinitesimal volume at a distance y having length
y∆ , we write
Page 16 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

17
y gen y y conv rad chgQ Q Q Q Q Q+∆+ = + + + (40)
where yQ is the rate of heat conducted in, genQ is the rate of heat generated, y yQ +∆ is the rate of
heat conducted out, convQ is the rate of heat convected out, radQ is the rate of heat radiated out and
chgQ is the rate of heat change. Next, from the laws of physics for heat transfer [Miller], we can
write the following expressions
y
TQ kAy
∂= − ∂
(41a)
genQ S A y= ∆ (41b)
( )1convQ h P y T T∞= ∆ − (41c)
( )2
4 4radQ P y T Tε σ ∞= ∆ − (41d)
chg
TQ C A yt
ρ ∂ = ∆ ∂ (41e)
In Eqs.(41a-e), ( ),T t y represents the temperature (this is the state ( ),x t y in the context
of discussion in Section 3), which is a function of both time t and spatial location y . ( ),S t y is
the rate of heat generation per unit volume (this is the control u in the context of discussion in
Section 3) for this problem. The meanings of various parameters and their numerical values used
and are given in Table 1.
Table 1: Definitions and numerical values of the parameters
Parameter Meaning Numerical value
k Thermal conductivity ( )180 / oW m C
A Cross sectional area 22 cm
P Perimeter 9 cm
h Convective heat transfer coefficient ( )2 05 /W m C
1T∞ Temperature of the medium in the
immediate surrounding of the surface 30 C°
Page 17 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

18
2T∞ Temperature at a far away place in the
direction normal to the surface 40 C− °
ε Emissivity of the material 0.2
σ Stefan-Boltzmann constant 8 2 45.669 10 /W m K−×
ρ Density of the material 32700 /kg m
C Specific heat of the material ( )860 /J kg C°
The values representing of the properties of the material were chosen assuming
Aluminum. The area A and perimeter P have been computed assuming the a fin of dimension
40 4 0.5cm cm cm× × . Note that we have made a one-dimensional approximation for the
dynamics, assuming uniform temperature in the other two dimensions being arrived at
instantaneously.
Using Taylor series expansion and considering a small 0y∆ → , we can write
yy y y
QQ Q y
y+∆
∂ ≈ + ∆ ∂
(42)
Using Eqs.(41a-e) and (42) in Eq.(40) and simplifying, we can write
( ) ( )1 2
24 4
2
1T k T P h T T T T St C y A C C
ε σρ ρ ρ∞ ∞
∂ ∂ = − − + − + ∂ ∂ (43)
For convenience, we define ( )1 /k Cα ρ , ( ) ( )2 /Ph A Cα ρ− , ( ) ( )3 /P A Cα εσ ρ− and
( )1/ Cβ ρ , we can rewrite Eq.(43) as
( ) ( )1 2
24 4
1 2 32
T T T T T T St y
α α α β∞ ∞
∂ ∂= + − + − + ∂ ∂
(44)
Along with Eq.(44), we consider the following boundary conditions
0 , 0y w
y L
TT Ty=
=
∂= =
∂ (45)
Page 18 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

19
where wT is the wall temperature. We have assumed insulated boundary condition at the tip with
the assumption that either there is some physical insulation at the tip or the heat loss at the tip
due to convection and radiation is negligible (mainly because of its low surface area). The goal
for the controller was to make sure that the actual temperature profile ( ) ( )*,T t y T y→ , where
we chose ( )*T y to be a constant (with respect to time) temperature profile. ( )*T y was
generated by using the following expression
( ) ( )* y
w w tipT y T T Tζ−
= + − (46)
In Eq.(46) we chose the wall temperature 0150wT C= , fin tip temperature 0130tipT C= and the
decaying parameter 20ζ = . The selection such a ( )*T y from Eq.(46) was motivated by the fact
that it leads to a smooth continuous temperature profile across the spatial dimension y . This
selection of ( )*T y satisfies the boundary condition at 0y = exactly and at y L=
approximately, with a very small (rather negligible) approximation error. Note that the system
dynamics is in control-affine form and ( ), , , 0g x x x β′ ′′ = ≠ . Moreover, there is no boundary
control action. This is compatible with the class of DPS for which we have developed the control
synthesis theories in Section 3.
In the discrete controller case, the system dynamics in Eq.(44) will get modified to
( ) ( )1 2
24 4
1 2 321
M
mm
T T T T T T St y
α α α β∞ ∞=
∂ ∂= + − + − + ∂ ∂
∑ (47)
However, the boundary conditions remain same as in Eq.(45).
4.2 Synthesis of Continuous Controller
In our simulation studies with the continuous controller formulation, we selected the
control gain as 1/k τ= , where 30 secτ = . We assumed ( )r y as a constant c +∈ , and hence,
were able to use the simplified formula for the control in Eq.(17). Hence a numerical value for
( )r y was not necessary for the simulation studies.
Page 19 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

20
First we chose an initial condition (profile) for the temperature as obtained from the
expression ( ) ( )0, 0,mT y T x y= + , where 0150mT C= (a constant value) serves as the mean
temperature and ( )0,x y represents the deviation from mT . Taking 50A = we computed ( )0,x y
as ( ) ( ) ( ) ( )0, / 2 / 2 cos 2 /x y A A y Lπ π= + − + . Applying the controller as synthesized in
Eq.(22), we simulated the system in Eqs.(44)-(45) from time 0 0t t= = to 5minft t= = . The
results obtained are as in Figure 2(a,b). We can see from Figure 2(a) that the goal of tracking
( )*T y is met without any problem. The associated control (rate of energy input) profile ( ),S t y
obtained is as shown in Figure 2(b). It is important to note that even as ( ) ( )*,T t y T y→ , there
is no control singularity. In fact the control profile develops (converges) towards the steady-state
control profile (see Eq.(19)).
Figure 2(a): Evolution of the temperature (state)
profile from a sinusoidal initial condition
Figure 2(b): Rate of energy input (control) for the
evolution of temperature profile in Figure 2(a)
Next, to demonstrate that similar results will be obtained for any arbitrary initial
condition of the temperature profile ( )0,T y , we considered a number of random profiles for
( )0,T y and carried out the simulation studies. The random profiles using the relationship
( ) ( )0, 0,mT y T x y= + , where ( )0,x y was generated using the concept of Fourier Series, such
that it satisfies ( ) 2 2
1 max0,x y k x≤ , ( ) 2 2
2 max0,x y k x′ ′≤ and ( ) 2 2
3 max0,x y k x′′ ′′≤ . The values for
maxx ,
maxx′ and
maxx′′ were computed using an envelope profile ( ) ( )sin /envx y A y Lπ= . The
Page 20 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications
21
norm used is the 2L norm defined by ( )( )1/ 22
0
Lx x y dy∫ . We selected the value of parameter A
as 50 and selected 1 2k = , 2 3 10k k= = . For more details about the philosophy of generation of
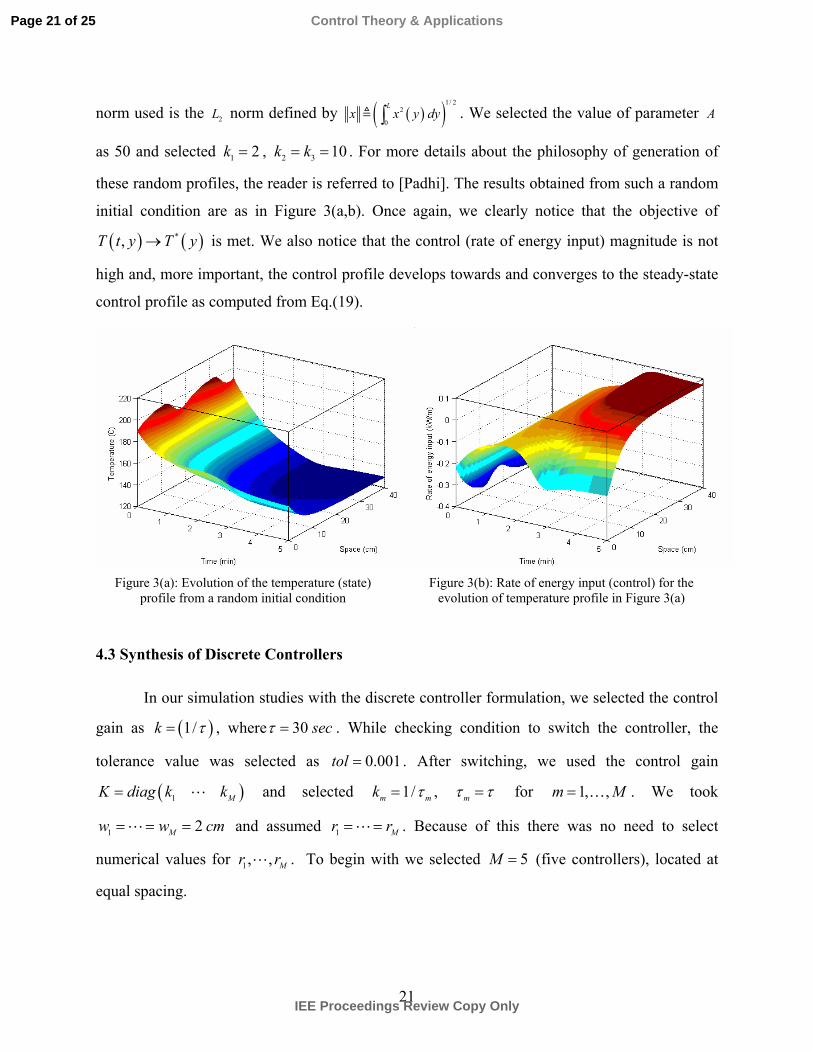
these random profiles, the reader is referred to [Padhi]. The results obtained from such a random
initial condition are as in Figure 3(a,b). Once again, we clearly notice that the objective of
( ) ( )*,T t y T y→ is met. We also notice that the control (rate of energy input) magnitude is not
high and, more important, the control profile develops towards and converges to the steady-state
control profile as computed from Eq.(19).
Figure 3(a): Evolution of the temperature (state)
profile from a random initial condition
Figure 3(b): Rate of energy input (control) for the
evolution of temperature profile in Figure 3(a)
4.3 Synthesis of Discrete Controllers
In our simulation studies with the discrete controller formulation, we selected the control
gain as ( )1/k τ= , where 30 secτ = . While checking condition to switch the controller, the
tolerance value was selected as 0.001tol = . After switching, we used the control gain
( )1 MK diag k k= and selected 1/m mk τ= , mτ τ= for 1, ,m M= … . We took
1 2Mw w cm= = = and assumed 1 Mr r= = . Because of this there was no need to select
numerical values for 1, , Mr r . To begin with we selected 5M = (five controllers), located at
equal spacing.
Page 21 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications
22
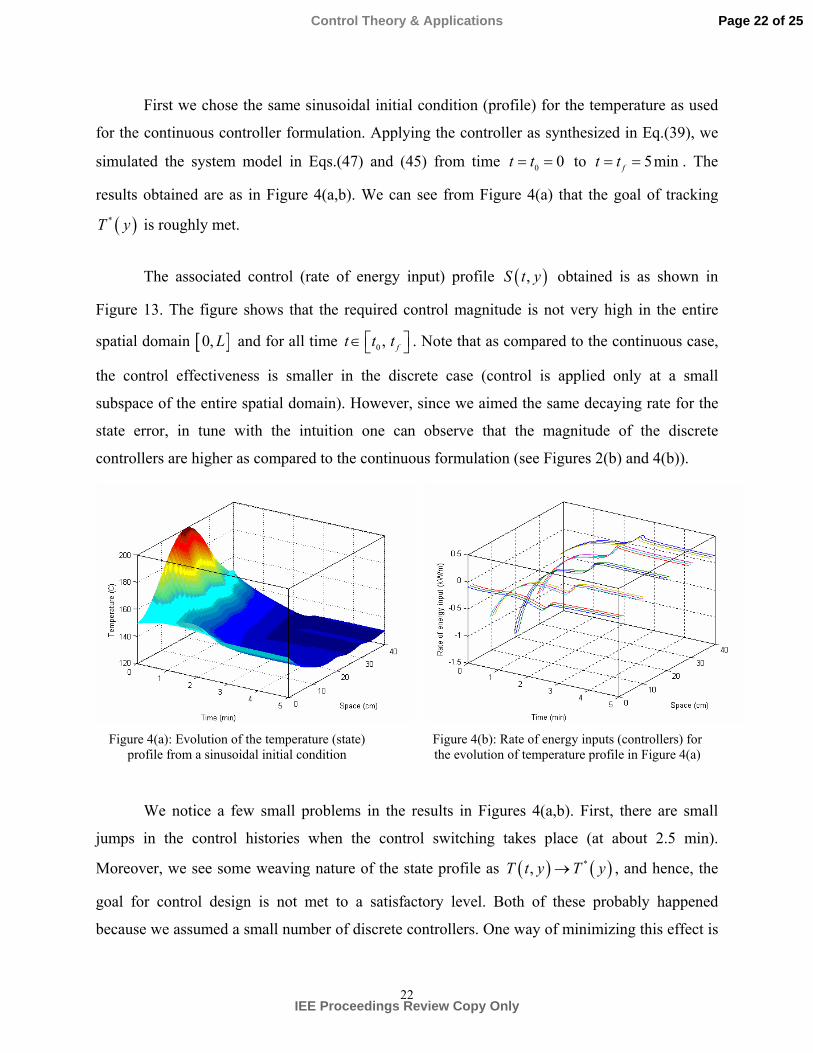
First we chose the same sinusoidal initial condition (profile) for the temperature as used
for the continuous controller formulation. Applying the controller as synthesized in Eq.(39), we
simulated the system model in Eqs.(47) and (45) from time 0 0t t= = to 5minft t= = . The
results obtained are as in Figure 4(a,b). We can see from Figure 4(a) that the goal of tracking
( )*T y is roughly met.
The associated control (rate of energy input) profile ( ),S t y obtained is as shown in
Figure 13. The figure shows that the required control magnitude is not very high in the entire
spatial domain [ ]0, L and for all time 0 , ft t t ∈ . Note that as compared to the continuous case,
the control effectiveness is smaller in the discrete case (control is applied only at a small
subspace of the entire spatial domain). However, since we aimed the same decaying rate for the
state error, in tune with the intuition one can observe that the magnitude of the discrete
controllers are higher as compared to the continuous formulation (see Figures 2(b) and 4(b)).
Figure 4(a): Evolution of the temperature (state)
profile from a sinusoidal initial condition
Figure 4(b): Rate of energy inputs (controllers) for the evolution of temperature profile in Figure 4(a)
We notice a few small problems in the results in Figures 4(a,b). First, there are small
jumps in the control histories when the control switching takes place (at about 2.5 min).
Moreover, we see some weaving nature of the state profile as ( ) ( )*,T t y T y→ , and hence, the
goal for control design is not met to a satisfactory level. Both of these probably happened
because we assumed a small number of discrete controllers. One way of minimizing this effect is
Page 22 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

23
to increase the number of controllers. Next, we selected ten controllers (instead of five) and
carried out the simulation again. The results are shown in Figure 5(a,b). It is quite clear from this
figure that the weaving nature is substantially smaller and the goal ( ) ( ) [ ]*, , 0,T t y T y y L→ ∀ ∈
is met with more accuracy. Also note that as compared to the case with five controllers, here the
control effectiveness is higher and subsequently the magnitudes of the controllers are smaller
(compare Figures 4(b) and 5(b)).
Figure 5(a): Evolution of the temperature (state)
profile from a sinusoidal initial condition
Figure 5(b): Rate of energy inputs (controllers) for the
evolution of temperature profile in Figure 5(a)
To demonstrate that similar results will be obtained for any arbitrary initial condition of
the temperature profile ( )0,T y , next we considered a number of random profiles for ( )0,T y
(generated the same way as in Section 4.2) and carried out the simulation studies. The results
obtained from such a random initial condition are quite satisfactory in the sense that the tracking
objective was met. To contain the length of the paper, however, we do not include those results.
5. Conclusions
Based on the newly proposed optimal dynamic inversion theory, two stabilizing state
feedback control design approaches are presented for a class of nonlinear distributed parameter
systems. One approach combines the dynamic inversion with variational optimization, whereas
Page 23 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

24
the other one (which is more relevant in practice) can be applied when there are a number of
discrete actuators located at distinct places in the spatial domain. These new techniques can be
classified as “design-then-approximate” methods, which are in general more elegant than the
“approximate-then-design” methods. The formulation leads to a closed form control solution,
and hence, is not computationally intensive. To demonstrate the potential of the proposed
techniques, a real-life temperature control problem for a heat transfer application is solved, first
assuming a continuous actuator and then assuming a set of discrete actuators and promising
numerical results are obtained.
References
1. Annaswamy A., Choi J. J., Sahoo D., Active Closed Loop Control of Supersonic Impinging Jet Flows
Using POD Models, Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas,
2002.
2. Arian E., Fahl M. and Sachs E. W., Trust-region Proper Orthogonal Decomposition for Flow Control,
NASA/CR-2000-210124, ICASE Report No. 2000-25.
3. Bameih B., The Structure of Optimal Controllers of Spatially-invariant Distributed Parameter
Systems. Proceedings of the Conference on Decision & Control, 1997, 1056-1061.
4. Banks H. T., Rosario R. C. H and Smith R. C., Reduced-Order Model Feedback Control Design:
Numerical Implementation in a Thin Shell Model, IEEE Transactions on Automatic Control, Vol. 45,
2000, 1312-1324.
5. Bryson A. E. and Ho Y. C., Applied Optimal Control, London: Taylor and Francis, 1975.
6. aBurns J.A. and King, B.B., Optimal sensor location for robust control of distributed parameter
systems. Proceedings of the Conference on Decision and Control, 1994, 3967- 3972.
7. bBurns J. and King B. B., A Reduced Basis Approach to the Design of Low-order Feedback
Controllers for Nonlinear Continuous Systems, Journal of Vibration and Control, Vol.4, 1998, 297-
323.
8. Christofides P. D., Nonlinear and Robust Control of PDE Systems – Methods and Applications to
Transport-Reaction Processes, Birkhauser , Boston, 2000.
Page 24 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications

25
9. Curtain R. F. and Zwart H. J., An Introduction to Infinite Dimensional Linear Systems Theory,
Springer-Verlag, New York, 1995.
10. Enns, D., Bugajski, D., Hendrick, R. and Stein, G., Dynamic Inversion: An Evolving Methodology
for Flight Control Design, International Journal of Control, Vol.59, No.1,1994, pp.71-91.
11. Holmes P., Lumley J. L. and Berkooz G., Turbulence, Coherent Structures, Dynamical Systems and
Symmetry, Cambridge University Press, 1996, 87-154.
12. Kim, B. S. and Calise, A. J., “Nonlinear Filight Control using Neural Networks”, AIAA Journal of
Guidance, Control, and Dynamics, Vol. 20, No. 1, 1997, pp.26-33.
13. Lasiecka I., Control of Systems Governed by Partial Differential Equations: A Historical Perspective,
Proceedings of the 34th Conference on Decision and control, 1995, 2792-2796.
14. Lane, S. H. and Stengel, R. F., Flight Control Using Non-Linear Inverse Dynamics, Automatica,
Vol.24, No.4, 1988, pp.471-483.
15. McFarland, M. B., Rysdyk, R. T., and Calise A. J., “Robust Adaptive Control Using Single-Hidden-
layer Feed-forward Neural Networks,” Proceeding of the American Control Conference, 1999, pp.
4178-4182.
16. Miller A. F., Basic Heat and Mass Transfer, Richard D. Irwin Inc., MA, 1995.
17. Ngo, A. D., Reigelsperger, W. C. and Banda, S. S., Multivariable Control Law Design for A Tailless
Airplanes, Proceedings of the AIAA Conference on Guidance, Navigation and Control, 1996, AIAA-
96-3866.
18. Padhi R. and Balakrishnan S. N., Proper Orthogonal Decomposition Based Optimal Neurocontrol
Synthesis of a Chemical Reactor Process Using Approximate Dynamic Programming, Neural
Networks, Vol. 16, 2003, pp. 719-728.
19. Ravindran S. S., Adaptive Reduced-Order Controllers for a Thermal Flow System Using Proper
Orthogonal Decomposition, SIAM Journal on Scientific Computing, Vol.23, No.6, 2002, pp.1924-
1942.
20. Slotine, J-J. E. and Li, W., Applied Nonlinear Control, Prentice Hall, 1991.
Page 25 of 25
IEE Proceedings Review Copy Only
Control Theory & Applications