ieice communications express, vol.6, no.2, 65 low ... letter assumes a dl-mu-mimo-ofdm system in...
TRANSCRIPT

Low complexity non-linearpre-coding on downlinkmultiuser MIMO systems
Tomoki Murakamia), Koichi Ishihara, Hirantha Abeysekera,Yasushi Takatori, and Masato MizoguchiNTT Access Network Service Systems Laboratories, Nippon Telegraph and
Telephone Corporation, 1–1 Hikarinooka, Yokosuka, Kanagawa 239–0847, Japan
Abstract: This paper proposes low complexity non-linear pre-coding that
switching among pre-coding weights per orthogonal frequency division
multiplexing (OFDM) symbol according to the modulation scheme and
constellation point of users, for downlink multiuser multiple input multiple
output (DL-MU-MIMO) systems. In the proposed pre-coding, when some
users have the same modulation scheme and constellation point, the pre-
coding weight is calculated based on broadcast approach without inter-user
interference cancellation. If not, the pre-coding weight is calculated based on
unicast approach such as the zero-forcing (ZF) method. In addition, com-
puter simulation results show that the proposed pre-coding achieves lower bit
error rate (BER) on low signal to noise ratio (SNR) environments.
Keywords: downlink multiuser multiple input multiple output (DL-MU-
MIMO), non-linear pre-coding, wireless LAN system
Classification: Wireless Communication Technologies
References
[1] Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY)Specifications, IEEE Std. 802.11ac-2013.
[2] 3GPP TS 36.913, “Evolved Universal Terrestrial Radio Access (E-UTRA);Requirements for further advancements for Evolved Universal Terrestrial RadioAccess (EUTRA) LTE-Advanced”.
[3] H. Spencer, C. B. Peel, A. L. Swindlehurst, and M. Haardt, “An introductionto the multi-user MIMO downlink,” IEEE Commun. Mag., vol. 42, no. 10,pp. 60–67, Oct. 2004. DOI:10.1109/MCOM.2004.1341262
[4] R. Fischer, C. Windpassinger, A. Lampe, and J. Huber, “Space time transmissionusing Tomlinson-Harashima precoding,” Proc. 4th ITG Conf. Source ChannelCoding, Berlin, Germany, Jan. 2002, pp. 139–147.
[5] C. Peel, B. Hochwald, and L. Swindlehurst, “Avector-perturbation technique fornear-capacity multi-antenna multi-user communication,” Proc. 41st AllertonConf. Communication, Control, Computing, IL, Oct. 1–3, 2003.
© IEICE 2017DOI: 10.1587/comex.2016XBL0177Received October 3, 2016Accepted October 24, 2016Publicized November 15, 2016Copyedited February 1, 2017
65
IEICE Communications Express, Vol.6, No.2, 65–70

1 Introduction
In order to achieve high-speed and high-efficiency wireless transmission, downlink
multiuser multiple input multiple output (DL-MU-MIMO) transmission is adopted
in IEEE 802.11ac [1] and 3GPP long term evolution (LTE) advanced [2]. In DL-
MU-MIMO systems, base station (BS) simultaneously transmits to multiple users
on the same frequency channel while using pre-coding techniques to mitigate inter-
user interference [3]. Especially, it is expected that DL-MU-MIMO transmission
can improve total throughput in practical environments where most users will
utilize just a few antennas for compactness and low cost.
Maximizing the channel capacity of DL-MU-MIMO transmission demands
propagation environments with high signal to noise ratios (SNRs) between BS and
user antennas and low spatial correlation between user antennas. Therefore, it is
important to improve DL-MU-MIMO transmission in practical environments
including those with low SNR values and high spatial correlation. In order to
realize these improvements, non-linear pre-coding techniques such as Tomlinson-
Harashima precoding (THP), vector perturbation (VP), have been investigated in
[4, 5]. However, it is known that accurate channel state information (CSI) and large
computing resources are required which complicates practical realization.
In this letter, we propose low complexity non-linear pre-coding for DL-MU-
MIMO systems in low SNR conditions. In the proposed pre-coding, several pre-
coding weights, generated to suit modulation schemes and constellation points of
users, are activated for different orthogonal frequency division multiplexing
(OFDM) symbol. By applied a limited number of pre-coding weights to each
OFDM symbol, computational complexity is suppressed from that incurred by non-
linear pre-coding techniques. Our computer simulation results clarify the effective-
ness of DL-MU-MIMO with the proposed pre-coding by comparing it to conven-
tional pre-coding on low SNR conditions.
2 System model
This letter assumes a DL-MU-MIMO-OFDM system in which transmitter (TX)
transmits to N receivers (RXs). TX has M antennas while each RX has single
antenna. hnðkÞ denotes CSI of the kth (k ¼ 1 . . .K) subcarrier between TX and RX-n
(n ¼ 1 . . .N). The received signals at RX-n, ynðkÞ, are expressed by the transmit
signal, x1ðkÞ � xNðkÞ, as
ynðkÞ ¼ hnðkÞwnðkÞxnðkÞ þXN
l¼1;l≠nhlðkÞwlðkÞxlðkÞ þ nnðkÞ; ð1Þ
where wnðkÞ is the pre-coding weight of DL-MU-MIMO for RX-n, and nnðkÞ is anadditive white Gaussian noise vector with variance of �2. For DL-MU-MIMO
transmission, we assume that equal power is allocated to each RX because each RX
will demand the same communication quality. In addition, for practical use, the pre-
coding weight equivalent to the conventional pre-coding case, wnCðkÞ, is calculated
by channel inversion based on zero-forcing (ZF) [3], which is a low complexity
weight calculation method expressed by© IEICE 2017DOI: 10.1587/comex.2016XBL0177Received October 3, 2016Accepted October 24, 2016Publicized November 15, 2016Copyedited February 1, 2017
66
IEICE Communications Express, Vol.6, No.2, 65–70

wCn ðkÞ ¼
w0Cn ðkÞ
kw0Cn ðkÞkF
; ð2Þ
w0C1 ðkÞ � � � w0C
n ðkÞ � � � w0CN ðkÞ� � ¼ HCðkÞHðHCðkÞHCðkÞHÞ�1; ð3Þ
where kAkF is the Frobenius norm of A, and HCðkÞ is expressed as
HCðkÞ ¼ h1ðkÞT � � � hnðkÞT � � � hNðkÞT� �T
; ð4Þwhere AT is the transpose operator of A.
3 Low complexity non-linear pre-coding
This section explains the proposed low complexity non-linear pre-coding for DL-
MU-MIMO transmission. Its chief characteristic is to assume that the modulation
schemes and constellation points of users in low SNR environments are likely to be
the same. In the proposed pre-coding, several pre-coding weights, derived accord-
ing to modulation schemes and constellation points of users, are switched for each
OFDM symbol. Fig. 1 shows an example of the proposed pre-coding using BPSK
and two users. As shown in Fig. 1(b), when a user set with the same modulation
scheme and constellation point exists, the pre-coding weight is calculated based on
broadcast without inter-user interference cancellation. In order to improve channel
capacity, the pre-coding weight on broadcast, wbBðkÞ, defines as
wBb ðkÞ ¼ VðNÞðkÞ�v1ðkÞ; ð5Þ
where b (b ¼ 1; . . . ; B) denotes the user index with the same modulation scheme
and constellation point and VðNÞðkÞ is the matrix combined from right singular
vectors on null space of matrix HBðkÞ including CSI of users with different
modulation schemes and constellation points as calculated by
HBðkÞ ¼ h1ðkÞT � � � huðkÞT � � � hUðkÞT� �T ¼ UðkÞ�ðkÞ VðSÞðkÞ VðNÞðkÞ
� �H;
ð6Þwhere AH denotes the Hermitian transpose operator of A, u (u ¼ 1; . . . ; U) is the
user index for the difference modulation scheme and constellation points, UðkÞ isthe matrix combined from the left singular vectors, �ðkÞ is the diagonal matrix in
which the diagonal elements represent the square roots of the eigenvalues, and
VðSÞðkÞ is the matrix combined from right singular vectors on signal space. �v1ðkÞ isthe right singular vector of maximum eigenvalue as calculated by
�HBðkÞVðNÞðkÞ ¼ h1ðkÞT � � � hbðkÞT � � � hBðkÞT� �T
VðNÞðkÞ¼ �UðkÞ ��ðkÞ �v1ðkÞ � � � �vbðkÞ � � � �vBðkÞ
� �H ; ð7Þ
where �HBðkÞ is the matrix including CSI of users with the same modulation scheme
and constellation points.
On the other hand, another pre-coding weight, wuUðkÞ, is calculated based on
unicast with inter-user interference cancellation such as the ZF method [3]. In this
letter, the pre-coding weight on unicast is calculated by Eq. (8)–(10).
wUu ðkÞ ¼
w0Uu ðkÞ
kw0Uu ðkÞkF
; ð8Þ© IEICE 2017DOI: 10.1587/comex.2016XBL0177Received October 3, 2016Accepted October 24, 2016Publicized November 15, 2016Copyedited February 1, 2017
67
IEICE Communications Express, Vol.6, No.2, 65–70

w0U1 ðkÞ � � � w0U
U ðkÞ w0UUþ1ðkÞ � � � w0U
UþbðkÞ � � � w0UUþBðkÞ
� �¼ HUðkÞHðHUðkÞHUðkÞHÞ�1
; ð9Þ
HUðkÞ ¼�HBðkÞHBðkÞ
" #; ð10Þ
4 Simulation results
This section evaluates the effectiveness of the proposed pre-coding through com-
puter simulation based on the IEEE 802.11ac standard [1]. Table I shows the
simulation parameters. Frequency and bandwidth are 5GHz and 80MHz, respec-
tively. The numbers of TX and RX antennas are from two to four and one,
respectively. The number of RXs runs from two to four matching the number of
TX antennas. Assuming low SNR environments, the modulation scheme is set to
BPSK or QPSK. In addition, we assume that the propagation channel is channel
model B [1] and that SNR ranges from 0 to 20 dB.
Fig. 2 shows the simulation results of DL-MU-MIMO transmission with and
without the proposed pre-coding. First, Fig. 2(a) shows the average bit error rate
Table I. Computer simulation parameters
Frequency 5GHz
Bandwidth 80MHz
Number of TX antennas 2, 3, 4
Number of RX antennas 1
Number of RXs 2, 3, 4
Modulation scheme BPSK, QPSK
(a) Conventional pre-coding.
(b) Proposed pre-coding.
Fig. 1. Concept of the proposed pre-coding.
© IEICE 2017DOI: 10.1587/comex.2016XBL0177Received October 3, 2016Accepted October 24, 2016Publicized November 15, 2016Copyedited February 1, 2017
68
IEICE Communications Express, Vol.6, No.2, 65–70

(BER) performance of the proposed and conventional pre-coding approaches when
SNR varies from 0 to 20 dB. In this simulation, we assume that a TX with two
antennas uses DL-MU-MIMO transmission to transmit to two RXs. Thus BER is
averaged over all RXs. As shown in Fig. 2(a), it can been seen that the proposed
pre-coding by using just two weights offers improvements of 2.5 dB under BPSK
and 1.2 dB under QPSK from the conventional pre-coding at BER ¼ 10�2. This isbecause the received power per RX is increased by using broadcast pre-coding
weight without interference cancellation. Moreover, BPSK offers greater improve-
(a) Average BER versus SNR.
(b) Number of RX versus BER=10-2 improvement performance.
Fig. 2. Computer simulation results
© IEICE 2017DOI: 10.1587/comex.2016XBL0177Received October 3, 2016Accepted October 24, 2016Publicized November 15, 2016Copyedited February 1, 2017
69
IEICE Communications Express, Vol.6, No.2, 65–70

ment QPSK. This is that, BPSK doubles the probability the shared use of
modulation scheme and constellation points compared to QPSK.
Second, we elucidate the impact of the number of RXs. Fig. 2(b) shows the
performance improvements possible with BPSK and QPSK at BER ¼ 10�2 when
the number of RXs ranges from two to four. The number of TX antennas equals the
number of RXs. From the results of Fig. 2(b), we found that BER performance
improvements strengthen with the number of RXs. This is because the probability
of modulation scheme and constellation point sharing is raised by increasing the
number of RXs. Moreover, BPSK offers greater improvement than QPSK as
observed in Fig. 2(a).
5 Conclusion
In this letter, we proposed low complexity non-linear pre-coding for DL-MU-
MIMO systems. The proposed pre-coding switching among several pre-coding
weights for each OFDM symbol according to modulation schemes and constella-
tion points of users. If a set of users adopt the same modulation schemes and
constellation points, the pre-coding weight is calculated based on broadcast
approach without inter-user interference cancellation. On the other hand, if the
set adopt difference modulation schemes and constellation points, the pre-coding
weight is calculated based on the unicast approach with inter-user interference
cancellation. Computer simulations confirmed that the proposed pre-coding offers
improvements of 2.5 dB under BPSK and 1.2 dB under QPSK from conventional
pre-coding at BER ¼ 10�2. Moreover, we clarify that the proposed pre-coding can
achieve further improvements as the number of users is increased.
© IEICE 2017DOI: 10.1587/comex.2016XBL0177Received October 3, 2016Accepted October 24, 2016Publicized November 15, 2016Copyedited February 1, 2017
70
IEICE Communications Express, Vol.6, No.2, 65–70
Experimental evaluation ofinterference reduction effect;Eigen-beamforming anddigital subtraction by usingMIMO-OFDM signals
Yoshiyuki Yamamoto1, Ryota Takahashi2†, Masakuni Tsunezawa2,Naoki Honma2a), and Kentaro Murata31 Faculty of Engineering, Iwate University,
4–3–5 Ueda, Morioka 020–8551, Japan2 Graduate School of Engineering, Iwate University,
4–3–5 Ueda, Morioka 020–8551, Japan3 Graduate School of Engineering, National Defense Academy,
1–10–20 Hashirimizu, Yokosuka, Kanagawa 239–8686, Japan
Abstract: In this letter, we experimentally validate an interference reduc-
tion technique that combines a digital subtraction technique, and eigen-
beam-forming with an end-fire arrangement of linear array antennas. The
eigen-beamforming significantly reduces the self-interference at the cost of
a slight drop in the degrees-of-freedom of the antenna. We experimentally
evaluate the degree of interference reduction using two linear sleeve-dipole
arrays in end-fire arrangement. This experiment uses MIMO (Multiple-Input
Multiple-Output)-OFDM (Orthogonal Frequency Division Multiplexing)
signals to evaluate the realistic performance of this technique. The results
of the experiment show the combination of eigen-beamforming and digital
subtraction can significantly reduce, −76 dB, the interference.
Keywords: full-duplex, interference, beamforming, digital subtraction
Classification: Antennas and Propagation
References
[1] S. Hong, J. Brand, J. Choi, M. Jain, J. Mehlman, S. Katti, and P. Levis,“Applications of self-interference cancellation in 5G and beyond,” IEEECommun. Mag., vol. 52, no. 2, pp. 114–121, Feb. 2014. DOI:10.1109/MCOM.2014.6736751
[2] D. Senaratne and C. Tellambura, “Beamforming for space division duplexing,”Proc. IEEE Int. Conf. Commun., pp. 1–5, Jun. 2011. DOI:10.1109/icc.2011.5962761
[3] N. Li, W. Zhu, and H. Han, “Digital interference cancellation in single channel,full duplex wireless communication,” 2012 8th Int. Conf. Wireless Commun.,
†Ryota Takahashi sadly passed away on 17th Nov. 2016
© IEICE 2017DOI: 10.1587/comex.2016XBL0175Received September 29, 2016Accepted October 25, 2016Publicized November 22, 2016Copyedited February 1, 2017
71
IEICE Communications Express, Vol.6, No.2, 71–76

Networking and Mobile Comput. (WiCOM), pp. 1–4, Sept. 2012. DOI:10.1109/WiCOM.2012.6478497
[4] T. Riihonen and R. Wichman, “Analog and digital self-interference cancellationin full-duplex MIMO-OFDM transceivers with limited resolution in A/Dconversion,” Proc. 46th Asilomar Conf. Signals, Syst. and Comput., pp. 45–49,Nov. 2012. DOI:10.1109/ACSSC.2012.6488955
[5] J. I. Choi, M. Jain, K. Srinivasan, P. Levis, and S. Katti, “Achieving singlechannel, full duplex wireless communication,” Proc. 2010 ACM MobiCom.,pp. 1–12, Sept. 2010. DOI:10.1145/1859995.1859997
[6] M. Jain, J. I. Choi, T. Kim, D. Bharadia, S. Seth, K. Srinivasan, P. Levis, S.Katti, and P. Sinha, “Practical, real-time, full duplex wireless,” Proc. 2011 ACMMobiCom., pp. 301–312, Sept. 2011. DOI:10.1145/2030613.2030647
[7] M. Tsunezawa, N. Honma, K. Takahashi, Y. Tsunekawa, K. Murata, and K.Nishimori, “Interference reduction between SDD linear array antennas usingend-fire arrangement,” 2015 IEEE International Symposium on Antennas andPropagation & USNC/URSI National Radio Science Meeting, pp. 2511–2512,Jul. 2015. DOI:10.1109/APS.2015.7305644
1 Introduction
Full-duplex communication is being studied recently for application to the 5G
wireless network [1]. Full-duplex communication establishes two-way communi-
cation using the same frequency and time resources [2]. However, full-duplex
communication cannot be realized without resolving the self-interference problem,
i.e. the strong transmitting signal is captured by its receiving antennas which
interferes with the desired receiving signals. Ideally, self-interference can be
eliminated by digital subtraction since the self-interference is known signal [3].
However, the self-interference is significantly stronger than the desired signal, and
causes RF (Radio Frequency) front-end saturation, which produces nonlinear signal
distortion. In this case, digital subtraction is unable to adequately suppress the
self-interference [4]. Therefore, the self-interference needs to be suppressed before
the RF front-end at the receiver. To combat this, three methods have been studied
[5, 6, 7]. Antenna cancellation uses an additional transmitting antenna to form a null
point at the receiving antenna [5]. Balun cancellation places a balun circuit between
the transmitting and receiving antennas to subtract the self-interference signals from
the received signals [6]. Note that these methods cannot be directly applied to
MIMO systems because the interference among all combinations of transmitting and
receiving antennas must be considered and implementation is difficult. To resolve
this problem, eigen-beamforming using linear array antennas in the end-fire arrange-
ment was proposed for self-interference reduction in the MIMO full-duplex system
[7]. This method offers very high interference reduction with the consumption of
only one degree-of-freedom of the antenna array; this antenna arrangement degen-
erates the rank of the interference channel to 1. Only the S-parameter of the antennas
has been used to verify the performance of this method, meaning that the total
cancellation performance, including signal subtraction, has yet to be evaluated.
This letter experimentally evaluates the interference cancellation performance
of the method proposed in [7] by using real MIMO-OFDM signals. A signal frame-
© IEICE 2017DOI: 10.1587/comex.2016XBL0175Received September 29, 2016Accepted October 25, 2016Publicized November 22, 2016Copyedited February 1, 2017
72
IEICE Communications Express, Vol.6, No.2, 71–76

format is newly developed for this experiment, and the total performance of the
self-interference reduction method including digital subtraction technique is inves-
tigated, where the remaining interference caused by the saturation of the RF front-
end and imperfection of the antenna arrangement is evaluated.
2 Self-interference reduction method using eigen-beamforming and
digital subtraction
Fig. 1(a) shows a system model of the in-house-developed full-duplex testbed with
linear array antennas in the end-fire arrangement. M and N are the number of
transmitters (Tx) and receivers (Rx), respectively, H is the interference channel,
and s is the transmission signal. Let us describe the eigen-beamforming scheme in
this experiment. The singular value decomposition of the interference channel H is
given by
H ¼ U�VH; ð1Þwhere f�gH represents Hermitian transpose. V and U are eigen-vector matrices of
Tx and Rx, respectively. The number of eigen-values is given by
Fig. 1. System model and MIMO-OFDM frame format
© IEICE 2017DOI: 10.1587/comex.2016XBL0175Received September 29, 2016Accepted October 25, 2016Publicized November 22, 2016Copyedited February 1, 2017
73
IEICE Communications Express, Vol.6, No.2, 71–76

Ni ¼ minðM;NÞ; ð2Þand V and � are defined by
V ¼ ½v1; v2; � � � ; vM� ð3Þ� ¼ diagð ffiffiffiffiffi
�1p
;ffiffiffiffiffi�2
p; � � � ; ffiffiffiffiffiffi
�Ni
p Þ; ð4Þwhere vi is the i-th transmission weight vector, and �i is the i-th eigen-value. The
eigen-values correspond to the received signal strength of the eigen-modes. Eigen-
beamforming is the interference reduction technique that uses the eigen-mode
weight vector described in (3). The i-th transmission mode is formed by the i-th
transmission weight vector. In the eigen-beamforming scheme, the eigen-vectors
excluding those corresponding to several of the largest eigen-values are used. This
lowers the degree-of-freedoms of the antennas, where the number is determined
by the number of suppressed modes. When transmitting and receiving linear array
antennas are placed in an end-fire arrangement, the rank of the transmission modes
is expected to degenerate to 1. This means, the required number of the antenna-
degrees-of-freedom is minimized to 1, ideally. However, the rank of the interfer-
ence channel in the actual antenna array cannot made 1 because of the channel
imperfections created by the mutual coupling among the antennas and the finite
distance between the transmitting and receiving arrays. The self-interference
remains as the interference channel is imperfect. The remaining interference can
be digitally subtracted because the transmitted signals are known. If transmit-
beamforming is not used, the interference signals significantly impact the RF front-
end at its receiver, and subtraction become ineffective as the interfering signals are
nonlinearly distorted.
Fig. 1(b) shows the frame format of the MIMO-OFDM signals. SP (Short
Pramble) synchronizes Tx and Rx, and LP (Long Preamble) is used to estimate the
interference channel. LPi;j and DATAi;j are the signals for j-th eigen-modes
transmitted from the i-th antenna. The interference power is defined by the DATA
signals observed at the receiver. In this scheme, the first channel estimation
(w/oBF LP) is performed to get the interference channel H. Eigen-beamforming
is realized by using the transmission weight matrix consisting of eigen-vectors,
½v2; � � � ; vM�. The second channel estimation (w/BF LP) is also performed to
estimate the interference channel, where the transmission weight without the major
interference mode is used at Tx side. The received signal after digital subtraction is
given by
ySUB ¼ y �Hi~V1s; ð5Þ
where ySUB is the received signal after digital subtraction, y is the received signal,
and s is the transmitted signal.
3 Experiments using MIMO-OFDM signals
3.1 Experimental setup
Fig. 2 shows the measurement environment. The transmitting and receiving anten-
nas are linear array antennas consisting of four element half-wavelength sleeve
antennas. The center frequency is 2.47GHz. For the linear array antennas, the
© IEICE 2017DOI: 10.1587/comex.2016XBL0175Received September 29, 2016Accepted October 25, 2016Publicized November 22, 2016Copyedited February 1, 2017
74
IEICE Communications Express, Vol.6, No.2, 71–76

center-to-center distance between Tx and Rx is dTx-Rx ¼ 10�0 (�0: wavelength in a
vacuum), and the element spacing delement is changed from 0:25�0 to 1:5�0. Sheet-
like microwave absorbers are placed below the antennas in order to prevent
reflection from the fixtures.
3.2 Simulation results
Fig. 3(a) shows the eigen-value distribution versus element spacing. The maximum
difference between the first and second eigen-values is 32 dB at delement ¼ 0:25�0,
and the minimum difference is 23 dB at delement ¼ 1:5�0. From this result, the eigen-
Tx Rx
dTx-Rx
dElementSleeve antennas
Microwave absorbers
Fig. 2. Measurement environment
Fig. 3. Measured results
© IEICE 2017DOI: 10.1587/comex.2016XBL0175Received September 29, 2016Accepted October 25, 2016Publicized November 22, 2016Copyedited February 1, 2017
75
IEICE Communications Express, Vol.6, No.2, 71–76

weight without first eigen-mode can suppress the interference by more than 23 dB.
Further, the narrower the element spacing becomes, the more eigen-beamforming
suppresses the interference.
Fig. 3(b) shows the interference level versus element spacing. The interference
level is defined as the level of the total received power at Rx side relative to the
total input power at Tx side. Comparing the interference levels without eigen-
beamforming (w/o BF) and with eigen-beamforming (w/ BF) shows that eigen-
beamforming suppresses the interference by at least 20 dB for all element spacing’s
examined. We also found the minimum interference level, −64 dB, is achieved witheigen-beamforming at delement ¼ 0:5�0. The combination of an eigen-beamforming
and digital subtraction (w/ BF + Sub) can suppress the interference to −76 dB at
delement ¼ 0:5�0, which is 12 dB lower than that without subtraction. This result
shows that digital subtraction further suppresses the self-interference power.
4 Conclusion
Experiments confirmed that our combination of eigen-beamforming and digital
subtraction, where linear array antennas in end-fire arrangement are used, can
significantly reduce the self-interference reduction. When the element spacing is
delement ¼ 0:5�0, the interference level reduction achieved by eigen-beamforming
is −64 dB, while with eigen-beamforming and digital subtraction the reduction is
−76 dB. Further interference reduction is needed to implement this technique in
actual full-duplex systems and will be the target of future work.
Acknowledgments
This research and development work was supported by the MIC/SCOPE
#155002002.
© IEICE 2017DOI: 10.1587/comex.2016XBL0175Received September 29, 2016Accepted October 25, 2016Publicized November 22, 2016Copyedited February 1, 2017
76
IEICE Communications Express, Vol.6, No.2, 71–76

Demonstration of wirelesstwo-way interferometry(Wi-Wi)
Nobuyasu Shiga1,2a), Kohta Kido1, Satoshi Yasuda1, Bhola Panta1,Yuko Hanado1, Seiji Kawamura1, Hiroshi Hanado1,Kenichi Takizawa1, and Masugi Inoue11 National Institute of Information and Communications Technology (NICT),
4–2–1 Nukui-Kitamachi, Koganei, Tokyo 184–8795, Japan2 PRESTO, Japan Science and Technology (JST),
4–1–8 Honcho Kawaguchi, Saitama 332–0012, Japan
Abstract: Wireless two-way interferometry (Wi-Wi) is the simplified ver-
sion of “carrier phase based two-way satellite time and frequency transfer,”
wherein a wireless communication technology is used instead of a satellite
communication technology. We used the carrier phase of a 2.4GHz ZigBee
module to measure the variation of two rubidium clocks at remote sites.
Since clocks in the ZigBee module are much less precise than rubidium
clocks, the carrier phase of the ZigBee signal cannot be used to compare
two rubidium clocks in a simple manner. Using a technique to cancel the
clock error of transmitters, we demonstrated picosecond-level precision
measurement of the time variation of clocks between two remote systems.
This synchronization technique at picosecond-level precision opens the door
to low-cost wireless positioning at millimeter accuracy.
Keywords: time synchronization, precision motion sensing, ranging
Classification: Wireless Communication Technologies
References
[1] D. W. Hanson, “Fundamentals of two-way time transfers by satellite,” Proc. ofthe 43rd Annual Symposium on Frequency Control, 1989.
[2] M. Fujieda, T. Gotoh, F. Nakagawa, R. Tabuchi, M. Aida, and J. Amagai,“Carrier-phase-based two-way satellite time and frequency transfer,” IEEETrans. Ultrason. Ferroelectr. Freq. Control, vol. 59, pp. 2625–2630, 2012.DOI:10.1109/TUFFC.2012.2503
1 Introduction
Time synchronization plays an important role in our lives. Many areas of informa-
tion and communication technologies, for example, modern computer networks and
wired and wireless communication networks require precise time synchronization.
Similarly, infrastructures such as smart grids and positioning systems require time
© IEICE 2017DOI: 10.1587/comex.2016XBL0181Received October 12, 2016Accepted November 1, 2016Publicized November 25, 2016Copyedited February 1, 2017
77
IEICE Communications Express, Vol.6, No.2, 77–82
synchronization, which shows how critical it is to have a properly synchronized
system.
Today, increasingly more devices are being equipped with wireless communi-
cation capabilities, and our goal is to demonstrate that commercial communication
modules are already capable of synchronization at picosecond (ps)-level precision
after making minor changes to their digital circuits. That is, devices can also be
“synchronized” rather than just “connected”. Time synchronization using wireless
communication modules has been overlooked because recent communication
technology is based on desynchronized methods such as serial communication.
In this paper, we demonstrate how to monitor the clock difference at ps-level
precision by measuring the carrier phase of transmitted signals. We show how to
embed time synchronization in the protocol of wireless communication networks.
The principle of Wi-Wi is the comparison of the clock time between two remote
sites using the transmitted wireless signals. To cancel the propagation delay, we
employ the two-way time transfer (TWTT) technique [1] that was originally used
in satellite time and frequency transfer (TWSTFT). Later, carrier-phase TWSTFT
(TWCP) [2] was developed to measure the variation of time at a much higher
precision. TWCP gives higher precision in tracking the variation of the time
reference but it only tells us the variation from the initial measurement since the
carrier phase itself does not contain precise time information. Wi-Wi is a combi-
nation of TWTT and TWCP. It can be used for precise node localization as well as
time synchronization. In this paper, we only focus on the synchronization aspect,
using the principles of TWCP.
2 Experiment
In this section, we introduce the concepts of TWTT and TWCP using our
experimental setup.
2.1 Two-way time transfer (TWTT) technique
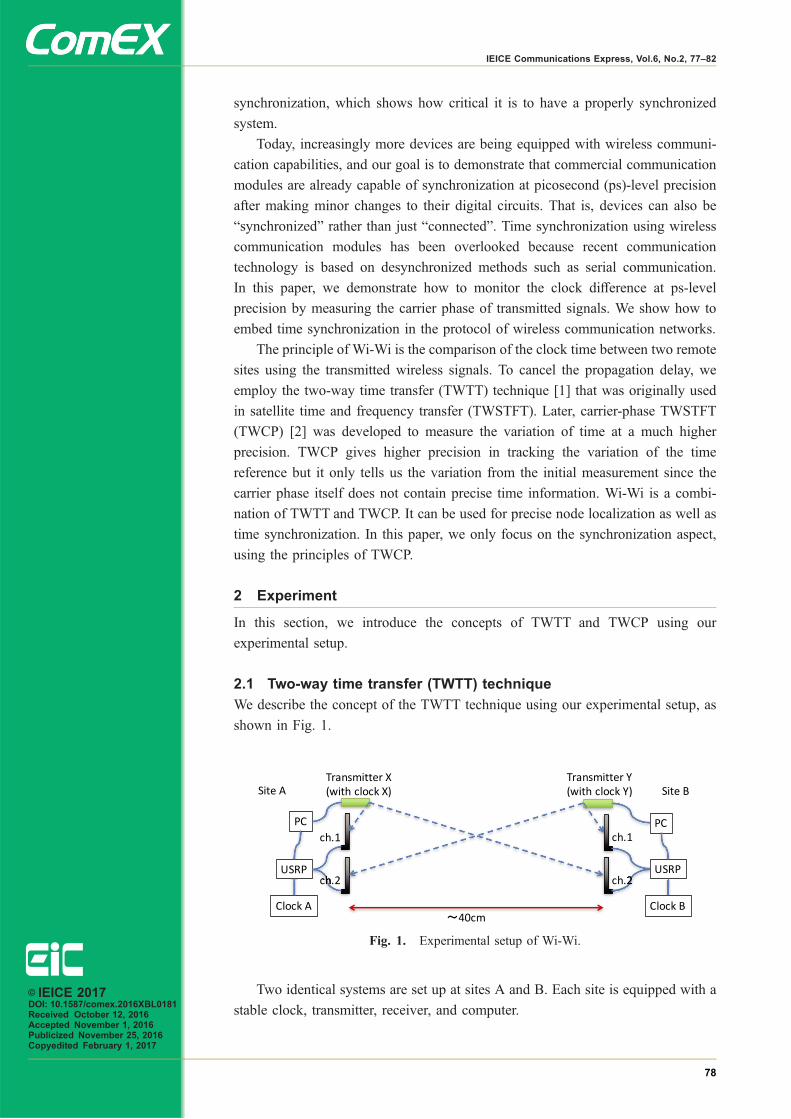
We describe the concept of the TWTT technique using our experimental setup, as
shown in Fig. 1.
Two identical systems are set up at sites A and B. Each site is equipped with a
stable clock, transmitter, receiver, and computer.
Fig. 1. Experimental setup of Wi-Wi.
© IEICE 2017DOI: 10.1587/comex.2016XBL0181Received October 12, 2016Accepted November 1, 2016Publicized November 25, 2016Copyedited February 1, 2017
78
IEICE Communications Express, Vol.6, No.2, 77–82

In this paper, we denote time as T and the time interval as t. We denote the time
of clock A as TA and the time of clock B as TB. The difference between TA and TB,
tc � TB � TA, is calculated as follows.
Transmitter X at site A sends TTxA to site B. The receiver at site B receives the
signal at TRxB after a propagation delay, td. The time difference tB, between
reception at site B (TRxB) and transmission at site A (TTxA) is expressed as
tB � TRxB � TTxA ¼ tc þ td: ð1ÞTo cancel the propagation delay td, we also transmit TTxB to site A and record the
time difference from TRxA as tA:
tA � TRxA � TTxB ¼ �tc þ td: ð2ÞAssuming that variations in tc and td during the round trip of wireless communi-
cation are negligible, we subtract eq. (2) from eq. (1) and calculate tc as
tc ¼ tB � tA2
: ð3ÞThis is the basic concept of TWTT and has already been demonstrated in [1].
2.2 Carrier phase two-way time transfer (TWCP)
TWCP uses the carrier phase of the transmitted signal instead of the time signal.
Equation (3) can be rewritten using a measured phase,
tc � �c=ð4�f0Þ ¼ ð�B � �A þ 2�McÞ=ð4�f0Þ; ð4Þwhere f0 is the carrier frequency, �c is the phase difference between clocks A and
B, and �A is the phase advance of the transmitted signal after the propagation from
B to A. Likewise, �B is the phase advance of the transmitted signal after the
propagation from A to B. Since the measured phase can only be obtained as
modulo 2�, natural numberMc should be separately determined in order to measure
tc. One can, however, still measure tc repetitively, and the variation from the initial
measurement can be tracked when the variation of �c between adjacent measure-
ments is guaranteed to be smaller than π. This has already been demonstrated in [2].
2.3 TWCP using commercial transmitter
In this experiment, we used commercial, off-the-shelf transmitters for TWCP. These
transmitters are cheaper and users need not go through a cumbersome authorization
process to use them. However, since their internal clock is less stable than a
rubidium clock, they cannot be used to compare two rubidium clocks from two
remote sites in a simple manner. By measuring the phase of the same signal at
the transmitter as well as the receiver side and subtracting the phases, the trans-
mitter clock error can be cancelled. Using this technique, we were able to compare
the two rubidium clocks belonging to the two remote sites. The calculation method
is described in detail in the following sections.
2.4 Experimental setup
As shown in Fig. 1, each site consists of a personal computer (PC), a wireless
communication module, a software-defined radio with two receivers, and a rubi-
dium clock. We used a 2.4GHz ZigBee module (MoNoStick: Mono Wireless Inc.)
© IEICE 2017DOI: 10.1587/comex.2016XBL0181Received October 12, 2016Accepted November 1, 2016Publicized November 25, 2016Copyedited February 1, 2017
79
IEICE Communications Express, Vol.6, No.2, 77–82
that was connected to the PC through a USB cable. The software-defined radios
(USRP-2942: National Instruments) were referenced to the 10MHz generated by
the rubidium clock (SIM940: Stanford Research Systems) through a coax cable.
The PC and USRP were connected by a PCI Express (PCIe) cable. We assigned
separate channels to each ZigBee module in the two locations for the sake of
simplicity. The USRP has two Rx channels: channel 1 received the signal from the
transmitter at the same site and channel 2 received the signal from the other site.
ZigBee communication is based on IEEE 802.15.4 (2450MHz) PHY, which
employs offset quadrature phase-shift keying (O-QPSK). The USRP digitizes the
baseband in-phase (I) and quadrature (Q) 16-bit signals at a rate of 4MSample/s
and sends them to the PC via the PCIe cable. The PC was used to decode the
signals, symbol by symbol, by taking the correlation of 16-chip sequences. The
phase was measured for each symbol and the average of all the unwrapped symbol
phases, representing the phase of each packet, was recorded.
2.5 Calculation procedure
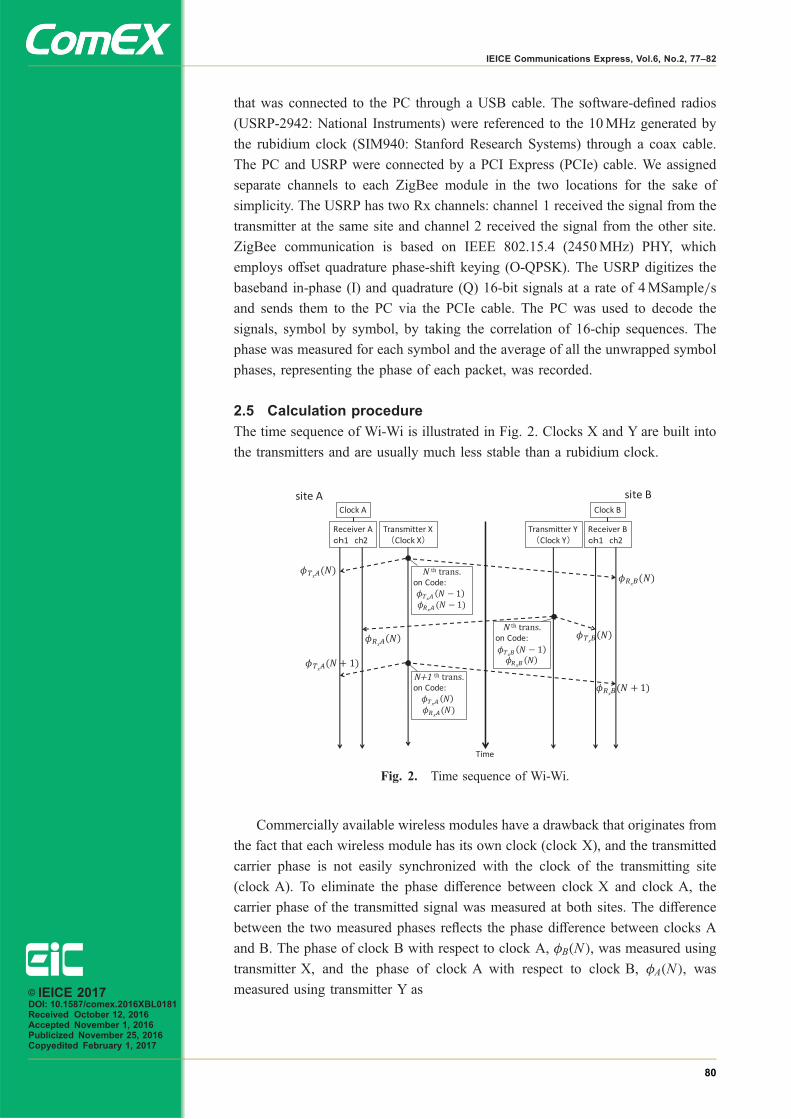
The time sequence of Wi-Wi is illustrated in Fig. 2. Clocks X and Y are built into
the transmitters and are usually much less stable than a rubidium clock.
Commercially available wireless modules have a drawback that originates from
the fact that each wireless module has its own clock (clock X), and the transmitted
carrier phase is not easily synchronized with the clock of the transmitting site
(clock A). To eliminate the phase difference between clock X and clock A, the
carrier phase of the transmitted signal was measured at both sites. The difference
between the two measured phases reflects the phase difference between clocks A
and B. The phase of clock B with respect to clock A, �BðN Þ, was measured using
transmitter X, and the phase of clock A with respect to clock B, �AðN Þ, was
measured using transmitter Y as
Fig. 2. Time sequence of Wi-Wi.
© IEICE 2017DOI: 10.1587/comex.2016XBL0181Received October 12, 2016Accepted November 1, 2016Publicized November 25, 2016Copyedited February 1, 2017
80
IEICE Communications Express, Vol.6, No.2, 77–82

�BðN Þ � �RxBðN Þ � �TxAðN Þ; ð5Þ�AðN Þ � �RxAðN Þ � �TxBðN Þ: ð6Þ
Here, �RxB denotes the phase of the clock X as received at site B and �TxA denotes
the phase of the clock X as received at site A. Similarly, �RxA denotes the phase
of the clock Y as received at site A and �TxB denotes the phase of clock Y
as received at site B. A and B denote the location of transmission or reception.
Although the phase of clock X and clock Y has no correlation with the rubidium
clocks due to its inaccuracy, �BðN Þ and �AðN Þ reflect the phase difference betweenclock A and B with the initial offset.
Finally, the time difference tc is calculated from eq. (4).
tcðN Þ � �cðN Þð4�f0Þ ¼
�BðN Þ � �AðN Þ þ 2�Mc
4�f0
; ð7Þ
This tc has ambiguity of Mc. By determining Mc by a separate technique, one can
calculate tc. Even if Mc is unknown, one can still unwrap the repetitive measure-
ment of phase to determine the variation of time from the beginning of the
measurement by keeping track of the change in Mc from the initial measurement.
2.6 Results
Fig. 3 shows the experimental results. We measured the clock variation over a
5min interval. Sites A and B are separated by about 40 cm. Transmitters X and Y
transmit the signals alternately at a rate of approximately 10 times per second.
Fig. 3 shows the case in which the antennae were stationary. The clock difference,
plotted in red, varied by about 2 ns over the 5min interval, which is reasonable for
rubidium clocks. The propagation delay, plotted in blue, varied by less than 10 ps
with a standard deviation of 2.2 ps. This 2.2 ps deviation indicates the measurement
limit of our 2.4GHz ZigBee Wi-Wi system. By connecting the same clock at the
two sites (clock A = clock B), we can directly determine the measurement noise of
tc, and we verified that the noise had the same deviation of 2 ps.
We used unwrapped º to calculate tc and td, as already mentioned in the
previous section. The unwrapping worked well because the variation between
adjacent measurements was much smaller than 0.4 ns which corresponds to 2� in
phase. The important point here is that since we use very stable clock for com-
parison, the measurement need not to be frequent. One measurement per second is
good enough with the rubidium clocks.
Fig. 3. Measurement of variation in clock difference and propagationdelay over a 5min interval using Wi-Wi.
© IEICE 2017DOI: 10.1587/comex.2016XBL0181Received October 12, 2016Accepted November 1, 2016Publicized November 25, 2016Copyedited February 1, 2017
81
IEICE Communications Express, Vol.6, No.2, 77–82

3 Conclusion
We demonstrated that we can monitor the variation of the clocks and the prop-
agation delay of two remote communication devices by repeatedly measuring the
carrier phase of the transmitted signal. When the signal propagation environment is
favorable and the clocks are stable, Wi-Wi can achieve ps-level precision. Because
we used off-the-shelf transmitting devices, the licensing procedure is unnecessary.
Therefore, this setup is suitable for the research and development phase of
applications.
4 Outlook
Our technique should be immediately useful for the synchronization of two remote
clocks at ps level precision. Some of the applications of this technique include the
synchronization of wireless networks and smart grids, time-and position-tagged
data logging of sensors, and monitoring of the shape and tilt of buildings. In this
study, we used 2.4GHz ZigBee modules, but the concept of Wi-Wi can be easily
adapted to any wireless system which may employ various band and modulation
schemes.
Acknowledgments
This work was supported by the JST PRESTO program and NICT.
© IEICE 2017DOI: 10.1587/comex.2016XBL0181Received October 12, 2016Accepted November 1, 2016Publicized November 25, 2016Copyedited February 1, 2017
82
IEICE Communications Express, Vol.6, No.2, 77–82
Underdetermined blindseparation of adjacentsatellite interference inmodern satellitecommunication systems
Chengjie Li1a), Lidong Zhu1b), and Zhen Zhang2c)1 National Key Laboratory of Science and Technology on Communication,
University of Electronic Science and Technology of China,
No. 2006, Xiyuan Ave, West Hi-Tech Zone, Chengdu, China2 NCS Pte. Ltd. of Singapore Telecommunications Limited,
Ang Mo Kio Street 62, NCS Hub, Singapore
Abstract: In this paper, a novel underdetermined blind source separation
algorithm guided by particle swarm optimizer (PSO) is proposed for adjacent
satellite interference in modern satellite communication systems. Different
from traditional methods, we formulate the separation problem as clustering
problem. Due to our algorithm is affected by the sparsity of source signals
and the density of mixed vectors, our algorithm is motivated by the
assumption is held that the distance between two arbitrary mixed signal
vectors is less than the doubled sum of variances of distribution of the
corresponding mixtures. In our method, we accomplish the underdetermined
blind source separation by computing the Short Time Fourier Transform
(STFT) to segment received mixtures and we use some estimates to separate
the mixed source signals by PSO where the number of the mixed signals is
unknown. In PSO, we define new parameters gather in formula (8) and cj in
formula (11). We verify the proposed method on several simulations. The
experimental results demonstrate the effectiveness of the proposed method.
Keywords: adjacent satellite interference, blind source separation, particle
swarm optimizer, Short Time Fourier Transform, sampling point
Classification: Fundamental Theories for Communications
References
[1] S. N. Livieratos, G. Ginis, and P. G. Cottis, “Availability and performance ofsatellite links suffering from interference by an adjacent satellite and rain fades,”IEE Proc., Commun., vol. 146, no. 1, pp. 61–67, 1999. DOI:10.1049/ip-com:19990285
[2] O. Tichý and V. Šmídl, “Bayesian blind separation and deconvolution of
© IEICE 2017DOI: 10.1587/comex.2016XBL0166Received September 13, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
83
IEICE Communications Express, Vol.6, No.2, 83–90

dynamic image sequences using sparsity priors,” IEEE Trans. Med. Imaging,vol. 34, no. 1, pp. 258–266, Jan. 2015. DOI:10.1109/TMI.2014.2352791
[3] M. Atcheson, I. Jafari, R. Togneri, and S. Nordholm, “On the use of contextualtime-frequency information for full-band clustering-based convolutive blindsource separation,” IEEE International Conference on Acoustic, Speech andSignal Processing (ICASSP), pp. 2114–2118, 2014. DOI:10.1109/ICASSP.2014.6853972
[4] L. T. Duarte, J. M. T. Romano, C. Jutten, K. Y. Chumbimuni-Torres, and L. T.Kubota, “Application of blind source separation methods to ion-selectiveelectrode arrays in flow-injection analysis,” IEEE Sensors J., vol. 14, no. 7,pp. 2228–2229, 2014. DOI:10.1109/JSEN.2014.2318174
[5] M. A. Loghmari, M. S. Naceur, and M. R. Boussema, “A new sparse sourceseparation-based classification approach,” IEEE Trans. Geosci. Remote Sens.,vol. 52, no. 11, pp. 6924–6936, Nov. 2014. DOI:10.1109/TGRS.2014.2305724
[6] F. van den Bergh and A. P. Engelbrecht, “A cooperative approach to particleswarm optimization,” IEEE Trans. Evol. Comput., vol. 8, No. 3, pp. 225–239,June 2004. DOI:10.1109/TEVC.2004.826069
[7] T.-Y. Sun, C.-C. Liu, S.-J. Tsai, S.-T. Hsieh, and K.-Y. Li, “Cluster GuideParticle Swarm Optimization (CGPSO) for underdetermined blind sourceseparation with advanced conditions,” IEEE Trans. Evol. Comput., vol. 15,no. 6, pp. 798–811, Dec. 2011. DOI:10.1109/TEVC.2010.2049361
[8] C. C. Liu, T. Y. Sun, K. Y. Li, and S. T. Hsieh, and S. J. Tsai, “Blind sparsesource separation using cluster particle swarm optimization technique,” Proc.Int. Conf. Artif. Intell. Applicat., 549-217, 2007.
[9] Y. Ning, X. Zhu, S. Zhu, and Y. Zhang, “Surface EMG decomposition based onK-means clustering and convolution kernel compensation,” IEEE J. Biomed.Health Inform., vol. 19, no. 2, pp. 471–477, Mar. 2015. DOI:10.1109/JBHI.2014.2328497
1 Introduction
Adjacent satellite interference is same frequency interference caused by satellites in
nearby orbital location. Though people can reduce the influence by isolating wave
beam coverage area/frequency or reducing the antenna sidelobe etc., such cases of
interference happen more and more frequently due to synchronous orbit traffic get
heavier, especially for Ultra Small Apeture Terminal (USAT). Adjacent satellite
interference framework is shown in Fig. 1, the solid line is useful signal and
the dotted line is the adjacent satellite interference signal. For many years,
researches on adjacent satellite interference has been an important subject. In
1999, SLivieratos etc. adopted Crane model for adjacent interference of satellite
communication links [1].
Blind source separation (BSS) is a major research area in signal processing and
machine learning, and that has a large scope of applications in many fields, such as
image recognition, speech enhancement, biomedical signal processing, wireless
communications etc. [2, 3, 4] BSS aims to extract individual components from their
mixture samples where there is very limited, or no, prior information on mixture
samples nature or the mixing process. Recently, many BSS methods are based on
Independent Component Analysis with the assumption that the sources are inde-
pendent signals. However, if initial parameters are not given, those methods will
© IEICE 2017DOI: 10.1587/comex.2016XBL0166Received September 13, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
84
IEICE Communications Express, Vol.6, No.2, 83–90

produce a poor solution. And a suitable initial parameters is unlikely to be open
information because of the blind hypothesis. Consequently, some accurate, efficient
and robust BSS algorithms are desired.
We focus on BSS problem for adjacent satellite interference. To overcome the
above difficulties, this article proposes a novel particle swarm optimizer (PSO)
mechanism for identifying the exact mixing vector. In this article, we formulate
the separation problem as clustering problem. Due to our algorithm is affected by
the sparsity of source signals and the density of mixed vectors, our algorithm is
motivated by the fact that the assumption that the distance between two arbitrary
mixed signal vectors is less than the doubled sum of variances of distribution for
the corresponding mixtures is held.
The rest of this paper is organized as follows. In Section II, we introduce the
preparatory work of this article. In Section III, we introduce the novel BSS
algorithm with PSO. In Section IV, we introduce and discuss the experimental
results. Finally, the conclusion is drawn in Section V.
2 Preparatory work
In this section, we introduce the related preparatory work of Density Clustering
algorithm (DC-algorithm).
2.1 BSS model
BSS aims at separating a set of N unknown sources from a set of M observations.
Usually, the observations are obtained from M sensors, each sensor receives a
mixture of those sources. In this article, we only consider linear instantaneous
mixtures model, each observation is described as below [5]:
yjðtÞ ¼XNi¼1
aijsjðtÞ þ niðtÞ; j ¼ 1; 2; � � � ; M ð1Þ
Here, aij is the ði; jÞth element of the mixed matrix, niðtÞ is the ith component of the
noise. Equation (2) can also be written in matrix form,
YðtÞ ¼ ASðtÞ þ NðtÞ ð2Þ
Fig. 1. Framework of adjacent satellite interference
© IEICE 2017DOI: 10.1587/comex.2016XBL0166Received September 13, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
85
IEICE Communications Express, Vol.6, No.2, 83–90

2.2 Particle swarm optimizer (PSO) model
In PSO, a goal is to minimize a objective function f, and there are three attributes,
the particles’ current position pi, current velocity vi, and local best position Pbi.
Each particle in the swarm is iteratively updated according to the aforementioned
attributes. In [6], a compact and workable PSO version is proposed, the new
velocity of every particle is updated by the following formula,
vijðg þ 1Þ ¼ �0 � vijðgÞ þ �1 � r1½PbijðgÞ � pijðgÞ�þ �2 � r2½GbjðgÞ � pijðgÞ�
ð3Þ
here, j ¼ 1; 2; . . . ; k denotes the index of dimension, i ¼ 1; 2; . . . ; sz denotes the
individual of particles, PbijðgÞ denotes the local best position of the jth dimension
of the ith particle, and GbjðgÞ denotes the global best position at the gth generation.
vijðgÞ is the velocity of the jth dimension of the ith particle. There are three
parameters that should be predefined suitably for the better performance of PSO.
�0 is the inertia weight of velocity, �1 and �2 denote the acceleration coefficients,
r1 and r2 are elements from two uniform random sequences in the range ð0; 1Þ, andg is the number of generations. The new position of a particle is calculated by the
following formula,
piðg þ 1Þ ¼ piðgÞ þ viðg þ 1Þ ð4ÞThe local best position of each particle is updated by
Pbiðg þ 1Þ ¼ PbiðgÞ; if fðpiðg þ 1ÞÞ � fðPbiðgÞÞpiðg þ 1Þ; otherwise
�ð5Þ
and the global best position (Gb) found from all particles during the previous three
steps is defined as
Gbðg þ 1Þ ¼ argminPbi
fðPbiðg þ 1ÞÞ; 1 � i � sz ð6Þ
The evolutionary process will continuously repeat (3)–(6) until some terminative
condition is reached.
3 Improved BSS algorithm with PSO
Because of only two sensors are available, the received mixtures are represented
as ½Y1ðt; fÞ; Y2ðt; fÞ�T . Since source signals are sparse, the mixtures center around
the mixing vectors on the Y1 � Y2 coordinate plane. And Yiðt; fÞ is described as
follows:
Yiðt; fÞ ¼Z 1
0
yðtÞhð� � tÞe�j2�f�d�; i ¼ 1; 2 ð7Þ
Here, yðtÞ is the received mixing signal, hð� � tÞ is the Hamming window function.
Thus, unobservable mixing vectors could emerge from these clusters of mixtures.
In fact, since local optima would reduce the performance of conventional methods
or the source signals may not be sparse enough, the mixing vectors not scattered
enough to be able to easily distinguished. In order to enhance BSS performance
and handle more advanced conditions, the improved BSS algorithm with PSO is
developed to search mixed vectors [7].© IEICE 2017DOI: 10.1587/comex.2016XBL0166Received September 13, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
86
IEICE Communications Express, Vol.6, No.2, 83–90

3.1 Definition of parameter
In the development of BSS algorithm with PSO, p ¼ ½�1; �2; . . . ; �k� is a set of
estimated vectors and regarded as a particle of PSO, where 8� 2 ð� �2; �2Þ and k
denotes the dimension of each particle, that is, k is the maximal number of
estimated vectors. The elements of a particle represent the gathering angles of
mixtures. Since n mixing vectors have to be found and n is unknown, a value k
will be given, k � n. Compared with the [8], a normal angle with one dimension
replaced the original plane coordinate with two dimensions for some estimated
mixing vectors. Hence, the learning complexity can be reduced and the searching
range becomes definite.
Because the gathering directions of mixtures imply the location of the mixing
vectors, an objective function that evaluates how close the estimated mixing vectors
are to the gatherings is defined as
gather ¼XNi¼1
�2i � ��i ð8Þ
where �i ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiy21ðiÞ þ y22ðiÞ
pdenotes the energy of the signal of the ith mixture, which
is regarded as the weight of each mixture. So, a sample with a large ξ indicates a
main signal that is regarded as important. ��i denotes the differential angle between
the ith mixture vector and the nearest estimated vector and is calculated by
��i ¼ minj�i � �jj; i ¼ 1:2; . . . ; N and j ¼ 1; 2; . . . ; k ð9Þwhere �i is the angle of the ith mixture vector. When all δ approach the center of
the mixture gathering, �� will reduce integrally. So, a particle responding with the
minimum of the objective function denotes its elements place exactly in the
direction of a gathering of mixtures. gather values of particles are evaluated by
(8). According to gather values we can update the Pb and Gb by (5) and (6).
3.2 Global best position Gb is replaced with cluster centers set CSince mixtures gather toward the mixing vectors, cluster centers are more likely to
produce a better solution than global best position (Gb). Moreover, it not only
substantially improves Gb during initial generations, but also fine tunes Gb during
final generations. Consequently, cluster information is the more preferable guide for
particles compared to Gb. The factor Gb is replaced with cluster centers set C in (7),
which could be rewritten as
vijðg þ 1Þ ¼ �0 � vijðgÞ þ �1 � r1½PbijðgÞ � pijðgÞ�þ �2 � r2½cjðgÞ � pijðgÞ�
ð10Þ
where fcjjj ¼ 1; 2; . . . ; kg 2 C is a set of cluster centers according to Gb, and each
component is evaluated by
cj ¼
Xcnji¼1
ð�2i � �iÞ
Xcnji¼1
�2i
ð11Þ
© IEICE 2017DOI: 10.1587/comex.2016XBL0166Received September 13, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
87
IEICE Communications Express, Vol.6, No.2, 83–90
where j denotes the index of the cluster, cnj denotes the number of mixtures that
belong to the jth estimated vector, and i is the index of mixtures. Since the involved
signals are sparse, �i could be regarded as a weight to the angle of the ith mixture.
In other words, mixtures with a larger ξ have a greater effect upon the cluster center
that it belongs to, whereas others are noisy or even voiceless.
After the above process, the cluster centers can be found. Then, every remain-
ing sampling point is assigned to the same cluster as its nearest cluster center.
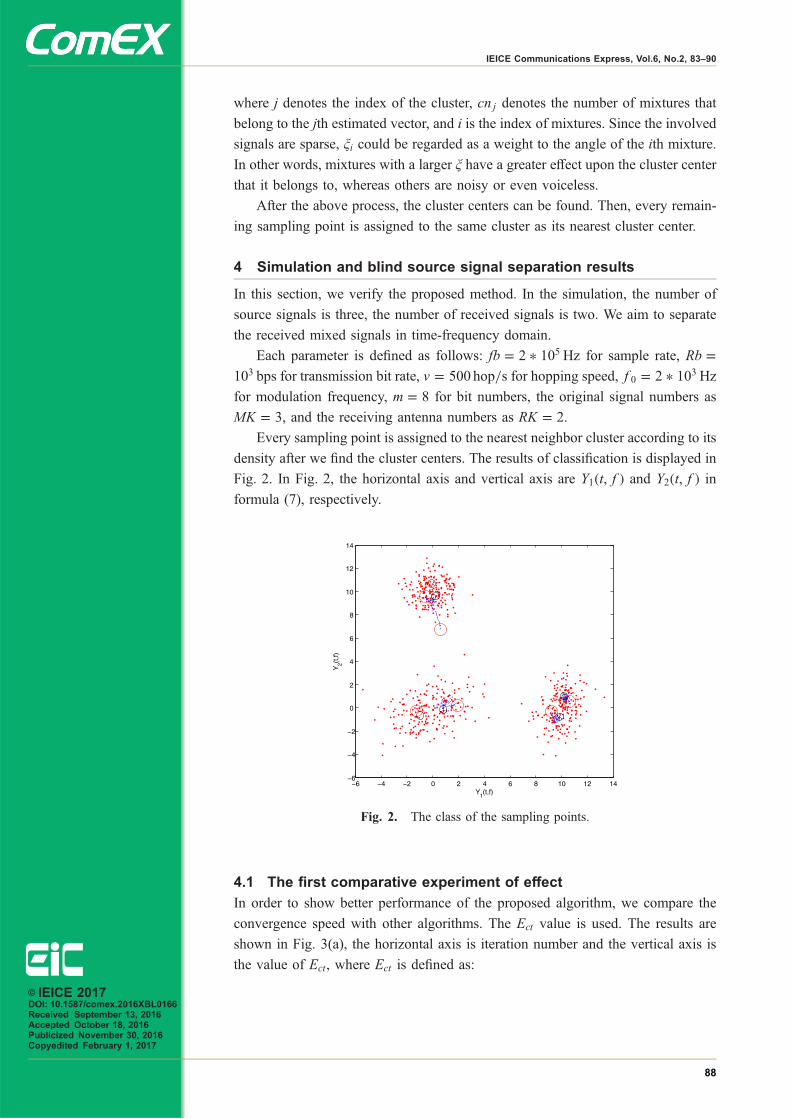
4 Simulation and blind source signal separation results
In this section, we verify the proposed method. In the simulation, the number of
source signals is three, the number of received signals is two. We aim to separate
the received mixed signals in time-frequency domain.
Each parameter is defined as follows: fb ¼ 2 � 105Hz for sample rate, Rb ¼103 bps for transmission bit rate, v ¼ 500 hop/s for hopping speed, f0 ¼ 2 � 103Hz
for modulation frequency, m ¼ 8 for bit numbers, the original signal numbers as
MK ¼ 3, and the receiving antenna numbers as RK ¼ 2.
Every sampling point is assigned to the nearest neighbor cluster according to its
density after we find the cluster centers. The results of classification is displayed in
Fig. 2. In Fig. 2, the horizontal axis and vertical axis are Y1ðt; fÞ and Y2ðt; fÞ informula (7), respectively.
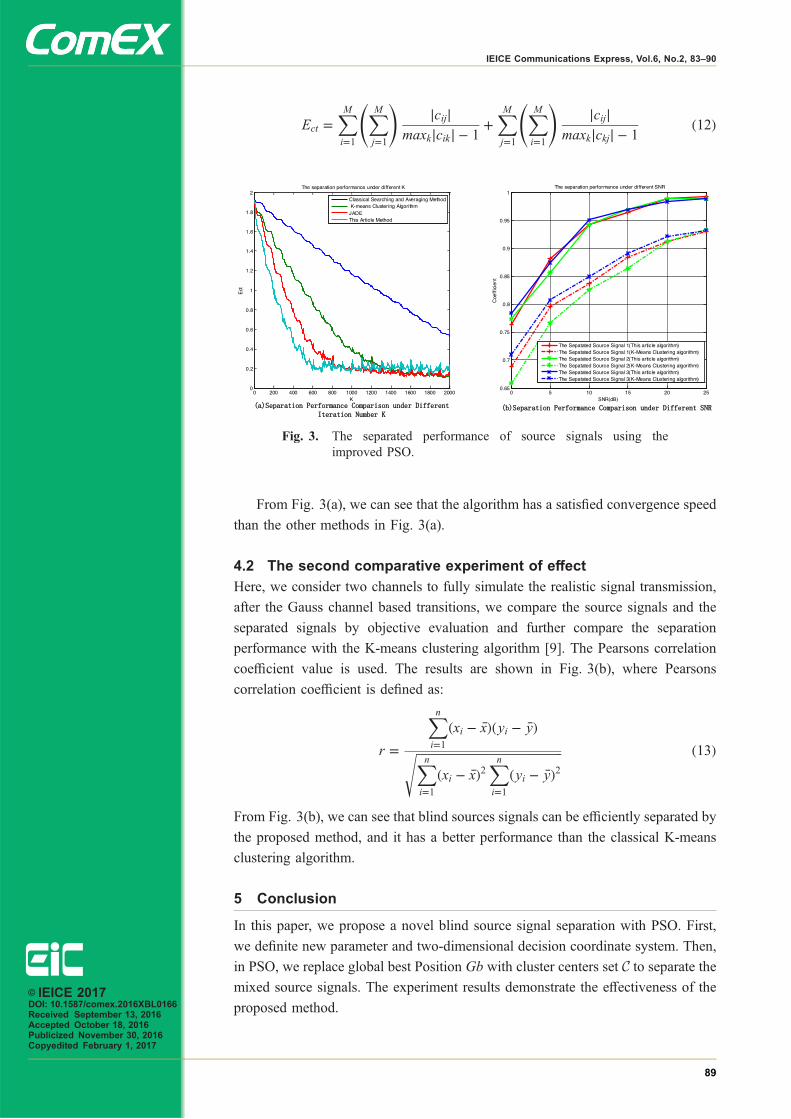
4.1 The first comparative experiment of effect
In order to show better performance of the proposed algorithm, we compare the
convergence speed with other algorithms. The Ect value is used. The results are
shown in Fig. 3(a), the horizontal axis is iteration number and the vertical axis is
the value of Ect, where Ect is defined as:
Fig. 2. The class of the sampling points.
© IEICE 2017DOI: 10.1587/comex.2016XBL0166Received September 13, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
88
IEICE Communications Express, Vol.6, No.2, 83–90
Ect ¼XMi¼1
XMj¼1
!jcijj
maxkjcik j � 1þXMj¼1
XMi¼1
!jcijj
maxkjckjj � 1ð12Þ
From Fig. 3(a), we can see that the algorithm has a satisfied convergence speed
than the other methods in Fig. 3(a).
4.2 The second comparative experiment of effect
Here, we consider two channels to fully simulate the realistic signal transmission,
after the Gauss channel based transitions, we compare the source signals and the
separated signals by objective evaluation and further compare the separation
performance with the K-means clustering algorithm [9]. The Pearsons correlation
coefficient value is used. The results are shown in Fig. 3(b), where Pearsons
correlation coefficient is defined as:
r ¼
Xni¼1
ðxi � �xÞðyi � �yÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiXni¼1
ðxi � �xÞ2Xni¼1
ðyi � �yÞ2s ð13Þ
From Fig. 3(b), we can see that blind sources signals can be efficiently separated by
the proposed method, and it has a better performance than the classical K-means
clustering algorithm.
5 Conclusion
In this paper, we propose a novel blind source signal separation with PSO. First,
we definite new parameter and two-dimensional decision coordinate system. Then,
in PSO, we replace global best Position Gb with cluster centers set C to separate the
mixed source signals. The experiment results demonstrate the effectiveness of the
proposed method.
Fig. 3. The separated performance of source signals using theimproved PSO.
© IEICE 2017DOI: 10.1587/comex.2016XBL0166Received September 13, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
89
IEICE Communications Express, Vol.6, No.2, 83–90

Acknowledgments
This work is fully supported by a grant from the national High Technology
Research and development Program of China (863 Program) (No.
2012AA01A502), and National Natural Science Foundation of China
(No. 61179006), and Science and Technology Support Program of Sichuan
Province (No. 2014GZX0004).
© IEICE 2017DOI: 10.1587/comex.2016XBL0166Received September 13, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
90
IEICE Communications Express, Vol.6, No.2, 83–90

Corrupted encoded datadetection for a CELP decoder
Hiroyuki Ehara1a), Takuya Kawashima2, and Toshiaki Sakurai11 Panasonic AVC Networks Company, Panasonic Corporation,
600 Saedo-cho, Tsuzuki-ku, Yokohama, Kanagawa 224–8539, Japan2 Panasonic System Networks R&D Lab. Co., Ltd.,
7F Confidence Kanazawa, 1–1–3 Sainen, Kanazawa, Ishikawa 920–0024, Japan
Abstract: Undetectable data corruption in wireless communication links
can occur in some cases, including cases in which a ciphering algorithm can
fail to generate the same keystream for encryption at a receiver side as it does
for a sender side. In wireless speech communication, such corruption might
trigger an explosion of decoded sound, which might in turn hurt a user’s ear.
This article presents a simple algorithm for detecting corruption for a typical
code-excited linear-prediction (CELP) speech decoder. The algorithm re-
quires no additional bits for corruption detection, but detects it by monitoring
the amplitude ratio of decoded adaptive and fixed excitation signals in CELP.
Its practicality is demonstrated by simulation.
Keywords: error detection, speech codec, CELP
Classification: Multimedia Systems for Communications
References
[1] 3GPP, “6.6.3 Ciphering method” in 3GPP TS 33.102 V12.2.0, p. 39, 2014.[2] N. Gortz, “Zero Redundancy Error Protection for CELP Speech Codecs,” Proc.
EuroSpeech’97, vol. 3, pp. 1283–1286, 1997.[3] M. R. Schroeder and B. S. Atal, “Code excited linear prediction: High quality
speech at low bit rates,” Proc. IEEE ICASSP-85, pp. 937–940, 1985. DOI:10.1109/ICASSP.1985.1168147
[4] J.-P. Adoul, P. Mabilleau, M. Delprat, and S. Morissette, “Fast CELP coding onalgebraic codes,” Proc. IEEE ICASSP-87, pp. 1957–1960, 1987. DOI:10.1109/ICASSP.1987.1169413
[5] T. Kawashima and H. Ehara, “Low bit-rate CELP decoder with corruptedencoded-data detection,” Proc. IEICE General Conference, D-14-18, Mar. 2016(in Japanese).
[6] P. J. Erdelsky, “Rijndael Encryption Algorithm,” http://www.efgh.com/software/rijndael.htm.
1 Introduction
In wireless communication systems, error protection is commonly applied to avoid
substantial degradation in communication quality caused by any error in commu-
nication links. However, in some cases, such errors are undetectable. For example,
© IEICE 2017DOI: 10.1587/comex.2016XBL0172Received September 27, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
91
IEICE Communications Express, Vol.6, No.2, 91–96

some input parameters to a cipher algorithm can differ between the sender side and
the receiver side. Synchronization of an encryption keystream generated by the
cipher algorithm might be lost at the decoder side. This problem is known to occur
in some mobile communication systems using the ciphering method described in
3GPP specifications [1], which use sequence numbers counted separately at each
of the sender and receiver sides as input parameters. In this case, encoded data
received by a decoder are corrupted completely, but they are received as correct
encoded data. In speech communication systems, such corruption might trigger an
explosion of decoded sound, which might in turn hurt a user’s ear when headphone-
type listening devices are used. It is therefore desirable to detect such sound-
explosion-causing errors using corrupted data with no additional information.
An earlier study used the difference of consecutive decoded parameters for such
“zero-redundant” error detection [2]. This approach is based on the assumptions
that parameters decoded without error have some correlation in time, and that the
correlation diminishes if the data include errors. Errors can be detected by checking
whether the difference is outside of a predetermined range. A benefit of this
approach is that it enables parameter-by-parameter error detection, although some
wrong error detection is tolerated because the assumption is not always true. Our
objective is detecting corrupted data that might trigger an explosion of decoded
sound. We started with an investigation of the source of the sound explosion and
found that it was more appropriate for our objective to check excitation signals
reconstructed from the decoded parameters rather than the decoded parameters
themselves. By exploiting the excitation signals, we inferred a criterion that was
effective for detecting explosions. Using this criterion, we developed an algorithm
for corrupted encoded data detection (CED) used in a code-excited linear-prediction
(CELP) decoder. Its practicability is demonstrated by experimental simulation.
2 CELP decoder with corrupted encoded data detection
CELP [3], an algorithm for encoding speech signals at low bit-rates, is deployed
widely in wireless speech communication systems. It is based on a speech synthesis
model. Fig. 1 presents a block diagram of a CELP decoder with CED. After an
excitation signal is passed through a linear predictive synthesis filter, a synthesized
speech signal is outputted from the synthesis filter. Summing an adaptive codebook
(ACB) vector and a fixed-codebook (FCB) vector generates the excitation signal.
Fig. 1. Block diagram of a CELP decoder with CED.
© IEICE 2017DOI: 10.1587/comex.2016XBL0172Received September 27, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
92
IEICE Communications Express, Vol.6, No.2, 91–96

The ACB, a buffered sequence of the excitation signal generated in the past, is used
to represent periodic components in the excitation signal. The FCB contains several
pre-fixed vectors. Such vectors can be represented in various ways. For example, in
widely deployed algebraic CELP (ACELP) [4], the pre-fixed vectors are generated
by combining some unit pulses located at pre-determined positions. The CED is
performed using both ACB and FCB vectors. Once the corrupted encoded data are
detected, attenuation is applied to the excitation signal input to the synthesis filter to
avoid explosion of synthesized sound [5]. The CED algorithm and the attenuation
of the excitation signal are explained herein in the following sections.
3 Criterion for detecting corrupted encoded data
The objective of this study is detecting corrupted encoded data for avoiding sound
explosion generation. Therefore, we have started with investigation of the sources
of sound explosions generated from corrupted encoded data. For generating
corrupted encoded data, an Advanced Encryption Standard (AES) cipher is used:
the Rijndael Encryption Algorithm [6]. A CELP-encoded bitstream is ciphered
using 256-bit AES. Then the ciphered bitstream is decrypted using a different
keystream from that used in encryption. The decrypted bitstream is then decoded by
the CELP decoder. Typical sound-explosion cases are selected and investigated
closely. Results show that the amplitude of the ACB vector (ACV) tends to be
remarkably large in those cases. However, a remarkable ACV amplitude is found
even in error-free conditions. Therefore, one cannot simply rely on the ACV
amplitude to detect sound-explosion cases. In our experience, the ratio between
the ACV amplitude and corresponding FCB vector (FCV) amplitude is useful as
a criterion for detecting abnormalities causing possible sound explosion. In CELP,
in general, the periodic component is represented with ACV. The non-periodic
component is represented with FCV. However, even if the input signal is a perfectly
periodic signal, FCV cannot be zero because a quantization error of the periodic
component always exists. Therefore, a practical upper limit of the ACV/FCV
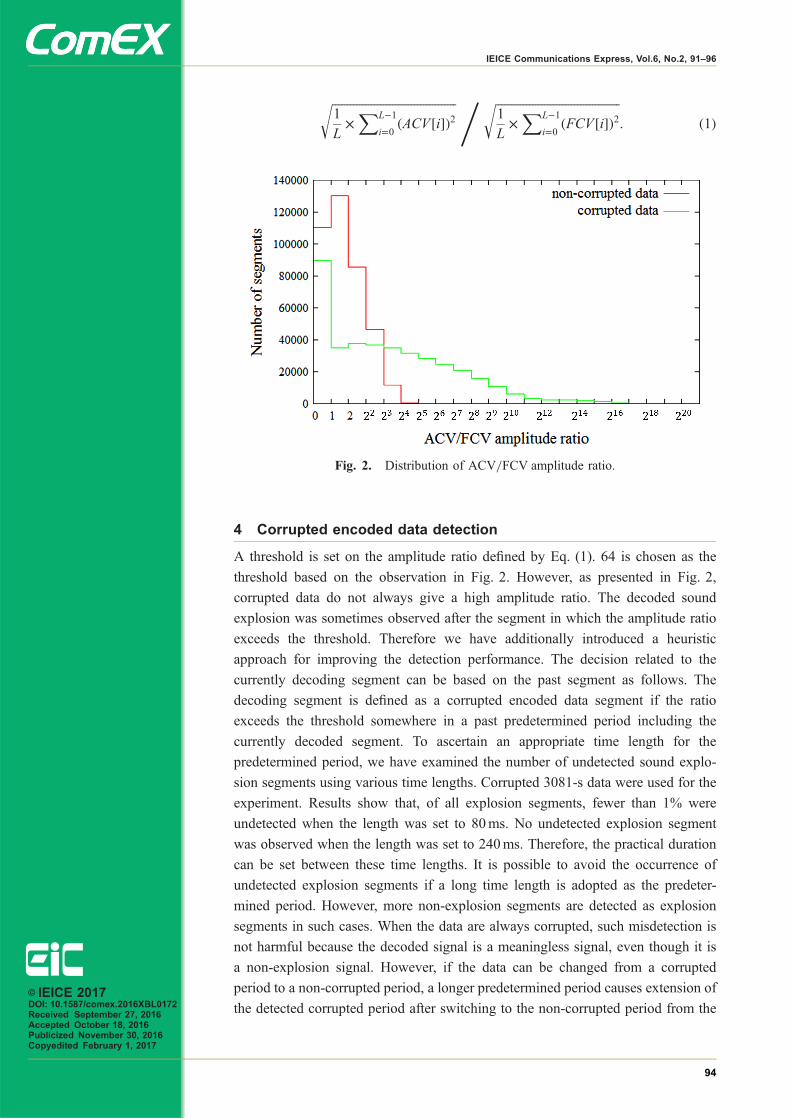
amplitude ratio must exist. We have examined the ACV/FCVamplitude ratio using
an approximately 3081-s database containing 8-language 800 short sentences with
no background noise, 8-language 80 short sentences with various background
noises (e.g. street noise, babble noise, car noise, train noise), 8-language 160 short
sentences at different input levels, and 13 music samples. Results show that the
ACB/FCB amplitude ratio never exceeds 50 for our developed CELP case.
However, when the corrupted encoded data are decoded, the ACV/FCV amplitude
ratio frequently exceeds 100. Fig. 2 presents histograms of the ACB/FCB ampli-
tude ratio for both cases. From Fig. 2, it is apparent that corrupted encoded data
segments are detectable by checking whether the ACV/FCV amplitude ratio
exceeds, for example, 64. Although the sound explosion is not always observed
in such cases, the amplitude ratio is useful as a reliable criterion for detecting the
corrupted encoded data. The amplitude ratio is defined by Eq. (1). ACV½i� and
FCV½i� respectively signify the decoded ACV and the decoded FCV, which are
scaled by corresponding quantized gains. L represents the vector length.© IEICE 2017DOI: 10.1587/comex.2016XBL0172Received September 27, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
93
IEICE Communications Express, Vol.6, No.2, 91–96
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1
L�XL�1
i¼0 ðACV½i�Þ2
r , ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1
L�XL�1
i¼0 ðFCV½i�Þ2
r: ð1Þ
4 Corrupted encoded data detection
A threshold is set on the amplitude ratio defined by Eq. (1). 64 is chosen as the
threshold based on the observation in Fig. 2. However, as presented in Fig. 2,
corrupted data do not always give a high amplitude ratio. The decoded sound
explosion was sometimes observed after the segment in which the amplitude ratio
exceeds the threshold. Therefore we have additionally introduced a heuristic
approach for improving the detection performance. The decision related to the
currently decoding segment can be based on the past segment as follows. The
decoding segment is defined as a corrupted encoded data segment if the ratio
exceeds the threshold somewhere in a past predetermined period including the
currently decoded segment. To ascertain an appropriate time length for the
predetermined period, we have examined the number of undetected sound explo-
sion segments using various time lengths. Corrupted 3081-s data were used for the
experiment. Results show that, of all explosion segments, fewer than 1% were
undetected when the length was set to 80ms. No undetected explosion segment
was observed when the length was set to 240ms. Therefore, the practical duration
can be set between these time lengths. It is possible to avoid the occurrence of
undetected explosion segments if a long time length is adopted as the predeter-
mined period. However, more non-explosion segments are detected as explosion
segments in such cases. When the data are always corrupted, such misdetection is
not harmful because the decoded signal is a meaningless signal, even though it is
a non-explosion signal. However, if the data can be changed from a corrupted
period to a non-corrupted period, a longer predetermined period causes extension of
the detected corrupted period after switching to the non-corrupted period from the
Fig. 2. Distribution of ACV/FCV amplitude ratio.
© IEICE 2017DOI: 10.1587/comex.2016XBL0172Received September 27, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
94
IEICE Communications Express, Vol.6, No.2, 91–96
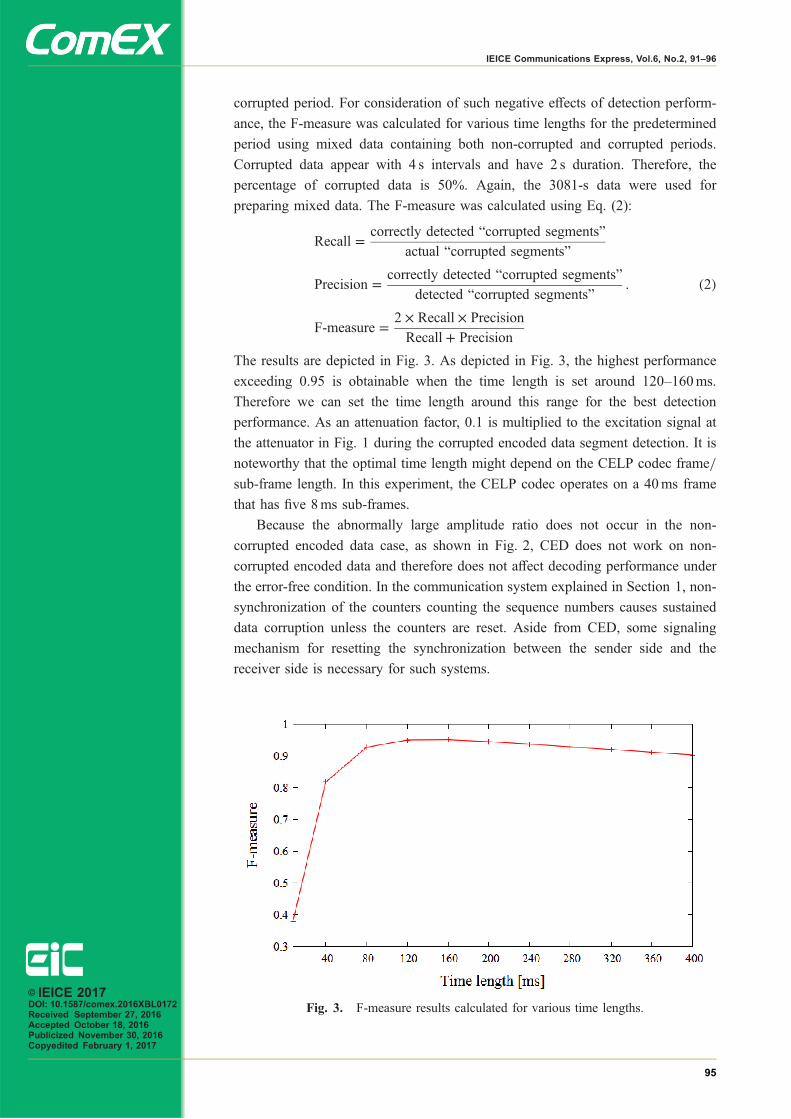
corrupted period. For consideration of such negative effects of detection perform-
ance, the F-measure was calculated for various time lengths for the predetermined
period using mixed data containing both non-corrupted and corrupted periods.
Corrupted data appear with 4 s intervals and have 2 s duration. Therefore, the
percentage of corrupted data is 50%. Again, the 3081-s data were used for
preparing mixed data. The F-measure was calculated using Eq. (2):
Recall ¼ correctly detected “corrupted segments”
actual “corrupted segments”
Precision ¼ correctly detected “corrupted segments”
detected “corrupted segments”: ð2Þ
F-measure ¼ 2 � Recall � Precision
Recall þ Precision
The results are depicted in Fig. 3. As depicted in Fig. 3, the highest performance
exceeding 0.95 is obtainable when the time length is set around 120–160ms.
Therefore we can set the time length around this range for the best detection
performance. As an attenuation factor, 0.1 is multiplied to the excitation signal at
the attenuator in Fig. 1 during the corrupted encoded data segment detection. It is
noteworthy that the optimal time length might depend on the CELP codec frame/
sub-frame length. In this experiment, the CELP codec operates on a 40ms frame
that has five 8ms sub-frames.
Because the abnormally large amplitude ratio does not occur in the non-
corrupted encoded data case, as shown in Fig. 2, CED does not work on non-
corrupted encoded data and therefore does not affect decoding performance under
the error-free condition. In the communication system explained in Section 1, non-
synchronization of the counters counting the sequence numbers causes sustained
data corruption unless the counters are reset. Aside from CED, some signaling
mechanism for resetting the synchronization between the sender side and the
receiver side is necessary for such systems.
Fig. 3. F-measure results calculated for various time lengths.© IEICE 2017DOI: 10.1587/comex.2016XBL0172Received September 27, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
95
IEICE Communications Express, Vol.6, No.2, 91–96

5 Conclusion
This article proposes a detection algorithm using the amplitude ratio of adaptive-
codebook to fixed-codebook vectors in a code-excited linear prediction (CELP)
decoder for detecting corrupted encoded data segments without sending additional
information for error detection. The algorithm can apply to typical CELP-based
decoders without affecting the performance in an error-free condition. Moreover,
it can be integrated into an ordinary CELP decoding process without requiring a
specific signaling mechanism. It can therefore be introduced independently to any
decoder equipment without changing the entire communication system chain.
© IEICE 2017DOI: 10.1587/comex.2016XBL0172Received September 27, 2016Accepted October 18, 2016Publicized November 30, 2016Copyedited February 1, 2017
96
IEICE Communications Express, Vol.6, No.2, 91–96

Decoupling stub-loadedparallel dipole array withorthogonal polarization
Kohei Omotea), Kazuhiro Honda, and Kun LiGraduate School of Engineering, Toyama University,
3190 Gofuku, Toyama-shi, Toyama 930–8555, Japan
Abstract: This paper presents a novel design for a two-element stub-loaded
dipole array antenna. The purpose is to obtain the decoupling and orthogonal
polarization characteristics using a small antenna configuration. A quarter-
wavelength stub loaded on one side of the two elements is operated as a
phase shifter to create the opposite phase of current distribution. Moreover,
the quarter-wavelength stub works as an orthogonal dipole antenna because
the in-phase currents are enhanced on the stub, leading to orthogonal
directivity. The results show that well-defined isolation and orthogonal
polarization directivity can be achieved using the proposed antenna.
Keywords: orthogonal polarization, decoupling, stub, dipole array
Classification: Antennas and Propagation
References
[1] D. Gesbert, M. Shafi, D. S. Shiu, P. J. Smith, and A. Naguib, “From theory topractice: An overview of MIMO space-time coded wireless systems,” IEEE J.Sel. Areas Commun., vol. 21, no. 3, pp. 281–302, Apr. 2003. DOI:10.1109/JSAC.2003.809458
[2] M. Nakano and H. Arai, “Orthogonal polarization base station antennatechnology at cellular systems and system evaluation,” IEICE Trans. Commun.,vol. J96-B, no. 1, pp. 1–15, Jan. 2013.
[3] D. T. Le, M. Shinozawa, and Y. Karasawa, “Wideband MIMO compact antennaswith tri-polarization,” IEICE Trans. Commun., vol. E94-B, no. 7, pp. 1982–1993, July 2011. DOI:10.1587/transcom.E94.B.1982
[4] K. Omote, H. Sato, K. Li, K. Honda, Y. Koyanagi, and K. Ogawa, “Three-axisdecoupling stub-loaded parallel dipole array with tri-orthogonal polarizationdirectivity,” IEEE iWEM 2015, Hsinchu, pp. 1–2, Nov. 2015. DOI:10.1109/iWEM.2015.7365037
[5] K. Nishizawa, H. Okegawa, H. Ohmine, Y. Sunahara, and T. Katagi, “A lineardipole antenna with crank sections suitable for an element operating at a lowerband in dual-band array antennas,” IEICE Trans. Commun., vol. J85-B, no. 6,pp. 932–940, June 2002.
[6] D. M. Pozar, Microwave Engineering, 3rd ed., p. 187, John Wiley & Sons,2005.
[7] FEKO, https://www.feko.info/.
© IEICE 2017DOI: 10.1587/comex.2016XBL0186Received October 19, 2016Accepted November 8, 2016Publicized November 30, 2016Copyedited February 1, 2017
97
IEICE Communications Express, Vol.6, No.2, 97–102

1 Introduction
The multiple-input multiple-output (MIMO) technique was investigated to realize
ultra-high-speed and high-capacity mobile communications [1]. The polarized-
MIMO enhances the channel capacity more effectively compared with the space-
MIMO because of the low correlation between the antenna elements owing to space
orthogonality [2]. However, an orthogonally arranged antenna configuration is
disadvantageous for multi-element compactness because of its large size. There-
fore, miniaturizing the antenna is indispensable [3].
This paper presents a novel design for a two-element stub-loaded dipole array
antenna (SLDA). The feature of this proposal is that it realizes the orthogonal
polarization and decoupling characteristics simultaneously using a small antenna
configuration [4]. The current distribution on the stub generates the radiation
pattern using the common mode, whereas the nonradiation element of the stub-
loaded dipole produces well-defined isolation by using the opposite phase. The
analytical and measured results confirm that well-defined isolation and orthogonal
polarization directivity of SLDA can be achieved.
2 Operating principle of two-element stub-loaded dipole array
The stub structure is generally used to eliminate the undesired current component as
the parallel elements of the stub are nonradiation elements because of the opposite
phase mode [5]. We propose operating a stub as a radiation element with a common
mode in this paper in order to obtain orthogonal directivity.
Fig. 1 shows the operating principle of the two-element SLDA antenna for
realizing the orthogonal polarization and decoupling characteristics simultaneously.
Fig. 1(a) shows the current distribution of a two-element SLDA to illustrate the
orthogonal polarization directivity. The SLDA comprises two parallel dipole
antennas, in which one of the elements is loaded with a quarter-wavelength stub
for creating the opposite phase of the current distribution as a phase shifter.
When the stub-loaded element (Port 1) is excited, the opposite phase of the
current distribution is created with the same amplitude (I1 and �I1) on Element 1.
Thus, Element 1 is a nonradiation element because the currents cancel each other.
In this case, the radiation pattern is similar to that generated by a horizontal dipole
antenna because the in-phase currents I3 flowing on the Element Stub are enhanced
by each other. On the other hand, when the dipole element (Port 2) is excited, the
current of Element 2 (I2) is created. Consequently, the SLDA in Fig. 1(a) can be
treated as two orthogonally arranged dipoles, resulting in orthogonal polarization
directivity contributed by the current I3 on Element Stub and I2 on Element 2.
Fig. 1(b) shows the decoupling mechanism based on the current distribution of
the SLDA in Fig. 1(a). In Fig. 1(b), the separated dipole units on the right side
correspond to Element 1, whereas the single dipole on the left side represents
Element 2. Za12 and Zb
12 show the mutual impedance between Elements 1 and 2 in
the up-side and down-side, respectively.
Eqs. (1) and (2) show the matrices of the two dipoles (Element 1 and Ele-
ment 2) between the voltage V1 to V2, or �V1 to V2.© IEICE 2017DOI: 10.1587/comex.2016XBL0186Received October 19, 2016Accepted November 8, 2016Publicized November 30, 2016Copyedited February 1, 2017
98
IEICE Communications Express, Vol.6, No.2, 97–102

V1
V2
" #¼
Za11 Za
12
Za21 Z22
" #I1
I2
" #ð1Þ
�V1
V2
" #¼ Zb
11 Zb12
Zb21 Z22
" # �I1I2
" #ð2Þ
Eq. (3) is obtained by transforming the plus and minus signs in Eq. (2).
V1
V2
" #¼ Zb
11 �Zb12
�Zb21 Z22
" #I1
I2
" #ð3Þ
The self-impedance and mutual impedance can be obtained by comparing
Eqs. (1) and (3) as shown below, respectively.
Zb11 ¼ Za
11 ð4ÞZb12 ¼ �Za
12 ð5ÞThe self-impedance in Eq. (4) has the same magnitude. The mutual impedance
in Eq. (5) has the same magnitude and opposite sign. Therefore, the total mutual
impedance ZT12 is zero, as expressed by the following equation.
ZT12 ¼ Za
12 þ Zb12 ¼ Za
12 � Za12 ¼ 0 ð6Þ
The isolation S12 depending on the Z parameter is defined in [6] as follows:
S12 ¼ 2ZT12Z0
ðZ11 þ Z0ÞðZ22 þ Z0Þ � ZT12Z
T21
ð7Þ
where Z0 is the load impedance, and Z11 and Z22 are the self-impedances. S12 can
be calculated as zero because ZT12 in Eq. (7) is zero, resulting in a high isolation in
theory.
The orthogonal polarization directivity and decoupling characteristics can be
simultaneously realized based on the two above-mentioned principles using two
linear elements instead of a complicated structure.
3 Design process of two-element stub-loaded dipole array
The simulation of a two-element SLDA was performed on the commercial EM
solver FEKO [7] based on the principles illustrated in Fig. 1. Fig. 2(a) shows the
Port 2
Port1 Element Stub
Element 1Element 2
I1
−I1
I2
I2
xy
zθ
φ
I3 Εφ
Εθ
I3
V2
V1
−V1
−+
I2
I2−+
−+
I1
I1
−I1
−I1bZ12
aZ12
22Z
aZ11
bZ11
(a) Current distribution (b) Decoupling mechanism
Fig. 1. Operating principle of two-element SLDA.
© IEICE 2017DOI: 10.1587/comex.2016XBL0186Received October 19, 2016Accepted November 8, 2016Publicized November 30, 2016Copyedited February 1, 2017
99
IEICE Communications Express, Vol.6, No.2, 97–102

analytical model. It is designed to operate at a frequency of 2GHz. The length of
the dipole antenna is 7.5 cm (�=2 at 2GHz). The purpose of this simulation is to
determine the optimum dimension of the SLDA, including the stub length L and
element separation d, as shown in Fig. 2(a). The separation of Element Stub is
2mm. The element radius is 0.5mm.
Fig. 2(b) shows the isolation characteristics between Ports 1 and 2 for different
element separations d as a function of the phase difference. The phase difference
��, which depends on the stub length L, can be calculated by the following
equation.
�� ¼ 2L
�� 2� ð8Þ
In Fig. 2(b), the red, blue, and black lines show the cases in which the values of
element separation d are 5mm, 10mm, and 20mm, respectively.
In Fig. 2(b), the current flowing on the stub-loaded element has a distribution
opposite to that on the dipole element when the length of the stub is L ¼ �=4
(�� ¼ �), which is equal to that on an orthogonal dipole array antenna. Therefore,
an isolation greater than 30 dB can be achieved at 2GHz regardless of the antenna
separation d. As shown in Fig. 2(b), a high isolation of −32.5 dB is achieved when
the separation d is 5mm (0:03� at 2GHz).
On the other hand, the current flowing on the stub-loaded element has the same
distribution as that on the dipole element when L ¼ 0 (�� ¼ 0) or L ¼ �=2
(�� ¼ 2�), which equals that on the parallel dipole array antenna. Thus, the
currents of the two elements enhance each other, which eventually degrades the
isolation performance compared with that when L ¼ �=4.
The optimum dimension of the SLDA is determined at L ¼ �=4 and d ¼ 5mm
based on the simulation result shown in Fig. 2(b).
4 Measurement results
Fig. 3(a) shows the measurement setup of the two-element SLDA. As a preliminary
experiment, the dipole antenna with a feed structure of balun is used. Since the
balun is the additional part compared with the analytical model, they are orthog-
2mm
d
7.5cmL
Port 2 Port1x
y
zθ
φ
Element 1Element 2
Element Stub
d=λ/32=5mmd=λ/16=10mmd=λ/8=20mm
0 π 2π0 λ/4 λ/2
Δφ [rad]Length of Stub
S 21
[dB
]
(a) Antenna configuration (b) Isolation characteristics
Fig. 2. Design process of two-element stub-loaded dipole array.
© IEICE 2017DOI: 10.1587/comex.2016XBL0186Received October 19, 2016Accepted November 8, 2016Publicized November 30, 2016Copyedited February 1, 2017
100
IEICE Communications Express, Vol.6, No.2, 97–102

onally-arranged along �x and �y-axis, respectively, in order to reduce the
undesired electromagnetic impact on radiation elements. The length of the stub is
3.75 cm (¼ �=4 at 2GHz). The element separation d between two elements is 5mm.
Fig. 3(b) shows the measured impedance characteristics of the SLDA. When
the specific port is excited, the other port is terminated with 50Ω. In Fig. 3(b), the
red line shows the result of the stub-loaded element (Port 1) and the blue line shows
that of the dipole (Port 2). As shown in Fig. 3(b), the impedance of Ports 1 and 2 at
Element 1Port1
Element 2Port2
x y
zθ
L=3.75cm
d=5mm
Balun
2mm 2GHz
1.8GHz
2.2GHz
2.2GHz
1.8GHz2GHz
Port2
Port1
Port1Port2
−26dB
−3dB
SLDA
dipole array
23dB
Solid Line: Measured ResultBroken Line: Analytical Result
zx-plane
EθEφ
Port 1
Port 2
f=2GHz
zy-plane xy-planez
z
z
z
x
x
y
y
x
x
y
y[dBd]
10
0
-10
-20
-10
0
10
[dBd]
10 0 -10 -20 -10 0 10
10 0 -10 -20 -10 0 1010
0
-10
-20
-10
0
10
(a) Measurement setup (b) Impedance characteristics
(c) S21 characteristics
(d) Orthogonal polarization directivity
Fig. 3. Measurement results of the proposed two-element stub-loadeddipole array.
© IEICE 2017DOI: 10.1587/comex.2016XBL0186Received October 19, 2016Accepted November 8, 2016Publicized November 30, 2016Copyedited February 1, 2017
101
IEICE Communications Express, Vol.6, No.2, 97–102

2GHz is 79:4 þ j0:2Ω and 92:6 � j21:9Ω, respectively. Therefore, the VSWR of
the two elements are less than 2.5, indicating that there is no significant impedance
mismatch when the stub is loaded.
Fig. 3(c) shows the S21 characteristic of the SLDA. The red lines show the
proposed SLDA whereas the blue lines show the two-element vertical dipole array
designed at 2GHz. The solid and broken lines indicate the measured and analytical
results, respectively. As shown in Fig. 3(c), the SLDA can achieve an improvement
of 23 dB in the isolation at 2GHz compared with the result obtained using the
dipole array antenna.
Fig. 3(d) shows the radiation characteristics considering the mismatch loss. The
solid and broken lines indicate the measured and analytical results, respectively.
The blue line shows the E�-component and the red line indicates E�-component.
In Fig. 3(d), an eight-figure radiation pattern with the E�- and E�-components
in the zy- and xy-planes, respectively, can be observed when Port 1 is excited,
whereas an omnidirectional radiation pattern with the E�-component is obtained in
the zx-plane. Therefore, the radiation pattern of Port 1 is similar to a horizontal
dipole arranged along the y-axis. When Port 2 is excited, the radiation pattern is
similar to that of a vertical dipole arranged along the z-axis. These features indicate
that the proposed SLDA can realize the orthogonal polarization directivity.
In Fig. 3(d), the measurement results of the main polarization agree well with
the analytical results in all the planes. However, undesired polarization directivity
is observed. This phenomenon can be attributed to the electromagnetic coupling
between the element and the balun, and the radiation of the unnecessary current
caused by the difference in element length.
5 Conclusion
This paper presents a design example of two-element SLDA. The measured and
analytical results show that well-defined isolation and orthogonal polarization
directivity can be simultaneously realized with a small antenna configuration using
the proposed SLDA. As a future work, we are developing a practical antenna with
low-profile based on the design principle presented in this paper.
© IEICE 2017DOI: 10.1587/comex.2016XBL0186Received October 19, 2016Accepted November 8, 2016Publicized November 30, 2016Copyedited February 1, 2017
102
IEICE Communications Express, Vol.6, No.2, 97–102

Temperature sensing usingan optical time domainreflectometer and mechanicallong-period fiber gratingsfabricated from a heat-shrinkable tube
Yasuhiro Tsutsumia), Masaharu Ohashi, and Yuji MiyoshiDepartment of Electrical and Information Systems, Graduate school of engineering,
Osaka Prefecture University, 1–1 Gakuen-cho, Naka Sakai, Osaka 599–8531, Japan
Abstract: We develop a simple temperature sensing using an optical time
domain reflectometer (OTDR) and a mechanical long-period fiber grating
(LPFG) fabricated from a heat-shrinkable tube and a metric screw. The
resonance loss of the fabricated LPFG is strongly dependent on temperature
as temperature-dependent heat-shrinkage of the tube produces a change in
the pressure applied to the fiber. In our proposed temperature sensor, the
LPFG insertion loss due to a change in the pressure applied to the fiber
is measured using an OTDR with a resonance wavelength. Both single-
point and multi-point temperature sensing is successfully demonstrated
experimentally.
Keywords: long period fiber gratings, optical time domain reflectometer,
temperature sensing
Classification: Sensing
References
[1] S. Nam, C. Zhan, J. Lee, C. Hahn, K. Reichard, P. Ruffin, K.-L. Deng, and S.Yin, “Bend-insensitive ultra short long-period gratings by the electric arcmethod and their applications to harsh environment sensing and communica-tion,” Opt. Express, vol. 13, pp. 731–737, 2005. DOI:10.1364/OPEX.13.000731
[2] H. Xuan, W. Jin, and M. Zhang, “CO2 laser induced long period gratings inoptical microfibers,” Opt. Express, vol. 17, pp. 21882–21890, 2009. DOI:10.1364/OE.17.021882
[3] S. W. James and R. P. Tatam, “Optical fibre long-period fiber grating sensors:characteristics and application,” Meas. Sci. Technol., vol. 14, no. 5, pp. R49–R61, 2003. DOI:10.1088/0957-0233/14/5/201
[4] V. Bhatia and A. M. Vengsarkar, “Optical fiber long-period fiber gratingsensors,” Opt. Lett., vol. 21, no. 9, pp. 692–694, 1996. DOI:10.1364/OL.21.000692
[5] Y. Wang, “Review of long period fiber gratings written by CO2 laser,” J. Appl.
© IEICE 2017DOI: 10.1587/comex.2016XBL0189Received October 31, 2016Accepted November 24, 2016Publicized December 8, 2016Copyedited February 1, 2017
103
IEICE Communications Express, Vol.6, No.2, 103–108

Phys., vol. 108, pp. 081101, 2010. DOI:10.1063/1.3493111[6] L. Drozin, P. Y. Fonjallaz, and L. Stensland, “Long-period fiber gratings written
by CO2 exposure of H2 loaded standard fibers,” Electron. Lett., vol. 36,pp. 742–744, 2000. DOI:10.1049/el:20000510
[7] G. Rego, O. Okhotnikov, E. Dianov, and V. Sulimov, “High-temperaturestability of long-period fibre gratings using an electric arc,” J. LightwaveTechnol., vol. 19, pp. 1574–1579, 2001. DOI:10.1109/50.956145
[8] P. Palai, M. N. Satyanarayan, M. Das, K. Thyagarajan, and B. P. Pal,“Characterization and simulation of long period gratings fabricated usingelectric discharge,” Opt. Commun., vol. 193, pp. 181–185, 2001. DOI:10.1016/S0030-4018(01)01231-7
[9] S. Savin, M. J. F. Digonnet, G. S. Kino, and H. J. Shaw, “Tunable mechanicallyinduced long-period fiber gratings,” Opt. Lett., vol. 25, pp. 710–712, 2000.DOI:10.1364/OL.25.000710
[10] H. Sakata and K. Yamashita, “Magnetic-force-induced long-period fibergratings,” Opt. Lett., vol. 37, pp. 1250–1252, 2012. DOI:10.1364/OL.37.001250
[11] Y. Tsutsumi, M. Ohashi, and Y. Miyoshi, “Temperature-sensitive mechanicalLPFG using contractive force of heat-shrinkable tube,” Opt. Fiber Technol.,vol. 19, pp. 55–59, 2013. DOI:10.1016/j.yofte.2012.11.002
[12] T. Erdogan, “Fiber grating spectra,” J. Lightwave Technol., vol. 15, no. 8,pp. 1277–1294, 1997. DOI:10.1109/50.618322
1 Introduction
A long-period fiber grating (LPFG) is formed in a single-mode fiber, which enables
light to be coupled from the fiber core to selected cladding modes at specific
resonance wavelengths. LPFGs have been extensively investigated for use in
optical communication and sensing applications because of their sensitivity to
strain, temperature, and refractive index [1, 2, 3].
Numerous techniques are available for fabricating LPFGs. Approaches that
have been demonstrated include periodic local heating of the fiber using a CO/CO2
laser [4, 5] or electric arc discharge [6, 7]. Fabrication techniques for mechanically
induced LPFGs have also been reported [8, 9, 10]. Mechanically induced LPFGs
are attractive because of their simplicity, flexibility, and cost effectiveness. In a
recent paper, we proposed a new mechanically induced LPFG fabricated from a
heat-shrinkable tube and a metric screw and reported its temperature characteristics
[11].
In the current study, we propose a simple temperature-sensing using an optical
time domain reflectometer (OTDR) and an LPFG fabricated from a heat-shrinkable
tube and a metric screw. In the proposed sensing, the OTDR senses the temperature
from the LPFG insertion loss that occurs when pressure is applied to the fiber. We
demonstrate successfully both single-point and multi-point temperature sensing.
2 Temperature sensing using an OTDR and LPFG
Fig. 1 shows the temperature measurement configuration. Temperature sensing is
achieved by monitoring the insertion loss at a wavelength near the resonance
wavelength of the LPFG. The transmitted spectrum changes significantly in line
© IEICE 2017DOI: 10.1587/comex.2016XBL0189Received October 31, 2016Accepted November 24, 2016Publicized December 8, 2016Copyedited February 1, 2017
104
IEICE Communications Express, Vol.6, No.2, 103–108
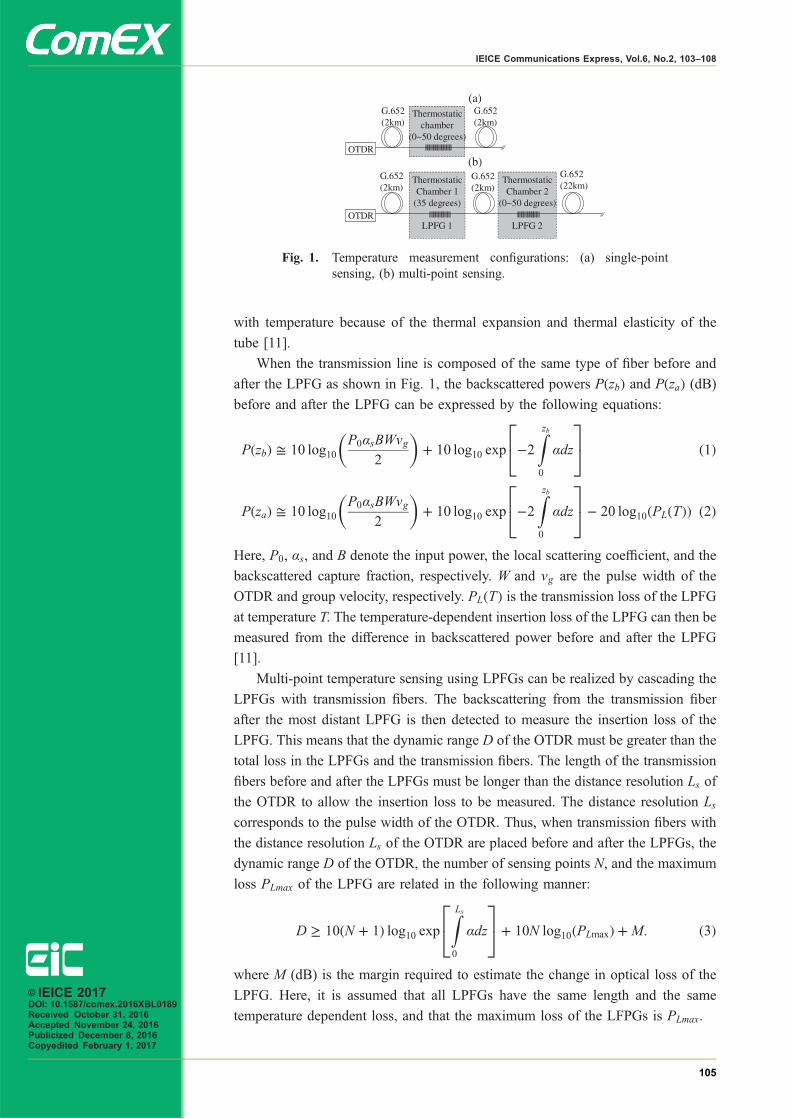
with temperature because of the thermal expansion and thermal elasticity of the
tube [11].
When the transmission line is composed of the same type of fiber before and
after the LPFG as shown in Fig. 1, the backscattered powers PðzbÞ and PðzaÞ (dB)before and after the LPFG can be expressed by the following equations:
PðzbÞ ffi 10 log10P0�sBWvg
2
� �þ 10 log10 exp �2
Zzb0
�dz
24
35 ð1Þ
PðzaÞ ffi 10 log10P0�sBWvg
2
� �þ 10 log10 exp �2
Zzb0
�dz
24
35 � 20 log10ðPLðTÞÞ ð2Þ
Here, P0, �s, and B denote the input power, the local scattering coefficient, and the
backscattered capture fraction, respectively. W and vg are the pulse width of the
OTDR and group velocity, respectively. PLðTÞ is the transmission loss of the LPFG
at temperature T. The temperature-dependent insertion loss of the LPFG can then be
measured from the difference in backscattered power before and after the LPFG
[11].
Multi-point temperature sensing using LPFGs can be realized by cascading the
LPFGs with transmission fibers. The backscattering from the transmission fiber
after the most distant LPFG is then detected to measure the insertion loss of the
LPFG. This means that the dynamic range D of the OTDR must be greater than the
total loss in the LPFGs and the transmission fibers. The length of the transmission
fibers before and after the LPFGs must be longer than the distance resolution Ls of
the OTDR to allow the insertion loss to be measured. The distance resolution Ls
corresponds to the pulse width of the OTDR. Thus, when transmission fibers with
the distance resolution Ls of the OTDR are placed before and after the LPFGs, the
dynamic range D of the OTDR, the number of sensing points N, and the maximum
loss PLmax of the LPFG are related in the following manner:
D � 10ðN þ 1Þ log10 expZLs0
�dz
24
35 þ 10N log10ðPLmaxÞ þM: ð3Þ
where M (dB) is the margin required to estimate the change in optical loss of the
LPFG. Here, it is assumed that all LPFGs have the same length and the same
temperature dependent loss, and that the maximum loss of the LFPGs is PLmax.
(a)
(b)
Fig. 1. Temperature measurement configurations: (a) single-pointsensing, (b) multi-point sensing.
© IEICE 2017DOI: 10.1587/comex.2016XBL0189Received October 31, 2016Accepted November 24, 2016Publicized December 8, 2016Copyedited February 1, 2017
105
IEICE Communications Express, Vol.6, No.2, 103–108

The optical loss of the LPFG fabricated from a heat-shrinkable tube and a
metric screw comprises losses caused by periodic refractive index modulation and
by random microbending [11]. The microbending loss is negligible compared with
the loss from periodic refractive index modulation [11]. Thus, the optical loss PL at
the resonance wavelength of the LPFG can be expressed as follows [12]:
PL ffi sin2ð� lÞ: ð4Þwhere κ and l are the coupling coefficient and the length of the LPFG, respectively.
The design of the LPFG sensor was based on Eqs. (3) and (4).
Next, we describe how the number of sensors and the distance range for
multipoint sensing were determined. When the pulse width of the OTDR was set to
1 µs, Ls was found to be 0.1 km. We assumed the maximum loss PLmax of the LPFG,
the dynamic range of the OTDR, the optical loss of the fiber, and the margin M to
be 1.4 dB, 32 dB, 0.2 dB/km, and 15 dB, respectively. From Eq. (3), the maximum
number of sensing points N was found to be 11. The sensing distance range was,
therefore, 2.2 km (0:2 � 11).
3 Experimental results
Fig. 1(a) shows the experimental setup used to measure the insertion loss of the
LPFG at the temperature T. We used a commercially available metric screw (M3)
with a pitch Λ of 500µm, a length of 5 cm, and a diameter of 3mm. An LPFG was
spliced between two optical fiber bobbins with a fiber length of 2 km (ITU-T G.652
fibers), and placed in a thermostatic chamber. The temperature was then changed
from 0 to 50 °C. An OTDR (Agilent E6003C) was used to derive the LPFG
insertion loss 10 log10ðPLÞ (dB) from the backscattered power distribution. The
OTDR wavelength was set at 1,555 nm while taking the resonance wavelength of
the LPFG into account. The averaging time was 10 s and the pulse width was
300 ns, corresponding to a spatial resolution of 30m.
Fig. 2(a) shows the temperature dependence of the backscattered power dis-
tributions of the fiber link containing the LPFG. It can be seen that the back-
scattered power after the LPFG changed as the temperature in the thermostatic
chamber changed. The backscattered power variation before and after the LPFG,
corresponding to the insertion loss, was dependent on the temperature. This is
because the resonance loss is also temperature dependent [11].
Fig. 3(a) shows the relationship between the natural logarithm of the insertion
loss lnð10 log10ðPLÞÞ of the LPFG and the temperature T. The insertion loss of the
LPFG fabricated from a heat-shrinkable tube showed a good fit with the exponen-
tial temperature function [11]. We, therefore, calculated the natural logarithm of
the insertion loss. The open and filled circles show the insertion loss of the LPFG in
the heating and cooling cycles, respectively. Measurements were taken three times
in each cycle. The solid line was linearly fitted to the experimental data, measured
in the heating cycle. It can be seen that the natural logarithm of the LPFG insertion
loss decreased in direct proportion to the temperature. The experimental temper-
ature dependence of the insertion loss PL can be expressed as follows:
lnð10 log10ðPLÞÞ ¼ �0:0452 T þ 0:160 ð5Þ© IEICE 2017DOI: 10.1587/comex.2016XBL0189Received October 31, 2016Accepted November 24, 2016Publicized December 8, 2016Copyedited February 1, 2017
106
IEICE Communications Express, Vol.6, No.2, 103–108

This allows the temperature T to be estimated from the natural logarithm of the
insertion loss. The temperature in the thermostatic chamber was estimated from the
insertion loss using Eq. (5), as shown in Fig. 2(a).
The temperature T was obtained as follows:
T ¼ ð0:160 � lnð10 log10ðPLÞÞÞ=0:0452 ð6ÞWe defined the estimated temperature difference as the difference between the
temperature in the thermostatic chamber and the estimated temperature obtained
by substituting the measured insertion loss into Eq. (6). Across six measurements,
the difference between the measured and estimated temperature was within 2 °C.
(a)
(b)
Fig. 2. Backscattered power distribution of the fiber link: (a) single-point sensing, (b) multi-point sensing.
(a)
(b)
Fig. 3. Natural logarithm of insertion losses of LPFGs: (a) single-pointsensing, (b) multi-point sensing.
© IEICE 2017DOI: 10.1587/comex.2016XBL0189Received October 31, 2016Accepted November 24, 2016Publicized December 8, 2016Copyedited February 1, 2017
107
IEICE Communications Express, Vol.6, No.2, 103–108

To investigate multi-point sensing, the temperatures of a fiber link comprising
two LPFGs (LPFG1 and LPFG2) were measured, as shown in Fig. 1(b). The
lengths of LPFG1 and LPFG2 were 5.3 cm and 4.0 cm, respectively. Both were
placed in thermostatic chambers. LPFG1 was kept at a constant 35 °C, while
LPFG2 was heated from 0 to 50 °C. The backscattered power distribution was
measured at the different temperatures of LPFG2 using the OTDR at a pulse width
of 1 µs and an averaging time of 10 s.
Fig. 2(b) shows the backscattered power distributions of the fiber link contain-
ing the two LPFGs. The backscattered power difference before and after LPFG1
was almost unchanged because the temperature was kept constant. By contrast, the
backscattered power difference before and after LPFG2 decreased as the temper-
ature increased.
Fig. 3(b) shows the natural logarithm of the insertion losses of LPFG1 and
LPFG2. Dots represent the natural logarithm of the insertion loss of LPFG1, at
constant temperature, and the open circles represent that of LPFG2, at temperatures
ranging from 0 to 50 °C. It can be seen that the insertion loss of LPFG1 was almost
unchanged, whereas the insertion loss of LPFG2 changed in line with the temper-
ature. This confirmed that the maximum loss of the LPFG could be varied by
changing the length of the LPFG. The difference between the measured temperature
in thermostatic chamber 2 and the estimated temperature was within 2 °C, and the
experimental results showed good repeatability. This confirmed that the estimation
of temperature distributions was possible using our proposed method.
4 Conclusions
We have proposed a simple and cost-effective temperature sensing based on a
mechanical LPFG fabricated from a heat-shrinkable tube and a metric screw, both
of which are commercially available. We have confirmed that the insertion loss of
the LPFG measured using a conventional OTDR is temperature dependent. Our
proposed technique has been used to measure the temperature of a thermostatic
chamber with an accuracy of 2 °C. Multi-point temperature sensing has then been
investigated, using two LPFGs. As in the single-point temperature measurement
experiment, the accuracy has been found to be within 2 °C. The experimental
results have confirmed the potential use of LPFGs for temperature sensing.
Acknowledgments
The authors would like to thank Dr. I. Yamashita at the Kansai Electric Power Co.,
Inc. for a fruitful discussion and providing us with the thermostatic chamber. This
work was supported by JSPS KAKENHI Grant Number 16K06307.
© IEICE 2017DOI: 10.1587/comex.2016XBL0189Received October 31, 2016Accepted November 24, 2016Publicized December 8, 2016Copyedited February 1, 2017
108
IEICE Communications Express, Vol.6, No.2, 103–108