impact of connection and automation on electrified … - presentations/sae_vecv2015.pdf · impact...
TRANSCRIPT

Impact of Connection and Automation on Electrified Vehicle Energy Consumption
SAE 2015 Vehicle Electrification and Connected Vehicle Technology ForumDecember 04, 2015
Aymeric Rousseau, Pierre Michel, Dominik KarbowskiArgonne National Laboratory
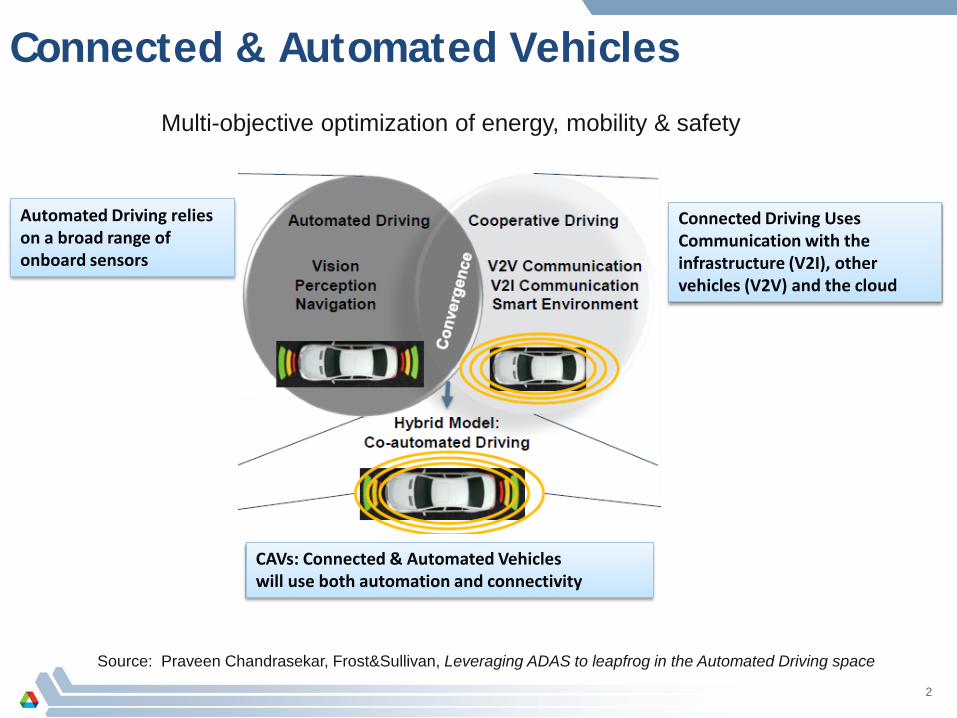
Connected & Automated Vehicles
Source: Praveen Chandrasekar, Frost&Sullivan, Leveraging ADAS to leapfrog in the Automated Driving space
Automated Driving relies on a broad range of onboard sensors
Connected Driving Uses Communication with the infrastructure (V2I), other vehicles (V2V) and the cloud
CAVs: Connected & Automated Vehicleswill use both automation and connectivity
Multi-objective optimization of energy, mobility & safety
2

Tomorrow’s Transportation Will Feature a Rich Combination of Technologies
Various powertrains Various level of vehicle automation Various ITS technologies Various levels of communication
530
HEV
EV
PHEV
Autonomous Vehicle
PlatooningEco-Approach
Adaptive Cruise Control
Variable Speed Limit
Signal Broadcasting
Dynamic light sequencing
Traffic Management
Center
V2I
V2V
3
Electric Drive Vehicles Could Benefit from CAVs Technologies from Connectivity and Automation
4
• Route Based Control would allow lower fuel consumption by optimizing electric consumption throughout a trip.
• Opportunity for optimal powertrain design and speed control• Knowing location of charging stations, their status as well as
the vehicles’ battery SOC would provide helpful information to drivers (i.e., when should they charge, where is the closest charging point…)
• Drivers could reserve charging stations in advance (I.e., shopping, restaurants…) or know when one becomes available as soon as a car is charged (i.e., work)

But Connectivity & Automation Could Also Lower the Energy Savings Potential of xEVs
5
• A lot of the CAVs technologies focus on improving traffic flow, leading to lower accelerations & decelerations (i.e. EcoSignal).
• This will improve the efficiency of conventional vehicles much more than that of xEVs that benefit from regenerative braking
• Since xEVs benefit from deceleration events to recharge the battery, what will be the impact of having smoother a smaller number of deceleration events or even none of them?

Argonne Expertise
Mobility Energy
Current:VMT, microscopic traffic flow
Current:Average energy consumption per distance, simplistic models
National Impact
Assumptions
Current:Current fleet distribution, current vehicle technologies…
Current:Only vehicle impact evaluated
High Fidelity Vehicle Energy Consumption
Market Penetration, Fleet distribution,
VMT
National Impact (VISION)
Argonne has unique expertise and capabilities, of interest to DOT and DOE for differentiated research. Additional Lab expertise and resources could be leveraged:• HPC, optimization, vehicle
dynamometer testing, test procedure, sensors, cyber security, infrastructure resilience, grid, urban planning, buildings…
Polaris TransportationSimulation Model

Full Suite of Capabilities Required to Address CAVs Energy Impact
7
Single Vehicle Small Network Entire Urban Area
Evaluating new vehicle
technologies, developing new vehicle controls
Developing controls for
connected and automated
vehicles
Analyzing the impact of new infrastructure,
control and new forms of transportation
National Level
Evaluating energy impacts at the national level
Eco-driving Eco-Routing Route-Based Control
Connected IntersectionsV2XACC, CACC & Platooning
Connected IntersectionsPlatooning & Eco-lanes Low-emission zonesVMT changes

At the Vehicle Level, Autonomie is Used to Model Advanced Vehicles
Autonomie is a Plug&Play system simulation tool developed by Argonne & licensed by Siemens to more than 175 companies and universities worldwide.
Autonomie has been developed in partnership with General Motors under funding from the US Department of Energy
One of the main application of the tool is focused on assessing the energy impact of advanced technologies with a particular focus on xEVs.
The models and control algorithms have been validated using Argonne’s dynamometer test data.
More than 50 turn-key vehicles and 120 powertrains are currently available.
8
CATARC

Autonomie Vehicle Models Validated with Test Data
Test data from APRF (ANL)
ºC-7
21
35
50 100 150 200 250 300 350 400 4500
20
40
60
80
100
120
Engine speed (rad/s)
Eng
ine
torq
ue (N
m)
Control and Performance Analysis
Heat capacity estimationengine operation target
mode behaviors
Model Development (Autonomie)
Driver power demand Engine on/off demand
Enginepower demand
Engine on/off demandSOC
Engine torque demandEnginespeed demand
Motor 2 torque demand
Engine torque demand
Battery power demand
Motor 2torque demand
Motor torque demandDriver power demand
Mode decision(Engine on/off)
Motor 2:Engine speed
tracking
Motor:torque targetgeneration
Energy management
(SOC balancing)Engine target
generatingThermal conditions
controller
Teng_room
Heatercore
Tamb
Fan
Valve
Radi
ator
Engine
coolant loop heatercore loop
Teng
component
0 200 400 600 800 1000 1200-10
0
10
20
30
vehi
cle
spee
d (m
/s) UDDS
TestSimu
0 200 400 600 800 1000 1200
0
100
200
300
400
engi
ne s
peed
(rad
/s)
TestSimu
0 200 400 600 800 1000 1200-50
0
50
100
150
time (s)
engi
ne to
rque
(Nm
)
TestSimu
0 200 400 600 800 1000 12000
0.1
0.2
0.3
0.4
fuel
con
sum
ptio
n (k
g) UDDS
TestSimu
0 200 400 600 800 1000 120050
55
60
65
70
SO
C (%
)
TestSimu
0 200 400 600 800 1000 1200
40
60
80
time (s)
tem
pera
ture
(C)
Engine(Test)Engine(Simu)Battery(Test)Battery(Simu)
Model Validation
Test data
Simulation data
9

Vehicle Model Validated within Test to Test Uncertainty
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
7ºC 21ºC 35ºC
Fuel
con
sum
ptio
n (k
g)
HEVTest Simulation
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
7ºC 21ºC 35ºC
Fuel
con
sum
ptio
n (k
g)
PHEV (CS)Test Simulation
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
7ºC 21ºC 35ºC
Fuel
con
sum
ptio
n (k
g)
EREV (CS)Test Simulation
0
0.2
0.4
0.6
0.8
1
7ºC 21ºC 35ºC
Fuel
con
sum
ptio
n (k
g)
Conv.Test Simulation
-7°C 22°C 35°C -7°C 22°C 35°C
-7°C 22°C 35°C -7°C 22°C 35°C
10

RWDC CAV2
Vehicle Energy Impact Analysis for Various CAV Scenarios
11
Autonomie
3 Midsize vehicles
ConventionalHEVBEV
SSSpeed cycles
RWDC CAV1
RWDC
Database ofrecorded GPS traces
Selection with Energy Criteria
Speed transformation
0 20 40 60 80 100 120 140
1
2
3
4
5
6
7
8
9
10
Speed (km/h)
Fuel
Con
sum
ptio
n (l/
100k
m o
r l/1
00km
equ
ival
ent)
Conv. SSSpeedHEV SSSpeedBEV SSSpeedRWDC modif. 2
Results

Ideal CAVs Use Case -> Steady-State Cycles Fuel consumption results obtained with SSSpeed cycles simulations
– Theoretical representation of the highest connectivity degree• No stops and constant speed
12
0 20 40 60 80 100 120 140
1
2
3
4
5
6
7
8
9
10
Speed (km/h)
Fuel
Con
sum
ptio
n (l/
100k
m o
r l/1
00km
equ
ival
ent)
Conv.HEVBEV

Energetic Criteria Used to Select RWDCSource - Chicago Database
Database of recorded GPS traces speed include different drivers, different cars…
Positive Kinetic Energy (PKE) is a good driving style indicator:
𝑃𝑃𝑃𝑃𝑃𝑃 = ∑ 𝑣𝑣 𝑡𝑡+1 2−𝑣𝑣 𝑡𝑡 2
𝑥𝑥when 𝑎𝑎 𝑡𝑡 > 0
Where:– 𝑣𝑣 𝑡𝑡 : speed– 𝑣𝑣𝑚𝑚 : mean speed– 𝑎𝑎 𝑡𝑡 : acceleration
Selection of RWDC with:– Distance between 2 and 7 km– 2 cycles with the same 𝑣𝑣𝑚𝑚 per ten km/h– 𝑃𝑃𝑃𝑃𝑃𝑃 close to the average database 𝑃𝑃𝑃𝑃𝑃𝑃 𝑎𝑎𝑣𝑣𝑎𝑎
• 0.95 𝑃𝑃𝑃𝑃𝑃𝑃 𝑎𝑎𝑣𝑣𝑎𝑎(𝑣𝑣𝑚𝑚) < 𝑃𝑃𝑃𝑃𝑃𝑃 < 1.05 𝑃𝑃𝑃𝑃𝑃𝑃 𝑎𝑎𝑣𝑣𝑎𝑎(𝑣𝑣𝑚𝑚)
13
0 20 40 60 80 100 1200
0.1
0.2
0.3
0.4
0.5
0.6
Average speed (km/h)A
vera
ge P
KE
(Pos
itive
Kin
etic
Ene
rgy)
All RWDCSelected RWDCAveraged PKEPKE upper limitPKE lower limit
18 RWDC Selected
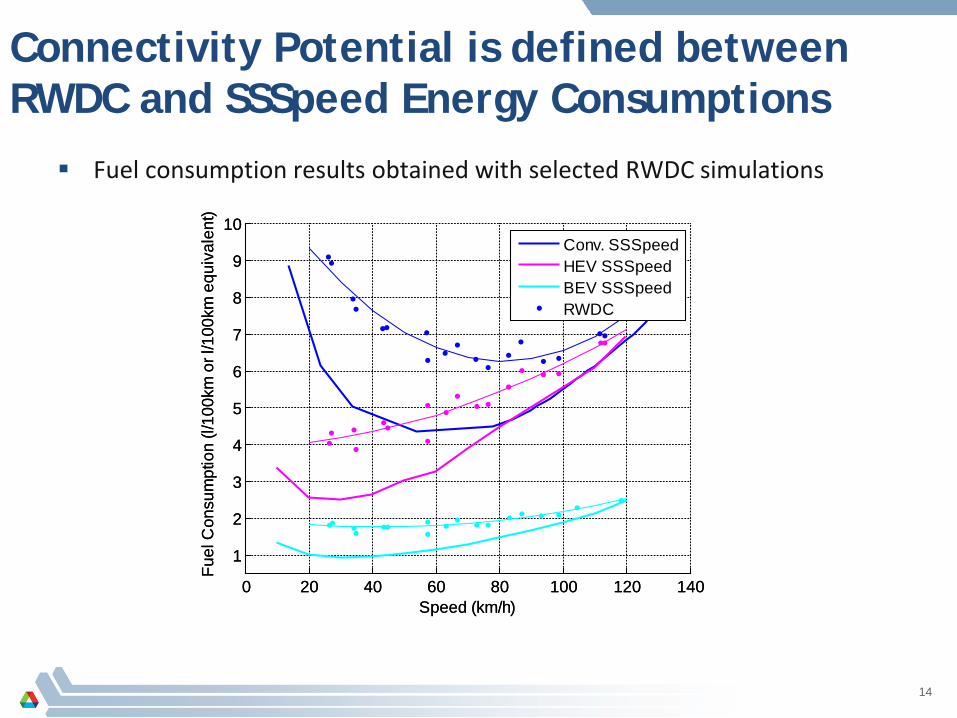
Connectivity Potential is defined between RWDC and SSSpeed Energy Consumptions
Fuel consumption results obtained with selected RWDC simulations
14
0 20 40 60 80 100 120 140
1
2
3
4
5
6
7
8
9
10
Speed (km/h)
Fuel
Con
sum
ptio
n (l/
100k
m o
r l/1
00km
equ
ival
ent)
Conv. SSSpeedHEV SSSpeedBEV SSSpeed
0 20 40 60 80 100 120 140
1
2
3
4
5
6
7
8
9
10
Speed (km/h)
Fuel
Con
sum
ptio
n (l/
100k
m o
r l/1
00km
equ
ival
ent)
Conv. SSSpeedHEV SSSpeedBEV SSSpeedRWDC
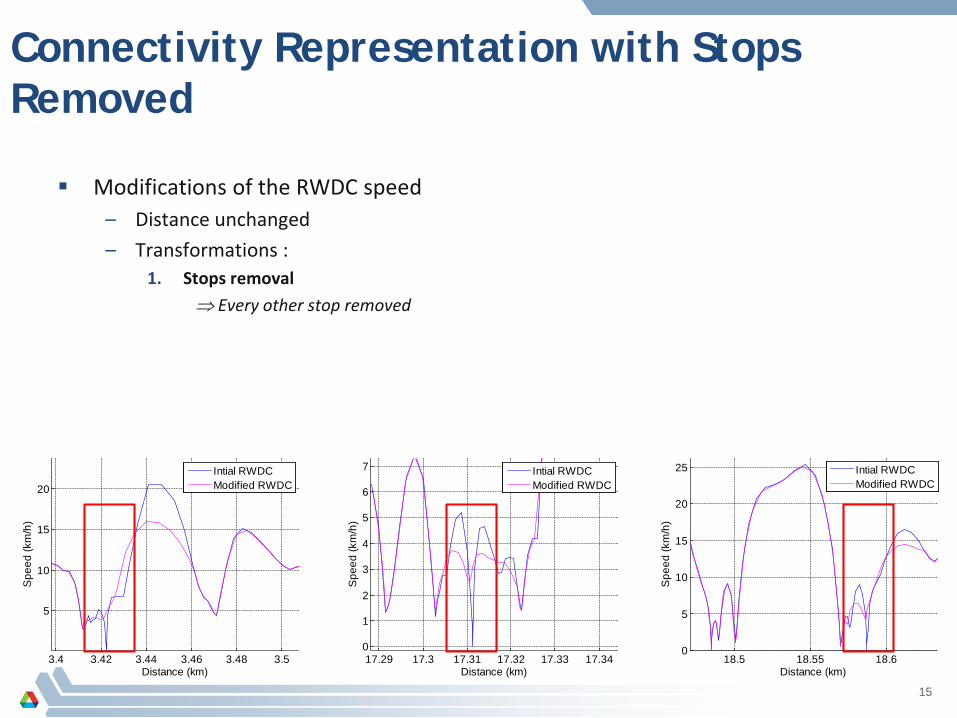
Connectivity Representation with Stops Removed
Modifications of the RWDC speed– Distance unchanged– Transformations :
1. Stops removal⇒ Every other stop removed
15
18.5 18.55 18.60
5
10
15
20
25
Distance (km)S
peed
(km
/h)
Intial RWDCModified RWDC
17.29 17.3 17.31 17.32 17.33 17.340
1
2
3
4
5
6
7
Distance (km)
Spe
ed (k
m/h
)
Intial RWDCModified RWDC
3.4 3.42 3.44 3.46 3.48 3.5
5
10
15
20
Distance (km)
Spe
ed (k
m/h
)
Intial RWDCModified RWDC

Connectivity Representation with Speed Smoothing
Modifications of the RWDC speed– Distance unchanged– Transformations :
1. Stops removal⇒ Every other stop removed
2. Traffic Smoothing⇒ 5s moving average
16
17.2 17.3 17.4 17.5 17.6 17.70
5
10
15
20
25
30
35
Distance (km)
Spe
ed (k
m/h
)
Intial RWDCModified RWDC
8 10 12 14 16 18
95
100
105
110
115
Distance (km)
Spe
ed (k
m/h
)
Intial RWDCModified RWDC
5 6 7 8 9116
118
120
122
124
Distance (km)S
peed
(km
/h)
Intial RWDCModified RWDC

Connectivity Representation with Acceleration Saturation
Modifications of the RWDC speed– Distance unchanged– Transformations:
1. Stops removal⇒ Every other stop removed
2. Traffic Smoothing⇒ 5s moving average
3. Acceleration saturation⇒ by -1.5 and 1.5 m/s2
17

Connectivity Representation with Speed Transformation
Modifications of the RWDC speed– Distance unchanged– Transformations:
1. Stops removal⇒ Every other stop removed
2. Traffic Smoothing⇒ 5s moving average
3. Acceleration saturation⇒ by -1.5 and 1.5 m/s2
4. Speed point by point transformation
18
0 10 20 30 40 500
10
20
30
40
50
Original Speed (km/h)
Tran
sfor
med
Spe
ed (k
m/h
)
28.2 28.4 28.6 28.80
5
10
15
20
25
30
Distance (km)
Spe
ed (k
m/h
)
Intial RWDCModified RWDC
29.5 30 30.5 31 31.50
10
20
30
40
50
60
70
80
Distance (km)
Spe
ed (k
m/h
)
Intial RWDCModified RWDC
16.6 16.7 16.8 16.9
5
10
15
20
25
30
35
40
Distance (km)S
peed
(km
/h)
Intial RWDCModified RWDC

Two Sets of CAV RWDC Defined Modifications of the RWDC speed
– Distance unchanged– Transformations:
1. Stops removal2. Traffic Smoothing3. Acceleration saturation4. Speed point by point transformation
2 CAVs RWDC scenarios:– CAVs RWDC 1 ⇒ Assumptions {1,2,3}
• No speed point by point transformation• 10% PKE decrease• Same averaged speed
– CAVs RWDC 2 ⇒ Assumptions {1,2,3,4} • 12% PKE decrease• Average speed increased at low speed
19

Connectivity Decreases Fuel Consumption Especially at Low Vehicle Speed
Fuel consumption results obtained with selected CAV RWDC simulations
20
0 20 40 60 80 100 120 140
1
2
3
4
5
6
7
8
9
10
Speed (km/h)
Fuel
Con
sum
ptio
n (l/
100k
m o
r l/1
00km
equ
ival
ent)
Conv. SSSpeedHEV SSSpeedBEV SSSpeed
0 20 40 60 80 100 120 140
1
2
3
4
5
6
7
8
9
10
Speed (km/h)
Fuel
Con
sum
ptio
n (l/
100k
m o
r l/1
00km
equ
ival
ent)
Conv. SSSpeedHEV SSSpeedBEV SSSpeedRWDC
0 20 40 60 80 100 120 140
1
2
3
4
5
6
7
8
9
10
Speed (km/h)
Fuel
Con
sum
ptio
n (l/
100k
m o
r l/1
00km
equ
ival
ent)
Conv. SSSpeedHEV SSSpeedBEV SSSpeedRWDC modif. 1
0 20 40 60 80 100 120 140
1
2
3
4
5
6
7
8
9
10
Speed (km/h)
Fuel
Con
sum
ptio
n (l/
100k
m o
r l/1
00km
equ
ival
ent)
Conv. SSSpeedHEV SSSpeedBEV SSSpeedRWDC modif. 2

35 to 50 % Potential Fuel Savings at Low Vehicle Speed
Potential fuel consumption decrease results obtained with selected CAV RWDC simulations
BEVs have biggest potential at low speed
21
20 40 60 80 100 1200
5
10
15
20
25
30
35
40
45
50
Speed (km/h)
Pot
entia
l fue
l Con
sum
ptio
n re
duct
ion
(%)
Fuel Cons. at RWDC speed as reference
Conv.HEV splitBEV
20 40 60 80 100 1200
5
10
15
20
25
30
35
40
45
50
Speed (km/h)
Pot
entia
l fue
l Con
sum
ptio
n re
duct
ion
(%)
Fuel Cons. at RWDC speed as reference
Conv.HEV splitBEV
20 40 60 80 100 1200
5
10
15
20
25
30
35
40
45
50
Speed (km/h)
Pot
entia
l fue
l Con
sum
ptio
n re
duct
ion
(%)
Fuel Cons. at RWDC speed as reference
Conv.HEV splitBEV
Steady-SpeedRWDC CAV1
RWDC CAV2

Virtual Proving Grounds to Quickly Evaluate the Impact of V2V, V2I… on the Energy
VEH1
VEH N
VEH2
Co-simulation of High Fidelity Vehicle Models
Environment Model (1)
Virtual Proving Ground
Sensors/V2X Models
Use cases examples:- Eco-Approach &
Departure at Signalized Intersections
- Eco-Traffic Signal Timing
- Eco-Traffic Signal Priority
- Connected Eco-Driving- Route based control- Impact on traffic flow…
Closed loop control critical for energy and speed optimization22
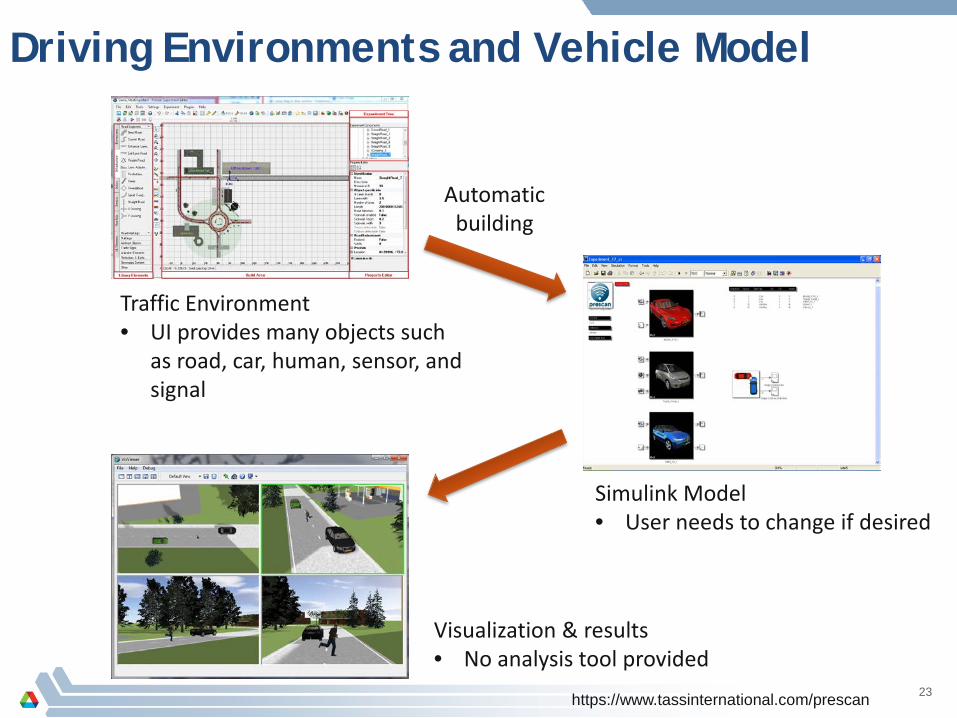
Driving Environments and Vehicle Model
Simulink Model• User needs to change if desired
Traffic Environment• UI provides many objects such
as road, car, human, sensor, and signal
Visualization & results• No analysis tool provided
Automatic building
23https://www.tassinternational.com/prescan

Autonomie Vehicle Models in PreScan
Simulink Model• User needs to change if
desiredElectric Vehicle
HEV
Conventional
High fidelity vehicle models from Autonomie can replace PreScan vehicle model placeholders within Simulink
24
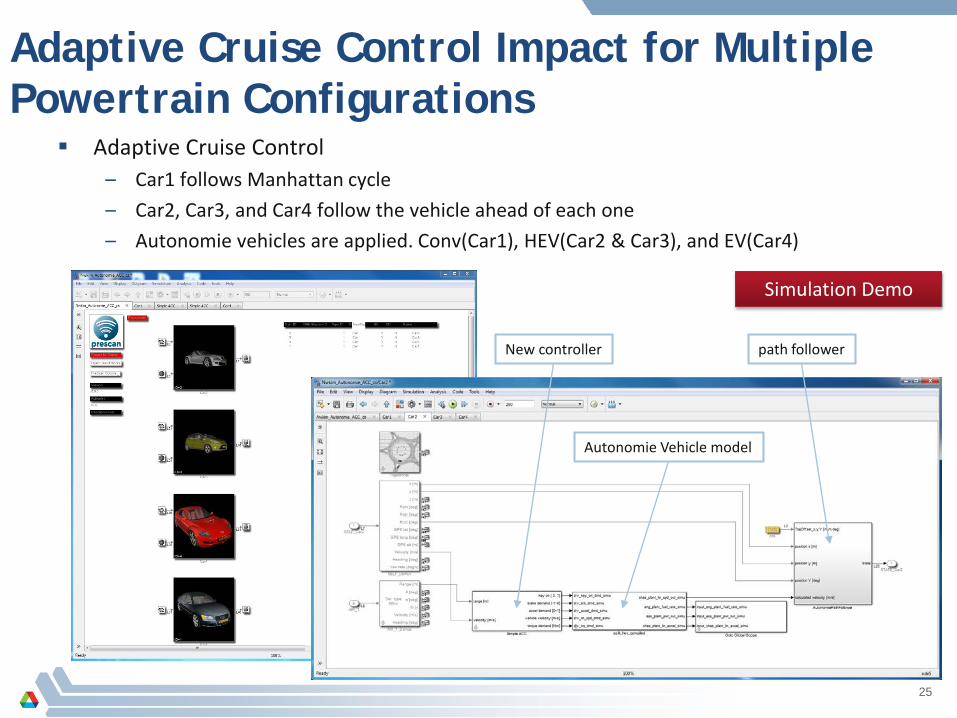
Adaptive Cruise Control Impact for Multiple Powertrain Configurations
Adaptive Cruise Control– Car1 follows Manhattan cycle– Car2, Car3, and Car4 follow the vehicle ahead of each one– Autonomie vehicles are applied. Conv(Car1), HEV(Car2 & Car3), and EV(Car4)
path followerNew controller
Autonomie Vehicle model
Simulation Demo
25

[main_info_bus]
[whl]
whl
[main_info_bus]
[tc]
tc
[main_info_bus]
[str]
str
[str_3]
gotostr_3
[gen_3]
gotogen_3
[cpl_3]
gotocpl_3
-T-
gotoaccelec_3
[main_info_bus]
[gen]
gen
[main_info_bus]
[gb]
gb
[str_3][gen_3]
[cpl_3]-T-
[main_info_bus]
[fd]
fd
[main_info_bus]
[ess]
ess
[main_info_bus]
[eng]
eng
[main_info_bus]
[cpl]
cpl
[main_info_bus]
[chas]
chas
[main_info_bus]
[accmech]
accmech
[main_info_bus]
[accelec]
accelec
26
Transportation Simulation Powertrain Simulation
Fleet Definition
Energy consumption of the transportation network
At the Fleet Level, Large Transportation System Models are Required to Evaluate CAVs ImpactUse cases examples:- Eco-Lanes (dedicated freeway, variable speed limits, ECACC…)- Wireless charging (bus lanes)- Low Emissions Zones- Platooning- Smoother braking- Mixed vehicle fleet (i.e. HEVs, BEVs + few CAVs)- Increased VMT due to travel behavior changes- Charging station location…

Integrated Transportation Model ( )
NETWORK MODEL Physical laws that govern dynamics of
traffic flow Newell’s model Managed Lanes Controlled intersections (traffic signals) Traveler information systems Traffic management Multimodal travel (Integrated
corridor management)27
POLARIS is an agent-based transportation system model
Decision making is decentralized. Each traveler has its own goals and behaviors. All aspects of activity and travel are represented in a single model
Travelers are autonomous and can adopt to current conditions (congestion, mode availability, information available)
Not restricted to a limited number of market segments (user groups)
The agent based framework is flexible and can accommodate other types of agents (buildings, authorities, smart infrastructure)

Integrated Transportation System Model ( )
28

Individual Activity Travel Patterns Allow Accurate Drive Cycle Evaluation
1:55 PMReturn to Work
6:30PMShop
2:45 PMOff Train
9:15 AMDrop off
9:15 AMDay Care
3:50 PMPick up
7:15 PMReturn
9:00 AMLeave Home
8:00 AMLeave Home
8:15 AMOn Train
9:00AMLeave Home
4:10PMReturn 4:10 PM
Return
Drive Trip
Passenger Trip
Train Trip
Activity Locations
In Chicago over 46% of time away from home is not at a work or school location
1:15 PMLunch
10:00 AMArrive at Work
3:00 PMRecreation
29

Evaluating the Energy Impact of an Automation Scenario
30
Powertrain Technologies • Each vehicle class has a conventional ICE version
(CV) and a hybrid (HEV) version • Each vehicle template has a unique combination of
components and average mass
3 Scenarios: • UM: Unmanaged • ML: Managed lane for heavy-duty trucks • ML+ACC: Managed lane for trucks, and all trucks have
adaptive cruise control (ACC)
18 km Stretch of Highway in Chicago 25 on- and off- ramps

Evaluating the Energy Impact of an Automation Scenario
• With managed lanes, the savings are lower, and non-existent when ACC is used. This is because braking, and its recuperation, is virtually eliminated.
• Overall fuel savings for trucks:–- managed lanes (ML): 25%–- managed lanes + ACC: 40%
31
Fuel Consumption Distribution (all trucks, FS1)
Average Truck Fuel Consumption
• Class 8 hybridization (“mild” with ISG) saves approx. 15% in the unmanaged case; for class 6 (“full HEV”), savings are approx. 20%.
• With managed lanes, the savings are lower, and non-existent when ACC is used (No regen braking)

Conclusion
• A lot of good work has been performed, but since the focus has been forconventional vehicles at the individual level, additional in-depth analysisneeds to be performed to assess the impact on energy.
• At the vehicle level using CAV-like RWDC, we showed that,– Connectivity decreases fuel consumption especially at low speed– 35 to 50 % connectivity potential fuel savings at low speed
• BEVs have biggest potential at low speed
– Connectivity doesn’t modify the hybridization potential• System level analysis has to be performed including uncertainty using new
set of tools.• The potential increase in travel demand could reverse the recent
significant gains.• Advanced vehicle technologies such as electrified vehicles could minimize
the impact of the demand effect through fuel energy diversification.• CAVs could lead to an increase in advanced vehicles market penetration
32