impact of string stiffness on virtual bowed strings acoustics of
TRANSCRIPT

Impact of String Stiffness on Virtual Bowed Strings
Stefania Serafin, Julius O. Smith IIICCRMA (Music 420),
May, 2002Center for Computer Research in Music and Acoustics (CCRMA)
Department of Music, Stanford UniversityStanford, California 94305
February 5, 2019
1
Overview
• Acoustics of bowed string instruments.
• Modeling a violin string
• Modeling the role of the bow
• Coupling the bow and the string
• Analysis of the playability of the model
2

Acoustics of bowed string instruments
• The sound produced in a bowed string instrument isobtained by drawing a bow across one of the fourstreched strings.
• To produce sound, energy from the vibrating string istransferred to the body of the instrument.
NUTBRIDGE
Body
Bow to
delay
bridge
Bow−
string
interactionBow to nut delay
Input parameters
A bowed string instrument and the correspondingsimplified block diagram of its model.
3
Elements of a Basic Bowed String Model
• Bow-string interaction
• Transverse waves on the string
• Losses at the bridge, finger, and along the string
von vob
vibµ(.)vin
vh=vin+vib
f= µ(v-vb)
2Z(v-vh)f=
von=vib+f/(2Z)
vob=vin+f/(2Z)
(nut side)
StringBOW
String
(bridge side)
vb pb vb
Control parameters
Bridge−1
Structure of a basic model of a bowed string.
This model supposes that the bow is applied to a singlepoint pb in the string. When vb = v, bow and string sticktogether, otherwise they are sliding.
4

v = von + vin= vob + vib
The contribution of the reflected waves vin and vib aresummed at the contact point:
vh = vin + vib
Bow string interaction is represented by the followingrelations:
f = 2 Z (v − vh)f = γ (v − vb)
Once this coupling has been solved, the new outgoingwaves von and vob are calculated by the followingequations:
von = vib +f2Z
vob = vin +f2Z
5
Bow-String Interaction
v-vb
f=2Z(v-vh)
f
Slipping forward
Slipping backward
v-vbf=Z(v-vh)
f
6

If three intersections occur, the result is determined bythe following hysteresis rule:
• The system follows its current state (stick or slip) aslong as possible.
• The system will never fall in the middle of the threeintersections.
7
Modeling String Losses
In an anachoic room, we have recorded strings plucked infive different positions, as shown in the figure below:
1 2 3 54
BRIDGENUT
FINGERBOARD
Five different positions in which the string has beenplucked.
Plucks have been made using a hard-plastic pick, in orderto excite also high frequencies.
8
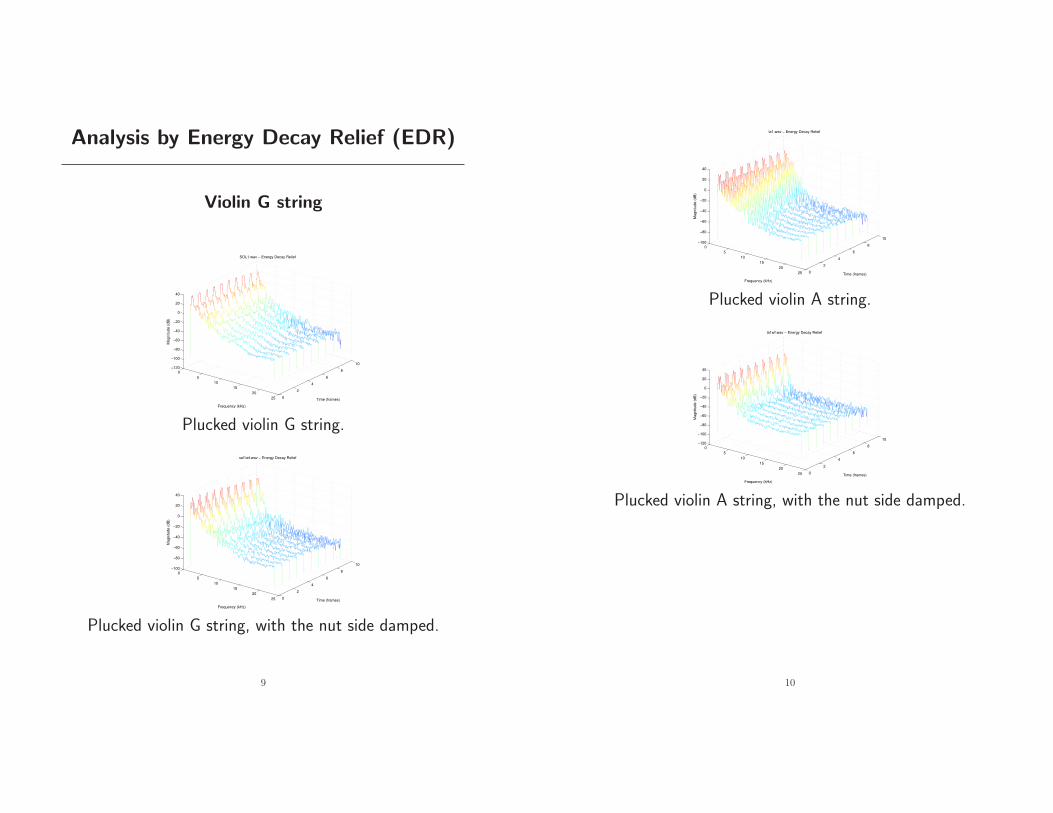
Analysis by Energy Decay Relief (EDR)
Violin G string
0
5
10
15
20
25 0
2
4
6
8
10−120
−100
−80
−60
−40
−20
0
20
40
Time (frames)
SOL1.wav − Energy Decay Relief
Frequency (kHz)
Magnitude (
dB
)
Plucked violin G string.
0
5
10
15
20
25 0
2
4
6
8
10−100
−80
−60
−40
−20
0
20
40
Time (frames)
sol1wf.wav − Energy Decay Relief
Frequency (kHz)
Magnitude (
dB
)
Plucked violin G string, with the nut side damped.
9
0
5
10
15
20
25 0
2
4
6
8
10−100
−80
−60
−40
−20
0
20
40
Time (frames)
la1.wav − Energy Decay Relief
Frequency (kHz)
Magnitude (
dB
)
Plucked violin A string.
0
5
10
15
20
25 0
2
4
6
8
10−120
−100
−80
−60
−40
−20
0
20
40
Time (frames)
la1wf.wav − Energy Decay Relief
Frequency (kHz)
Magnitude (
dB
)
Plucked violin A string, with the nut side damped.
10

Calculation of the decay rate of thepartials
• We calculate the slope of every partial in a db scale,to get the decay rate.
• The decay time is used to obtain the low-pass filtersthat estimate losses.
11
Accounting for Torsional Waves
Torsional waves can be modeled as an additional coupleof waveguides whose speed is about 5.2 times thetransverse wave speed.
vh = vin + vib + vint + vibt
von = vib +f
2Z
vob = vin +f
2Z
vont = vibt +f
2Zt
vobt = vint +f
2Zt
String String Bridge
BOW
vbpbvb
Control parameters
String Bridge
−1
−1String
(nut side,
trasversal waves)
(nut side,
torsional waves) trasversal waves)
(bridge side,
(bridge side,
torsional waves)
Structure of the basic model with filter in the nut sideand torsional waves.
12

where f = applied force
Z = string transverse wave impedance
Zt = string torsional wave impedance,
Torsional waves facilitate the establishment of Helmholtzmotion because they are more damped than thetransversal waves.Their contribution at the bow point can be modeled intwo ways:
1. Changing the slope of the straight line:
Zs =1
12Z + 1
2Zt
2. Changing the inclination of the friction curve
v-vb
f
13
Modeling the stiffness of the string
The stretching of the frequencies of the partials can becalculated as:
fn = nf0√1 +Bn2
where B = π3Ed4
64l2T=inharmonicity factor,
f0 =fundamental frequency of the string.
E=Young modulus of elasticity, d=diameter.
0 5 10 15 20 25 30 35 40 45 500
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
Shift of partials for a cello D string, f0=147 Hz,B=3e-4.x-axis: partial number, y-axis: frequency (Hz)
14

Physical constants of a Dominant violin string, fromPickering
String E (N/m) d(m) l (m) T B
E 15.7 0.000307 0.565 72.56 5.1627e-15A 7.470 0.000676 0.59 56.25 6.5418e-14D 6.4 0.000795 0.567 43.72 1.5707e-12G 6.035 0.000803 0.567 44.57 1.4963e-12
Physical constants of a gut violin string, from Schelleng.
String B
E 1.5598e-05A 4.8527e-05D 2.4841e-04G 1.3e-3
15
Designing allpass filters for dispersionsimulation
We choose a numerical filter made of a delay line delayline qτ−τ0, and a n-order stable all-pass filter:
H(q) = qnP (q−1)/P (q)
where
P (q) = p0 + . . . + pn−1qn−1 + qn
and τ and n are appropiately chosen.
We minimize the infinity-norm of a particular frequencyweighting of the error between the internal loop phaseand its approximation by the filter cascade:
δD = minp1,...,pm
‖WD(Ω)[ϕd(Ω)− (ϕD(Ω) + τΩ)]‖∞
where ϕD(Ω) =phase of H(ejΩ),WD(Ω) = frequency weigthing (WD(Ω) is zero outsidethe frequency range), i.e. [Ωc,ΩN ].
16

Results
The figure below shows the results given by thealgorithm, for a cello string (147 Hz) with B = 3e− 4.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−8
−6
−4
−2
0
2
4
6
8
10Erreur frequentielle finale sur les partiels
Frequency error (in cent) after the allpass filter approximation, for a cello D string..
17
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000−10
−8
−6
−4
−2
0
2
4
6
8
10Erreur frequentielle finale sur les partiels
Frequency error (in cent) after the allpass filter approximation, for a violin A string, with
B = 4.8527e− 5.
String String Bridge
BOW
vbpbvb
Control parameters
String BridgeString
(nut side,
trasversal waves)
(nut side,
torsional waves) trasversal waves)
(bridge side,
(bridge side,
torsional waves)
Dispersion−1
−1
18

The friction models used in these simulations are:
• an hyperbola
µ = µd +(µs − µd)v0
v0 + v − vb
µd = 0.3 , µs = 0.8.
a sum of decaying exponentials:
µ = 0.4 ev−vb0.01 + 0.45 e
v−vb0.1 + 0.35
19
• a plastic model recently proposed by JimWoodhouse, who discovered that friction does notdepend only on the relative velocity between the bowand the string.
0.17 0.172 0.174 0.176 0.178-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
Time0.12 0.13 0.14 0.15 0.16 0.17
2
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4
Time
0.12 0.13 0.14 0.15 0.16 0.170.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
Time-0.4 -0.3 -0.2 -0.1 0 0.11
1.02
1.04
1.06
1.08
1.1
1.12
1.14
1.16
Velocity
20

µ =Aky(T )
Nsgn(v)
where
A = contact area between the bow and the string
N = normal load
ky(T ) = shear yield stress as a function of the bow-string contact
• In the plastic model the key state variable governingthe friction force is the temperature of the contactregion.
• The notion of coefficient of friction is kept, butinstead of depending on sliding speed it depends oncontact temperature.
• The contact temperature, in turn, depends on thesliding velocity (recent history).
21
Accounting for the width of the bow
von vob
vibvin
vh=vin+vib
f= µ(v-vb)
2Z(v-vh)f=
vob=vin+f/(2Z)von=vib+f/(2Z)
Model with a single bow hair
To model two bow hairs, it is necessary to double thebow-string interaction and the incoming wave velocities.
von vob
vibvin
vhl=vin*h+vib
fl=µ(vl-vb)
2Z(vl-vhl)fl=
vob=vin+fl/(2Z)
fr=µ(vr-vb)
2Z(vr-vhr)fr=
von=vib+fr/(2Z)
vhr=vin+vib*h
A two point bowed string model
22

4000 4500 5000 5500 6000 6500 7000 7500 8000
−0.2
0
0.2A
mp
litu
de
4000 4500 5000 5500 6000 6500 7000 7500 8000
−0.2
0
0.2
4000 4500 5000 5500 6000 6500 7000 7500 8000
−0.2
0
0.2
4000 4500 5000 5500 6000 6500 7000 7500 8000−0.4
−0.2
0
0.2
Time (samples)
Simulation results from top to bottom: basic model,basic model with torsional waves, basic model with
torsional waves and string stiffness, model with torsionalwaves, string stiffness and bow width.
23
Calculation of the playability
What does playability mean?
“Playability” can be defined as the region of amultidimensional space given by the parameters of themodel where a good tone is obtained, where by goodtone, we usually mean the Helmholtz motion.
3
51
4
26
7
8
• The string sticks to the bow for most of the time,slipping backwards just once per vibration period.
24

• String motion:
Time
0
Str
ing v
eloci
ty
Time
Bri
dg
e fo
rce
Motion of a bowed string during an ideal Helmholtzmotion. String velocity at the bowed point and
trasverse force exerted by the string on the bridge.
25
Other kinds of motions
(pictures from the computer simulated model)
• Multiple slipsThe bow force is not high enough to allow the bow tostick throughout the nominal sticking period of theHelmholtz motion.
0 500 1000 1500 2000 2500 3000 3500-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
• Anomalous low frequencyA periodic note with a lower pitch can be producedwith a control of the bow force that makes thetransversal waves to miss a slip opportunity few timesin the stick-slip motion.
0 500 1000 1500 2000 2500 3000 3500-5
-4
-3
-2
-1
0
1
2
3
4
26

• Non-periodic motionsIrregular motion obtained when the bow force is toohigh.
0 500 1000 1500 2000 2500 3000 3500-1.5
-1
-0.5
0
0.5
1
1.5
27
Toward a Measure of Playability
The Schelleng diagram (1973)
Minimum bow force
Maximum bow force
Sul ponticello
Brilliant
Sul tasto
0.01 0.02 0.04 0.06 0.1
0.001
0.1
1
Relative position of bow, ß
Re
lative
fo
rce
RAUCOUS
NORMAL
0.2
0.01
HIGHER MODES
Inside the two straight line is the region where theHelmholtz motion is obtained.
28

Formulas for the Schelleng diagram
fmax =2Zvb
(µs − µd)β
fmin =Z2
2r1· vb
(µs − µd)β2
where µs=coefficient of static frictionµd=coefficient of dynamic frictionvb=bow velocityβ=bow positionZ=characteristic impedance of the string,Z =
√Tρ
r1=term that represents losses of the string
29
Simulation Parameters
• In the first simulations we examine a cello D string,with bending stiffness B = 0.0004 N m2.
• The string, starting from rest, is excited by a constantbow velocity vb = 0.05m/s.
• The Schelleng diagram is computed by varying thebow force fb from 0.005 to 5N , and the normalizeddistance β of the bow from the bridge is variedbetween 0.02 and 0.4 (where 0.5 would be the middleof the bow).
• A classifier routine examines the shape of theestablished waveforms.
In the second simulations we fix the bow position to 0.08,where 0 represents the bridge while 1 represents the nut,and we vary bow velocity and bow force.
30
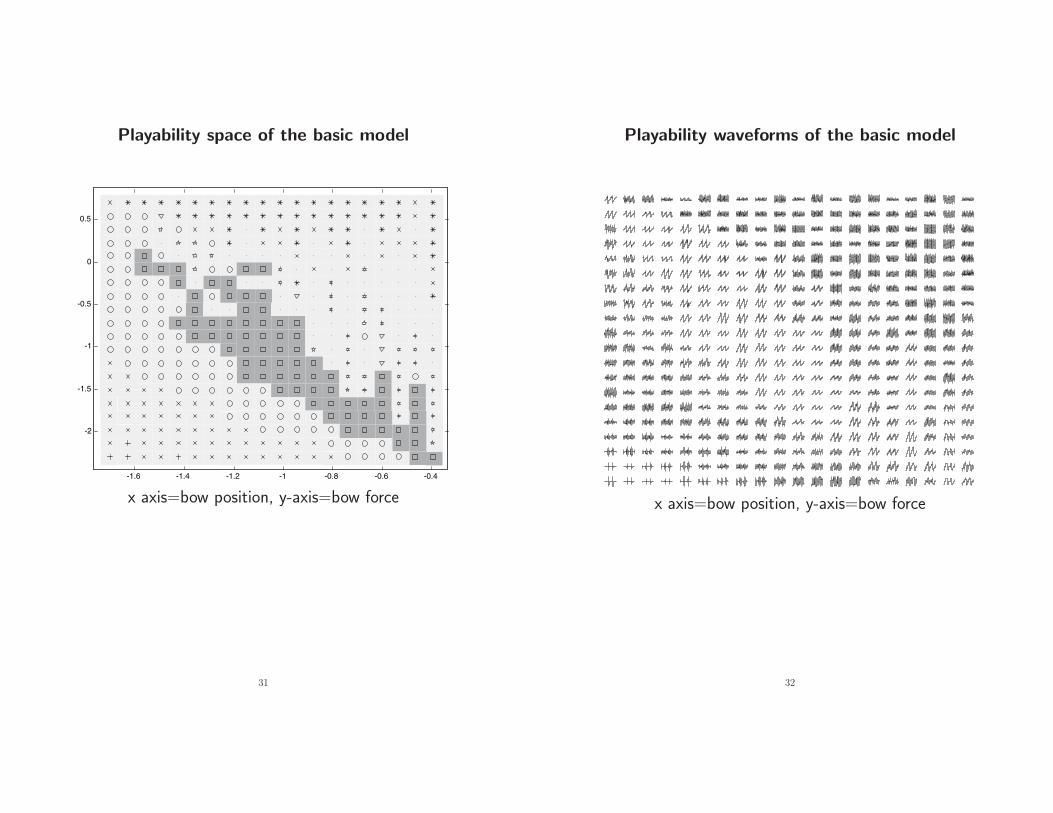
Playability space of the basic model
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4
-2
-1.5
-1
-0.5
0
0.5
x axis=bow position, y-axis=bow force
31
Playability waveforms of the basic model
x axis=bow position, y-axis=bow force
32

Velocity versus force playability space of thebasic model
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4
-2
-1.5
-1
-0.5
0
0.5
x-axis=bow velocity, y-axis=bow force
33
3D playability space of the basic model
−2
−1.5
−1
−0.5
0
−2
−1.5
−1
−0.5
0
0.5
1
0
0.2
0.4
0.6
0.8
1
log10(beta)log10(force)
(ve
locity)
34

-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4
-2
-1.5
-1
-0.5
0
0.5
x-axis: bow position, y-axis:bow force
35
Velocity versus force playability space of thedamped model
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4
-2
-1.5
-1
-0.5
0
0.5
x-axis= bow velocity, y-axis= bow force
36
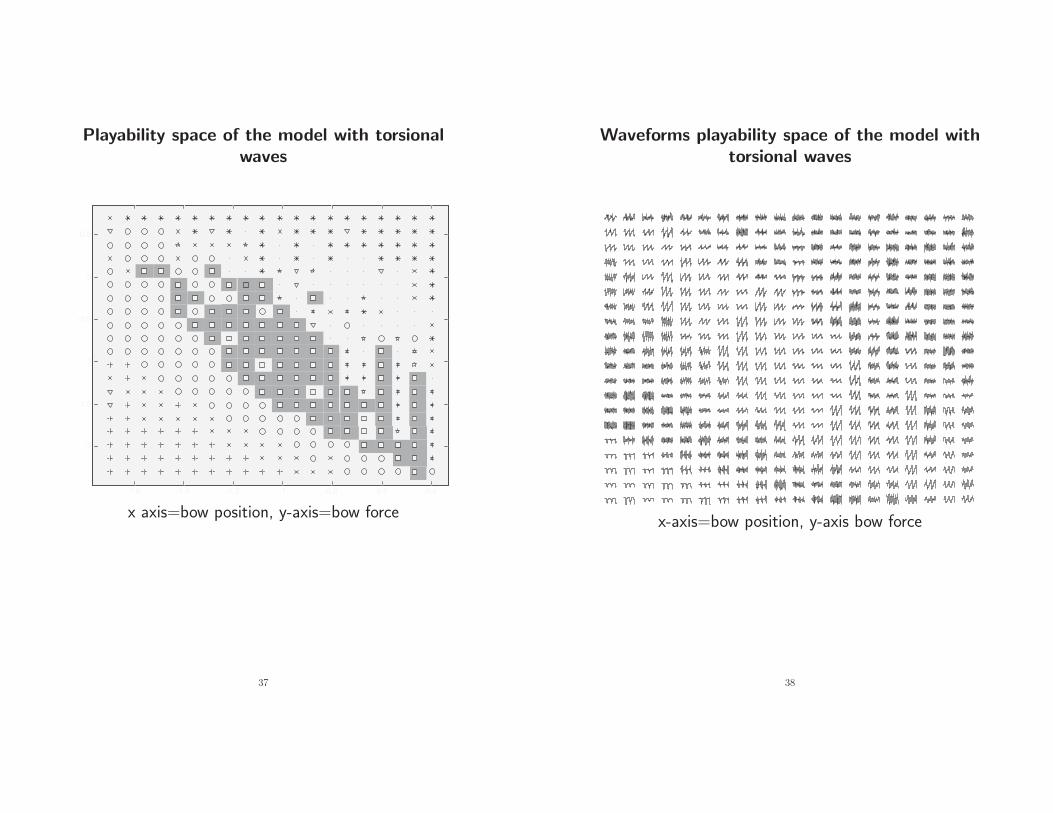
Playability space of the model with torsionalwaves
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4
-2
-1.5
-1
-0.5
0
0.5
x axis=bow position, y-axis=bow force
37
Waveforms playability space of the model withtorsional waves
x-axis=bow position, y-axis bow force
38

Velocity versus force playability space of themodel with torsional waves
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4
-2
-1.5
-1
-0.5
0
0.5
x-axis=bow velocity, y-axis=bow force
39
3D playability of the model with torsional waves
−2
−1.5
−1
−0.5
0
−1
−0.5
0
0.5
10
0.2
0.4
0.6
0.8
1
log10(beta)log10(force)
log
10
(ve
locity)
40

Velocity versus force playability of the modelwith stiffness
-1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4
-2
-1.5
-1
-0.5
0
0.5
Playability of the model with stiffness, x-axis=bowvelocity, y-axis=bow force
41
Playability of the model with stiffness
x-axis= bow position, y-axis= bow force
42

3D playability of the model with stiffness
−1.8−1.6
−1.4−1.2
−1−0.8
−0.6
−2
−1.5
−1
−0.5
0
0.5
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
log10(beta)log10(force)
log10(v
elo
city)
43
Conclusions
• Refined models of a bowed string are nowadayspossible.
• In this document we did not present a model for thebody of the instrument.
• The bow hair compliance can be further improved bycreating a finite-difference bow-width model.
44