impedance function
DESCRIPTION
foundation vibrationTRANSCRIPT
Applied Mathematics and Computation 173 (2006) 636–667
www.elsevier.com/locate/amc
The evaluation of impedance functions in theanalysis of foundations vibrations using
boundary element method
E. Celebi a,*, S. Fırat b, _I. Cankaya c
a Faculty of Engineering, Department of Civil Engineering, Sakarya University,
54187 Esentepe-Sakarya, Turkeyb Faculty of Technical Education, Department of Construction, Sakarya University,
54187 Esentepe-Sakarya, Turkeyc Faculty of Technical Education, Department of Electronics and Computer, Sakarya University
54187, Esentepe-Sakarya, Turkey
Abstract
The basic step in the substructure approach based on discretization of the soil med-
ium for the soil–structure interaction problems is to determine the impedance functions
which are defined as the complex dynamic-stiffness coefficients of the soil-footing system
are used in the analysis of foundations vibrations. In this study, the discrete values of
impedance functions over wide ranges of frequency-factors are presented for both sur-
face-supported and embedded foundations. The numerical results are obtained by using
the substructure approach in the frequency domain which is formulated on basis of the
Boundary Element Method derived from the fundamental solution for a homogeneous,
isotropic and linear-elastic continuum. To further demonstrate in practical applications
and to show the solutions of this type of problems to civil engineers, a comprehensive
parametric analysis and systematic calculations are performed with various controlling
parameters to evaluate the dynamic response of the vibrating soil–foundation system. In
0096-3003/$ - see front matter � 2005 Elsevier Inc. All rights reserved.
doi:10.1016/j.amc.2005.04.006
* Corresponding author.
E-mail address: [email protected] (E. Celebi).

E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 637
addition, the solutions for normalized stiffness and damping coefficients of foundations
in almost all cases of vibration modes are in very good agreement with the published
results based on the analytical methods. The obtained numerical results should enable
practicing engineers to take into account the linear soil–structure interaction problems
over wide ranges of frequency factors.
� 2005 Elsevier Inc. All rights reserved.
Keywords: Soil–structure interaction; Boundary element method; Three-dimensional frequency
domain analysis; Substructuring approach; Embedded foundations; Dynamic excitations
1. Introduction
The propagation of the waves through the soil medium generated by earth-
quake ground motion or human made vibrations such as machine foundations,
traffic loads or construction blasting may produce excessive ground vibrations
which have recently received special attention in the world wide scope, because
people are more aware of their life quality, comfort and safety. The increasing
both passenger transport and running speed, and the weight of the wave
source, such as high speed trains with heavy-axle double-deck wagons, heavy-
loaded freight traffics or giant lorries would likely produce reasonably strongground and structural vibrations. The elastic response of engineering construc-
tions under dynamic loads as earthdams or nuclear power installations which
present a risk for population and environment is influenced by deformability of
the foundation medium, especially in case of very soft ground conditions.
Therefore the fixed base structures assumption represents a large approxima-
tion to the real conditions. It is widely recognized that the dynamic response
of a structure supported on soft soil may be different from the response of sim-
ilarly excited, identical supported on firm ground. The effects of soil–foundationinteraction on the dynamic response of building systems have been main theme
of numerous investigations and recognized as an important task in the dynamic
analysis in recent years. Interest in this subject originates from the field of struc-
tural and geotechnical engineering in association to design of the engineering
structures.
During the last decade, with development by the appearance of high perfor-
mance computers, various proposed approaches with different accuracy which
have to be classified as either numerical methods, analytical methods or (semi-)empirical methods and their coupling procedures for modeling of unbounded
media have been carried out to investigate the dynamic response of vibrating
foundations founded on deformable soil region. Wolf [1] proposed recently a
new extensively detailed approach by using a cone model to develop formula-
tions of impedance functions of massless rigid foundations.
Nomenclature
a0 dimensionless circular frequency
B half-width in the y-direction (rectangular foundation)cs shear wave velocity
cp dilatational wave velocity
ca dimensionless damping coefficient corresponding to the vibration
mode aD embedment depth of foundationeE complex Young�s modulus
FN discrete Fourier Transform
f dynamic compliance matrixfi body force components defined per unit volume
G shear modulus of soil
K complex frequency-dependent dynamic stiffness matrix
Ks1j static stiffness for the half-space for the vibration mode aKa impedance function for the vibration mode aka dimensionless spring coefficient corresponding to the vibration
mode aL half-length in the x-direction (rectangular foundation)a = x,y,z translational vibration mode in the x-, y-, z-directions
a = mx,my,mz rotational vibration mode about x-, y-, z-axis
P vector of interaction forces at basement nodes
r radius of foundation
uox, uoy, uoz displacement components in the directions of x, y and z
u displacement vector of the geometric center of the base of the
footing
a index of modeb damping ratio
ui components of constant interpolation function
dij Kronecker delta
q mass density
m Poisson�s ratio of soil medium
ekk kinematical compatibility
l, k Lame constants
x circular frequency of excitationrij component of stress tensor
X elastic domain
cox, coy, coz rotations about the x-, y- and z axes~f k complex force amplitudes~t matrix of complex frequency dependent tractions
638 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
�~tiðx;xÞ frequency dependent traction boundary conditions~t�ikðx; n;xÞ full-space fundamental solutions for the traction components~u matrix of complex frequency dependent displacements~uk complex displacement amplitudes�~uiðx;xÞ frequency dependent displacement boundary conditions~u�ikðx; n;xÞ full-space fundamental solutions for displacement components
C1, C2 boundaries of elastic domain
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 639
Numerical models using the finite and boundary element method (BEM) are
under development for the analysis of wave propagation problems in solids
with emphasis on dynamic soil–structure interaction (SSI) due to dynamic exci-
tations [2–4]. However, the relatively complicated formulation and intensive
computation to obtain the exact solution for this problem restrict its common
application to traditional engineering practice up to now.
BEM in elastodynamics is appropriate and effective numerical tool to study
such interaction effects. In this approach the energy radiation condition to-wards infinity is correctly taken into account by the integral equations and
the space discretization is reduced to only the boundary of the adjacent med-
ia�s. The most important contributions were published by Dominguez and
Roesset [5] based on the frequency domain BEM to compute the impedance
functions for surface supported rectangular foundations. Also, Veletsos and
Wei [6] and Luco and Westman [7] solved exactly the mixed boundary value
problem of a rigid disk resting on elastic half-space for vertical, sliding, rocking
and torsional harmonic motions. Apsel and Luco [8] obtained dynamic Green�sfunctions for a layered half-space.
Gazetas and Tassouslas [9,10] investigated the dynamic response of arbi-
trarily shaped rigid foundations embedded in a uniform half-space for low fre-
quency ranges. Integral solution techniques assuming welded contact condition
for circular foundations embedded in an incompressible soil have also been
presented by Apsel and Luco [8] and Mita and Luco [11]. Most of numerical
results for surface and embedded rigid basemat published to date are presented
for low to moderate frequencies (0 6 ao 6 4) and are restricted for certain val-ues of Poisson�s ratio (0.25 6 m 6 0.45) and for certain types of foundation
geometry due to the cost of computation, practical assumptions and limitations
of rigorous analysis techniques.
By using special fundamental solutions for m = 0.5, Bu [12], Bu and Lin [13]
proposed rigorous boundary element solutions for impedance functions of
square foundations (2-D model) embedded in a perfectly incompressible
half-space at high frequency ranges. They described new theoretical methods
of calculation and improved available numerical procedures. In the most of
640 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
these contributions the authors illustrated their methods with the help of one
example and/or compared with results previously published references. At this
point, numerical results or empirical relations, which are derived from the sys-
tematic parametric calculations, indicate decreasing tendency. Consequently,
the engineer has only the results for few cases in order to assess dynamic SSI
for practical purposes.In this study, the numerical results are obtained by using the substructure
approach in the frequency domain which is formulated on basis of the BEM
based on the fundamental solution for a homogeneous, isotropic, linear-elastic
continuum. To further demonstrate in practical applications and to show the
solutions of this type of problems to civil engineers, a comprehensive paramet-
ric analysis and systematic calculations are performed with various controlling
parameters to evaluate the dynamic response of the vibrating soil–foundation
system.
2. General definition of the impedance functions for rigid foundations
The properties of the dynamic reciprocal-interaction between foundation of
superstructure and the supporting soil can be investigated using either a steady-
state analysis in the frequency domain or a direct time domain substructure ap-
proach. In the frequency domain analysis research concern is focused mainlyon the revelation of soil impedances and the interpretation of the frequency-
dependent nature of SSI problems. The evaluation of the impedance-compli-
ance functions which are defined as the complex dynamic stiffness-flexibility
coefficients at the interface points of the soil–foundation system plays a signif-
icant role in the analysis of SSI problems. By using the substructure method the
system has been divided into two substructures. The governing equations,
describing the dynamic response of the finite superstructure or its foundation
and the unbounded soil, can be analyzed independently with respect to the de-gree of freedom at the common interface nodes. By supplying equilibrium and
compatibility conditions at all interaction points the complete structure is reas-
sembled and a solution for the whole system can be realized. The effect of the
unbounded soil on the behavior of the structure is represented by a boundary
condition joined at those degrees of freedom associated with the nodes at the
interface between the two substructures. In the present paper this boundary
condition is of the form of a displacement–force relationship computed by
using fundamental solution for a homogeneous half-space.The substructure technique allows a coupling of the basemat of superstruc-
ture and the underlying soil at the common interaction nodes. The impedance
matrix of the soil is defined by the dynamic stiffness matrix of nodes on the
interface between foundation and soil. As shown in Fig. 1, the rectangular
foundation (of dimension 2B along the x direction) is assumed to be a massless
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 641
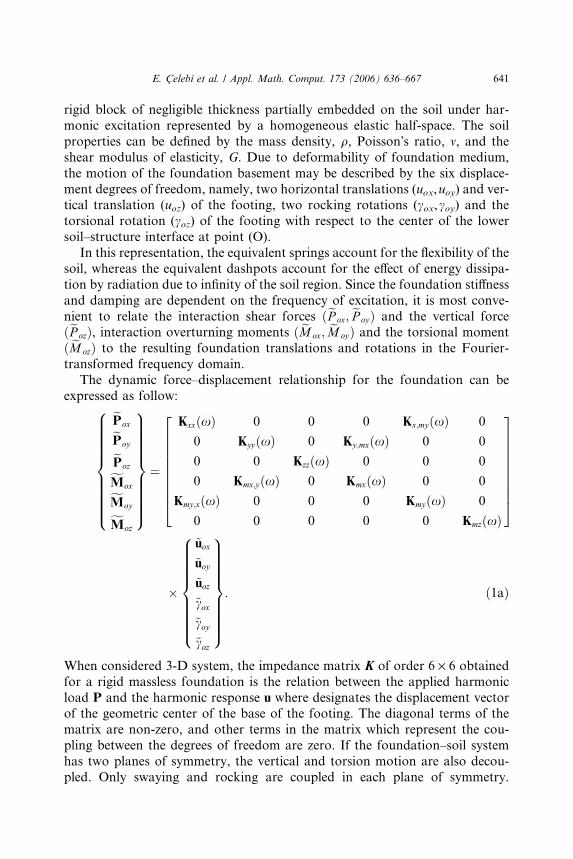
rigid block of negligible thickness partially embedded on the soil under har-
monic excitation represented by a homogeneous elastic half-space. The soil
properties can be defined by the mass density, q, Poisson�s ratio, m, and the
shear modulus of elasticity, G. Due to deformability of foundation medium,
the motion of the foundation basement may be described by the six displace-
ment degrees of freedom, namely, two horizontal translations (uox,uoy) and ver-tical translation (uoz) of the footing, two rocking rotations (cox,coy) and the
torsional rotation (coz) of the footing with respect to the center of the lower
soil–structure interface at point (O).
In this representation, the equivalent springs account for the flexibility of the
soil, whereas the equivalent dashpots account for the effect of energy dissipa-
tion by radiation due to infinity of the soil region. Since the foundation stiffness
and damping are dependent on the frequency of excitation, it is most conve-
nient to relate the interaction shear forces ðeP ox; eP oyÞ and the vertical forceðeP ozÞ, interaction overturning moments ð eMox; eMoyÞ and the torsional moment
ð eMozÞ to the resulting foundation translations and rotations in the Fourier-
transformed frequency domain.
The dynamic force–displacement relationship for the foundation can be
expressed as follow:ePoxePoyePozfMoxfMoyfMoz
8>>>>>>>>><>>>>>>>>>:
9>>>>>>>>>=>>>>>>>>>;¼
KxxðxÞ 0 0 0 Kx;myðxÞ 0
0 KyyðxÞ 0 Ky;mxðxÞ 0 0
0 0 KzzðxÞ 0 0 0
0 Kmx;yðxÞ 0 KmxðxÞ 0 0
Kmy;xðxÞ 0 0 0 KmyðxÞ 0
0 0 0 0 0 KmzðxÞ
2666666664
3777777775
�
~uox
~uoy
~uoz
~cox~coy~coz
8>>>>>>>><>>>>>>>>:
9>>>>>>>>=>>>>>>>>;. ð1aÞ
When considered 3-D system, the impedance matrix K of order 6 · 6 obtained
for a rigid massless foundation is the relation between the applied harmonic
load P and the harmonic response u where designates the displacement vectorof the geometric center of the base of the footing. The diagonal terms of the
matrix are non-zero, and other terms in the matrix which represent the cou-
pling between the degrees of freedom are zero. If the foundation–soil system
has two planes of symmetry, the vertical and torsion motion are also decou-
pled. Only swaying and rocking are coupled in each plane of symmetry.
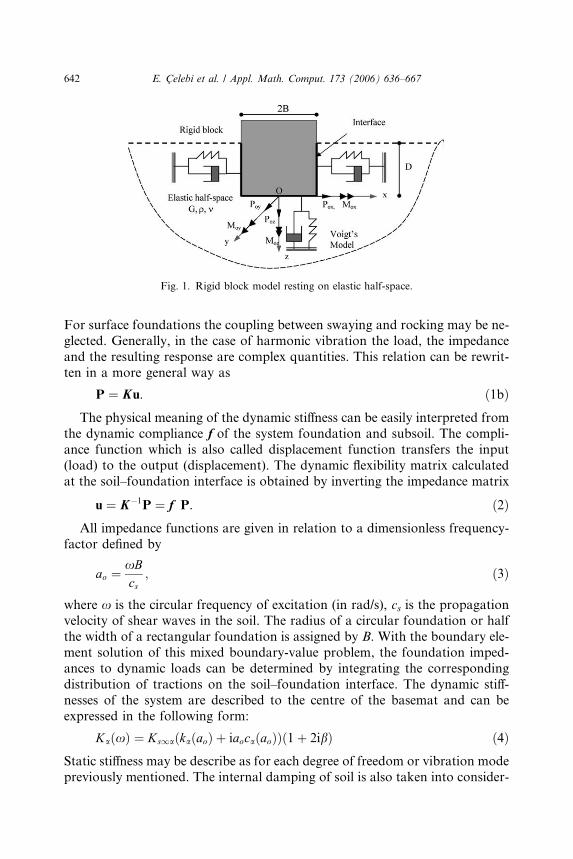
Fig. 1. Rigid block model resting on elastic half-space.
642 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
For surface foundations the coupling between swaying and rocking may be ne-
glected. Generally, in the case of harmonic vibration the load, the impedance
and the resulting response are complex quantities. This relation can be rewrit-
ten in a more general way as
P ¼ Ku. ð1bÞThe physical meaning of the dynamic stiffness can be easily interpreted from
the dynamic compliance f of the system foundation and subsoil. The compli-
ance function which is also called displacement function transfers the input
(load) to the output (displacement). The dynamic flexibility matrix calculated
at the soil–foundation interface is obtained by inverting the impedance matrix
u ¼ K�1P ¼ f P. ð2ÞAll impedance functions are given in relation to a dimensionless frequency-
factor defined by
ao ¼xBcs
; ð3Þ
where x is the circular frequency of excitation (in rad/s), cs is the propagationvelocity of shear waves in the soil. The radius of a circular foundation or half
the width of a rectangular foundation is assigned by B. With the boundary ele-
ment solution of this mixed boundary-value problem, the foundation imped-
ances to dynamic loads can be determined by integrating the corresponding
distribution of tractions on the soil–foundation interface. The dynamic stiff-
nesses of the system are described to the centre of the basemat and can be
expressed in the following form:
KaðxÞ ¼ Ks1aðkaðaoÞ þ iaocaðaoÞÞð1þ 2ibÞ ð4ÞStatic stiffness may be describe as for each degree of freedom or vibration mode
previously mentioned. The internal damping of soil is also taken into consider-

E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 643
ation and is characterized by the damping ratio b. The real parts of the imped-
ance functions signify force components in phase with the displacements and
can be termed as dynamic stiffness for the foundation. On the other hand,
the imaginary parts are force components in phase with the velocities and
can be interpreted as energy dissipation by radiation of waves away from the
foundation into the soil. Therefore, they may be termed as foundation damp-ing coefficients.
In order to compare the results of analytical approaches, the rectangular
footing is replaced by an equivalent circular footing in which the radius r is ob-
tained by writing that it has respectively the same area for the translation
movements and the same moment of inertia for the rotation movements. Static
stiffness is calculated by using the values relating to the circular surface footing.
Dynamic impedances of the foundation can be written as
• Horizontal vibration mode (a = xx,yy):
KaðxÞ ¼8Gr2� m
ðka þ iaocaÞ; r ¼ffiffiffiffiffiffiffiffiffi4BLp
r. ð5aÞ
• Vertical vibration mode (a = zz):
KaðxÞ ¼4Gr1� m
ðka þ iaocaÞ; r ¼ffiffiffiffiffiffiffiffiffi4BLp
r. ð5bÞ
• Rocking vibration mode (a = mx,my):
KaðxÞ ¼8Gr3a
3ð1� mÞ ðka þ iaocaÞ; rmx ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi16B3L3p
;4
srmy ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffi16BL3
3p
4
s. ð5cÞ
• Torsional vibration mode (a = mz):
KaðxÞ ¼16Gr3
3ðka þ iaocaÞ; r¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi8BLðB2 þ L2Þ
3p
4
s. ð5dÞ
• Coupling terms (a = mx,y;my,x):
KaðxÞ ¼8Gr2
2� mðka þ iaocaÞ; r ¼
ffiffiffiffiffiffiffiffiffi4BLp
r; ð5eÞ
where i is equalffiffiffiffiffiffiffi�1
p, ka is the dimensionless spring coefficient and ca is the cor-
responding damping coefficient depending on ao and the Poisson�s ratio m. Forthe terms of the main diagonal of the matrix K, a = xx (translation along x
axis), yy (translation along y axis), zz (translation along z axis); mx (rocking
about x axis), my (rocking about y axis), mz (rocking about z axis). The cou-
pling between swaying and rocking is defined by the indices of a = x,my,
y,mx,mx,y and my,x.
644 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
3. Theory of wave propagation in elastodynamic and frequency domain BEM
analysis
The BEM is important computational technique solving the boundary inte-
gral equations numerically for the modeling of wave propagation problems ap-
pear when dealing with the problems concerning infinite, semi-infinite or verylarge domains. The BEM formulation is based on the fundamental solution of
the differential equation of motion for a homogeneous, isotropic and linear-
elastic media proposed by Dominguez [14]. The dynamic response for the
points of the linear elastic body, X, bounded by the surface, C, subjected to
the body force components defined per unit volume, fi. Starting from equilib-
rium considerations, one obtains in components form of the differential equa-
tion of Lame Navier can be derived as;
rij;j þ fi ¼ q€ui; ð6Þwhere rij is the component of stress tensor and q€ui is the force due to inertia.
The commas and overdots indicate partial space and time derivatives of the
displacement components ui(x, t), respectively. As the linear relation between
the components of the stress tensor and the components of the strain tensor
for elastic isotropic solid known as constitutive law of Hook and it leads to
rij ¼ kdijekk þ 2leij; ð7aÞeij ¼ 1=2ðui;j þ uj;iÞ; ð7bÞ
where k and l are the Lame constants and dij is the Kronecker delta. The kine-
matical compatibility which is also called as volume dilatation can be expressed
as follow ekk = e11 + e22 + e33 for k = 1,2,3. Replacing (7) into (6) conducts to
the well known equation of the wave motion for the small displacement theory
of linear elastic materials;
ðkþ lÞui;ik þ luk;ii þ fk ¼ q€uk; ð8Þwhere a Cartesian coordinate system (i = 1,2,3) is used. The propagation
velocities of the dilatational (or pressure) and distortional (or shear) waves
are given by cp ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðkþ 2lÞ=q
pand cs ¼
ffiffiffiffiffiffiffiffil=q
pfor the case of plane strains
as well as for three dimensional problems, and the soil density is defined byq. In the case of time dependent excitations, the time dependence can be re-
moved by transforming the governing Eq. (8) by means of the transform tech-
niques. Applying a Fast Fourier Transform, the wave equation can be written
in the frequency domain as follow:
q½ðc2p � c2s Þ~ui;ik þ c2s~uk;ii � x2~uk� ¼ �~f k. ð9Þ
Above mentioned equation ~uk and ~f k denote the complex displacement and
force amplitudes, respectively, of a harmonic motion with circular frequency
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 645
x. When body forces are neglected and homogeneous initial conditions
carry out for all points x of the body X, then the so called Betti-Maxwell reci-
procal theorem can be used to find the boundary integral equation. This law
leads to
cik~u�i ¼
ZC
~u�ik~ti@C�ZC
~t�ik~ui@C; ð10Þ
where ~t�ikðx; n;xÞand ~u�ikðx; n;xÞ are the full-space fundamental solutions given
by Cruse and Rizzo [15] for the traction and displacement components, in the
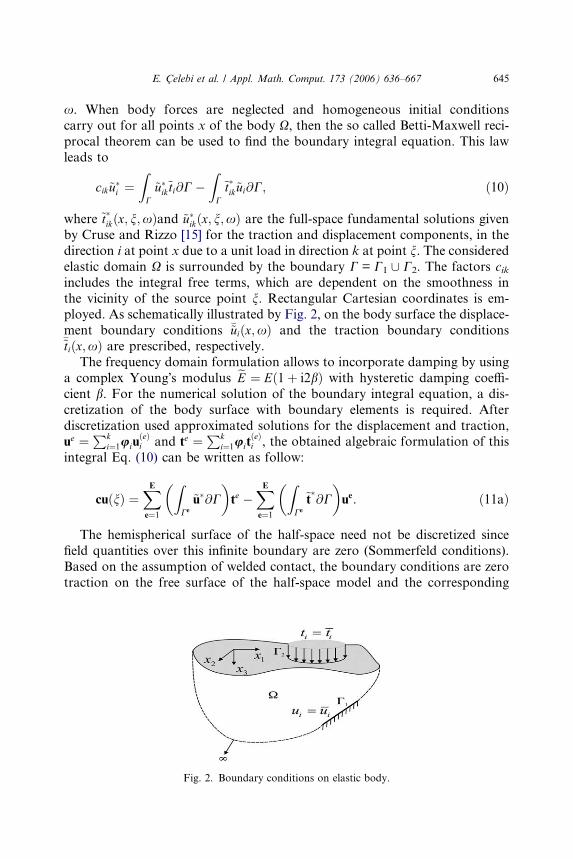
direction i at point x due to a unit load in direction k at point n. The consideredelastic domain X is surrounded by the boundary C = C1 [ C2. The factors cikincludes the integral free terms, which are dependent on the smoothness in
the vicinity of the source point n. Rectangular Cartesian coordinates is em-ployed. As schematically illustrated by Fig. 2, on the body surface the displace-
ment boundary conditions �~uiðx;xÞ and the traction boundary conditions�~tiðx;xÞ are prescribed, respectively.
The frequency domain formulation allows to incorporate damping by using
a complex Young�s modulus eE ¼ Eð1þ i2bÞ with hysteretic damping coeffi-
cient b. For the numerical solution of the boundary integral equation, a dis-
cretization of the body surface with boundary elements is required. After
discretization used approximated solutions for the displacement and traction,ue ¼
Pki¼1uiu
ðeÞi and te ¼
Pki¼1uit
ðeÞi , the obtained algebraic formulation of this
integral Eq. (10) can be written as follow:
cuðnÞ ¼XEe¼1
ZCe
~u�@C
� �te �
XEe¼1
ZCe
~t�@C
� �ue. ð11aÞ
The hemispherical surface of the half-space need not be discretized since
field quantities over this infinite boundary are zero (Sommerfeld conditions).
Based on the assumption of welded contact, the boundary conditions are zero
traction on the free surface of the half-space model and the corresponding
Fig. 2. Boundary conditions on elastic body.

646 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
displacement field at the soil–foundation contact area. Using this discretization
scheme and parametric representation the boundary integral equation reduces
to the following matrix form;
eU~t ¼ eT~u orU11 U12
U21 U22
" #t1
�t2
" #¼
T11 T12
T21 T22
" #�u1
u2
" #; ð11bÞ
where ~u and ~t are the complex frequency dependent displacements and trac-
tions of all nodal points at the boundary. The influence matrices for each
boundary elements Ce
eU ¼XEe¼1
ZCe
~u�@C
� �and eT ¼ cij þ
XEe¼1
ZCe
~t�@C
� �; ð12Þ
where
~u� ¼
u�11 u�12 u�13
u�21 u�22 u�23
u�31 u�32 u�33
26643775 and ~t
� ¼
t�11 t�12 t�13
t�21 t�22 t�23
t�31 t�32 t�33
26643775. ð13Þ
Different types of shape functions ui for approximated solution on which
the accuracy of the solution may depend can be chosen. For the underlying
half-space elements with constant space interpolation functions are used since
they require less computational time and memory but are able to represent well
the behavior of the half-space. Substitution of known boundary conditions
yields the remaining unknowns using standard matrix solution procedures.The impedance function is then obtained by integrating the resulting tractions
developed over the soil–foundation interfaces.
The calculated displacements and tractions in the frequency domain have to
be transformed with Discrete Inverse Fast Fourier Transform back into the
time domain [16]. For a function f and its transform F, the formulas for the
Discrete Fast Fourier Transform and the Inverse Fast Fourier Transform
are given as
F N ¼ TN
XN�1
k¼0
fke�i2pnkN ; ð14aÞ
fk ¼1
T
XN�1
n¼0
F ne�i2pnkN n ¼ 0; 1; 2; . . . ;N � 1; ð14bÞ
where N is the number of the chosen time steps and T is the period.
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 647
4. Numerical results
In this study, the discrete values of impedance functions over wide ranges
of frequency-factors for both surface-supported and embedded founda-
tions are presented by using the substructure approach in the frequency do-
main which is formulated on base of the BEM. It is demonstrated that thepractical applications so as to provide the user an adequate aid in the majority
of cases, a comprehensive parametric analysis and systematic calculations of
the idealized three dimensional model are performed with various controlling
parameters to estimate the dynamic response of the vibrating soil–foundation
system.
In all investigations accomplished in this parametric analysis, the complex
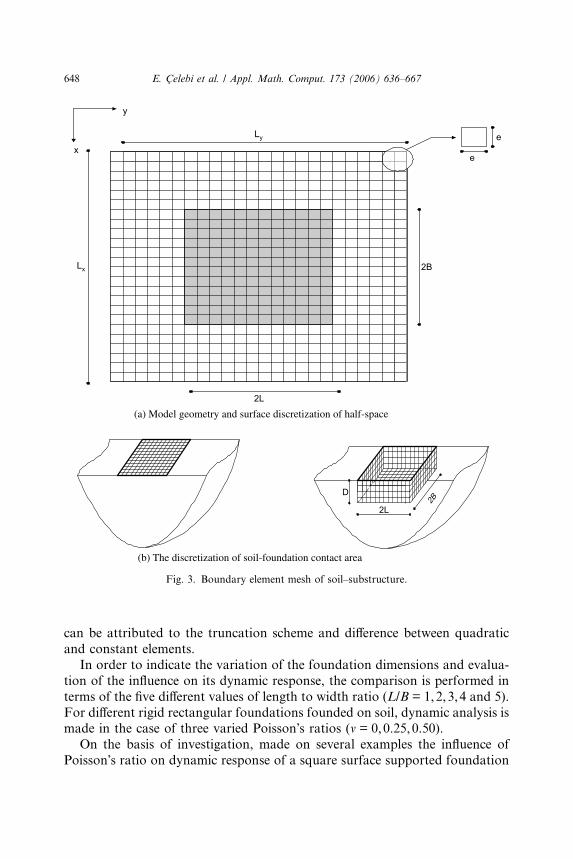
stiffness is computed for the dimensionless frequency factors ao [0.5:0.5:8]. As
shown in Fig. 3, the numerical model deals with the case of rectangular foot-ings supposedly rigid and massless with a length 2L (in the y direction) and
a width 2B (in the x direction). The foundation base is uniformly discretized
with 144 square elements. The basic dimension of a boundary element is taken
to be equal 1.0 m, which should be enough to consider the minimum wave-
length. Typically, four or five aligned elements per shortest wavelength are suf-
ficient. The maximum area of the mesh of the soil surface (Lx · Ly) that can be
taken into the analysis with acceptable computational time and memory
requirements, are considered as a size of 24 m · 24 m. The boundary elementwith the constant approximation is used. The algorithm works for constant
space interpolation as well as for elements with higher order space interpola-
tion functions. A mass density (q) of 20 kN/m3 and a material damping ratio
(b) of 0.0 characterize the supporting soil. Perfect bond between the foundation
and the soil is assumed.
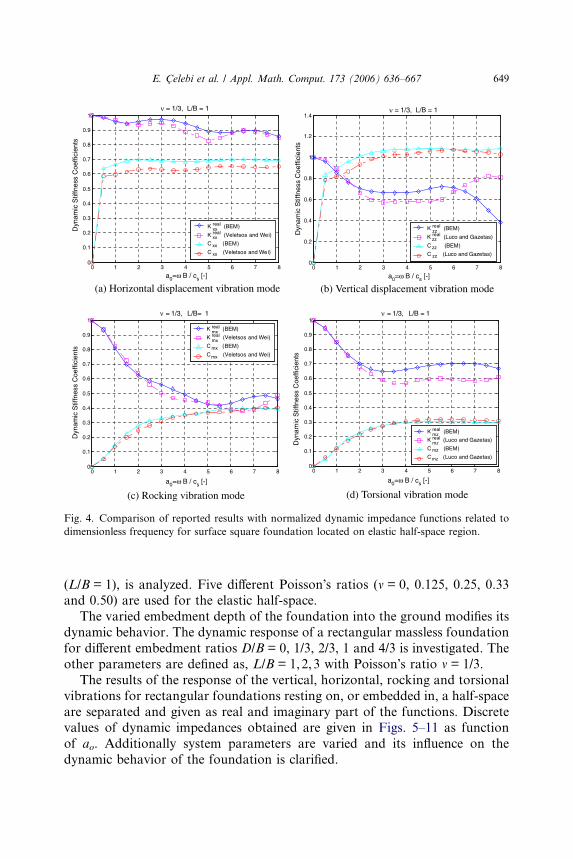
The impedance functions of the rigid square foundation resting on soil un-
der horizontal, vertical, rocking and torsional excitations are determined and
normalized with the corresponding static-stiffness coefficients. The normalizedspring and damping coefficients for foundations under previously mentioned
vibrational modes are shown in Fig. 4. The results are then compared with
the reported results [17,18,6]. The graphs for the normalized spring coefficient
and damping coefficient for horizontal and rocking vibration modes, as shown
in Fig. 4(a) and (c), are reasonably asymptotic with the reported solutions at
lower and higher frequency range. In addition, the variation of damping coef-
ficients for vertical and torsional modes is good agreement with the corre-
sponding results obtained by the reported analysis. For moderate and highfrequency parameters, the normalized spring coefficient for torsional mode is
discrepant then the reported results, but the difference is within 15%. The com-
parisons show that considerable discrepancies exist in the vertical vibrational
mode for spring coefficient at high frequency range (ao P 6.5). This distinction
e
e
2L
2B
Ly
Lx
y
x
(a) Model geometry and surface discretization of half-space
(b) The discretization of soil-foundation contact area
D
2L2B
Fig. 3. Boundary element mesh of soil–substructure.
648 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
can be attributed to the truncation scheme and difference between quadratic
and constant elements.
In order to indicate the variation of the foundation dimensions and evalua-
tion of the influence on its dynamic response, the comparison is performed in
terms of the five different values of length to width ratio (L/B = 1,2,3,4 and 5).
For different rigid rectangular foundations founded on soil, dynamic analysis ismade in the case of three varied Poisson�s ratios (m = 0,0.25,0.50).
On the basis of investigation, made on several examples the influence of
Poisson�s ratio on dynamic response of a square surface supported foundation
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1= 1/3, L/B = 1 = 1/3, L/B = 1
Dyn
amic
Stif
fnes
s C
oeffi
cien
ts
Dyn
amic
Stif
fnes
s C
oeffi
cien
tsD
ynam
ic S
tiffn
ess
Coe
ffici
ents
K xx real (BEM)
K xx real (Veletsos and Wei)
C xx (BEM)
C xx (Veletsos and Wei)
(a) Horizontal displacement vibration mode
0 1 2 3 4 5 6 7 80
0.2
0.4
0.6
0.8
1
1.2
1.4
K zzreal (BEM)
K zzreal (Luco and Gazetas)
C zz (BEM)
C zz (Luco and Gazetas)
(b) Vertical displacement vibration mode
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1 = 1/3, L/B= 1
Dyn
amic
Stif
fnes
s C
oeffi
cien
ts
K mxreal (BEM)
Kmxreal (Veletsos and Wei)
C mx (BEM)
Cmx (Veletsos and Wei)
(c) Rocking vibration mode
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1 = 1/3, L/B = 1
K mzreal (BEM)
Kmzreal (Luco and Gazetas)
C mz (BEM)
Cmz (Luco and Gazetas)
(d) Torsional vibration mode
Fig. 4. Comparison of reported results with normalized dynamic impedance functions related to
dimensionless frequency for surface square foundation located on elastic half-space region.
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 649
(L/B = 1), is analyzed. Five different Poisson�s ratios (m = 0, 0.125, 0.25, 0.33and 0.50) are used for the elastic half-space.
The varied embedment depth of the foundation into the ground modifies its
dynamic behavior. The dynamic response of a rectangular massless foundation
for different embedment ratios D/B = 0, 1/3, 2/3, 1 and 4/3 is investigated. The
other parameters are defined as, L/B = 1,2,3 with Poisson�s ratio m = 1/3.
The results of the response of the vertical, horizontal, rocking and torsional
vibrations for rectangular foundations resting on, or embedded in, a half-space
are separated and given as real and imaginary part of the functions. Discretevalues of dynamic impedances obtained are given in Figs. 5–11 as function
of ao. Additionally system parameters are varied and its influence on the
dynamic behavior of the foundation is clarified.
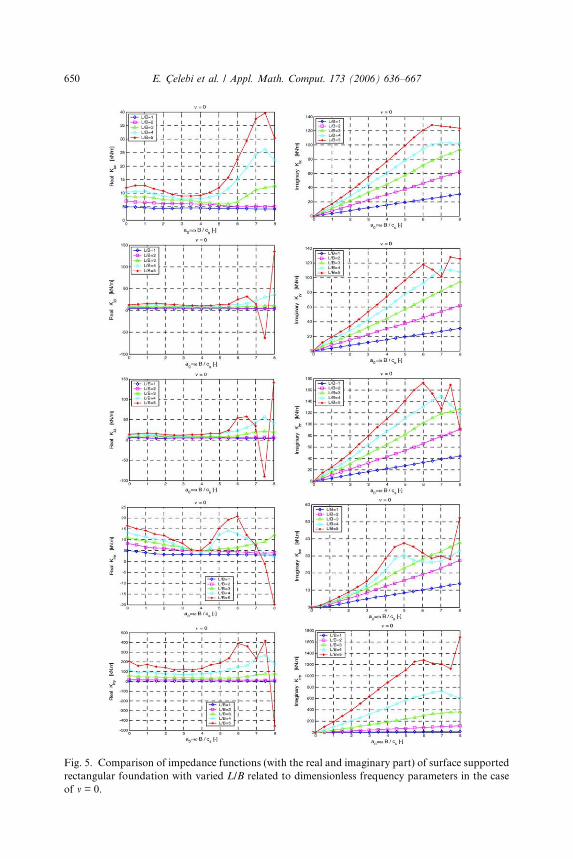
Fig. 5. Comparison of impedance functions (with the real and imaginary part) of surface supported
rectangular foundation with varied L/B related to dimensionless frequency parameters in the case
of m = 0.
650 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
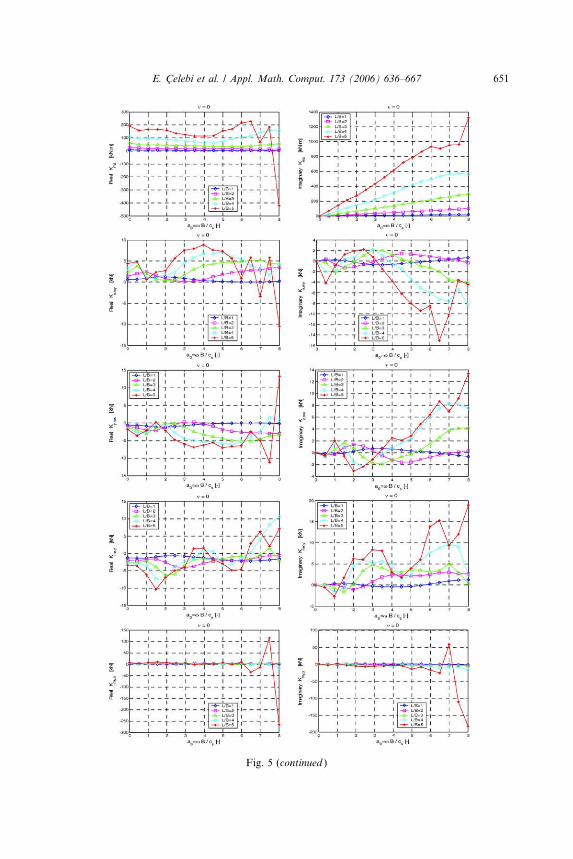
Fig. 5 (continued )
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 651
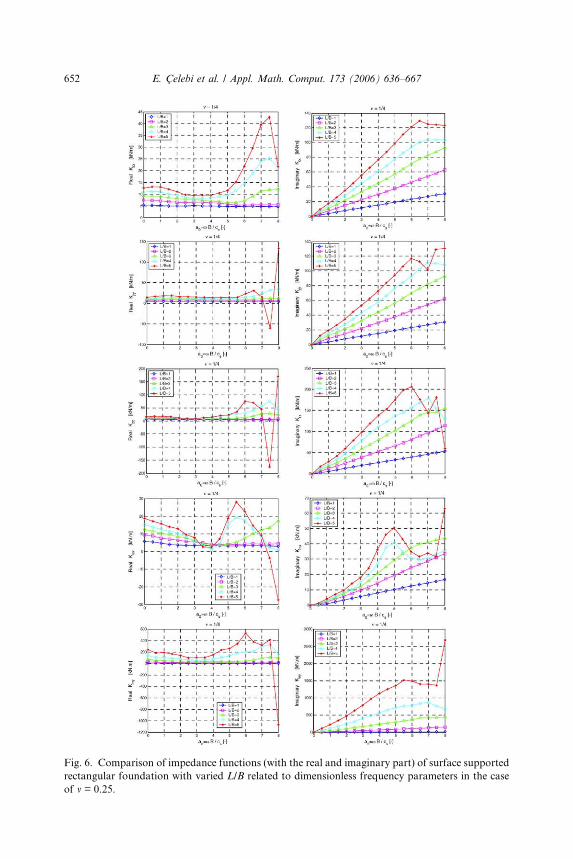
Fig. 6. Comparison of impedance functions (with the real and imaginary part) of surface supported
rectangular foundation with varied L/B related to dimensionless frequency parameters in the case
of m = 0.25.
652 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
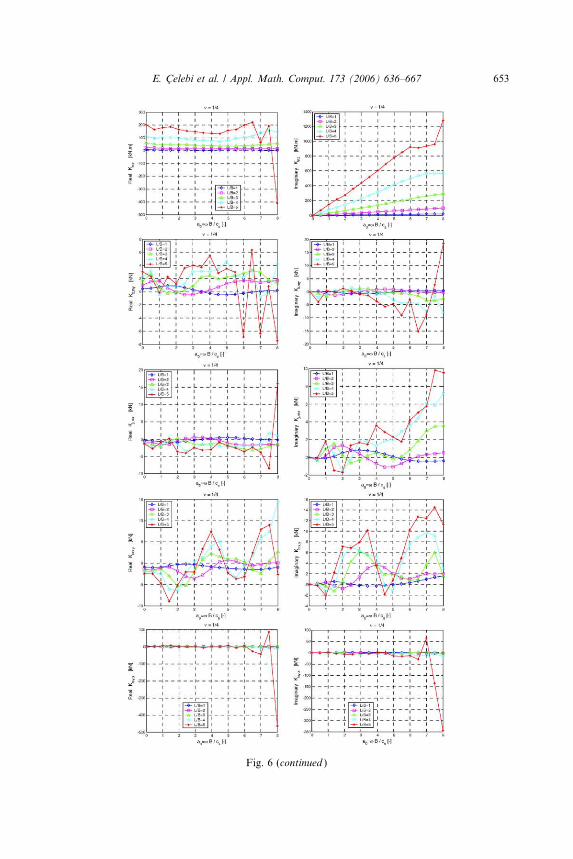
Fig. 6 (continued )
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 653
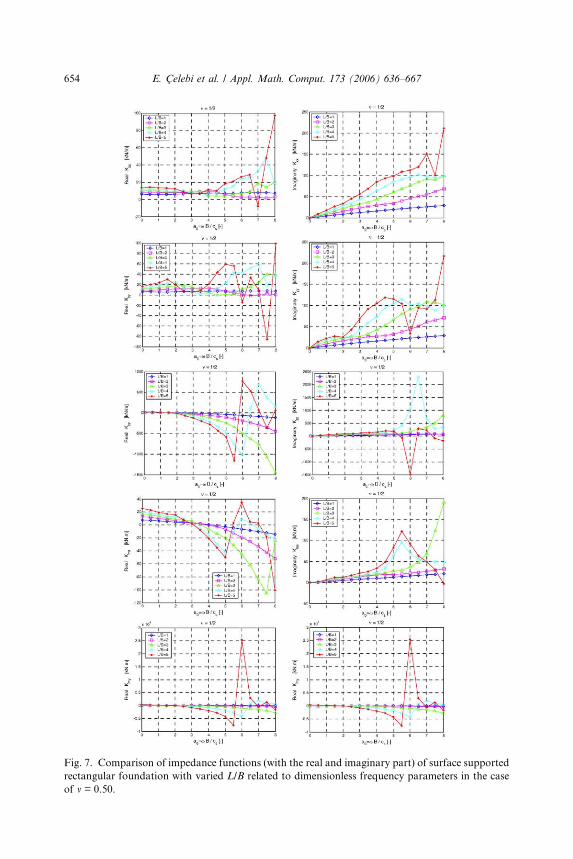
Fig. 7. Comparison of impedance functions (with the real and imaginary part) of surface supported
rectangular foundation with varied L/B related to dimensionless frequency parameters in the case
of m = 0.50.
654 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
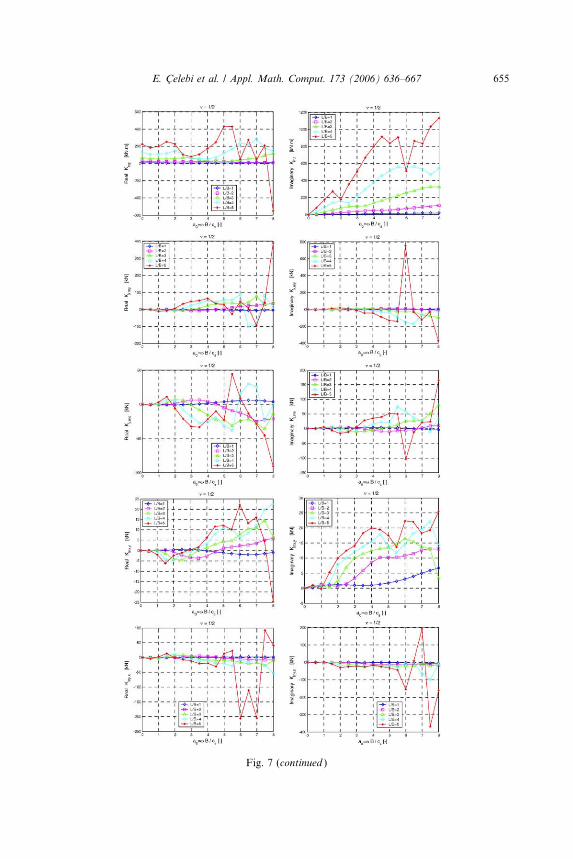
Fig. 7 (continued )
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 655
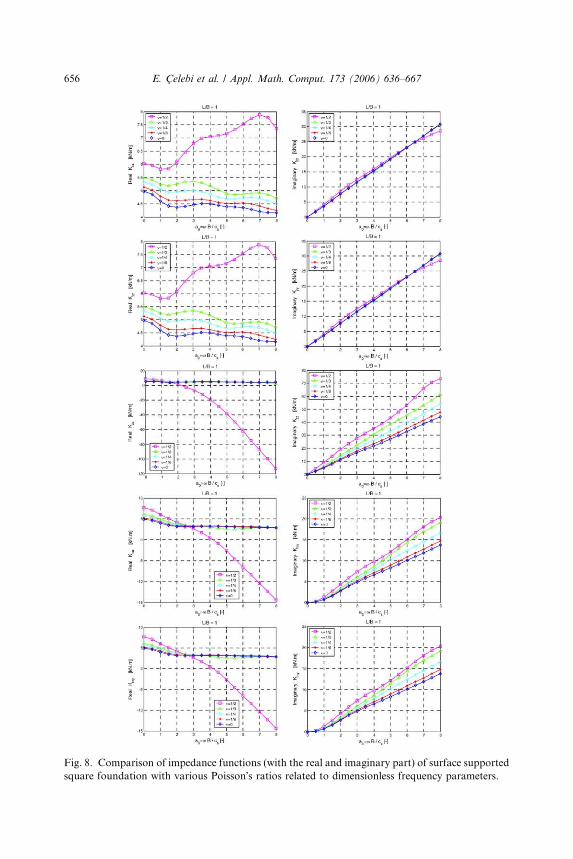
Fig. 8. Comparison of impedance functions (with the real and imaginary part) of surface supported
square foundation with various Poisson�s ratios related to dimensionless frequency parameters.
656 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
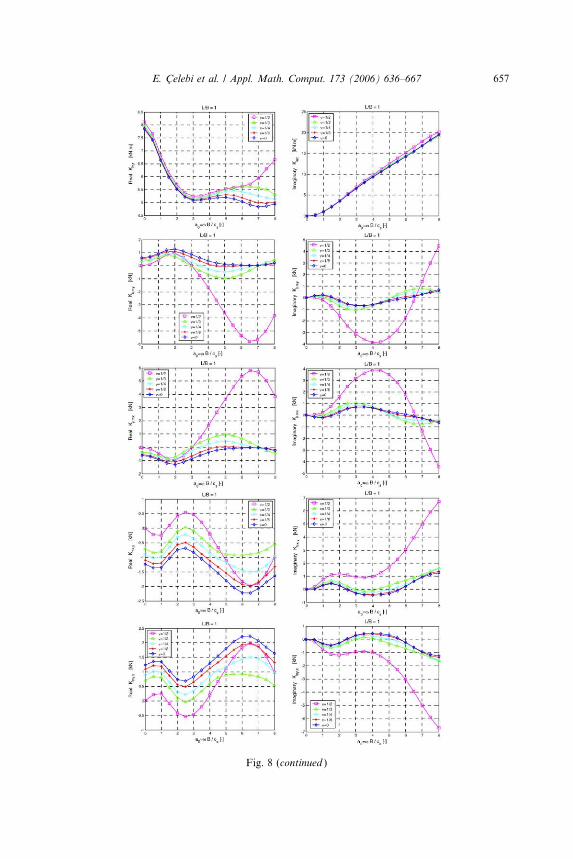
Fig. 8 (continued )
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 657
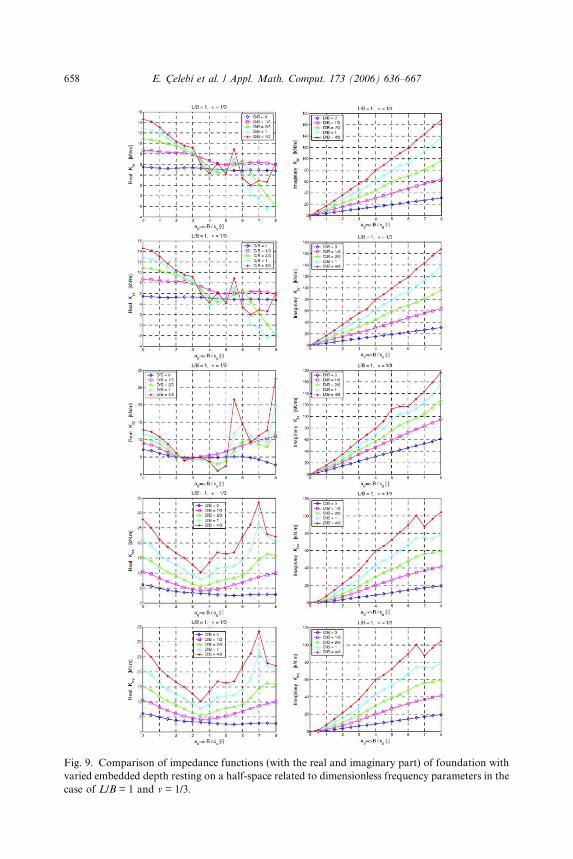
Fig. 9. Comparison of impedance functions (with the real and imaginary part) of foundation with
varied embedded depth resting on a half-space related to dimensionless frequency parameters in the
case of L/B = 1 and m = 1/3.
658 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
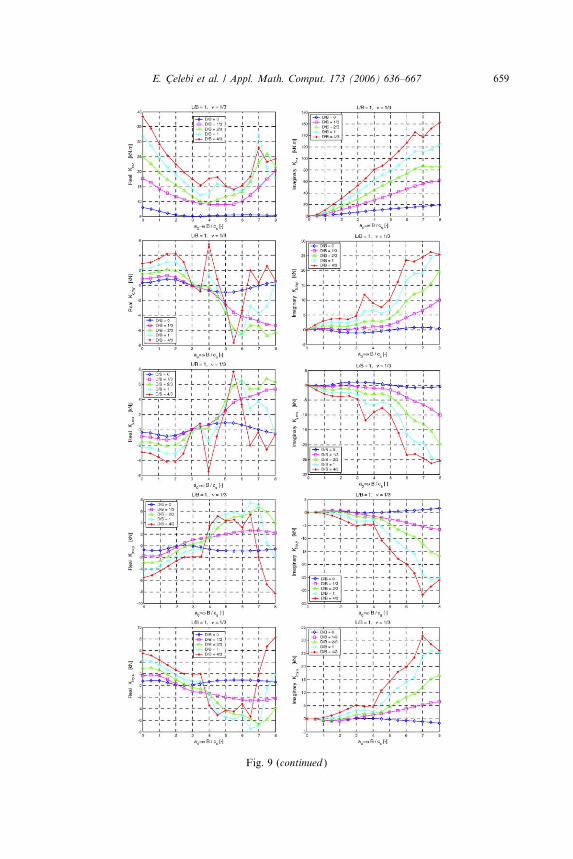
Fig. 9 (continued )
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 659
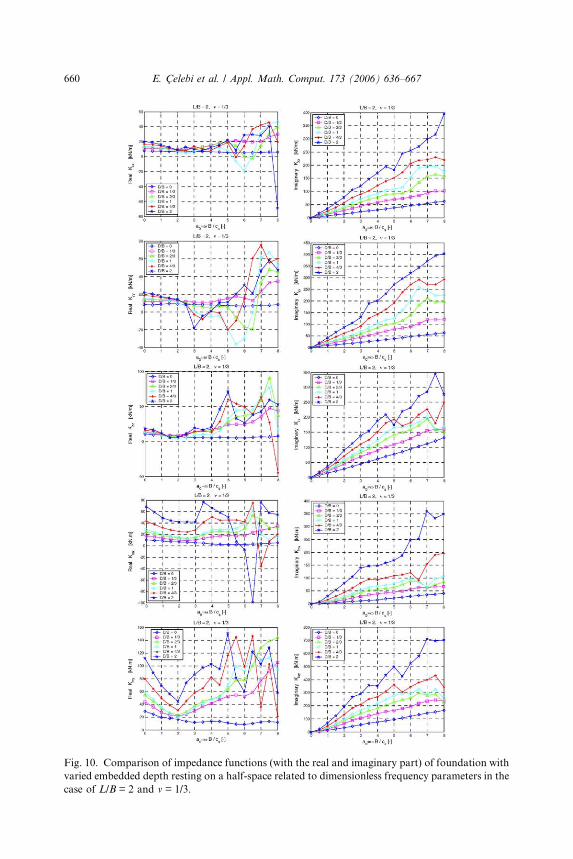
Fig. 10. Comparison of impedance functions (with the real and imaginary part) of foundation with
varied embedded depth resting on a half-space related to dimensionless frequency parameters in the
case of L/B = 2 and m = 1/3.
660 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
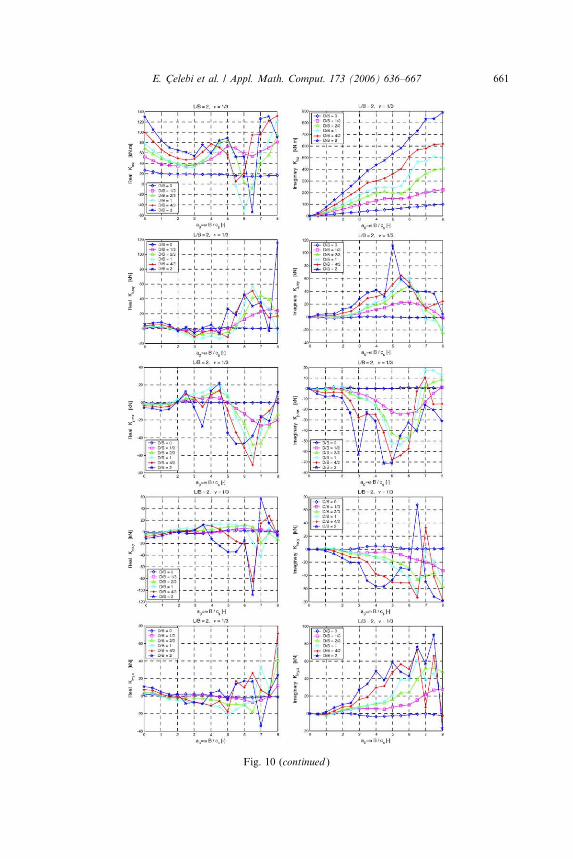
Fig. 10 (continued )
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 661
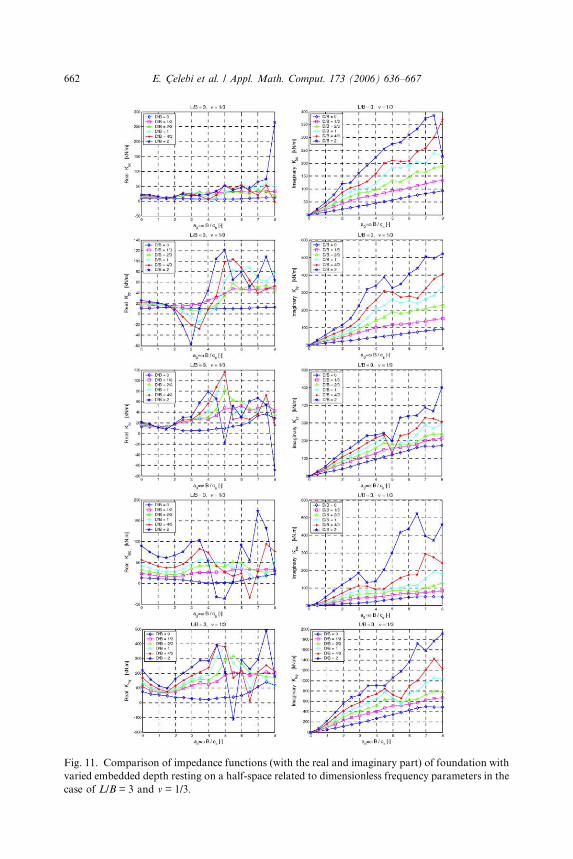
Fig. 11. Comparison of impedance functions (with the real and imaginary part) of foundation with
varied embedded depth resting on a half-space related to dimensionless frequency parameters in the
case of L/B = 3 and m = 1/3.
662 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
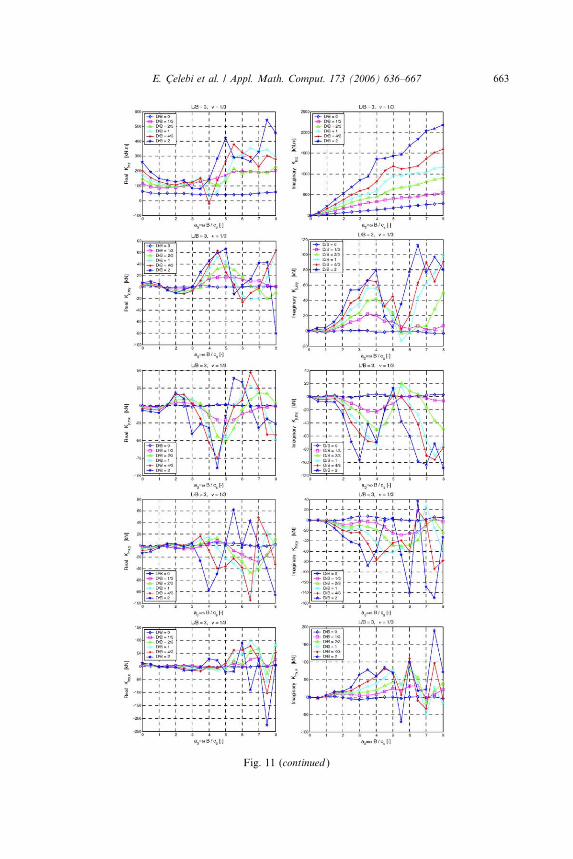
Fig. 11 (continued )
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 663
664 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
5. Discussion of results
Numerical results of this study show certain features of practical impor-
tance. The following trends can be noticed:
1. Dynamic behaviors of square and rectangular foundations indicate differ-ences in the resulting curves regarding the surface foundation for several
vibrational modes. Especially, stiffness and damping coefficients of founda-
tions for horizontal and torsional vibration modes increases with increasing
ao as the ratio of L/B rised. On the contrary, in the case of vertical excita-
tions, the geometry of foundation doesn�t influence the dynamic impedance
values, especially, from lower frequency range to moderate frequency range
as defined 0 6 ao 6 5. In addition, stiffness and damping coefficients for
rocking vibration mode vary with the direction of harmonic effect. Springcoefficient, however, increases remarkably with the ratio L/B at higher fre-
quency range (ao P 5).
2. In general, the variation of Poisson ratio on the spring stiffness for surface
square foundations has superior effects according to geometrical damping.
This tendency becomes pronounced in the higher frequency values. This
effect�s presency cannot be seen for all modes unless the Poisson ratio is
equal to 1/3. Particularly, for the value of Poisson ratio is 1/2, translation,
rocking and coupling between translation-rocking stiffnesses appear todecreasing trend to the higher frequency values.
3. The stiffness coefficients, which are obtained for all vibrational modes of
embedded square foundations, varied depending mainly on dimensionless
frequency parameters. This tendency increases at the higher frequency val-
ues only for the case of surface foundations (D/B = 0). Only for the surface
foundation horizontal translation stiffness, Kxx, and horizontal translation-
rocking stiffness, Kmy,x, do not change with frequency. Furthermore, in the
lateral vibration mode, spring stiffness coefficients of embedded foundationsto compare surface foundations, take lower values in the middle and higher
frequency interval. These results contradict the general rule that embedment
increases the impedance functions. The decreases of stiffness coefficients
with increasing of frequency parameter ao may create a serious case for ver-
tical vibrations then for horizontal ones.
4. The decrease of the flexibility coefficients which connects the lateral dis-
placement to moment while embedding increase show that, from the stiffness
point of view, coupling between these two degrees of freedom increase inver-sely with the embedding. For the surface foundations this coupling term
remains small so that it can be neglected. In addition, this interaction term
Kmy,x may take negative values at the higher frequencies for the embedded
foundation cases. Similar case has also been obtained for the cases where
circular foundations founded on half-space soil model [6]. It has been seen
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 665
that the embedment mostly affects the moment-rocking and moment-
torsional relations.
5. For the embedded foundations (D/B = 4/3) vertical spring stiffness decreases
remarkably for the lower frequency parameter values (ao < 3) while for the
surface foundations variation of this stiffness is leaded towards a constant
value. Although Pais and Kausel [19] and Tsai et al. [20] used the assump-tion that vertical stiffness is independent from frequency for these two foun-
dation types. This assumption is not feasible for the deep foundation
samples applied for the incompressible soil at the middle and higher fre-
quency interval.
6. As embedding ratio of foundations to soil increase both the real and imag-
inary parts of stiffness coefficients increase. In other words the elements of
flexibility matrix which is the inverse of the stiffness matrix can be propor-
tionally smaller as the foundation becomes deeper. The increase of buildingfoundation and its surface contact area with embedment promote the higher
damping effect. That is, waves propagating from the superstructure into the
ground are not turn back due to boundless soil medium and this causes an
energy loss. As the energy loss depends on the frequency this leads to an
additional viscous damping effect. This indicates that spring effect, describ-
ing the soil stiffness in the embedded foundations and geometrical damping
effect, corresponding to equivalent radiation damping, is more pronounced
with respect to surface foundation for all vibrational modes.
6. Conclusions
In this study, the discrete values of impedance functions over wide ranges of
frequency-factors are presented for both surface-supported and embedded
foundations. The numerical results are obtained by using the substructureapproach in the frequency domain which is formulated on basis of the BEM
derived from the fundamental solution for a homogeneous, isotropic and lin-
ear-elastic continuum.
The numerical model is validated in almost all cases of vibration modes for
its ability to represent the foundations on elastic half-space medium by com-
paring the results with the analytical solutions of reported analysis.
This paper presented that in almost all vibration modes of impedance func-
tions of three-dimensional surface supported and embedded foundation mod-els over wide ranges of frequency-factors so as to provide the user with an
adequate aid in the majority of cases. It has been demonstrated that in practical
applications and to show the solutions of this type of problems to civil engi-
neers, a comprehensive parametric analysis and systematic calculations have
been performed with various controlling parameters to evaluate the dynamic
666 E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667
response of the vibrating soil–foundation system. The obtained numerical re-
sults should enable practicing engineers to take into account the linear SSI
problems for wide ranges of frequency factors. The civil engineers who have
to design significant constructions on soft ground imposed to dynamic loads
will therefore be delighted by the appearance of these clear and easily under-
standable diagrams of dynamic impedance functions.
Acknowledgement
This project is supported by the Turkish State Planning Organization (DPT,
2003 K 120 970) is greatly acknowledged. Also, the first author would like to
express his sincere thanks to the Deutsche Akademische Austauschdienst
(DAAD) for the financial support of his research stay at the Ruhr UniversityBochum (DAAD, contact number: A/03/21308). In particular, the author
wishes to thank Gunther Schmid for using the numerical simulations and pro-
gramming and for his intensive interest and helpful comments.
References
[1] J.P. Wolf, Spring–dashpot–mass models for foundation vibrations, Earthquake Engineering
and Structural Dynamics 26 (1997) 931–949.
[2] O. Estorff, E. Kausel, Coupling of boundary and finite elements for soil–structure interaction
problems, Earthquake Engineering and Structural Dynamics 18 (1989) 1065–1075.
[3] J.P. Wolf, C. Song, Finite Element Modelling of Unbounded Media, John Wiley & Sons,
London, 1997.
[4] C. Bode, R. Hirschauer, S.A. Savidis, Soil–structure interaction in the time domain using
halfspace Green�s functions, Soil Dynamics and Earthquake Engineering 22 (4) (2002) 283–
295.
[5] J. Dominguez, J.M. Roesset, Dynamic stiffness of rectangular foundations, MIT Research
Report, R. 78-20, 1978.
[6] A.S. Veletsos, Y.T. Wei, Lateral and rocking vibration of footings, Journal of Soil Mechanics
and Foundations, ASCE 97 (1971) 1227–1248.
[7] J.E. Luco, R.A. Westman, Dynamic response of a rigid footing bonded to an elastic half-
space, Journal of Applied Mechanics, ASME 94 (1972) 527–534.
[8] R.J. Apsel, J.E. Luco, Impedance functions for foundations embedded in a layered medium:
an integral equation approach, Earthquake Engineering and Structural Dynamics 15 (1987)
213–231.
[9] G. Gazetas, J.L. Tassoulas, Horizontal stiffness of arbitrarily shaped embedded foundations,
Journal of Geotechnical Engineering, ASCE 113 (1987) 440–457.
[10] G. Gazetas, J.L. Tassoulas, Horizontal damping of arbitrarily shaped embedded foundations,
Journal of Geotechnical Engineering, ASCE 113 (1987) 458–475.
[11] A. Mita, J.E. Luco, Dynamic response of a square foundation embedded in an elastic half-
space, Soil Dynamics and Earthquake Engineering 8 (1987) 54–67.
[12] S. Bu, Impedance functions of square foundations embedded in an incompressible half-space,
Engineering Analysis with Boundary Element 22 (1998) 1–11.
E. Celebi et al. / Appl. Math. Comput. 173 (2006) 636–667 667
[13] S. Bu, C.H. Lin, Coupled horizontal-rocking impedance functions for embedded square
foundations at high frequency factors, Journal of Earthquake Engineering 3 (4) (1999) 561–
587.
[14] J. Dominguez, Boundary Elements in Dynamics, Computational Mechanics Publications,
1993.
[15] T.A. Cruse, F.J. Rızzo, A direct formulation and numerical solution of the general transient
elastodynamic problem I, Journal of Mathematical Analysis and Applications 22 (1968) 244–
259.
[16] E. Brigham, FFT Schnelle Fourier Transformation, 6. Auflage, Oldenburg Verlag, Munchen,
1995.
[17] J.E. Luco, Impedance functions for a rigid foundation on a layered medium, Nuclear
Engineering and Design 33 (1974) 204–217.
[18] G. Gazetas, Analysis of machine foundation vibrations: state of the art, Soil Dynamics and
Earthquake Engineering 2 (1) (1983) 2–42.
[19] A. Pais, E. Kausel, Approximate formulas for dynamic stiffnesses of rigid foundations, Soil
Dynamics and Earthquake Engineering 7 (1988) 213–227.
[20] N.C. Tsai, D. Niehoff, M. Swatta, A.H. Hadjian, The use of frequency independent soil–
structure interaction parameters, Nuclear Engineering and Design 31 (1974) 168–183.