informatik laplacian surface editing olga sorkine daniel cohen-or yaron lipman tel aviv university...
TRANSCRIPT

INFORMATIK
Laplacian Surface EditingOlga Sorkine Daniel Cohen-Or Yaron Lipman
Tel Aviv University
Marc Alexa
TU Darmstadt
Christian Rössl Hans-Peter Seidel
Max-Planck Institut für Informatik

INFORMATIKDifferential coordinates
Intrinsic surface representation Allows various surface editing operations:
– Detail-preserving mesh editing

INFORMATIKDifferential coordinates
Intrinsic surface representation Allows various surface editing operations:
– Detail-preserving mesh editing– Coating transfer

INFORMATIKDifferential coordinates
Intrinsic surface representation Allows various surface editing operations:
– Detail-preserving mesh editing– Coating transfer– Mesh transplanting

INFORMATIKWhat is it?
Differential coordinates are defined by the discrete Laplacian operator:
For highly irregular meshes: cotangent weights [Desbrun et al. 99]
( )
1( )
j N ii
Ld
i i i jδ v v v
average of the neighbors

INFORMATIKWhy differential coordinates?
They represent the local detail / local shape description– The direction approximates the normal– The size approximates the mean curvature
( )
1
N iid
i iv
δ v v 1
( )ds
len
i
v
v v
( ) 0
1lim ( )
( )lends H
len
i i i
v
v v v n

INFORMATIKWhy differential coordinates?
Local detail representation – enables detail preservation through various modeling tasks
Representation with sparse matrices Efficient linear surface reconstruction

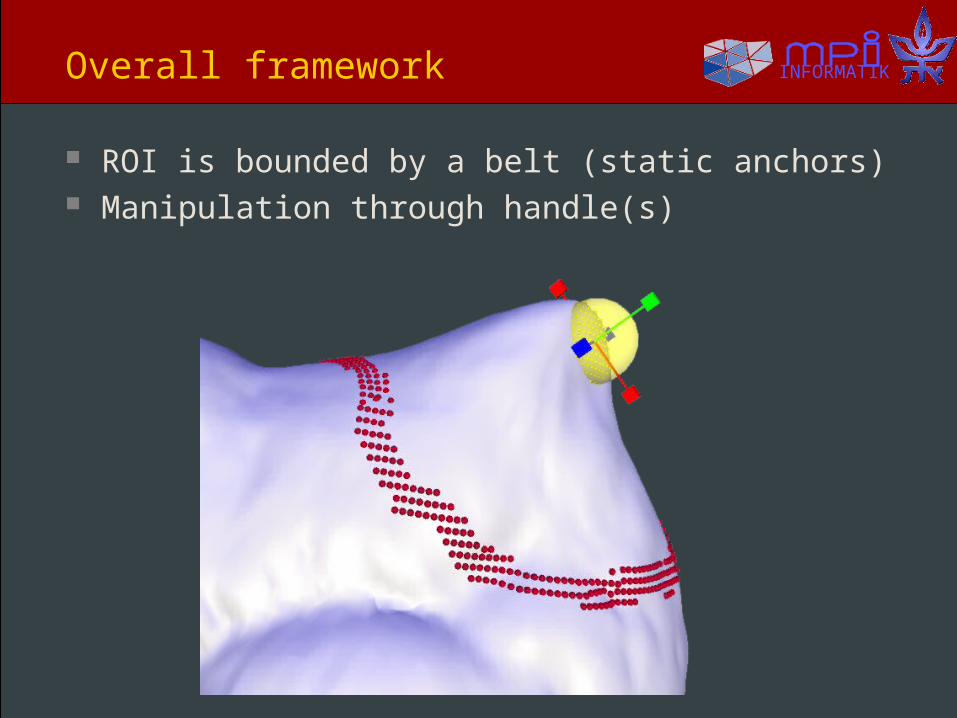
INFORMATIKOverall framework
Compute differential representation
Pose modeling constraints
Reconstruct the surface – in least-squares sense
( )L V
,i i i C v u
2 2arg min ( ) i
i Ci
VV L V
uv
INFORMATIKOverall framework
ROI is bounded by a belt (static anchors) Manipulation through handle(s)

INFORMATIKRelated work
Multi-resolution: [Zorin el al. 97], [Kobbelt et al. 98], [Guskov et al. 99], [Boier-Martin et al. 04], [Botsch and Kobbelt 04] 2
Laplacian smoothing: Taubin [SIGGRAPH 95] Laplacian Morphing: Alexa [TVC 03] Image editing: Perez et al. [SIGGRAPH 03] Mesh Editing: Yu et al. [SIGGRAPH 04]

INFORMATIKProblem: invariance to transformations
The basic Laplacian operator is translation-invariant, but not rotation- and scale-invariant
Reconstruction attempts to preserve the original global orientation of the details

INFORMATIKInvariance – solutions
Explicit transformation of the differential coordinates prior to surface reconstruction
– Lipman, Sorkine, Cohen-Or, Levin, Rössl and Seidel, “Differential Coordinates for Interactive Mesh Editing“, SMI 2004
• Estimation of rotations from naive reconstruction
– Yu, Zhou, Xu, Shi, Bao, Guo and Shum, “Mesh Editing With Poisson-Based Gradient Field Manipulation“, SIGGRAPH 2004
• Propagation of handle transformation to the rest of the ROI

INFORMATIKEstimation of rotations
[Lipman et al. 2004] estimate rotation of local frames– Reconstruct the surface with the original Laplacians– Estimate the normals of underlying smooth surface– Rotate the Laplacians and reconstruct again
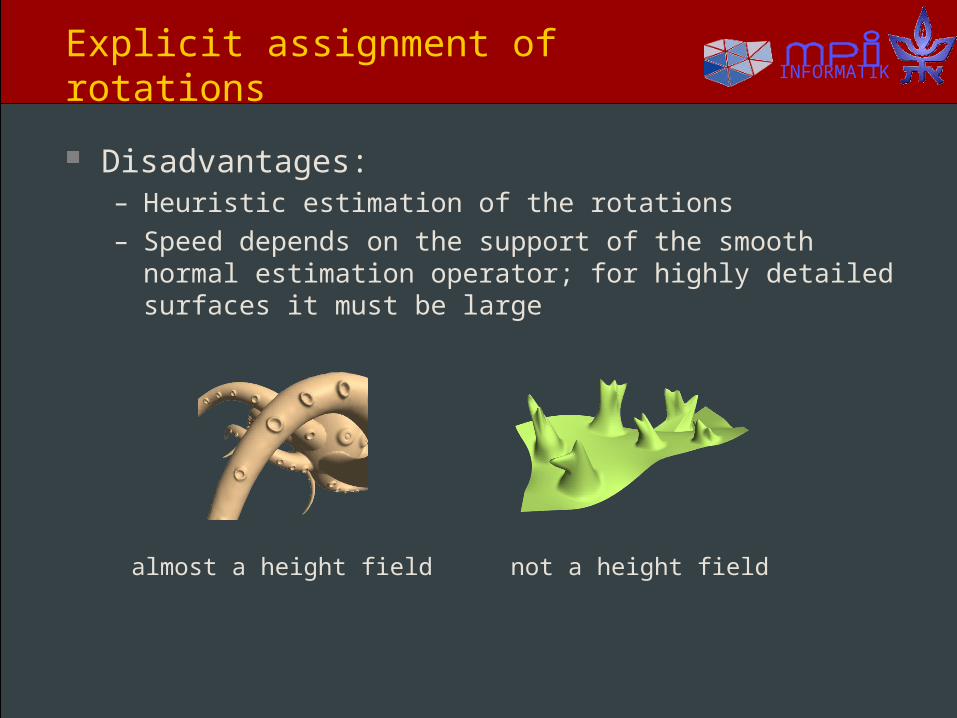
INFORMATIKExplicit assignment of rotations
Disadvantages:– Heuristic estimation of the rotations– Speed depends on the support of the smooth normal estimation
operator; for highly detailed surfaces it must be large
almost a height field not a height field

INFORMATIKImplicit definition of transformations
The idea: solve for local transformations AND the edited surface simultaneously!
22
1
arg min ( ) ( )n
ii jV
ji
ij C
LV T
δv v u
Transformationof the local frame

INFORMATIKDefining the transformations Ti
How to formulate Ti ?
– Based on the local (1-ring) neighborhood
– Linear dependence on the unknown vi’
1
2 2
1
kk
ii
i
i
i
i
i i
i
T
T
T
v v
v
v
v
v
22
1
arg min ( ) ( )n
ii jV
ji
ij C
LV T
δv v u
Members of the 1-ring of i-th vertex
iT

INFORMATIKDefining the transformations Ti
First attempt: define Ti simply by solving
2
1
arg minj j
i
i
k
i ij
iT
TT
v v
1 21 2
| | |
| | |
| | |
| | |k ki i i i iiiT
vv v vv v
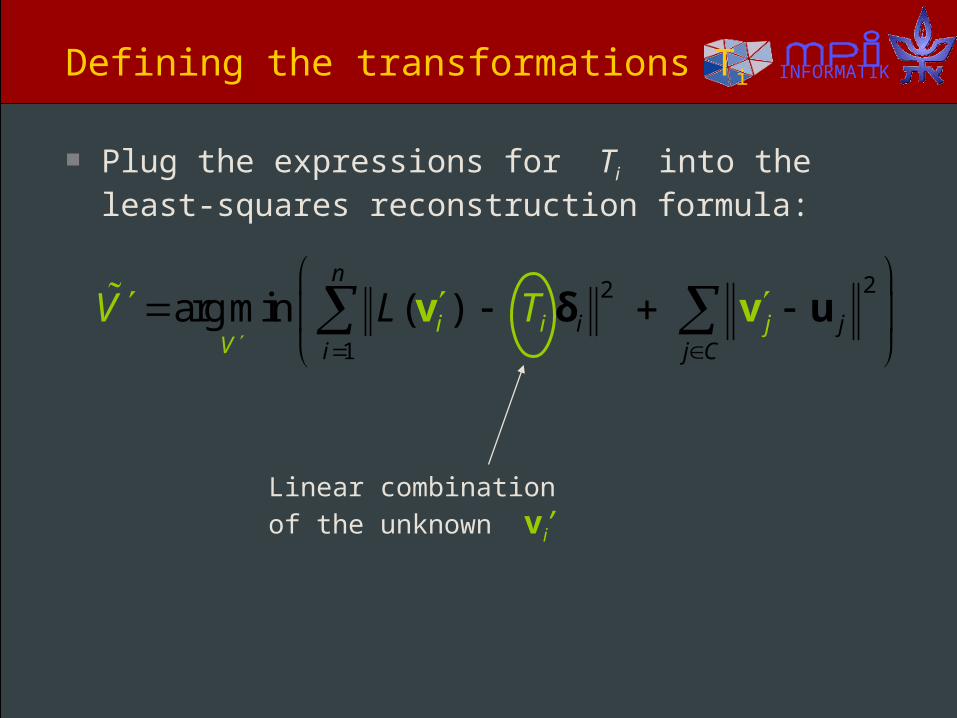
INFORMATIKDefining the transformations Ti
Plug the expressions for Ti into the least-squares reconstruction formula:
22
1
arg min ( )n
i ji
i ij
jV C
V TL
v vδ u
Linear combination
of the unknown vi’

INFORMATIKConstraining Ti
Trivial solution for Ti will result in membrane surface reconstruction
To preserve the shape of the details we constrain Ti to rotations, uniform scales and translations
11 12 13 14
21 22 23 24
31 32 33 34
41 42 43 44
i
t t t t
t t t tT
t t t t
t t t t
Linear constraints on tlm
so that Ti is rotation+scale+translation
??
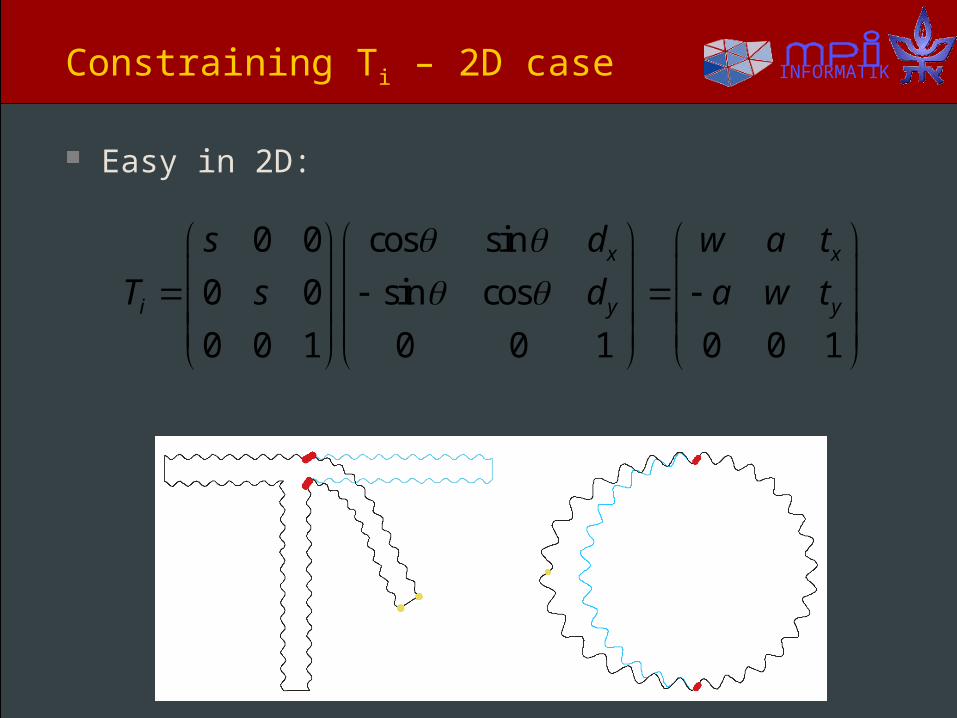
INFORMATIKConstraining Ti – 2D case
Easy in 2D:
0 0 cos sin
0 0 sin cos
0 0 1 0 0 1 0 0 1
x x
i y y
s d w a t
T s d a w t

INFORMATIKConstraining Ti – 3D case
Not linear in 3D:
Linearize by dropping the quadratic term
rotation +exp
uniform scaleTs H s I H
h h
is 3 3 skew-symmetric, H H x h x

INFORMATIKAdjusting Ti
Due to linearization, Ti scale the space along the h axis by cos
When is large, this causes anisotropy
Possible correction:– Compute Ti , remove the scaling component and reconstruct the
surface again from the corrected i
– Apply our technique from [Lipman et al. 04] first, and then the current technique – with small .

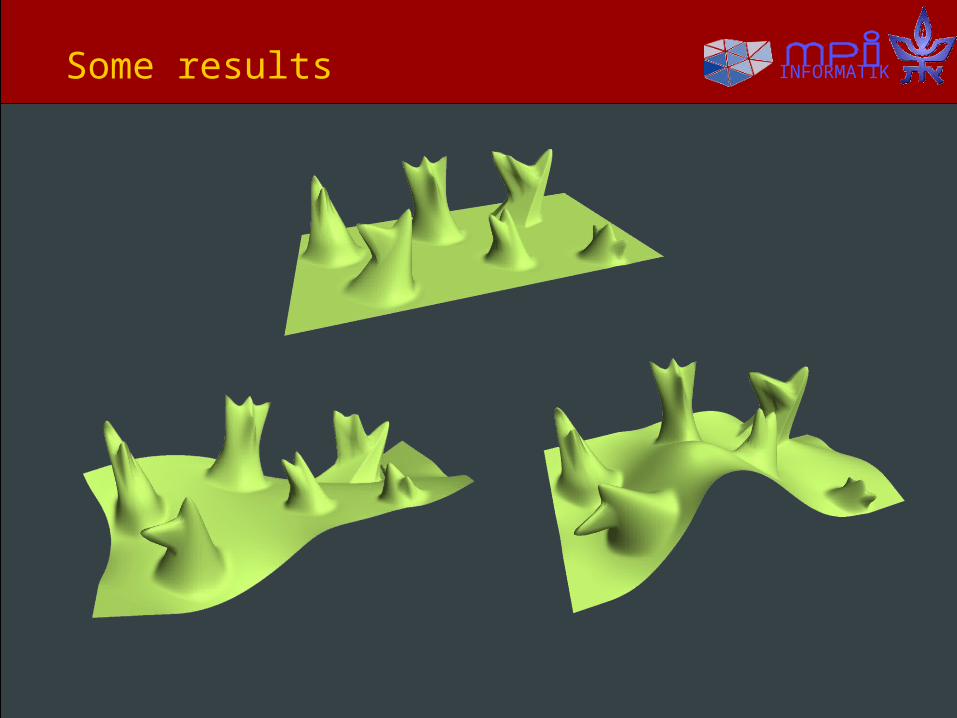
INFORMATIKSome results

INFORMATIKSome results
INFORMATIKSome results

INFORMATIKSome results

INFORMATIKSome results
Video...

INFORMATIKDetail transfer and mixing
“Peel“ the coating of one surface and transfer to another

INFORMATIKDetail transfer and mixing
Correspondence:
– Parameterization onto a common domain and elastic warp to align the features, if needed
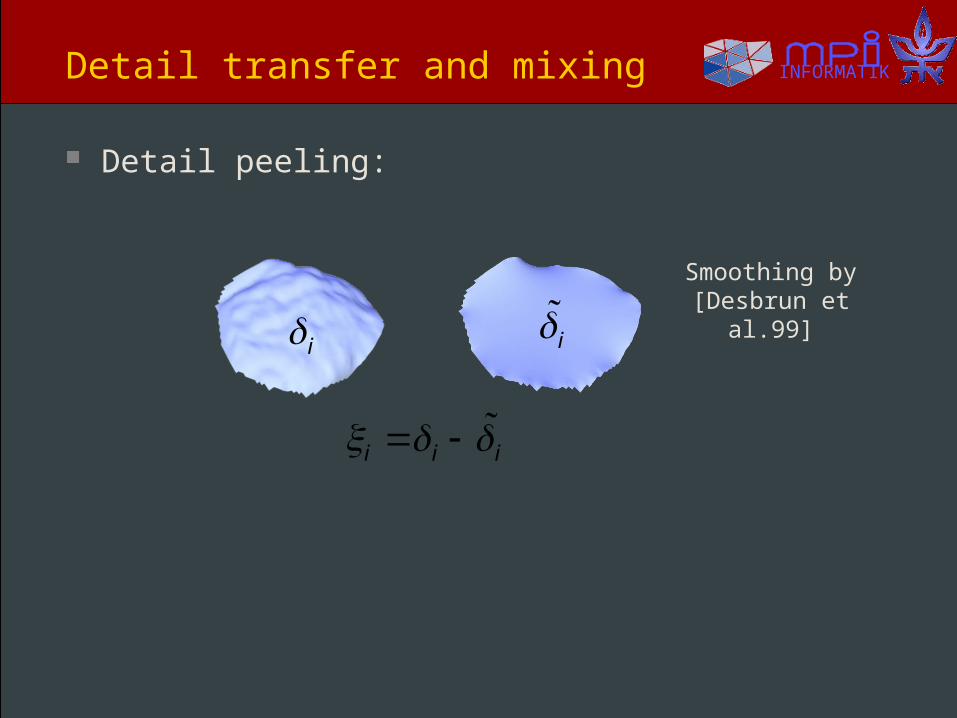
INFORMATIKDetail transfer and mixing
Detail peeling:
i i i
i iSmoothing by
[Desbrun et al.99]
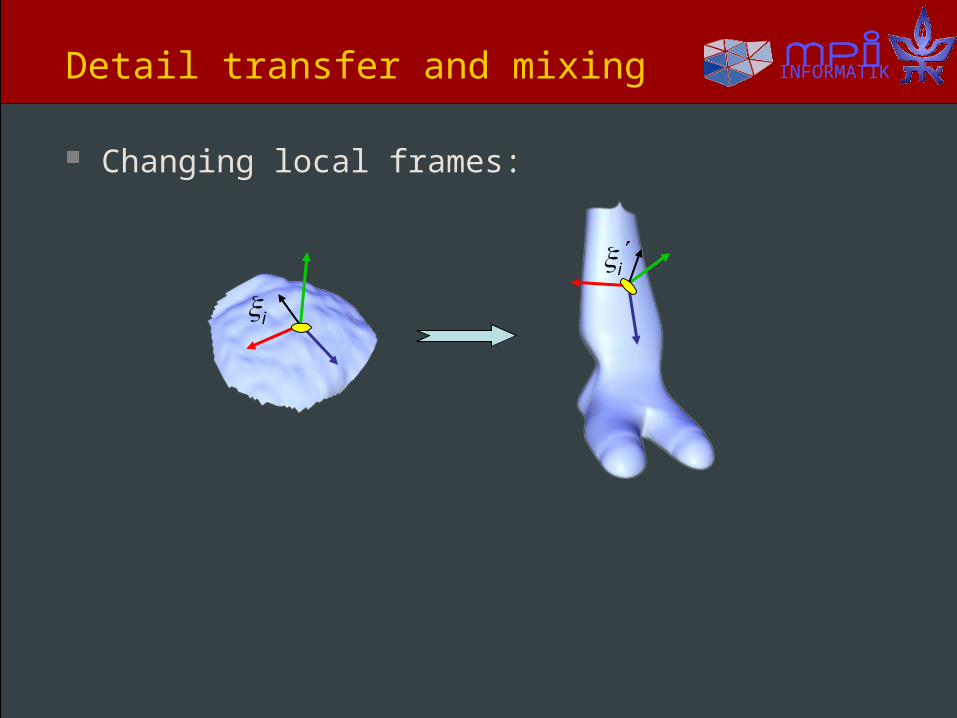
INFORMATIKDetail transfer and mixing
Changing local frames:
ii

INFORMATIKDetail transfer and mixing
Reconstruction of target surface from :
target i i
target

INFORMATIKExamples

INFORMATIKExamples

INFORMATIKMixing Laplacians
Taking weighted average of i and ‘i

INFORMATIKMesh transplanting
The user defines– Part to transplant– Where to transplant– Spatial orientation and scale
Topological stitching Geometrical stitching via Laplacian mixing
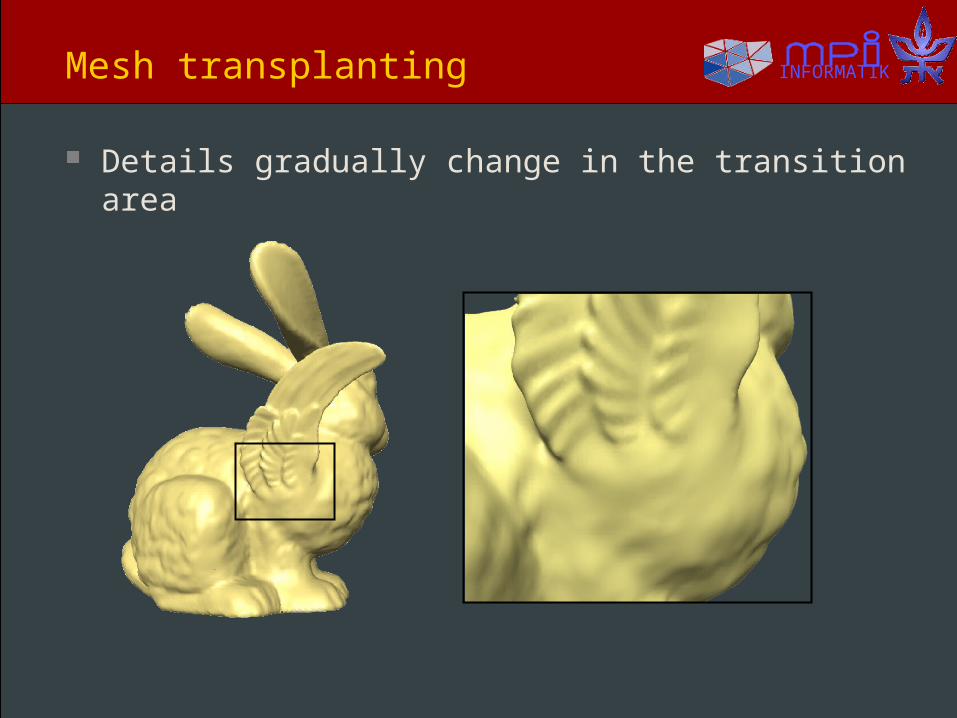
INFORMATIKMesh transplanting
Details gradually change in the transition area

INFORMATIKMesh transplanting
Details gradually change in the transition area

INFORMATIKConclusions
Differential coordinates are useful for applications that need to preserve local details
Reconstruction by linear least-squares – smoothly distributes the error across the domain
Linearization of 3D rotations was needed in order to solve for optimal local transformations – can we do better?

INFORMATIKAcknowledgments
German Israel Foundation (GIF) Israel Science Foundation (founded by the Israel
Academy of Sciences and Humanities) Israeli Ministry of Science
Bunny, Dragon, Feline courtesy of Stanford University Octopus courtesy of Mark Pauly

INFORMATIK
Thank you!

INFORMATIKGradual transition