interferometric synthetic aperture radar - an … · an introduction for users of insar data ... in...
TRANSCRIPT

INTERFEROMETRIC SYNTHETIC
APERTURE RADAR
An Introduction for Users of InSAR
Data
Page | 2
Table of Contents
An Introduction for Users of InSAR Data ...................................................................................... 5
1. Background .......................................................................................................................... 5
2. Basics of Synthetic Aperture Radar (SAR) .......................................................................... 5
2.1 Satellites ................................................................................................................... 5
2.2 SAR Sensors ............................................................................................................. 7
2.3 SAR Image Acquisition ............................................................................................ 7
2.4 Radar Frequencies and Viewing Geometry .............................................................. 8
2.5 Signal Properties ....................................................................................................... 9
2.6 Satellite Orbits and Geometrical Distortions .......................................................... 11
2.7 Resolution ............................................................................................................... 13
3. Basics of InSAR ................................................................................................................. 14
3.1 Interferometry ......................................................................................................... 14
3.2 Interferograms ........................................................................................................ 15
3.3 Contributors to Signal Phase .................................................................................. 16
3.4 Coherence ............................................................................................................... 17
4. Differential InSAR (DInSAR) ............................................................................................ 18
5 Interferogram Stacking ....................................................................................................... 19
6. Persistent Scatterer Techniques .......................................................................................... 20
6.1 General Concept ..................................................................................................... 20
6.2 Permanent Scatterers .............................................................................................. 20
6.3 Calculating Displacement ....................................................................................... 21
6.4 Precision ................................................................................................................. 22
6.5 Validation of PS Data ............................................................................................. 23
6.6 Data Output and Presentation ................................................................................. 24
7. SqueeSAR .......................................................................................................................... 25
8. Artificial Reflectors (AR) ................................................................................................... 27
9. Strengths and Weaknesses of PS Analyses ........................................................................ 28
10. Synergistic Use of PS and GPS ........................................................................................ 29
APPENDIX.................................................................................................................................... 31
GLOSSARY ................................................................................................................................... 32
PROCESS MAP ............................................................................................................................. 34

Page | 3
Table of Figures
Figure 1 Satellite Radar Systems available now and into the future. ........................................... 6
Figure 2: Illustration of the relationship between the orbit path of the satellite and true North –
South. It varies from satellite to satellite but is generally around 10° (see Section 2.6 for
definition of ascending and descending orbits). ........................................................................... 6
Figure 3: Schematic showing how a satellite acquires a strip map of the earth’s surface. ........... 8
Figure 4: Schematic showing the orientation of signal launch toward the earth’s surface........... 8
Figure 5(a-b): Images showing the effect of multi image reflectivity (MIR). ............................ 10
Figure 6: Motion measured by the sensor for different directions of terrain-motion. Red arrows
represent the vector of terrain motion while blue arrows represent the LOS motion measured by
the radar system. ......................................................................................................................... 11
Figure 7: Illustration of the method for obtaining actual motion by combining ascending and
descending orbit information. In the case of vertical ground displacements (left image) the
motion components on the ascending and descending directions are both negative (moving
away from the sensor) while in the case of a horizontal (E-W) motion (right image) one vector
is positive (moving toward the sensor) while the other is negative. ........................................... 11
Figure 8: Schematic illustration showing how features on the landscape are projected on to the
line of sight of the satellite radar beam. ...................................................................................... 12
Figure 9: An amplitude image of Mt. Vesuvius, in SAR coordinates. The North direction is to
the left of the image (the satellite flies from left to right in a descending orbit). The coast line
along the Tyrrhenian Sea is clearly visible (water appears as black). Urban areas can be
identified as bright spots on the image created by the strong amplitude responses from
reflections off buildings. The eastern slopes of the volcano (at the top of the image) are
‘compressed’ compared to those on the western slopes (foreshortening). ................................. 12
Figure 10: Schematic illustration showing how mountainous terrain can create noise through
layover and shadow effects......................................................................................................... 13
Figure 11: A schematic showing the relationship between ground displacement and signal
phase shift. The numerical value of the wavelength is that of ERS. .......................................... 15
Figure 12: An interferogram generated from two radar images one of which was acquired
before the L’Aquila earthquake (February 2009) and the other shortly after the event (April
2009). The fringes indicate coherence whereby displacement can be calculated in the
corresponding areas. The areas with a spotty appearance are areas where decorrelation noise
has occurred. Phase values range from –π to +π. ....................................................................... 16
Figure 13. The visual display of results of a PSInSAR™ analysis of Lake Presenzano and its
surrounding area. ........................................................................................................................ 21

Page | 4
Figure 14: A typical time series showing linear and non-linear patterns of movement. ............ 22
Figure 15: Typical values of precision (1 sigma) for a point less than 1km from the reference
point (P0), considering a multi-year dataset of radar images. ..................................................... 23
Figure 16: Comparison of PSInSAR™ with GPS data. The x, y and z components of GPS
measurements have been resolved to the equivalent LOS of the satellite data. ......................... 23
Figure 17: Optical leveling. The blue line is an optical benchmark correction curve; the red dots
represent InSAR readings at the same location. ......................................................................... 24
Figure 18: Thermal Dilation. Buildings move in response to changes in temperature and
software is available to model such movement. The black line represents the results of a
thermal dilation model while the red triangles correspond to InSAR readings on the same
building, measured over the same time period. .......................................................................... 24
Figure 19(a-c): These images are screen-grabs from a GIS showing how distant and close-up
views of deformation phenomena can be observed using GIS platforms. .................................. 25
Figure 20(a-d): Artificial reflectors. ........................................................................................... 28
Figure 21: The Right Bank Landslide, Lake Sarez, Tajikistan showing the results of analyses of
movement using both GPS and PSInSAR™ technologies. ........................................................ 30
Table of Tables
Table 1: Nominal Resolution Cell Sizes of all Commercial Radar Satellites. Numbers in
brackets, for COSMO-SkyMed data, refer to the use of 2 satellites of the constellation,
operating in tandem. ................................................................................................................... 14
Table 2: Summary of strengths and weaknesses of InSAR ........................................................ 28
Table 3: Comparison of PS and GPS technologies .................................................................... 29

Page | 5
INTERFEROMETRIC SYNTHETIC APERTURE RADAR
An Introduction for Users of InSAR Data
1. Background
This document is a general overview of the concepts related to the measurement of surface
deformation phenomena using Synthetic Aperture Radar Interferometry (InSAR). The text has
been written in layman terms, avoiding radar specialist jargon. Should the reader be interested
in a more detailed explanation, he/she can refer to the suggested supplementary reading,
appended to this document.
The two main fields of application of InSAR data are: a) reconstruction of digital elevation
models of large areas; b) detection and monitoring of surface deformation phenomena and, in
general c) measurement of displacement rates of objects on the ground. In this document, the
focus will be on the latter topic.
The first theoretical study on this subject dates back to the 1980s (Gabriel et al., 1989) when the
first proof of concept using SEASAT data was published by the Jet Propulsion Laboratory’s
radar group. With the launch of the European Space Agency’s (ESA) ERS-1 satellite, in July
1991, and ERS-2, in April 1995, an ever-growing set of interferometric data became available
to many research groups. While more and more InSAR results were generated, the presence of
atmospheric artifacts became more and more evident and dampened, somewhat, the
enthusiasm. Research efforts were then devoted to different strategies for the combination of
several interferograms or the fusion of InSAR data with prior information, in order to reduce
the impact of the atmospheric disturbances.
Among several research groups pursuing this challenge was the Department of Electrical
Engineering of the Politecnico di Milano, in Italy. By 1999, the Institution had developed the
Permanent Scatterer Technique along with its proprietary PSInSAR™ algorithm. In March
2000, the Politecnico di Milano and the three inventors of the technology founded TRE, to
create a team specialized in InSAR data processing. Since that time, other organizations have
developed similar technologies, but TRE has still the largest team of engineers specifically
working on SAR interferometry.
2. Basics of Synthetic Aperture Radar (SAR)
2.1 Satellites
The family of satellites that carry, or will be carrying, SAR sensors for commercial applications
is illustrated in Figure 1. Other SAR-bearing satellites exist but are used exclusively for
military applications.

Page | 6
Figure 1 Satellite Radar Systems available now and into the future.
All satellites equipped with SAR sensors orbit the earth on a near-polar orbit at an altitude
ranging from 500 to 800 km above the earth’s surface, depending on the satellite platform
hosting the SAR sensor.
The angle between true north-south and the satellite orbit varies slightly, depending on the
satellite but, in general lies in the range of 10 degrees, as shown in Figure 2.
Ascending Orbit
Descending Orbit
Figure 2: Illustration of the relationship between the orbit path of the satellite and true North –
South. It varies from satellite to satellite but is generally around 10° (see Section 2.6 for definition of
ascending and descending orbits).

Page | 7
Data from different satellite sources can generally be purchased or ordered without limitation,
with the exception of data from the Japanese Space Agency (JAXA). Although ALOS-
PALSAR data can be purchased, JAXA selected the acquisition modes of the satellite for the
duration of its operating life (past and future), at the beginning of the mission, so the user
cannot select the radar acquisition mode most suitable for the application at hand.
Another important point to be considered is that the Italian COSMO-SkyMed constellation is a
joint military/civilian mission. Whenever a conflict arises between acquisition requests,
commercial projects have lower priority.
2.2 SAR Sensors
Because the illuminating source of radar is microwave energy, radar signals are unaffected by
darkness or clouds, in terms of visibility of the land surface. As will be discussed later, clouds
impact the accuracy of InSAR but do not obstruct the passage of the signal through the
medium. Therefore, SAR can function 24 hours per day, 365 days per year.
The sensors emit signals with a specific central frequency. In addition, radar systems are
associated with specific bands of the electromagnetic spectrum. Those commonly used in
InSAR applications are L-band (1-2 GHz, ~24 cm wavelength), C-band (5-6 GHz, ~6 cm
wavelength) and X-band (8-12 GHz, ~3 cm wavelength).
In 1992, with the launch of ERS-1, the first SAR satellite for commercial applications, the on-
board sensor offered but one acquisition mode, a single look angle, a single resolution cell size,
and a single signal wavelength. The only options available related to viewing geometry, i.e.
ascending or descending satellite tracks. Today, as Figure 1 indicates, the options have
proliferated with the increase in numbers of satellites, offering the end-user a wide choice of
look angle, repeat orbit cycle, resolution cell size, and signal wavelength. It is now possible to
design a monitoring program much better suited to an end-user’s needs than was possible 10
years ago.
2.3 SAR Image Acquisition
As the satellite circumnavigates the earth, it launches millions of radar signals toward the earth
along the radar beam’s line of sight (LOS), on a continuous basis. Following impact with the
earth’s surface, some of the signals are reflected away from the satellite, some are absorbed in
vegetation or other non-reflective materials and some reflect back to the satellite. Using the
signals reflected off the earth’s surface, also referred to as backscattered signals, processors on
board the satellite integrate the returning signals to form a strip map. Usually, the on board
memory capacity is limited so the satellite has to transmit the data to strategically located
ground stations. These stations then compile images which can be used for data analysis.
Figure 3 is a schematic showing the process of image acquisition by a satellite.

Figure 3: Schematic showing how a satellite acquires a strip map of the earth
2.4 Radar Frequencies and
Radar signals are transmitted in pulses
important frequencies that define its operations.
(PRF) is the rate at which those pulses are transmitted
in azimuth direction (i.e. the direction parallel to the satellite velocity)
(f0) defines the operating wavelength of the system and
penetration features, as well as the sensitivity of the system in interferometric applications
Finally, radar pulses backscattere
another frequency (fs) defining the
cell size, in the range direction
Figure 4: Schematic showing the orientation of signal launch toward the earth’s surface
: Schematic showing how a satellite acquires a strip map of the earth
Radar Frequencies and Viewing Geometry
transmitted in pulses (Figure 4). In any SAR system, there are three
important frequencies that define its operations. The so-called Pulse Repetition F
is the rate at which those pulses are transmitted and defines the resolution of the system
in azimuth direction (i.e. the direction parallel to the satellite velocity), the
operating wavelength of the system and characterizes its propagation and
, as well as the sensitivity of the system in interferometric applications
adar pulses backscattered by the Earth surface are sampled by the radar system at
defining the nominal pixel size, sometimes referred to as the resolution
cell size, in the range direction, related to the sensor-to-target distance.
: Schematic showing the orientation of signal launch toward the earth’s surface
Page | 8
: Schematic showing how a satellite acquires a strip map of the earth’s surface.
In any SAR system, there are three
called Pulse Repetition Frequency
and defines the resolution of the system
the central frequency
izes its propagation and
, as well as the sensitivity of the system in interferometric applications.
sampled by the radar system at
pixel size, sometimes referred to as the resolution
: Schematic showing the orientation of signal launch toward the earth’s surface.
Page | 9
Satellite sensors are mounted on their platforms with the direction of transmission at 90° to the
flight direction. The earlier satellites (ERS-1, ERS-2, Radarsat-1 and Envisat) were all right-
looking satellites, meaning that microwave beam transmits and receives on the right side only
of the satellite, relative to its orbital path, i.e. the system cannot rotate. Newer satellites
(Radarsat-2, TerraSAR-X and COSMO-SkyMed) have both right-looking and left-looking
capabilities, thus they can ‘look’ to the right or the left of the craft, but not both directions
simultaneously.
The angle at which the sensor is pointed toward the earth’s surface is referred to as the off-
nadir, or look, angle. The off-nadir angle of the ERS satellites was fixed at about 23°, but all
subsequent satellites were fitted with the means to vary the viewing angle of the sensors,
ranging from values of 20 to 50 degrees. This ability to vary the off-nadir angle is important in
that it is possible to adjust for hilly or mountainous terrain – potential impediments to InSAR –
if the relationship between viewing geometry and terrain slope is not optimal.
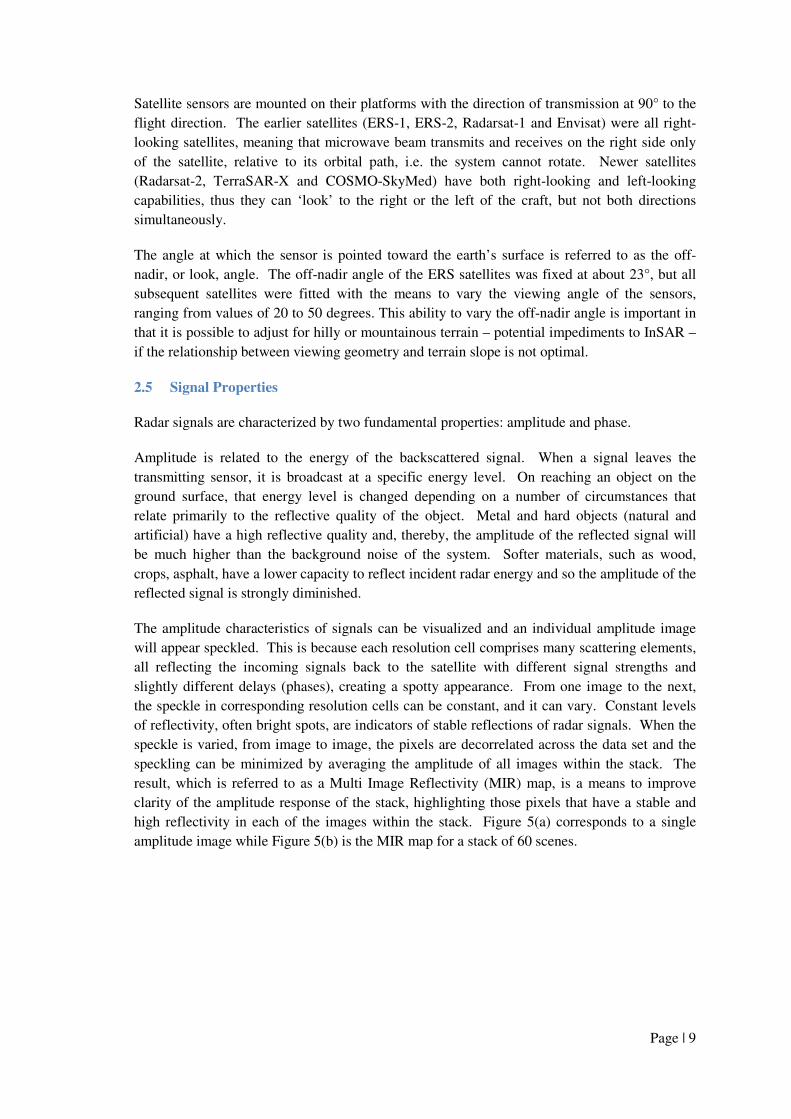
2.5 Signal Properties
Radar signals are characterized by two fundamental properties: amplitude and phase.
Amplitude is related to the energy of the backscattered signal. When a signal leaves the
transmitting sensor, it is broadcast at a specific energy level. On reaching an object on the
ground surface, that energy level is changed depending on a number of circumstances that
relate primarily to the reflective quality of the object. Metal and hard objects (natural and
artificial) have a high reflective quality and, thereby, the amplitude of the reflected signal will
be much higher than the background noise of the system. Softer materials, such as wood,
crops, asphalt, have a lower capacity to reflect incident radar energy and so the amplitude of the
reflected signal is strongly diminished.
The amplitude characteristics of signals can be visualized and an individual amplitude image
will appear speckled. This is because each resolution cell comprises many scattering elements,
all reflecting the incoming signals back to the satellite with different signal strengths and
slightly different delays (phases), creating a spotty appearance. From one image to the next,
the speckle in corresponding resolution cells can be constant, and it can vary. Constant levels
of reflectivity, often bright spots, are indicators of stable reflections of radar signals. When the
speckle is varied, from image to image, the pixels are decorrelated across the data set and the
speckling can be minimized by averaging the amplitude of all images within the stack. The
result, which is referred to as a Multi Image Reflectivity (MIR) map, is a means to improve
clarity of the amplitude response of the stack, highlighting those pixels that have a stable and
high reflectivity in each of the images within the stack. Figure 5(a) corresponds to a single
amplitude image while Figure 5(b) is the MIR map for a stack of 60 scenes.

Page | 10
Figure 5(a) An ERS-2 SAR amplitude image of Linate Airport in Milan (Italy): the speckle effect on
the fields surrounding the airport is clearly visible.
Figure 5(b): An MIR map of the same area at Linate Airport: the speckle effect on the fields
surrounding the airport has disappeared.
Figure 5(a-b): Images showing the effect of multi image reflectivity (MIR).
Apart from amplitude values, radar systems record phase values, the key element in any
interferometric measurement, since it is related to the sensor-to-target distance. As has already
been mentioned, radar signals are characterized by a certain frequency of operation and, for
interferometric applications, they can be thought of as sinusoidal waves: one complete cycle
(from –π to +π) corresponding to the wavelength. It is this specific property of the radar signal,
and the system’s ability to record both amplitude and phase information for each image pixel,
that are used in estimating displacement.
A signal’s phase can be affected by changes in the atmosphere as it travels from the satellite to
the earth and then back again. In the atmosphere, there are always layers of moisture (cloud,
fog, rain etc.) through which a signal must pass. In arid areas, these layers are few compared to
tropical and temperate areas. As a signal encounters a moisture-bearing layer in the atmosphere,
the propagating speed of the signal changes. As a result, errors are introduced into the phase
values recorded by the receiving sensor, on the satellite. Since wavelength and signal phase
have a simple and direct correlation, any change in wavelength corresponds to a change in the
phase of a signal. As will be explained later in Section 3, this is an important issue in
measuring ground movement because there is also a direct relationship between ground
displacement and signal phase.

Page | 11
2.6 Satellite Orbits and Geometrical Distortions
The circumpolar orbits of all satellites mean that, for part of their trajectory, they are travelling
from the North toward the South. This direction is referred to as Descending. Conversely,
when the satellite is traveling from the South toward the North, it is said to be in an Ascending
orbit. By acquiring imagery during both ascending and descending orbits, it is possible to view
a point on the earth’s surface from two different perspectives, from the East or from the West.
This is an important element of measuring vertical and horizontal motion.
What is actually measured in interferometric applications is the projection of a target’s motion
onto the LOS. If the motion direction is close to the angle of the LOS then the measured and
actual motions will be similar. However, the LOS motion can often differ noticeably from the
real value of motion, especially in cases where the ground motion is not vertical (Figure 6).
Figure 6: Motion measured by the sensor for different directions of terrain-motion. Red arrows
represent the vector of terrain motion while blue arrows represent the LOS motion measured by the
radar system.
Measuring true vertical and horizontal components of motion is difficult with a single geometry
acquisition, unless a priori information is available on the true vector of movement (not a
common situation!). However, by using ascending and descending data together, it is possible
to combine the measured motion information to obtain an accurate estimate of the actual
vertical motion and of the East-West component of the motion (Figure 7).
Figure 7: Illustration of the method for obtaining actual motion by combining ascending and
descending orbit information. In the case of vertical ground displacements (left image) the motion
components on the ascending and descending directions are both negative (moving away from the
sensor) while in the case of a horizontal (E-W) motion (right image) one vector is positive (moving
toward the sensor) while the other is negative.

Page | 12
Figure 8 illustrates how features on an undulating landscape will be viewed by the satellite. In
pixels (resolution cells) 1 and 2, the equilateral triangles on the landscape appear slightly
distorted in the LOS (range, sometimes referred to as slant-range). As the signal reaches pixel
3, there is a marked change in ground slope and many more triangles appear in the pixel, even
though they are all of the same size. The effect is to compress these triangles in the LOS,
referred to as foreshortening. When the radar progresses to pixels 4 and 5, at which point the
ground slope and LOS are parallel, the triangles now appear stretched at their base. This
distortion in the appearance of land use can be seen in Figure 9, which is an amplitude image of
Mount Vesuvius, in Italy, viewed in SAR coordinates (range and azimuth, corresponding to the
vertical and horizontal axis, respectively).
Figure 8: Schematic illustration showing how features on the landscape are projected on to the line of
sight of the satellite radar beam.
Figure 9: An amplitude image of Mt. Vesuvius, in SAR coordinates. The North direction is to the left
of the image (the satellite flies from left to right in a descending orbit). The coast line along the
Tyrrhenian Sea is clearly visible (water appears as black). Urban areas can be identified as bright
spots on the image created by the strong amplitude responses from reflections off buildings. The
eastern slopes of the volcano (at the top of the image) are ‘compressed’ compared to those on the
western slopes (foreshortening).
Ground rangeGround range
Slant-range
Slant-range
TopographyTopography
Sla
nt-r
ange
Sla
nt-r
ange
reso
lution
reso
luti
on
1 2 3 4 5
Off-Nadir
Azimuth
Ran
ge

Page | 13
In hilly or mountainous terrain, it sometimes occurs that the projection of steep slopes on to the
LOS is reversed. Figure 10 illustrates how this phenomenon manifests itself in radar imagery.
In pixel 1, the radar “sees” the object A normally. However, when the radar reaches pixels 2, 3
and 4, the objects E, F, and G are present in the same pixels as objects B, C, and D, the latter
being masked by the former. This phenomenon is referred to as “layover” and generates noise.
In an amplitude image, it appears as a bright white layer and, in Figure 9 , it can be observed
around the caldera of Mount Vesuvius. As the radar progresses from pixels 4 to 7, the slope of
the ground is greater than that of the LOS and, so, the area in question cannot be “seen” by the
sensor and, in an amplitude image, appears as a black area, as can also be seen in Figure 9.
This effect is referred to as “shadow”.
Figure 10: Schematic illustration showing how mountainous terrain can create noise through layover
and shadow effects.
2.7 Resolution
To most end-users of interferometric data the terms resolution and pixel are usually
synonymous. They are different, however, although similar in numerical value. The
explanation of the difference is rooted in signal processing theory and is beyond the scope of
this User Manual. Accordingly, the resolution in the range and azimuth directions are usually
referred to in nominal value terms and, for the various satellites that carry SAR sensors, these
values are shown in Table 1.

Page | 14
Satellite Band Acquisition Mode Nominal Pixel
Dimension:
ground range x
azimuth (m)
Repeat Cycle
(day)
ERS-1 & ERS-2 C Standard Beam 20x4 35
Envisat C Standard Beam 20x4 35
Radarsat-1 C Standard Beam 20x5 24
Radarsat-1 C Fine Beam 10x5 24
Radarsat-2 C Standard Beam 20x5 24
Radarsat-2 C Fine Beam 10x5 24
Radarsat-2 C Ultra Fine Beam 3x3 24
TerraSAR-X X Standard 3x3 11
TerraSAR-X X Spotlight 1.5x1.5 11
Cosmo SkyMed X Standard 3x3 16 (8)
Cosmo SkyMed X Spotlight 1.5x1.5 16 (8)
ALOS PALSAR L Fine Beam 10x5 46
Table 1: Nominal Resolution Cell Sizes of all Commercial Radar Satellites. Numbers in brackets, for
COSMO-SkyMed data, refer to the use of 2 satellites of the constellation, operating in tandem.
The values in Table 1 relate to a land surface that is flat and horizontal. In reality, much of the
earth’s landscape contains land that is irregular in surface profile (hills, valleys etc.) and these
features immediately impact the actual dimensions of the resolution cell.
3. Basics of InSAR
3.1 Interferometry
Interferometric Synthetic Aperture Radar (InSAR), also referred to as SAR Interferometry, is
the measurement of signal phase change, or interference, over time. When a point on the
ground moves, the distance between the sensor and the point on the ground also changes and so
the phase value recorded by a SAR sensor flying along a fixed orbit will be affected, too.
Figure 11 shows the relationship between that ground movement and the corresponding shift in
signal phase between two SAR signals acquired over the same area.

Figure 11: A schematic showing the relationship between ground displacement and signal phase
shift. The numerical value of the wavelength is that of
The change in signal phase (
Where λ is the wavelength
atmospheric conditions at the time of the two
displacement of a radar target along the satellite line of sight creates
signal that can be detected by comparing the phase values of two SAR images acquired at
different times.
Apart from decorrelation effects, to be discussed in the next sections, SAR i
only be applied in the following circumstances:
• Images have to be acquired by the same satellite using the same acquisition mode and
properties (beam,
• Images have to be acquired
• The baseline separ
be no more than
in use); the baseline being the
3.2 Interferograms
An interferogram is the difference of the phase values corresponding
digital representation of change in surface characterization. It is
ranging from –π to +π (since they correspond to phase va
map – the easiest way to observe whether or not motion has occurred
schematic showing the relationship between ground displacement and signal phase
. The numerical value of the wavelength is that of ERS.
he change in signal phase (∆φ) can be expressed in the form of the following simple equation:
αλ
πϕ +∆=∆ R
4
is the wavelength, ∆R is the displacement and α is a phase shift due to different
atmospheric conditions at the time of the two radar acquisitions. As a consequence,
displacement of a radar target along the satellite line of sight creates a phase shift in the radar
signal that can be detected by comparing the phase values of two SAR images acquired at
Apart from decorrelation effects, to be discussed in the next sections, SAR i
following circumstances:
Images have to be acquired by the same satellite using the same acquisition mode and
properties (beam, polarization, off-nadir angle, etc);
Images have to be acquired with the satellite in the same nominal
The baseline separation between the master scene and any of the slave scenes must
be no more than the “critical baseline” (a parameter that varies with
; the baseline being the distance between the satellite paths
e difference of the phase values corresponding to a certain area, i.e. it is
digital representation of change in surface characterization. It is a matrix of numerical values
π (since they correspond to phase variations) and it can be
the easiest way to observe whether or not motion has occurred over a certain area
Page | 15
schematic showing the relationship between ground displacement and signal phase
can be expressed in the form of the following simple equation:
is a phase shift due to different
As a consequence, any
a phase shift in the radar
signal that can be detected by comparing the phase values of two SAR images acquired at
Apart from decorrelation effects, to be discussed in the next sections, SAR interferometry can
Images have to be acquired by the same satellite using the same acquisition mode and
nominal orbit;
ation between the master scene and any of the slave scenes must
that varies with the SAR sensor
s.
to a certain area, i.e. it is a
matrix of numerical values
can be converted to a
over a certain area.

Page | 16
Figure 12 is an interferogram of the L’Aquila earthquake that occurred in Italy, in April 2009.
The colored bands, referred to as fringes, indicate areas where movement can be measured.
The highly speckled areas indicate where some form of decorrelation arose. Here the noise
level (mostly due to vegetation) prevents the application of InSAR and no useful information
can be extracted. Data were acquired by the ENVISAT satellite (see Table 1 for the properties
of this satellite) for which one phase cycle corresponds to 28 mm of ground deformation along
the line of sight (neglecting atmospheric effects).
The analysis of a SAR interferogram is not a trivial task to perform for non specialists. Apart
from noise and decorrelation effects, interferometric phase values are a blend of different signal
contributions, as will be discussed in the next section.
Figure 12: An interferogram generated from two radar images one of which was acquired before the
L’Aquila earthquake (February 2009) and the other shortly after the event (April 2009). The fringes
indicate coherence whereby displacement can be calculated in the corresponding areas. The areas
with a spotty appearance are areas where decorrelation noise has occurred. Phase values range from
–π to +π.
3.3 Contributors to Signal Phase
Interferometric phase (∆φ) is impacted by four contributions: topographic distortions arising
from slightly different viewing angles of the two satellite passes (t), atmospheric effects (α)
arising from the wavelength distortion that occurs when signals enter and leave a moisture-
bearing layer, any range displacement of the radar target (∆R), and noise; range being the
distance between the sensor and the target. More precisely:
noisetR +++∆=∆ αλ
πϕ
4
It is then clear that the difficulties related to the estimation of surface deformation signals from
a single SAR interferogram are essentially due to the presence of decorrelation effects

Page | 17
(contributing to the noise level), the impact of local topography on phase values and the
presence of atmospheric phase components superimposed on the signal of interest. In Figure
12, most of the fringes visible in the interferogram are due to co-seismic deformation induced
by the earthquake: in fact, the impact of the local topography has been removed, and
atmospheric disturbances are not evident in this image.
3.4 Coherence
Interferometric fringes can only be observed where image coherence prevails. When an area on
the ground appears to have the same surface characterization in all images under analysis, then
the images are said to be coherent. If the land surface is disturbed between two acquisitions
(e.g. an agricultural field has been ploughed, tree leaves have moved positions, etc.), those sub-
areas will decorrelate in an InSAR analysis, resulting in noise and no information being
obtainable. Coherence and correlation have the same meaning in this context. The term ‘noise’
is frequently used in this context and it is another word for non-coherence, or decorrelation.
The fringes visible in Figure 12 reveal areas with high coherence while the speckled areas
represent very low coherence and noise.
The coherence of an interferogram is affected by several factors, including:
• Topographic slope angle and orientation (steep slopes lead to low coherence)
• Terrain properties
• The time between image acquisitions (longer time intervals lead to lower coherence)
• The distance between the satellite tracks during the first and second acquisitions, also
referred to as the baseline (larger baselines lead to lower coherence)
Typical sources of decorrelation are:
• Vegetation. Leaves grow and die and they also move. From one scene to the next,
these changes are sufficient to change the appearance of the surface characterization.
This is a particular problem for X-band and C-band sensors. L-band sensors can
overcome this limitation in many situations, because their significantly longer
wavelength is able to ‘see’ through foliage and reflect off objects beneath the
vegetation and back through the foliage.
• Construction. At a construction site, the appearance of the land surface is changing
constantly. This is a problem that is common to X-band, C-band, and L-band sensors.
• Erosion. Whether prompted by rain, snowmelt or wind, surface erosion will also
change the surface characterization of land and, thereby, can decorrelate those areas
where erosion is prevalent.
• Rapid Movement. Landslides and earthquakes precipitate rapid motion of an area of
land. Quite often, the rapid motion causes destruction and, with it, a total change in the
land surface’s appearance. With earthquakes, it is sometimes possible for rapid motion
to occur without changes to surface characterization and, in those situations,
interferometry can be successful. If the total movement occurring between successive
image acquisitions exceeds one-half of the signal’s wavelength, decorrelation is likely
to occur.

Page | 18
Coherence is measured by an index which ranges from 0 to 1. When an area is completely
coherent, it will have a coherence value of 1. Correspondingly, if an area completely
decorrelates, its coherence index will be 0. In general, interferometry is successful and accurate
deformation is measurable when the coherence index lies between 0.5 and 1.0. Interferometry
can still produce meaningful results with coherence levels below 0.5 but as the index gets
lower, so the results will display increasing levels of noise and may show erratic deformation
patterns, from scene to scene, although movement trends are visible and generally reliable.
Wherever fringes occur, it is possible to calculate deformation by calculating the number of
fringes and multiplying them by half of the wavelength. In the case of L’Aquila, C-band SAR
was used and, therefore, each fringe should be multiplied by 28 mm (one-half of the
wavelength) to calculate the total apparent displacement.
4. Differential InSAR (DInSAR)
When a pair of images is subjected to interferometric analysis with a view to identifying
movement and, thereafter, quantifying that movement, the process is referred to as Differential
InSAR. Since change detection is now the goal, topographic effects are compensated for by
using a Digital Elevation Model (DEM) of the area of interest, creating what is referred to as a
differential interferogram (the word “differential” here refers to the subtraction of the
topographic phase contribution from the SAR interferogram). The equation in section 3.3, can
then be represented as follows:
noiseR +++∆=∆ εαλ
πϕ
4
Where ε is the contribution to phase arising from possible errors in the DEM that was used to
remove the topographic effects.
Whenever the noise is low (i.e. decorrelation effects are negligible) and the phase contribution
due to the local topography is accurately compensated for (i.e. ε is negligible as well), the
interferometric phase can be simplified to the following equation:
αλ
πϕ +∆=∆ R
4
Where ∆φ is the differential interferometric phase, ∆R is the incremental distance the signal
travels from the sensor to the ground and back, and α is the atmospheric contribution to phase
shift.
Once the differential interferogram has been prepared, a deformation map can be created for all
areas that are coherent.
In the mid-90’s, after extensive application of the DInSAR technology, the atmospheric
contribution to phase shift was found to be significant, particularly in tropical and temperate
areas. Unfortunately, there is no method for removing the α component, so users have to be
aware of its effects. Thus, DInSAR should only be used on the understanding that deformation
measurements are prone to errors arising from atmospheric circumstances. However, DInSAR,
Page | 19
while not the tool for accurate displacement measurements, still has a use in identifying
footprints of progressing movement. It can only measure total displacement between two
points in time. Accordingly, it cannot distinguish between linear and non-linear motion.
5 Interferogram Stacking
Following the realization that atmospheric effects on signal phase values were significant, a
method emerged in the late 1990’s that sought to mitigate this effect by ‘averaging’ data within
multiple interferograms. This process was referred to as Interferogram Stacking.
By averaging the data in a stack of interferograms, the signal to noise ratio (SNR) values are
enhanced and, theoretically, it is easier to extract information on displacement over longer
periods of time than are realistic for single interferogram DInSAR.
However, for this process to work, certain assumptions are made:
• Although different versions of this technique exist, the displacement rate of the area of
interest is assumed to be constant in time. In reality, such an assumption has limited
validity. Multiple interferograms usually describe ground movement over time lines
measured in years. Apart from tectonic deformation, linear movement over such time
periods is not common.
• The data are heavily filtered, spatially, before the stacking procedure is implemented.
Not only does this reduce the resolution but also prompts the loss of potentially
valuable data contained in ‘isolated’ pixels with high SNR values, and it also smoothes
out abrupt changes in displacement, e.g. seismic faults.
• The atmospheric contribution to signal phase is not estimated. Thereby, no assessment
is possible on the quality of the filtering procedure. Atmospheric disturbances are
characterized by specific statistical features, and the separation of motion and
atmospheric phase components should take into account the peculiarities of the "noise"
to be filtered out.
• Typically, stacking procedures are only applied using interferograms with an orbital
baseline less than 300m, because of the spatial filtering. As a result, substantial
quantities of information that can be found from within interferograms whose baselines
are as high as 1300m are overlooked, the latter being a common baseline upper limit
for PSI technologies.
While interferogram stacking provides the user with better information than can be obtained
from single differential interferograms (DInSAR) the approach is far from optimal, particularly
because deformation cannot be considered constant in time. Moreover, for the estimation of
atmospheric noise, the procedure usually adopted to produce a weighted average, i.e. to assign
different "importance" to different interferograms, is based on visual inspection of multiple
interferograms.
Finally, as already mentioned, the estimation of errors is usually not performed.
Page | 20
6. Persistent Scatterer Techniques
6.1 General Concept
Persistent Scatterer Interferometry (PSI) is the collective term used within the InSAR
community to distinguish between single interferogram DInSAR and the second generation of
InSAR technologies, of which there are but a few. The first of these to appear, in 1999, was the
PS Technique™, the base algorithm of which is PSInSAR™. It is proprietary to the
Politecnico di Milano (Polimi) and licensed exclusively to TRE for commercial development.
TRE has no specific knowledge of the competing algorithms; however, in concept they are all
likely to be similar in approach, although probably different in their analytical capability. The
following description of PSI technology is based on the PSInSAR™ model.
All PSI technologies are advanced forms of DInSAR. In other words, the interferogram is at
the core of PSI. The fundamental difference is that PSI technologies develop multiple
interferograms from a stack of radar images. As a minimum, 15 radar scenes are usually
required for PSI methods, including PSInSAR™, even though there are circumstances when an
analysis can be conducted with fewer images (typically in urban areas). However, it should be
noted that the more there are radar scenes available, the more accurate will be the results of
PSInSAR™, and the same holds true for other PSI methods.
The main driver for the development of PSInSAR™ was the need to overcome the errors
introduced into signal phase values by atmospheric artifacts. By examining multiple images,
usually a minimum of 15 scenes, many interferograms (in this case 14 interferograms) are
generated by selecting one of the scenes as a master to which the other 14 scenes become
slaves.
The process by which removal of atmospheric effects is achieved involves searching the
imagery and interferograms for pixels that display stable amplitude and coherent phase
throughout every image of the data set. They are referred to as Permanent - or Persistent –
Scatterers. Thus a sparse grid of point-like targets characterized by high signal to noise ratios
(SNR) is identified across an area of interest on which the atmospheric correction procedure
can be performed. Once these errors are removed, a history of motion can be created for each
target.
Having removed the atmospheric artifacts, the interferometric data that remain are
displacement values (resolved along the satellite LOS) plus noise, dependent on the quality
(SNR) of the reflector.
6.2 Permanent Scatterers
A Permanent Scatterer (PS) is defined as a radar target, within a resolution cell, that displays
stable amplitude properties and coherent signal phase, throughout all of the images within a
data stack.
Sometimes a target may behave with a stable amplitude characteristic but its phase is erratic, or
non-coherent. Further, some targets behave as if they are PS but only within a portion of the
images within the data stack. Such targets are not PS.

Page | 21
Objects that make good PS are varied and can be natural or man-made. Among the natural
forms are: rock outcrops, hard un-vegetated earth surfaces, and boulders. Among the man-
made objects are: buildings, street lights, transmission towers, bridge parapets, above-ground
pipelines, appurtenances on dams and roof structures, and any rectilinear structure that can
create a dihedral signal reflection back to the satellite. Figure 13 shows the results of a
PSInSAR™ analysis of a man-made reservoir, in Italy. The colored dots represent the location
of a PS, the color reflecting the displacement rate measured at that point.
Figure 13. The visual display of results of a PSInSAR™ analysis of Lake Presenzano and its
surrounding area.
6.3 Calculating Displacement
All measurements are made in the LOS of the satellite’s radar beam and are relative to a point
that is pre-selected as being stable and not moving (P0). The selection of the reference point is
best made conjunctively with the client, the latter having better local knowledge on which sub-
areas are stable within an AOI.
Once the data have been “cleaned up”, it is possible to develop the history of movement across
the AOI. This is achieved by sequentially calculating the relative displacement between an
individual radar target and the reference point, throughout the entire period of the analysis.
Thus, the deformation is relative in time and space. A typical time series of movement of a PS
is shown in Figure 14.

Figure 14: A typical time series showing linear and non
It should be noted that the PSInSAR™
AOI, as well as providing error bar data for each PS, within the data base.
A priori information is always helpful before commencing a PS
be subsiding, then measurement can be satisfactorily made using
also referred to as ‘acquisition mode’. However, if the hazard is a landslide, where significant
horizontal movement might occur, the use of data acquired by satellites in both the ascending
and descending orbits will enable true
horizontal movement to be computed.
At the present time, it is not possible to determine the horizontal component of movement in
the North-South direction.
computations will require the use of at least 3 data sets with differing viewing geometries and
look angles.
6.4 Precision
Error bars of measurement of a PS
However, precision of the dis
data. The most important factors impacting on data quality are:
• Spatial density of the PS (the lower the density, the higher the error
• Quality of the radar targets
• Climatic conditions
• Distance between the measurement point
Figure 15 is a chart showing precision values obtained from many analyses of data from the
ERS, Envisat, and Radarsat
: A typical time series showing linear and non-linear patterns of movement
the PSInSAR™ algorithm generates a standard deviation
AOI, as well as providing error bar data for each PS, within the data base.
A priori information is always helpful before commencing a PS analysis. If an area is known to
be subsiding, then measurement can be satisfactorily made using a single
also referred to as ‘acquisition mode’. However, if the hazard is a landslide, where significant
horizontal movement might occur, the use of data acquired by satellites in both the ascending
and descending orbits will enable true vertical movement and the East-
horizontal movement to be computed.
At the present time, it is not possible to determine the horizontal component of movement in
South direction. However, research is underway to try to solve this
computations will require the use of at least 3 data sets with differing viewing geometries and
of measurement of a PS are calculated as the deformation pattern is developed
However, precision of the displacement calculations is an important element in validating PS
The most important factors impacting on data quality are:
Spatial density of the PS (the lower the density, the higher the error
Quality of the radar targets (signal-to-noise ratio levels)
Climatic conditions at the time of the acquisitions
Distance between the measurement point (P) and the reference (P0)
is a chart showing precision values obtained from many analyses of data from the
ERS, Envisat, and Radarsat-1 satellites.
Page | 22
linear patterns of movement.
generates a standard deviation map for the
analysis. If an area is known to
single viewing geometry,
also referred to as ‘acquisition mode’. However, if the hazard is a landslide, where significant
horizontal movement might occur, the use of data acquired by satellites in both the ascending
-West component of
At the present time, it is not possible to determine the horizontal component of movement in
However, research is underway to try to solve this problem.. Such
computations will require the use of at least 3 data sets with differing viewing geometries and
are calculated as the deformation pattern is developed.
placement calculations is an important element in validating PS
Spatial density of the PS (the lower the density, the higher the error bar)
)
is a chart showing precision values obtained from many analyses of data from the

.
Figure 15: Typical values
(P0), considering a multi-year dataset of radar images
Comparable values for the satellites launched during 2007/8 are not yet available since the
volume of data from these satellites that has bee
it is expected that precision will be improved because a) the sensors on the newer satellites are
more sophisticated, and b) the resolution cell sizes are smaller than those of the earlier
satellites.
6.5 Validation of PS Data
PS data have been compared with measurements obtained by other recognized measurement
methods. However, it must be remembered that InSAR methods determine relative
displacement, not absolute movement. Notwithstanding, it is possible
comparisons and Figure 16
Differential GPS and optical leveling surveys, as well as with thermal dilation modeling of
buildings. The interested readers should refer t
TRE.
Figure 16: Comparison
measurements have been resolved to the equiv
: Typical values of precision (1 sigma) for a point less than 1km from the reference point
year dataset of radar images.
Comparable values for the satellites launched during 2007/8 are not yet available since the
volume of data from these satellites that has been processed to date is still quite low. However,
it is expected that precision will be improved because a) the sensors on the newer satellites are
more sophisticated, and b) the resolution cell sizes are smaller than those of the earlier
Validation of PS Data
PS data have been compared with measurements obtained by other recognized measurement
methods. However, it must be remembered that InSAR methods determine relative
displacement, not absolute movement. Notwithstanding, it is possible
16, Figure 17 and Figure 18 show how PS data performed against
Differential GPS and optical leveling surveys, as well as with thermal dilation modeling of
The interested readers should refer to the technical papers published by POLIMI and
of PSInSAR™ with GPS data. The x, y and z components of GPS
measurements have been resolved to the equivalent LOS of the satellite data.
Page | 23
km from the reference point
Comparable values for the satellites launched during 2007/8 are not yet available since the
n processed to date is still quite low. However,
it is expected that precision will be improved because a) the sensors on the newer satellites are
more sophisticated, and b) the resolution cell sizes are smaller than those of the earlier
PS data have been compared with measurements obtained by other recognized measurement
methods. However, it must be remembered that InSAR methods determine relative
displacement, not absolute movement. Notwithstanding, it is possible to develop some
show how PS data performed against
Differential GPS and optical leveling surveys, as well as with thermal dilation modeling of
o the technical papers published by POLIMI and
The x, y and z components of GPS

Figure 17: Optical leveling
represent InSAR readings at the same location
Figure 18: Thermal Dilation
available to model such movement. The black line represents the results of a thermal dilation model
while the red triangles correspond to InSAR readings on the same building, measured over the same
time period.
6.6 Data Output and Presentation
The results of an InSAR analysis are best understood if they can be visualized and, in this
regard, geographic information systems (GIS) are excellent tools.
The digital data are provided in
in most spreadsheet software
Figure 19 shows a display of the database in which the location
history of each PS is listed, along with other data about the particular PS, such as coherence,
average velocity, acceleration, and height of the PS centroid relative to
point used in the PS analysis.
Visualization is possible using several forms:
• overlays on a digital orthophoto on a GIS
• overlays on an engineering drawing on a GIS
• overlays on a Google Earth platform
• on line hosting on
Optical leveling. The blue line is an optical benchmark correction curve; the red dots
R readings at the same location.
Dilation. Buildings move in response to changes in temperature and software is
available to model such movement. The black line represents the results of a thermal dilation model
while the red triangles correspond to InSAR readings on the same building, measured over the same
d Presentation
The results of an InSAR analysis are best understood if they can be visualized and, in this
regard, geographic information systems (GIS) are excellent tools.
The digital data are provided in ESRI shapefile format, which includes a database f
most spreadsheet software, and can be used as input to downstream modeling exercises.
shows a display of the database in which the location coordinates and displacement
history of each PS is listed, along with other data about the particular PS, such as coherence,
average velocity, acceleration, and height of the PS centroid relative to
point used in the PS analysis.
ualization is possible using several forms:
a digital orthophoto on a GIS
an engineering drawing on a GIS
on a Google Earth platform
hosting on a webGIS
Page | 24
The blue line is an optical benchmark correction curve; the red dots
n temperature and software is
available to model such movement. The black line represents the results of a thermal dilation model
while the red triangles correspond to InSAR readings on the same building, measured over the same
The results of an InSAR analysis are best understood if they can be visualized and, in this
database file, readable
am modeling exercises.
coordinates and displacement
history of each PS is listed, along with other data about the particular PS, such as coherence,
average velocity, acceleration, and height of the PS centroid relative to that of the reference

All of these options allow the viewer to obtain close up and r
PSInSAR™ service, a software tool is provided to enable the viewer to point the cursor to any
PS, click on it, and to view the pop up window showing the history of movement of that PS.
Figure 19(a-c) represents a sequence of screen grabs from a GIS showing the zooming features.
Figure 19(a): GIS area, showing PS.
Figure 1
Figure 19(a-c): These images are screen
deformation phenomena can be observed
TRE cannot confirm whether the viewing options described above are available from all
providers of PSI services but are standard procedure with the PSInSAR™ process.
7. SqueeSAR
In 2010, the new SqueeSAR™ algorithm was developed, which is an advance on the
PSInSAR™ algorithm. SqueeSAR™ is a
both ‘point wise’ PS and ‘spatially distributed scatterers’ (DS). The new algorithm provides
information in low-reflectivity homogeneous areas by identifying DS
with PSInSAR™.
All of these options allow the viewer to obtain close up and remote observation and, with the
PSInSAR™ service, a software tool is provided to enable the viewer to point the cursor to any
PS, click on it, and to view the pop up window showing the history of movement of that PS.
represents a sequence of screen grabs from a GIS showing the zooming features.
: GIS area, showing PS. Figure 19(b): GIS close up of AOI.
Figure 19(c): PS superimposed on topographical map.
These images are screen-grabs from a GIS showing how distant and close
deformation phenomena can be observed using GIS platforms.
TRE cannot confirm whether the viewing options described above are available from all
services but are standard procedure with the PSInSAR™ process.
In 2010, the new SqueeSAR™ algorithm was developed, which is an advance on the
PSInSAR™ algorithm. SqueeSAR™ is a second generation PSInSAR™ analysis: exploiting
and ‘spatially distributed scatterers’ (DS). The new algorithm provides
reflectivity homogeneous areas by identifying DS – previously
Page | 25
emote observation and, with the
PSInSAR™ service, a software tool is provided to enable the viewer to point the cursor to any
PS, click on it, and to view the pop up window showing the history of movement of that PS.
represents a sequence of screen grabs from a GIS showing the zooming features.
: GIS close up of AOI.
grabs from a GIS showing how distant and close-up views of
TRE cannot confirm whether the viewing options described above are available from all
services but are standard procedure with the PSInSAR™ process.
In 2010, the new SqueeSAR™ algorithm was developed, which is an advance on the
second generation PSInSAR™ analysis: exploiting
and ‘spatially distributed scatterers’ (DS). The new algorithm provides
previously unidentified

Page | 26
DS are typically identified from homogeneous ground, scattered outcrops, debris flows, non-
cultivated lands and desert areas. Figure 20 shows a schematic of the breakdown of the
distribution of PS and DS over a typical AOI. PS (as identified with the previous algorithm
PSInSAR™) usually correspond man-made objects. DS, as described above, are only identified
with the latest SqueeSAR™ algorithm and correspond to homogeneous areas of ground.
Satellite signals are not returned over heavily vegetated areas.
Figure 20: Schematic showing the distribution of PS and DS over a typical AOI. PS are identified as
single objects returning a strong signal to the satellite. DS are homogeneous areas or scattered
outcrops. Areas heavily covered by vegetation do not return the satellite signal.
SqueeSAR™ is the only algorithm that TRE offers due the redundancy of the PSInSAR™
algorithm, providing a significantly increased coverage of ground points, especially over non-
urban areas. Figure 21 shows a comparison between the number of ground points identified
using the previous PSInSAR™ algorithm and the latest SqueeSAR™ algorithm.
Figure 21: Comparison between the number of ground points identified using PSInSAR™ (previous
algorithm identifying only PS) and SqueeSAR™ (latest algorithm identifying both PS and DS). There
is a significant increase in the number of identified ground points

Page | 27
SqueeSAR™ exploits both PS and DS, providing a significantly higher density of ground
points and hence coverage of ground displacement over the AOI. A summary of the benefits of
SqueeSAR™ are given below:
• both PS and DS ground measurement points identified
• high density of ground points supplied
• time-series provided for each ground point identified
• millimetre accuracy on ground displacement values
• time-series standard deviation reduced compared to previous algorithm i.e. coherence
increased and noise decreased
• increased confidence on ground behaviour due to increased coverage of points –
especially significant for generic areas with low reflectivity
Since its introduction in 2010, as the replacement to the widely accepted PSInSAR™
algorithm, SqueeSAR™ has challenged the industry standard by identifying many more ground
points, and hence increasing overall understanding of ground displacement occurring in an
AOI.
8. Artificial Reflectors (AR)
In most cases, PS can be found for land use situations, although PS density and distribution
will vary from one application to another. Where PS density can be expected to be too low to
provide a reliable definition of ground stability, artificial reflectors (AR) can be deployed.
Inherently, it is not possible to reconstruct historical data using artificial reflectors, but it can be
used for monitoring uses.
Figure 22 shows four different kinds of reflector that have been used in InSAR analyses.
The single view reflectors are designed to reflect signals from a single viewing geometry, i.e.
ascending or descending. The dual geometry reflector is designed to maximize the radar cross
section for both ascending and descending geometries. The rotational orientation of the
reflecting surfaces has to be set quite precisely as there is limited room for error.
Artificial reflectors are specifically designed to reflect a high proportion of the satellite’s signal
directly back towards the satellite. This produces a strong and consistent amplitude signal
throughout all satellite images, providing coherent data stacks and allowing high accuracy
displacement values to be calculated.

Page | 28
Figure 20(a): Corner reflector Figure 20(b): Dihedral reflector
Figure 20(c): Trihedral reflector Figure 20(d): Double geometry reflector
Figure 22(a-d): Artificial reflectors.
9. Strengths and Weaknesses of PS Analyses
InSAR is a tool that adds value to all pre-existing methodologies for measuring surface
movement; it should not be considered as a ‘stand alone’ solution. There are situations where
InSAR will produce poor results, or simply won’t work. However, there are elements of the
technology that make it unique among most measurement methods. Table 2 summarizes some
of its strengths and weaknesses.
Strengths Weaknesses
• Non-intrusive and non-destructive
• Millimeter precision and accuracy
• Historic analyses are possible, back to 1992
• Cost effective, particularly over large areas
• Global data acquisition easy to achieve
• Vegetation and erosion impede InSAR
• Snow absorbs radar signals
• Not suited to movement > 300mm/year
• Blind to movement parallel to satellite
• Temporal sampling limited by repeat
orbit cycles
Table 2: Summary of strengths and weaknesses of InSAR

Page | 29
As newer satellites, with higher levels of technology, become operational so do some of the
limitations become less significant. For example, the newer satellites invariably have much
smaller resolutions cell sizes (3m x 3m for COSMO-SkyMed compared to 20m x 5m for
Envisat), and shorter repeat orbit cycles (8 days for COSMO-SkyMed in tandem operation
compared to 35 days for Envisat). Such characteristics reduce the limitations of vegetation and
temporal decorrelation.
10. Synergistic Use of PS and GPS
As PS data became a more familiar measurement technology, opportunities emerged for its
conjunctive use with Geographic Positioning Systems (GPS). This was stimulated largely by
the fact that the strengths of one technology were complemented by the weaknesses of the
other. Table 3 summarizes some of the complementary features of both technologies.
PS GPS
Temporal sampling constrained by satellite
repeat orbit cycles
Sampling is in real time
Millimeter displacement accuracy in vertical
direction
Centimetre displacement accuracy in
vertical direction
Spatial positioning accuracy in meters Spatial positioning accuracy in millimeters
High density of measurement points Low density of measurement points
No site work needed, generally Measuring stations have to be set up
Table 3: Comparison of PS and GPS technologies
Figure 23 shows the results of an analysis of ground movement in which GPS and PSInSAR™
technologies were used together. The data represent a measurement period of about 4 years.
The AOI is a landslide measuring approximately 3km x 2km in surface area.
The square boxes represent the locations of the GPS stations and their colour represents the
average displacement velocity measurements, according to the scale shown at the bottom of the
image. The coloured circles are the corresponding icons for the PSInSAR™ data. It can be
seen that reasonably good correlation was achieved between the two sets of data. The GPS data
provided a geodetic referencing for all the data and confirmation of the validity of the InSAR
data, while the latter provided a clear indication of the surficial extent of the landslide.

Page | 30
Figure 23: The Right Bank Landslide, Lake Sarez, Tajikistan showing the results of analyses of
movement using both GPS and PSInSAR™ technologies.

Page | 31
APPENDIX
Suggested books on InSAR and PSI
1. “Radar Interferometry – Data Interpretation and Error Analysis”
Author: Ramon F Hanssen, 2001. Publisher: Kluwer Academic Publishers
2. “Radar Interferometry: Persistent Scatterer Technique”
Author: Bert M. Kampes, 2006. Publisher: Springer
3. “InSAR Principles”
ESA Manual TM-19, February 2007, ISBN 92-9092-233-8
Technical References about the technology and its applications
1. W. Bell, F. Amelung, A. Ferretti, M. Bianchi, F. Novali, "Monitoring aquifer-system
response to groundwater pumping and artificial recharge," Water Resources Research
(February 2008), Vol. 44, pp. 1-18.
2. Burgmann R, Rosen P & Fielding E. "Synthetic Aperture Radar Interferometry to measure
earth's surface topography and its deformation." Annu. Rev. Earth Planet (2000) 28: pp. 169-
209.
3. Burgmann R, G. Hilley, A. Ferretti, and F. Novali "Resolving vertical tectonics in the San
Francisco Bay Area from permanent scatterer InSAR and GPS analysis," Geology (March
2006), Vol. 34, N. 3, pp. 221-224.
4. Rosen et al. "Synthetic Aperture Radar Interferometry." Proceedings of the IEEE (2008) 88.
5. Ferretti A, Prati C, and Rocca F. "Permanent Scatterers in SAR Interferometry" (January
2001), IEEE Transactions on Geoscience and Remote Sensing, Vol. 39, N. 1, pp. 8 -20.
6. Massonnet D & Feigl K. "Radar interferometry and its application to changes in the earth's
surface." Reviews of Geophysics (1998) 36: pp. 441-500.
7. Hilley G, Bürgmann R, Ferretti A, Novali F & Rocca F. "Dynamics of Slow-Moving
Landslides from Permanent Scatterer Analysis." Science Magazine (2004) 304: pp. 1952-1955.
8. Ferretti A, Savio G, Barzaghi F, Borghi A, Musazzi S, Novali F, Prati C & Rocca F.
"Submillimeter Accuracy of InSAR Time Series: Experimental Validation". IEEE Transactions
on Geoscience and Remote Sensing, Vol. 45, N. 5, May 2007, pp. 1142-1153.
9. Ferretti A., Novali F., Bürgmann R., Hilley G. and Prati C. "InSAR Permanent Scatterer
Analysis Reveals Ups and Downs in San Francisco Bay Area" EOS, Vol. 85, N. 34, 2004, pp.
317-324.
10. Dixon T, Amelung F, Ferretti A, Novali F, Rocca F, Dokka R, Sella G, Kim S, Wdowinski
S & Whitman D. "Subsidence and flooding in New Orleans." Nature (2006) 441: pp. 587-588.
11. Gabriel A., R. Goldstein and H. Zebker, "Mapping small elevation changes over large
areas: Differential radar interferometry," Journal Geophysical Research (1989), 94: 9183–
9191.

Page | 32
GLOSSARY
AOI Area Of Interest.
Amplitude The magnitude of an electromagnetic signal, also an indication of
the power.
Azimuth Direction of travel of a satellite.
Baseline The distance between two respective satellite paths.
Coherence The cross-correlation of adjacent pixels in a DInSAR (i.e. after
topographic components have been compensated for). A
coherence map is useful to identify areas of useful data.
Coherence values range from 0 (signal is noise) to 1 (neighbors
have identical signals, hence no noise). A threshold value is
chosen above which data are considered useful. Data in areas with
coherence values below the threshold value are considered noise.
DEM Digital Elevation Model.
DInSAR Differential Interferometric Synthetic Aperture Radar.
Foreshortening An effect that occurs on low-angle slopes, for example, hills or
shallow mountain flanks. The effect is to compress the image of
affected areas, shortening perceived distances in the range
direction. Resolution cells size is also increased and hence these
areas usually appear whiter on amplitude images.
Ground range The resolution cell size on the ground plane, always perpendicular
to the azimuth plane and dependent on the incidence angle of the
signal on the ground.
Interferogram A graphical representation of the change in phase values between
two satellite images.
Interferometry The measurement of signal phase change between two sinusoidal
signals. Typically, the shorter the wavelength the higher the
sensitivity to any change.
InSAR Interferometric Synthetic Aperture Radar.
Layover An effect that occurs on high-angle slopes, for example, steep hills
or mountain flanks. The effect is to overlay signals, creating
noise; hence these areas cannot be resolved.
LOS Line Of Sight.
Page | 33
Off-nadir The angle between a plane from the centre of the Earth to the
satellite and range direction.
Phase For a sinusoidal wave, phase values are proportional to signal
delay, which in turn are proportional to satellite - target distance.
PS Permanent (or Persistent) Scatterers. Objects on the ground that
repeatedly and consistently scatter signals back towards the
satellite over time, with constant amplitude values throughout
every image of the data set.
Range or slant range A radar coordinate that defines the distance from the sensor to the
target.
Resolution cell or pixel The physical size of the area imaged by one signal incident on the
ground plane. The pixel is represented by a complex number
containing a real amplitude value and a complex phase value. The
size of this area is dependent on several variables including: SAR
system, off-nadir angle, ground topography, etc.
SAR Synthetic Aperture Radar.
Satellite image A image composed of many resolution cells, the number of which
is dependent on the SAR system used, but typically sized 100km x
100km.
Shadow An effect that occurs on high-angle slopes, for example, steep hills
or mountain flanks. The combined effect of topography and the
incidence angle of the signal on the ground creates blind spots
behind the hill/mountain, thus resulting in no data obtained from
those areas.
SNR Signal to Noise Ratio.

Page | 34
PROCESS MAP
# Process Description
1 Data acquisition
Data are acquired in strips perpendicular to the satellite direction of
travel. Each strip is composed of pixels, the number of which varies
between SAR systems but usually ranges from 5,000 to 20,000. Each
pixel is represented digitally by a complex number. A grid of pixels
measuring 100km x 100km constitutes a satellite image. After
focusing the data, images of the phase and amplitude can be
produced. Amplitude images are good indicators of the reflectivity of
the ground surface – the higher the reflectivity, the better the chance
of extracting data. Phase images are not useful on their own but
contain information about topography, atmospheric effects, and target
displacement.
2 InSAR
(Interferometry)
The phase component of each respective pixel within two or more
satellite images is compared to identify phase shift. The process is
digital and graphical images (interferograms) are produced to extract
the most useful information.
3 Interferogram
A graphical representation of the InSAR results. Interferograms give
a quick and immediate insight into two key factors: a) is the data
coherent, i.e. is it useful? and b) has ground displacement occurred?
Images are represented with a scale from –π to π. Fringes occur over
areas of coherence indicating the possibility to measure the scale of
ground displacement in later procedures. Speckled areas indicate
noise (incoherence) from which useful data cannot be extracted. It
should be noted that interferograms do not compensate for
atmospheric effects, topographical errors or noise effects from the
SAR system present within the data, hence should only be used to
identify areas of coherence and footprints of possible ground
movement.
4 DInSAR
This process removes topographical signatures from the InSAR data
(corrected using a DEM). As with interferograms (#3), differential
interferograms allow the identification of coherent areas and areas of
possible ground movement, but with topographical effects removed.
It should be noted that differential interferograms are not adjusted for
errors induced from the atmosphere, SAR system noise nor errors in
the DEM, however they are useful in identifying the footprints of
ground movement.
5 Interferogram
stacking
A process by which multiple interferogram data are averaged (thus
increasing SNR). This theoretically increases the possibility to
extract displacement values over longer periods than are possible
using single DInSAR interferograms. However, this model has the
following constraints: a) ground displacement is assumed constant

Page | 35
over time, b) atmospheric contribution is not estimated and hence not
removed, c) data are heavily filtered hence smoothing abrupt features
and reducing resolution and d) only images with baselines of 300m or
less are considered for the stacking process thus potentially
overlooking. There is also no possibility to extract each PS’s time
series.
6 PSInSARTM
This process involves the identification of randomly spaced PS using
a series of satellite images (minimum 15). The atmospheric
correction procedure is then applied using the PS. The results have
significantly lower errors induced due to the removal of atmospheric
effects. Urban areas tend to produce many PS, non-urban areas less.
The number of PS can be artificially increased using artificial
reflectors – small metallic objects strategically placed on the ground
to strongly and consistently reflect radar signals. With atmospheric
and topographical effects removed, remaining data can be used to
extract the displacement values of each PS, relative to a single chosen
reference PS (chosen together with the client) and each PS’s
individual time series. These displacements are overlaid on a base
map provided by the client, which displays the displacements of each
PS in mm/yr. PSInSARTM
is a process that far exceeds previous
technologies with respect to accuracy of the data produced and can
give millimeter displacement accuracies, however, it should be noted
that the number of PS identified is strongly dependant on the terrain.
Heavily undulating or vegetated areas do not produce as many PS as
in urban areas. It should also be noted that displacement values are
calculated along LOS of the satellite and are not true displacement
velocities. In cases where ascending and descending radar images
identify identical PS, east-west velocities can be calculated, but north-
south velocities at present remain indeterminable.
7 SqueeSARTM
Second-generation PSInSAR™ analysis where both point-wise and
distributed scatterers are exploited. All possible interferograms are
generated and data are carefully weighted based on coherence levels.
The density of measurement points is significantly improved with
respect to PSInSAR™ results as well as the quality of the
displacement time series.