introduction to and basics of processing with...
TRANSCRIPT
IntroductiontoandbasicsofprocessingwithTRACK
M.A.FloydMassachusettsInstituteofTechnology,Cambridge,MA,USA
SchoolofEarthSciences,UniversityofBristolUnitedKingdom2–5May2017
MaterialfromT.A.Herring,R.W.King,M.A.Floyd(MIT)andS.C.McClusky (nowANU)
http://web.mit.edu/mfloyd/www/courses/gg/201705_Bristol/
KinematicGPS• ThestyleofGPSdatacollectionandprocessingsuggeststhat
oneormoreGPSstationsismoving(e.g.,car,aircraft)• Toobtaingoodresultsforpositioningasafunctionoftimeit
helpsiftheambiguitiescanbefixedtointegervalues.Althoughwiththe“backsmooth”optionintrackthisisnotsocritical.
• ProgramtrackistheMITimplementationofthisstyleofprocessing.TherealtimeversionistrackRT and trackRTB
• Unlikemanyprogramsofthistype,trackpre-readsalldatabeforeprocessing.(Thisapproachhasitsprosandcons)
2017/05/04 TrackKinematic 1

Generalaspects• Thesuccessofkinematicprocessingdependsonseparationof
sites• Ifthereareoneormorestaticbasestationsandthemoving
receiversarepositionedrelativetothese.• Forseparations<10km,usuallyeasy• 10>100kmmoredifficultbutoftensuccessful• >100kmverymixedresultsdependingonqualityofdata
collected.
2017/05/04 TrackKinematic 2

Slowmovingsites• Forslowmovingsites(glaciers,earlylandslides),gamit solutioncan
bemoreeasilyautomatedthantracksolutionsandcangeneratehighqualityresultsespeciallyifmotionisnearlylinear(withhighrates100m/yr forexample).
• Withgamit solutions:– Putbestestimateofvelocityintheaprioricoordinatefileusedin
gamit (positionestimatewillbethemeanoffsetfromthislinearmodel).
– Usesh_gamit with–sessinfo optiontohavemultiplesolutionsbeday(setstarttimeanddurationofeachsessione.g.,83-hrsessionsperday;36030-secepochspersession).Use–netext optiontoputeachsessionindifferentdirectory(-noftp afterfirstsessionalsospeedsuprunifsitesmissing).
– Sometuningofminxf inprocess.defaults andreducevaluesintrim_oneway_tol inautcln.cmd sothatsmalldatasetsarenotremoved.
• Trackcanalsobeusedforthesetypesofanalyses
2017/05/04 TrackKinematic 3

Issueswithlength• Assiteseparationincreases,thedifferentialionosphericdelaysincreases,atmosphericdelaydifferencesalsoincrease
• Forshortbaselines(<2-3km),ionosphericdelaycanbetreatedas~zeroandL1andL2ambiguitiesresolvedseparately.PositioningcanuseL1andL2separately(lessrandomnoise).
• ForlongerbaselinesthisisnolongertrueandtrackusestheMW-WLtoresolveL1-L2cycles
• IONEXfilescannowbeincludedtohelpwiththeionosphericdelayonlongbaselines.
2017/05/04 TrackKinematic 4
Trackfeatures• TrackusestheMelbourne-Wubbena WideLane(MW-WL)to
resolveL1-L2andthenacombinationoftechniquestodetermineL1andL2cyclesseparately.
• “Biasflags”areaddedattimesofcycleslipsandtheambiguityresolutiontriestoresolvethesetointegervalues.
• TrackusesfloatingpointestimatewithLC,MW-WLandionosphericdelayconstraintstodeterminetheintegerbiasesandthereliabilitywithwhichtheyaredetermined.
• Kalman filtersmoothingcanbeused.(Non-resolvedambiguityparametersareconstant,andatmosphericdelaysareconsistentwithprocessnoise).Whenatmosphericdelaysareestimated,thesmoothingoptionshouldalwaysbeused.
2017/05/04 TrackKinematic 5
Ambiguityresolution• Algorithmis“relative-rank”approach.Chi-squaredincrement
ofmakingL1andL2ambiguitiesintegervaluesforthebestchoiceandnextbestarecompared.Ifbesthasmuchsmallerchi-squaredimpact,thenambiguityisfixedtointegervalues.
• Testisoninverse-ratioofchi-squaredincrements(i.e.,Largerelativerank(RR)isgood).
• Chi-squaredcomputedfrom:– MatchofLCcombinationtoestimatedvalue(LC)– MatchtoMW-WLaveragevalue(WL)– Closenessofionosphericdelaytozero(lessweightonlonger
baselines)(LG)• RelativeweightsofLC,WLandLGcanbeset.• Estimatesareiterateduntilnomoreambiguitiescanbe
resolved.
2017/05/04 TrackKinematic 6

BasicGPSphaseandrangeequations
• Basicequationsshowtherelationshipbetweenpseudorangeandphasemeasurements
2017/05/04 TrackKinematic 7
!!!!
€
φ1i
k= γ i
k /λ1 − Iik /λ1 +N1i
k+v1i
k
φ2 i
k= γ i
k /λ2 − Iik /λ2
f1f2
&
' (
)
* +
2
+N2 i
k+v2 i
k
R1ik
= γ ik + Ii
k +w1i
k
R2 ik
= γ ik + Ii
k f1f2
&
' (
)
* +
2
+w2 i
k !!!!
€
γ!is!range,!
I!is!ionospheric!delay
λ!is!wavelength
v!and!w!are!noise!
L1-L2andMelbourne-WubbenaWideLane
• ThedifferencebetweenL1andL2phasewiththeL2phasescaledtotheL1wavelengthisoftencalledsimplythewidelane andusedtodetectcycleslips.Howeveritiseffectedbyfluctuationsintheionosphericdelay,whichisinverselyproportionaltofrequencysquared.
• ThelowerfrequencyL2hasalargercontributionthanthehigherfrequencyL1
• TheMW-WLremovesboththeeffectsontheionosphericdelayandchangesinrangebyusingtherangemeasurementstoestimatethedifferenceinphasebetweenL1andL2
2017/05/04 TrackKinematic 8

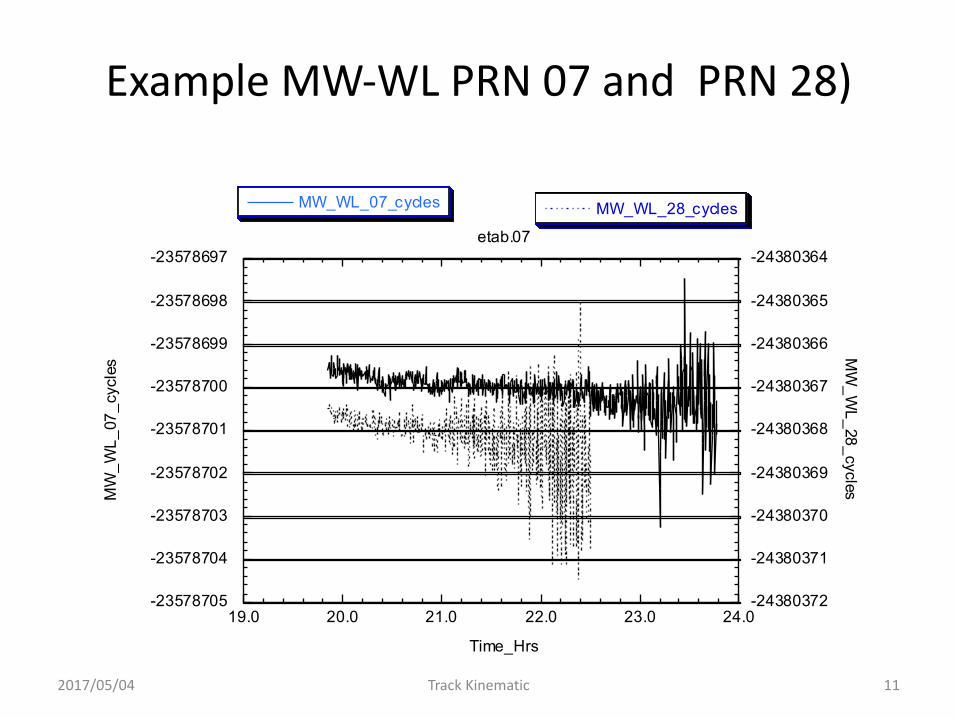
MW-WLCharacteristics• Inone-wayform,asshowninnextslide,theMW-WLdoes
notneedtobeanintegerorconstant• Slopeinone-wayiscommon,butnoticethatbothsatellites
showthesameslope.• Ifsamesatellite-pairdifferencefromanotherstation
(especiallywhensamebrandreceiverandantenna)aresubtractedfromtheseresultsthenwouldbeaninteger(evenatthisonestation,differenceisclosetointeger)
• TheMW-WLtellsyouthedifferencebetweentheL1andL2cycles.TogettheindividualcyclesatL1andL2weneedanothertechnique.
• ThereisaformulathatgivesL1+L2cyclesbutithas10timesthenoiseoftherangedataandgenerallyisnotused.
2017/05/04 TrackKinematic 9
Melbourne-WubenaWideLane(MW-WL)
• EquationfortheMW-WL.ThetermRf/caretherangeincycles(noticethesumduetochangeofsignionosphericdelay)
• TheDf/SftermforGPSis~0.124whichmeansrangenoiseisreducedbyaaboutafactoroften.
• TheML-WLshouldbeinteger(withinnoise)whendatafromdifferentsitesandsatellites(doubledifferences)areused.
• However,receiver/satellitedependentbiasesneedtobeaccountedfor(andkeptuptodate)[tables/dcb.dat].
2017/05/04 TrackKinematic 10
!!!!
€
mw−wl= φ1 −φ2 −( f1 − f2)
( f1 + f2)R1 f1 /c +R2 f2 /c[ ]
ExampleMW-WLPRN07andPRN28)
-23578705
-23578704
-23578703
-23578702
-23578701
-23578700
-23578699
-23578698
-23578697
-24380372
-24380371
-24380370
-24380369
-24380368
-24380367
-24380366
-24380365
-24380364
19.0 20.0 21.0 22.0 23.0 24.0
etab.07
MW_WL_07_cycles MW_WL_28_cycles
MW_W
L_07_cycles MW_W
L_28_cycles
Time_Hrs
2017/05/04 TrackKinematic 11
EX-WLExtra-Wide-lane• TheothermeasureofthedifferenceincyclesbetweenL1andL2usedbytrackistheEX-WL(ExtraWidelane).
• Thismeasureisindependentofgeometrybutisaffectedbytheionosphericdelays.OnshortseparationsthismeasureisoftenmorerobustthantheMW-WL.
• Whenwelookattrackbiasfixingnotethata1L1andL2slip(1/1slip)changestheEX-WLbyonly0.28cycles(53mm).(Thisisjust82mmofL1ionosphericdelay,0.5TECU)
!!!!
€
EX −WL = φ1 −φ2
λ2λ1
;λ2λ1
=1.28
2017/05/04 TrackKinematic 12

Basic Inputsfortrack.• Trackrunsusingacommandfile• Thebaseinputsneededare:– Obs_file specifiesnamesofrinex datafiles.SitescanbeKkinematicorFfixed
– Nav_file orbitfileeitherbroadcastephemerisfileorsp3file
– Modeair/short/long-- Modecommandisnotstrictlyneededbutitsetsdefaultsforvarietyofsituations
– Normallyback_type smoothwouldalsobespecified.• Normallystartwithjustthesecommandsandseehowtherunlooksandbasedonthisoutputstarttuningtrack.
2017/05/04 TrackKinematic 13
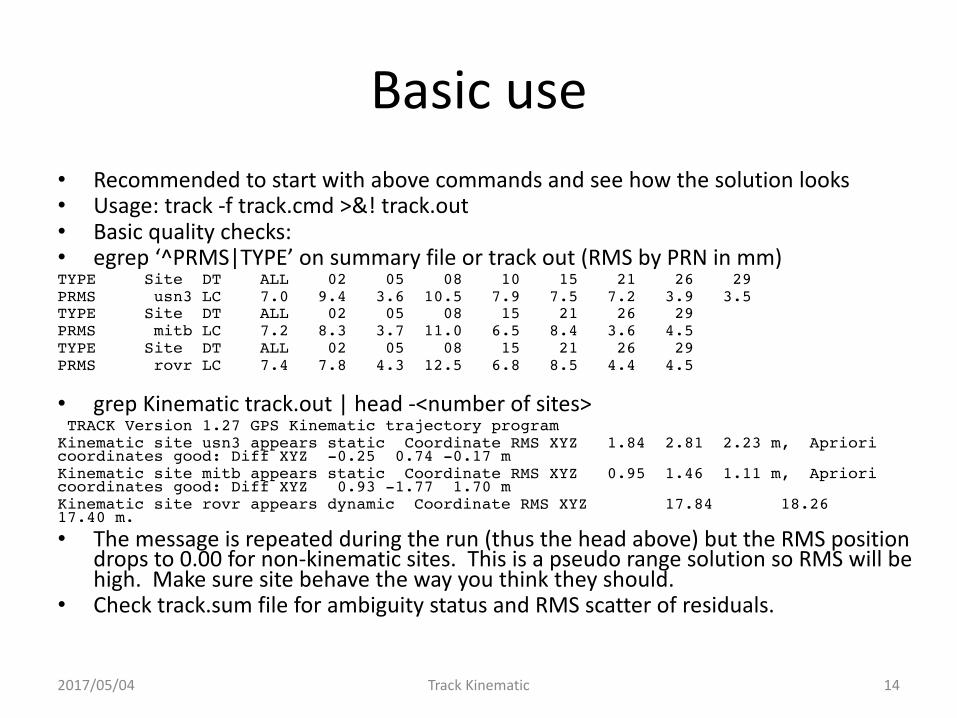
Basicuse• Recommendedtostartwithabovecommandsandseehowthesolutionlooks• Usage:track-ftrack.cmd >&!track.out• Basicqualitychecks:• egrep ‘^PRMS|TYPE’onsummaryfileortrackout(RMSbyPRNinmm)TYPE Site DT ALL 02 05 08 10 15 21 26 29PRMS usn3 LC 7.0 9.4 3.6 10.5 7.9 7.5 7.2 3.9 3.5TYPE Site DT ALL 02 05 08 15 21 26 29PRMS mitb LC 7.2 8.3 3.7 11.0 6.5 8.4 3.6 4.5TYPE Site DT ALL 02 05 08 15 21 26 29PRMS rovr LC 7.4 7.8 4.3 12.5 6.8 8.5 4.4 4.5
• grep Kinematictrack.out |head-<numberofsites>TRACK Version 1.27 GPS Kinematic trajectory program
Kinematic site usn3 appears static Coordinate RMS XYZ 1.84 2.81 2.23 m, Apriori coordinates good: Diff XYZ -0.25 0.74 -0.17 mKinematic site mitb appears static Coordinate RMS XYZ 0.95 1.46 1.11 m, Apriori coordinates good: Diff XYZ 0.93 -1.77 1.70 mKinematic site rovr appears dynamic Coordinate RMS XYZ 17.84 18.26 17.40 m.
• Themessageisrepeatedduringtherun(thustheheadabove)buttheRMSpositiondropsto0.00fornon-kinematicsites.ThisisapseudorangesolutionsoRMSwillbehigh.Makesuresitebehavethewayyouthinktheyshould.
• Checktrack.sum fileforambiguitystatusandRMSscatterofresiduals.
2017/05/04 TrackKinematic 14
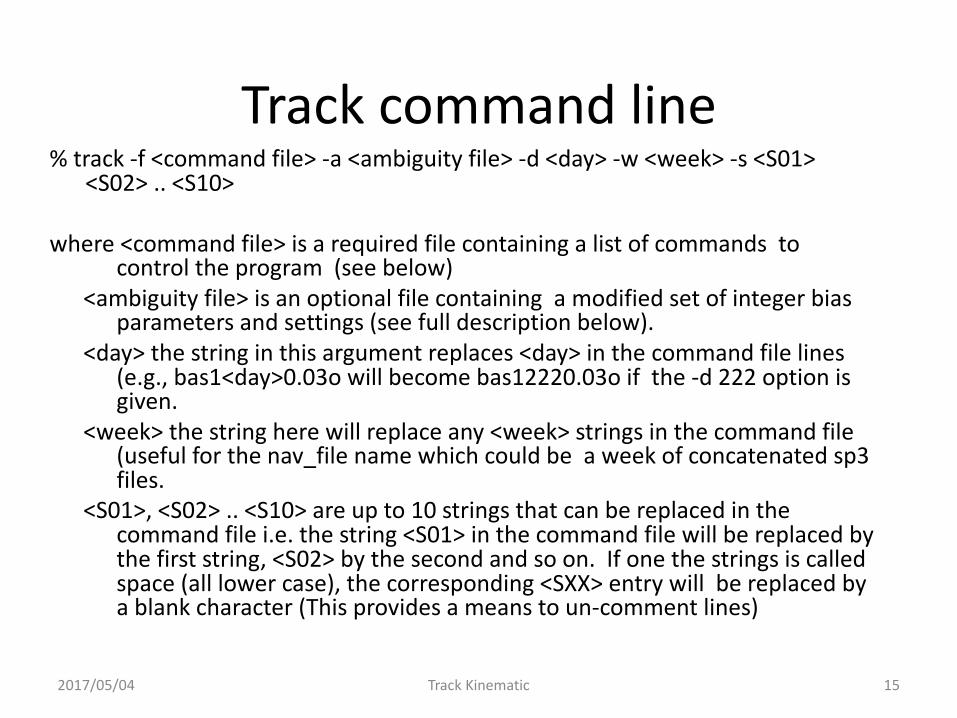
Trackcommandline%track-f <commandfile>-a<ambiguityfile>-d <day>-w <week>-s <S01>
<S02>..<S10>
where<commandfile>isarequiredfilecontainingalistofcommandstocontroltheprogram(seebelow)
<ambiguityfile>isanoptionalfilecontainingamodifiedsetofintegerbiasparametersandsettings(seefulldescriptionbelow).
<day>thestringinthisargumentreplaces<day>inthecommandfilelines(e.g.,bas1<day>0.03owillbecomebas12220.03oifthe-d 222optionisgiven.
<week>thestringherewillreplaceany<week>stringsinthecommandfile(usefulforthenav_file namewhichcouldbeaweekof concatenatedsp3files.
<S01>,<S02>..<S10>are upto10stringsthatcanbereplacedinthecommandfilei.e.thestring<S01>inthecommandfilewillbereplacedbythefirststring,<S02>bythesecondandsoon.Ifonethestringsiscalledspace(alllowercase),thecorresponding<SXX>entrywillbereplacedbyablankcharacter(Thisprovidesameanstoun-commentlines)
2017/05/04 TrackKinematic 15
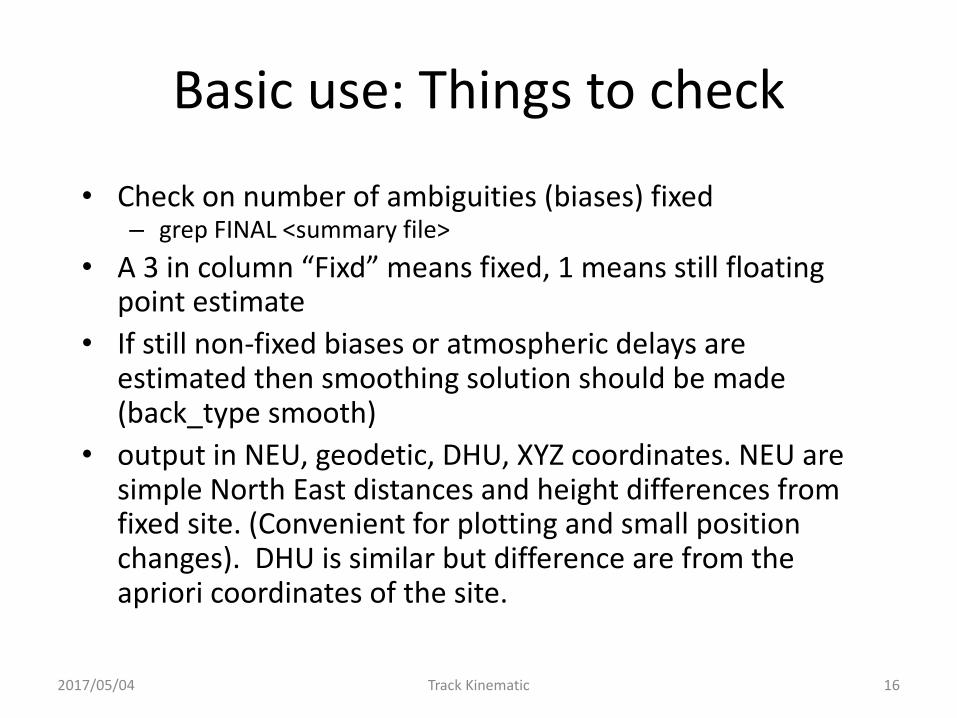
Basicuse:Thingstocheck
• Checkonnumberofambiguities(biases)fixed– grep FINAL<summaryfile>
• A3incolumn“Fixd”meansfixed,1meansstillfloatingpointestimate
• Ifstillnon-fixedbiasesoratmosphericdelaysareestimatedthensmoothingsolutionshouldbemade(back_type smooth)
• outputinNEU,geodetic,DHU,XYZcoordinates.NEUaresimpleNorthEastdistancesandheightdifferencesfromfixedsite.(Convenientforplottingandsmallpositionchanges).DHUissimilarbutdifferencearefromtheaprioricoordinatesofthesite.
2017/05/04 TrackKinematic 16
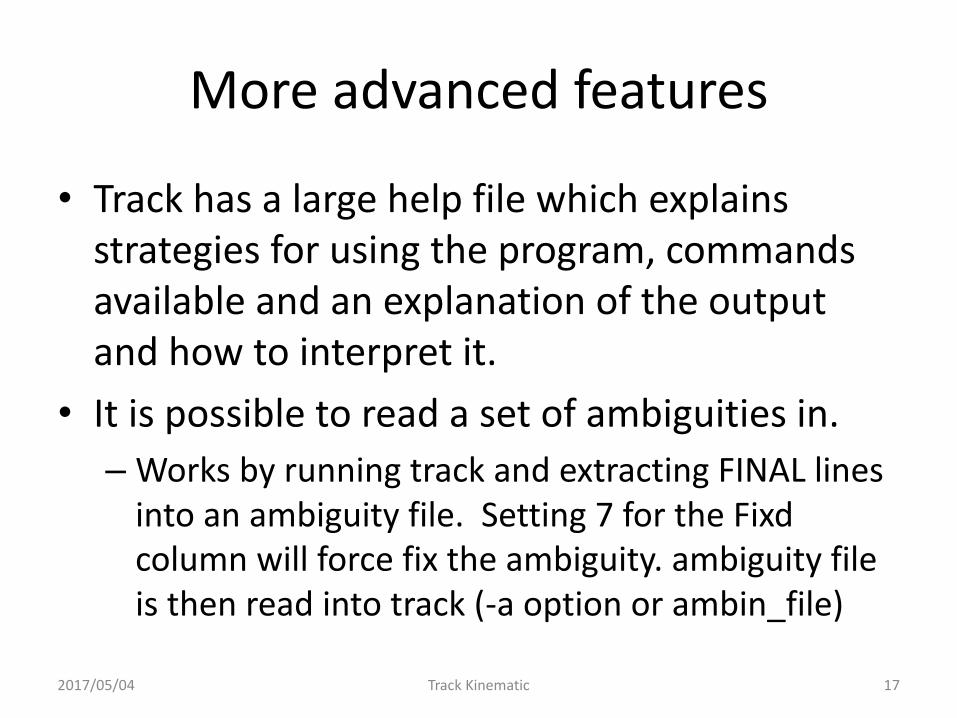
Moreadvancedfeatures
• Trackhasalargehelpfilewhichexplainsstrategiesforusingtheprogram,commandsavailableandanexplanationoftheoutputandhowtointerpretit.
• Itispossibletoreadasetofambiguitiesin.–WorksbyrunningtrackandextractingFINALlinesintoanambiguityfile.Setting7fortheFixdcolumnwillforcefixtheambiguity.ambiguityfileisthenreadintotrack(-aoptionorambin_file)
2017/05/04 TrackKinematic 17
Advancedfeatures
• Commandsallowcontrolofhowthebiasesarefixedandeditingcriteriafordata
• Editingistrickybecauseonmovingplatform,jumpsinphasecouldsimplybemovement
• IonosphericdelayandMW-WLusedforediting.
• Explicitedit_svs command• Explicitaddandremovebiasflags
2017/05/04 TrackKinematic 18
MainTunablecommands• BF_SET<Maxgap><Mingood>
– Setssizesofgapsindatathatwillautomaticallyaddbiasflagforpossiblecycleslip.Defaultis1,buthighratedataoftenmissesmeasurements.
• ION_STATS<Jump>– Sizeofjumpinionosphericdelaythatwillbeflaggedascycleslip.Can
beincreasedfornoisydata• FLOAT_TYPE<Start><Decimation><Type><Floatsigma
Limits(2)><WL_Fact><Ion_fact><MAX_Fit><RR>– Maincontrolonresolvingambiguities.Floatsigmalimits(forLCand
WL)oftenneedresettingbasedondataquality.– <WL_Fact><Ion_fact>controlrelativeweightsofWLandLGchi-
squaredcontributions.– RRisrelativeranktolerance
• Fcodeinoutputisdiagnosticofwhybiasesarenotresolved.
2017/05/04 TrackKinematic 19
Othercommoncommands• USR_ADDBF<site><prn#><time(ymdhms)>Allowsusertoaddabiasfileatsite<site>forPRN<prn#>at
time<time>.Firstvalidmeasurementatoraftertimewillbeflags.
• USR_DELBF<site><prn#><time(ymdhms)>Allowsusertodeleteabiasfileatsite<site>forPRN<prn#>at
time<time>.Thetimemustmatchwithin50%ofsamplinginterval.
2017/05/04 TrackKinematic 20
TrackOutputFiles• Trackoutputsprogressdirectlytothescreenandthisoutput
canbere-directedwith>toafile.(Generallytrack_xxx.out)• Summaryfile(track.sum bydefault)• Positionfiles(NEU,GEOD,DHU,XYZ)• Phaseresidualfiles(optional)• Wide-lanevaluefiles:(optional,sometimeusefulifcycleslip
missed)• Meaningofoutputentriesdiscussedinhelpfile.
2017/05/04 TrackKinematic 21
Summaryfile
• Thisfileisashortsummaryoftherun.Itlists– filesandparametersthatwereusedfortherun– Processnoisevalues– Anyeditingspecifiedbytheuser– FINALbiasflagreport.TheFixdcolumnindicatesifthebiaswasfixed(denotedbyvalue3).
– Summaryofresidualscatterasfunctionofsiteandsatelliteandversuselevationangle(TheseareRMSdifferencesfromfixedstation)• GenerallyresidualRMSshouldbelessthan10mmalthoughvaluesupto20mmcanbeOK.
2017/05/04 TrackKinematic 22

Outputfilefromtrack• Trackoutputsextensiveinformationduringitsrun.– Theinitialoutputisstatusduringreadingoftherinexfiles.Errorsinthefilesarereportedhereandasummaryofsatellitesseen.• Mostcommonproblemhereisnosamplingrategiveninrinex file.CommandINTERVALneedstobeused.
– AninitialpseudorangesolutionestablishesthetrajectoryofthekinematicsitesandstatisticsondifferencesfromaprioricoordinatesandRMSscatteroftrajectoryaregiven.
– Biasflagsbeingadded duetojumpsinwide-lanesarereported.
– BadaprioricoordinatescanleadtoBADPREFITdata(seesite_pos)
2017/05/04 TrackKinematic 23

Outputcontinued• SummaryofBiasflagsneededwithestimatesofnumbersof
cycles.Thesearereportedbysite,satelliteandepochrange.Initialsetare labeledINITIAL.
• EstimatesofmeanMW-WLandMeanIonosphericdelay (EX-WL)alongwithsigmaestimatesaregiven.(Acorrelationtimeisassumedinthesigmacalculation).
• Dependencesofbiasesaregivenwiththe‘DDbiasrefs’entries.Althoughlistedasoneways,valuesaredoubledifferences.
2017/05/04 TrackKinematic 24

Outputcontinued• Iteratively,tracktriestoresolvetheambiguitiestointeger
values.– Floatingpointestimatesofthebiasesastheyareestimated.– RMSfitofthedoubledifferenceresiduals– Anybaddoubledifferencesarereportedandremoved(repeating
valuescanbeindicationofmissedcycleslip).– Biasflagfixingreport:Fixcolumn(TorF)indicatesifbiaswas
successfullyfixed.TheFcodecolumnindicateswhyitwasnotfixed.• Thissequenceisrepeateduntilaniterationwhennonew
biasesarefixed.• Thefinalpositionestimatesarethencomputedandoutputin
therequestedformats.
2017/05/04 TrackKinematic 25

FcodeInterpretation• Forfloat_typeLCtheFcodeis• S-- Floatingpointestimatesigmatoolarge(SigLimit)• W-- MWWLsigmatoolarge• R-- Relativeranknotlargeenough• C-- Chi**2incrementtoolargeforthebestchoiceof
ambiquities• O-- Oneotherbiasinthedoubledifferencesnotfixedyet.
* BF S PRN Epoch Range F Estimate dLC Sig Limit Relative Rank Fix Fcode Change L1 L2 Residual L1 L2 Fits Best LC WL LG175 5 PRN 15 1 43 1 1.86 +- 0.24 SL 0.25 RR 2.36 F F --R-- dL1,2 3 3 dL12 0.31 -0.08 Fits 11.7 0.8 0.3 105.748 2 PRN 07 1 429 1 -0.16 +- 0.74 SL 0.25 RR 9660.51 F F S---O dL1,2 0 0 dL12 -0.28 -0.02 Fits 0.4 0.1 0.1 2.1
2017/05/04 TrackKinematic 26

Improvingambiguityresolution• TheFcodes canindicatehowtofixambiguitiesthattrackby
defaultisnotabletofix.• Commonfixes:
– SandWindicatethattheestimatedsigmas onthefloatestimatesand/orMW-WLaretoolarge.Iftherelativeranksarelarge,thethesigmatolerancescanbeincreasedwiththeFloat_type command,
– Ifambiguitiesseemtohavethesamevaluethenuser_delbf canbeusedtoremoveanextraonebutcareshouldbetakenbecausesomereceiverscanhave1/1L1L2cycleslips.
– Chi-squaredincrementsmaybetoolarge(especiallyLG(ionosphere)andsometimesWLso,bydown-weightinginthefloat_type command,relativerankcanbeimproved.
2017/05/04 TrackKinematic 27

Inputionosphericdelaymodel• Version1.26andgreateroftrackhavetheabilitytoreadagriddedionosphericdelaymodel.TheformatofthismodelisexpectedtomatchthecurrentIGSglobalionosphericmodelsavailablefromcddis.gsfc.nasa.govinthegps/productions/ionex/<yyyy>/<ddd>directory.
• CommandIONEX_FILE<filename>invokesthefeatures.TheEX-WLestimatesareaffectedbythismodelanditsinclusionshouldhelpambiguityresolutiononlongbaselines(>100km).
2017/05/04 TrackKinematic 28
Useofinputambiguityfile
• Forcertainanalyses,itcanbeusefultomanuallysupplyambiguityfiletotrackusingeitherthe-aoptionortheamb_filecommand.
• Theambiguityfilecanbegeneratedbygrep’ing FINALinthetracksummaryoroutputfileandre-directingintoan
2017/05/04 TrackKinematic 29
Othertunableparameters• Processnoisetobeusediftheatmosphericdelayisvariable– Ifnoiseistoolarge,thenheightestimatesandatmosphericdelayestimatesarehighlycorrelated
– Ifnoiseistosmall,thenatmosphericdelayvariationsmapintoheightvariations
– Foraircraft,tracknowhasprocessnoisethatdependsontherateofchangeofaltitude.
– Unitsofprocessnoisearerandom-walkchangeinmetersper unittime(standarddeviationgrowsassquareofnumberofepochs),wherethedefaultunittimeisthesamplinginterval,buttheunitcanbesetwiththetime_unit command
2017/05/04 TrackKinematic 30
TrackCommands:“Rules”
• Trackcommandfilessharethepropertiesasglobk commandfiles:– Allcommandlinesmuststartwithalessoneblankspace;argumentsareseparatedbyspaces
– Orderofcommandsisgenerallynotimportantexceptthatlaterversionsofacommandreplacethepreviouslyassignedarguments
– Sitedependentcommandsintrackissuethecommandnamefirstandthenlinesthatcontainstationnamesandarguments(allisavalidname).
2017/05/04 TrackKinematic 31
Plottingtrackresults
• sh_plot_track isascript(usingGMT)thatcanplottrackresults.Featuresarestillbeingaddedtothisscript.
• Forquickplotsweusethegamit/globk X-windowsprogram cplotx.
• WealsouseKaleidagraph (commercialprogram),Matlab andGMT
• OutputfilesareASCIIwithavarietyoftimetags(YYMMDDHRMINSEC,FractionalDayandEpochnumber)
2017/05/04 TrackKinematic 32
Finalcomments• Themostcommonparametersthatneedtobechangedintrack
are:– Thedatagapthatwillautomaticallybetreatedasacycleslip(default
is1)butmosthighratedata(>=1Hz)hasgapsduetorecordingproblems.
– ThesigmalimitsfortheLCestimateandMW-WLestimatesoftenneedtobeincreased.Trackhasacorrelationtimeinsigmacalculationthatforthedefaultsettingcanmakethesigmas toolarge.
– Makesureantennaandreceiverinformation(ifmixed)arecorrect.– Treatmentoftheatmosphericdelay.Thereisahighcorrelation
betweentheatmosphericdelayandheightwhenbotharestochastic(RhoUA columninoutputtimeseries).
– WeightfortheEX-WL(effectedbytheionosphere)onlongbaselinesandwhentheionosphereisactive.Ionex_file commandmayhelp.
2017/05/04 TrackKinematic 33
Trackcommands(The@denotesatleastoneblankinthelinesbelow).@OBS_FILE@SiteRX_file Type
Commandgivesthesite4-charcodesandthecorrespondingrinex filename.The
<Type>issettoFforafixedsite,andKforakinematicsite.e.g.,obs_filebish bisha289.97oFt39at391a289.97oK
2017/05/04 TrackKinematic 34
TrackCommands@NAV_FILE<name><SP3/NAV>GivesthenameoftheSP3orNAVfilewithorbitsandclock
information(e.g.,igs SP3files).Whenprocessing24-hoursofdata,SP3filesfromtheprecedingand
postcedingdaysshouldbeconcatenatedtogether(headersremovedattheday
boundaries).e.g.,nav_file igs09274.sp3SP3
(GAMITprogramdoy canbeusedtogetGPSweekanddaynumberfromcalendardate).
IfNAVisusedasthetypethenabroadcastephemerisfileisused.
2017/05/04 TrackKinematic 35
TrackCommands@MODE<Type>TheMODEcommandallowsthesettingofdefaultsforthetypeofdata
beingprocessed.Thesesettingcanthenbeoverwrittenifdesiredbyuseofthecommandsbelow.Threedefaultsettingmodesaresupportedfor<Type>:
AIR-- Assumedtobehigh-samplerateaircraft.Setstheanalysis_typetoLC,andallowsgapsof4-epochs,andminimumdataof120epochs(1minutefor2Hzdata).
SHORT-- Shortbaselinestaticdata(<1km).SetsanalysistypetoL1+L2andminimumdataof20epochs(10minutesof30secondsampleddata).Dataisstillprocessedaskinematicdata.
LONG-- Longbaselinestaticdata(>1km).SetssearchandanalysistypetoLCandmininum dataof20epochs.Atmosphericdelayestimationisturnedonwith0.1m apriorisigma,andprocessnoisevarianceof1.d-6m**2/epoch(~1mmchangesevery30secondsfor30secondsampleddatawhichaccumulatesto+-5cminaday).Thesesettingsarethesameasatm_stats 0.10.001
2017/05/04 TrackKinematic 36

TrackCommands@SITE_POS@Site<X(m)><Y(m)><Z(m)><Vx (m)><Vy (m)><Vz (m)>
<Epoch(yrs)>Siteisthefourcharacternameofthesite(morecharacterscanbe
includedbutonlythefirst4arechecked).Sitenamesthatdonotappearinthelistofsitestobeprocessedareignored).Theremainderofthelinecontainspositionandvelocityandtheepochindecimalyearstowhichthepositionrefers.
• Velocityisoptional• Ifthiscommandnotused,rinex headercoordinatesareused(can
beaproblemwithtruekinematicsitesthatmovelargedistances.Inthesecasespositionshouldbeforstartofdata.BADPREFITclockerrormessagesareanindicationthatcoordinatesmaybebad).
2017/05/04 TrackKinematic 37
TrackCommands@SITE_STATS@Site<AprioriSigmainXYZ><RWnoiseinXYZ>Givesstatisticstoassigntothekinematicstationpositions.The<AprioriSigmainXYZ>arethethreesigmas inXYZfortheinitialpositionand<RWnoiseinXYZ>arethethreesigmas inXYZforthechangeinpositionbetweenepochsofdata.Sincethemotionofthekinematicsitesismodeledasrandomwalk(RW),thesigmaofthechangeinpositiongrowsasthesqrt(number ofepochs)
Ver 1.21andlater:RWnoiseissigmas (m)/sqrt(time unit)wheretime_unit commandisusedtosettimeunit.ALLcanbeusedforthestationnameandthesamestatisticswillbeappliedtoallkinematicsites(NOTE:thefixedsitedonotchangeposition).e.g.site_statsall202020202020
(20metersapriorisigmas andchangesof20metersbetweenepochs).Feature1.24:AddedPOSTasentryaftertheApriorisigmavalues,toallowspecificationaposteroi sigmaforpositionattheendofthedataspan.
2017/05/04 TrackKinematic 38

Trackcommands@TIMEDEP_PROCNS@SiteSigXYZ(m/sqrt(t))StartYYMMDDMNSecEndYYMMDDMNSec
Allowstimedependentprocessnoisetobeaddedthestatisticsofasiteortoallsites.Thenoisesigmas areadded(inavariancesense)tothenoiseprocessesspecifiedintheSITE_STATScommand.Noteonlytherandomwalkprocessnoiseischanged.
Thiscommandisusefulforlong-baselineprocessingofsurfacewavearrivals(processnoiseincreasedduringsurfacewavearrivals).
2017/05/04 TrackKinematic 39
Trackcommands@ATM_STATS@Site<AprioriZenithdelaysigma><RWnoiseinZenithdelay><RWdH/dt
noise/SCALE>Givesthestatisticsfortheatmosphericdelaysbysite.Thevaluesaretheinitialsigma
inmeters,RWchangesinmetersperepochand(addedversion1.2)adH/dtvariancetermsothatduringrapidheightchangesmoreprocessnoisecanbeaddedtozenithdelayestimate.Theprocessnoisevarianceis(<RWdH/dtnoise)*abs(dh/dt)>^2perepochwheredh/dt ism/s.Typicalvalueis0.00023
e.g.,atm_statst39a0.10.00030.00023
Settheapriorisigmaas10cmandallowsthedelaytochange0.3mmeveryepoch(for1Hzdata,thisleadto18mmnoisein1hr)and2.3mmperepochwhenheightischangingat10m/s(fastascentordesent)
TheSCALEoptioninsteadofthedH/dt term,estimatesanatmosphericdelayscalefactorasafunctionoftheheightdifferencebetweenthebase-stationandaircraft.Ifthebasestationisfarfromtheaircraftstartinglocation,thenaconstantatmosphericdelaytermatthebasestationshouldbeestimated.
2017/05/04 TrackKinematic 40
TrackCommands@REF_NEU<X(m)><Y(m)><Z(m)>SetthetheXYZcoordinatesofthepointrelativetowhichNEUoffsetsarecomputed.Defaultisthecoordinatesofthefirstsiteintheobs_file list.
@TIME_UNIT<epoch/sec/min/hour/day>Setsthetimeunitforprocessnoise.Choicesareepoch(default),seconds,minuteshourorday.Intervalcommandmustbeusedtospecifysamplingintervalbeforethiscommandisused.(Evenwhentheintervalisgivenintherinex files).
2017/05/04 TrackKinematic 41
TrackCommands@DATA_NOISE<L1><L2><P1><P2><Elev Weight>[PRN]Allowsspecificiation ofthenoiseintheL1phase,L2phase,P1
rangeandP2range,andtheweightgiventoelevationangledepedence (atver 1.20);varianceisscaledby(1+(W/sin(el))^2)whereWisthe<Elev Weight>.
Thesevaluesaffectthesigmas printedforthepositiondeterminations(Units:m forall,exceptweight)
Optional:PRNmaybeaddedandnoiseassignedtothatPRN(ifnon-PRNformisused,thiswillreplaceallPRNspecificvaluessousethenon-PRNfirstfollowedbyspecificPRNvalues
2017/05/04 TrackKinematic 42
Trackcommands@DATA_TYPE<choice1><choice2>...Allowsspecificationofdatatypestobeusedingeneratingpositionestimates.Thechoicesare:L1-- L1onlyphaseL2-- L2onlyphaseLC-- IonosphericdelaycorrectedphaseP1-- L1pseudo-rangeP2-- L2pseudo-rangePC-- Ionosphericdelaycorrectedpseudo-range.Thedatatypesmaybecombinedineachofthechoices,e.g.,L1+L2wouldusebothL1andL2whileassumingthattheionosphericdelayis
negligible.Example:data_type l1l1+l2lc+p1Thiscommandsallowsmultiplesolutionstobeoutputfromtheonerun.
NOTE:Thefloat_type commanddeterminesthedatatypeusedtoresolveambiguities.
2017/05/04 TrackKinematic 43

Completelistcommands@OBS_FILE@SiteRX_file Type@SiteRX_file Type@NAV_FILE<name><SP3/NAV>@MODE<Type>@SITE_POS@Site<X(m)><Y(m)><Z(m)>@REF_NEU<X(m)><Y(m)><Z(m)>@TIME_UNIT<epoch/sec/min/hour/day>@SITE_STATS@Site<AprioriSigmainXYZ><RWnoiseinXYZ>@TIMEDEP_PROCNS@SiteSigXYZ(m/sqrt(t))StartYYMMDDMNSecEndYYMMDDMNSec
2017/05/04 TrackKinematic 44
Completelistcommands@ATM_STATS@Site<AprioriZenithdelaysigma><RWnoiseinZenithdelay><RW
dH/dt noise/SCALE>@ATM_BIAS@Site<Atmosphericdelayoffset(m)>@ATM_FILE<Filename>@USE_GPTGMF<Relativehumidity(0-1)>@ANTE_OFF@Site<ARPdN (m)><ARPdE (m)><ARPdU (m)><AntennaName>@BF_SET<Maxgap><Mingood>@DEBUG<StartEP><EndEP>@DATA_NOISE<L1><L2><P1><P2><Elev Weight>[PRN]
2017/05/04 TrackKinematic 45
Completelistofcommand@DATA_TYPE<choice1><choice2>...@OUT_SIG_LIMIT<sigma(m)>@RMS_EDIT_TOL<n-sigmalimit>@EDIT_SSV<site><prn #><starttime><stoptime>@USR_ADDBF<site><prn #><time(ymdhms)>@USR_DELBF<site><prn #><time(ymdhms)>@AMBIN_FILE<filename>@ANTMOD_FILE<filename>@FLOAT_TYPE<Start><Decimation><Type><FloatsigmaLimits(2)>
<WL_Fact><Ion_fact><MAX_Fit>[RelRank]@MIN_TOLS<minLCsig><WLTau>@BACK_TYPE<string>@ION_STATS<Jump><IONPPM><IONWeight><IONheight><IONspatial>@POS_ROOT<string>
2017/05/04 TrackKinematic 46

Completelistofcommands@RES_ROOT<string>@SUM_FILE<string>@WLS_ROOT<string>@RWL_ROOT<string>@OUT_TYPE<string>@IONEX_FILE<filename>@CUT_OFF<minelevationangle>@START_TIME<YearMonthdayhourminsec>@INTERVAL<seconds>@NUM_EPOCHS<number>@EXCLUDE_SVS<listofPRNnumberstobeexcluded>@STOPGO_MODE<Variancereduction>@MWWL_JUMP<tol cycles>
2017/05/04 TrackKinematic 47