introduction to information geometryintroduction to differential geometry geometric structure of...
TRANSCRIPT

Introduction to Information Geometry– based on the book “Methods of Information Geometry ”written by
Shun-Ichi Amari and Hiroshi Nagaoka
Yunshu Liu
2012-02-17

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Outline
1 Introduction to differential geometryManifold and SubmanifoldTangent vector, Tangent space and Vector fieldRiemannian metric and Affine connectionFlatness and autoparallel
2 Geometric structure of statistical models and statistical inferenceThe Fisher metric and α-connectionExponential familyDivergence and Geometric statistical inference
Yunshu Liu (ASPITRG) Introduction to Information Geometry 2 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Part I
Introduction to differential geometry
Yunshu Liu (ASPITRG) Introduction to Information Geometry 3 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Basic concepts in differential geometry
Basic conceptsManifold and SubmanifoldTangent vector, Tangent space and Vector fieldRiemannian metric and Affine connectionFlatness and autoparallel
Yunshu Liu (ASPITRG) Introduction to Information Geometry 4 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Manifold
Manifold SManifold: a set with a coordinate system, a one-to-one mapping from S to Rn,supposed to be ”locally” looks like an open subset of Rn”Elements of the set(points): points in Rn, probability distribution, linearsystem.
Figure : A coordinate system ξ for a manifold S
Yunshu Liu (ASPITRG) Introduction to Information Geometry 5 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Manifold
Manifold SDefinition: Let S be a set, if there exists a set of coordinate systems A for Swhich satisfies the condition (1) and (2) below, we call S an n-dimensionalC∞ differentiable manifold.
(1) Each element ϕ of A is a one-to-one mapping from S to some opensubset of Rn.
(2) For all ϕ ∈ A, given any one-to-one mapping ψ from S to Rn, thefollowing hold:ψ ∈ A ⇔ ψ ◦ ϕ−1 is a C∞ diffeomorphism.
Here, by a C∞ diffeomorphism we mean that ψ ◦ ϕ−1 and its inverse ϕ ◦ ψ−1
are both C∞(infinitely many times differentiable).
Yunshu Liu (ASPITRG) Introduction to Information Geometry 6 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Examples of Manifold
Examples of one-dimensional manifold
A straight line: a manifold in R1, even if it is given in Rk for ∀ k > 2.Any open subset of a straight line: one-dimensional manifoldA closed subset of a straight line: not a manifold
A circle: locally the circle looks like a lineAny open subset of a circle: one-dimensional manifoldA closed subset of a circle: not a manifold.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 7 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Examples of Manifold: surface of a sphere
Surface of a sphere in R3, defined by S = {(x, y, z) ∈ R3|x2 + y2 + z2 = 1},locally it can be parameterized by using two coordinates, for example, we canuse latitude and longitude as the coordinates.nD sphere(n-1 sphere): S = {(x1, x2, ..., xn) ∈ Rn|x2
1 + x22 + ...+ x2
n = 1}.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 8 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Examples of Manifold: surface of a torus
The torus in R3(surface of a doughnut):x(u, v) = ((a + b cos u)cos v, (a + b cos u)sin v, b sin u), 0 6 u, v < 2π.where a is the distance from the center of the tube to the center of the torus,and b is the radius of the tube. A torus is a closed surface defined as productof two circles: T2 = S1 × S1.n-torus: Tn is defined as a product of n circles: Tn = S1 × S1 × · · · × S1.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 9 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Coordinate systems for manifold
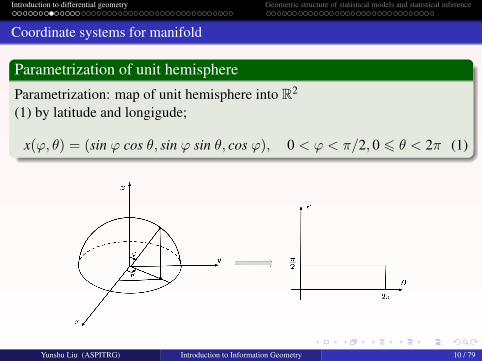
Parametrization of unit hemisphere
Parametrization: map of unit hemisphere into R2
(1) by latitude and longigude;
x(ϕ, θ) = (sin ϕ cos θ, sin ϕ sin θ, cos ϕ), 0 < ϕ < π/2, 0 6 θ < 2π (1)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 10 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Coordinate systems for manifold
Parametrization of unit hemisphere
Parametrization: map of unit hemisphere into R2
(2) by stereographic projections.
x(u, v) = (2u
1 + u2 + v2 ,2v
1 + u2 + v2 ,1− u2 − v2
1 + u2 + v2 ) where u2 + v2 6 1 (2)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 11 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Examples of Manifold: colors
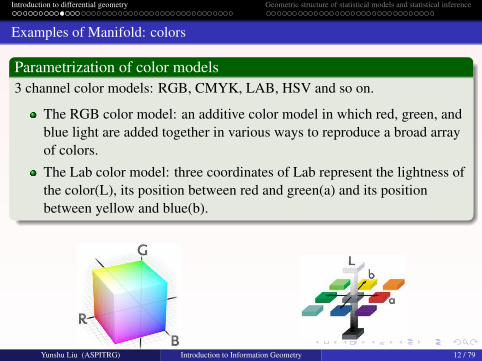
Parametrization of color models3 channel color models: RGB, CMYK, LAB, HSV and so on.
The RGB color model: an additive color model in which red, green, andblue light are added together in various ways to reproduce a broad arrayof colors.
The Lab color model: three coordinates of Lab represent the lightness ofthe color(L), its position between red and green(a) and its positionbetween yellow and blue(b).
Yunshu Liu (ASPITRG) Introduction to Information Geometry 12 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Coordinate systems for manifold
Parametrization of color modelsParametrization: map of color into R3
Examples:
Yunshu Liu (ASPITRG) Introduction to Information Geometry 13 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Submanifolds
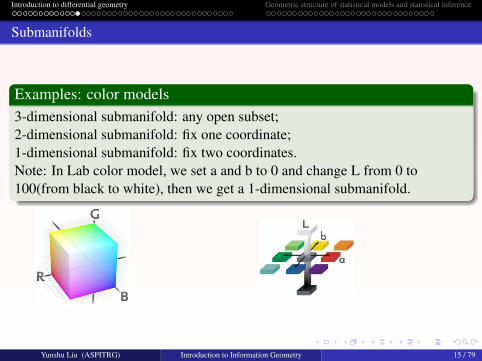
SubmanifoldsDefinition: a submanifold M of a manifold S is a subset of S which itself hasthe structure of a manifoldAn open subset of n-dimensional manifold forms an n-dimensionalsubmanifold.One way to construct m(<n)dimensional manifold: fix n-m coordinates.
Examples:
Yunshu Liu (ASPITRG) Introduction to Information Geometry 14 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Submanifolds
Examples: color models3-dimensional submanifold: any open subset;2-dimensional submanifold: fix one coordinate;1-dimensional submanifold: fix two coordinates.Note: In Lab color model, we set a and b to 0 and change L from 0 to100(from black to white), then we get a 1-dimensional submanifold.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 15 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Basic concepts in differential geometry
Basic conceptsManifold and SubmanifoldTangent vector, Tangent space and Vector fieldRiemannian metric and Affine connectionFlatness and autoparallel
Yunshu Liu (ASPITRG) Introduction to Information Geometry 16 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Curves and Tangent vector of Curves
CurvesCurve γ: I → S from some interval I(⊂ R) to S.Examples: curve on sphere, set of probability distribution, set of linearsystems.Using coordinate system {ξi} to express the point γ(t) on the curve(where t ∈I): γi(t) = ξi(γ(t)), then we get γ(t) = [γ1(t), · · · , γn(t)].
C∞CurvesC∞: infinitely many times differentiable(sufficiently smooth).If γ(t) is C∞ for t ∈ I, we call γ a C∞ on manifold S.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 17 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Tangent vector of Curves
A tangent vector is a vector that is tangent to a curve or surface at a givenpoint.When S is an open subset of Rn, the range of γ is contained within a singlelinear space, hence we consider the standard derivative:
γ(a) = limh→0
γ(a + h)− γ(a)
h(3)
In general, however, this is not true, ex: the range of γ in a color modelThus we use a more general ”derivative” instead:
γ(a) =
n∑i=1
γi(a)(∂
∂ξi )p (4)
where γi(t) = ξi ◦ γ(t), γi(a) = ddtγ
i(t)|t=a and ( ∂∂ξi )p is an operator which
maps f → ( ∂f∂ξi )p for given function f : S→ R.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 18 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Tangent space
Tangent spaceTangent space at p: a hyperplane Tp containing all the tangents of curvespassing through the point p ∈ S. (dim Tp(S) = dim S)
Tp(S) = {n∑
i=1
ci(∂
∂ξi )p|[c1, · · · , cn] ∈ Rn}
Examples: hemisphere and color
Figure : Tangent vector and tangent space in unit hemisphere
Yunshu Liu (ASPITRG) Introduction to Information Geometry 19 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Vector fields
Vector fieldsVector fields: a map from each point in a manifold S to a tangent vector.Consider a coordinate system {ξi} for a n-dimensional manifold, clearly∂i = ∂
∂ξi are vector fields for i = 1, · · · , n.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 20 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Basic concepts in differential geometry
Basic conceptsManifold and SubmanifoldTangent vector, Tangent space and Vector fieldRiemannian metric and Affine connectionFlatness and autoparallel
Yunshu Liu (ASPITRG) Introduction to Information Geometry 21 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Riemannian Metrics
Riemannian Metrics: an inner product of two tangent vectors(D and D′ ∈
Tp(S)) which satisfy 〈 D, D′ 〉p ∈ R, and the following condition hold:
Linearity : 〈aD + bD′,D′′〉p = a〈D,D′′〉p + b〈D′ ,D′′〉p
Symmetry : 〈D,D′〉p = 〈D′ ,D〉pPositive− definiteness : If D 6= 0 then 〈D,D〉p > 0
The components {gij} of a Riemannian metric g w.r.t. the coordinate system{ξi} are defined by gij = 〈 ∂i, ∂j 〉, where ∂i = ∂
∂ξi.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 22 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Riemannian Metrics
Examples of inner product:
For X = (x1, · · · , xn) and Y = (y1, · · · , yn), we can define inner productas 〈X,Y〉1 = X · Y =
∑ni=1 xiyi, or 〈X,Y〉2 = YMX, where M is any
symmetry positive-definite matrix.
For random variables X and Y, the expected value of their product:〈X,Y〉 = E(XY)
For square real matrix, 〈A,B〉 = tr(ABT)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 23 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Riemannian Metrics
For unit sphere:
x(ϕ, θ) = (sin ϕ cos θ, sin ϕ sin θ, cos ϕ), 0 < ϕ < π, 0 6 θ < 2π (5)
we have:
∂ϕ = (cos ϕ cos θ, cos ϕ sin θ,−sin ϕ)
∂θ = (−sin ϕ sin θ, sin ϕ cos θ, 0)
g11 = 〈∂ϕ, ∂ϕ〉, g22 = 〈∂θ, ∂θ〉g12 = g21 = 〈∂ϕ, ∂θ〉 = 〈∂θ, ∂ϕ〉
If we define 〈X,Y〉 = YMX = 2∑n
i=1 xiyi, where M =
(2 00 2
), then
(gi,j) =
(g11 g12g21 g22
)=
(2 00 2sin2ϕ
)(6)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 24 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Affine connection
Parallel translation along curvesLet γ: [a, b]→ S be a curve in S, X(t) be a vector field mapping each pointγ(t) to a tangent vector, if for all t ∈ [a, b] and the corresponding infinitesimaldt, the corresponding tangent vectors are linearly related, that is to say thereexist a linear mapping Πp,p′ , such that X(t + dt) = Πp,p′ (X(t)) for t ∈ [a, b],we say X is parallel along γ, and call Πγ the parallel translation along γ.Linear mapping: additivity and scalar multiplication.
Figure : Translation of a tangent vector along a curveYunshu Liu (ASPITRG) Introduction to Information Geometry 25 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Affine connection
Affine connection: relationships between tangent space at different points.Recall:
Natural basis of the coordinate system [ξi]: (∂i)p = ( ∂∂ξi )p: an operator
which maps f → ( ∂f∂ξi )p for given function f : S→ R at p.
Tangent space:
Tp(S) = {n∑
i=1
ci(∂
∂ξi )p|[c1, · · · , cn] ∈ Rn}
Tangent vector(elements in Tangent space) can be represented as linearcombinations of ∂i.
Tangent space Tp → Tangent vector Xp → Natural basis (∂i)p = ( ∂∂ξi )p
Yunshu Liu (ASPITRG) Introduction to Information Geometry 26 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Affine connection
If the difference between the coordinates of p and p′
are very small, that wecan ignore the second-order infinitesimals (dξi)(dξj), wheredξi = ξi(p
′)− ξi(p), then we can express difference between Πp,p′ ((∂j)p) and
((∂j)p′ ) as a linear combination of {dξ1, · · · , dξn}:
Πp,p′ ((∂j)p) = (∂j)p′ −∑i,k
(dξi(Γkij)p(∂k)p′ ) (7)
where {(Γkij)p; i, j, k = 1, · · · , n} are n3 numbers which depend on the point p.
From X(t) =∑n
i=1 Xi(t)(∂i)p and X(t + dt) =∑n
i=1(Xi(t + dt)(∂i)p′ ), wehave
Πp,p′ (X(t)) =∑i,j,k
({Xk(t)− dtγi(t)Xj(t)(Γkij)p}(∂k)p′ ) (8)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 27 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Affine connection
Πp,p′ ((∂j)p) = (∂j)p′ −∑i,k
(dξi(Γkij)p(∂k)p′ )
Yunshu Liu (ASPITRG) Introduction to Information Geometry 28 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Connection coefficients(Christoffel’s symbols): (Γkij)p
Given a connection on the manifold S, the value of (Γkij)p are different for
different coordinate systems, it shows how tangent vectors changes on amanifold, thus shows how basis vectors changes.In
Πp,p′ ((∂j)p) = (∂j)p′ −∑i,k
(dξi(Γkij)p(∂k)p′ )
if we let Γkij = 0 for i, j, k = x, y, we will have
Πp,p′ ((∂j)p) = (∂j)p′
Yunshu Liu (ASPITRG) Introduction to Information Geometry 29 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Connection coefficients(Christoffel’s symbols): (Γkij)p
Given a connection on a manifold S, Γki,j depend on coordinate system. Define
a connection which makes Γki,j to be zero in one coordinate system, we will
get non-zero connection coefficients in some other coordinate systems.
Example: If it is desired to let the connection coefficients for CartesianCoordinates of a 2D flat plane to be zero, Γk
ij = 0 for i, j, k = x, y, we cancalculate the connection coefficients for Polar Coordinates: Γϕrϕ = Γϕϕr = 1
r ,Γrϕϕ = −r, and Γk
ij = 0 for all others.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 30 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Connection coefficients(Christoffel’s symbols): (Γkij)p
Example(cont.):Now if we want to let the connection coefficients for Polar Coordinates to bezero, Γk
ij = 0 for i, j, k = r, ϕ, we can calculate the connection coefficients for
Polar Coordinates: Γxxx = − sin2 ϕ cosϕ
r , Γyxx = sinϕ(1+cos2 ϕ)
r ,
Γxxy = Γx
yx = − sin3 ϕr , Γy
xy = Γyyx = − cos3 ϕ
r , Γxyy = cosϕ(1+sin2 ϕ)
r , and
Γyyy = − sinϕ cos2 ϕ
r .
Yunshu Liu (ASPITRG) Introduction to Information Geometry 31 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Affine connection
Covariant derivative along curves
Derivative: dX(t)dt = limdt→0
X(t+dt)−X(t)dt , what if X(t) and X(t + dt) lie in
different tangent spaces? Xt(t + dt) = Πγ(t+dt),γ(t)(X(t + dt))
δX(t) = Xt(t + dt)− X(t) = Πγ(t+dt),γ(t)(X(t + dt))− X(t)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 32 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Affine connection
Covariant derivative along curves
We call δX(t)dt the covariant derivative of X(t):
δX(t)dt
= limdt→0
Xt(t + dt)− X(t)dt
=Πγ(t+dt),γ(t)(X(t + dt))− X(t)
dt(9)
Πγ(t+dt)(X(t + dt)) =∑i,j,k
({Xk(t + dt) + dtγi(t)Xj(t)(Γkij)γ(t)}(∂k)γ(t))(10)
δX(t)dt
=∑i,j,k
({Xk(t) + γi(t)Xj(t)(Γkij)γ(t)}(∂k)γ(t)) (11)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 33 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Affine connection
Covariant derivative of any two tangent vector
Covariant derivative of Y w.r.t. X, where X =∑n
i=1(Xi∂i) andY =
∑ni=1(Y i∂i):
∇XY =∑i,j,k
(Xi{∂iYk + Y jΓkij}∂k) (12)
∇∂i∂j =
n∑k=1
Γkij∂k (13)
Note: (∇XY)p = ∇XpY ∈ Tp(S)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 34 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Examples of Affine connection
metric connectionDefinition: If for all vector fields X,Y,Z ∈ T (S),
Z〈X,Y〉 = 〈∇ZX,Y〉+ 〈X,∇ZY〉.
where Z〈X,Y〉 denotes the derivative of the function 〈X,Y〉 along this vectorfield Z, we say that∇ is a metric connection w.r.t. g.Equivalent condition: for all basis ∂i, ∂j, ∂k ∈ T (S),
∂k〈∂i, ∂j〉 = 〈∇∂k∂i, ∂j〉+ 〈∂i,∇∂k∂i〉.
Property: parallel translation on a metric connection preserves inner products,which means parallel transport is an isometry.
〈Πγ(D1),Πγ(D2)〉q = 〈D1,D2〉p.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 35 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Examples of Affine connection
Levi-Civita connectionFor a given connection, when Γk
ij = Γkji hold for all i, j and k, we call it a
symmetric connection or torsion-free connection.From∇∂i∂j =
∑nk=1 Γk
ij∂k, we know for a symmetric connection:∇∂i∂j = ∇∂j∂i
If a connection is both metric and symmetric, we call it the Riemannianconnection or the Levi-Civita connection w.r.t. g.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 36 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Basic concepts in differential geometry
Basic conceptsManifold and SubmanifoldTangent vector, Tangent space and Vector fieldRiemannian metric and Affine connectionFlatness and autoparallel
Yunshu Liu (ASPITRG) Introduction to Information Geometry 37 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Flatness
Affine coordinate system
Let {ξi} be a coordinate system for S, we call {ξi} an affine coordinate systemfor the connection∇ if the n basis vector fields ∂i = ∂
∂ξi are all parallel on S.Equivalent conditions for a coordinate system to be an affine coordinatesystem:
∇∂i∂j =∑n
k=1(Γkij∂k) = 0 for all i and j (14)
Γkij = 0 for all i, j and k (15)
FlatnessS is flat w.r.t the connection∇: an affine coordinate system exist for theconnection∇.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 38 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Flatness
Examples:
∇∂i∂j =∑n
k=1(Γkij∂k) = 0 for all i and j
Γkij = 0 for all i, j and k
Yunshu Liu (ASPITRG) Introduction to Information Geometry 39 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Flatness
Curvature R and torsion T of a connection
R(∂i, ∂j)∂k =∑
l
(Rlijk∂l) and T(∂i, ∂j) =
∑k
(Tkij∂k) (16)
where Rlijk and Tk
ij can be computed in the following way:
Rlijk = ∂iΓ
ljk − ∂jΓ
lik + Γl
ihΓhjk − Γl
jhΓhik (17)
Tkij = Γk
ij − Γkji (18)
If a connection is flat, then T=R=0;If T= 0, Γk
ij = 0 for all i, j and k, we get the symmetry connnection.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 40 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Flatness
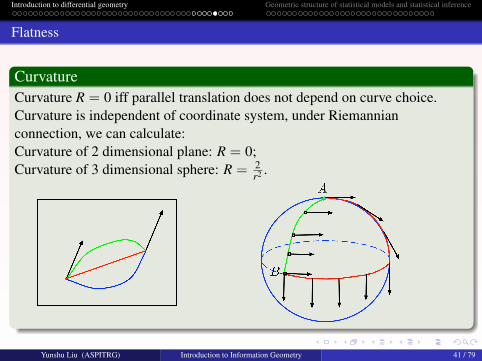
CurvatureCurvature R = 0 iff parallel translation does not depend on curve choice.Curvature is independent of coordinate system, under Riemannianconnection, we can calculate:Curvature of 2 dimensional plane: R = 0;Curvature of 3 dimensional sphere: R = 2
r2 .
Yunshu Liu (ASPITRG) Introduction to Information Geometry 41 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Autoparallel submanifold
Equivalent condition for a submanifold M of S to be autoparallel
∇XY ∈ T (M) for ∀X,Y ∈ T (M) (19)
∇∂a∂b ∈ T (M) for all a and b (20)
∇∂a∂b =∑
c
(Γcab∂c) (21)
where ∂a = ∂∂ua and ∂b = ∂
∂ub are the basis for submanifold M w.r.t.coordinate system {ui}.
Examples of autoparallel submanifold:Open subsets of manifold S are autoparallel;A curve with the properity that all the tangent vector are parallel
Yunshu Liu (ASPITRG) Introduction to Information Geometry 42 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Autoparallel submanifold
GeodesicsGeodesics(autoparallel curves): A curve with tangent vector transported byparallel translation.Examples under Riemannian connection:2 dimensional flat plane: straight line3 dimensional sphere: great circle
Yunshu Liu (ASPITRG) Introduction to Information Geometry 43 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Autoparallel submanifold
GeodesicsThe geodesics with respect to the Riemannian connection are known tocoincide with the shortest curve joining two points.Shortest curve: curve with the shortest length.Length of a curve γ : [a, b]→ S:
‖γ‖ =
∫ b
a‖dγ
dt‖dt =
∫ b
a
√gijγiγjdt (22)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 44 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Part II
Geometric structure of statistical models and statisticalinference
Yunshu Liu (ASPITRG) Introduction to Information Geometry 45 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Motivation
MotivationConsider the set of probability distributions as a manifold.
Analysis the relationship between the geometric structure of the manifold andstatistical estimation.
Introduce concepts like metric, affine connection on statistical models andstudying quantities such as distance, the tangent space (which provides linearapproximations), geodesics and the curvature of a manifold.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 46 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Statistical models
Statistical models
P(X ) = {p : X → R | p(x) > 0 (∀x ∈ X ),
∫p(x)dx = 1} (23)
Example Normal Distribution:
X = R, n = 2, ξ = [µ, σ],Ξ = {[µ, σ]| −∞ < µ <∞, 0 < σ <∞}
p(x, ξ) =1√2πσ
exp−(x− µ)2
2σ2
Yunshu Liu (ASPITRG) Introduction to Information Geometry 47 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Geometric structure of statistical models and statistical inference
Basic conceptsThe Fisher metric and α-connectionExponential familyDivergence and Geometric statistical inference
Yunshu Liu (ASPITRG) Introduction to Information Geometry 48 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
The Fisher information matrix
Fisher information matrix G(ξ) = [gi,j(ξ)], and
gi,j(ξ) = Eξ[∂i`ξ∂j`ξ] =
∫∂i`(x; ξ)∂j`(x; ξ)p(x; ξ)dx
where `ξ = `(x; ξ) = log p(x; ξ) and Eξ denotes the expectation w.r.t. thedistribution pξ.
Motivation:Sufficient statistic and Cramer-Rao bound
Yunshu Liu (ASPITRG) Introduction to Information Geometry 49 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
The Fisher information matrix
Sufficient statisticSufficient statistic: for Y = F(X), given the distribution p(x; ξ) of X, we havep(x; ξ) = q(F(x); ξ)r(x; ξ), if r(x; ξ) does not depend on ξ for all x, we saythat F is a sufficient statistic for the model S. Then we can writep(x; ξ) = q(y; ξ)r(x).A sufficient statistic is a function whose value contains all the informationneeded to compute any estimate of the parameter (e.g. a maximum likelihoodestimate).
Fisher information matrix and sufficient statisticLet G(ξ) be the Fisher information matrix of S = p(x; ξ), and GF(ξ) be theFisher information matrix of the induced model SF = q(y; ξ), then we haveGF(ξ) 6 G(ξ) in the sense that ∆G(ξ) = GF(ξ)− G(ξ) is positivesemidefinite. ∆G(ξ) = 0 iff. F is a sufficient statistic for S.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 50 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Cramer-Rao inequality
Cramer-Rao inequalityThe variance of any unbiased estimator is at least as high as the inverse of theFisher information.Unbiased estimator ξ: Eξ[ξ(X)] = ξ
The variance-covariance matrix Vξ[ξ] = [vijξ ] where
vijξ = Eξ[(ξi(X)− ξi)(ξj(X)− ξj)]
Thus Cramer-Rao inequality state that Vξ[ξ] > G(ξ)−1, and an unbiasedestimator ξ satisfying Vξ[ξ] = G(ξ)−1 is called an efficient estimator.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 51 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
α-connection
α-connection
Let S = {pξ} be an n-dimensional model, and consider the function Γ(α)ij,k
which maps each point ξ to the following value:
(Γ(α)ij,k )ξ = Eξ[(∂i∂j`ξ +
1− α2
∂i`ξ∂j`ξ)(∂k`ξ)] (24)
where α is an arbitrary real number. We defined an affine connection∇(α)
which satisfy: ⟨∇(α)∂i∂j, ∂k
⟩= Γ
(α)ij,k (25)
where g = 〈, 〉 is the Fisher metric. We call∇(α) the α-connection
Yunshu Liu (ASPITRG) Introduction to Information Geometry 52 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
α-connection
Properties of α-connectionα-connection is a symmetric connection
Relationship between α-connection and β-connection:
Γ(β)ij,k = Γ
(α)ij,k +
α− β2
E[∂i`ξ∂j`ξ∂k`ξ]
The 0-connection is the Riemannian connection with respect to theFisher metric.
Γ(β)ij,k = Γ
(0)ij,k +
−β2
E[∂i`ξ∂j`ξ∂k`ξ]
∇(α) =1 + α
2∇(1) +
1− α2∇(−1)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 53 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Geometric structure of statistical models and statistical inference
Basic conceptsThe Fisher metric and α-connectionExponential familyDivergence and Geometric statistical inference
Yunshu Liu (ASPITRG) Introduction to Information Geometry 54 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Exponential family
Exponential family
p(x; θ) = exp[C(x) +
n∑i=1
θiFi(x)− ψ(θ)]
[θi] are called the natural parameters(coordinates), and ψ is the potentialfunction for [θi], which can be calculated as
ψ(θ) = log∫
exp[C(x) +
n∑i=1
θiFi(x)]dx
The exponential families include many of the most common distributions,including the normal, exponential, gamma, beta, Dirichlet, Bernoulli,binomial, multinomial, Poisson, and so on.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 55 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Exponential family
Exponential familyExamples: Normal Distribution
p(x;µ, σ) =1√2πσ
e−(x−µ)2
2σ2 (26)
where C(x) = 0,F1(x) = x,F2(x) = x2, and θ1 = µσ2 , θ
2 = − 12σ2 are the
natural parameters, the potential function is :
ψ = −(θ1)2
4θ2 +12
log(− πθ2 ) =
µ2
2σ2 + log(√
2πσ) (27)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 56 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Mixture family
Mixture family
p(x; θ) = C(x) +
n∑i=1
θiFi(x)
In this case we say that S is a mixture family and [θi] are called the mixtureparameters.
e-connection and m-connectionThe natural parameters of exponential family form a 1-affine coordinatesystem(Γ(1)
ij,k = 0), which means the connection is 1-flat, we call theconnection∇(1) the e-connection, and call exponential family e-flat.The mixture parameters of mixture family form a (-1)-affine coordinatesystem(Γ(−1)
ij,k = 0), which means the connection is (-1)-flat, and we call theconnection∇(−1) the m-connection and call mixture family m-flat.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 57 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Dual connection
Dual connectionDefinition: Let S be a manifold on which there is given a Riemannian metricg and two affine connection∇ and ∇∗. If for all vector fields X,Y,Z ∈ T (S),
Z < X,Y >=< ∇ZX,Y > + < X,∇∗ZY > (28)
hold, we say that∇ and∇∗ are duals of each other w.r.t. g and call one thedual connection of the other.Additional, we call the triple (g,∇, ∇∗) a dualistic structure on S.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 58 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Dual connection
PropertiesFor any statistical model, the α-connection and the (−α)-connection aredual with respect to the Fisher metric.
〈Πγ(D1),Π∗γ(D2)〉q = 〈D1,D2〉p.
where Πγ and Π∗γ are parallel translation along γ w.r.t. ∇ and ∇∗.
R = 0⇔ R∗ = 0
where R and R∗ are the curvature tensors of∇ and ∇∗.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 59 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Dually flat spaces and dual coordinate system
Dually flat spacesLet (g,∇,∇∗) be a dualistic structure on a manifold S, then we haveR = 0⇔ R∗ = 0, and if the connnection∇ and ∇∗ are bothsymmetric(T = T∗ = 0), then we see that∇-flatness and∇∗-flatness areequivalent.We call (S, g,∇,∇∗) a dually flat space if both duals∇ and∇∗ are flat.Examples: Since α-connections and −α-connections are dual w.r.t. Fishermetric and α-connections are symmetry, we have for any statistical model Sand for any real number α
S is α− flat⇔ S is (−α)− flat (29)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 60 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Dually flat spaces and dual coordinate system
Dual coordinate system
For a particular∇-affine coordinate system [θi], if we choose a corresponding∇∗-affine coordinate system [ηj] such that
g = 〈∂i, ∂j〉 = δj
i
where ∂i = ∂∂θi and ∂j = ∂
∂ηj.
Then we say the two coordinate systems mutually dual w.r.t. metric g, andcall one the dual coordinate system of the other.
Existence of dual coordinate systemA pair of dual coordinate system exist if and only if (S, g,∇,∇∗) is a duallyflat space.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 61 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Legendre transformations
Consider mutually dual coordinate system [θi] and [ηi] with functionsψ : S→ R and ϕ : S→ R satisfy the following equations:
∂iψ = ηi
∂iϕ = θi
gi,j = ∂iηj = ∂jηi = ∂i∂jψ
ϕ(η) = maxθ{θiηi − ψ(θ)}ψ(θ) = maxη{θiηi − ϕ(η)}
Yunshu Liu (ASPITRG) Introduction to Information Geometry 62 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Legendre transformations
Geometric interpretation forf ∗(p) = maxx(px− f (x)):A convex function f (x) is shown in red, andthe tangent line at point (x0, f (x0)) is shownin blue. The tangent line intersects thevertical axis at (0,−f ∗) and f ∗ is the value ofthe Legendre transform f ∗(p0), wherep0 = f (x0). Note that for any other point onthe red curve, a line drawn through that pointwith the same slope as the blue line will havea y-intercept above the point (0,−f ∗),showing that is indeed a maximum.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 63 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Examples of Legendre transformations
Examples:
The Legendre transform of f (x) = 1p |x|
p (where 1 < p <∞) isf ∗(x∗) = 1
q |x∗|q (where 1 < q <∞),
The Legendre transform of f (x) = ex is f ∗(x∗) = x∗ln x∗ − x∗ (wherex∗ > 0),
The Legendre transform of f (x) = 12 xTAx is f ∗(x∗) = 1
2 x∗TA−1x∗,
The Legendre transform of f (x) = |x| is f ∗(x∗) = 0 if x∗ 6 1, andf ∗(x∗) =∞ if x∗ > 1.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 64 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
The natural parameter and dual parameter of Exponential family
For distribution p(x; θ) = exp[C(x) +∑n
i=1 θiFi(x)− ψ(θ)], [θi] are
called the natural parameters
If we define ηi = Eθ[Fi] =∫
Fi(x)p(x; θ)dx, we can verify [ηi] is a(-1)-affine coordinate system dual to [θi], we call this [ηi] the expectationparameters or the dual parameters.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 65 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
The natural parameter and dual parameter of Exponential family
Recall: Normal Distribution
p(x;µ, σ) =1√2πσ
e−(x−µ)2
2σ2 (30)
where C(x) = 0,F1(x) = x,F2(x) = x2, and θ1 = µσ2 , θ
2 = − 12σ2 are the
natural parameters, the potential function is :
ψ = −(θ1)2
4θ2 +12
log(− πθ2 ) =
µ2
2σ2 + log(√
2πσ) (31)
The dual parameter are calculated as η1 = ∂ψ∂θ1 = µ = − θ1
2θ2 ,
η2 = ∂ψ∂θ2 = µ2 + σ2 = (θ1)2−2θ2
4(θ2)2 , It has potential function:
ϕ = −12
(1 + log(− πθ2 )) = −1
2(1 + log(2π)) + 2logσ) (32)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 66 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Geometric structure of statistical models and statistical inference
Basic conceptsThe Fisher metric and α-connectionExponential familyDivergence and Geometric statistical inference
Yunshu Liu (ASPITRG) Introduction to Information Geometry 67 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Divergences
Let S be a manifold and suppose that we are given a smooth functionD = D(·‖·) : S× S→ R satisfying for any p, q ∈ S:
D(p‖q) > 0 with equality iff . p = q) (33)
Then we introduce a distance-like measure of the separation between twopoints.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 68 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Divergence, semimetrics and metrics
A distance satisfying positive-definiteness, symmetry and triangleinequality is called a metric;
A distance satisfying positive-definiteness and symmetry is calledsemimetrics;
A distance satisfying only positive-definiteness is called a divergence.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 69 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Kullback-Leibler divergence
Discrete random variables p and q:
DKL(p‖q) =∑
i
p(x)logp(x)
q(x)(34)
Continuous random variables p and q:
DKL(p‖q) =
∫p(x)log
p(x)
q(x)dx (35)
Generally , we use Kullback-Leibler divergence to measurethe differencebetween two probability distributions p and q. KL measures the expectednumber of extra bits required to code samples from p when using a codebased on q, rather than using a code based on p. Typically p represents the”true” distribution of data, observations, or a precisely calculated theoreticaldistribution. The measure q typically represents a theory, model, description,or approximation of p.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 70 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Bregman divergence
Bregman divergence associatedwith F for points p, q ∈ ∆ is :BF(x‖y) =F(y)−F(x)− 〈(y− x),∇F(x)〉,where F(x) is a convex functiondefined on a closed convex set∆.
Examples:F(x) = ‖x‖2, then BF(x‖y) = ‖x− y‖2.More generally, if F(x) = 1
2 xTAx, then BF(x‖y) = 12(x− y)TA(x− y).
KL divergence:if F =∑
i x logx−∑
x, we get KullbackLeibler divergence.
Yunshu Liu (ASPITRG) Introduction to Information Geometry 71 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Canonical divergence
Canonical divergence(a divergence for dually flat space)
Let (S, g,∇,∇∗) be a dually flat space, and {[θi], [ηj]} be mutually dual affinecoordinate systems with potentials {ψ,ϕ}, then the canonicaldivergence((g,∇)− divergence) is defined as:
D(p‖q) = ψ(p) + ϕ(q)− θi(p)ηj(q) (36)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 72 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Canonical divergence
Properties:Relation between (g,∇)− divergence and (g,∇∗)− divergence:D∗(p‖q) = D(q‖p)
If M is a autoparallel submanifold w.r.t. either∇ or ∇∗, then the(gM,∇M)-divergence DM = D|M×M is given by DM(p‖q) = D(p‖q)
If ∇ is a Riemannian connection(∇ = ∇∗) which is flat on S, there exista coordinate system which is self-dual(θi = ηi), thenϕ = ψ = 1
2∑
i(θi)2, then the canonical divergence is
D(p‖q) =12{d(p, q)}2
where d(p, q) =√∑
i{θi(p)− θi(q)}2
Yunshu Liu (ASPITRG) Introduction to Information Geometry 73 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Canonical divergence
Triangular relation
Let {[θi], [ηi]} be mutually dual affine coordinate systems of a dually flatspace (S, g,∇,∇∗), and let D be a divergence on S. Then a necessary andsufficient condition for D to be the (g,∇)-divergence is that for all p, q, r ∈ Sthe following triangular relation holds:
D(p‖q) + D(q‖r)− D(p‖r) = {θi(p)− θi(q)}{ηi(p)− ηi(q)} (37)
Yunshu Liu (ASPITRG) Introduction to Information Geometry 74 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Canonical divergence
Pythagorean relationLet p, q, and r be three points in S. Let γ1 be the∇-geodesic connecting p andq, and let γ2 be the∇∗-geodesic connecting q and r. If at the intersection q thecurve γ1 and γ2 are orthogonal(with respect to the inner product g), then wehave the following Pythagorean relation.
D(p‖r) = D(p‖q) + D(q‖r) (38)
Figure :Yunshu Liu (ASPITRG) Introduction to Information Geometry 75 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Canonical divergence
Projection theoremLet p be a point in S and let M be a submanifold of S which is∇∗-autoparallel. Then a necessary and sufficient condition for a point q in Mto satisfy
D(p‖q) = minr∈MD(p‖r) (39)
is for the∇-geodesic connecting p and q to be orthogonal to M at q.
Figure :Yunshu Liu (ASPITRG) Introduction to Information Geometry 76 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Canonical divergence
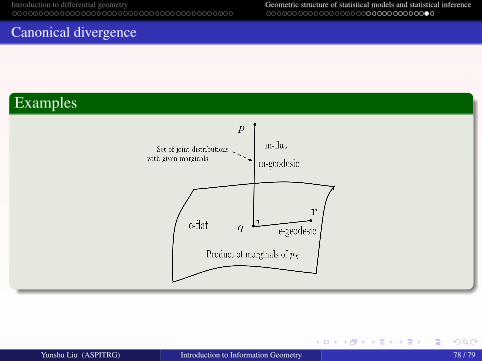
ExamplesFrom the definition of exponential family and mixture family, the product ofexponential family are still exponential family, the sum of mixture family arestill mixture family.
e-flat submanifold: set of all product distributions:E0 = {pX|pX(x1, · · · , xN) =
∏Ni=1 pXi(xi)}
m-flat submanifold: set of joint distributions with given marginals:M0 = {pX|
∑X\i pX(x) = qi(xi) ∀i ∈ {1, · · · ,N}}
Yunshu Liu (ASPITRG) Introduction to Information Geometry 77 / 79
Introduction to differential geometry Geometric structure of statistical models and statistical inference
Canonical divergence
Examples
Yunshu Liu (ASPITRG) Introduction to Information Geometry 78 / 79

Introduction to differential geometry Geometric structure of statistical models and statistical inference
Thanks!
Thanks!Question?
Yunshu Liu (ASPITRG) Introduction to Information Geometry 79 / 79