introduction to serial i/ocs5780/lectures/09_5780_l17_2up.pdf · – e.g. max232, mc145407 chips »...
TRANSCRIPT

Page 1
1 CS 5780 School of Computing University of Utah
CS/ECE 6780/5780
Al Davis
Today’s topics:
• Serial I/O
• general concepts in preparation for Lab 8
2 CS 5780 School of Computing University of Utah
Introduction to Serial I/O

Page 2
3 CS 5780 School of Computing University of Utah
A Serial Channel
4 CS 5780 School of Computing University of Utah
Definitions
Page 3
5 CS 5780 School of Computing University of Utah
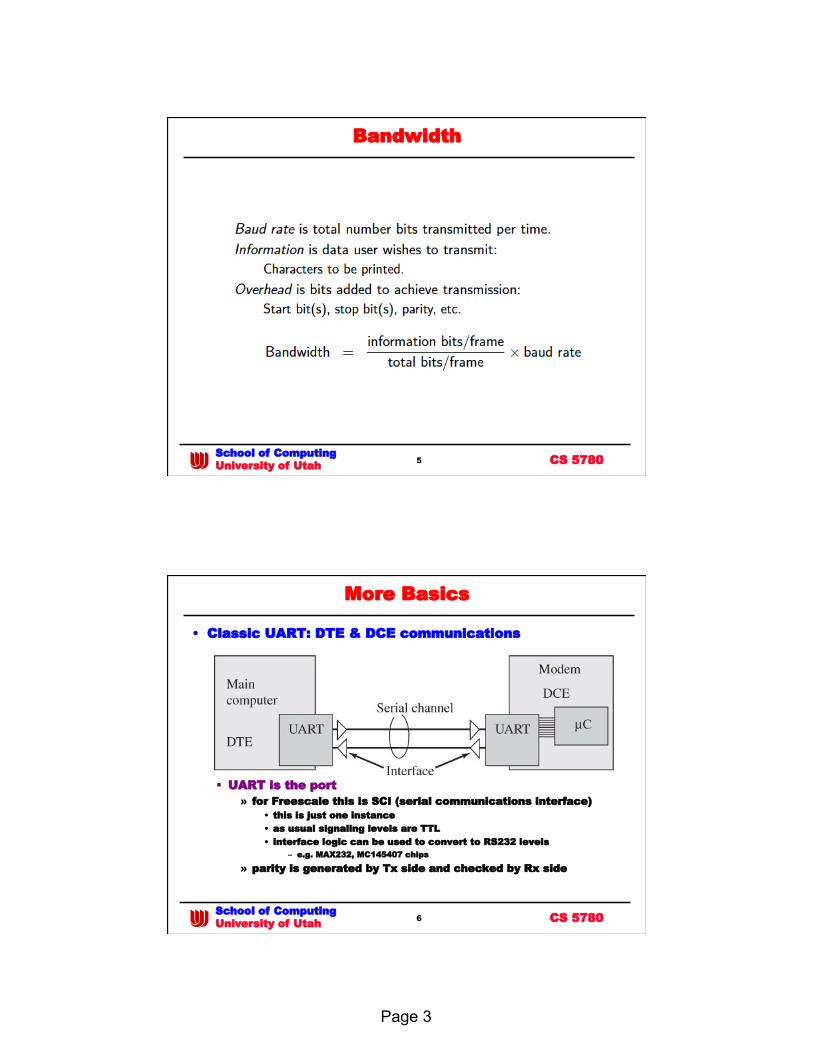
Bandwidth
6 CS 5780 School of Computing University of Utah
More Basics
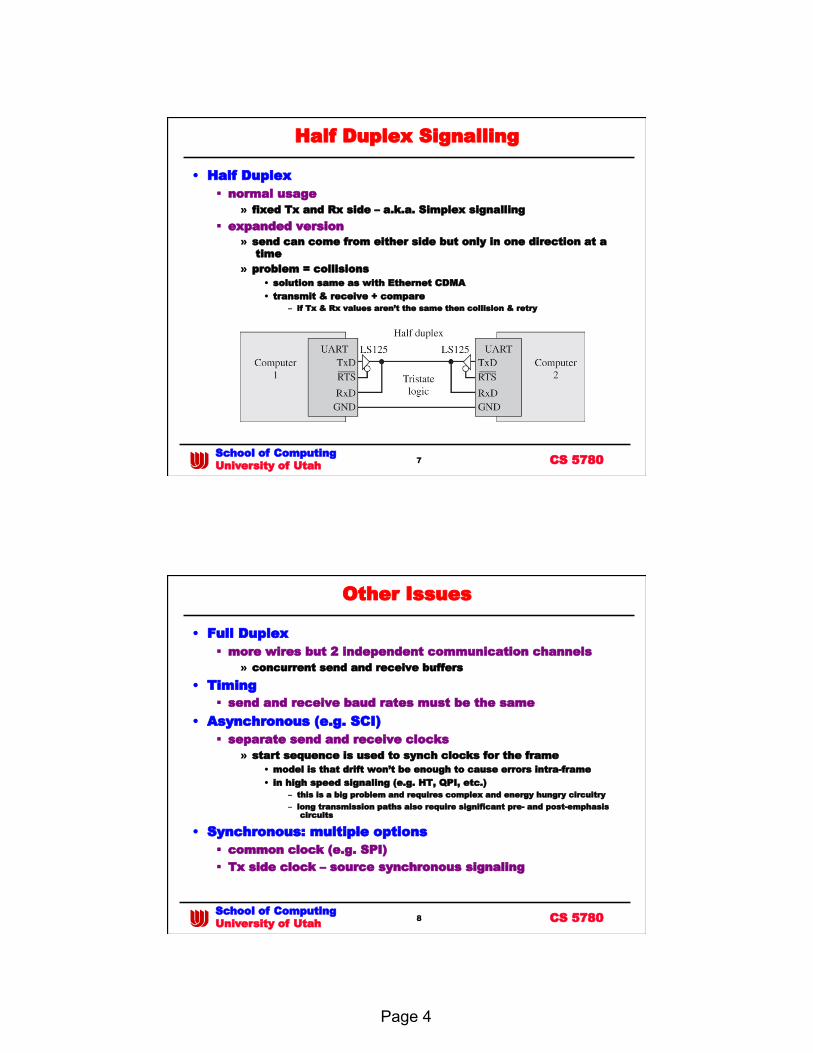
• Classic UART: DTE & DCE communications
UART is the port » for Freescale this is SCI (serial communications interface)
• this is just one instance
• as usual signaling levels are TTL
• interface logic can be used to convert to RS232 levels – e.g. MAX232, MC145407 chips
» parity is generated by Tx side and checked by Rx side
Page 4
7 CS 5780 School of Computing University of Utah
Half Duplex Signalling
• Half Duplex normal usage
» fixed Tx and Rx side – a.k.a. Simplex signalling
expanded version » send can come from either side but only in one direction at a
time
» problem = collisions • solution same as with Ethernet CDMA
• transmit & receive + compare – if Tx & Rx values aren’t the same then collision & retry
8 CS 5780 School of Computing University of Utah
Other Issues
• Full Duplex more wires but 2 independent communication channels
» concurrent send and receive buffers
• Timing send and receive baud rates must be the same
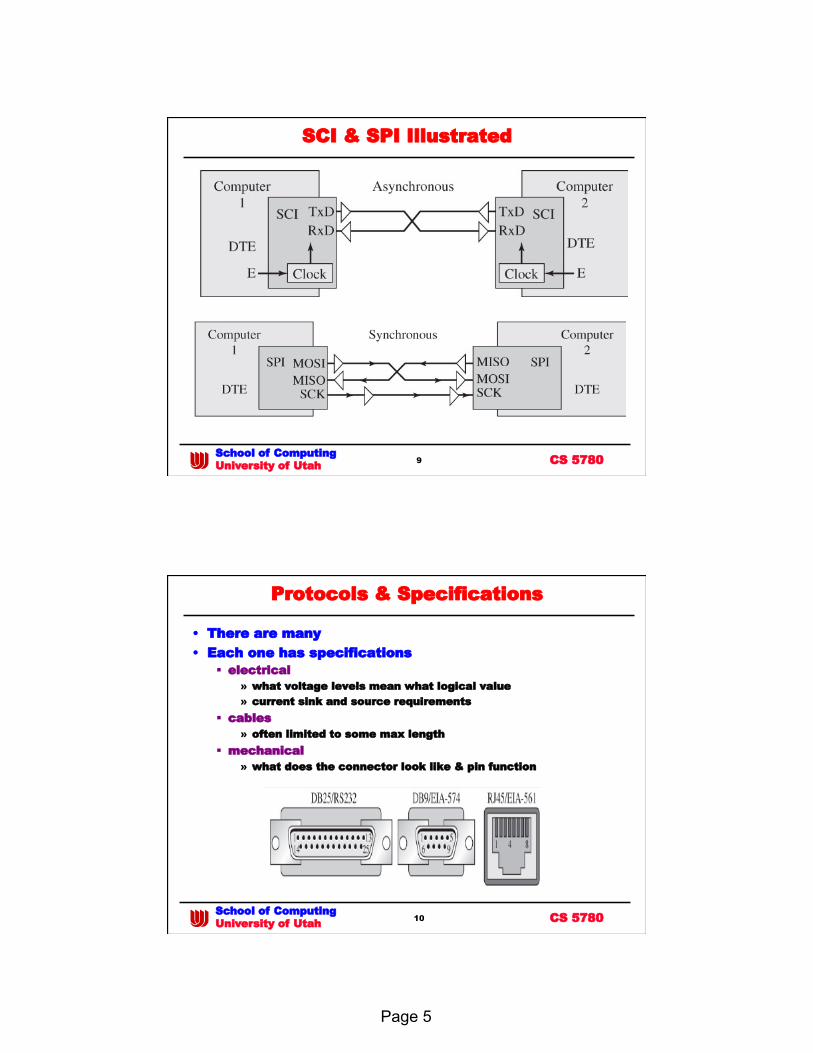
• Asynchronous (e.g. SCI) separate send and receive clocks
» start sequence is used to synch clocks for the frame • model is that drift won’t be enough to cause errors intra-frame
• in high speed signaling (e.g. HT, QPI, etc.) – this is a big problem and requires complex and energy hungry circuitry
– long transmission paths also require significant pre- and post-emphasis circuits
• Synchronous: multiple options common clock (e.g. SPI)
Tx side clock – source synchronous signaling
Page 5
9 CS 5780 School of Computing University of Utah
SCI & SPI Illustrated
10 CS 5780 School of Computing University of Utah
Protocols & Specifications
• There are many
• Each one has specifications electrical
» what voltage levels mean what logical value
» current sink and source requirements
cables » often limited to some max length
mechanical » what does the connector look like & pin function

Page 6
11 CS 5780 School of Computing University of Utah
2 Common Freescale Options
Simple SCI
SCI to RS232 conversion
12 CS 5780 School of Computing University of Utah
RS232 Output Specifications

Page 7
13 CS 5780 School of Computing University of Utah
RS232 DB9 Pin Assignments
14 CS 5780 School of Computing University of Utah
A Simple Serial Network
Page 8
15 CS 5780 School of Computing University of Utah
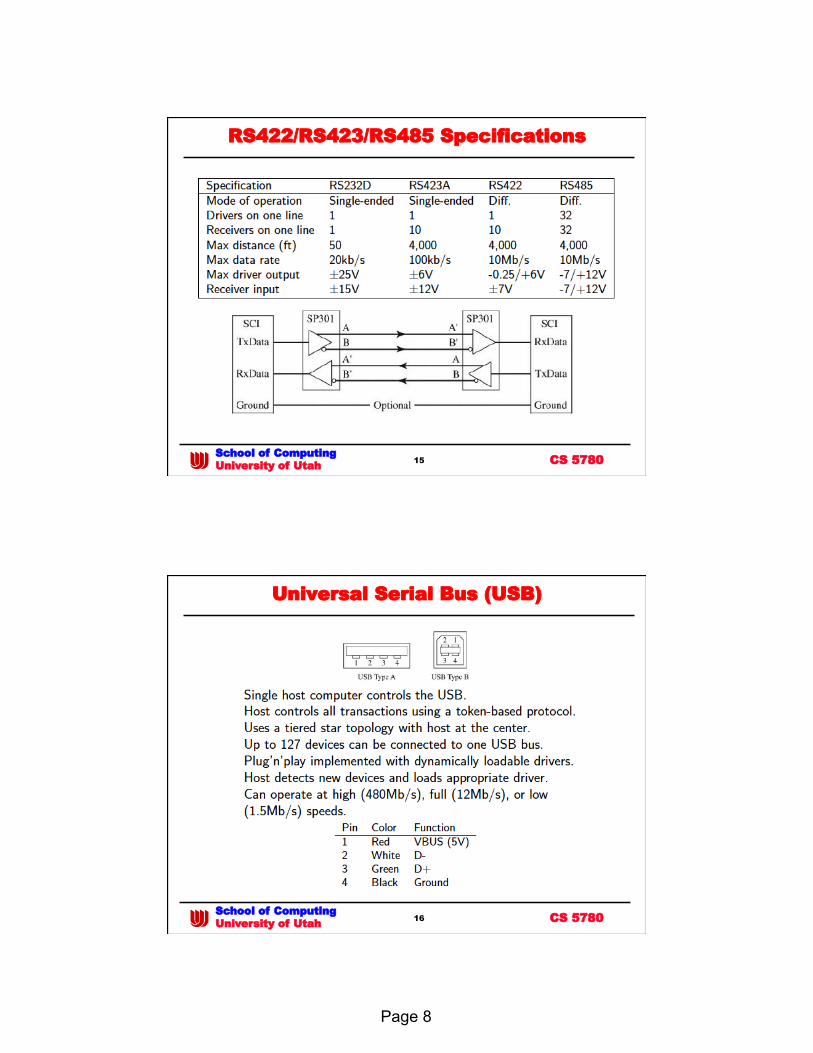
RS422/RS423/RS485 Specifications
16 CS 5780 School of Computing University of Utah
Universal Serial Bus (USB)

Page 9
17 CS 5780 School of Computing University of Utah
Optical SCI Channel
Where & Why would you want to do this?
18 CS 5780 School of Computing University of Utah
SCI

Page 10
19 CS 5780 School of Computing University of Utah
Transmitting in Asynchronous Mode
20 CS 5780 School of Computing University of Utah
Control Bits for the Transmitter
NOTE: Tx Data Reg Empty (TDRE) flag signals that the SCDR register is empty, TDRE is cleared by reading it. Different from previous flag clearing methods where you had to write a 1 to the flag. Read of TC flag (transmit complete) similarly clears it Then write to the SCDR

Page 11
21 CS 5780 School of Computing University of Utah
Transmission Illustrated
22 CS 5780 School of Computing University of Utah
Pseudo Code for Transmission Process
Page 12
23 CS 5780 School of Computing University of Utah
Receiving in Asynchronous Mode
24 CS 5780 School of Computing University of Utah
Control Bits for the Receiver
Page 13
25 CS 5780 School of Computing University of Utah
Status Bits Generated by the Receiver
26 CS 5780 School of Computing University of Utah
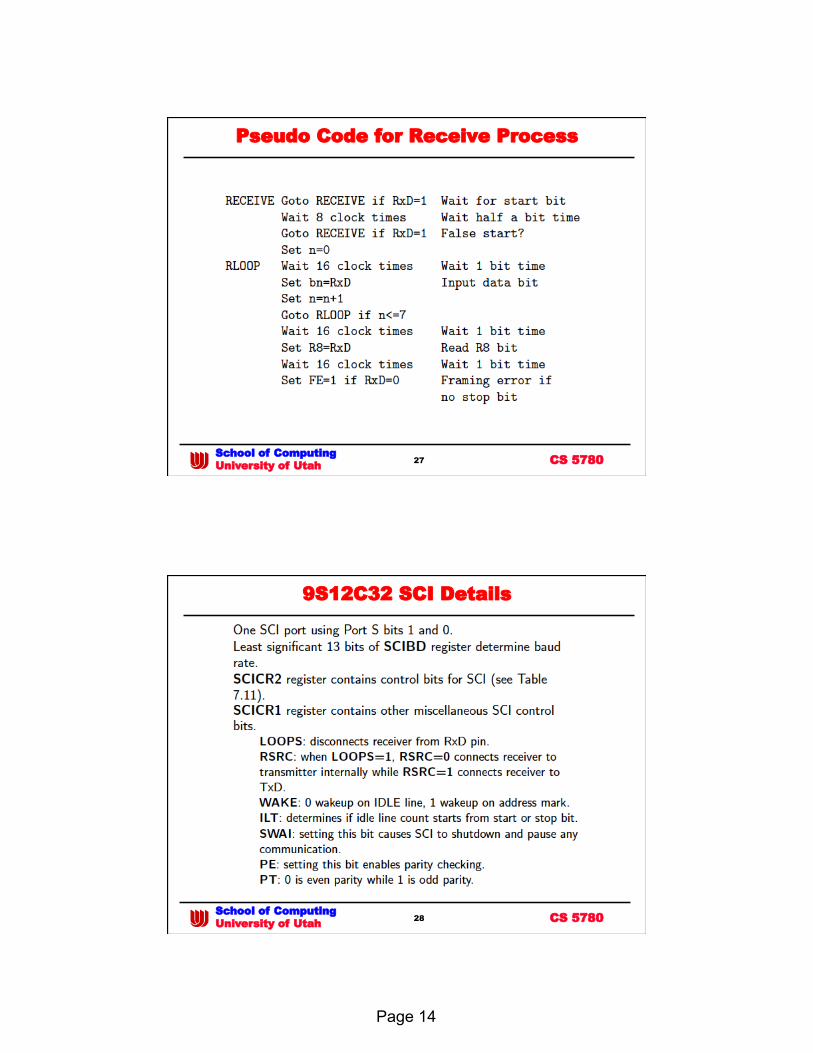
Receiving Illustrated
Page 14
27 CS 5780 School of Computing University of Utah
Pseudo Code for Receive Process
28 CS 5780 School of Computing University of Utah
9S12C32 SCI Details

Page 15
29 CS 5780 School of Computing University of Utah
More SCI Details
30 CS 5780 School of Computing University of Utah
SCI I/O Interrupts
Page 16
31 CS 5780 School of Computing University of Utah
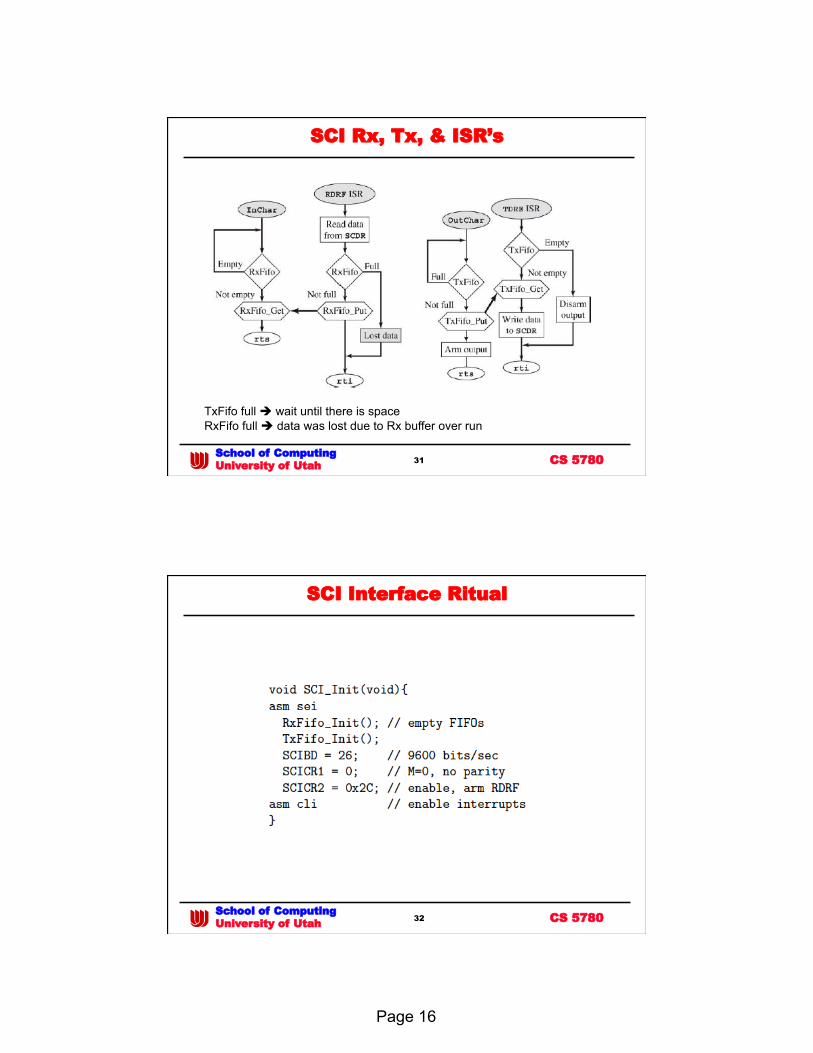
SCI Rx, Tx, & ISR’s
TxFifo full wait until there is space RxFifo full data was lost due to Rx buffer over run
32 CS 5780 School of Computing University of Utah
SCI Interface Ritual

Page 17
33 CS 5780 School of Computing University of Utah
SCI Interface ISR
34 CS 5780 School of Computing University of Utah
SCI In/Out Character
Page 18
35 CS 5780 School of Computing University of Utah
Serial Port Printer Interfaces
Note: 2 approaches DTR is a handshake saying send me another frame Xoff is a shut up signal – more efficient for larger buffers but some timing complexity for on the fly & response time issues
36 CS 5780 School of Computing University of Utah
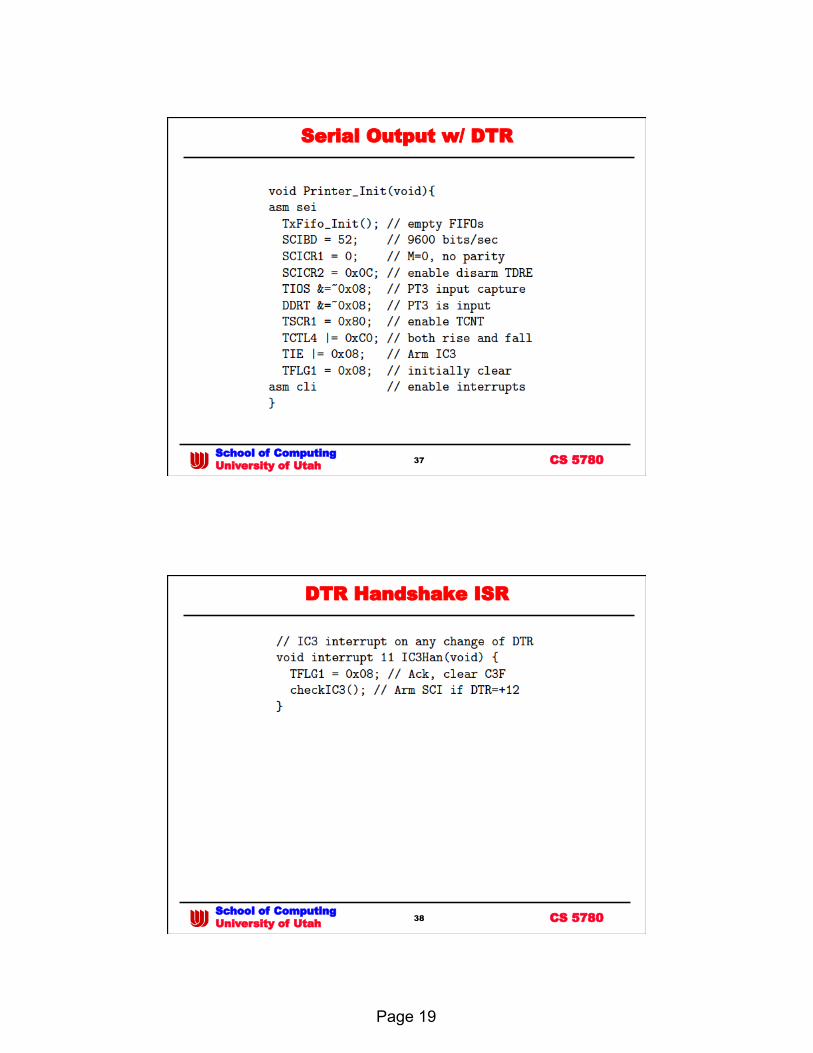
SCI Simplex Printer Interface (w/ DTR handshake)
Page 19
37 CS 5780 School of Computing University of Utah
Serial Output w/ DTR
38 CS 5780 School of Computing University of Utah
DTR Handshake ISR
Page 20
39 CS 5780 School of Computing University of Utah
Serial Output to Printer
40 CS 5780 School of Computing University of Utah
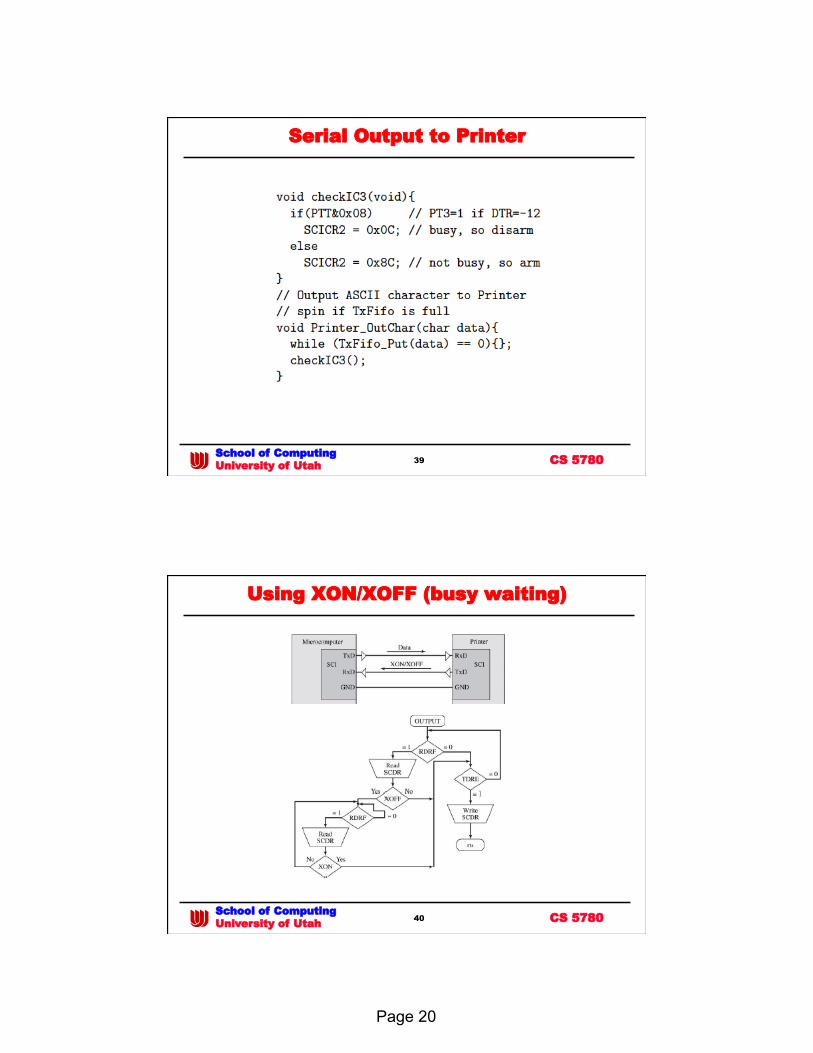
Using XON/XOFF (busy waiting)

Page 21
41 CS 5780 School of Computing University of Utah
Synchronous = SPI (3 options)
42 CS 5780 School of Computing University of Utah
SPI Master/Slave Example
Page 22
43 CS 5780 School of Computing University of Utah
SPI Fundamentals
44 CS 5780 School of Computing University of Utah
More SPI Fundamentals
Mode fault occurs when master and slave synchronization is wrong – e.g. 2 masters

Page 23
45 CS 5780 School of Computing University of Utah
SPI Pseudo Code
46 CS 5780 School of Computing University of Utah
SPI Modes
CPOL sets SCLK polarity – e.g. what is IDLE
CPHA sets even or odd clock edges for the receiver shift register
Page 24
47 CS 5780 School of Computing University of Utah
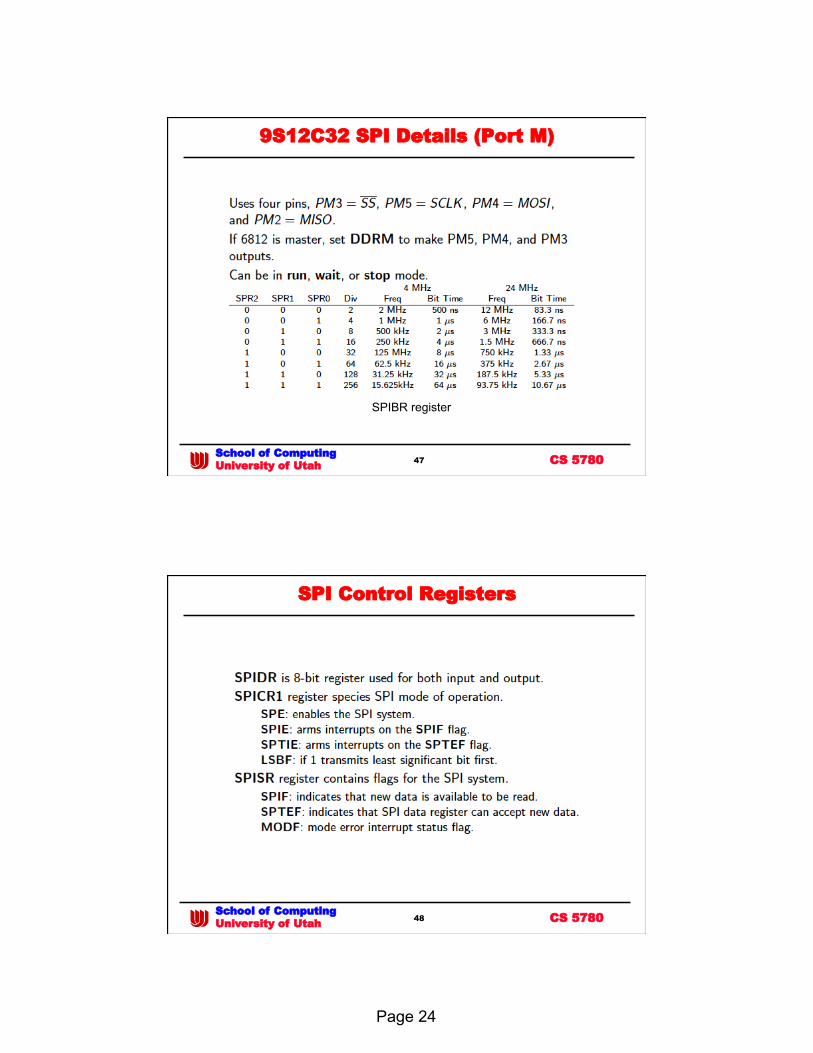
9S12C32 SPI Details (Port M)
SPIBR register
48 CS 5780 School of Computing University of Utah
SPI Control Registers

Page 25
49 CS 5780 School of Computing University of Utah
SPI Modes
50 CS 5780 School of Computing University of Utah
SPI Mode Selections
Page 26
51 CS 5780 School of Computing University of Utah
Concluding Remarks
• Serial I/O is very common USB is obviously everywhere
SPI & SCI are more prevalent in embedded systems » primarily because it’s low cost
» most controllers support this • your kits support both
» difference is synch vs. asynch
• Too much detail already but advise that you take a look at the DAC application we’ll go through the full SCI ritual next lecture
» in prep for Lab 8
• SPRING BREAK hope you have some fun
hope I can catch up