inverse kinematics problem: input: the desired position and orientation of the tool output: the set...
Post on 19-Dec-2015
222 views
TRANSCRIPT
Inverse Kinematics
Problem:
Input: the desired position and orientation of the tool
Output: the set of joints parameters

Dextrous workspace – the volume ofspace which the robot end-effectorcan reach with all orientations
Reachable workspace – the volume of space which the robot end-effector can reach in at least one orientation
If L1=L2 then the dextrous space = {origin} and the reachable space = full disc of radius 2L1
If then the dextrous space is empty and the reachable space is a ring bounded by discusses with radiuses |L1- L2| and L1+L2
The dextrous space is a subset of the reachable space
Workspaces
21 LL

Solutions A manipulator is solvable if an algorithm can determine the
joint variables. The algorithm should find all possible solutions.
There are two kinds of solutions: closed-form and numerical (iterative)
• Numerical solutions are in general time expensive
We are interested in closed-form solutions:
• Algebraic Methods
• Geometric Methods

Kinematics equations of this arm:
The structure of the transformation:
Algebraic Solution
1000
0.00.10.00.0
0.0
0.0
12211123123
12211123123
03
slslcs
clclsc
TTBW
1000
0.00.10.00.0
0.0
0.0
ycs
xsc
TBW

We are interested in x, y, and (of the end-effector) By comparison of the two matrices above we obtain:
And by further manipulations:
and ……
Algebraic Solution (cont.)
12211
12211
123
123
slsly
clclx
ss
cc
21
22
21
22
2 2 ll
llyxc
222 1 cs

Algebraic Solution by Reduction to Polynomial
2
2
2
1
2sin
1
1cos
2tan
u
uu
u
u
The actual variable is u :

Example 1
1 0 0 L1
2 L2 0
3 0 0
1i1ia id I
190 902 90 3d

Kinematic Equations of The Arm
1000
L100
00cs
00sc
T1
11
11
01
1000
00sc
0100
L0cs
T22
222
12
1000
0010
d100
0001
T 323
1000
sdLs0c
csdsLcscss
ccdcLccssc
T23122
2131221121
2131221111
03
22
11
c)cos(
)cos(
c

Target
By comparison we get:
1000z
y
x
RT ),,(B
W
231
21312
21312
sdLz
csdsLy
ccdcLx

Kinematic Equations - Solution
)cdL(yx)cdL(yx 232222
23222
)arctan(tg xy
1xy
1
123
222
23
Lzsd
Lyxcd
))Lz()Lyx(d 21
22
223
23
23
2
2
cd
sd
cs
2 )tan(

Example 2
1i1ia id I
1
90 2
3
1 0 0 L1
2 0 0
3 L2 0 0
4 L3 0 04

Example 2 (cont.)
1000
0100
00cs
00sc
T 11
11
01
1000
00cs
0100
00sc
T22
22
12
1000
0100
00cs
L0sc
T 33
233
23
1000
0100
00cs
L0sc
T 44
344
34
1000
0100
0010
L001
T
4
4EE

Example 2 (cont.)
1000
sLsLsL0cs
csLcsLcsL
ccLccLccL
T234423322234234
234142313212
234142313212
0EE
1000
z0cs
y
x
T0EE
0ZZ
cZY
sZX
0EE
0EE
0EE
)3(
)2(
)1(
234423322
2344233221
2344233221
sLsLsLz
cLcLcLsy
cLcLcLcx
(*)234
234
ss
cc
Example 2 (cont.)
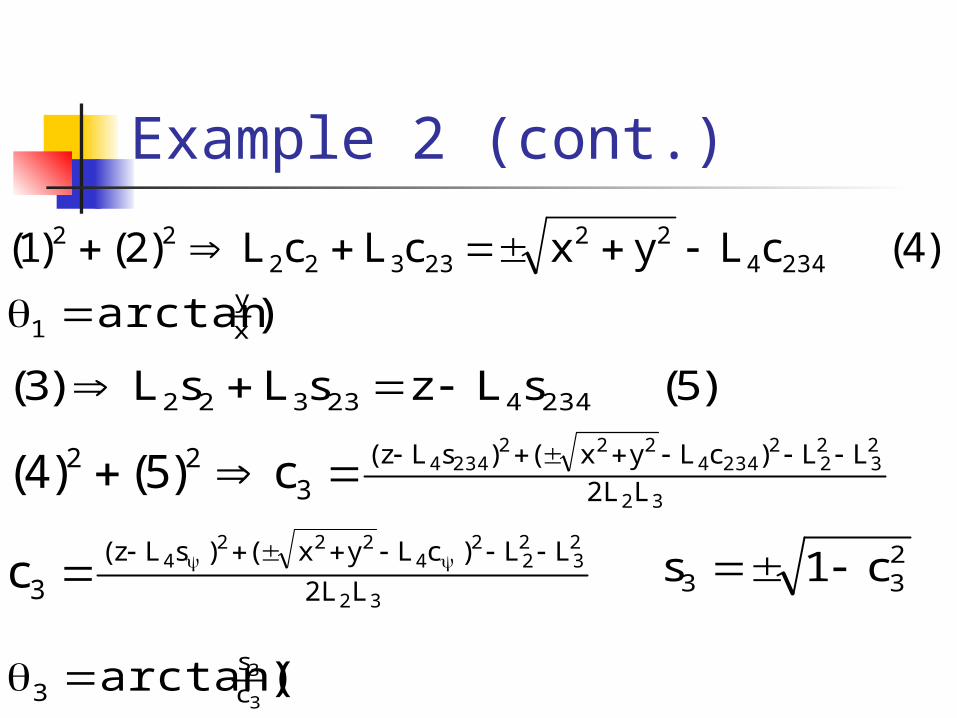
)arctan( xy
1
)4(cLyxcLcL)2()1( 234422
2332222
)5(sLzsLsL)3( 234423322
32
23
22
22344
2222344
LL2
LL)cLyx()sLz(3
22 c)5()4(
32
23
22
24
2224
LL2
LL)cLyx()sLz(
3c
)arctan(3
3
cs
3
233 c1s

Example 2 (cont.)
332
33
1
2
arctan
arctan2
cLLsLll
cLyxcLcLl 422
233221
sLzsLsLl 4233222
(*)),,( 324 f
ba
)sin()sin(
Lllo
3
2/12
2
2
133
)(*)sin()180sin()sin(