jean ann - frequency of occurrence and ease of articulation of sign language handshapes - the...
DESCRIPTION
Jean Ann - Frequency of occurrence and ease of articulation of Sign Language Handshapes - The Taiwanese example.pdfTRANSCRIPT


Frequency of Occurrence and Ease ofArticulation of Sign Language Handshapes
FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page i

FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page ii

Frequency ofOccurrence and Ease ofArticulation ofSign Language Handshapes
The Taiwanese Example
Jean Ann
Gallaudet University PressWashington, D.C.
FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page iii

Gallaudet University PressWashington, D.C. 20002http://gupress.gallaudet.edu© 2006 by Gallaudet University
All rights reservedPublished in 2006Printed in the United States of America
Library of Congress Cataloging-in-Publication Data
Ann, JeanFrequency of occurrence and ease of articulation of sign language handshapes :
the Taiwanese example / Jean Ann.p. cm.
Includes bibliographical references and index.ISBN 1-56368-288-5 (alk. paper)
1. Taiwan Sign Language. I. Title.HV2474.A55 2000419'.51249—dc22 2006010157
The paper used in this publication meets the minimum requirements ofAmerican National Standard for Information Sciences—Permanence of Paper forPrinted Library Materials, ANSI Z39.48-1984.
��
FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page iv

To my mother, Marian Jeanne Savoca Griffin, and the memoryof my father, Patrick Joseph Griffin. From the first time I insistedon reading them The Cat in the Hat all by myself, I have loved language.Their stoking of that fire eventually led me to become a linguist.
And to my parents-in-law, Zhang Da-yin and Peng Jin-de, who teachme, ever so gently, about language and living in a foreign land with dig-nity and courage.
I honor them all for what they have given me, and for what theykeep letting me believe I can do.
FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page v

FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page vi

Contents
Acknowledgments ix
Chapter One Contextualizing this Book 1
Chapter Two The Anatomy and Physiology 56of the Human Hand
Chapter Three A Model of Ease of 87Handshape Articulation
Chapter Four Ease and Frequency Compared 139
Conclusion 181
References 191
Index 205
vii
FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page vii

FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page viii
Acknowledgments
About fifteen years ago, I read four things that rocked my world: a then-unpublished paper by David Corina and Elizabeth Sagey, Mark Mandel’sdissertation, drafts of Grounded Phonology by Diana Archangeli andDoug Pulleyblank, and some of the work of John Ohala. Since then,the idea of articulation of handshapes has bothered me night and day. Iended up writing a 1993 dissertation on the topic. Perhaps I should haveleft it at that, but I didn’t. This book is a much-revised and updated ver-sion of my dissertation.
Doing this project gave me chances to live in places from southernTaiwan to central New York and to work with a delightful array of bothlinguists and regular people. The clearest way to express my gratitudeto the many who have supported me as I wrote this book is to tell thestories of my encounters with each. But because those stories are anotherbook, it will have to suffice to reduce the stories to names and a fewwords of thanks and praise. I hope I have thanked everyone who helpedme; for anyone I have inadvertently left out, I offer apologies and thanks.
At the University of Arizona, first and foremost, Mike Hammondgave me the space to try to think about functional questions in a formaldepartment. If he had not let me be where I was, I would not have beenable to begin this journey. Diana Archangeli’s careful attention to mywriting and analysis was a gift. Sam Supalla’s insights about sign lan-guages and his willingness to make time for me were invaluable. I wasencouraged by Doug Saddy, Wendy Wiswall, Tom Bourgeois, Masahide
ix
FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page ix
Ishihara, David Basilico, Raquel Mejia, Jorge Lemus, Lee Fulmer,Carol Braithwaite, Husni Muadz, Larry Hagberg, Steven Zepp, ChipGerfen, Pilar Piñar, Laura Conway, Anna Ciszewska-Wilkens, KyokoYoshimura, Colleen Fitzgerald, Ken Drozd, Prapa Sookgasem, CariSpring, Megan Crowhurst, Elizabeth Dyckman, Judy Linnane, DavidBergheim, and Rosemary “interosseous” Emery. A special expression ofthanks is due my friends Diane Ohala, Diane Meador, and Pat (Patep)Pérez who steered when I could not. I owe a debt to a few people outsidethe University of Arizona who also assisted me. Wayne Smith welcomedme to TSL research with open arms and freely shared his encyclopedicknowledge of the language and the people. Sandy Sasarita guided megently through hand physiology and had unfailing enthusiasm for theproject. Raquel Willerman shared her insights about ease of articula-tion in spoken languages. Yau Shun Chiu talked with me at length aboutthe sign language of mainland China. Enriched with all of this, I leftArizona in 1992.
In every place I have been since, as I have worked on this projectsporadically, students and colleagues have helped with things from sta-tistics, to computers, to linguistics, to publication, to writing, to physi-cal and emotional well-being. At Purdue University, help came in theform of Ronnie Wilbur, Maggie Rolfe, Chen Nien-Po, Homayoun Vala-far, and Jian Zhao. At National University of Singapore, K. P. Mohanan,Tara Mohanan, David Gil, and Bruce Long Peng started many enlight-ening and exciting conversations about understanding language from aformal perspective. Geraint Wong translated some written materials. AtSan José State University, Martha Bean and I discussed writing andstaying sane in linguistics. At Gallaudet University, the inimitable CeilLucas encouraged me to share my work. At S.U.N.Y. Oswego, the“semi-linguists” in my writing group, Sharon Kane, Bobbi Schnorr,Chris Walsh, Bonita Hampton, Tania Ramalho, Barb Beyerbach, andMary Harrell took on the task of helping me make the manuscript makesense to readers. I thank them all for the attention they paid to my workdespite being much too busy with their own. Pat Russo and Pam Michelhelped me to insist and persist. Theresa Bilodeau carefully worked on
x Acknowledgments
FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page x

the frequency numbers. Sarah Mahan adapted and drew many of thepictures in this book.
Wayne Smith and Ting Li Fen, who literally “wrote the book” onTaiwan Sign Language, allowed me to reproduce pictures of handshapesfrom their works Your Hands Can Become a Bridge, volumes 1 and 2.All pictures come from their work, unless otherwise noted.
There were others, from here and there and from time to time, whoassisted me, some of whom I have not yet met in person. First, the sug-gestions of an anonymous reviewer at Gallaudet University Presspushed me to rethink both the theory and the data in my dissertation bycausing me to face the question of formalism versus functionalism insign language linguistics. I hope what has resulted helps our field moveforward. Shaun O’Connor, Isabel Davis, Susan Fischer, Richard Meier,Chiangsheng Yu, Jeff Davis, David Corina, Susan Duncan, Wendy San-dler, Joan Bybee, Mark Mandel, Bill Stokoe, Vincent van Heuven, OnnoCrasborn, James Woodward, Els van de Kooij, and Harry van der Hulstall have amazing and useful insights into different areas of life, writ-ing, and language, and they all helped me to have faith in the ideas andkeep working on them. And Vera Baquet, Melinda Stone, Nan Uber,Terence Dulin, and especially Susan B. Brown helped me work onthings much closer to home. I am so grateful to them for their excellentlistening and for sharing their thinking with me. And for their embraceand their laughter through all the things that life brings, I thank my sis-ters Dorothy Mancuso, Audrey Gray, and Emmy Nelson and my brothers-in-law Anthony Mancuso, Jim Gray, and Jim Nelson and all my kids,Andrea, Patrick, Marty, Matthew, Warren, Jimmy, and Brian.
In the course of completing this book, I traveled to Taiwan fourtimes. In the beginning, it was John D’Andrea, Zhang Shi, Zhang Da-yin,and especially Jane Tsay who kept me in touch, translating and inter-preting correspondence, articles, and dictionaries. During my early visits,professional courtesies were extended to me by Chiang Ssu Nung andChiang Jenn Tsyi from the Chiying School in Kaohsiung and by ShyueJian Wu, Jennifer Song, D. J. Guan, and S. Y. Wang at National SunYat-sen University in Kaohsiung. By 2003, my colleagues and friends
Acknowledgments xi
FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page xi
James Myers and Jane Tsay of the Graduate Institute in Linguistics atNational Chung Cheng University in Chia-yi had invited me to Taiwanfor an incredible event: the first international Taiwan Sign LanguageLinguistics Symposium. At that time, the three of us made a plan to helpme finish the book. I am overwhelmed by and grateful for their long-standing encouragement of me and my work, ever since we were grad-uate students at Arizona, and it is absolutely clear that if they had notprovided extensive help with the data, the book would never have beenfinished. Their graduate students, Chang Feng Ru, Lin Fang Yu, Su Shiou-fen, Tsou Ya-ching, Lee Yan-an, Chiu Cheng-hao, and especially LeeHsin-Hsien deserve abundant thanks.
Of all the experiences I have had connected to this book, the mostfun has been to learn about language from members of southern Taiwan’sDeaf community. During my first trip to Kaohsiung, only one of thepeople I met had heard of the legendary work of Wayne Smith and TingLi Fen years before in Taipei; most were unfamiliar with linguisticsand linguists. And yet, somehow, they answered “linguist” questions,told me how things were said in their language, introduced me to theirfriends, and helped me make Kaohsiung home. For taking this leap offaith, I thank Lin Fang Shi, Wong Tzuu Pin, Wong Yeh Yeong, Tsay Jia-zhen, Chung Ru Feng, and others who wish to remain anonymous. Thesmall corpus analyzed in this book comes from conversational data ofnative signers Lu Jia-li, Cai Jia-zhen, Wu Su-li, and Wu Yi-san. A fewwords here will not begin to express my thanks to all of these peoplefor their enormous contribution to my understanding of sign languagesand of life. I can only hope that this book will, however indirectly, makea contribution to their lives as significant as the one they made to mine.
Since the beginning of this project, I have been very fortunate toreceive funding from important sources. In 1990, the American Coun-cil of Learned Societies and the Social Science Research Council withthe Chiang Ching-Kuo Foundation awarded me a dissertation grantto go to Kaohsiung to collect data. In 1992, the American Association ofUniversity Women provided me with a grant that supported the finalyear of writing the dissertation. In 2000, I received a Scholarly and
xii Acknowledgments
FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page xii
Creative Activities award from S.U.N.Y. Oswego that freed up sometime to write. In 2001, 2003, and 2005, I was able to secure studenthelp thanks to small grants from the Oswego chapter of United Univer-sity Professions as part of the negotiated Joint Labor Management Pro-fessional Development and Quality of Work Life program. In 2003,I received an International Education grant from S.U.N.Y. Oswego toattend the TSL Linguistics Symposium. In 2005, I made the final revi-sions to this book during my sabbatical at National Chung Cheng Uni-versity, which was made possible through a second grant from the ChiangChing-Kuo Foundation. I am extremely grateful to all these fundingsources. Their willingness to persistently fund this project indicates agreat need to know what the study of Taiwan Sign Language and thepeople who use it might reveal.
I am indebted to Deirdre Mullervy and Ivey Wallace at GallaudetUniversity Press who were patient and understanding of the many delays.Mary Gawlik, the copy editor, righted many wrongs. For any errors thatremain, I take full responsibility.
And at last, I offer unbridled gratitude to Bruce Long Peng. Adven-tures such as this one are even better when one has a home. Peng Longmoves mountains to make ours a loving home where we can write,think, and laugh. He takes on all the burden of being my partner, favoritelinguist, revered chef, most efficient travel agent, most constructivecritic, loudest cheerleader, and dearest friend. He has been beside meevery step of the way, and without his considerable and much cherishedinfluence in my life as a linguist and as a human being, I cannot imag-ine having come this far.
Acknowledgments xiii
FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page xiii

FM_8033_JeanAnn_Gallaudet 9/7/06 11:56 AM Page xiv

Chapter One
Contextualizing this Book
In the late 1960s, a surprising claim was made: the gestures that Amer-ican Deaf people use in communication with one another actually hadall the properties of a language (Stokoe, Casterline, and Croneberg1965). Part of the evidence advanced to support this claim was that ASLsigns, analogous to spoken words, were composed of parts that com-bined to form larger, meaningful units. These parts were originally pro-posed to be handshape, palm orientation, location, and movement(Stokoe, Casterline, and Croneberg 1965; Battison 1978). With thisclaim, American Sign Language (ASL) became a topic of interest to lin-guists. Indeed, from that time to the present, linguists have investigatedmany sign languages.
This book is concerned neither with the totality of the unit we knowas a sign nor with any linguistic unit larger than a sign. Rather, it ex-amines the parameter of a sign that is known in the literature as hand-shape. The relationship between a handshape and a sign is that of part towhole. A sign is made up of one handshape (or more, depending on thesign) with the palm oriented in a particular way within a particular lo-cation and, perhaps, with movement of the fingers or movement of thehand along a path.
Handshape refers to the configuration of the fingers as a sign isarticulated, for example, the “thumbs-up” handshape or the “peace sign”handshape pictured in figure 1. Throughout this work, the handshapelabeled figure 1a is described as having the thumb extended and the restof the fingers closed to the palm. The handshape labeled figure 1b is
1
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 1

described as having the index and middle fingers extended while thethumb, middle, and ring fingers are closed to the palm. All other hand-shapes are described in similar terms.
ASL and some of the sign languages of Europe, including SLN(Sign Language of the Netherlands) and SSL (Swedish Sign Language),are probably the world’s most studied sign languages. A gap continuesto widen between the study of these and other North American andEuropean sign languages, not to mention the sign languages in use onother continents. In this book, I focus on Taiwan Sign Language (TSL),an under-studied sign language, but one of the more studied sign lan-guages of Asia.
In a nutshell, this book examines the relationship between fre-quency of occurrence of handshape and ease of articulation of hand-shape. About fifty-six handshapes have been discovered for TSL (Smithand Ting 1979, 1984). The null hypothesis would predict that all fifty-six handshapes ought to occur with equal frequency in TSL. However,this conjecture is not the case; in fact, some handshapes occur withmuch greater frequency than others. Why should this variation occur?Linguists might hypothesize that ease of articulation has something todo with this phenomenon. In other words, the handshapes that are usedmost frequently are the easiest to articulate or make. This book exam-ines that hypothesis.
2 Chapter One
a. b.
Figure 1 Some handshapes
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 2

APPROACHES TO LINGUISTIC STUDY
One way linguists seek to understand the structure and function of lan-guage in general is by focusing on a specific phenomenon in one lan-guage. The questions that I examine concern the relationship betweenfrequency of occurrence and ease of articulation with respect to hand-shapes in TSL. More precisely, how are easy-to-articulate and difficult-to-articulate handshapes distributed in TSL? Do easy handshapes oc-cur frequently and difficult handshapes occur less frequently? Or doessome other relationship exist between ease of articulation of handshapesand frequency of occurrence, if a relationship exists at all? The contextof these questions needs to be made clear at the outset to establish howanswers might be reached. Because linguists have explored the ideasof both ease of articulation and frequency of occurrence largely in thecontext of an approach known as functionalism, and not in the contextof an alternate approach known as formalism, I discuss these approachesto linguistic study first.
In modern linguistics, researchers have taken diverse positions withrespect to how to approach the task of understanding language. Thesepositions are said to include two general approaches known as formal-ism and functionalism (Newmeyer 1998). The preoccupations of eachapproach are different, and as a result, each has divergent views on somerather serious issues, including (a) the facts about language that needto be “explained” (Newmeyer 1998, 96); (b) the domains worth explor-ing in search of “explanation” (Newmeyer 1998, 96); (c) what countsas an “explanation” (Newmeyer 1998, 96–97); and (d) the goals of lin-guistic analysis (Haspelmath 2000, 236).
The task of fully describing formalist and functionalist perspec-tives on all of these issues is beyond the scope of this book and mighteven be impossible because one cannot always clearly distinguish oneway of thinking in relation to the other, and overlap between positionscertainly exists. Consequently, researchers who call themselves for-malists do not necessarily agree about every aspect of formal linguisticanalysis, nor do all who call themselves functionalists always agree on
Contextualizing this Book 3
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 3

a functional analysis (Newmeyer 1998). Nevertheless, it is possible tocrystallize the basic ideas in each of these schools of thought in a waythat clarifies how linguists from different perspectives try to understandhuman language.
In general, formal linguists believe that languages are internallyconstrained. In other words, grammars have their own internal logic,separate from anything else in human cognition (Newmeyer 1998).Functional linguists take a very different view. They believe that theconstraints on linguistic structure may arise from anatomy or physiol-ogy of the vocal tract; the perceptual system; general cognitive con-straints; and psychological, psycholinguistic, or sociolinguistic con-cerns and aspects of how language is used. Newmeyer (1998) claimsthat too strict a dichotomization of these views results in oversimplifi-cation and suggests that formalists and functionalists seek both internaland external explanation.
In addition to diverse views on the source of constraints, formal andfunctional linguists have differences of opinion on other matters. Forexample, formal linguists, following de Saussure (1916) and Chomsky(1965), distinguish the notions of linguistic competence (i.e., what aspeaker knows) from linguistic performance (i.e., what a speaker actu-ally does). Linguistic competence refers to linguistic knowledge thathumans have even when they cannot actually act on that knowledge. Forexample, factors such as alcohol consumption or exhaustion affect, notcompetence, but performance in such a way that speakers might slur orhave difficulty recalling words. Speakers who are affected in this wayclearly have competence in their languages, but under adverse condi-tions, might be unable to perform in the optimal way.
The research agenda in formal linguistics attempts to get at whatspeakers know, but considers what speakers actually do as relativelyuninteresting (Newmeyer 1998; Bybee and Hopper 2001). Therefore, aformal linguist seeking grammaticality judgments might invent a sen-tence (e.g., Who does Grace know Sue saw?) without concern as towhether that sentence either has ever been said or is likely to be said.
4 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 4

In the thinking of many functional linguists, a sentence such as that onemight be grammatical but, if it is rarely, if ever, uttered, then it becomesirrelevant because speakers choose other ways to get across the sameidea (Newmeyer 1998). Those linguists question the theories that havebeen built on grammaticality judgments of those obscure sentences. Toa formal linguist (who might well admit that sentences such as Whodoes Grace know Sue saw? are relatively rare in occurrence), the over-riding issue is whether such a sentence could be said (and consideredgrammatical) in some situation. The fact that it rarely, if ever, is utteredis a matter of little importance.
Functional linguists question the value of dichotomizing compe-tence (what we know) and performance (what we actually say) (Bybee2001b). After all, as Bybee and Hopper (2001) point out, “outside lin-guistics, it is widely held that cognitive representations are highly af-fected by experience” (1). Thus, for the functional linguist, the data ofinterest involve what is actually spoken, not what merely might happento be spoken. In keeping with their approach, functional linguists tend touse as data corpora of sentences that have been spoken in natural speech.
Clearly, formal and functional linguistics have different preoccu-pations and goals. As Newmeyer (1998) explains,
[f ]unctionalist work, then, is not addressed to formulating grammar-
internal principles characterizing the well- or ill-formedness of a set of
sentences. Instead, a generalization about grammatical patterning
might be attributed to the most orderly or efficient means of convey-
ing information, the desirability of foregrounding or backgrounding
events in the discourse, the speaker’s desire for economy, the hearer’s
demand for clarity, or cognitive propensities not specific to language
such as a general preference for iconic over arbitrary representations,
and so on. (10–11)
To better understand the approaches of formalism and functional-ism, we need to consider how both play out in specific areas of lin-
Contextualizing this Book 5
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 5

guistic study. Syntactic analysis has been conducted by both formal-ists and functionalists. Although proponents of each know the generalcharacter of one another’s work, they do not know much about one an-other’s philosophical positions and consequent research paradigms(Newmeyer 1998). In the 1990s, researchers became interested inarticulating the differences between formalist and functionalist ap-proaches as well as their respective advantages and disadvantages, par-ticularly, in relation to syntactic questions (Newmeyer 1998; Darnellet al. 1999; Haspelmath 2000). Functional linguists have made a num-ber of observations about syntax that most formal linguists accept astrue. Despite this acceptance, these observations have not been madepart of formal syntactic theories (Bybee 2001a). Despite efforts at un-derstanding one another, a gulf between the two approaches clearlyremains.
In phonology, too, we find this sort of dichotomy between formaland functional approaches (Hayes 1999; Bybee 1999). Most phonolo-gists accept the idea—a functionalist idea by its very nature—that thetension between the need to minimize articulatory effort and to mini-mize perceptual confusion results in human languages sounding theway they do (Passy 1891; Boersma 1998). It has long been tacitly un-derstood that functionalism in phonology “is phonetic in character”(Hayes 1999, 243).
Phonetic motivation (motivation from the articulation, acoustics,or perception of speech) has always been sought as motivation forphonological phenomena (that occur in the sound system overall)(Bybee 2001b). Yet the idea that understandings from phonology andphonetics are crucial to each other and very closely linked has a some-what uneasy following, and many (e.g., Keating 1996; Lindblom 2000;Lindblom 1992; Ohala 1990; Myers 1997) have described a gulf betweenphonetics and phonology. This uncomfortable relationship, however,seems to be changing. Lindblom (2000) notes that relatively new theo-ries of articulatory phonology (Browman and Goldstein 1990a, 1990b),laboratory phonology (Pierrehumbert, Beckman, and Ladd 1996), and
6 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 6

optimality theory (Prince and Smolensky 1993) are connecting phono-logical and phonetic findings, as grounding theory (Archangeli andPulleyblank 1994) had tried to do. More recently, an “effort-based” ap-proach to understanding phonological phenomena (see Kirchner 2001)and “phonetically based” phonology (Hayes, Kirchner, and Steriade2004) are gaining attention from phonologists.
In this mildly chaotic context, then, this book tries to pave the wayfor talking about TSL phonology by focusing on aspects of the language(connected to ease of articulation) and aspects of the way that TSL isused (connected to frequency of occurrence).
FREQUENCY OF OCCURRENCE AND FORMAL LINGUISTICS
For formal linguists, word frequency is “a matter of linguistic perfor-mance rather than competence” (Pierrehumbert 2001, 138–9), conse-quently, the subject is not of much interest. Bybee (2000) explains that“structuralist and generative theories assume that the lexicon is a staticlist, and that neither the rules nor the lexical forms of a language arechanged at all by instances of use” (14). Citing Pierrehumbert (1999a),Bybee (2000) notes that optimality theory (Hayes 1999; Prince andSmolensky 1993, 1997) “posits a strict separation of lexicon and gram-mar that makes it impossible to describe any of the interactions ofphonology with the lexicon that are attested in the literature” (14).Nevertheless, though few would argue that frequency figures promi-nently into the problems or explanations of formal linguistic theories(Pierrehumbert 2001), formalists certainly make use of and rely on re-lated ideas.
The basic goal of formal linguistics is to answer the question Whatis a possible human language? To this end, formal phonologists findasymmetries in phonologies. Asymmetries can be discovered by ascer-taining whether something is attested and something else is unattestedwhere we might have expected it to occur. Under this scenario, the
Contextualizing this Book 7
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 7

possibilities are simply that some pattern or segment is attested or un-attested. An example of this kind of a pattern is the occurrence of per-missible “s-stop” clusters in English. Because we frequently find voice-less obstruents together and almost never find mixed pairs of obstruents,we say that [sp], [st], and [sk] are permissible clusters in English butthat *[sb], *[sd], and *[sg] are not, as indicated by the asterisks. Thispattern of obstruent sounds that are both voiceless is robust; in otherwords, it almost always works this way in English. And formal lin-guists—for example, those working in optimality theory—might en-code these observations in the theory by positing a constraint such asADJACENT OBSTRUENTS MUST AGREE IN VOICING.
Not every linguistic pattern is this robust, however. Some patternsare attested but only to a certain degree. A gradient pattern is one thatoccurs not almost always, as described above, but only sometimes. Atone time, little attention, if any, was paid to gradient patterns. Now, for-mal linguists are paying more attention to them. For example, Hayes(2001) describes the case of light [l] (the alveolar [l] in words such asleaf ) and dark [l~] (the velarized [l~] in words such as full) in English.The fact that there are environments where each of the allophones oc-curs is uncontroversial. But Hayes finds that there are also environmentswhere either can occur in free variation. In other words, [l~] and [l] canfreely vary (i.e., they occur gradiently). To date, formal linguists haveignored this scenario because it is neither attested (occurring) nor unat-tested (not occurring) but is, rather, a finer grained distribution. Hayes(2001) suggests that the problem of “gradient well-formedness may be one of the most pervasive overlooked-but-unsolved problem in lin-guistics” (118).
Another sense in which formal linguists care about frequency tosome extent is in the area of markedness. Markedness has to do withphenomena that occur across languages. Formal linguists note that thereare languages with obligatory onsets and languages with optional on-sets, but no languages where there are only onsetless syllables. They en-code facts of this nature into theories of phonology. For example, pho-nologists working in optimality theory posit a constraint making it
8 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 8

costly to have codas with no onsets.1 I will have more to say aboutmarkedness later in the chapter.
FREQUENCY OF OCCURRENCE AND FUNCTIONAL LINGUISTICS
When Zipf (1935) claimed that the most frequently used forms of a lan-guage are also the shortest, relative frequency of linguistic forms wascorrelated with the structure of language for the first time. Since thisclaim was made, frequency has not been talked about much in linguis-tics (Ellis 2002; Bybee 2001a). In related literature, however, some ofwhich is reviewed in Ellis (2002), evidence is mounting that, generally,people pay attention to frequency in cognition and, specifically, to fre-quency in language behavior (Ellis 2002; MacDonald 1994; Hare, Ford,and Marslen-Wilson 2001).
Consequently, frequency needs to be taken into consideration in the-ories of language. Kemmer and Barlow (2000), for example, point outthat “because the system is largely an experience-driven one, frequencyof instances is a prime factor in its structure and operation . . . [and] ithas an indispensable role in any explanatory account of language” (x).And within linguistics, it is now understood that people “have an extra-ordinary sensitivity to frequency” (Labov 1994, 598). In fact, Newmeyer(1998) describes frequency of occurrence as central in the thinking offunctional linguists.
Pierrehumbert (1999b) explains that “language patterns are learnedthrough statistical generalizations over numerous patterns” (112). Re-cent research has revealed many insights about how frequency inter-acts with linguistic behavior, for example, in the area of lexical access(Hare, Ford, and Marslen-Wilson 2001), sound change (Labov 1994;Bybee 2000; Phillips 2001), other phonological behavior (Bybee 2001a,2001b), structural change (Hentschel and Mendel 2002), syntactic patterns
Contextualizing this Book 9
1. A syllable such as strain would look something like this transcribed in IPA:[strein]. In this sequence, [str] would be an onset and [n] would be a coda.
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 9

and discourse patterns (Bybee 2000), and second language acquisition(Ellis 2002).
Bybee and Hopper (2001) summarize the literature by saying thatthere are frequency effects on words, on phrases and other construc-tions, in discourse, and in many other areas of language study. They add,
These effects are (1) phonological reduction in high frequency words
and phrases, (2) functional change due to high frequency, (3) fre-
quency and the formation of constructions, (4) frequency and acces-
sibility, (5) the retention of conservative characteristics and (6) the
notion that a stochastic grammar is a result of linguistic knowledge
based on experience. (3)
All of these findings lead to a conclusion stated by Bybee and Hopper(2001): “Linguistic material cannot accrue frequency effects unless thebrain is keeping track of frequency in some way” (9).
Having considered what frequency might explain, we now exam-ine how frequency has been characterized. Two kinds of frequency arerelevant for functionalist theories: type frequency and token frequency(Bybee 2001b). Different sorts of effects are associated with these twotypes of frequency (Bybee 2001b).
Type frequency refers to “the dictionary frequency of a particularpattern e.g. a stress pattern, an affix or a consonant cluster” (Bybee2001b, 10). For example, if we assume that every two-syllable Englishword has one and only one stress, then two relevant stress patternsemerge: (1) stress the first syllable and (2) stress the second syllable. Ina given corpus, words such as knitting, staple, and quiver would becounted as exemplars of the first type because they all have initial stress.Words such as implore, allege, and descend would count as exemplarsof the second type because they all have final stress. Which is the morefrequent pattern in English? Calculating a type frequency requires count-ing how many times a particular pattern, not a particular word, occurs.
Type frequency plays a role in constructing explanations for lin-guistic puzzles. For example, though some linguists disagree (Dressler
10 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 10

and Ladányi 2000), many assert that type frequency assists in deter-mining productivity, namely, the “extent to which a pattern is likely toapply to new forms such as borrowings or novel formations” (Bybee2000, 12–13). Novel forms in a given language have been shown to takemorphology that has higher type frequency than lower type frequency.For example, Bybee (2001a) points out that “new verbs entering Frenchare usually conjugated according to the pattern of the First Conjuga-tion” (110).
The second type of frequency that is important in functionalist the-ories is token frequency. Token frequency refers to the “frequency ofoccurrence of a unit, usually a word, in running text—how often a par-ticular word comes up” (Bybee 2001b, 10). Bybee (2001b) explains thatin Francis and Kucera’s (1982) corpus of English usage, “broke (the pasttense of break) occurs sixty-six times per million words, while the pasttense verb damaged occurs five times in the same corpus. In other words,the token frequency of broke is much higher than that of damaged” (10).
Token frequency “has two distinct effects that are important forphonology and morphology” (Bybee 2001b, 11). The first effect is thatphonetic change seems to “progress more quickly in items with high to-ken frequency” (Bybee 2001b, 11). Examples include English contrac-tions—frequent collocations such as can’t, couldn’t, won’t, wouldn’t,shouldn’t, don’t, didn’t that have become lexicalized in the writing sys-tem. Other examples such as wanna, gonna and gotta, though not ac-cepted in the formal writing system, are said regularly by many if notmost speakers (Bybee and Hopper 2001). Less-known examples inwhich a phonological change occurs include the loss of the schwa in fre-quent words such as every, camera, memory, and family, making themtwo-syllable words for many speakers. But the schwa remains in simi-lar, though less frequent, words such as mammary, artillery, and homily,keeping them three-syllable words for many speakers (Bybee 2001b).
Although words that have high token frequency seem to easily un-dergo phonetic change, a second effect found in words with high tokenfrequency is that “they are more resistant to other kinds of change”(Bybee 2001b, 11). For example, English speakers tend to overgeneralize
Contextualizing this Book 11
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 11

the rules for forming the past tense of less frequently used verbs, pro-ducing weeped instead of wept, creeped instead of crept. Interestingly,similar high frequency verbs like sleep and keep do not become tosleeped or keeped. Clearly, then, high frequency irregular verb paradigmsare also conservative. The same kinds of effects also show up in syntax.
EASE OF ARTICULATION
Many phoneticians and phonologists believe that languages developtheir phonological character in response to the dual pressures of theprinciples of maximal clarity and least effort.2 In other words, with theleast effort, the listener wants to be able to understand what is being saidand the speaker wants to be understood (Passy 1891; Ladefoged 1982;Lindblom 1998; Lindblom 1990; Donegan 1985).
The idea of least effort has been thought about in terms of segmentsand combinations of segments in spoken languages. The first problemwith thinking of segments as easy or difficult to articulate is that underthe scrutiny of phoneticians, the notion of segment itself is suspect(Öhman 1966, and many others) because the “same” segment is articu-lated differently depending on the sounds that surround it. The notion ofsegment is no more than a useful tool to talk about single sounds; “aconvenience for the researcher attempting a rough organization of hisobservations” (Pierrehumbert 1990, 390). And yet, segment is a persis-tent idea. Its persistence notwithstanding, Browman and Goldstein(1990b) assert that “just as Pierrehumbert suggests that fine phonetic
12 Chapter One
2. Maddieson (1998) recasts “older formulations” of articulatory ease andauditory distinctiveness as a balance between contrastivity and connectedness. Henotes that “contrastivity is the requirement that a language must show differentiationin sound, rather than being undifferentiated noise” (106). Maddieson’s notion ofconnectedness is that “a language needs to be produced as a continuous stream, itsparts connected to each other just as essentially as they must be differentiated fromeach other. . . . The suggestion here is that it is the need to achieve connectedness-rather than an explicit minimization of articulatory effort—that favors limits on therange of articulatory gestures, especially in adjacent parts of the utterance” (107).
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 12

transcription has no real status in phonetics, . . . there is no reason toassume that representations employing segmental transcriptions haveany theoretical status in phonology” (418). All of this commentary sug-gests that the notion of segment is controversial and outmoded, if nec-essary for the time being. This situation is changing slowly. Westburyand Keating (1986) make the assumption that ease of articulation cannotbe determined segment by segment but, rather, in consideration of thesounds adjacent to the segment in question. Current theories of phonol-ogy look at segments in context.
The second problem concerns the characterization of ease of artic-ulation. Despite its appeal as an explanation for linguistic phenomena,the intuitively pleasing notion of ease of articulation is extremely diffi-cult to quantify. It is not surprising that linguists generally agree that theattempts to explain what makes a sound relatively easy or difficult toarticulate have not yet adequately characterized ease of articulation inspoken languages (Ohala 1990, 1992; Lindblom 1990; Nelson, Perkell,and Westbury 1984; Keating 1985; Stevens 1971). Characterizing easeof articulation does look somewhat elusive. Ladefoged (1990) suggeststhat ease of articulation cannot be measured and that it would alwaysend up being language dependent. For this reason, appeals to ease ofarticulation as an explanation would necessarily be unfalsifiable. Lind-blom (1998) acknowledges that ease of articulation is “difficult todefine” (250) and suggests that worries about “uncritical use of articu-latory ease . . . [are] well taken” (Lindblom 2000, 304). However, Lind-blom (1998) claims that these warnings “appear overly pessimistic” andsuggests that “recent developments indicate that this situation (ease ofarticulation as difficult to define) is about to change” (250). This devel-opment is fortuitous because the absence of a way to characterize easeof articulation independently can lead to circular reasoning to explaincertain linguistic puzzles. Properties such as markedness and ease ofarticulation are often linked in the literature. The persistence of this cir-cularity is described in Willerman (1994) as “so striking that it is oftendifficult to tell whether markedness is proposed as an explanation or assomething to be explained” (34–48).
Contextualizing this Book 13
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 13

Even if we had answers to these two problems, there is still thequestion of how ease of articulation might be incorporated into theo-ries of phonology. In formal theories, phonologists express ease ofarticulation only indirectly, if at all, for example, when considering no-tions such as marked and unmarked. And in the phonological literatureat large, Lindblom (1992), citing Anderson (1985), states that “the prob-lem of how to represent naturalness of rules and segment inventories forexample has largely disappeared from the literature . . . [though] mostlinguists would agree that . . . [these topics] still present . . . major un-resolved problems” (182). This problem is one that phonologists are justbeginning to work on (Lindblom 1992, 2000); thus, the status of easeof articulation as a theoretical construct is in question. These problemsassociated with ease of articulation notwithstanding, researchers havecertainly appealed to it. In the next subsection, first I review the waysthat ease of articulation has been characterized in the literature and, sec-ond, the linguistic phenomena that ease of articulation has been invokedto explain.
HOW EASE OF ARTICULATION MIGHT BE CHARACTERIZED
To arrive at a definition of ease that can be independently motivated(Keating 1985; Lindblom 1983) would enable us to avoid a circular de-finition of ease of articulation.3 Various attempts have been made toshow that certain sounds require more effort than others.
14 Chapter One
3. As Willerman (1994) explains, “A problem of circularity arises when theexplanatory apparatus is built solely from the data to be explained” (37). Thus, thefollowing reasoning is circular: the sounds that are easy to articulate are the onesthat are acquired first (or marked across languages or marked within languages) andthe sounds that are acquired first (or marked across languages or marked withinlanguages) are the ones that are easy to articulate. This discussion owes much to asimilar discussion in Willerman (1991), some of which also appears in Willerman(1994). In addition, I thank Willerman for helpful discussion of and comments onan earlier draft of this section.
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 14

Departure from the Normal–Neutral Position Makes a Sound More Difficult
Two strands of research, the bite-block studies and studies of sponta-neous voicing, point to the conclusion that sounds whose articulatorsdepart from a normal or neutral position can be considered more diffi-cult than sounds whose articulators remain in normal or neutral position.I briefly examine each in turn.
The bite-block studies.
A bite-block is a device that is placed in the mouth to prohibit the jawfrom moving normally. In the bite-block studies, speakers producedvowels under normal conditions and under the condition in which theirjaws were restrained by a bite-block. Researchers found that the formantvalues for bite-block vowels correspond very closely to those of nor-mal vowels (Lindblom and Sundberg 1971; Gay, Lindblom, and Lubker1981). How is this correspondence possible? The researchers surmisethat subjects compensate for the lack of mobility in one area (the jaw)by exaggerating a gesture in another area (the tongue). This response isknown as compensatory articulation (Lindblom and Sundberg 1971),and these exaggerated gestures of the tongue are referred to as super-shapes (Lindblom and Sundberg 1971; Gay, Lindblom, and Lubker1981). When speakers’ jaws are prevented from assuming, say, a rela-tively closed position in the case of /i/ because of the bite-block, speak-ers produce /i/ by using an exaggerated gesture of the tongue to com-pensate. These exaggerated gestures of the tongue are referred to as“supershapes” (Lindblom and Sundberg 1971; Gay, Lindblom, andLubker 1981). Lindblom and Sundberg (1971) find that “characteristicof the supershapes is the antagonism between the tongue muscles andthe jaw muscles” (1178).
The bite-block studies have implications for the study of ease ofarticulation. If speakers can produce the same vowel with either thenormal shape or a supershape of the tongue, then why do they choose
Contextualizing this Book 15
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 15
the normal shape? The researchers conclude that it must be becausethe supershapes are simply too demanding. They reason that speech,like other motor behaviors, evolves according to minimum expenditureof energy or least effort (Lindblom 1983; Lindblom 1990; Lindblom2000; Willerman 1991; Willerman 1994).
Spontaneous voicing.
The second strand of research relevant here concerns spontaneous voic-ing. Spontaneously voiced sounds include liquids (such as [l] and [r]),nasals (such as [m] and [n]), glides (such as [y] and [w]), and vowels(such as [a] and [u]). Two conditions must be met for voicing to occur:first, the vocal cords must be relatively close together, and second, airmust be crossing over the vocal cords (Ohala 1983). Both conditions aremet in the normal articulation of liquids, nasals, glides, and vowels;therefore, those sounds are considered “spontaneously” voiced. In con-trast, stops (such as [p] and [t]) and fricatives (such as [f] and [s]) arespontaneously unvoiced because when they are produced, there is noairflow to set the vocal cords into vibration (Ohala 1983; Westbury andKeating 1986; Ladefoged 1975). Of course, it is possible to produceboth unvoiced sonorants (such as [m
˚]) and voiced fricatives (such as [v])
and stops (such as [b]), but producing those sounds requires more ef-fort than the “natural” versions (Willerman 1991). Investigations havebeen conducted in this area. Westbury and Keating (1986) explicatedan articulatory model within which the explicit hypothesis that voicedstops are less natural than voiceless stops could be examined.
Higher Rates of Displacement Indicate Difficulty
Higher rates of displacement of the mandible indicate more difficulty,and they are avoided. This conclusion was drawn on the basis of a study,which showed that moving an articulator the same distance in a shorter(versus longer) period of time requires an increase in velocity. An in-
16 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 16

crease in velocity is associated with greater force, or more effort. Nelson,Perkell, and Westbury (1984) found that subjects attempted to reducethe time it took to say “sasa” by trading the use of greater velocity (moreeffort) for shorter distance. In other words, to speak faster, speakersmove their articulators a shorter distance (reducing vowels, for example)rather than work harder (producing a full vowel).
Higher Number of Articulatory Events per Unit of Time Indicate Difficulty
In the theory of articulatory phonology (Browman and Goldstein 1985,1986, 1990c, 1992, 1995), “the basic units of phonological contrast aregestures, which are also abstract categorizations of articulatory events,each with an intrinsic time or duration” (1992, 155). The behavior of thearticulators (such as the velum, the tongue body, the lips, and the glot-tis) used in producing a syllable or phrase can be represented as a “ges-tural score”—a schematic diagram of what each of the articulators isdoing during the utterance. A gestural score represents the articulatorygestures of various articulators during an utterance as separate “events”that must be coordinated in time. Two given utterances may have dif-ferent numbers of necessary articulators, which will correspond to thesame number of tiers and the degree of difficulty. Browman and Gold-stein’s work focuses on sounds in the context of whole words or phrases(Bybee 2000).
Willerman (1991) reasons that gestural “scores can model one fac-tor of articulatory complexity. As the number of events per unit timeincreases, so does the articulatory complexity” (33). For example, takethe case of aspiration. Ohala (1992), citing Ladefoged (1984), says that“aspirated consonants are . . . costly in that they use considerable respi-ratory energy, and an obvious candidate for pruning in any attempt toreduce the overall effort required for an utterance” (347). Presumably,gestural scores would reveal that aspirated consonants are harder to pro-duce than others.
Contextualizing this Book 17
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 17

Greater Degrees of Articulatory Precision Indicate Difficulty
Stevens (1971) measures and compares the area of constriction abovethe glottis of various sound classes. Vowels require a constriction in aparticular range. Fricatives must be constricted in an area far smaller.Thus, fine motor control for fricatives is greater than that for the vowels.These facts are interpreted by Willerman (1991) to suggest that vowelsare easier to articulate than fricatives. She uses her interpretation ofStevens’s observations to construct the schema in the following:
Vowels Stops Approximants Complex Fricatives
Simpler More Complex
It ought to be clear that construction of a model to determine whatmakes sounds easy or difficult to articulate is a sticky matter. Eventhough the available technology for studying speech sounds is quite ad-vanced, it is not clear what the criteria for ease or difficulty of a speechsound should be. In the absence of a way to characterize ease of articu-lation, appeals to ease as a solution to linguistic puzzles are circular.
Even though the available technology for studying speech sounds isquite advanced, it is not clear what the criteria for ease or difficulty ofa speech sound should be. The problem of coming up with a theory forease of articulation of sign language handshapes is as difficult, if notmore so. I present my theory in chapters 3 and 4. In whatever way easeof articulation might be quantified, it could prove to be a useful con-struct in explaining, or at least contributing to the explanation for, thelinguistic phenomena listed in the following subsections.4
18 Chapter One
4. Lindblom (2000) has a somewhat different list and hypothesizes that “min-imization of energy expenditure plays a causal role in: (1) the absence of vegetativemovement and mouth sounds; (2) determining the feature composition of phoneticsegments (e.g., why are /i/ and /u/ universally ‘close’ vowels); (3) constraining theuniversal organization of syllabic and phonotactic structure; (4) the patterning of di-achronic and synchronic lenition and fortition processes; (5) shaping the system-de-pendent selection of phonetic values in segment inventories, etc.” (305).
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 18

1. Aspects of inventories of linguistic sounds can be explained by ease of articulation.
The idea of teasing out the acoustic, articulatory, phonological, andcognitive constraints on speech sounds that occur in inventories hasinterested linguists for a long time (Trubetzkoy 1939; Donegan 1985;Jakobson 1968; Lindblom and Maddieson 1988; Nathan 1994; Lind-blom 1998). Lindblom (1990) discusses a tautology in phonetics: thedefinition of a speech sound is tantamount to saying that “a speechsound is a sound that occurs as a speech sound in a given language”(138). He suggests that to define speech sound in a noncircular way, wemust examine the set of logically possible sounds of which speechsounds are a part. Willerman (1991) suggests that, of the logically pos-sible sounds, speech sounds are those that require the least effortto produce.
Lindblom and Maddieson (1988) examined the consonant invento-ries of a number of languages and found that the size of inventory cor-related to phonetic content of the inventories. For example, the phoneticcharacter of the consonants in languages with a large number of conso-nants—for example, !Xu (ninety-five consonants)—is quite differentfrom the phonetic character of consonants in languages such as Hawai-ian with an inventory of eight (Willerman 1991). Lindblom and Mad-dieson (1988) and Lindblom (1992) formalize this observation as thesize principle: paradigm size influences phonetic content in a lawfulmanner.
In an attempt to ascertain whether the size principle would explainthe phonetic content of other paradigms besides consonant inventories,Willerman (1991, 1994) examined the phonetic content of pronouns. Asa closed-class grammatical category, pronouns are assumed to have asmall paradigm size compared with the large paradigm size of an opengrammatical class. Willerman (1991, 1994) found that pronouns con-tained a greater number of simpler consonants than would have beenpredicted if the consonants in pronouns had been drawn at random fromthe consonant inventories of languages.
Contextualizing this Book 19
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 19
2. Aspects of first and second language acquisition can be explained by ease of articulation.
Two strands of research suggest that aspects of language acquisitionmight be explained by ease. First, Locke (1983) provides data from sep-arate investigations, conducted years apart, which indicate that the sameconsonants are acquired (i.e., produced) early by children from differentspoken-language backgrounds, including Mayan, Luo, Thai, English,Slovenian, and Japanese, as well as by deaf children. If those variedgroups of children produce approximately the same sounds at the sametime, then something independent of language background or inputmust be responsible. The suggestion is that some notion of physical easeof articulation causes the children to acquire the same sounds in roughlythe same order (Locke 1983, 1993).5
Second, the theory of natural phonology (Stampe 1979; Schane1973; Donegan 1985; Nathan 1982) holds that the major task for pho-nologists is to discover phonological “processes.” A process is a “men-tal operation that applies in speech to substitute for a class of sounds orsound sequences presenting a specific common difficulty to the speechcapacity of the individual, an alternative class identical but lacking thedifficult property” (Stampe 1979, 1). Processes have physical motiva-tions (Donegan 1985). They occur in natural languages for two reasons,as explained in Nathan (1982):
Some processes represent moves toward perceptual clarity or distinc-
tiveness. These are called fortitions. . . . Other processes represent
change towards articulatory simplicity. These are changes resulting in
ease of articulation and are called lenitions. They are carried out on
behalf of our vocal apparatus and enable it to do less work in the time
allotted to it by reducing the number and amount of fine adjustments
that human speech requires. (119–20)
20 Chapter One
5. Willerman (1994) points out that the argument is circular. She writes, “Theargument goes something like this: Children acquire simpler sounds first, so the firstsounds children acquire are the simpler ones. Although this tautology may turn outto be true when independent grounds for articulatory complexity have been estab-lished, the logic is just as circular as the frequency of occurrence hypothesis” (33).
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 20

Lenitions get rid of sounds or sound sequences in service of makingwords easier to articulate, as Donegan (1985) explains:
Lenition processes are typically context-sensitive, since they func-
tion to produce more-easily-articulated sequences. They may be as-
similative, since sequences of similar segments are (it is usually as-
sumed) easier to articulate than sequences of dissimilar segments. Or
they may be reductive since shorter segments require less effort than
longer ones, segments with few or no special articulations require less
effort than those with several, single segments are less demanding
than geminates, and deleted segments require no articulatory effort at
all. (38–39)
Because processes are universal, proponents of natural phonology claimthat they can explain more than synchronic descriptions of phonolo-gies of various languages (Stampe 1979; Donegan 1985; Nathan 1982).Indeed, natural phonology claims to explain aspects of child languageand second language acquisition, historical change over time, and otherlinguistic phenomena.
With respect to first language acquisition, Donegan (1985) suggeststhat children’s first approximations of sounds are often easier to say thanthe target sounds, given children’s limited abilities at any given stage. Thepoint is that the substitutions are not random; the function of processes inchild speech is to replace more difficult sounds or sound sequences witheasier ones. Specifically, for example, devoicing of voiced stops occurs inEnglish because voiced stops are relatively difficult to articulate. And anasal-spirant sequence such as [ns] is also difficult to articulate. Reduc-ing this difficulty is remedied in one of two ways: either by addition of astop between the two sounds or by substituting a nasal lacking oral clo-sure for the nasal, for example, [nts] or [Vs] (Stampe 1979).
Similarly, aspects of second language acquisition can be explainedby ease of articulation. For example, Donegan (1985) suggests that na-tivization of foreign words can often be explained by processes. She usesthe example of a speaker whose first language has the canonical five-vowel system [a e i o u] and who cannot pronounce a particular Englishvowel other than these and therefore substitutes something easier for it.
Contextualizing this Book 21
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 21
Donegan further explains that, sometimes, speakers substitute not onesound but a few, for example, English speakers who, in learning Ger-man, alternate between [i] and [u] in attempting to pronounce [y].
Nathan (1982) argues that natural phonology “can account for thefacts that teachers of second languages already know—that learnerssubstitute ‘easier’ sounds for those that do not exist in their native lan-guages” (123–24).
3. The rarity of some sounds across languages can be explained by ease of articulation.
Sounds that are the most “natural” are so because they are easier to eitherarticulate or perceive (Westbury and Keating 1986). Common soundshave been characterized as those that have the greatest acoustic energyand those that are the most distinctive, or rarely confused with othersounds (Maddieson 1984). Conversely, the sounds that are rarely foundin language are those that are more difficult to articulate or perceive.Maddieson (1998), bolstering the idea that the more difficult soundsare the least commonly found in languages, suggests that sounds that arebelieved to be rather common but, paradoxically, difficult might not beas difficult to articulate as originally thought.
4. Diachronic sound change can be explained by ease of articulation.
The idea that language change is solely attributable to articulatorycauses has not been advanced. In fact, it has been pointed out that easeof articulation could not be the only factor; if it were, then all languagesshould evolve toward the constant articulation of no sound but [ə] (theschwa), which is clearly not the case.
Ohala (1975) argues that, although articulatory ease is likely to playa small role in sound change, perception is a more important factor thanease of articulation. In fact, Ohala (1981, 1993) proposes that some soundchanges begin as listener misperceptions. Ohala (1990) also rejects an
22 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 22

articulatory account of assimilation in favor of a perceptual one, thoughassimilation is usually regarded as an articulatory process (Lindblom2000). Ohala (1992) argues that invoking ease of articulation “makesexplanations teleological” (352); that is, saying that sounds are easy toarticulate implies that the speakers are choosing to make their speecheasier to articulate.6 Still, it seems clear that there are phonetically nat-ural diachronic sound changes.
FORMAL AND FUNCTIONAL APPROACHES TO SIGN LANGUAGE PHONOLOGY
We know less about the structure of signs than the structure of spokenwords, if only because linguists have concerned themselves with onlyspoken languages until relatively recently. In the aftermath of the im-portant claim that sign languages are full-fledged languages (Stokoe,Casterline, and Croneberg 1965; Klima and Bellugi 1979), linguistscame to grapple with the basic questions we ask about spoken languagesas we examine the world’s sign languages. The surge of interest in signlanguages attracted linguists from various backgrounds, linguists withdifferent concerns and preoccupations. Wilbur (1999a) claims that signlanguage research has been more functional than formal and suggeststhat this claim is attributable to the “belief that the origins of formsshould be more easily identifiable in sign languages, thus making in-vestigating form/function relationships more likely to be fruitful thanfor spoken languages” (296). It may be true that more investigationcomes from the functionalist tradition, but investigation in both tradi-tions has contributed to our understanding of sign languages, and clearly,we need both. In any case, few have overtly referred to their research
Contextualizing this Book 23
6. Ohala (1992) further explains his position by saying he disagrees with theidea that “sound changes occur in order to ease production, make speech easier tohear or make it easier to learn or process. There is no denying that teleology(choice, intention) can underlie that spread of a phonetically natural sound change.What I resist is the idea that the initiation or creation of a phonetically-motivatedvariant pronunciation comes about in this way” (352).
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 23

questions and their methods for solving them as either formal or func-tional. As a result, the literature presents a somewhat puzzling array ofinsights into sign language phonology.
FORMAL APPROACHES TO SIGN LANGUAGE PHONOLOGY
At its best, formal inquiry examines language data with an objective todiscover asymmetries. Where asymmetries occur in sound systems, for-mal phonologists have a chance to learn about the language. Explain-ing an asymmetry involves proposing theoretical apparatus; for exam-ple, speaking as atheoretically as possible, some parts of words arelonger and louder, such as the beginning of solar and the end of abate.So seems to be somehow more prominent than lar, and bate seems moreprominent than a. How do we describe this circumstance? If all we hadwere the notions of segment and word, then coming up with a descrip-tion would be challenging. The first two segments in solar sound longerthan the remainder, and the last four segments in abate sound longer.However, by positing the existence of a unit between segment andword—say, the unit of syllable—we begin to describe the asymmetry.We can say that words can be divided into syllables and that in a givenlanguage, certain syllables receive stress. In solar, the first syllable isstressed; in abate, the second.
Formal researchers try to motivate all constructs such as syllablethat are used in a theory. To motivate a construct means to find a reasonto believe that it ought to exist because it would be useful in explainingsomething other than the thing it was proposed to explain. Thus, theconstruct of syllable needs to be motivated phonetically, phonologically,and psycholinguistically as well as examined cross-linguistically to seewhether it is as useful in other languages as it is in English.
Constructs like syllable are part of what formal phonologists call“representations.” In formal sign language linguistics, an important fo-cus has been to establish what the representations are. In an interestingwork that takes very seriously the idea of motivating every single con-struct necessary to describe sign language phenomena, Uyechi (1996)proposes representations of the hand, the signing space, movement, and
24 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 24

the sign itself. Sandler (1996) seeks to represent the entire sign, includ-ing handshape.
Constructs such as syllable (Wilbur 1990) and mora (Perlmutter1992) have been proposed to be useful in explaining linguistic puzzlesin sign languages. Psycholinguistic evidence was provided for the con-struct of syllable in Wilbur (1990, 1993) and Wilbur and Allen (1991).To capture one of the properties of signs, namely, that sometimes thehands arrive at a point and stay there and sometimes the hands arein motion, linguists have proposed the constructs of movements andholds (Liddell and Johnson 1989) and movements and positions (Perl-mutter 1992).
In addition to these proposals for representations, phonologists havealso proposed the existence of phonological rules. Phonological rules, inprinciple, act on representations to derive surface phonological patterns.The phonological rules of weak drop (in which the weak hand in a two-handed sign can drop)—first noticed, according to Brentari (1998), inBattison (1974, 1978) and later discussed in Padden and Perlmutter(1987)—and weak freeze (in which the weak hand in a two-handed signcan freeze)—see Padden and Perlmutter (1987)—were proposed to ex-plain variation in sign production.
Constraints, too, have been proposed from the earliest days. Thesymmetry and dominance conditions (Battison 1978) and the finger po-sition constraint (Mandel 1981) are two examples. These constraintsserved to characterize how signs were produced. Ann and Peng (2000)used optimality theory to describe constraints on how handshapes inwhich some number of fingers are opposed to the thumb are produced.The essence of that analysis was that three types of constraints are nec-essary to account for frequency problems involving opposed handshapesin TSL: the finger selection constraints, the adjacency constraint, andthe extension constraint.
These authors were seeking to understand the structure of sign lan-guages by understanding the constraints within the grammar itself, agoal consonant with formalist leanings. A great deal remains to be saidabout the successes and failures of formal approaches to sign languagephonology; this brief description will suffice only as a beginning.
Contextualizing this Book 25
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 25
FUNCTIONAL APPROACHES TO UNDERSTANDING SIGN LANGUAGES
In the context of sign languages, perception refers to the study of how“listeners” perceive visual information in general and signs in particu-lar. Knowing the structure of the physical signal of a sign, including howfar an articulator goes and how fast an articulator goes in a given pe-riod of time (kinematics) as well as how the articulators of a sign lan-guage interact with one another to produce signs (articulation) can serveto constrain the form of sign languages.
To consider questions of articulation, linguists must be familiar withthe role of hand and forearm anatomy and kinesiology—fields of in-quiry with which few are comfortable (Wilbur 1987). Yet it seems clearthat from the earliest days, sign language researchers suspected a con-nection between what hands naturally do and what aspects of sign lan-guages look like. For example, Battison (1978) outlines a research di-rection calling for the discovery of “the relation between the form of thesigns and the dynamics of the machine which articulates them—the hu-man body” (11–12). He suggested that one goal of phonological de-scription is to “seek motivation for . . . structures and constraints in thearticulatory and perceptual processes which encode and decode theforms of the language” (19–20). Many topics in sign language researchcan scarcely be studied without citing Battison for at least two reasons.First, he suggested that there is a small group of unmarked ASL hand-shapes (Battison 1978). These are said to be easy to articulate, but thisquality is not demonstrated in any way except through their frequency—exactly the circularity that Willerman (1994) cautions us to avoid.
Second, his theory of symmetry and dominance conditions (Batti-son 1978) characterizes, but does not explain, how signs are con-structed. Yet the symmetry and dominance conditions are often cited be-cause they capture important generalizations about ASL signs. Battison(1978) says:
The Symmetry Condition states that (a) if both hands of a sign move
independently during its articulation, then (b) both hands must
be specified for the same location, the same handshape, the same
26 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 26

movement (whether performed simultaneously or in alternation),
and the specification for orientation must be either symmetrical or
identical. . . .
The Dominance Condition states that (a) if the hands of a two-
handed sign do not share the same specification for handshape (i.e.,
they are different), then (b) one hand must be passive while the other
hand articulates the movement and (c) the specification of the pas-
sive handshape is restricted to be one of a small set: A, S, B, 5, G, C,
0. (33–5, emphasis in the original)
As Brentari (1998) says, “The symmetry and dominance conditionshave survived the test of close scrutiny and reinvestigation surprisinglywell, but they left many areas unexplored and later investigators haveworked to refine, extend and formalize them” (252–53). Battison’s workencouraged linguists to think about articulatory and perceptual con-straints for sign languages, and in this way, too, it was seminal. Hiswork, however, does not characterize ease of articulation, perception, orany kinematic property of signs, and for the most part, Battison’s workappeals to none of these as a solution for a specific linguistic puzzle.
Battison’s work undoubtedly has pushed our understandings ahead,but at some point, it will be necessary to understand the perceptual,kinematic, and articulatory constraints on languages, beginning withunderstanding the perceptual, kinematic, and articulatory propertiesof handshapes. To understand these properties, we must examine thephonological features for handshapes and their organization, the issuesconnected to acquisition of handshapes, and the nature of signs orhandshapes.
Phonological Features
In explaining the sound patterns of spoken languages, phonologists makeuse of the idea that sounds are composed of features. This theoreticalmachinery provides a means of explaining phonological phenomenasuch as assimilations—for example, [In � baib] → [Imbaib] in which apreceding nasal takes on the place features of the following stop. Phono-
Contextualizing this Book 27
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 27

logical features are hypothesized to have two possible sources: acoustic(Jakobson, Fant, and Halle 1951/1972) and articulatory (Chomsky andHalle 1968). In other words, phonological features are hypothesized tohave phonetic (acoustic or articulatory) correlates. In the areas of fea-tures, feature combinations, and feature geometries, then, uncontrover-sially, phonology and phonetics interact.
The powerful strategy of describing sounds as being composed offeatures, a strategy that proved so useful in the analysis of spoken lan-guages, has been appealed to in the quest to understand sign languages.The proliferation of feature proposals for sign languages suggests thatresearchers believe features also are helpful in explaining linguisticpuzzles in sign languages. The fact that features are so connected tophonetics in spoken language makes it all the more remarkable that thephonetics of sign languages goes relatively unnoticed, though researchersgenerally make some reference to articulation and perception. Most pro-pose largely articulatory features (see, e.g., Liddell and Johnson 1989;Corina and Sagey 1989; Sandler 1993; Kegl and Wilbur 1976). Somepropose perceptual features (Lane, Boyes-Braem, and Bellugi 1976;Stungis 1981).7 Some propose features motivated by both areas (Brentari
28 Chapter One
7. A striking difference noticed by researchers (Corina and Sagey 1988;Brentari 1990; Mandel 1981; Wilbur 1990; and Poizner, Klima, and Bellugi 1987to name a few) between the phonetics of spoken and sign languages underscoresthis oversight. That is, although speakers are not aware of where they place theirarticulators when they produce sounds, all of the articulators of signers are visibleto the eye. Spoken language phonetics has to be determined by X-ray and otherinvasive methods; it is not clear whether sign language phonetics need be deter-mined in these ways. (I thank Sam Supalla and Ronnie Wilbur for conversationsthat helped to clarify my thinking on this point.)
Finally, Brentari (1998) notes that “a great deal more is known about higherlevel processing in vision than is known in audition” (310–11). She credits this re-ality to two facts: first, that the visual system is more accessible than the auditorysystem for measurements with instruments and, second, that asymmetrical goalsexist in research in audition and vision. Work in audition focuses on hearing thatis impaired whereas work on vision focuses on normal vision. Brentari reasons,therefore, that sign language phonology “can . . . draw upon well-developed re-search on higher order visual processing . . . in a way that spoken language phonol-ogy cannot” (310–11).
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 28

1990, 1998). Most researchers acknowledge the need for (a) features forfingers and (b) features for what fingers can do. In so doing, they discussconstraints of the sort we care about here.
Which fingers work together?
Virtually every researcher who has written about handshapes has real-ized that random combinations of fingers cannot act together in hand-shapes, that a system is involved. The complex business of explainingwhich fingers can combine to take on the same configuration has beenapproached in several ways. Many researchers have noted that fingerscan act relatively independently in handshapes. For example, in thehandshapes for ASL signs SIX, SEVEN, EIGHT and NINE, each of the fourfingers singly opposes the thumb (see figure 2). The physiological factthat the fingers can act relatively independently (as in the signs in fig-ure 2) has been encoded in distinctive feature systems by five features,one for each finger: [Thumb], [Index], [Middle], [Ring], and [Pinky](Mandel 1981; Corina and Sagey 1989; Sandler 1989). Interestingly, theindex finger seems to have special status because it is used in almostall of the licit handshapes (Corina and Sagey 1988; Brentari 1988;Uyechi 1996).
Contextualizing this Book 29
ASL SIX ASL SEVEN ASL EIGHT ASL NINE
Figure 2 Examples in which fingers act relatively independently in hand-shapes, particularly, each of the four fingers singly opposes the thumb.
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 29

Kegl and Wilbur (1976) and Wilbur (1987) propose the adjacencyconvention. It is part of a feature system that includes the followingfeatures: [extended], [closed], [2adjacent], and [3adjacent]. The feature[extended] refers to some unspecified number of fingers that are ex-tended. The feature [closed] refers to some unspecified number of fingersthat are closed. The features [2adjacent] and [3adjacent] specify theexact number of fingers, excluding the thumb, which are adjacent and“relevant” in handshapes that are [� extended]. Kegl and Wilbur (1976)claim a relationship exists between [� closed] or [� closed] and thefeatures [2adjacent] and [3adjacent]. So, for example, if in a particularhandshape the combination of features [� closed], [� extended], andeither [2adjacent] or [3adjacent] is assigned, the counting of fingersstarts at the index edge of the hand. A handshape that has the features[� extended], [� closed], and either [2adjacent] or [3adjacent] startscounting at the pinky edge. The features [2adjacent] and [3adjacent]are not relevant for handshapes that are [� extended]. Though Kegland Wilbur (1976) do not make explicit reference to physiological factsabout the fingers in explaining their observations, clearly they see apattern in what fingers act together in handshapes.
Brentari’s (1998) prosodic model incorporates insights not onlyfrom her own work but also from the work of other researchers. Thoughher model deals with more than handshape, discussion of handshape issignificant. Some of the handshape features in Brentari (1990) are saidto have acoustic and articulatory bases, but they are labeled as havingonly an articulatory base in Brentari (1998).
Along similar lines, Brentari (1998; Brentari, Hulst, van der Kooij,and Sandler 1996) also discusses the issue of which fingers occur to-gether. She proposes four features ([all], [one], [mid], and [ulnar]). Thefeatures “[all] and [one] specify the number of selected fingers: [all] isdefined as all four fingers, and [one] is defined as one finger. [ulnar] and[mid] specify where the point of reference occurs: [ulnar] specifies thatthe pinkie finger side of the hand is used as the reference point; [mid]specifies that the middle finger is used; otherwise the radial or indexfinger side of the hand is assumed” (Brentari 1998, 112)
30 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 30

What configurations can fingers assume?
Several proposals describe the four configurations that are possible inASL. The fingers can be open, curved, bent, or closed (after Brentari 1990;Liddell and Johnson 1989).8 Figure 3 illustrates these configurations.
Sandler’s (1989) feature system that describes the handshapes infigure 3 has four monovalent features: [open], [closed], [bent], and[curved]. Fingers like the ones in figure 3a are [� open]. The handshapein figure 3b is [� curved], the handshape in figure 3c is [� bent], andthe handshape in figure 3d is [� closed]. In this system, each of the con-figurations has a separate feature; therefore, phonetic similarities be-tween configurations are obscured.
Corina and Sagey (1988; 1989) and Corina (1990) point out that thehandshapes in figure 3a through figure 3d share physiological similari-ties. The handshape in figure 3a is not flexed at any joint, and the hand-shape in figure 3b is not flexed at the knuckle, but it is flexed at the otherjoints. Handshapes like figure 3c are flexed at the knuckle and extendedat the other joints; they share the physiological similarity of flexion atthe knuckle with handshapes like figure 3d. To describe the configura-tions in figure 3a through figure 3d and, at the same time, encode thefacts that certain of the handshapes share physiological characteristics,Corina and Sagey propose two bivalent features, [bent] and [hooked].
Contextualizing this Book 31
8. In this work, I use the term open when citing or discussing the work ofother researchers. Otherwise, I use the term extended.
a. open b. curved c. bent d. closed
Figure 3 Configurations of the hand that have been proposed for AmericanSign Language.
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 31

Handshapes like the one in figure 3a are [� bent, � hooked]. Hand-shapes like the one in figure 3b are [� bent, � hooked]. The handshapein figure 3c is [� bent, � hooked] and the handshape in figure 3d is[� bent, � hooked]. Phonetic similarity between certain handshapes isone motivation for having these handshapes share a feature. So figure 3aand figure 3b share the feature [� bent], and figure 3c and figure 3dshare the feature [� bent]. The question remains whether the phoneticobservations are phonologically significant in ASL, that is, whether thephonology treats as similar the handshapes that share [� bent] and thehandshapes that share [� bent].
Brentari (1990, 1998) cautions against relying too heavily on pho-netics when proposing features or a feature geometry, preferring to in-clude features that control distinctions made by the phonology ratherthan the phonetics. But Brentari makes reference to both perceptualand articulatory evidence for various proposals. Brentari (1990) ex-pressed the difference between the four configurations in figure 2 withtwo bivalent features, [peripheral] and [closed]. Figure 2a is [� periph-eral, � closed], figure 2b is [� peripheral, � closed], figure 2c is [� pe-ripheral, � closed], figure 2d is [� peripheral, � closed]. The feature[peripheral] has a perceptual basis. Brentari reasons that Lane, Boyes-Braem, and Bellugi’s (1976) work shows that there are more confusionsbetween bent or curved than, presumably, between open and closed.Thus, “we can assume that a person must spend more energy concen-trating in order to perceive them correctly” (Brentari 1990, 65). Hand-shapes such as figures 3a and 3d are [� peripheral] because they are atthe “extreme ends of the range of positions in ASL handshapes”(Brentari 1990, 65).
In Liddell and Johnson’s (1989) description of how these configu-rations (specifically figure 3b and 3c) differ, they discuss the “proximaljoint” and the “distal joint” (225). They explain that, in figure 3b, theproximal joint is extended while the distal joint is flexed and that, infigure 3c, the proximal joint is flexed while the distal joint is extended.The term proximal joint refers to the metacarpophalangeal joint (i.e.,knuckle), and distal joint refers to the proximal interphalangeal (PIP)
32 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 32

and distal interphalangeal (DIP) joints. The fact that Liddell and Johnsonmake reference to a distal joint (not joints) reveals their tacit under-standing that the proximal interphalangeal joint and the distal interpha-langeal joint work together, which is true, except in a few cases dis-cussed in chapter 2. This physiological fact, also written about in Uyechi(1996) and Mandel (1981), is encoded in linguistic theories in that a fea-ture that controls the distal interphalangeal joint and the proximal inter-phalangeal joint (each independently) has never been proposed.
Uyechi (1996) notes that the fingers and thumb are very differentphysiologically because of their respective joint structures. Sandler(1996), Liddell and Johnson (1989), Corina and Sagey (1989), Brentari(1990), and others also make this observation. Uyechi’s theory treats“fingers and thumb as distinct phonological constructs” (1996, 25).Uyechi provides a fairly detailed discussion of joints and, in so doing,comes up with the generalization that the distal and proximal interpha-langeal joints work together. Uyechi (1996) represents each finger andeach joint separately.
Mandel (1981) also describes what fingers are capable of doing bothindividually and with other fingers. His is not a feature proposal in thesame sense as the foregoing, though it is a thorough, persistent attemptto describe the phonetics of ASL. He proposes not only the adjacencyprinciple but also four anatomically based hierarchies to deal with fin-ger selection and configuration. The numbers of fingers hierarchy saysthat the least marked number of fingers working together in a handshapeis 0 or 4, regardless whether the handshape is closed or open. Figures 4aand 4b illustrate the closed and open handshapes. The next least markednumber of fingers in the hierarchy is 1. Examples of handshapes inwhich one finger does something are not provided in Mandel; presum-ably, they are handshapes such as the one in figure 4c. The next leastmarked number of fingers in the hierarchy is 2; presumably figure 4dwould be an example. The most marked number of fingers in a hand-shape is 3. Mandel claims three-fingered handshapes occur only inhandshapes such as that pictured in figure 4e. Mandel proposes no par-ticular physiological justification for the number of fingers hierarchy.
Contextualizing this Book 33
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 33
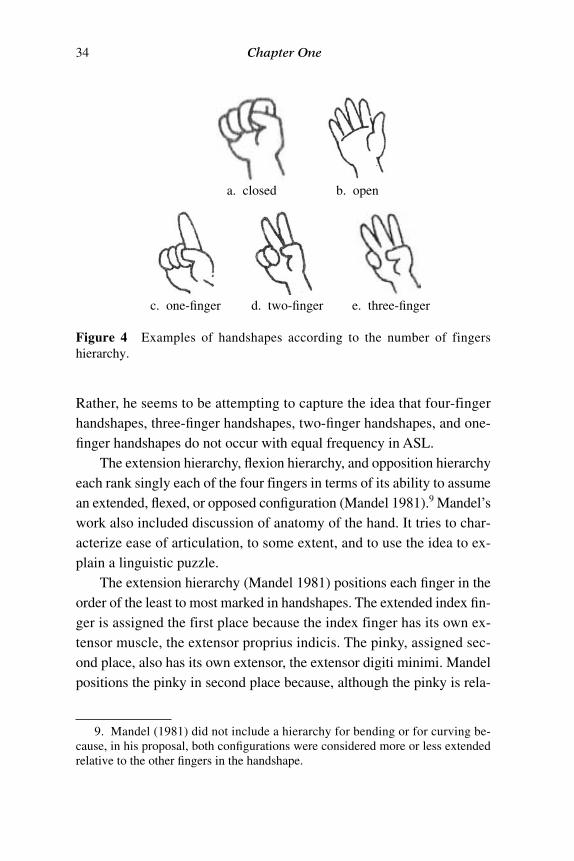
Rather, he seems to be attempting to capture the idea that four-fingerhandshapes, three-finger handshapes, two-finger handshapes, and one-finger handshapes do not occur with equal frequency in ASL.
The extension hierarchy, flexion hierarchy, and opposition hierarchyeach rank singly each of the four fingers in terms of its ability to assumean extended, flexed, or opposed configuration (Mandel 1981).9 Mandel’swork also included discussion of anatomy of the hand. It tries to char-acterize ease of articulation, to some extent, and to use the idea to ex-plain a linguistic puzzle.
The extension hierarchy (Mandel 1981) positions each finger in theorder of the least to most marked in handshapes. The extended index fin-ger is assigned the first place because the index finger has its own ex-tensor muscle, the extensor proprius indicis. The pinky, assigned sec-ond place, also has its own extensor, the extensor digiti minimi. Mandelpositions the pinky in second place because, although the pinky is rela-
34 Chapter One
c. one-finger d. two-finger e. three-finger
Figure 4 Examples of handshapes according to the number of fingershierarchy.
a. closed b. open
9. Mandel (1981) did not include a hierarchy for bending or for curving be-cause, in his proposal, both configurations were considered more or less extendedrelative to the other fingers in the handshape.
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 34

tively independent, it is “tied to the ring and through the ring, to the mid-dle” (Mandel 1981, 100). Mandel does not elaborate on the ties of thepinky to other fingers or their effects. The positioning of the middle asthe higher of the two remaining fingers is justified physiologically bythe fact that the middle finger is next to the index finger, which Mandel(1981) notes is very independent. Consequently, the ring finger is inthe final place.
The idea behind the opposition hierarchy follows similar logic. The“most opposable” finger is the index, with the middle next most oppos-able. The positions of the ring and pinky in the hierarchy are unclear be-cause the physiology does not suggest a clear answer. The ring fingeris closer to the thumb and therefore seems more opposable than thepinky. But the pinky, though farther away from the thumb, is equippedwith a muscle, the opponens digiti minimi, which helps it to oppose thethumb. Mandel leaves the ranking of ring and pinky unresolved.
Mandel’s (1981) independent flexion hierarchy governs the flexionof a finger without opposition. Mandel claims that the middle finger isthe freest in this regard. He notes that both the index and pinky havetheir relative extensors to hold them up and that the ring is tied by liga-mentous connections10 to other fingers. In contrast, the middle, thelongest finger, can reach out “far enough to be distinguished.” Mandelclaims that the index and ring are closely tied for the next position in thehierarchy. The pinky occupies the final place in the flexion hierarchybecause it is the least free, being tied to the ring. Mandel offers no morethan this information about the physiology of the fingers.
Mandel’s innovative (1981) work attempted an enormously com-plex task. He used physiology to explain linguistic puzzles. His workis a substantial contribution, though it is not complete enough to use asa basis for a model of ease of articulation.
Lane, Boyes-Braem, and Bellugi (1976) proposes distinctive fea-tures for ASL handshapes. It was modeled after the Miller and Nicely
Contextualizing this Book 35
10. The physiological literature suggests that Mandel’s “ligamentous ties” arethe juncturae tendinum; I discuss them in chapter 2.
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 35

(1955) study in which consonant sounds were presented in noise to sub-jects who were to discriminate them from one other. The fact that theywere presented in noise made it likely that the sounds would be con-fused. Miller and Nicely (1955) found that particular pairs of sounds aremore likely to be confused than other pairs. This result was taken tomean that, first, two sounds that were highly likely to be confused foreach other shared some features and, second, that the features that dis-tinguished the sounds that were confused were not very salient in thelanguage. Therefore, if a feature is salient, the sounds that differ on theabsence or presence of that feature will not be confused. Lane, Boyes-Braem, and Bellugi (1976) tested the likelihood that particular sets ofsimilar ASL handshapes would be confused for each other. They pre-sented subjects with handshapes in visual noise, making it likely that thesubjects would confuse the handshapes. The sets of handshapes thatwere most likely to be confused were analyzed as sharing features.Lane, Boyes-Braem, and Bellugi (1976) propose eleven features that de-scribe ASL handshapes. They speak of distinctive features as phono-logical features, and they clearly are concerned with not only phonologybut also psychology.
Stungis (1981) questioned the validity of Lane, Boyes-Braem,and Bellugi (1976) in two important ways. First, the results of Lane,Boyes-Braem, and Bellugi (1976) may not have been based on a largeenough number of trials. Second, they relied on the judgments of deafsigners who were not native signers of ASL. This fact is expected—on the basis of perception studies of spoken language such as Abra-ham and Lisker (1970), Miyawaki et al. (1975), and others—to sig-nificantly affect responses. Thus, Lane, Boyes-Braem, and Bellugi(1976) cannot be understood to reflect the actual perception of na-tive signers. Stungis overtly disavows any attempt to establish whatthe phonological features of ASL might be; rather, his use of the termdistinctive features refers to a visual cue that is a physical character-istic of the stimulus and that is sufficient for its recognition (Stungis1981). Stungis’s work did not challenge the idea in Lane, Boyes-Braem, and Bellugi (1976) that features could be based on percep-tual evidence.
36 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 36

Arrangement of features.
One proposal for a feature geometry for handshapes suggests an appealto physiology be made to explain the grouping of fingers in handshapes(Corina and Sagey 1989). The proposal is that because the index andmiddle fingers are referred to as radial fingers, they are dominated in ageometry by a “node” (an apex) called the radial node. Similarly, becausethe ring finger and the pinky are considered ulnar fingers, the ulnarnode would dominate the ring and pinky.11 This partitioning makes goodphysiological sense; as physiological evidence for the nodes, Corinaand Sagey (1988, 1989) claim that two different motor efferents (nerves)control the radial fingers and the ulnar fingers. They do not discuss thispoint further.
Another example of an appeal to the physiology related to featurecombinations is the case of [spread]. The feature [spread] controlswhether or not the fingers are spread apart or held together with no spacein between. Several restrictions on the application of [spread] are rele-vant. First, [spread] can apply only to more than one finger (Corina andSagey 1988). Speaking of one finger as spread or unspread makes littlesense because a finger can be spread only with respect to the others.Mandel (1981), working out a feature system for handshapes, notes thatthe middle finger stays stationary while the other four fingers spreadaway from it—thumb and index going in one direction and ring and pinkygoing in the other. Mandel (1981) encodes these physiological facts in histheory by proposing features such as [spread.index] but does not proposethe feature [spread.middle]. The second restriction on [spread] is that itcan occur only with extended or curved fingers but not with bent fin-gers.12 The physiological reason for this restriction on the application
Contextualizing this Book 37
11. Sandler’s (1989) feature geometry also includes an unnamed node thatdominated the index and middle fingers, which corresponds to Corina and Sagey’s(1988) radial node. However, Sandler (1989) offers no physiological justificationfor the node.
12. Kegl and Wilbur (1976) note that “the feature [spread] is relevant only to[� extended] handshapes; [� extended] handshapes are redundantly [� spread]”(392). I interpret the statement to mean in handshapes in which the fingers are closed,they are not spread; it is only possible for fingers to be spread if they are extended.
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 37

of [spread] was not explained in either Corina and Sagey (1988) or Man-del (1981). Ann (1992b, 1993a, and chapter 2 of this volume) explain thephysiology behind the fact that the only handshapes that can be spreadare those in which the metacarpophalangeal joint (knuckle) is not flexed.Chapter 2 makes clear why only the curved and extended configurationsare able to spread.
Brentari’s (1998) proposal is that the selected fingers branch of herfeature geometry has two sub-branches: joints and fingers. Separationof joints and fingers for selected fingers was first proposed in Hulst(1995). In Brentari (1998), class nodes of the prosodic branch arearranged from most distal to most proximal joints. She notes that “whatoften happens in the phonetic realization of a sign is that the move-ment migrates from the default joint of its particular movement type toa more proximal joint or a more distal one” (133). She refers to thisprocess as phonetic reduction, or distalization, and to phonetic enhance-ment as proximalization (Brentari 1998). She provides several exam-ples with various kinds of movement. An example with handshape (butnot movement) noticed by other researchers is that, in some signs, fin-gers can be extended at all joints or flexed at the metacarpophalangealjoint and extended at the PIP and DIP joints and still mean the samething whereas, in other signs, this variation cannot happen. Mandel(1982) provides the example of YOU, which can be signed with eitherwrist flexion or metacarpophalangeal joint flexion. Uyechi (1996) pro-vides the example of CONFLICT in which it is possible to distalize (fromthe wrist to the metacarpophalangeal joint) and MEET-YOU in which itis not. Brentari (1998) claims that representing orientation is quite com-plex because of the complexity of movement controlled by the jointsin the forearm and the wrist.
Sandler’s (1996) proposal considers the entire representation ofhandshape. Her proposal appears in figure 5. Of her proposal, Sandler(1996) observes that “the motivation is partly articulatory in the sensethat each class corresponds to an articulator. HC (hand configuration)corresponds to the whole hand, orientation to the palm, selected fin-gers to the fingers, and position to the joints of the fingers” (9).
38 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 38

The preceding discussion should demonstrate that the areas of fea-tures and their organization has afforded linguists a chance to make sig-nificant observations about articulation and perception. Now let us turnour attention to acquisition.
Issues Connected to Acquisition of Handshapes
Boyes-Braem’s (1981, 1990) work uses ease of articulation as an ex-planation for a linguistic puzzle, namely, the order of acquisition ofhandshapes by an American deaf child. To a lesser extent, her work alsoattempts to characterize ease of articulation based on anatomy. Shefound that the child acquired (i.e., was able to produce) handshapes infour stages. At Stage 1, the child acquired the “simplest” of handshapes.These involve the manipulation either of the hand as a whole or of the ra-dial fingers (which she considers the thumb and index finger). In Stage 2,the child acquired the least complex of the complex handshapes. InStage 3, the child began to manipulate the ulnar fingers (the middle, ring,and pinky fingers) separately rather than treat them as a unit (Boyes-Braem 1990), and as in stage 1, the middle, ring, and pinky fingers wereall either closed or extended. In Stage 4, the child learned to move all the
Contextualizing this Book 39
Figure 5 Sandler’s proposed entire representation of handshape. Reproducedfrom Sandler (1996, 117).
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 39

fingers one by one, including the weakest—the middle finger and thering finger. Handshapes used in Stages 1–4 are shown in figure 6.
Boyes-Braem (1990) explains these data as being a result of theanatomy of the hand. She includes some attention to muscles and someattention to the radial–ulnar distinction. Boyes-Braem also explains thatthe thumb, index, and pinky have extra muscles that the middle andring fingers do not have.
It is not clear why, as a group, the radial–ulnar distinction, not the in-dependent extensor distinction, is reflected in the handshapes that areacquired earliest. Though Boyes-Braem (1990) associates the order of
40 Chapter One
Figure 6 Boyes-Braem’s stages of handshape acquisition. From Volterra andErting (1994). Used by permission.
Stage 1
Stage 2
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 40
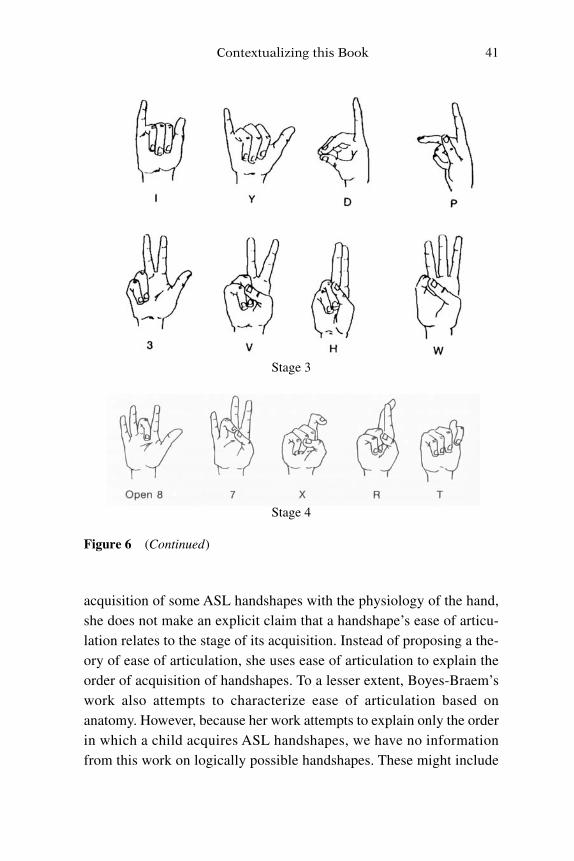
acquisition of some ASL handshapes with the physiology of the hand,she does not make an explicit claim that a handshape’s ease of articu-lation relates to the stage of its acquisition. Instead of proposing a the-ory of ease of articulation, she uses ease of articulation to explain theorder of acquisition of handshapes. To a lesser extent, Boyes-Braem’swork also attempts to characterize ease of articulation based onanatomy. However, because her work attempts to explain only the orderin which a child acquires ASL handshapes, we have no informationfrom this work on logically possible handshapes. These might include
Contextualizing this Book 41
Figure 6 (Continued)
Stage 3
Stage 4
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 41

(a) handshapes that are not attested (do not occur) in ASL but are attested(do occur) in other sign languages, (b) handshapes that are physicallypossible but not present in any sign language, and (c) handshapes thatare physically impossible. So it is not possible to construct a model fromBoyes-Braem (1973, 1981, 1990) alone.
McIntire (1977) examined acquisition to see what features mightexplain it. She concluded (but did not show) that, although features pro-posed by Boyes-Braem are useful in explaining the data, the proposal inLane, Boyes-Braem, and Bellugi (1976) is more appropriate.
McIntire (1977) gathered data from a series of videotaped playsessions in the home of a deaf child of Deaf parents and grandpar-ents, all of whom used ASL. She examines the hypothesis that thereexist “at least two steps in the order of sign language development”(249). This hypothesis is based on the observation that “pointing andgrasping are the functions most commonly served by the human hand”(249). The pointing index finger and the action of grasping seem verycommon in sign languages, too. But McIntire points out that sign lan-guages require the “independent manipulation” of the middle, ring,and pinky fingers, which, she notes, “is acquired comparatively late indevelopment” (249).
Both Boyes-Braem (1973) and McIntire (1977) reason that the ma-nipulation of the thumb and index finger come before the manipulationof the rest of the fingers developmentally and, therefore, that acquisitionof handshape occurs in two stages—what might be called the radialstage and the ulnar stage. McIntire summarizes her model as follows:
The sequence suggested by the model is based on the gradually in-
creasing ability both physical and cognitive of the child to control
the weaker fingers, making possible the positive specification (pro-
duction) of more and more “difficult” features. The prediction there-
fore is that signs requiring a dez (handshape) in a stage beyond the
baby’s performance abilities . . . will be signed by using as substi-
tutes dez (handshapes) within her capabilities. . . . In this model it is
also predicted that no dez from a later stage will substitute for a dez
from an earlier stage. (1977, 250)
42 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 42

McIntire finds some patterns that are not consistent with Boyes-Braem, but Boyes-Braem’s basic hypothesis (i.e., that the dez hand-shapes requiring control of the thumb and index finger or the wholehand will develop before others) is sustained (McIntire 1977). Virtu-ally all of McIntire’s (1977) corpus (182 of 186 substitutions) is com-posed of handshapes from Boyes-Braem’s Stage 1. McIntire’s worktries to use ease of articulation as at least a partial explanation for a lin-guistic puzzle, but from this work alone, it would not be possible tobuild a model of ease of articulation such as the one I propose here.
Siedlecki and Bonvillian, in two separate studies (Bonvillian andSiedlecki 2000; Siedlecki and Bonvillian 1993), gathered data on the ac-quisition of ASL handshapes by deaf children. They videotaped hear-ing and deaf children, who were native signers, in conversation withtheir sign-using parents. They collected token frequencies of errors ofthese children, and they showed that during the acquisition process,children got a sign’s location and movement correct more often than itshandshape. From these data, they concluded that handshape is the mostchallenging parameter of a sign to acquire.
Meier et al. (1998) investigated whether the natural course of mo-tor development in infants influenced early sign acquisition. Theyfound three principles that may account for “certain broad patternsthat we have detected in young children’s articulation of their firstsigns” (70):
1. “Fine motor control over small muscle groups (e.g., those in the
hand) lags behind gross motor control over large muscle groups
(e.g., those in the shoulder or arm)” (64).
2. “Development of motor control generally proceeds from proximal
articulators (e.g., the shoulder) to distal ones (e.g., the wrist and
fingers), where ‘proximal’ and ‘distal articulators’ are defined by
distance from the torso” (64).
a. “. . . [I]f a child uses a joint that would not be anticipated in the
adult citation-form sign, that joint will likely be proximal to
the most proximal of the expected joints” (67).
Contextualizing this Book 43
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 43
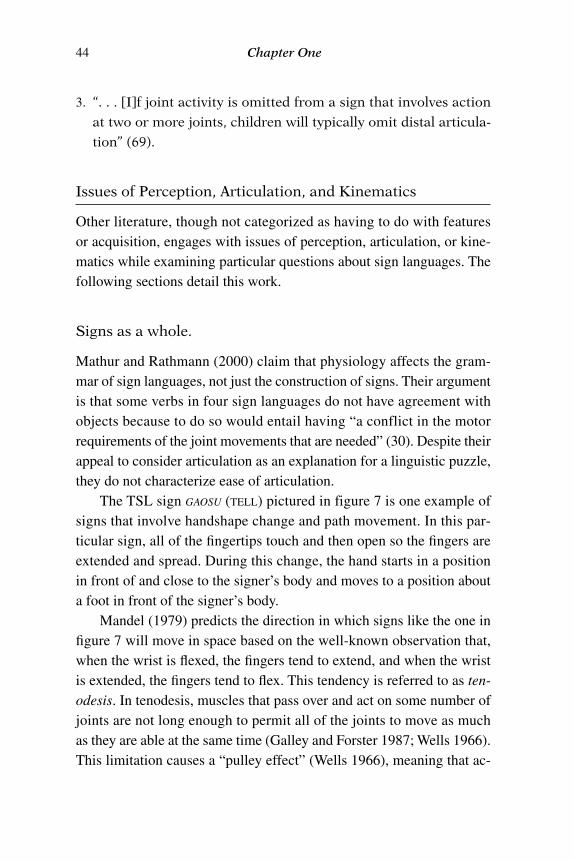
3. “. . . [I]f joint activity is omitted from a sign that involves action
at two or more joints, children will typically omit distal articula-
tion” (69).
Issues of Perception, Articulation, and Kinematics
Other literature, though not categorized as having to do with featuresor acquisition, engages with issues of perception, articulation, or kine-matics while examining particular questions about sign languages. Thefollowing sections detail this work.
Signs as a whole.
Mathur and Rathmann (2000) claim that physiology affects the gram-mar of sign languages, not just the construction of signs. Their argumentis that some verbs in four sign languages do not have agreement withobjects because to do so would entail having “a conflict in the motorrequirements of the joint movements that are needed” (30). Despite theirappeal to consider articulation as an explanation for a linguistic puzzle,they do not characterize ease of articulation.
The TSL sign GAOSU (TELL) pictured in figure 7 is one example ofsigns that involve handshape change and path movement. In this par-ticular sign, all of the fingertips touch and then open so the fingers areextended and spread. During this change, the hand starts in a positionin front of and close to the signer’s body and moves to a position abouta foot in front of the signer’s body.
Mandel (1979) predicts the direction in which signs like the one infigure 7 will move in space based on the well-known observation that,when the wrist is flexed, the fingers tend to extend, and when the wristis extended, the fingers tend to flex. This tendency is referred to as ten-odesis. In tenodesis, muscles that pass over and act on some number ofjoints are not long enough to permit all of the joints to move as muchas they are able at the same time (Galley and Forster 1987; Wells 1966).This limitation causes a “pulley effect” (Wells 1966), meaning that ac-
44 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 44
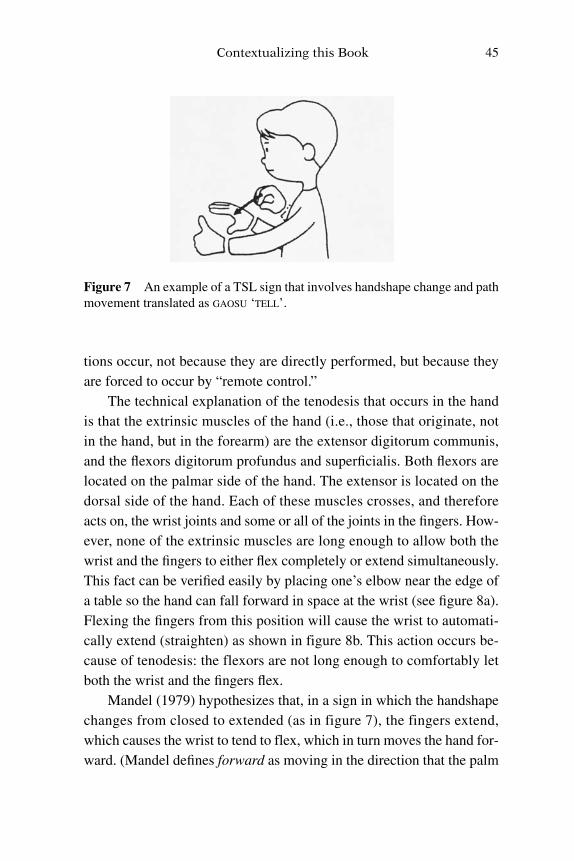
tions occur, not because they are directly performed, but because theyare forced to occur by “remote control.”
The technical explanation of the tenodesis that occurs in the handis that the extrinsic muscles of the hand (i.e., those that originate, notin the hand, but in the forearm) are the extensor digitorum communis,and the flexors digitorum profundus and superficialis. Both flexors arelocated on the palmar side of the hand. The extensor is located on thedorsal side of the hand. Each of these muscles crosses, and thereforeacts on, the wrist joints and some or all of the joints in the fingers. How-ever, none of the extrinsic muscles are long enough to allow both thewrist and the fingers to either flex completely or extend simultaneously.This fact can be verified easily by placing one’s elbow near the edge ofa table so the hand can fall forward in space at the wrist (see figure 8a).Flexing the fingers from this position will cause the wrist to automati-cally extend (straighten) as shown in figure 8b. This action occurs be-cause of tenodesis: the flexors are not long enough to comfortably letboth the wrist and the fingers flex.
Mandel (1979) hypothesizes that, in a sign in which the handshapechanges from closed to extended (as in figure 7), the fingers extend,which causes the wrist to tend to flex, which in turn moves the hand for-ward. (Mandel defines forward as moving in the direction that the palm
Contextualizing this Book 45
Figure 7 An example of a TSL sign that involves handshape change and pathmovement translated as GAOSU ‘TELL’.
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 45

is facing.) Conversely, in a sign with a handshape change from extendedto closed, the fingers flex, which causes the wrist to extend, whichmoves the palm backward (in the direction that the back of the hand isfacing). Mandel’s investigation of Stokoe, Casterline, and Croneberg’sDictionary of American Sign Language (1965) reveals that of the sixty-two signs with (a) either opening or closing of the fingers and (b) pathmovement through space, forty-six signs favor tenodesis and only six-teen oppose it (Mandel 1979). Mandel’s (1979, 1981) work makes an at-tempt both to characterize ease of articulation and to use it to solve lin-guistic puzzles.
Loncke (1984) suggests that kinesiology plays a role in severalphonological characteristics of Belgian Sign Language. First, Lonckenotes that it is highly predictable that signs produced in the signingspace will more likely have flexion, abduction, and inward rotation thanother combinations of movements or single movements. Second, Lonckenotes that, in one-handed signs that are articulated in areas either to theleft or to the right of the signing space, the preferred direction of move-ment is contralateral to ipsilateral. This preference holds true for right-handed and left-handed signers. Third, circular movements in signs tendto go in the same direction no matter in which plane (horizontal, vertical,or sagittal) they occur. Even nonsigners who were asked to produce a signafter hearing a description that did not include instructions on whichway to make the circular movement respected the directionality that
46 Chapter One
a. b.
Figure 8 Demonstration of tenodesis. Drawings by Sarah Mahan.
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 46
signers used. In his explanation of what could account for these data,Loncke (1984) concludes that they must be attributable to what is mostcomfortable. Although all of Loncke’s observations are interesting, theyare not explored in any greater detail, and no attempt is made to deter-mine exactly what makes some movements easier or more comfortable.
Taking another tack, Siple (1978) relates several aspects of the lex-icon of ASL to visual constraints. Specifically, she claims that differentareas of the signing space have a high or low degree of visual acuity. Atwhat she calls the “point of fixation,” acuity is best (1978, 97). As thedistance between the sign and the point of fixation increases, acuity de-creases. If we assume that the fixation point for signers is the face, thenthe area around the face is a high visual acuity area. The area aroundthe waist, then, would be a low visual acuity area. Siple predicts thatpairs of signs that look very similar will be produced in the high acuityareas of the signing space because they will be easy to distinguish. Sipledefines visually similar signs as being almost identical signs, except forsmall distinctions such as a different location or handshape. Visuallysimilar signs will be produced in areas that are easy to see, and visuallydifferent pairs of signs will be produced in areas that are harder to see.Siple (1978) claims that the data in Stokoe, Casterline, and Croneberg(1965) confirm her predictions, but she does not cite the actual data.
Wilcox (1992) notes that several studies have examined the kine-matics of ASL movement rather than ASL handshape. These studieshave unearthed some interesting conclusions that bear on sign phonetics.
From a series of studies concerned with the perception of movementprimarily, we have a beginning understanding of the importance ofhandshape to a sign. Poizner, Bellugi, and Lutes-Driscoll (1981) used atechnique of representing human motion as points of light. They used apoint-light display in which signers’ heads as well as various joints inthe hand and arm were illuminated. The experimenter’s room was dark-ened so only the lights were visible. The experimenters tried to find outwhether signers could recognize signs represented as point-light dis-plays as well as they could recognize signs signed normally on video-tape. In some cases, they removed particular lights from the stimuli.
Contextualizing this Book 47
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 47
From their experiments, Poizner, Bellugi, and Lutes-Driscoll (1981)concluded that “in general, the more distal the joint of the arm, the moreinformation is carried for sign identifiability” (432). Poizner, Klima, andBellugi (1987) reported that “movement of the fingertips—though notany other pair of points is necessary for sign identification” (25). In an-other study, Poizner (1983) compared the responses of native ASL sign-ers and those of hearing people with no knowledge of ASL. Deaf andhearing subjects did not differ in their responses to certain aspects ofmovement such as its direction and repetition and cyclicity; in otherwords, on the issue of the effect of linguistic experience on certain typesof judgments, there is no difference between deaf and hearing signers.
Lupton and Zelaznik (1990) try to shed light on how skills in usingASL are developed. They do kinematic measurements at two distinctpoints in time of the movements of two hearing subjects who werelearning ASL as a second language and who had had no previous expo-sure to ASL (other than what they had been exposed to the semesterthe study was done). They conclude that, as a result of practice, learn-ers get better at producing ASL because they learn to produce it withcoarticulated movements. Though there were differences between thesubjects, their movements generally became more constrained and re-producible. One of the conclusions reached by Lupton and Zelaznik(1990) is that the target position, not the movement amplitude, “pro-vides the greatest amount of linguistic information in ASL” (169). Lup-ton and Zelaznik’s (1990) study concerns the learning of ASL as a sec-ond language; time will tell whether it and other studies like it havesomething of value to say about the structure of ASL.
Brentari (1998) proposes that both hands need to be represented intheories of phonology. Part of her evidence for this assertion is the exis-tence of weak drop. Weak drop (Padden and Perlmutter 1987) is a ruleproposed to account for an asymmetry: the weak hand can be droppedaltogether in certain signs but not in others. Brentari notes that this rulebears on “phonological economy” (1998, 248).
In addition, Brentari (1998) discusses prosodic complexity as visualsonority. Among her claims for sonority in sign languages is that “the
48 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 48

degree of sonority is correlated with the proximity to the body of thejoint articulating the sign gesture to the body; the more proximal thejoint articulating the movement is to the midline of the body, the greaterthe degree of sonority” (216–17).
Brentari defines sonority in terms of both perception and articula-tion. With respect to perception, sonority is defined as “the property thatenhances the ability of a property of a sign to be perceived at greater dis-tances; in this regard, perceiving a property of a sign, discriminating itfrom other similar properties, and identifying it are taken to be sepa-rate operations in the act of comprehension,” and with respect to artic-ulation, sonority is “defined and measured on the basis of the joint(s)used to articulate a single movement” (1998, 27–28).
Handshape.
Wilcox (1992) is not concerned with the articulation or perception ofhandshapes but, rather, with handshape kinematics—which correspondswith the acoustics of speech. His study of the acoustic phonetics of fin-gerspelling is the nearest we have come to discovering the kinematicproperties of handshapes. Fingerspelling is relevant to a phonetics ofhandshape because fingerspelling involves the rapid transmission ofhandshapes, each of which corresponds to a letter of the alphabet. Ann(1993b) notes that Wilcox’s examination of fluent and nonfluent fin-gerspelling yields several conclusions: (a) speed is not a factor in pro-ducing fluent fingerspelling, (b) peak velocity occurs in the transitionsof fingerspelled words, (c) the behavior of the fingers and hand are tem-porally synchronized in fluent fingerspelling but not in disfluent finger-spelling. It is not clear, however, whether these conclusions point to con-straints on handshapes or constraints on sign languages in general.
In a study of coarticulation across ASL signs, Cheek (2001) ex-plores a phenomenon she refers to as handshape variation—the observa-tion that the same handshape is not always produced in precisely the sameway. She notes that other researchers (Klima and Bellugi 1979; Wilbur1987; Liddell and Johnson 1986, 1989; Sandler 1993) have noticed that
Contextualizing this Book 49
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 49

the handshape of a previous sign can affect the handshape in a followingsign. She points out that “these discussions do not distinguish betweenphonetic patterns of coarticulation and phonological patterns of assim-ilation” (Cheek 2001, 9).
Cheek’s work attempts to resolve this ambiguity by using quantita-tive kinematic data to get more information about the exact nature ofvariation. She examines finger extension in a few phrases with the ASLhandshapes 5 and 1. In the ASL phrase TRUE SMART (really smart), TRUE
is articulated with a 1 handshape, and SMART is articulated with a1 handshape. In the phrase TRUE MOTHER (real mother), TRUE (articulatedwith the 1 handshape) is followed by MOTHER, which is articulated witha 5 handshape. Cheek tries to ascertain whether the 1 handshape inTRUE looks any different in the phrase TRUE SMART than it does in thephrase TRUE MOTHER. Her experimental results show that the precedingand following sign “systematically affect the production of the indexhandshape in the dominant hand as well as the relaxed handshape ofthe nondominant hand” (Cheek 2001, 196). Cheek’s work shows thatthe phenomenon she explores is not phonological but phonetic. She con-cludes that “the principles of economy are clearly at work in sign justas they are in speech” (2001, 209).
When hearing people perceive linguistic sounds, they do not per-ceive only one discrete stimuli as a particular sound. Rather, they iden-tify sounds along a continuum to be the same sound. The stimuli thatthey perceive to be the same sound has to do with their native languageand with their linguistic experience with the sound contrast being tested.This phenomenon is known as categorical perception. Baker (2003)studied whether a linguistic system constrained the perception of onlyspeech or whether the same effects happened for “processing stimulithat were not speech” (2).
In her study, Baker (2003) investigated whether hearing and deafadults perceived handshapes categorically, that is, whether there is a“linguistic, as opposed to a purely perceptual, basis for the processingof linguistic contrasts that are visual” (3). Baker’s hypothesis was that,if both hearing subjects (with English as a native language) and deaf sub-
50 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 50

jects (with ASL as a native language) had categorical perception of hand-shapes, then some general perceptual mechanism was at play. If onlythe deaf group had categorical perception, then the result of linguistic ex-perience in perceiving handshapes was significant. Baker reasoned that,if linguistic experience plays a role in constraining the perception of theASL contrasts, then language has its own system-specific perceptualmechanism focused on the phenomenon of categorical perception.
To test her hypothesis about ASL in general, Baker focused on fig-uring out whether deaf ASL signers and hearing nonsigners exhibitedcategorical perception as they viewed three pairs of handshapes. Sub-jects had an identification task and a discrimination task that had to dowith handshapes. The results of the identification task suggested thatthere was no categorical perception; both the hearing and the deaf sub-jects grouped handshapes in the same way. However, the result of thediscrimination task suggested that the deaf subjects did categoricallyperceive handshapes and the hearing subjects did not. Although Baker(2003) was not attempting to test any linguistic hypotheses, she notesthat her research has implications for Brentari et al. (1996), who pro-pose various features for handshapes: “The deaf adults were indeedprocessing the handshapes in terms of their component features”(Baker 2003, 89).
Moy (1990) observes a parallel between progress in spoken lan-guage phonology and sign language phonology: much of the phono-logical research on ASL until 1990 tried to explain phonological puzzlesby considering only evidence gleaned from what people signed. In otherwords, the evidence came from the language itself (language-internalevidence). In his research, Moy instead took a psycholinguistic approach.His question had been a long-standing one. Stokoe, Casterline, andCroneberg (1965) and Stokoe (1978) claimed that the handshapes in fig-ure 9 were allophones of one another. Allophones are handshapes that,when replaced by each other in a given sign, do not result in a meaningdifference, although they may make the sign look unusual or “funny”to a native signer. Moy tests the specific claim that the handshapes in 9a,9c, and 9d are allophones. On the basis of psycholinguistic evidence
Contextualizing this Book 51
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 51

(subjects’ response to a concept formation test), he finds that the hand-shapes in figures 9c and 9d were not considered the same thing by sub-jects and therefore should not be considered allophones of one another.However, subjects saw the handshapes in figures 9a and 9c as the samething, and therefore they can be considered allophones.
Frequency of occurrence.
In sign language research, the few studies that deal with frequency donot conceptualize their questions or data as some functional linguistsmight. Woodward (1982, 1985, 1987), essentially using dictionary data,examined the frequency of particular handshapes across ten sign lan-guages. He looked at handshapes involving what he called (a) single-fin-ger extension—handshapes in which one finger is extended with the restof the fingers closed; (b) two-finger extension—two fingers extended
52 Chapter One
a. The handshape in ASL 10 b. ASL fingerspelled T
c. ASL fingerspelled A d. ASL fingerspelled S
Figure 9 ASL allophones. Figures b and c are from Tennant and Brown(1998).
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 52

with the rest closed; and (c) single-finger contact—handshapes in whichone finger contacts the thumb. (See figure 10.)
After analyzing his data, Woodward made the following observa-tions about handshapes:
• The extended index finger occurs in all of the sign languages. The extended
ring finger occurs in only one of the sign languages.
• The extended index finger occurs in a relatively large percentage of signs,
compared, for example, with the extended ring finger, which occurs in a tiny
percentage of signs.
• Single-finger extension handshapes occur more commonly than two finger
extended handshapes.
• Single-finger extension handshapes are more common than handshapes in
which a single finger contacts the thumb.
Woodward’s observations alone were a great contribution when theywere made, but the issue of generating an explanation for these obser-vations was never examined.
Sandler (1996) in a discussion of markedness reports some statisticsfrom Israeli Sign Language (ISL). She has two sources of data on at-tested handshapes in ISL. First, she calculates their order of frequencyin the dictionary, and second, she calculates their order of frequency ina small corpus of relatively natural signing.
Contextualizing this Book 53
single-finger extension
single-finger contact
two-finger extension
Figure 10 Types of handshapes analyzed by Woodward.
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 53
Morford and McFarlane (2003) describe a preliminary study onsign frequency in ASL. A database of 4,111 signs that were signed invarious discourse contexts by twenty-seven signers was considered.The questions asked about the database did not concern handshape. Onequestion was concerned with discovering the most frequent “signtypes”; investigators distinguished between frozen signs, classifiers, fin-gerspelled signs, etc. An interesting finding was that the category ofsigns we think of as classifiers comprised a very small percentage ofsigns in the database: 4.2 percent. A related finding was that genre (for-mal, casual, or spontaneous narrative) affected the percentages of signtypes found in the corpus. For example, classifier constructions weremuch more common in narratives than in casual or formal signing.None of these conclusions could have been drawn in the absence of astudy about frequency.
With the exception of Bonvillian and Siedlecki (2000) and Siedleckiand Bonvillian (1993), discussed earlier in this chapter, Ann (1993a) andAnn (1996) are the only other works to have dealt with frequency. BothAnn (1993a) and Ann (1996) were concerned with type frequency ofhandshapes in two unrelated sign languages, ASL and TSL. Both stud-ies used as data all the handshapes listed in the Smith and Ting (1979,1984) glossaries for TSL and in the Dictionary of American Sign Lan-guage (Stokoe, Casterline, and Croneberg 1965) for ASL. Both studiestried to explain frequency of occurrence data by making an appeal toease of articulation; both studies conceptualized frequency as a condi-tion in which a handshape occurs more often than expected. What wasexpected was calculated by means of a mathematical formula.
The present work differs from Ann (1993a, 1996) in four ways.First, neither Ann (1993a) nor Ann (1996) couched the discussion of fre-quency and ease of articulation in functionalist theory. This work takespains to contextualize the questions dealt with here by placing them inthe context of functionalist theory. Second, both Ann (1993a) and Ann(1996) ascertained frequency in only one way: both studies examinedonly type frequency ascertained from dictionary entries. This work, evenmore so than Ann (2005), expands that attempt by also examining con-
54 Chapter One
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 54
versational data. Ann (2005) reports on type frequencies for handshapesin TSL from a mini-corpus of a few minutes of signing taken from aTaiwanese television show in which two native signers converse. Third,the conception of frequency of occurrence is different here than it was inAnn (1993a) and Ann (1996). Here, I calculate frequency in a muchmore straightforward way. Frequency is a matter of how many times ahandshape occurs, not whether it is expected to occur in a conversation.Finally, Ann (1993a) and Ann (1996) were concerned with comparingdata from two sign languages whereas this work, because of the focus ongreatly expanding the database, examines only TSL in detail.
Contextualizing this Book 55
ch01_8033_JeanAnn_Gallaudet 9/5/06 9:57 AM Page 55

Chapter Two
The Anatomy and Physiology of the Human Hand
First developing an understanding of the anatomy and physiology of thehuman hand and the relevance of each to handshapes will enable thereader to follow the theory I propose with respect to ease of articula-tion for handshapes. Although I adhere to the standard distinction be-tween anatomy (i.e., the description of parts of the body and their po-tential for movement) and physiology (the study of how the parts moveand interact) (Galley and Forster 1987), my discussion of the two areaswill be intertwined.
The anatomy and physiology of the human hand are tremendouslycomplicated; therefore, making hard and fast conclusions about all as-pects of physiology is unwise (and maybe even impossible). Enormousfields of study such as anatomy, physiology, and biomechanics are en-gaged in the task of understanding how the human body works (Wells1966). Discoveries made in these areas alter previous paradigms, andconsequently, aspects of both anatomy and physiology are still not wellunderstood. For example, variation exists across humans with respect tothe number and arrangement of extensor tendons (Schenck 1964).
Beyond anatomy, the precise functions of anatomical structures arenot necessarily clear. For example, questions still arise as to whichsmaller movements combine to form a larger movement and whichmuscles participate (and how much) in executing particular movements(Wells 1966)—questions that are particularly important here. Differentmuscle groups might work together to achieve a given movement,
56
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:07 AM Page 56
though one muscle might be primarily responsible. But in another move-ment, the same muscles might participate in different ways. So, a givenmuscle might act as a prime mover (i.e., actually doing some action) inone movement, as an antagonist (i.e., permitting the action by relax-ing) in another, and as a synergist (i.e., helping the prime mover to com-plete the action) in a third. To complicate matters, in accomplishing anaction, a prime mover or a synergist may participate minimally (say,only 10–20 percent) or maximally (say, 80–100 percent).13 Clearly then,it is impossible to say that a given muscle is a prime mover, an antago-nist, or a synergist because it may function as a prime mover for onemovement, as an antagonist for another, and as a synergist for a third.
A thoroughly detailed explanation of the muscles of the hand andthe movements they accomplish is far too complex to be dealt with ap-propriately here. Nevertheless, some understanding of the physiology ofthe hand and forearm is critical for us to begin to understand its rela-tionship to sign language handshapes. Therefore, for my purposes here,I make two reasonable assumptions that serve to simplify my task. First,I assume that there exists a “canonical,” or standard hand, the structureand functions of which I outline throughout this chapter. Second, al-though kinesiologists are still unraveling the mysteries of how the hu-man hand moves, my hypotheses concern the movements that particularmuscles allow on the basis of the positioning of a muscle, the effects ofother soft structures in the hand, and the effects of the joint structures formovement.
The question of which aspects of the physiology are in fact rele-vant for handshapes is a reasonable one. For example, the hand mayact as a whole (i.e., all five fingers together), or some subset of fingersmay group together in extension while the others remain closed to thepalm. So what each individual finger can do and what the hand as a
The Anatomy and Physiology of the Human Hand 57
13. Because, anatomically and physiologically, the thumb both resembles anddiffers from the other four fingers, the need sometimes arises to distinguish thethumb from the rest of the fingers. Throughout the chapter, my use of the phrase thefive digits should be interpreted as including the thumb and four fingers. The phrasethe fingers should be interpreted as excluding the thumb.
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:07 AM Page 57

whole can do is relevant to handshapes. Therefore, my discussion cen-ters on the bones of the hand and wrist, the joints, and the muscles andother soft structures.
THE BONES OF THE HAND
The hand and the wrist contain twenty-seven small bones: fourteen pha-langes, five metacarpals, and eight carpal (wrist) bones (see figure 11).In the following sections, I discuss the bones of the fingers, hand, andwrist in turn. I will use the terms proximal and distal to refer to relativelocations on the body: proximal means closer to the trunk of the body,and distal means farther from the trunk of the body.
FINGERS
Each of the digits is made up of small bones called the phalanges. Thereare fourteen phalanges in the human hand. The four fingers have threephalanges each, known as the distal phalanx, the medial phalanx, and
58 Chapter Two
Figure 11 Bones of the hand. Adapted from Napier 1980, 29.
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:07 AM Page 58

the proximal phalanx. The distal phalanx is located near the tip of eachfinger. The proximal phalanx is located near the metacarpophalangealjoint (or knuckle) of each finger. The medial phalanx is the bone be-tween the proximal phalanx and the distal phalanx. The thumb has twophalanges: the proximal phalanx (near the knuckle) and the distal pha-lanx (near the tip).
HAND
The skeleton of the palm, the metacarpus, consists of five bones calledmetacarpals, labeled 1–5 in figure 11. Each metacarpal attaches to theproximal phalanx of each respective digit. The first metacarpal is that ofthe thumb, the second metacarpal is that of the index, and so on. Themetacarpal heads are the distal ends of the metacarpal bones, in otherwords, the ends of each metacarpal bone that are closest to the proxi-mal phalanx (Romanes 1981).
WRIST
The eight bones of the wrist (the carpal bones) can be divided into tworows, a distal row (located on the hand side of the wrist) and a proxi-mal row (located on the forearm side of the wrist). The distal row ofcarpal bones from right to left in figure 12 are the hamatum, capitatum,multangulum minor, and multangulum major. The proximal row ofcarpal bones from right to left are the pisiform, triquetum, lunatum,and navicular. The distal ends of the two bones in the forearm, the radiusand the ulna, are attached to the proximal row of carpal bones.
JOINTS
At a joint, two bones meet. Understanding the nature of the joints inthe hand will help us see their relevance for sign language handshapes.One classification organizes joints into those with a space between thetwo bones and those without a space between the two bones (Wells
The Anatomy and Physiology of the Human Hand 59
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:07 AM Page 59
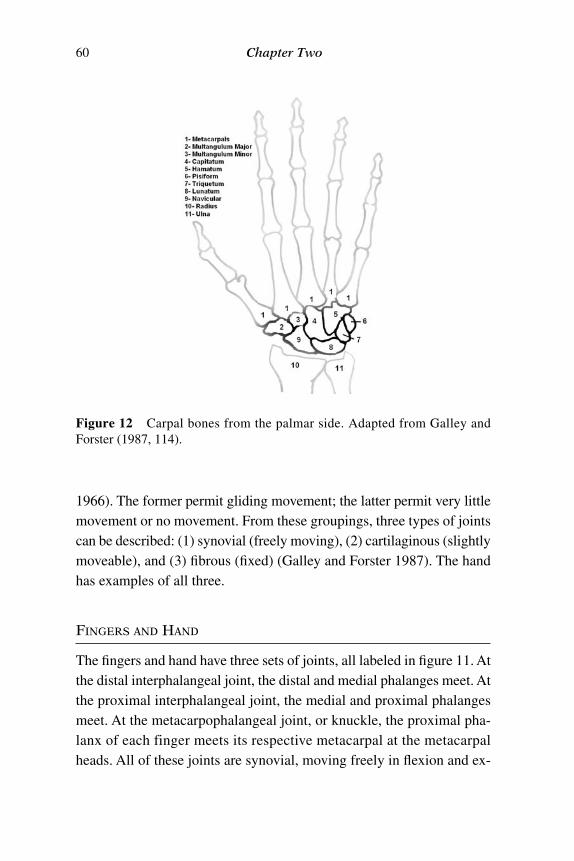
1966). The former permit gliding movement; the latter permit very littlemovement or no movement. From these groupings, three types of jointscan be described: (1) synovial (freely moving), (2) cartilaginous (slightlymoveable), and (3) fibrous (fixed) (Galley and Forster 1987). The handhas examples of all three.
FINGERS AND HAND
The fingers and hand have three sets of joints, all labeled in figure 11. Atthe distal interphalangeal joint, the distal and medial phalanges meet. Atthe proximal interphalangeal joint, the medial and proximal phalangesmeet. At the metacarpophalangeal joint, or knuckle, the proximal pha-lanx of each finger meets its respective metacarpal at the metacarpalheads. All of these joints are synovial, moving freely in flexion and ex-
60 Chapter Two
Figure 12 Carpal bones from the palmar side. Adapted from Galley andForster (1987, 114).
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:07 AM Page 60

tension. In addition, the metacarpophalangeal joints of the four fingerspermit abduction and adduction (spreading apart and coming together).
HAND AND WRIST
The wrist has four sets of joints. These are the carpometacarpal joints,the midcarpal joints, the intercarpal joints, and the radiocarpal joint.Proceeding from the distal to the proximal joints, the carpometacarpaljoint is where the metacarpals meet the distal row of carpal bones. Themidcarpal joints and the intercarpal joints are within the wrist itself. Themidcarpal joints are those that connect the four carpal bones in the prox-imal row with the four carpal bones in the distal row. The intercarpaljoints are between adjacent carpal bones in both rows (Wells andLuttgens 1976). The radiocarpal joint is where the bones of the forearm,the radius and the ulna, meet the proximal row of carpal bones. Mostof these joints are cartilaginous, permitting only slight movements. To-gether, however, they allow wrist movements of flexion, extension,hyperextension, radial flexion (moving the wrist to the right), ulnar flex-ion (moving the wrist to the left), and circumduction.
For our purposes, the carpometacarpal joints (labeled in figure 11)are the most interesting. We can productively examine the five carpo-metacarpal joints in three groups: the carpometacarpal joint of thethumb, the carpometacarpal joints that distally attach to the index andthe middle fingers, and those that distally attach to the ring and thepinky. The thumb’s carpometacarpal joint, sometimes called a “saddlejoint,” is synovial. In fact, the first metacarpal is the most mobile of thefive at the carpometacarpal joint and permits not only the movementsnecessary to produce sign language handshapes but also a number ofother movements. The carpometacarpal joints of the four fingers areextremely interesting for our purposes. The construction of these jointsvaries in ways that have important implications for sign language hand-shapes. The carpometacarpal joints of the second and third metacarpalsare fibrous or fixed, rendering the second and third metacarpals immo-bile. In contrast, the carpometacarpal joints of the fourth and fifth
The Anatomy and Physiology of the Human Hand 61
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:07 AM Page 61

metacarpals are cartilagenous, making them slightly moveable. Thefibrous parts of the hand are pictured in figure 13.
The following two exercises help demonstrate the difference be-tween the attachments of the second and third metacarpals and thefourth and fifth metacarpals at the carpometacarpal joint. First, take afriend’s hand with fingers facing toward you and palm down. Using bothof your hands, grasp the second and third metacarpal of your friend’shand with your thumb on the dorsal side of the hand and your indexfinger on the palmar side. Attempt to push down (toward the floor) onone metacarpal while pulling upward (toward the ceiling) on the other.You will see that it is not possible to move the second and thirdmetacarpals. Now, grasp the fourth and fifth metacarpals, and try thesame thing. You will quickly see that, quite in contrast with the secondand third metacarpals, these are permitted plenty of movement.
62 Chapter Two
Figure 13 The fixed (fibrous) parts of the hand. Adapted from Galley andForster (1987, 215) and Napier (1980, 29).
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:07 AM Page 62
Next, lay a pencil across the open flat hand, and make a fist hold-ing the pencil. Notice the difference between the way the index andmiddle fingers grip the pencil and the way the ring and pinky grip thepencil. The index and middle simply wrap around the pencil, steadyingit on the radial (thumb) side. The ring and pinky cup around the pencilsteadying it on the ulnar (pinky) side. This cupping action occurs be-cause the ring and pinky metacarpals are mobile at the carpometacarpaljoint; if they were not, they could not grip the pencil as tightly and thepencil would be loose on the ulnar side of the hand. It should be clearby now that the different behavior of the second and third metacarpalscompared with the fourth and fifth metacarpals is attributed to their verydifferent carpometacarpal joint structures.
To summarize, the wrist and hand have synovial, cartilagenous, andfibrous joints. The synovial joints are the distal interphalangeal joints,the proximal interphalangeal joints, the metacarpophalangeal joints, theradiocarpal joint, and all of the joints of the thumb. The cartilaginousjoints are the ring and pinky carpometacarpal joints, the midcarpaljoints, and the intercarpal joints. The fibrous joints are the index andmiddle carpometacarpal joints. The next section will consider what im-plications this anatomy has for sign language handshapes.
THE PHYSIOLOGICAL RESULT OF THE ANATOMY OF THE CARPOMETACARPAL JOINTS
We have seen that the index and middle metacarpals are anatomicallyimmobilized at the carpometacarpal joint. The ring and pinky meta-carpals are permitted a small degree of mobility at the carpometacarpaljoint. The physiological result is that an asymmetry exists between theradial fingers and the ulnar fingers at the carpometacarpal joint. Thisasymmetry renders the radial fingers more able to perform precisionmovements than the ulnar fingers. This fact may seem counterintuitivebecause, at the carpometacarpal joint, the index and middle are the fin-gers that are fixed whereas the ring and pinky are slightly moveable. Infact, the explanation for this capacity comes from the fact that, to per-
The Anatomy and Physiology of the Human Hand 63
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:07 AM Page 63

form a precision movement, the “proximal bones [must] be stabilized[i.e., held still] while the distal bones perform the movement” (Wells1966, 54). If the fingers are to perform a precision movement, then theproximal bone involved in that movement needs to be immobilized.Where the action of fingers is concerned, the proximal bone is themetacarpal. Because the index and middle metacarpals are anatomicallyimmobilized at the carpometacarpal joint, the index and middle fingersare capable of performing precision movements.14 In contrast, becausethe ring and pinky metacarpals are not anatomically immobilized at thecarpometacarpal joint, the ulnar fingers do not meet the condition forperforming precision movements (proximal bones stabilized while dis-tal bone performs the movement). Thus, the ring and pinky fingers arenot capable of performing precision movements.
MUSCLES
For our purposes, a muscle is more accurately characterized as amuscle-tendon group such as the one pictured in figure 14. The musclepart of a muscle-tendon group is made up of contractile tissue (tissuethat is able to contract). A muscle’s only ability is to contract and to re-turn to its rest position. The tendon part of a muscle-tendon group canbe conceptualized as a string coming off a muscle. Although a musclehas the ability to contract, its tendons, by themselves, have no such abil-ity. Tendons, in other words, either are pulled or do nothing, dependingon what is happening at the muscle origin.
Muscle-tendon groups have two ends—the origin and the insertion.The origin is where the action of the muscle originates. Typically, atthe origin, the tendons come together in one mass of contractile tissue(called a muscle head). However, it is possible for the origin of a muscleto have more than one head; in this case, each head controls different
64 Chapter Two
14. In general, the radial fingers provide the precision and stability of the hand,and the ulnar fingers provide the power and stability of the hand (Galley and Forster1987).
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:07 AM Page 64
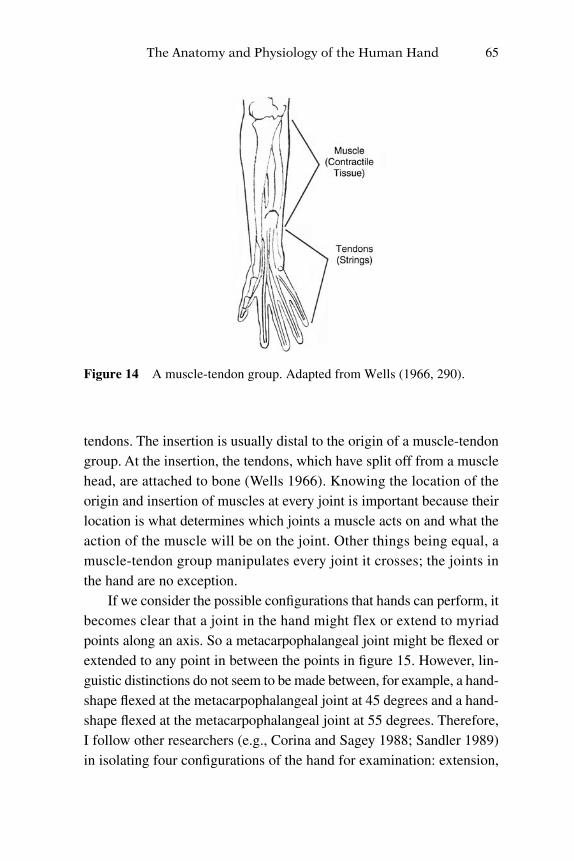
tendons. The insertion is usually distal to the origin of a muscle-tendongroup. At the insertion, the tendons, which have split off from a musclehead, are attached to bone (Wells 1966). Knowing the location of theorigin and insertion of muscles at every joint is important because theirlocation is what determines which joints a muscle acts on and what theaction of the muscle will be on the joint. Other things being equal, amuscle-tendon group manipulates every joint it crosses; the joints inthe hand are no exception.
If we consider the possible configurations that hands can perform, itbecomes clear that a joint in the hand might flex or extend to myriadpoints along an axis. So a metacarpophalangeal joint might be flexed orextended to any point in between the points in figure 15. However, lin-guistic distinctions do not seem to be made between, for example, a hand-shape flexed at the metacarpophalangeal joint at 45 degrees and a hand-shape flexed at the metacarpophalangeal joint at 55 degrees. Therefore,I follow other researchers (e.g., Corina and Sagey 1988; Sandler 1989)in isolating four configurations of the hand for examination: extension,
The Anatomy and Physiology of the Human Hand 65
Figure 14 A muscle-tendon group. Adapted from Wells (1966, 290).
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:07 AM Page 65

flexion (including curving, bending, opposition, and full flexion), ad-duction, and abduction.15 Each discussion begins with an explicationof the anatomy and then continues with an examination of the physio-logical implications of that anatomy.
Extension
When the fingers are extended, they are not flexed at any joint (see fig-ure 16). The musculature responsible for this action involves the exten-sor muscles with assistance from the juncturae tendinum, the intrinsicmuscles, and the abductors. We will examine the structural and func-tional properties of the anatomy that are responsible for extension ofthe fingers.
Extension of the thumb.
The thumb is well supplied with the following muscles that help itachieve full extension: the extensor pollicis brevis, the abductor polli-
66 Chapter Two
15. In principle, the discussion could involve five configurations or three con-figurations. Perhaps perceptual considerations account for why four configura-tions have traditionally been isolated.
Figure 15 Continuum of flexion and extension of a metacarpophalangealjoint. Drawings by Sarah Mahan.
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 66
cis longus, and the extensor pollicis longus. The origins of all three mus-cles are in the forearm. Because of the location of its insertion at theinterphalangeal joint of the thumb, the extensor pollicis brevis extendsthe thumb at the metacarpophalangeal joint. The interphalangeal joint isbrought into full extension by the combined actions of two other mus-cles, the abductor pollicis longus and the extensor pollicis longus,whose insertions lie at more distal locations in the thumb.
Extension of the fingers.
The index and pinky each have an independent extensor (Brand 1985)whose function is to extend only that finger primarily at the metacar-pophalangeal joint. These extensors are the extensor indicis proprius(for the index finger) and extensor digiti minimi (for the pinky). The ori-gins of the extensor indicis proprius and the extensor digiti minimi lie inthe forearm. The insertion of each is just distal to the metacarpopha-langeal joint.
Extension of all four fingers by the “common extensor,”extensor digitorum communis.
The origin of the extensor digitorum communis, pictured in figure 17,lies in the forearm. It has four tendons that have two insertions each. The
The Anatomy and Physiology of the Human Hand 67
Figure 16 Extension.
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 67

proximal insertions are at the wrist, and these will be discussed later inthis chapter in the section about abduction and adduction of the fingers.The distal insertions, relevant here, are between the medial and distalphalanges of each of the four fingers.
This arrangement is slightly more complicated than it first appears.When the extensor tendons cross the metacarpophalangeal joint, theyare located on the dorsal side of each finger. But just distal to the meta-carpophalangeal joint, they start to cross around the finger to the palmarside. They cross the proximal interphalangeal joint midway between thedorsal and palmar sides of the fingers. Then, at the distal interphalangealjoint, the tendons of the common extensor are squarely on the palmside of the hand. This structure is schematically illustrated in figure 18.
The physiological result of the placement of the tendons of the ex-tensor digitorum communis is that, when the extensor contracts, themetacarpophalangeal joint extends, the distal interphalangeal joint ex-tends slightly, and the proximal interphalangeal joint remains flexed.This shape resembles the sign language handshape configuration known
68 Chapter Two
Figure 17 The common extensor (extensor digitorum communis) and itstendons. Adapted from Wells and Luttgens (1976).
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 68

as curved.16 At this point, the lumbricals and interossei (known collec-tively as the intrinsic muscles because their origins and insertions arein the hand itself) come into play.
Extension by the intrinsic muscles.
The seven interosseous muscles, that is, the three palmar interossei andthe four dorsal interossei, are located on both the palmar and dorsalsides of the hand. The palmar and dorsal interossei have their origins be-tween the metacarpal bones and their insertions at the distal interpha-langeal joint. The four lumbricals are located on the radial (thumb) sideof each of the four fingers. Similar to the interossei, their origins are on
The Anatomy and Physiology of the Human Hand 69
Figure 18 The common extensor tendons. Adopted from Schider (1957, plate 4,figure 3).
16. The difference between the actual curved configuration and the looselycurved configuration referred to here is that the actual curved configuration requiresthat the flexion at proximal interphalangeal and distal interphalangeal joints begreater. To see what contraction of the extensor digitorum communis accomplishes,first, hold the left hand in a position of rest (the fingers of the left hand should beloosely flexed). Next, place the right index finger on the dorsal side of the left handat the metacarpophalangeal joint of the left index finger. Next, firmly move the rightindex finger toward the second (index) carpometacarpal joint, pulling the skinalong. The left index finger will extend slightly at the metacarpophalangeal jointand will remain loosely flexed at the two more distal joints. In this demonstration,the skin on the dorsal side of the hand has been forced to function much as theextensor digitorum communis does.
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 69
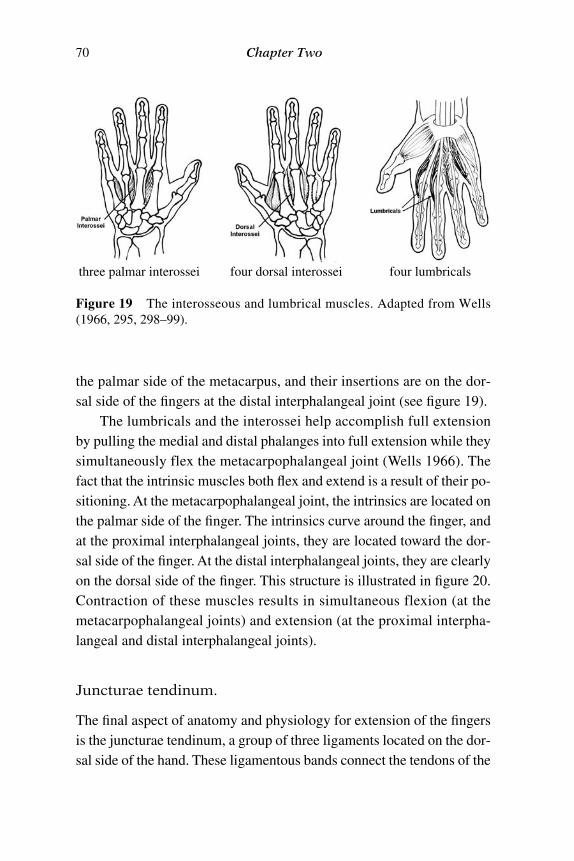
the palmar side of the metacarpus, and their insertions are on the dor-sal side of the fingers at the distal interphalangeal joint (see figure 19).
The lumbricals and the interossei help accomplish full extensionby pulling the medial and distal phalanges into full extension while theysimultaneously flex the metacarpophalangeal joint (Wells 1966). Thefact that the intrinsic muscles both flex and extend is a result of their po-sitioning. At the metacarpophalangeal joint, the intrinsics are located onthe palmar side of the finger. The intrinsics curve around the finger, andat the proximal interphalangeal joints, they are located toward the dor-sal side of the finger. At the distal interphalangeal joints, they are clearlyon the dorsal side of the finger. This structure is illustrated in figure 20.Contraction of these muscles results in simultaneous flexion (at themetacarpophalangeal joints) and extension (at the proximal interpha-langeal and distal interphalangeal joints).
Juncturae tendinum.
The final aspect of anatomy and physiology for extension of the fingersis the juncturae tendinum, a group of three ligaments located on the dor-sal side of the hand. These ligamentous bands connect the tendons of the
70 Chapter Two
three palmar interossei four dorsal interossei four lumbricals
Figure 19 The interosseous and lumbrical muscles. Adapted from Wells(1966, 295, 298–99).
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 70

extensor digitorum communis. The juncturae tendinum are pictured infigure 21. The juncturae tendinum labeled (a) connects the extensor ten-don of the pinky to that of the ring finger. The juncturae tendinum la-beled (b) connects the extensor tendon of the ring finger to that of themiddle finger. The juncturae tendinum labeled (c) connects the extensortendon of the middle finger to that of the index finger.
The physiological relevance of the juncturae tendinum anatomy isnot completely clear. However, it is expected that, as the fingers ex-tend, the juncturae tendinum will pull on each other, which will causethe fingers to be dependent on one another to varying degrees. AlthoughI leave the exact mechanics to be worked out by specialists in this field,I speculate here on the hypothesized physiological effects of theanatomical facts.
The Anatomy and Physiology of the Human Hand 71
Figure 20 The intrinsic muscles. Adapted from Schider (1957, plate 4, figure 3).
Figure 21 The juncturae tendinum. Adapted from Tubiana (1981, 241).
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 71

The extensor tendons of both the index and pinky fingers are teth-ered by only one juncturae tendinum. This structure contrasts the situa-tion for both the middle and ring fingers, which are tethered on eitherside by two juncturae tendinum: the ring finger by (a) and (b) and themiddle finger by (b) and (c) (see figure 21). I make two predictionsbased on this structure: First, fingers that are tethered by one juncturaetendinum are slightly freer than fingers tethered by two. Thus, the in-dex and pinky fingers are each a bit freer than the middle and ring fin-gers. Second, in extension, when the juncturae tendinum come into play,pairs of adjacent fingers have some effect on each other.
Because of their musculature, some fingers (the thumb, index, andpinky) can fully extend, and others (the middle and ring) cannot. Clearly,however, the abilities of both the middle and ring fingers change whenthey act with other fingers. This discussion centers on the conditions un-der which the middle and ring fingers can fully extend in concert withother fingers. I suggest, first, that when two fingers act together, any fin-ger can extend fully if (a) it has an independent extensor or (b) it is con-nected by a juncturae tendinum to a finger with an independent extensor.Second, when three or four fingers act together, any finger can fully ex-tend if each extended finger is directly connected by a juncturae tend-inum to another extended finger and if one of the group has an inde-pendent extensor. The finger combinations that can extend fully andthose that cannot are listed in table 1.
Flexion
Moving from the complicated interactions between muscles that allowextension of the hand, we now examine flexion, the movement that ul-timately brings the open hand to a fist. The hand accomplishes flexionwith four flexors plus the intrinsic muscles. Because we discussed theintrinsic muscles in the section on extension, our discussion here be-gins with the flexors. In full flexion, as in full extension, all of the jointsare pulled the same way. However, unlike full extension, full flexionrequires only the flexor muscles: no assistance is needed from any other
72 Chapter Two
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 72
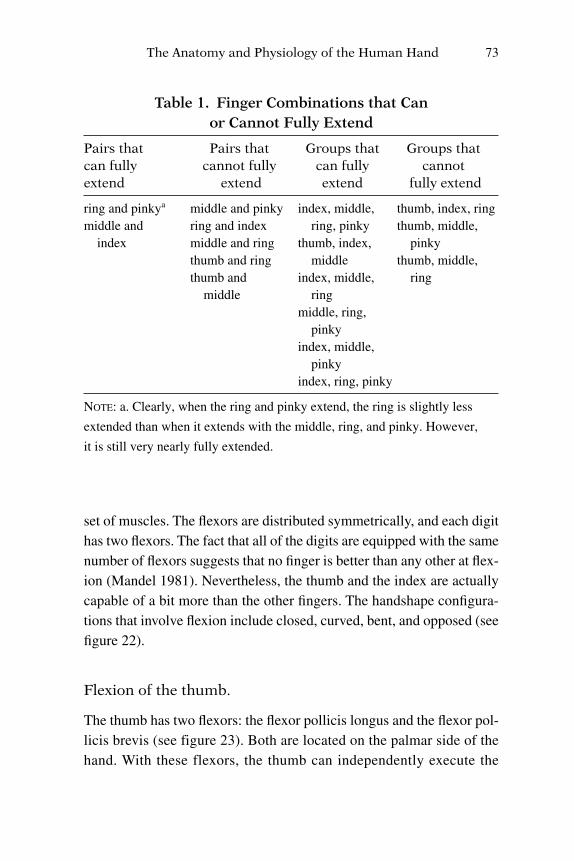
set of muscles. The flexors are distributed symmetrically, and each digithas two flexors. The fact that all of the digits are equipped with the samenumber of flexors suggests that no finger is better than any other at flex-ion (Mandel 1981). Nevertheless, the thumb and the index are actuallycapable of a bit more than the other fingers. The handshape configura-tions that involve flexion include closed, curved, bent, and opposed (seefigure 22).
Flexion of the thumb.
The thumb has two flexors: the flexor pollicis longus and the flexor pol-licis brevis (see figure 23). Both are located on the palmar side of thehand. With these flexors, the thumb can independently execute the
The Anatomy and Physiology of the Human Hand 73
Table 1. Finger Combinations that Can or Cannot Fully Extend
Pairs that Pairs that Groups that Groups that can fully cannot fully can fully cannotextend extend extend fully extend
ring and pinkya middle and pinky index, middle, thumb, index, ringmiddle and ring and index ring, pinky thumb, middle,
index middle and ring thumb, index, pinkythumb and ring middle thumb, middle, thumb and index, middle, ring
middle ringmiddle, ring,
pinkyindex, middle,
pinkyindex, ring, pinky
NOTE: a. Clearly, when the ring and pinky extend, the ring is slightly less
extended than when it extends with the middle, ring, and pinky. However,
it is still very nearly fully extended.
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 73
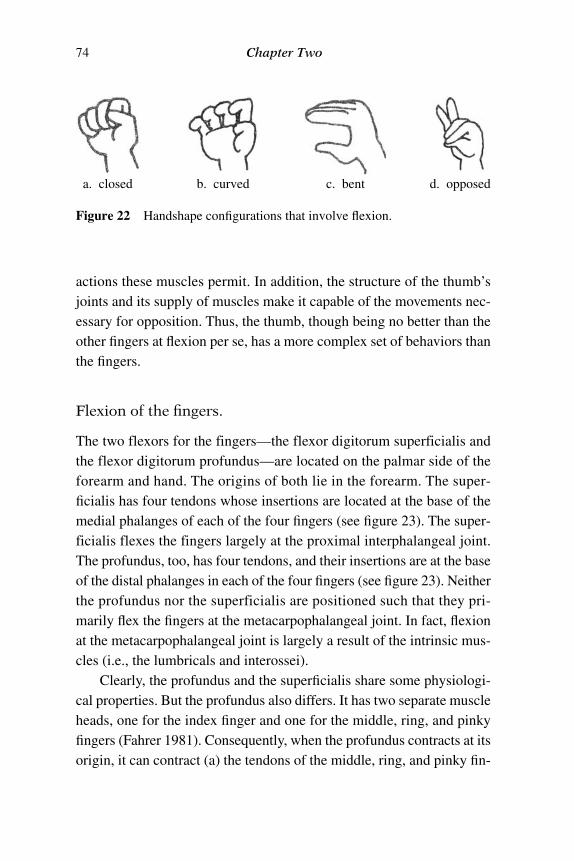
actions these muscles permit. In addition, the structure of the thumb’sjoints and its supply of muscles make it capable of the movements nec-essary for opposition. Thus, the thumb, though being no better than theother fingers at flexion per se, has a more complex set of behaviors thanthe fingers.
Flexion of the fingers.
The two flexors for the fingers—the flexor digitorum superficialis andthe flexor digitorum profundus—are located on the palmar side of theforearm and hand. The origins of both lie in the forearm. The super-ficialis has four tendons whose insertions are located at the base of themedial phalanges of each of the four fingers (see figure 23). The super-ficialis flexes the fingers largely at the proximal interphalangeal joint.The profundus, too, has four tendons, and their insertions are at the baseof the distal phalanges in each of the four fingers (see figure 23). Neitherthe profundus nor the superficialis are positioned such that they pri-marily flex the fingers at the metacarpophalangeal joint. In fact, flexionat the metacarpophalangeal joint is largely a result of the intrinsic mus-cles (i.e., the lumbricals and interossei).
Clearly, the profundus and the superficialis share some physiologi-cal properties. But the profundus also differs. It has two separate muscleheads, one for the index finger and one for the middle, ring, and pinkyfingers (Fahrer 1981). Consequently, when the profundus contracts at itsorigin, it can contract (a) the tendons of the middle, ring, and pinky fin-
74 Chapter Two
Figure 22 Handshape configurations that involve flexion.
a. closed b. curved c. bent d. opposed
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 74
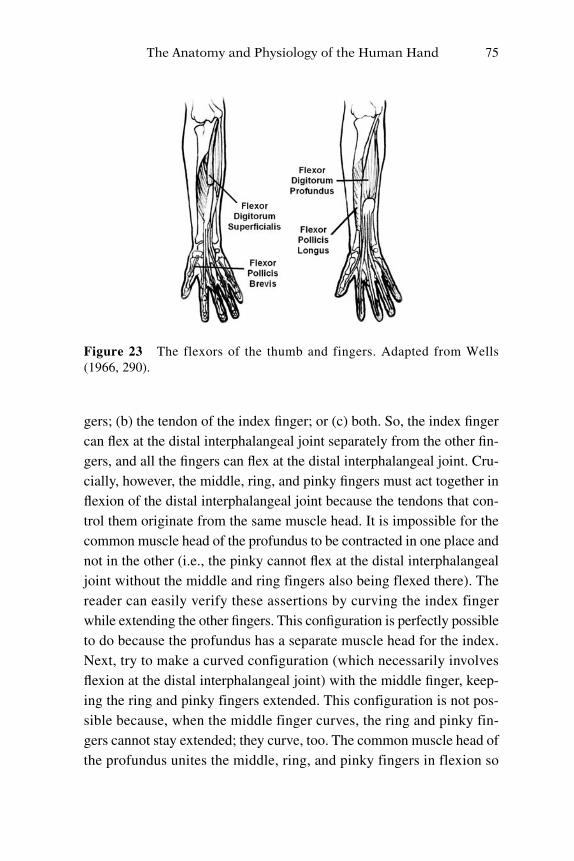
gers; (b) the tendon of the index finger; or (c) both. So, the index fingercan flex at the distal interphalangeal joint separately from the other fin-gers, and all the fingers can flex at the distal interphalangeal joint. Cru-cially, however, the middle, ring, and pinky fingers must act together inflexion of the distal interphalangeal joint because the tendons that con-trol them originate from the same muscle head. It is impossible for thecommon muscle head of the profundus to be contracted in one place andnot in the other (i.e., the pinky cannot flex at the distal interphalangealjoint without the middle and ring fingers also being flexed there). Thereader can easily verify these assertions by curving the index fingerwhile extending the other fingers. This configuration is perfectly possibleto do because the profundus has a separate muscle head for the index.Next, try to make a curved configuration (which necessarily involvesflexion at the distal interphalangeal joint) with the middle finger, keep-ing the ring and pinky fingers extended. This configuration is not pos-sible because, when the middle finger curves, the ring and pinky fin-gers cannot stay extended; they curve, too. The common muscle head ofthe profundus unites the middle, ring, and pinky fingers in flexion so
The Anatomy and Physiology of the Human Hand 75
Figure 23 The flexors of the thumb and fingers. Adapted from Wells(1966, 290).
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 75
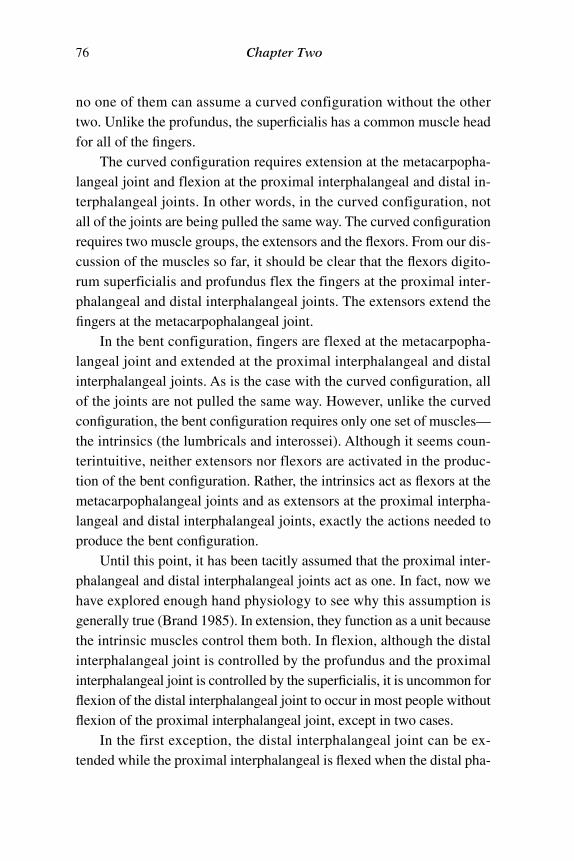
no one of them can assume a curved configuration without the othertwo. Unlike the profundus, the superficialis has a common muscle headfor all of the fingers.
The curved configuration requires extension at the metacarpopha-langeal joint and flexion at the proximal interphalangeal and distal in-terphalangeal joints. In other words, in the curved configuration, notall of the joints are being pulled the same way. The curved configurationrequires two muscle groups, the extensors and the flexors. From our dis-cussion of the muscles so far, it should be clear that the flexors digito-rum superficialis and profundus flex the fingers at the proximal inter-phalangeal and distal interphalangeal joints. The extensors extend thefingers at the metacarpophalangeal joint.
In the bent configuration, fingers are flexed at the metacarpopha-langeal joint and extended at the proximal interphalangeal and distalinterphalangeal joints. As is the case with the curved configuration, allof the joints are not pulled the same way. However, unlike the curvedconfiguration, the bent configuration requires only one set of muscles—the intrinsics (the lumbricals and interossei). Although it seems coun-terintuitive, neither extensors nor flexors are activated in the produc-tion of the bent configuration. Rather, the intrinsics act as flexors at themetacarpophalangeal joints and as extensors at the proximal interpha-langeal and distal interphalangeal joints, exactly the actions needed toproduce the bent configuration.
Until this point, it has been tacitly assumed that the proximal inter-phalangeal and distal interphalangeal joints act as one. In fact, now wehave explored enough hand physiology to see why this assumption isgenerally true (Brand 1985). In extension, they function as a unit becausethe intrinsic muscles control them both. In flexion, although the distalinterphalangeal joint is controlled by the profundus and the proximalinterphalangeal joint is controlled by the superficialis, it is uncommon forflexion of the distal interphalangeal joint to occur in most people withoutflexion of the proximal interphalangeal joint, except in two cases.
In the first exception, the distal interphalangeal joint can be ex-tended while the proximal interphalangeal is flexed when the distal pha-
76 Chapter Two
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 76
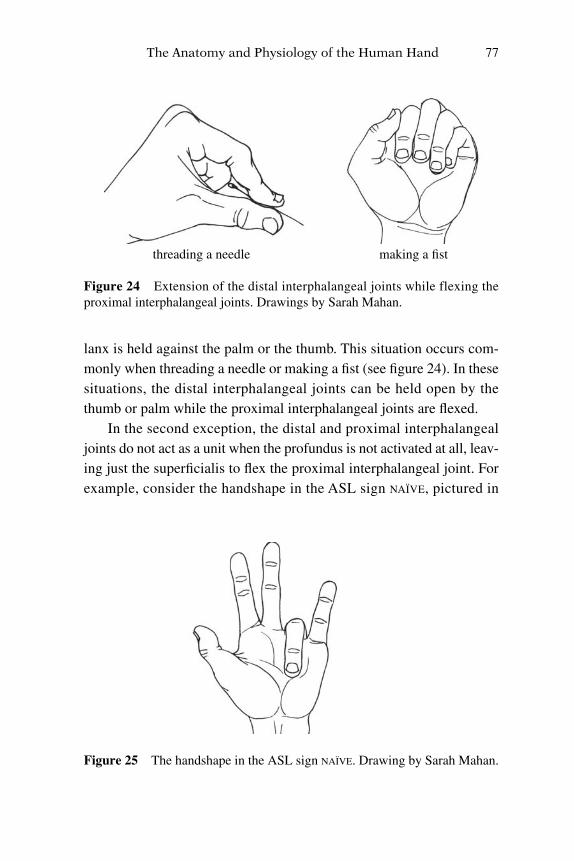
lanx is held against the palm or the thumb. This situation occurs com-monly when threading a needle or making a fist (see figure 24). In thesesituations, the distal interphalangeal joints can be held open by thethumb or palm while the proximal interphalangeal joints are flexed.
In the second exception, the distal and proximal interphalangealjoints do not act as a unit when the profundus is not activated at all, leav-ing just the superficialis to flex the proximal interphalangeal joint. Forexample, consider the handshape in the ASL sign NAÏVE, pictured in
The Anatomy and Physiology of the Human Hand 77
Figure 24 Extension of the distal interphalangeal joints while flexing theproximal interphalangeal joints. Drawings by Sarah Mahan.
threading a needle making a fist
Figure 25 The handshape in the ASL sign NAÏVE. Drawing by Sarah Mahan.
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 77

figure 25. The proximal interphalangeal joint of the ring finger is clearlyflexed. However, the distal interphalangeal joint is neither flexed nor ex-tended. These exceptions notwithstanding, in both flexion and exten-sion, the proximal interphalangeal joint and the distal interphalangealjoint operate for the most part as one unit.
Opposition.
I consider a finger to be opposed to the thumb when either the pad istouching the pad of the thumb or the tip is touching the thumb tip. Ex-cluded from opposition are configurations in which the fingers are re-strained behind the thumb (i.e., when the pad of the thumb is touchingthe fingernails of the “restrained” fingers) (Mandel 1981; Corina andSagey 1988). I consider the fingers in those excluded handshapes to beclosed. An opposed handshape is pictured in figure 22d.
Opposition is similar to bending in two ways. First, both requireflexion at the metacarpophalangeal joint. Second, both will tolerate asmall degree of proximal interphalangeal and distal interphalangealjoint flexion. Opposition and bending differ in one way: contact of thefingerpad or tip with the thumb is necessary in opposed handshapeswhereas no contact with the thumb occurs in bent handshapes.
The thumb is the most specialized digit in that it is capable of notonly all the same movement of the fingers but also other movementssuch as opposition (Napier 1980). Opposition is a combination of ab-duction (spreading) and hyperflexion (Wells 1966). In opposition, boththe thumb and each of the opposed fingers make a contribution.
Let us take a closer look at the contributions of each digit to oppo-sition. The thumb’s contribution is its mobility at the carpometacarpaljoint and the action of the muscle, the opponens pollicis, which “makesit possible when flexing phalanges for the thumb to touch the tip of anyof the four fingers” (Wells 1966, 297). Clearly, all four fingers can flexat the metacarpophalangeal joint to bring them into position to opposethe thumb. But the positioning of the fingers relative to the thumb mustmake a contribution to opposition. For example, the index opposes the
78 Chapter Two
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 78

thumb automatically when the index is flexed and the thumb is abducted(Wells 1966). The middle finger, like the index finger, is also able to op-pose the thumb with little effort, presumably because of its close posi-tion to the thumb (Sandy Sasarita, pers. comm.).17 I assume, therefore,that the opponens pollicis is not used when either the index finger orthe middle finger opposes the thumb.
In contrast, for the thumb to oppose the ring and pinky fingers, boththe thumb and the ring or pinky must make contributions. The pinky’sopponens digiti minimi, whose function it is both to “flex and abduct thefifth metacarpal bone” (Wells 1966, 295), is activated, thereby posi-tioning the pinky so it can oppose the thumb. The ring finger lacks spe-cial musculature; however, its position on the hand (i.e., nearer to thethumb than the pinky), contributes to its ability to oppose the thumb.
Abduction and adduction.
The final configurations relevant to sign language handshapes are ab-duction and adduction—the spreading apart and coming together ofextended fingers. When fingers are “spread,” they are abducted (as infigure 26a), or moved away from the middle finger (Napier 1980). Whenthere are no spaces between the fingers, they are adducted (as in figure26b). Two sets of anatomical facts cause a natural tendency for fingersto abduct when extending. These are the structure and function of thecollateral ligaments and the placement of the proximal insertions of theextensor digitorum communis, both discussed further here.
The opportunity for fingers to spread (abduct) when extending iscreated by the location and function of the collateral ligaments and theshape of the metacarpal head. Each finger has two collateral ligaments.They are located at the knuckle, the place where the metacarpal headsmeet the proximal phalanges. One collateral ligament is anchored on the
The Anatomy and Physiology of the Human Hand 79
17. Mandel (1981) notes that the index is the “most opposable” finger (99).Mandel (1979) describes the phenomenon known as tenodesis, discussed in chap-ter 1, which bears on this point.
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 79

radial side of the knuckle, and the other is anchored on the ulnar side.These ligaments perform two functions: first, they connect the relevantmetacarpal head to the proximal phalanx of the relevant finger, and sec-ond, they allow abduction of the fingers. Abduction is possible whenfingers are extended at the metacarpophalangeal joint, but not when theyare flexed. The reader can easily verify this claim by flexing the meta-carpophalangeal joint and trying to spread the fingers. It is very difficultto get any spreading at all. Next, extend the fingers at the metacarpopha-langeal joints and spread them. In this configuration, spreading is notonly possible but natural.
When the metacarpophalangeal joint is flexed, the collateral liga-ments are required to stretch around the large part of the metacarpalhead. In so doing, the ligaments become taut and cannot then allow ab-duction. The situation is different when there is extension at the meta-carpophalangeal joint. In this case, the ligaments do not have to reacharound the large part of the metacarpal head, and are, therefore, loose.When the ligaments are loose, abduction of the fingers is possible. Themetacarpophalangeal joint in extension (a) and flexion (b) is picturedin figure 27. Notice the taut collateral ligaments in the illustration offlexion.
The positioning of the attachments of the tendons of the extensordigitorum communis at the metacarpophalangeal and carpometacarpaljoints causes the tendons to function as abductors because of their “line
80 Chapter Two
Figure 26 Handshape configurations do not involve flexion.
a. abducted b. adducted
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 80

of pull” (MacConaill and Basmajian 1969, 214). Recall that the ten-dons of the extensor digitorum communis have two insertions: one atthe carpometacarpal joint, relevant here, and one between the medialand distal phalanges of each finger. The fact that the extensor digito-rum communis has these two insertions creates a line of pull. At themetacarpophalangeal joint, the tendons are attached by sagittal bands,which are situated on top of each knuckle and hold the tendons in place(i.e., not, for example, in the space between each knuckle, which wouldcreate a different line of pull). Proximal to this attachment, the exten-sor tendons are also attached in the middle of the wrist. When the ex-tensor digitorum communis contracts, if each of its tendons is to endup in a straight line, the fingers are forced to abduct slightly. In figure 28
The Anatomy and Physiology of the Human Hand 81
Figure 27 Inability to adduct in flexion. Adapted from Tubiana, Thomine,and Mackin (1996, 75).
extension
flexion
a
b
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 81
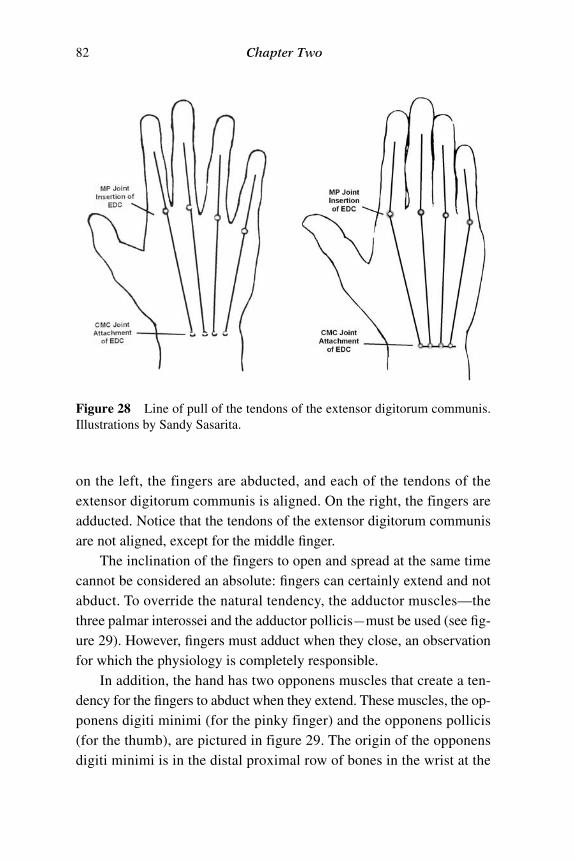
on the left, the fingers are abducted, and each of the tendons of theextensor digitorum communis is aligned. On the right, the fingers areadducted. Notice that the tendons of the extensor digitorum communisare not aligned, except for the middle finger.
The inclination of the fingers to open and spread at the same timecannot be considered an absolute: fingers can certainly extend and notabduct. To override the natural tendency, the adductor muscles—thethree palmar interossei and the adductor pollicis—must be used (see fig-ure 29). However, fingers must adduct when they close, an observationfor which the physiology is completely responsible.
In addition, the hand has two opponens muscles that create a ten-dency for the fingers to abduct when they extend. These muscles, the op-ponens digiti minimi (for the pinky finger) and the opponens pollicis(for the thumb), are pictured in figure 29. The origin of the opponensdigiti minimi is in the distal proximal row of bones in the wrist at the
82 Chapter Two
Figure 28 Line of pull of the tendons of the extensor digitorum communis.Illustrations by Sandy Sasarita.
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 82
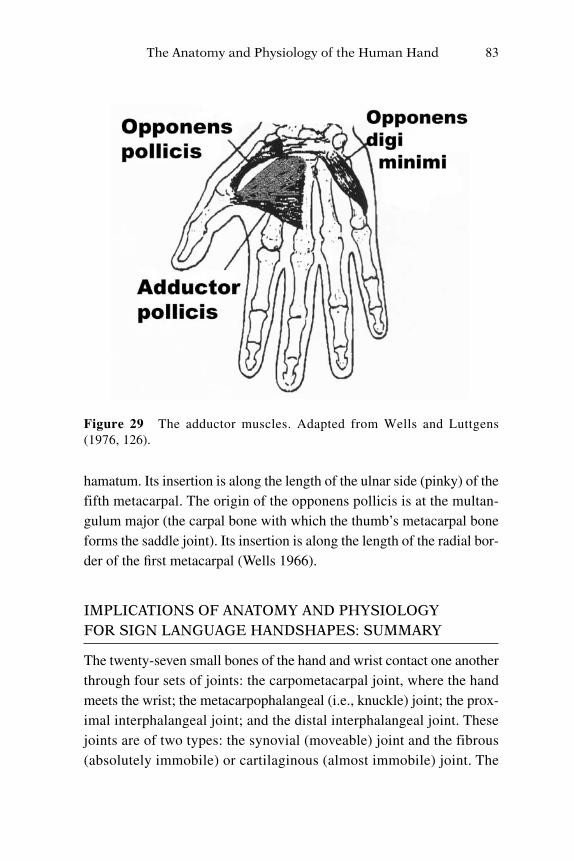
hamatum. Its insertion is along the length of the ulnar side (pinky) of thefifth metacarpal. The origin of the opponens pollicis is at the multan-gulum major (the carpal bone with which the thumb’s metacarpal boneforms the saddle joint). Its insertion is along the length of the radial bor-der of the first metacarpal (Wells 1966).
IMPLICATIONS OF ANATOMY AND PHYSIOLOGY FOR SIGN LANGUAGE HANDSHAPES: SUMMARY
The twenty-seven small bones of the hand and wrist contact one anotherthrough four sets of joints: the carpometacarpal joint, where the handmeets the wrist; the metacarpophalangeal (i.e., knuckle) joint; the prox-imal interphalangeal joint; and the distal interphalangeal joint. Thesejoints are of two types: the synovial (moveable) joint and the fibrous(absolutely immobile) or cartilaginous (almost immobile) joint. The
The Anatomy and Physiology of the Human Hand 83
Figure 29 The adductor muscles. Adapted from Wells and Luttgens(1976, 126).
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 83

metacarpophalangeal, proximal interphalangeal, and distal interpha-langeal joints of the fingers are all mobile joints. In addition, all of thejoints of the thumb are mobile. But the carpometacarpal joints of the fin-gers are either fixed or only slightly mobile. The metacarpals of the in-dex and middle fingers are immobilized (fixed) at the carpometacarpaljoint. The metacarpals of the ring and pinky fingers are slightly move-able. Given this structure, the index and middle fingers are much morecapable than are the ring and pinky of making precision movementssuch as those needed for handshapes.
The common extensors cause the fingers to extend at the meta-acarpophalangeal joint when either the four fingers or all five digits acttogether. The independent extensors for the thumb, index, and pinkydo this work when one of those fingers is extended alone. To accomplishfull extension, two separate sets of muscles are required—the extensors,which extend the finger at the metacarpophalangeal joint, and the in-trinsics, which finish the job by extending the proximal interphalangealand distal interphalangeal joints.
There is an asymmetry with respect to extensors. The thumb, in-dex, and pinky each have two extensors: their respective tendons of the
84 Chapter Two
Table 2. Summary of Finger Independence and Movement
Physiological evidence for the ranking
Favorable FavorableNumber of Number of carpometacarpal juncturae
Finger extensors flexors joint? tendinum?
Thumb 2 (2 independent) 2 (2 independent) yes n.a.Index 2 (1 independent) 2 (1 independent) yes yesMiddle 1 2 (1 tied to ring
and pinky) yes noRing 1 2 (1 tied to middle
and pinky) no noPinky 2 (1 independent) 2 (1 tied to middle
and ring) no yes
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 84

common extensor and an independent extensor. The result is that thethumb, index, and pinky can extend even if they act alone. In contrast,the middle and ring fingers each have only the tendon of the commonextensor (see, e.g., Mandel 1981; Boyes-Braem 1990; Wells 1966).Without the analogous extra set of muscles, the middle and ring fingersare much less able to extend, particularly if they must do so alone withthe rest of the fingers closed. It is clear that the common extensor is notvery effective when only one of its tendons is working because, in thosesituations, full extension of the middle and ring fingers is impossible.The best the common extensor can do is to get the middle or ring fin-ger into a bent configuration.18
Each of the digits has two flexors whose function it is to flex themat various joints. In addition, the intrinsic muscles have the task of flex-ing the fingers at the metacarpophalangeal joint while extending them atthe proximal interphalangeal and distal interphalangeal joints. All ofthese anatomical features make it possible for the individual fingersand the hand to produce the handshapes of sign languages. Table 2 pre-sents a summary of the fingers with respect to independence and ability
The Anatomy and Physiology of the Human Hand 85
18. Even in combination with other fingers, the middle and especially the ringfingers are poor at full extension. The muscular deficit of the ring finger is exacer-bated by its status as an ulnar finger and by the juncturae tendinum that tie it toother fingers.
Table 3. Summary of Hand Configurations
Are the joints pulledConfiguration the same way? Muscles responsible
Extended yes extensors, intrinsicsClosed yes flexorsCurved no extensors, flexorsBent or opposed no intrinsics, opponensSpread yes abductorsUnspread yes adductors
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 85

to perform certain actions. Table 3 summarizes how the hand as a wholeaccomplishes various configurations in different ways.
In chapter 3 I use the physiological facts and hypotheses presentedhere to construct a theory of ease of articulation. Specifically, in chap-ter 3, I assign a relative “ease of articulation” score to each logicallypossible handshape.
86 Chapter Two
ch02_8033_JeanAnn_Gallaudet 9/5/06 10:08 AM Page 86
Chapter Three
A Model of Ease of Handshape Articulation
In this chapter, I construct an explicit model of handshape ease of ar-ticulation based on the physiological facts explained in chapter 2. As Iwill show, the model allows us to divide logically possible handshapesinto three groups: easy to articulate, difficult to articulate, and physicallyimpossible to articulate. To construct this model, I first motivated thephysiologically based criteria that I think affect ease of articulation. Ithen applied physiologically based criteria to all the fingers, to somesubset of fingers, or to a single finger whereupon each handshape re-ceived an “ease score,” that is, a number that reflects its relative ease ofarticulation.
A handshape can involve all of the fingers in one group, all doingthe same thing, or it can involve fingers in exactly two groups, for ex-ample, one that includes the extended index and thumb and one thatincludes the closed middle, ring, and pinky fingers.19 Logically, a
87
19. According to Mandel’s finger position constraint (FPC) (1981), licit hand-shapes can involve fingers all in one group or fingers in two groups, but no morethan two groups. Actually, the set of generalizations included in the concept of FPCis somewhat more complicated. The concept of FPC asserts that one of the twogroups (Mandel’s “selected” fingers) can be in any position except closed, but theymust all be in the same position. They can change shape in a sign that involveshandshape change, and they can make contact with the other hand or with someother part of the body. The second group of fingers (Mandel’s “unselected” fingers)can be either all fully extended or all fully flexed (Mandel 1981; Sandler 1989;Corina and Sagey 1988). The FPC has never been seriously challenged.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 87

handshape could be made with three groups of fingers, for example, onein which the thumb is extended, the index finger is bent, and the middle,ring, and pinky fingers are curved (or it could be made with five groupsfor that matter, with each of the five fingers doing something differ-ent), but handshapes such as these are not observed in natural sign lan-guages. The generalization of no more than two groups (Mandel 1981)is quite helpful in characterizing attested handshapes and in ruling outmany logical possibilities. Therefore, I maintain a distinction betweenthe two groups of fingers, and I refer to these two groups in the most de-scriptive way possible. For example, in this work, the handshape in fig-ure 30 will be referred to as a two-group handshape in which two fin-gers are extended with the rest of the fingers closed; other possibilitiesfor two-group handshapes could include bent and closed or curved andclosed.
As we have discussed, the basic hand configurations used in signlanguages are extended (which some refer to as open), bent, curved, andclosed. In addition, hand configurations can involve the fingers beingopposed, abducted, or adducted. The anatomical and physiological fea-tures of the fingers, hand, and wrist, which are discussed in chapter 2,provide good reasons to consider the four main configurations unequal
88 Chapter Three
Figure 30 An example of a two-group handshape.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 88

in terms of their relative levels of difficulty. A search of the physio-logical literature did not reveal any ranking of configurations. Therefore,this work establishes a ranking, which is crucial to the process of de-termining the relative ease of handshape articulation. To that end, I haveestablished five criteria based on hand physiology: muscle opposition inconfigurations of handshapes, support for extension, support for flexion,tendency to oppose the thumb, and tendency to spread. These criteria re-fer mostly to muscle function; the joint structures in the hand contributeless prominently.
CRITERION ONE: MUSCLE OPPOSITION INCONFIGURATIONS (MOC) OF HANDSHAPES
I start from the assumption that the more opposition there is between themuscle groups necessary to produce a particular configuration, the moredifficult the configuration is to articulate. Similar assumptions have beenmade in the phonetic and phonological literature of spoken languages.For example, Lindblom and Sundberg (1971) conclude that “antagonism”is a characteristic of the supershapes of the tongue that subjects producein the bite-block studies (discussed in chapter 1); various muscles inthe tongue oppose one another to create the supershapes. Lindblom(1983) hypothesized that consonant-vowel coarticulation arises from a“synergy constraint” that seeks to keep the actions of the tongue tip andtongue body coordinated. Archangeli and Pulleyblank (1994) use “syn-ergy” and “antagonism” in grounded phonology, a theory that seeks to“ground” phonological rules in phonetics. In grounded phonology, en-tities such as the features [� advanced tongue root], [� advanced tongueroot] and [� high] are conceived both as instructions to the tongue andas phonological features. The feature [� advanced tongue root] instructsthe tongue root to advance, the feature [� advanced tongue root] in-structs the tongue root to retract, and the feature [� high] instructs thetongue body to raise. Any two instructions to the tongue (i.e., any twofeature combinations) are said to be in either an antagonistic or a syn-
A Model of Ease of Handshape Articulation 89
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 89

ergistic relationship with respect to each other. If they are in an an-tagonistic relationship, then the tongue would receive instructions tomove in opposing directions. If they are in a synergistic relationship,then both instructions to the tongue would potentially move it in thesame direction. Thus, the combination of [� high] and [� advancedtongue root] are antagonistic because the instruction [� high] raises thetongue body, pushing it forward whereas the instruction [� advancedtongue root] retracts the tongue root. In contrast, the feature combina-tion [� advanced tongue root] and [� high] are synergistic: both movethe tongue forward and raise it.
In a similar approach, I use the notions of synergy and antagonismto analyze handshapes. My assumption is that the more opposition (an-tagonism) between the muscles that is necessary to produce a configu-ration, the more difficult the configuration is to produce. This assump-tion is formally expressed in the model through a criterion that describesthe amount of opposition that exists between the muscles necessary toproduce a configuration—muscle opposition in configurations (MOC),which is understood in this context to always be related to handshapes.
The MOC criterion focuses on the hand as a whole, not on individ-ual fingers. (Criteria to be described later will focus more on individualfingers.) To understand how configuration of the hand affects overallease of articulation of handshapes, we must consider the muscles andmuscle groups that potentially control the hand as a whole. The rele-vant muscles (some of the extensors as well as all of the flexors and in-trinsics) and their functions are listed in table 4.
The information in table 4 helps to establish the difficulty of a par-ticular configuration because the MOC criterion is concerned with howmuch opposition exists between the muscles necessary to produce it.Of the muscles listed in table 4, extensors and flexors maximally opposeeach other because they accomplish opposite tasks. The intrinsics, be-cause of their placement in the hand, act in both opposition and synergywith both flexors and extensors. Thus, I conclude that maximal opposi-tion would exist in configurations that use both the extensors and theflexors. Less opposition would exist in configurations that use (a) the ex-
90 Chapter Three
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 90
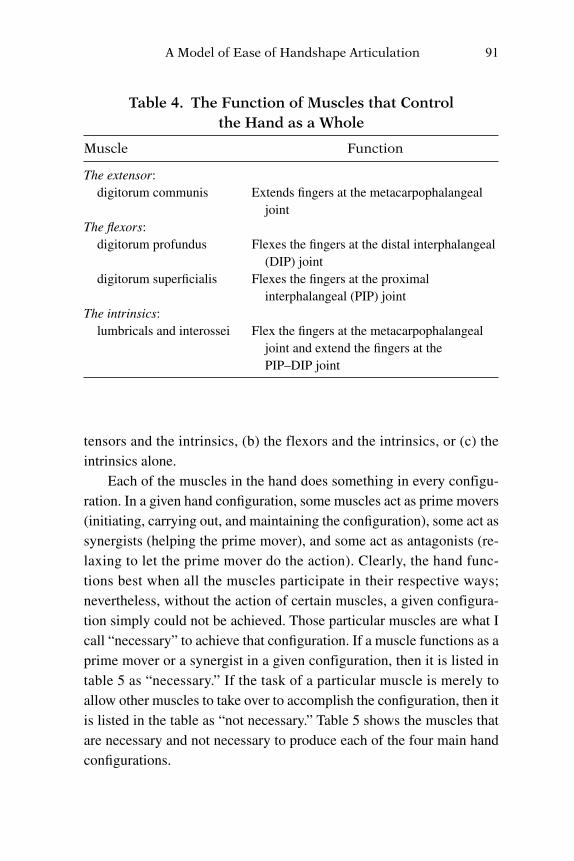
tensors and the intrinsics, (b) the flexors and the intrinsics, or (c) theintrinsics alone.
Each of the muscles in the hand does something in every configu-ration. In a given hand configuration, some muscles act as prime movers(initiating, carrying out, and maintaining the configuration), some act assynergists (helping the prime mover), and some act as antagonists (re-laxing to let the prime mover do the action). Clearly, the hand func-tions best when all the muscles participate in their respective ways;nevertheless, without the action of certain muscles, a given configura-tion simply could not be achieved. Those particular muscles are what Icall “necessary” to achieve that configuration. If a muscle functions as aprime mover or a synergist in a given configuration, then it is listed intable 5 as “necessary.” If the task of a particular muscle is merely toallow other muscles to take over to accomplish the configuration, then itis listed in the table as “not necessary.” Table 5 shows the muscles thatare necessary and not necessary to produce each of the four main handconfigurations.
A Model of Ease of Handshape Articulation 91
Table 4. The Function of Muscles that Control the Hand as a Whole
Muscle Function
The extensor:digitorum communis Extends fingers at the metacarpophalangeal
jointThe flexors:
digitorum profundus Flexes the fingers at the distal interphalangeal (DIP) joint
digitorum superficialis Flexes the fingers at the proximal interphalangeal (PIP) joint
The intrinsics:lumbricals and interossei Flex the fingers at the metacarpophalangeal
joint and extend the fingers at the PIP–DIP joint
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 91

It is obvious from table 5 that some configurations (closed, bent)have one group of necessary muscles, and some (extended, curved) havetwo. Configurations in which only one group of muscles is necessaryshow no evidence of opposition; configurations in which two musclegroups are necessary show some amount of opposition. Clearly, both theextended and curved configurations involve more muscle oppositionthan the closed and bent configurations. But comparing the extendedand curved configurations, curved is the more difficult because it in-volves both the extensors and the flexors, which maximally oppose eachother. Extended is the next most difficult configuration because it usesthe extensors and the intrinsics between which there is less opposition.Bent and closed are the easiest; both require only one group of musclesand show no evidence of any opposition. With this information, then, wecan derive the three-way ranking in table 6.
Although the bent and closed configurations are the easiest toarticulate, three independent observations enable us to discern thatclosed is easier to articulate than bent. First, infants are born with their
92 Chapter Three
Table 5. Muscles Necessary in Hand Configurations
Configuration Extensors Flexors Intrinsics
Closed not necessary necessary not necessaryBent not necessary not necessary necessaryExtended necessary not necessary necessaryCurved necessary necessary not necessary
Table 6. Three-Way Ranking of Hand Configurations
Configuration Relative ease Level of opposition Necessary muscles
Curved most difficult maximal extensors and flexorsExtended next most difficult less extensors and intrinsicsBent, Closed easiest least Bent: intrinsics
Closed: flexors
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 92

muscles flexed; only later do they develop the ability to extend them(Boyes-Braem 1990; Halverson 1937). Full flexion is involved in somereflexes evident in infants, for example, the palmar grasp reflex. Sec-ond, when the hand is in a position of rest, as in sleep, the flexors pre-dominate over the extensors because the fingers are loosely flexed at allthe joints. Third, the closed configuration is considered physicallystrong in the sense that, although extended fingers cannot be preventedfrom making a fist, fully flexed fingers can be prevented from extend-ing. This last observation illustrates that extensors are weaker than flex-ors. Grasps in which the fingers are fully flexed are used in the largestnumber of prehensile functional activities. Other partially flexed con-figurations (such as those resembling bent and curved configurations)are not used as often. I take these observations as preliminary evidencethat the closed configuration is more natural and easier than the bentconfiguration.
The MOC criterion allows us to capture a constellation of facts thatsuggest that the hand, when nothing special is going on, naturally tendstoward a configuration in which there is no muscle opposition and thefingers are slightly flexed. Therefore, the more opposition in a config-uration, the more the configuration departs from the natural state ofthe hand and, thus, the more difficult the configuration is to articulate.If this logic is on the right track, then the level of difficulty of each handconfiguration shown in table 7 would result, with the easiest configu-ration getting a score of 0 and the most difficult configuration getting ascore of 3.
A Model of Ease of Handshape Articulation 93
Table 7. Ranking of Difficulty of Hand Configurations
Configuration Relative ease Level of opposition Level of difficulty
Curved most difficult maximal 3Extended next most difficult less 2Bent easier even less 1Closed easiest least 0
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 93

CRITERION TWO: SUPPORT FOR EXTENSION (SE)
The support for extension (SE) criterion is one of two that refers to thecapabilities of individual fingers, or subgroupings of fingers, but not tothe hand as a whole. In this sense, it differs from the MOC criterion. SEexamines characteristics of individual fingers and subgroups of fingersrelevant to extension—in other words, the muscles and muscle groupsthat control individual fingers (the extensor pollicis longus, the extensorindicis proprius, the extensor digiti minimi) and the juncturae tendinum.
The SE criterion determines whether the extended fingers haveeither (a) an independent extensor or (b) “sufficient support” to extend.A handshape in which the thumb, index, or pinky is extended alone doesnot need support because each of those three digits have independentextensors. The middle and ring fingers have no independent extensors,but they do have sufficient support to extend under two circumstances:in chapter 2, I observed that the middle and ring can fully extend either(a) with an immediately adjacent independent extensor finger or (b) witha group of extended fingers in which each member is adjacent to at leastone other member of the group and one of the members has an inde-pendent extensor. The combinations of fingers that can fully extend andthose that cannot fully extend (even with support) are listed in table 8.
94 Chapter Three
Table 8. Possible Finger Combinations Based on Extension Support
Extensions not possible because Extensions possible with support fingers do not have support
index, middle, ring, pinky thumb, middle, ringthumb, index, middle thumb, index, ringindex, middle, ring thumb, middle, pinkyindex, middle, pinky thumb, middleindex, ring, pinky thumb, ringmiddle, ring, pinky index, ringindex, middle middle, ringring, pinky middle, pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 94

This criterion allows us to determine from a cluster of physiologicalfacts that not all fingers are equally capable of full extension. Certain in-dividual fingers, all five fingers as a group, and certain smaller subsetsof fingers are equipped to fully extend whereas some individual fingersand subsets of fingers are not equipped to do so.
CRITERION THREE: SUPPORT FOR FLEXION (SF)
The third criterion, support for flexion (SF), concerns whether all mem-bers of the set {middle, ring, pinky} act together in flexion and exten-sion, that is, whether the middle, ring, and pinky fingers are either all in-cluded or all excluded in the act of flexion or extension. There are tworeasons to consider the set {middle, ring, pinky} as a group in both flex-ion and extension. First, the flexor digitorum profundus, which flexesthe fingers at the distal interphalangeal joint, has one muscle head forthe middle, ring, and pinky fingers and a separate muscle head for theindex finger. The effects are that no single finger of the set {middle,ring, pinky} can be curved while the rest in the set are extended. How-ever, because the profundus has a separate muscle head for the indexfinger alone, the index finger can be curved while the other fingers areextended.
The second reason supporting the set {middle, ring, pinky} is ex-plained, in part, by the fact that, of the four fingers, the middle and ringfingers are the most dependent because each is tethered on two sidesby juncturae tendinum. But what makes the middle, ring, and pinky fin-gers a group rather than the index, middle, and ring fingers? The answerto this question is that the index has both a joint structure advantage anda musculature advantage (see pages 61–78). With these two advantages,the index finger is able to move quite independently of the other fingers;the other three fingers, however, lack one or both of these advantages.
The SF criterion is a way of capturing the fact that, particularly inflexion, the set {middle, ring, pinky} are, to a large degree, incapableof acting separately. The physiological information in chapter 2 cer-tainly confirms this fact.
A Model of Ease of Handshape Articulation 95
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 95

CRITERION FOUR: TENDENCY TO OPPOSE THE THUMB (TOT)
Because the thumb is necessarily involved in every opposed handshape,the characteristics of the thumb relevant to opposition are expected to beimportant. The tendency to oppose the thumb (TOT) criterion deter-mines whether the thumb naturally tends to oppose the relevant finger(or fingers).
Mandel (1981) observes that the thumb opposes the index and per-haps the middle finger almost automatically. However, opposition ofthe thumb to the ring and pinky fingers is apparently much more com-plex because both the thumb and the pinky finger are equipped withspecial muscles—the opponens pollicis and the opponens digiti min-imi, respectively—that enable opposition to the thumb (Mandel 1981).These muscles move the relevant finger across the palm of the hand,readying it to perform opposition. Boyes-Braem (1981) points out thatthe joint structure of the pinky carpometacarpal resembles the thumb’shighly moveable carpometacarpal joint. My research suggests that thethumb opposes the ring finger with some difficulty. These findingssupport the assertion that opposition of the thumb to the index andmiddle fingers is easier than opposition of the thumb to the ring andpinky fingers.
The physiological literature cited in chapter 2 and the observationsof linguists suggest that the thumb naturally opposes certain fingers (theindex and middle) when they are flexed at the metacarpophalangeal andDIP–PIP joints whereas opposition of the thumb to the ring and pinky ismore difficult. The TOT criterion is a way of capturing this fact.
CRITERION FIVE: THE TENDENCY TO SPREAD (TS)
The tendency to spread (TS) criterion determines whether the hand-shape relies on natural spreading of fingers. In some handshapes, fin-gers are spread (abducted); in others, they are not spread (adducted).Physiologically, fingers are incapable of being spread if they are con-
96 Chapter Three
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 96
figured in either the bent or closed configuration (Ann 1992a, 1992b).But spreading (abduction) of the fingers occurs automatically when fin-gers are extended at the metacarpophalangeal joint, as in the extendedor curved configurations. So, when fingers are extended or curved, theadductor pollicis and the three dorsal interossei must be activated forthe fingers to unspread, or adduct. Spread handshapes, then, appear tobe easier to produce than unspread handshapes because producing anunspread handshape requires extra muscles to be activated. The TScriterion reflects the natural tendency for fingers to spread when theyare extended.
HOW THE CRITERIA APPLY TO HANDSHAPES
The criteria apply in different ways to different sorts of handshapes. Inhandshapes involving only one group of fingers, by definition, all of thefingers are doing the same thing. Thus, in one-group handshapes, the needto account for properties of more complex handshapes will not arise,and as a result, not all five criteria need apply. I will explain further thesituation for one-group handshapes with respect to each criterion as Imove through the explanation of how the criteria apply.
How the criteria apply to two-group handshapes is a bit more com-plex and requires standard, clear descriptions of the handshapes. Ac-cording to our definition of a two-group handshape, one group will con-sist of fingers that are extended, bent, or curved, and one group will beeither closed or extended. The group that is either closed or open will bereferred to as “the rest of the fingers” (or rest closed, rest open). (Obvi-ously, a handshape in which one group is extended and the other is openends up being a one-group handshape and, so, is not included here.)Thus, a two-group handshape such as the first handshape in figure 31,would be described as one in which some fingers (the index and thumb)are bent and the rest of the fingers (the middle, ring, and pinky fingers)are closed.
This approach to describing the handshapes works for all hand-shapes, with one exception, and that is two-group handshapes in which
A Model of Ease of Handshape Articulation 97
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 97

only one finger is extended and the others are closed (see figure 31b).That particular type of handshape can be described in two ways, and itis necessary to decide which description should be applied: (a) thepinky is extended with the rest of the fingers closed or (b) the thumb,index, middle, and ring are closed with the rest of the fingers extended.In the remainder of this work, I treat any handshape in which there aretwo groups of fingers, one of which is extended and one of which isclosed, as if specific fingers are extended and the rest of the fingersare closed.
THE MOC CRITERION
The MOC criterion applies to a different group of fingers depending onthe type of handshape. If the handshape whose ease score we are tryingto determine is a one-group handshape, it applies to all the fingers. If thehandshape is a two-group handshape, in which some of the fingers areextended, then the MOC applies to the group of fingers that are mostflexed, that is, not the group of fingers that are extended. (I explain thisapplication further shortly.) If we are trying to determine the ease scoreof a handshape in which some of the fingers are closed, then the MOC
98 Chapter Three
Figure 31 Two types of two-group handshapes.
a. b.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 98

applies to the group of fingers that are least flexed (not the group of fin-gers that are closed).
THE SE CRITERION AND THE SF CRITERION
The SE criterion and the SF criterion do not apply in handshapes thathave only one group of fingers. Both apply in handshapes that have twogroups of fingers. In two-group handshapes, one criterion applies to onegroup of fingers and the other applies to the other group of fingers; inother words, the two criteria never apply to the same group. The SEcriterion applies to the least flexed group of fingers as it seeks to deter-mine how much help for extension a finger or finger combination is re-ceiving.20 The SF criterion applies to the most flexed group of fingers. Inall two-group handshapes, the SF criterion pertains to the most flexedgroup of fingers because it is trying to find out how the fingers flex.
THE TS CRITERION AND THE TOT CRITERION
The TS criterion and the TOT criterion apply to both one-group andtwo-group handshapes only if they are relevant. In other words, they ap-ply if all the fingers (in a one-group handshape) or a subset of fingers (ina two-group handshape) are unspread or are opposed to the thumb.
Handshapes that illustrate the TS criterion are shown in a, b, and cof figure 32. In these handshapes, all the fingers are unspread and ex-tended. Logically, they could also be unspread and bent or curved. TheTS criterion applies to all handshapes that have unspread fingers.
When all of the fingers in a one-group handshape or some of the fin-gers in a two-group handshape are opposed to the thumb, then the TOTcriterion applies. Examples of handshapes that demonstrate the TOT cri-terion are also shown in d and e of figure 32. Note, however, that, if all
A Model of Ease of Handshape Articulation 99
20. Whether a finger has an independent extensor also seems to have an effecton bending because, as I show later, the fingers that are easiest to bend are thosethat have independent extensors.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 99

the fingers in a one-group handshape are closed or bent, then neitherof these criteria would apply because no fingers would be extendedor curved (so none could be unspread) and none would be opposed tothe thumb.
Table 9 summarizes the applications of the five criteria. A discus-sion of how to identify the least flexed and most flexed fingers in a hand-shape follows.
DETERMINING THE GROUP WITH THE LEAST AND MOST FLEXION
In handshapes in which one group of fingers is closed, the other groupof fingers might logically be configured one of three ways: extended,
100 Chapter Three
tendency to spread
tendency to oppose the thumb
Figure 32 Handshapes that illustrate the tendency to spread and tendency tooppose the thumb criteria.
a. b. c.
d. e.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 100

bent, or curved. Let us consider a handshape in which one group of fin-gers is closed and the other is bent. The closed fingers are flexed atboth joints, and the bent fingers are flexed only at the metacarpopha-langeal joint.21 Therefore, the group of fingers with the least flexionis the group that is bent. When the curved fingers are flexed at one jointand the closed fingers are flexed at two joints, the curved fingers arethe least flexed. In all three types of handshapes in which one groupof fingers is closed, the most flexed group will always be the closedgroup.
In handshapes in which one group of fingers is extended, the othergroup could logically be configured as curved, bent, or closed. In thesehandshapes, the extended fingers are the least flexed because they arenot flexed at any joint. The most flexed group of fingers will always bethe group that is not extended, in other words, the group that is curved,bent, or closed.
A Model of Ease of Handshape Articulation 101
Table 9. Summary of Criteria Applications
Applications
to one-group to two-groupCriterion handshapes handshapes
Muscle opposition in All fingers Least flexed fingers inconfiguration a rest-closed handshape
Most flexed fingers in a rest-open handshape
Support for extension n.a. Least flexed fingersSupport for flexion n.a. Most flexed fingersTendency to oppose All fingers Fingers opposed to
the thumb the thumbTendency to spread All fingers Fingers that are unspread
21. Recall from chapter 2 that, physiologically, the PIP joints and DIP jointsfunction, for the most part, as one unit.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 101
DERIVING EASE OF ARTICULATION SCORES
Having laid out the criteria and how they apply to handshapes, we arenow ready to explore the actual algorithm we will use to arrive at a scorefor ease of articulation, or the ease score. We determine an ease score foreach logically possible handshape by applying the five criteria to everylogically possible handshape. Most of the logically possible handshapeswill be dealt with by the first three criteria—MOC, SE, and SF—because they are the relevant criteria, and I will discuss this large set ofhandshapes first. After that discussion, I will consider opposed and un-spread handshapes, and in so doing, will explain the last two criteria—TOT and TS.
Earlier in this chapter (see table 7), I assigned a level of difficultyto the four types of configurations in the MOC criterion. The rankingswere as follows: curved (3), extended (2), bent (1), and closed (0). I thenassigned a plus or minus value to handshapes based on the elementsconsidered in the SE and SF criteria. If the fingers have either an inde-pendent extensor or support to extend (SE criterion) or if the middle,ring, and pinky fingers are either all included or all excluded in the actof flexion or extension (SF criterion), then the handshape receives a plusvalue and a score of 0. If the fingers do not have either an independentextensor or support to extend (SE criterion) or if the middle, ring, andpinky fingers are not either all included or all excluded in the act of flex-ion or extension (SF criterion), then the handshape receives a minusvalue and a score of 1.
This system gives points for difficulty, not ease. Plus values, alwaysworth 0, indicate ease whereas minus values, always worth 1, indicate rel-ative difficulty. Handshapes that receive the highest ease scores are moredifficult to articulate than the handshapes with the lowest ease scores.
To calculate ease scores for logically possible handshapes that arespread and unopposed, we add the values for the SE and SF criteria andthen multiply the sum by the value for the MOC criterion, using thefollowing algorithm:
102 Chapter Three
(SE � SF) � MOCof least flexed fingers in a rest-closed handshape and most flexed fingers in a rest-open handshape
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 102

This formula allows us to discover a great deal about a large number oflogically possible handshapes. However, the algorithm is not sufficient topredict ease scores for opposed handshapes and unspread handshapes.
In an opposed handshape, some of the fingers are opposed to thethumb (e.g., see figure 33). In calculating the ease score, I assume thatopposed handshapes are not closed. In fact, I argue that opposed hand-shapes more closely resemble bent handshapes and that this fact oughtto be formally encoded into our algorithm. Therefore, to calculate theease score of an opposed handshape, I begin with the ease score of theanalogous bent handshape and then consider one additional criterion—the TOT criterion. The TOT criterion considers whether a given hand-shape involves only fingers that have a natural tendency to oppose thethumb (i.e., whether it involves the index finger, the middle finger, orboth). Handshapes that do involve these relevant fingers are assigned aplus value in the relevant column. Handshapes that do not involve thesefingers are assigned a minus value in the appropriate column. Plusesreceive a value of 0, and minuses receive a value of 1. The formal algo-rithm is stated as follows:
A Model of Ease of Handshape Articulation 103
(SE � SF) � MOCof least flexed fingers in a rest-closed handshape and most flexed fingers in a rest-open handshape � TOT
two fingers opposed to the thumb all fingers opposed to the thumb
Figure 33 Examples of opposed handshapes.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 103
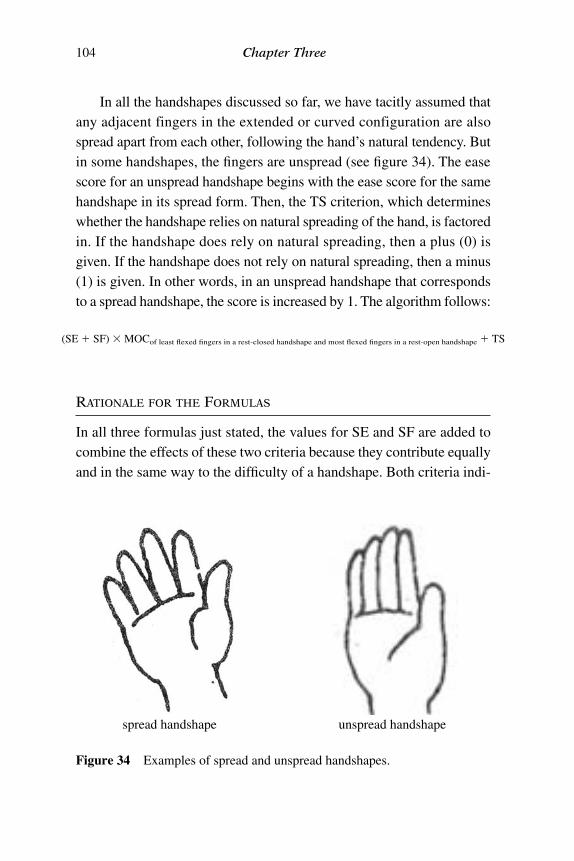
In all the handshapes discussed so far, we have tacitly assumed thatany adjacent fingers in the extended or curved configuration are alsospread apart from each other, following the hand’s natural tendency. Butin some handshapes, the fingers are unspread (see figure 34). The easescore for an unspread handshape begins with the ease score for the samehandshape in its spread form. Then, the TS criterion, which determineswhether the handshape relies on natural spreading of the hand, is factoredin. If the handshape does rely on natural spreading, then a plus (0) isgiven. If the handshape does not rely on natural spreading, then a minus(1) is given. In other words, in an unspread handshape that correspondsto a spread handshape, the score is increased by 1. The algorithm follows:
104 Chapter Three
(SE � SF) � MOCof least flexed fingers in a rest-closed handshape and most flexed fingers in a rest-open handshape � TS
spread handshape unspread handshape
Figure 34 Examples of spread and unspread handshapes.
RATIONALE FOR THE FORMULAS
In all three formulas just stated, the values for SE and SF are added tocombine the effects of these two criteria because they contribute equallyand in the same way to the difficulty of a handshape. Both criteria indi-
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 104

cate which fingers are more capable of combining in a handshape. Takentogether, they account for all five fingers in extension and in flexion.
The MOC criterion is multiplied by the sum of the values for SEand SF. The fact that MOC is multiplied (not added, subtracted, or di-vided) by the sum of the values for the other two criteria expresses theenhanced effect that muscle opposition (as opposed to joint structureor whatever else) has on a configuration’s difficulty.
Both the TOT and the TS criteria, however, begin with the easescore for a similar handshape and add (not multiply) difficulty. The in-tuition here is that the amount of difficulty entailed is not enough to war-rant multiplying the number; rather, the difficulty entailed merely addsto the overall difficulty.
The algorithm uses numbers. Why? Simply put, numbers allow theexplicit description needed for this endeavor. An impressionistic systemwould not be as explicit. Certainly, one could arrive at an ease score byusing another method.22 For example, if all numbers were added or onenumber were divided by another, we might be able to arrive at a reason-able ease score, just as we will with this system. If this possibility is true,then the particular system I have chosen to use may end up not beingthe most appropriate for the task at hand. However, the point of the bookis not to argue for this particular calculation system either as a whole orin part. Rather, the point is to see how linguistic facts about handshapescompare with ease scores of handshapes. To accomplish that task, weneed a clearly articulated system that we can apply to every handshapeacross the board. My system allows us to make judgments about every
A Model of Ease of Handshape Articulation 105
22. An alternative method of computation was suggested to me by DianaArchangeli and Mike Hammond. To calculate the ease score for the handshape bythis method, the score for each group of fingers is multiplied by the value for itsconfiguration, and the values for each group are added. The results are that (a) farmore handshapes are easy, (b) physically impossible handshapes stay the same, andtherefore (c) fewer handshapes remain in the difficult category. This method seemsmore intuitive, but it has two disadvantages, which led me to discard it: (a) the mathis slightly more complex, and (b) the easy category is predicted to be larger than thedifficult category. The evidence suggests that physiologically there are fewer easyhandshapes than difficult ones.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 105
logically possible handshape and to see exactly why, in terms of ease,each handshape falls where it does. I leave it to future research to deter-mine whether the particular algorithm I propose here is the most appro-priate for the observations and intuitions I attempt to capture.
CALCULATING EASE SCORES
This section demonstrates how to calculate ease of articulation scores foreach of the major types of handshapes we are examining. The first cal-culation will involve a one-group handshape, and the second set of cal-culations will involve three different two-group handshapes. Next, I willexplain how to determine an ease score for an opposed handshape, andfinally, I will show how to do so for an unspread handshape. These lasttwo types of handshapes can be one-group or two-group handshapes.
Calculating the Ease Score for a One-Group Handshape
The handshape in figure 35 will provide a good example for calculat-ing the ease score for a one-group handshape. This handshape does nothave two groups of fingers, so it is impossible to locate the least flexedand most flexed fingers. Thus, the SE and SF criteria can apply only tothe handshape as a whole. Because the SE and SF criteria describe op-posite actions (i.e., extension and flexion), in reality, only one will applyto a handshape like that in figure 34—whichever one is more relevantto the handshape.
If we apply the SE criterion to the handshape in figure 35, it willalways be the case that all fingers have either an independent extensor orsufficient support. Therefore, this handshape will receive a plus on theSE criterion and an SE score of 0. Similarly, if we apply the SF criterionto this handshape, it will always be the case that the set of {middle, ring,pinky} act together. Thus, the handshape will receive a plus for the SFcriterion and an SF score of 0. So, a one-group handshape such as infigure 35 will receive a temporary ease score of 0 (SE � SF � 0) forthis set of criteria. The temporary ease score is the result of adding the
106 Chapter Three
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 106

values of the SE and SF criteria as the initial step in determining theconfiguration’s actual ease score.
Next, we multiply the temporary ease score by the number that cor-responds to the ease of the configuration of the handshape (i.e., 0 if itis closed, 1 if it is bent, 2 if it is extended, 3 if it is curved). Because 0multiplied by any number is 0, one-group handshapes such as that in fig-ure 35 will always have an ease score of 0.
Calculating the Ease Score for a Two-Group Handshape
For those two-group handshapes in which one finger, in this case, thethumb, is extended, curved, or bent, figure 36 will serve as a model. Ineach of the three illustrations in figure 36, the rest of the fingers areclosed. We will consider all three examples together because they all,in some sense, might be considered versions of the same handshape.
With two-group handshapes, we have to establish which is the leastflexed group and which is the most flexed group. In the handshapes infigure 36, the least flexed is always the thumb, and the most flexed is al-ways the rest of the fingers. To calculate the ease score, first we applythe SE criterion to the least flexed fingers. The SE criterion determineswhether the extended fingers—the thumb in this case—have either
A Model of Ease of Handshape Articulation 107
Figure 35 A one-group handshape.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 107

(a) an independent extensor or (b) support to extend. In this case, the re-sult is that it does because we know that the thumb is well-supplied withindependent extensors (see chapter 2). Therefore, we can assign a plusand a value of 0 for this criterion. Next, we apply the SF criterion to themost flexed fingers. The SF criterion determines whether the {middle,ring, and pinky}, as a group, are either included or excluded from thisgroup of fingers. They are all included, and so we assign a plus and avalue of 0 to this criterion. The temporary ease score for all three hand-shapes in figure 36 is arrived at by adding the values for the two pluses(see chart 1). The result is 0 (0 � 0 � 0).
Now, we have to factor in the MOC criterion. The MOC criterionessentially determines how hard the least flexed fingers in a rest-closedhandshape are working. We know that closed fingers assume the easi-est of all positions; therefore, because the MOC criterion is concernedwith difficulty, it considers the other fingers. If the thumb were curved,then the temporary ease score would be multiplied by 3 (the level of dif-ficulty for a curved handshape). If the thumb were extended, then thetemporary ease score for the whole handshape would be multiplied by 2(the level of difficulty for an extended handshape). If the thumb werebent, then the temporary ease score would be multiplied by 1 (the levelof difficulty for a bent handshape). The bent configuration is the easi-est of the three. Because 0 multiplied by any number is always 0, thefinal ease score for each of the handshapes in figure 36 is 0 (see chart 2).
108 Chapter Three
Figure 36 Two-group handshapes. The drawing on the far right fromTennant and Brown.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 108
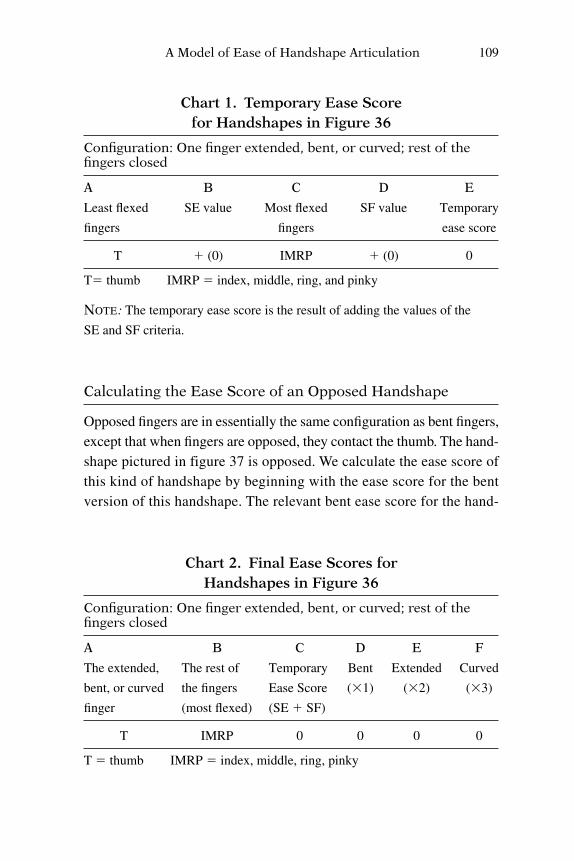
A Model of Ease of Handshape Articulation 109
Chart 1. Temporary Ease Score for Handshapes in Figure 36
Configuration: One finger extended, bent, or curved; rest of thefingers closed
A B C D E
Least flexed SE value Most flexed SF value Temporary
fingers fingers ease score
T � (0) IMRP � (0) 0
T� thumb IMRP � index, middle, ring, and pinky
NOTE: The temporary ease score is the result of adding the values of the
SE and SF criteria.
Chart 2. Final Ease Scores for Handshapes in Figure 36
Configuration: One finger extended, bent, or curved; rest of thefingers closed
A B C D E F
The extended, The rest of Temporary Bent Extended Curved
bent, or curved the fingers Ease Score (�1) (�2) (�3)
finger (most flexed) (SE � SF)
T IMRP 0 0 0 0
T � thumb IMRP � index, middle, ring, pinky
Calculating the Ease Score of an Opposed Handshape
Opposed fingers are in essentially the same configuration as bent fingers,except that when fingers are opposed, they contact the thumb. The hand-shape pictured in figure 37 is opposed. We calculate the ease score ofthis kind of handshape by beginning with the ease score for the bentversion of this handshape. The relevant bent ease score for the hand-
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 109
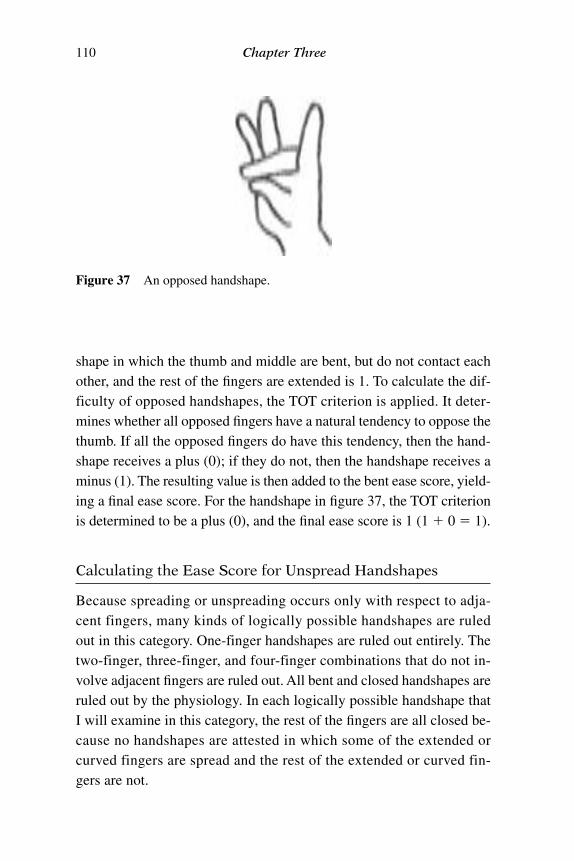
shape in which the thumb and middle are bent, but do not contact eachother, and the rest of the fingers are extended is 1. To calculate the dif-ficulty of opposed handshapes, the TOT criterion is applied. It deter-mines whether all opposed fingers have a natural tendency to oppose thethumb. If all the opposed fingers do have this tendency, then the hand-shape receives a plus (0); if they do not, then the handshape receives aminus (1). The resulting value is then added to the bent ease score, yield-ing a final ease score. For the handshape in figure 37, the TOT criterionis determined to be a plus (0), and the final ease score is 1 (1 � 0 � 1).
Calculating the Ease Score for Unspread Handshapes
Because spreading or unspreading occurs only with respect to adja-cent fingers, many kinds of logically possible handshapes are ruledout in this category. One-finger handshapes are ruled out entirely. Thetwo-finger, three-finger, and four-finger combinations that do not in-volve adjacent fingers are ruled out. All bent and closed handshapes areruled out by the physiology. In each logically possible handshape thatI will examine in this category, the rest of the fingers are all closed be-cause no handshapes are attested in which some of the extended orcurved fingers are spread and the rest of the extended or curved fin-gers are not.
110 Chapter Three
Figure 37 An opposed handshape.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 110
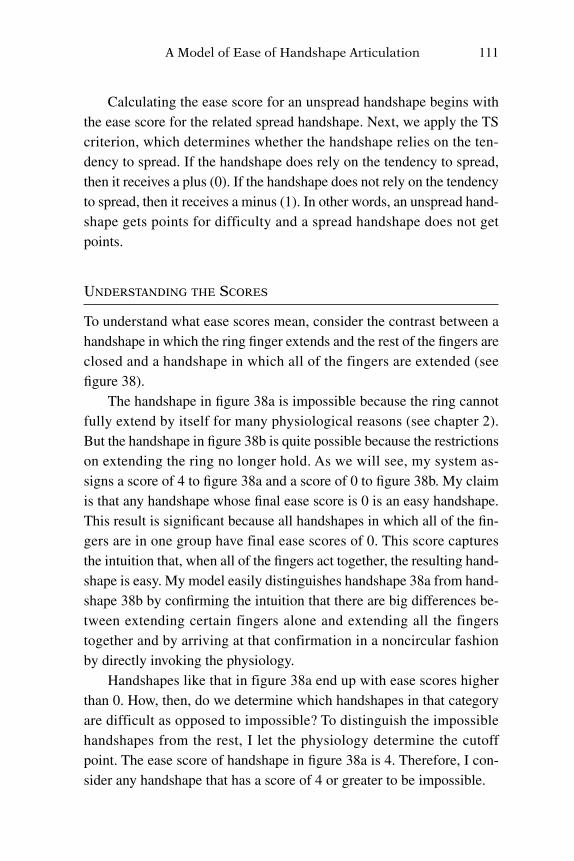
Calculating the ease score for an unspread handshape begins withthe ease score for the related spread handshape. Next, we apply the TScriterion, which determines whether the handshape relies on the ten-dency to spread. If the handshape does rely on the tendency to spread,then it receives a plus (0). If the handshape does not rely on the tendencyto spread, then it receives a minus (1). In other words, an unspread hand-shape gets points for difficulty and a spread handshape does not getpoints.
UNDERSTANDING THE SCORES
To understand what ease scores mean, consider the contrast between ahandshape in which the ring finger extends and the rest of the fingers areclosed and a handshape in which all of the fingers are extended (seefigure 38).
The handshape in figure 38a is impossible because the ring cannotfully extend by itself for many physiological reasons (see chapter 2).But the handshape in figure 38b is quite possible because the restrictionson extending the ring no longer hold. As we will see, my system as-signs a score of 4 to figure 38a and a score of 0 to figure 38b. My claimis that any handshape whose final ease score is 0 is an easy handshape.This result is significant because all handshapes in which all of the fin-gers are in one group have final ease scores of 0. This score capturesthe intuition that, when all of the fingers act together, the resulting hand-shape is easy. My model easily distinguishes handshape 38a from hand-shape 38b by confirming the intuition that there are big differences be-tween extending certain fingers alone and extending all the fingerstogether and by arriving at that confirmation in a noncircular fashionby directly invoking the physiology.
Handshapes like that in figure 38a end up with ease scores higherthan 0. How, then, do we determine which handshapes in that categoryare difficult as opposed to impossible? To distinguish the impossiblehandshapes from the rest, I let the physiology determine the cutoffpoint. The ease score of handshape in figure 38a is 4. Therefore, I con-sider any handshape that has a score of 4 or greater to be impossible.
A Model of Ease of Handshape Articulation 111
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 111
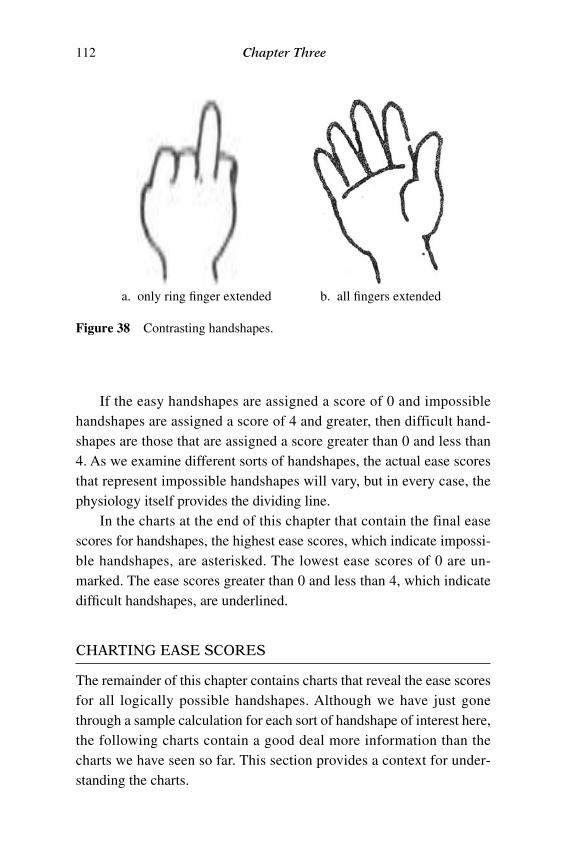
If the easy handshapes are assigned a score of 0 and impossiblehandshapes are assigned a score of 4 and greater, then difficult hand-shapes are those that are assigned a score greater than 0 and less than4. As we examine different sorts of handshapes, the actual ease scoresthat represent impossible handshapes will vary, but in every case, thephysiology itself provides the dividing line.
In the charts at the end of this chapter that contain the final easescores for handshapes, the highest ease scores, which indicate impossi-ble handshapes, are asterisked. The lowest ease scores of 0 are un-marked. The ease scores greater than 0 and less than 4, which indicatedifficult handshapes, are underlined.
CHARTING EASE SCORES
The remainder of this chapter contains charts that reveal the ease scoresfor all logically possible handshapes. Although we have just gonethrough a sample calculation for each sort of handshape of interest here,the following charts contain a good deal more information than thecharts we have seen so far. This section provides a context for under-standing the charts.
112 Chapter Three
a. only ring finger extended b. all fingers extended
Figure 38 Contrasting handshapes.
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 112

Chart 3 is called an A chart, and it replaces chart 1, which containsinformation about the three logically possible handshapes in figure 36.Chart 3 contains information about fifteen logically possible handshapesin which one finger is extended, bent, or curved and the rest of the fin-gers are closed. Column A lists each of the fingers, starting with thethumb. As in chart 1, the rest of the fingers in each case are listed in therelevant row of column C. In row 1, where the thumb is the single finger,the rest of the fingers are the index, middle, ring, and pinky, abbrevi-ated IMRP. The information in columns B and D shows the result ofapplying the SE and SF criteria, respectively, to the particular set ofhandshapes.
To arrive at the final ease score for the handshapes in chart 3, thetemporary ease score is multiplied by the value for the MOC criterion ofthe least flexed fingers. The final ease scores for the handshapes inwhich one finger is extended, bent, or curved are given in chart 4. Allcharts that give the same information as chart 4 will be referred to asB charts.
A Model of Ease of Handshape Articulation 113
Chart 3. Temporary Ease Scores (SE � SF)
A
Configuration: One finger extended, bent, or curved; rest of thefingers closed
A B C D ELeast flexed SE Most flexed SF Temporaryfingers fingers ease score
T � (0) IMRP � (0) 0
I � (0) TMRP � (0) 0
M � (1) TIRP � (1) 2
R � (1) TIMP � (1) 2
P � (0) TIMR � (1) 1
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 113

Column A and column C in chart 3 correspond to column A and col-umn B in chart 4. Again, columns A and B in chart 4 show what eachgroup of fingers is doing: column A shows that the least flexed group isextended, bent, or curved, and column B shows that the rest of the fin-gers are closed. Column C in chart 4 gives the temporary ease scorefrom column E in chart 3.
To find the final ease score, we have to multiply the temporary easescore by the level of difficulty (determined by applying the MOC crite-rion). If the least flexed fingers are bent, we multiply by 1; if they areextended, we multiply by 2; and if they are curved, we multiply by 3.After the MOC has been figured into the overall ease of a handshape, theresult is placed in columns D, E, and F in chart 4. Thus, the final easescores for this set of logically possible one-finger handshapes appearin columns D, E, and F.
Chart 5 presents a compression of the information in chart 4. Iinclude only the final ease scores for the fifteen logically possible hand-
114 Chapter Three
Chart 4. Results of (SE � SF) � MOC
B
Configuration: One finger extended, bent, or curved; rest of thefingers closed
A B C D E FThe extended, The rest of Temporary Bent Extended Curvedbent, or curved the fingers ease score (�1) (�2) (�3)finger
T IMRP 0 0 0 0
I TMRP 0 0 0 0
M TIRP 2 2 4 6
R TIMP 2 2 4 6
P TIMR 1 1 2 3
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 114
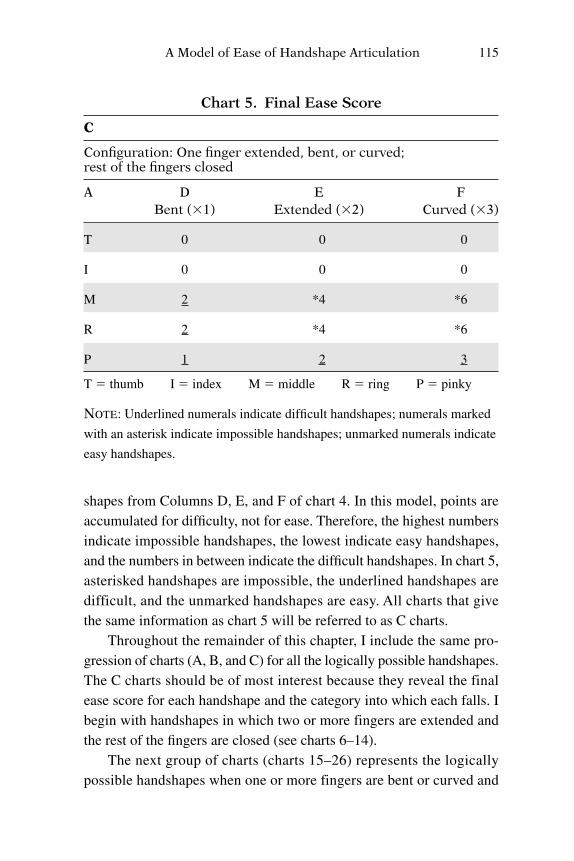
A Model of Ease of Handshape Articulation 115
Chart 5. Final Ease Score
C
Configuration: One finger extended, bent, or curved; rest of the fingers closed
A D E FBent (�1) Extended (�2) Curved (�3)
T 0 0 0
I 0 0 0
M 2 *4 *6
R 2 *4 *6
P 1 2 3
T � thumb I � index M � middle R � ring P � pinky
NOTE: Underlined numerals indicate difficult handshapes; numerals marked
with an asterisk indicate impossible handshapes; unmarked numerals indicate
easy handshapes.
shapes from Columns D, E, and F of chart 4. In this model, points areaccumulated for difficulty, not for ease. Therefore, the highest numbersindicate impossible handshapes, the lowest indicate easy handshapes,and the numbers in between indicate the difficult handshapes. In chart 5,asterisked handshapes are impossible, the underlined handshapes aredifficult, and the unmarked handshapes are easy. All charts that givethe same information as chart 5 will be referred to as C charts.
Throughout the remainder of this chapter, I include the same pro-gression of charts (A, B, and C) for all the logically possible handshapes.The C charts should be of most interest because they reveal the finalease score for each handshape and the category into which each falls. Ibegin with handshapes in which two or more fingers are extended andthe rest of the fingers are closed (see charts 6–14).
The next group of charts (charts 15–26) represents the logicallypossible handshapes when one or more fingers are bent or curved and
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 115
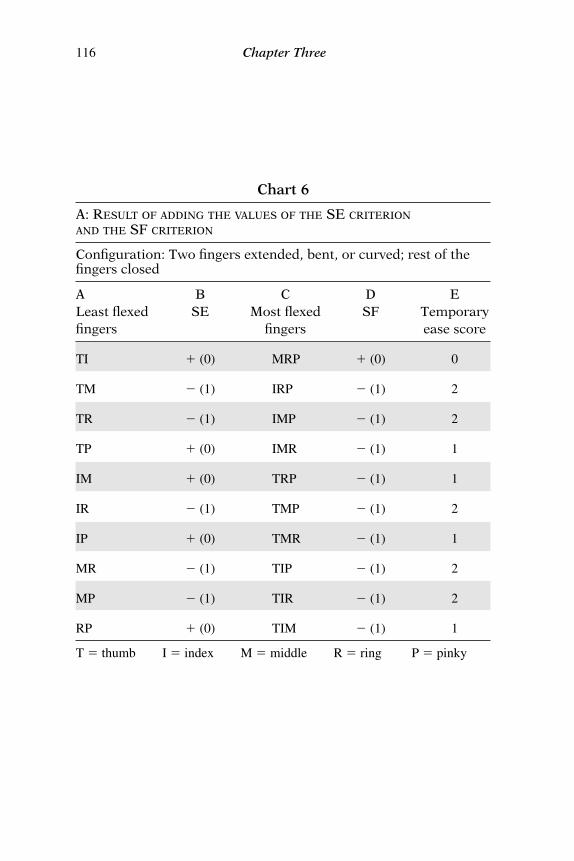
116 Chapter Three
Chart 6
A: RESULT OF ADDING THE VALUES OF THE SE CRITERION
AND THE SF CRITERION
Configuration: Two fingers extended, bent, or curved; rest of thefingers closed
A B C D ELeast flexed SE Most flexed SF Temporary fingers fingers ease score
TI � (0) MRP � (0) 0
TM � (1) IRP � (1) 2
TR � (1) IMP � (1) 2
TP � (0) IMR � (1) 1
IM � (0) TRP � (1) 1
IR � (1) TMP � (1) 2
IP � (0) TMR � (1) 1
MR � (1) TIP � (1) 2
MP � (1) TIR � (1) 2
RP � (0) TIM � (1) 1
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 116

A Model of Ease of Handshape Articulation 117
Chart 7
B: RESULT OF APPLYING THE MOC CRITERION TO THE SUM
OF THE SE � SF CRITERIA
Configuration: Two fingers extended, bent, or curved; rest of thefingers closed
A B C D E FThe extended, The rest Temporary Bent Extended Curvedbent, or of the ease (�1) (�2) (�3)curved finger fingers score
TI MRP 0 0 0 0
TM IRP 2 2 4 6
TR IMP 2 2 4 6
TP IMR 1 1 2 3
IM TRP 1 1 2 3
IR TMP 2 2 4 6
IP TMR 1 1 2 3
MR TIP 2 2 4 6
MP TIR 2 2 4 6
RP TIM 1 1 2 3
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 117
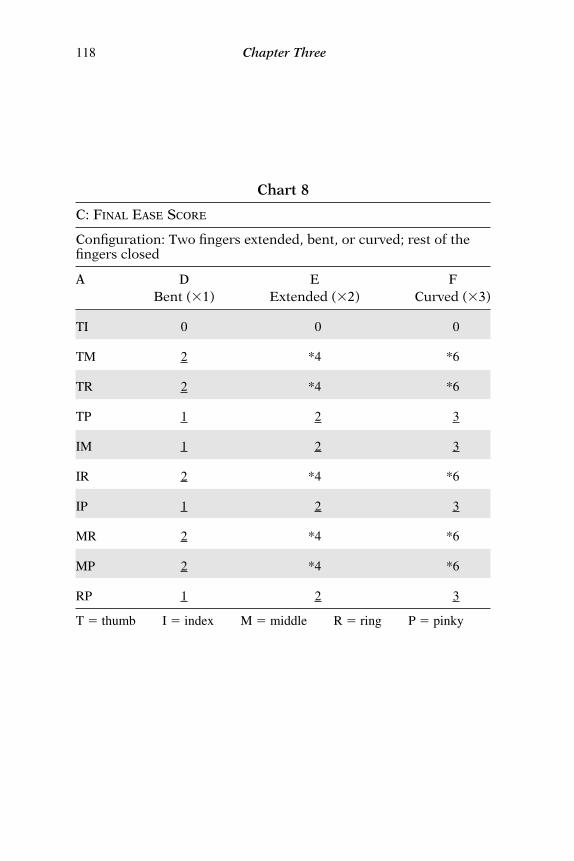
118 Chapter Three
Chart 8
C: FINAL EASE SCORE
Configuration: Two fingers extended, bent, or curved; rest of thefingers closed
A D E FBent (�1) Extended (�2) Curved (�3)
TI 0 0 0
TM 2 *4 *6
TR 2 *4 *6
TP 1 2 3
IM 1 2 3
IR 2 *4 *6
IP 1 2 3
MR 2 *4 *6
MP 2 *4 *6
RP 1 2 3
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 118
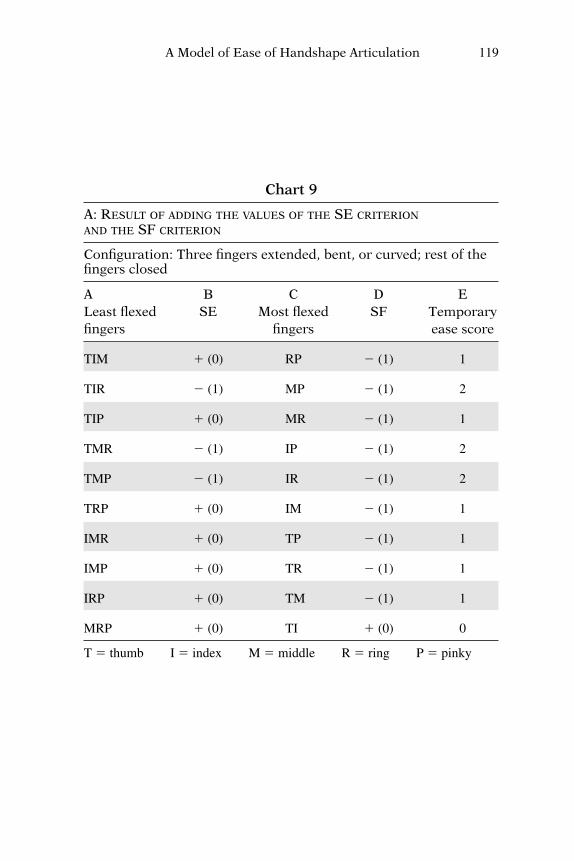
A Model of Ease of Handshape Articulation 119
Chart 9
A: RESULT OF ADDING THE VALUES OF THE SE CRITERION
AND THE SF CRITERION
Configuration: Three fingers extended, bent, or curved; rest of thefingers closed
A B C D ELeast flexed SE Most flexed SF Temporary fingers fingers ease score
TIM � (0) RP � (1) 1
TIR � (1) MP � (1) 2
TIP � (0) MR � (1) 1
TMR � (1) IP � (1) 2
TMP � (1) IR � (1) 2
TRP � (0) IM � (1) 1
IMR � (0) TP � (1) 1
IMP � (0) TR � (1) 1
IRP � (0) TM � (1) 1
MRP � (0) TI � (0) 0
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 119

120 Chapter Three
Chart 10
B: RESULT OF APPLYING THE MOC CRITERION TO THE SUM
OF THE SE � SF CRITERIA
Configuration: Three fingers extended, bent, or curved; rest of thefingers closed
A B C D E FThe extended, The rest Temporary Bent Extended Curvedbent, or of the ease (�1) (�2) (�3)curved finger fingers score
TIM RP 1 1 2 3
TIR MP 2 2 4 6
TIP MR 1 1 2 3
TMR IP 2 2 4 6
TMP IR 2 2 4 6
TRP IM 1 1 2 3
IMR TP 1 1 2 3
IMP TR 1 1 2 3
IRP TM 1 1 2 3
MRP TI 0 0 0 0
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 120

A Model of Ease of Handshape Articulation 121
Chart 11
C: FINAL EASE SCORE
Configuration: Three fingers extended, bent, or curved; rest of thefingers closed
A D E FBent Extended Curved(�1) (�2) (�3)
TIM 1 2 3
TIR 2 *4 *6
TIP 1 2 3
TMR 2 *4 *6
TMP 2 *4 *6
TRP 1 2 3
IMR 1 2 3
IMP 1 2 3
IRP 1 2 3
MRP 0 0 0
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 121

122
Chart 12
A: RESULT OF ADDING THE VALUES OF THE SE CRITERION
AND THE SF CRITERION
Configuration: Four fingers extended, bent, or curved; rest of thefingers closed
A B C D ELeast flexed SE Most flexed SF Temporaryfingers fingers ease score
TIMR � (0) P � (1) 1
TIMP � (0) R � (1) 1
TIRP � (0) M � (1) 1
TMRP � (0) I � (0) 0
IMRP � (0) T � (0) 0
T � thumb I � index M � middle R � ring P � pinky
Chart 13
B: RESULT OF APPLYING THE MOC CRITERION TO THE SUM
OF THE SE � SF CRITERIA
Configuration: Four fingers extended, bent, or curved; rest of thefingers closed
A B C D E FThe extended, The rest Temporary Bent Extended Curvedbent, or of the ease (�1) (�2) (�3)curved finger fingers score
TIMR P 1 1 2 3
TIMP R 1 1 2 3
TIRP M 1 1 2 3
TMRP I 0 0 0 0
IMRP T 0 0 0 0
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 122
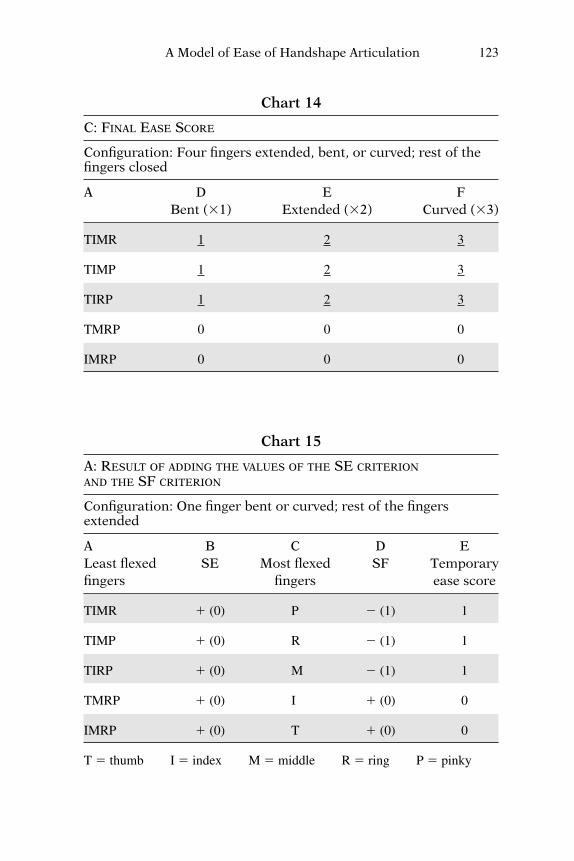
A Model of Ease of Handshape Articulation 123
Chart 14
C: FINAL EASE SCORE
Configuration: Four fingers extended, bent, or curved; rest of thefingers closed
A D E FBent (�1) Extended (�2) Curved (�3)
TIMR 1 2 3
TIMP 1 2 3
TIRP 1 2 3
TMRP 0 0 0
IMRP 0 0 0
Chart 15
A: RESULT OF ADDING THE VALUES OF THE SE CRITERION
AND THE SF CRITERION
Configuration: One finger bent or curved; rest of the fingersextended
A B C D ELeast flexed SE Most flexed SF Temporaryfingers fingers ease score
TIMR � (0) P � (1) 1
TIMP � (0) R � (1) 1
TIRP � (0) M � (1) 1
TMRP � (0) I � (0) 0
IMRP � (0) T � (0) 0
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 123
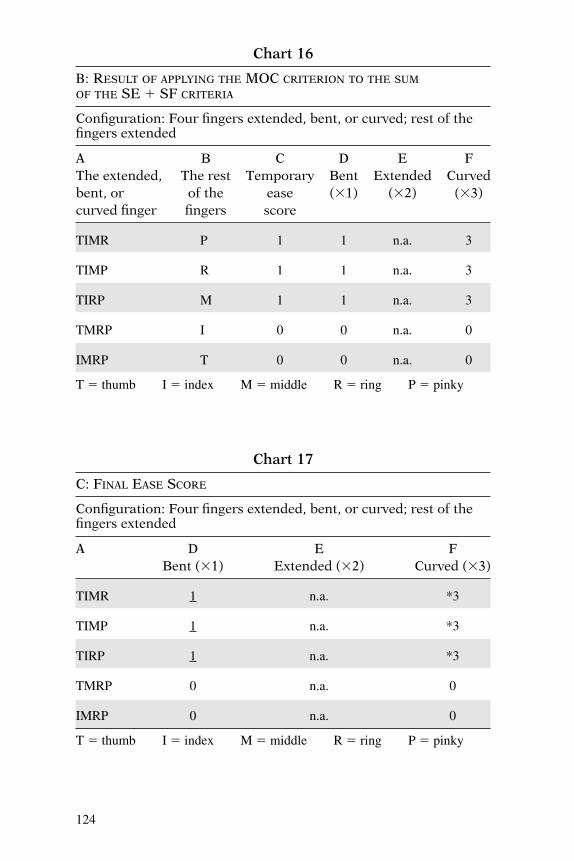
124
Chart 16
B: RESULT OF APPLYING THE MOC CRITERION TO THE SUM
OF THE SE � SF CRITERIA
Configuration: Four fingers extended, bent, or curved; rest of thefingers extended
A B C D E FThe extended, The rest Temporary Bent Extended Curvedbent, or of the ease (�1) (�2) (�3)curved finger fingers score
TIMR P 1 1 n.a. 3
TIMP R 1 1 n.a. 3
TIRP M 1 1 n.a. 3
TMRP I 0 0 n.a. 0
IMRP T 0 0 n.a. 0
T � thumb I � index M � middle R � ring P � pinky
Chart 17
C: FINAL EASE SCORE
Configuration: Four fingers extended, bent, or curved; rest of thefingers extended
A D E FBent (�1) Extended (�2) Curved (�3)
TIMR 1 n.a. *3
TIMP 1 n.a. *3
TIRP 1 n.a. *3
TMRP 0 n.a. 0
IMRP 0 n.a. 0
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 124
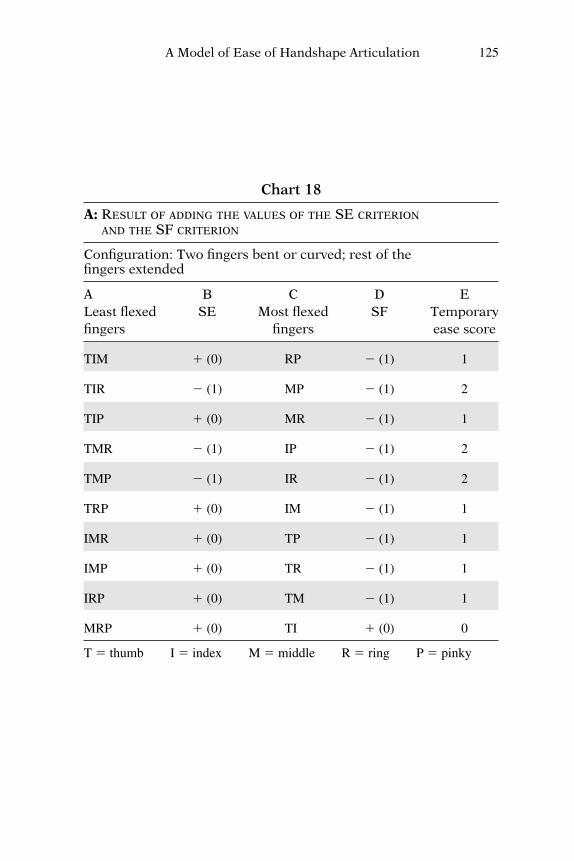
A Model of Ease of Handshape Articulation 125
Chart 18
A: RESULT OF ADDING THE VALUES OF THE SE CRITERION
AND THE SF CRITERION
Configuration: Two fingers bent or curved; rest of the fingers extended
A B C D ELeast flexed SE Most flexed SF Temporaryfingers fingers ease score
TIM � (0) RP � (1) 1
TIR � (1) MP � (1) 2
TIP � (0) MR � (1) 1
TMR � (1) IP � (1) 2
TMP � (1) IR � (1) 2
TRP � (0) IM � (1) 1
IMR � (0) TP � (1) 1
IMP � (0) TR � (1) 1
IRP � (0) TM � (1) 1
MRP � (0) TI � (0) 0
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 125
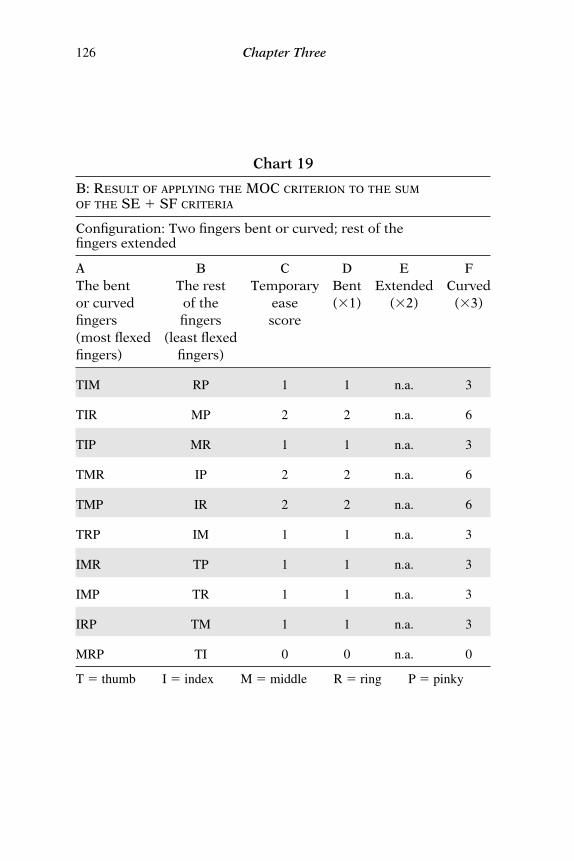
126 Chapter Three
Chart 19
B: RESULT OF APPLYING THE MOC CRITERION TO THE SUM
OF THE SE � SF CRITERIA
Configuration: Two fingers bent or curved; rest of the fingers extended
A B C D E FThe bent The rest Temporary Bent Extended Curvedor curved of the ease (�1) (�2) (�3)fingers fingers score(most flexed (least flexedfingers) fingers)
TIM RP 1 1 n.a. 3
TIR MP 2 2 n.a. 6
TIP MR 1 1 n.a. 3
TMR IP 2 2 n.a. 6
TMP IR 2 2 n.a. 6
TRP IM 1 1 n.a. 3
IMR TP 1 1 n.a. 3
IMP TR 1 1 n.a. 3
IRP TM 1 1 n.a. 3
MRP TI 0 0 n.a. 0
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 126
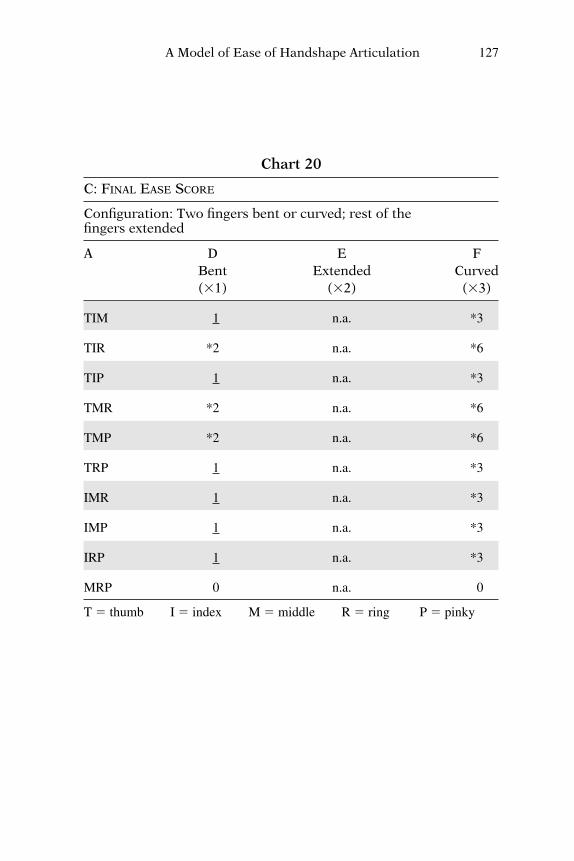
A Model of Ease of Handshape Articulation 127
Chart 20
C: FINAL EASE SCORE
Configuration: Two fingers bent or curved; rest of the fingers extended
A D E FBent Extended Curved(�1) (�2) (�3)
TIM 1 n.a. *3
TIR *2 n.a. *6
TIP 1 n.a. *3
TMR *2 n.a. *6
TMP *2 n.a. *6
TRP 1 n.a. *3
IMR 1 n.a. *3
IMP 1 n.a. *3
IRP 1 n.a. *3
MRP 0 n.a. 0
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 127

128 Chapter Three
Chart 21
A: RESULT OF ADDING THE VALUES OF THE SE CRITERION
AND THE SF CRITERION
Configuration: Three fingers bent or curved; rest of the fingers extended
A B C D ELeast flexed SE Most flexed SF Temporaryfingers fingers ease score
TI � (0) MRP � (0) 0
TM � (1) IRP � (1) 2
TR � (1) IMP � (1) 2
TP � (0) IMR � (1) 1
IM � (0) TRP � (1) 1
IR � (1) TMP � (1) 2
IP � (0) TMR � (1) 1
MR � (1) TIP � (1) 2
MP � (1) TIR � (1) 2
RP � (0) TIM � (1) 1
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 128
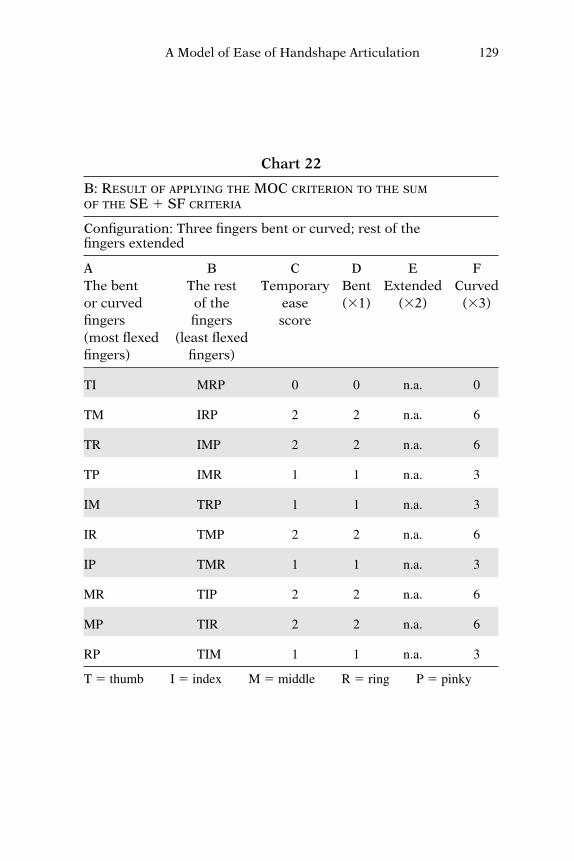
A Model of Ease of Handshape Articulation 129
Chart 22
B: RESULT OF APPLYING THE MOC CRITERION TO THE SUM
OF THE SE � SF CRITERIA
Configuration: Three fingers bent or curved; rest of the fingers extended
A B C D E FThe bent The rest Temporary Bent Extended Curvedor curved of the ease (�1) (�2) (�3)fingers fingers score(most flexed (least flexedfingers) fingers)
TI MRP 0 0 n.a. 0
TM IRP 2 2 n.a. 6
TR IMP 2 2 n.a. 6
TP IMR 1 1 n.a. 3
IM TRP 1 1 n.a. 3
IR TMP 2 2 n.a. 6
IP TMR 1 1 n.a. 3
MR TIP 2 2 n.a. 6
MP TIR 2 2 n.a. 6
RP TIM 1 1 n.a. 3
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 129
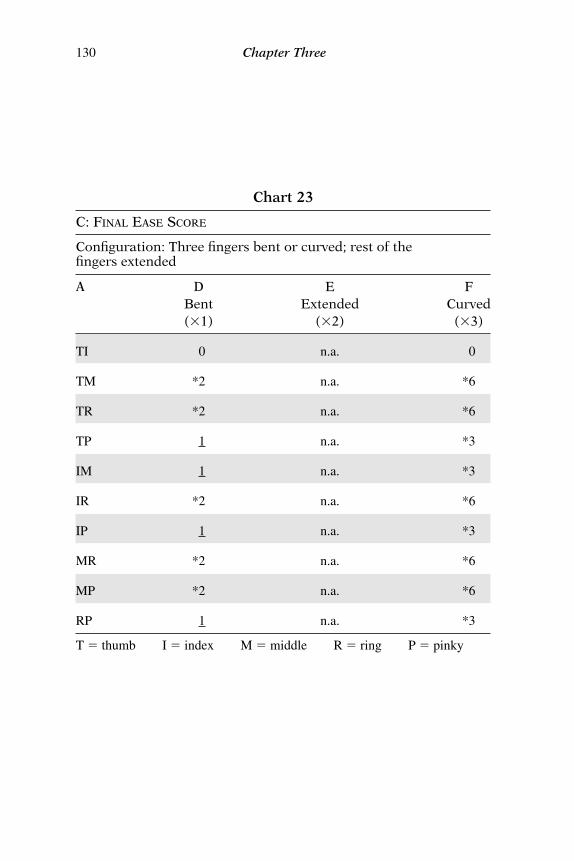
130 Chapter Three
Chart 23
C: FINAL EASE SCORE
Configuration: Three fingers bent or curved; rest of the fingers extended
A D E FBent Extended Curved(�1) (�2) (�3)
TI 0 n.a. 0
TM *2 n.a. *6
TR *2 n.a. *6
TP 1 n.a. *3
IM 1 n.a. *3
IR *2 n.a. *6
IP 1 n.a. *3
MR *2 n.a. *6
MP *2 n.a. *6
RP 1 n.a. *3
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 130

131
Chart 24
A: RESULT OF ADDING THE VALUES OF THE SE CRITERION
AND THE SF CRITERION
Configuration: Four fingers bent or curved; rest of the fingers extended
A B C D ELeast flexed SE Most flexed fingers SF Temporaryfingers bent or curved ease score
T � (0) IMRP � (0) 0
I � (0) TMRP � (0) 0
M � (1) TIRP � (1) 2
R � (1) TIMP � (1) 2
P � (0) TIMR � (1) 1
T � thumb I � index M � middle R � ring P � pinky
Chart 25
B: RESULT OF APPLYING THE MOC CRITERION TO THE SUM
OF THE SE � SF CRITERIA
Configuration: Four fingers bent or curved; rest of the fingers extended
A B C D E FThe bent or The rest of Temporary Bent Extended Curvedcurved finger the fingers ease score (�1) (�2) (�3)
T TMRP 0 0 n.a. 0
I TMRP 0 0 n.a. 0
M TIRP 2 2 n.a. 6
R TIMP 2 2 n.a. 6
P TIMR 1 1 n.a. 3
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 131

the rest of the fingers are extended, not closed. The score for easyhandshapes remains the same: 0. However, if we allow the physiol-ogy to draw the line between the impossible handshapes and the rest,the impossible handshapes have ease scores of 2 and above (as op-posed to the scores of the impossible rest-closed handshapes, whichwere 4 and above). Consequently, the difficult handshapes have easescores of 1.
The following charts, charts 27–33, establish the final ease scoresfor handshapes in which fingers are opposed to the thumb. The layoutstrategy of A, B, and C charts is modified here because all the informa-tion necessary to arrive at a final ease score fits into one chart. A finalease score of 0 in column D means the handshape is easy, a score of1–2 means a handshape is difficult, and a score of 3–4 indicates thatthe handshape is impossible. The familiar conventions—easy is un-marked, difficult is underlined, impossible is asterisked—apply.
132 Chapter Three
Chart 26
C: FINAL EASE SCORE
Configuration: One finger extended bent or curved; rest of thefingers extended
A D E FBent or Bent Extended Curvedcurved finger (�1) (�2) (�3)
T 0 n.a. 0
I 0 n.a. 0
M *2 n.a. *6
R *2 n.a. *6
P 1 n.a. *3
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 132

133
Chart 27
FINAL EASE SCORE RESULTING FROM CONSIDERING THE TOT CRITERION
Configuration: One finger opposes the thumb; rest of the fingersextended
Bent TOT Temporary Finalscore criterion ease score ease score
A B C D
I opposes T 0 � (0) 0 0
M opposes T 1 � (0) 1 1
R opposes T 1 � (1) 2 2
P opposes T 1 � (1) 2 2
T � thumb I � index M � middle R � ring P � pinky
Chart 28
FINAL EASE SCORE RESULTING FROM CONSIDERING THE TOT CRITERION
Configuration: Two fingers oppose the thumb; rest of the fingers extended
Bent TOT Temporary Final score criterion ease score ease score
A B C D
I, M oppose T 1 � (0) 1 1
I, R oppose T 2 � (1) 3 *3
I, P oppose T 2 � (1) 3 *3
M, R oppose T 1 � (1) 2 2
M, P oppose T 2 � (1) 3 *3
R, P oppose T 1 � (1) 2 2
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 133

134 Chapter Three
Chart 29
FINAL EASE SCORE RESULTING FROM CONSIDERING THE TOT CRITERION
Configuration: Three fingers oppose the thumb; rest of the fingers extended
Bent TOT Temporary Finalscore criterion ease score ease score
A B C D
I, M, R oppose T 1 � (1) 2 2
I, M, P oppose T 2 � (1) 3 *3
I, R, P oppose T 2 � (1) 3 *3
M, R, P oppose T 0 � (1) 1 1
T � thumb I � index M � middle R � ring P � pinky
Chart 30
FINAL EASE SCORE RESULTING FROM CONSIDERING THE TOT CRITERION
Configuration: One finger opposes the thumb; rest of the fingers closed
Bent TOT Temporary Finalscore criterion ease score ease score
A B C D
I opposes T 0 � (0) 0 0
M opposes T 2 � (0) 2 2
R opposes T 2 � (1) 3 *3
P opposes T 1 � (1) 2 2
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 134

135
Chart 31
FINAL EASE SCORE RESULTING FROM CONSIDERING THE TOT CRITERION
Configuration: Two fingers oppose the thumb; rest of the fingers closed
Bent TOT Temporary Finalscore criterion ease score ease score
A B C D
I, M oppose T 1 � (0) 1 1
I, R oppose T 2 � (1) 3 *3
I, P oppose T 1 � (1) 2 2
M, R oppose T 2 � (1) 3 *3
M, P oppose T 2 � (1) 3 *3
R, P oppose T 1 � (1) 2 2
T � thumb I � index M � middle R � ring P � pinky
Chart 32
FINAL EASE SCORE RESULTING FROM CONSIDERING THE TOT CRITERION
Configuration: Three fingers oppose the thumb; rest of the fingers closed
Bent TOT Temporary Finalscore criterion ease score ease score
A B C D
I, M, R oppose T 1 � (1) 2 2
I, M, P oppose T 1 � (1) 2 2
I, R, P oppose T 1 � (1) 2 2
M, R, P oppose T 0 � (1) 1 1
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 135

In chart 34, we examine the result of applying the TS criterion,which determines whether the handshape makes use of the natural ten-dency to spread. All of the handshapes in chart 34 do not, so all receivea minus (1). Final ease scores are calculated in columns D (for ex-tended) and E (for curved). All unspread handshapes are, at the least,difficult.
SUMMARY
In this chapter, I have constructed a theory of ease of articulation ofhandshapes on the basis of physiological facts and have determined ex-plicit ease scores for a great number of logically possible handshapes.The C charts in the matrix of charts 3–26 provide a final ease score forhandshapes to which we applied the first three criteria: MOC, SE, andSF. Charts 27–33 provide the ease scores for the remainder of hand-shapes to which we applied the TOT and TS criteria.
From this analysis, we have formed three groups of handshapes:those that are easy (all have ease scores of 0), those that are difficult(those that have the intermediate ease scores), and those that are physi-cally impossible (those that have the highest ease scores). These resultsare summarized in table 10 on page 138.
136 Chapter Three
Chart 33
FINAL EASE SCORE RESULTING FROM CONSIDERING THE TOT CRITERION
Configuration: Four fingers oppose the thumb
Bent TOT Temporary Finalscore criterion ease score ease score
A B C D
I, M, R, P oppose T 0 � (1) 1 1
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 136

A Model of Ease of Handshape Articulation 137
Chart 34
FINAL EASE SCORE RESULTING FROM CONSIDERING THE TS CRITERION
Configuration: Some number of fingers unspread; the rest of thefingers closed
A B C D E
Final ease score
Fingers Extended/ Curved/ TS Extended/ Curved/unspread spread spread criterion unspread unspread
ease easescore score
TI 0 0 � (1) 1 1
IM 2 3 � (1) 3 4
MR 4 6 � (1) *5 *7
RP 2 3 � (1) 3 4
TIM 2 3 � (1) 3 4
IMR 2 3 � (1) 3 4
MRP 0 0 � (1) 1 1
TIMR 2 3 � (1) 3 4
IMRP 0 0 � (1) 1 1
TIMRP 0 0 � (1) 1 1
T � thumb I � index M � middle R � ring P � pinky
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 137

In my model, all easy handshapes receive a score of 0. Conse-quently, no claims are made about the relative ease of handshapes in thiscategory. Similarly, although some impossible handshapes have higherease scores than others, one impossible handshape is not consideredmore impossible than another. So, again, no claims are made about therelative ease of handshapes in this category.
In contrast, the model does make claims about which of the difficulthandshapes are more difficult than others. For example, handshapes inwhich the pinky is extended, bent, or curved and the rest of the fingersare closed all are analyzed as being difficult. But extending the pinkyis more difficult to do than curving (compare the ease score of 3 forcurved with 2 for extended). Bending the pinky (ease score of 1) is eas-ier still. Intriguing as this analysis may be, this work does not test any ofthese predictions, leaving these claims open for future research.
We are now in a position to compare the ease scores we have de-termined for logically possible handshapes with the number of occur-rences of a particular handshape in Taiwan Sign Language.
138 Chapter Three
Table 10. Dividing Lines for Categories of Handshapes by Ease Score
Ease Rest of Rest of Fingers Fingerscategory of fingers fingers opposed curved orhandshape closed extended to thumb extended and
unspread
Easy 0 0 0 0Difficult 1–3 1 1–2 1–4Impossible 4–6 2–6 3–4 5–7
ch03_8033_JeanAnn_Gallaudet 9/1/06 12:41 PM Page 138

Chapter Four
Ease and Frequency Compared
To establish a relationship between ease of articulation and frequency ofoccurrence, I first had to examine how frequently different handshapesoccur. For this study, I used the handshapes found in Taiwan Sign Lan-guage (TSL). I calculated two types of frequency: type frequency, or thenumber of different signs in which a particular handshape occurs, andtoken frequency, or the number of times a handshape occurs in naturalconversation. My sources were Your Hands Can Become a Bridge: SignLanguage Manual, volumes 1 and 2 (Smith and Ting 1979, 1984), andportions of two videotaped conversations.
TYPE FREQUENCY OF HANDSHAPES IN TSL
The Smith and Ting volumes are regarded as the most authoritativesource on TSL signs in isolation. A total of 1,336 signs appear in the twovolumes. I counted each entry to arrive at the type frequency of occur-rence for each handshape and found a corpus of fifty-six handshapes(see table 12 on page 149–52).
However, I have excluded a few TSL handshapes from my analysisfor various reasons, knowing that, eventually, these handshapes have tobe integrated into any theory of ease of articulation. The first excludedhandshape occurs only in the TSL sign GINGER (see figure 39a). Thishandshape is excluded because it goes against two generalizations: first,that there are four configurations that fingers can assume in a sign lan-guage, and second, that no handshape can be divided into more than two
139
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:48 PM Page 139

groups. To understand what makes figure 39a so anomalous, one shouldtry to produce it. To do so, begin by forming a handshape in which allthe fingers are curved (similar to the ASL E handshape except keep thecurved thumb to the radial side of the index, not touching the fingertips).Now, splay the fingers just at the metacarpophalangeal joint in the fol-lowing manner: (a) keep the flexion at the proximal interphalangealand distal interphalangeal joints; (b) configure the index metacarpo-phalangeal joint so there is full flexion (i.e., close the index finger); then(c) configure the middle finger with slightly less flexion, the ring fingerwith even less, and the pinky finger with full extension at the metacar-pophalangeal joint. The result is a handshape with a cascading effect,each finger assuming a sort of mountaintop shape at points along animaginary arc.
The next three excluded handshapes (see figures 39b, 39c, and 39d)all violate Mandel’s (1981) finger position constraint. In other words,they are composed of more than two groups of fingers. In 39b, the ringand pinky are closed, the middle is bent, the index is extended, and thethumb is extended but resting on the middle. Figures 39c and 39d couldbe described in a similarly detailed manner that would reveal that theyeach have more than two groups.
The final three handshapes that I exclude (see figures 39e, 39f, and39g) are very close to handshapes that I do consider. The handshape infigure 39e is essentially a fist, except that the thumb is inside the closedfingers instead of outside. In figure 39f, the index and middle are crossed,which is quite similar to the handshape with the index and middle un-spread and extended (similar to the ASL U handshape). Their similar-ity to other handshapes notwithstanding, the system I have proposed tocategorize handshapes cannot accommodate these two handshapes. Oneother handshape that deserves mention is the handshape pictured in fig-ure 39g. That handshape strongly resembles the TSL 10 handshape—the same as the ASL X handshape. I did not consider the handshape infigure 39g to be different when I wrote Ann (1993a), and therefore, Iignored it in that document. However, here, I include it because I can de-rive an ease score for it.
140 Chapter Four
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:48 PM Page 140
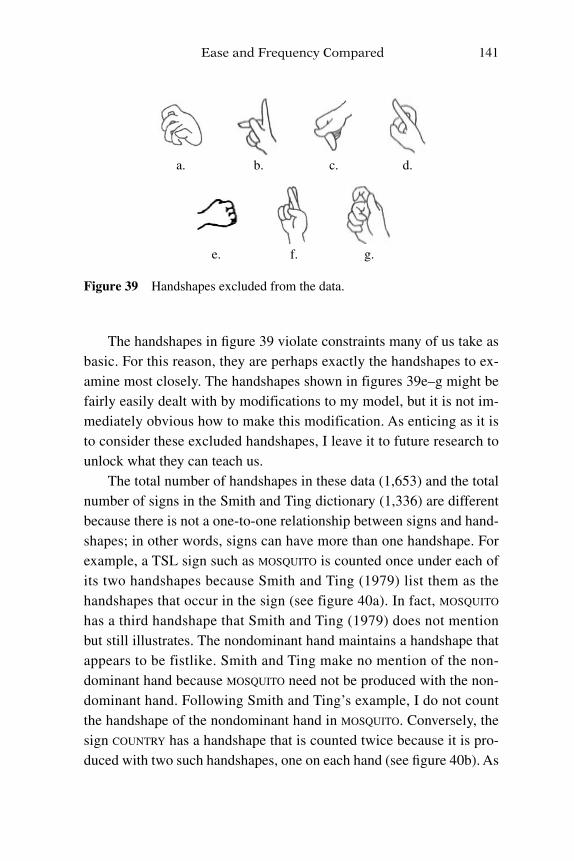
The handshapes in figure 39 violate constraints many of us take asbasic. For this reason, they are perhaps exactly the handshapes to ex-amine most closely. The handshapes shown in figures 39e–g might befairly easily dealt with by modifications to my model, but it is not im-mediately obvious how to make this modification. As enticing as it isto consider these excluded handshapes, I leave it to future research tounlock what they can teach us.
The total number of handshapes in these data (1,653) and the totalnumber of signs in the Smith and Ting dictionary (1,336) are differentbecause there is not a one-to-one relationship between signs and hand-shapes; in other words, signs can have more than one handshape. Forexample, a TSL sign such as MOSQUITO is counted once under each ofits two handshapes because Smith and Ting (1979) list them as thehandshapes that occur in the sign (see figure 40a). In fact, MOSQUITO
has a third handshape that Smith and Ting (1979) does not mentionbut still illustrates. The nondominant hand maintains a handshape thatappears to be fistlike. Smith and Ting make no mention of the non-dominant hand because MOSQUITO need not be produced with the non-dominant hand. Following Smith and Ting’s example, I do not countthe handshape of the nondominant hand in MOSQUITO. Conversely, thesign COUNTRY has a handshape that is counted twice because it is pro-duced with two such handshapes, one on each hand (see figure 40b). As
Ease and Frequency Compared 141
a. b. c. d.
e. f. g.
Figure 39 Handshapes excluded from the data.
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 141

much as possible, I follow Smith and Ting’s analysis of which hand-shapes occur in signs.
FREQUENCY OF TSL HANDSHAPES IN CONVERSATION
To obtain a corpus of signs used in natural TSL conversation, I video-taped two, approximately hour-long, conversations between two sepa-rate pairs of adult native signers (total of four different signers) at theTainan School for the Deaf in southern Taiwan. Portions of these con-versations were chosen arbitrarily to be transcribed by a group of lin-guistics graduate students at National Chung Cheng University in Chia-yi, Taiwan. The group consisted of one hearing native TSL signer andfour hearing nonnative TSL learners. The graduate students transcribeda total of twenty minutes and twenty-four seconds worth of TSL con-versation into both Chinese (using hanyu pinyin, the major Chinese ro-manization system currently in use) and English. Thirteen minutes andfive seconds worth of data came from one conversation, and seven min-utes and nineteen seconds came from the other. A corpus of 2,242 signswas created from these conversations. The graduate students, who werevery familiar with Smith and Ting (1979, 1984), indicated in their trans-lations whether or not the signs they had transcribed appeared in thebooks. Of approximately every 100 signs transcribed, approximatelyfour did not appear in the Smith and Ting books and, consequently, werenot considered in this work. Approximately another 90 signs were notconsidered because they could not be found in the Smith and Ting books
142 Chapter Four
Handshapes inMOSQUITO
a.
Handshape inCOUNTRY
b.
Figure 40 Signs with more than one handshape counted in the data.
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 142

for various reasons, including typographical errors or glossing. The re-maining signs that were considered included signs that were repeatedduring the course of the conversation.
The English transcripts were then examined by a nonsigning,English-speaking undergraduate student studying linguistics. The stu-dent used the English word in the translation, looked up each sign inthe Smith and Ting books, and listed its handshapes. She calculated thenumber of times each handshape occurred, regardless of the hand onwhich it occurred. She included each sign once in her calculations, pro-viding the type frequency of the handshapes used in TSL conversation(see table 13 on page 153–57).
The next step was to count every instance of every handshape todetermine the token frequency of each handshape. This process involvedcounting each occurrence of every handshape. Using Smith and Ting(1979, 1984) as a reference, anytime a handshape appeared on any handin a sign, it was logged in these data. If a two-handed sign used the samehandshape for both hands, the handshape was counted twice. In two-handed signs with different handshapes, each handshape was countedonce. In signs with handshape change, each handshape was countedonce. By analyzing the data, I determined how frequently each of thefifty-six handshapes in Smith and Ting was used in TSL conversation(see table 14 on page 158–62).
GENERALIZATIONS ABOUT HANDSHAPE FREQUENCY
Several things are worth noting at this point. First, inspection of the datashows that, indeed, some handshapes occur a great deal more than oth-ers. The conversational data show that some handshapes have a rela-tively high token frequency and some have a relatively low token fre-quency. The conversational data also show that some handshapes have ahigh type frequency and others have a very low type frequency, even aslow as 0. In the Smith and Ting data, the lowest type frequency is 1,not 0, because if the handshape is included in the dictionary, it must bethere because at least one sign includes it.
Ease and Frequency Compared 143
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 143
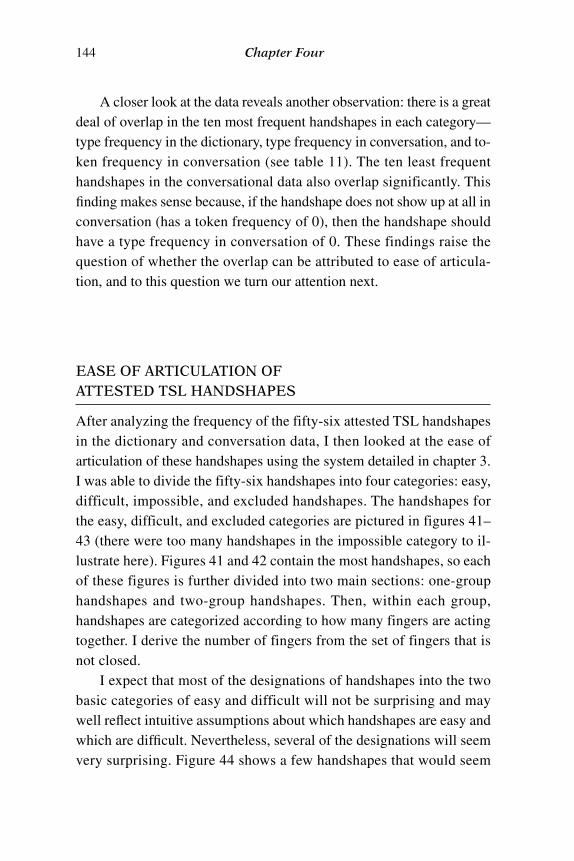
A closer look at the data reveals another observation: there is a greatdeal of overlap in the ten most frequent handshapes in each category—type frequency in the dictionary, type frequency in conversation, and to-ken frequency in conversation (see table 11). The ten least frequenthandshapes in the conversational data also overlap significantly. Thisfinding makes sense because, if the handshape does not show up at all inconversation (has a token frequency of 0), then the handshape shouldhave a type frequency in conversation of 0. These findings raise thequestion of whether the overlap can be attributed to ease of articula-tion, and to this question we turn our attention next.
EASE OF ARTICULATION OF ATTESTED TSL HANDSHAPES
After analyzing the frequency of the fifty-six attested TSL handshapesin the dictionary and conversation data, I then looked at the ease ofarticulation of these handshapes using the system detailed in chapter 3.I was able to divide the fifty-six handshapes into four categories: easy,difficult, impossible, and excluded handshapes. The handshapes forthe easy, difficult, and excluded categories are pictured in figures 41–43 (there were too many handshapes in the impossible category to il-lustrate here). Figures 41 and 42 contain the most handshapes, so eachof these figures is further divided into two main sections: one-grouphandshapes and two-group handshapes. Then, within each group,handshapes are categorized according to how many fingers are actingtogether. I derive the number of fingers from the set of fingers that isnot closed.
I expect that most of the designations of handshapes into the twobasic categories of easy and difficult will not be surprising and maywell reflect intuitive assumptions about which handshapes are easy andwhich are difficult. Nevertheless, several of the designations will seemvery surprising. Figure 44 shows a few handshapes that would seem
144 Chapter Four
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 144
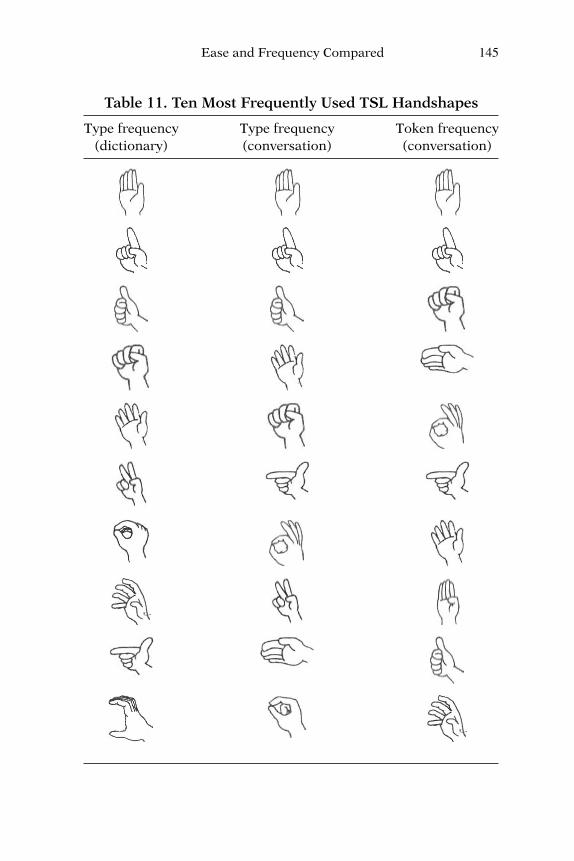
Ease and Frequency Compared 145
Table 11. Ten Most Frequently Used TSL Handshapes
Type frequency Type frequency Token frequency(dictionary) (conversation) (conversation)
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 145

to be easy but are difficult by my criteria. In principle, many morecould be listed, but these seem the most obvious. By my criteria, un-spread handshapes are difficult, yet figures 44a and 44b show unspreadhandshapes that seem to be easy. Handshapes involving the middlefinger (without the pinky and ring fingers) become increasingly diffi-
146 Chapter Four
five-finger
one-finger
two-finger
three-finger
four-finger
Figure 41 Easy TSL handshapes.
One-group handshapes
Two-group handshapes
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 146
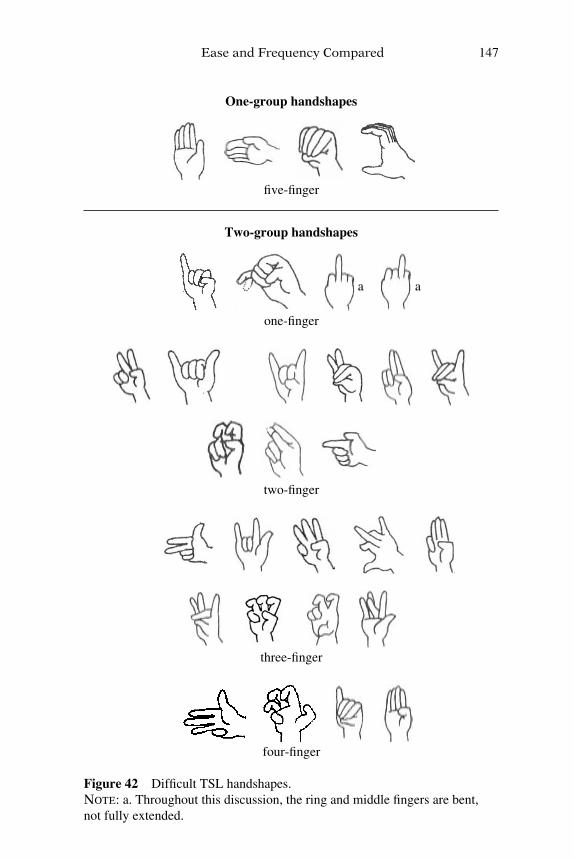
Ease and Frequency Compared 147
five-finger
one-finger
two-finger
three-finger
four-finger
Figure 42 Difficult TSL handshapes.NOTE: a. Throughout this discussion, the ring and middle fingers are bent,not fully extended.
One-group handshapes
Two-group handshapes
aa
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 147

cult; the middle finger has the joint structure but not the muscle supportto extend, even with the ring finger. So, figures 44c through 44f are dif-ficult because they include the middle finger—even though they seemeasy to make.
Tables 12–14 present the TSL handshapes divided into three groups:type frequency from the dictionary, type frequency from conversation,and token frequency from conversation. I list the handshapes from mostto least frequent, with each handshape’s ease of articulation as deter-mined according to my system.
TESTING THE HYPOTHESIS
It is very obvious, and probably expected, that each handshape by it-self does not confirm the hypothesis that the most frequently occurringhandshapes are the easiest to articulate. The relevant issue, however, is
148 Chapter Four
Figure 43 Excluded TSL handshapes.
a. b. c.
d. e. f.
Figure 44 Handshapes that look easy but are classified as difficult to articulate.
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 148

Ease and Frequency Compared 149
Tab
le 1
2. T
ype
Fre
qu
ency
of
Occ
urr
ence
an
d E
ase
of
Art
icu
lati
on
o
f H
and
shap
es, b
ased
on
Dic
tio
nar
y D
ata
Han
dsh
apes
Typ
e fr
equ
ency
Eas
e of
H
and
shap
esT
ype
freq
uen
cy
Eas
e of
(m
ost
to le
ast)
arti
cula
tion
(mos
t to
leas
t)ar
ticu
lati
on
385
diffi
cult
196
easy
101
easy
79ea
sy
72ea
sy
67di
fficu
lt
63ea
sy
57ea
sy
54ea
sy
49di
fficu
lt
40di
fficu
lt
37ea
sy
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 149

150 Chapter Four
Tab
le 1
2.(c
on
tin
ued
)
Han
dsh
apes
Typ
e fr
equ
ency
Eas
e of
H
and
shap
esT
ype
freq
uen
cy
Eas
e of
(m
ost
to le
ast)
arti
cula
tion
(mos
t to
leas
t)ar
ticu
lati
on
32di
fficu
lt
28ea
sy
25di
fficu
lt
25ea
sy
20di
fficu
lt
19di
fficu
lt
19di
fficu
lt
18ea
sy
17ea
sy
17di
fficu
lt
17ea
sy
16ea
sy
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 150

Ease and Frequency Compared 151
15di
fficu
lt
12di
fficu
lt
12di
fficu
lt
11di
fficu
lt
11ea
sy
10di
fficu
lt
9di
fficu
lt
6ea
sy
5di
fficu
lt
5ea
sy
5di
fficu
lt
5di
fficu
lt
4di
fficu
lt
4di
fficu
lt
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 151

152 Chapter Four
Tab
le 1
2.(c
on
tin
ued
)
Han
dsh
apes
Typ
e fr
equ
ency
Eas
e of
H
and
shap
esT
ype
freq
uen
cy
Eas
e of
(m
ost
to le
ast)
arti
cula
tion
(mos
t to
leas
t)ar
ticu
lati
on
3di
fficu
lt
3di
fficu
lt
3di
fficu
lt
2ea
sy
1di
fficu
lt
1di
fficu
lt
1di
fficu
lt
1di
fficu
lt
1di
fficu
lt
1di
fficu
lt
0di
fficu
lt
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 152

Ease and Frequency Compared 153
Tab
le 1
3.T
ype
Fre
qu
ency
an
d E
ase
of
Art
icu
lati
on
of
Han
dsh
apes
, B
ased
on
Co
nve
rsat
ion
Dat
a
Han
dsh
apes
Typ
e fr
equ
ency
Eas
e of
H
and
shap
esT
ype
freq
uen
cy
Eas
e of
(m
ost
to le
ast)
arti
cula
tion
(mos
t to
leas
t)ar
ticu
lati
on
123
diffi
cult
64ea
sy
32ea
sy
29ea
sy
28ea
sy
24ea
sy
22ea
sy
17di
fficu
lt
14di
fficu
lt
12ea
sy
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 153
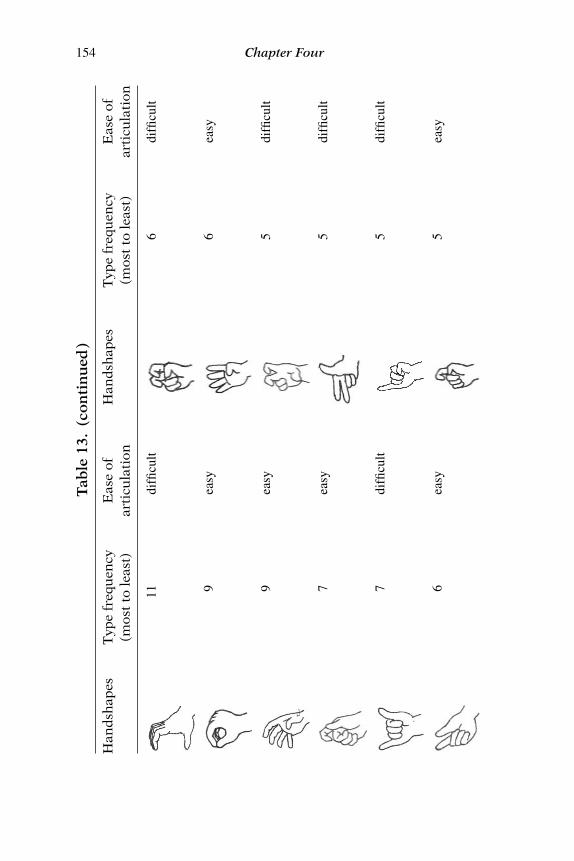
154 Chapter Four
Tab
le 1
3.(c
on
tin
ued
)
Han
dsh
apes
Typ
e fr
equ
ency
Eas
e of
H
and
shap
esT
ype
freq
uen
cy
Eas
e of
(m
ost
to le
ast)
arti
cula
tion
(mos
t to
leas
t)ar
ticu
lati
on
11di
fficu
lt
9ea
sy
9ea
sy
7ea
sy
7di
fficu
lt
6ea
sy
6di
fficu
lt
6ea
sy
5di
fficu
lt
5di
fficu
lt
5di
fficu
lt
5ea
sy
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 154
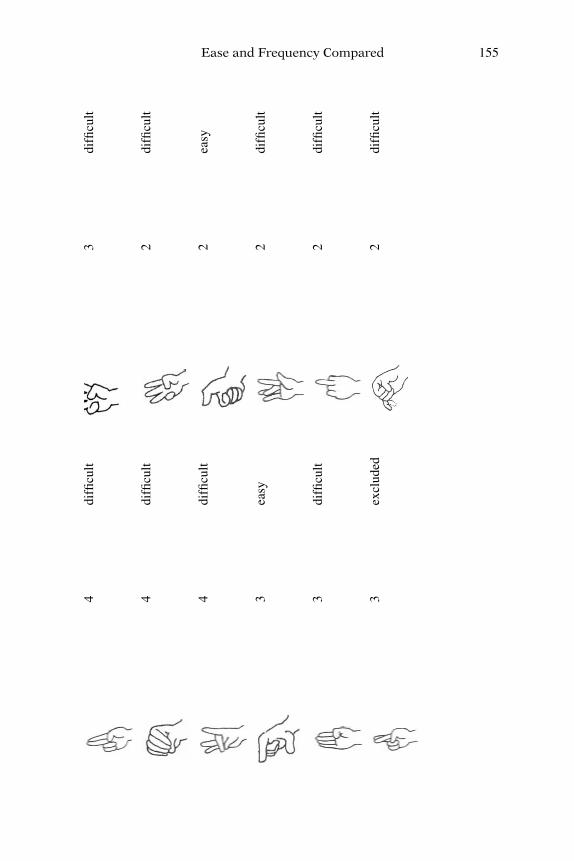
Ease and Frequency Compared 155
4di
fficu
lt
4di
fficu
lt
4di
fficu
lt
3ea
sy
3di
fficu
lt
3ex
clud
ed
3di
fficu
lt
2di
fficu
lt
2ea
sy
2di
fficu
lt
2di
fficu
lt
2di
fficu
lt
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 155

156 Chapter Four
Tab
le 1
3.(c
on
tin
ued
)
Han
dsh
apes
Typ
e fr
equ
ency
Eas
e of
H
and
shap
esT
ype
freq
uen
cy
Eas
e of
(m
ost
to le
ast)
arti
cula
tion
(mos
t to
leas
t)ar
ticu
lati
on
1di
fficu
lt
1di
fficu
lt
1ea
sy
1di
fficu
lt
1ex
clud
ed
1ea
sy
1ea
sy
1di
fficu
lt
1ea
sy
1ex
clud
ed
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 156

Ease and Frequency Compared 157
1di
fficu
lt
0di
fficu
lt
0di
fficu
lt
0ex
clud
ed
0di
fficu
lt
0di
fficu
lt
0ex
clud
ed
0di
fficu
lt
0di
fficu
lt
0ex
clud
ed
0ea
sy
0di
fficu
lt
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 157
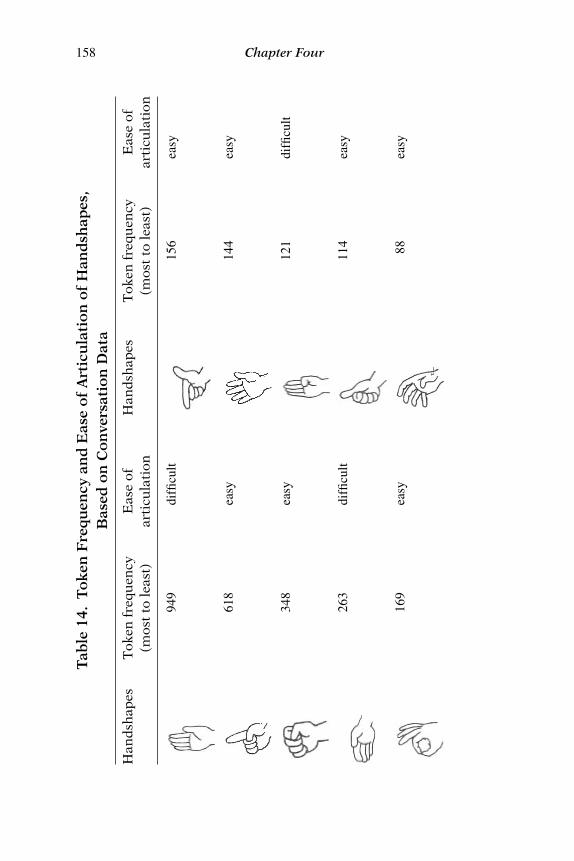
158 Chapter Four
Tab
le 1
4.T
ok
en F
req
uen
cy a
nd
Eas
e o
f A
rtic
ula
tio
n o
f H
and
shap
es,
Bas
ed o
n C
on
vers
atio
n D
ata
Han
dsh
apes
Tok
en f
requ
ency
Eas
e of
H
and
shap
esT
oken
fre
quen
cy
Eas
e of
(m
ost
to le
ast)
arti
cula
tion
(mos
t to
leas
t)ar
ticu
lati
on
949
diffi
cult
618
easy
348
easy
263
diffi
cult
169
easy
156
easy
144
easy
121
diffi
cult
114
easy
88ea
sy
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 158
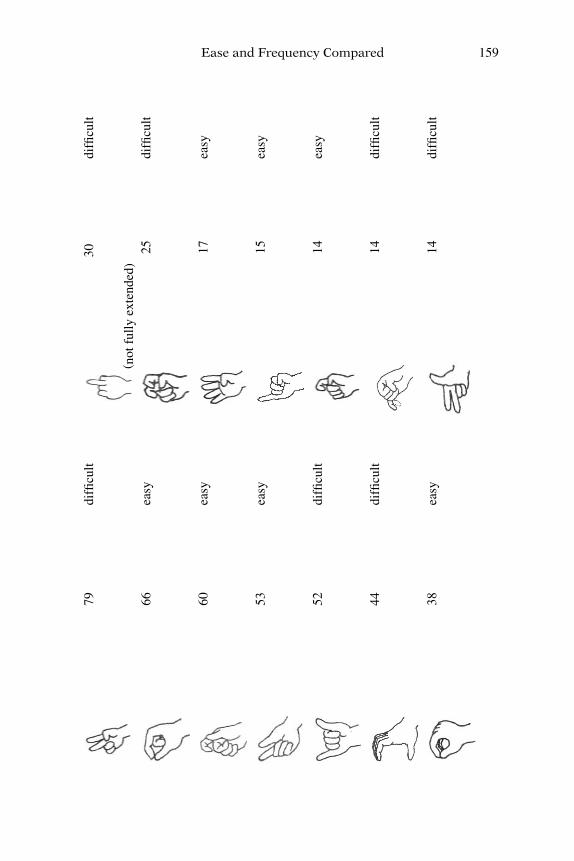
Ease and Frequency Compared 159
79di
fficu
lt
66ea
sy
60ea
sy
53ea
sy
52di
fficu
lt
44di
fficu
lt
38ea
sy
( not
ful
ly e
xten
ded)
30di
fficu
lt
25di
fficu
lt
17ea
sy
15ea
sy
14ea
sy
14di
fficu
lt
14di
fficu
lt
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 159
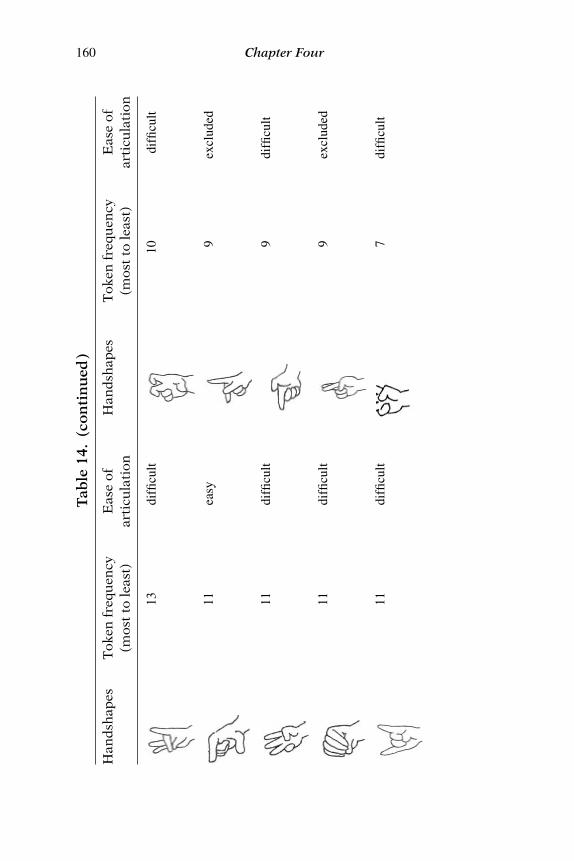
160 Chapter Four
Tab
le 1
4.(c
on
tin
ued
)
Han
dsh
apes
Tok
en f
requ
ency
Eas
e of
H
and
shap
esT
oken
fre
quen
cy
Eas
e of
(m
ost
to le
ast)
arti
cula
tion
(mos
t to
leas
t)ar
ticu
lati
on
13di
fficu
lt
11ea
sy
11di
fficu
lt
11di
fficu
lt
11di
fficu
lt
10di
fficu
lt
9ex
clud
ed
9di
fficu
lt
9ex
clud
ed
7di
fficu
lt
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 160

Ease and Frequency Compared 161
7di
fficu
lt
6di
fficu
lt
5di
fficu
lt
3ea
sy
3di
fficu
lt
2ea
sy
2ea
sy
2ea
sy
2di
fficu
lt
1ea
sy
1ex
clud
ed
1di
fficu
lt
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 161

162 Chapter Four
Tab
le 1
4.(c
on
tin
ued
)
Han
dsh
apes
Tok
en f
requ
ency
Eas
e of
H
and
shap
esT
oken
fre
quen
cy
Eas
e of
(m
ost
to le
ast)
arti
cula
tion
(mos
t to
leas
t)ar
ticu
lati
on
0di
fficu
lt
0ex
clud
ed
0di
fficu
lt
0di
fficu
lt
0ex
clud
ed
0di
fficu
lt
0di
fficu
lt
0ex
clud
ed
0ea
sy
0di
fficu
lt
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 162
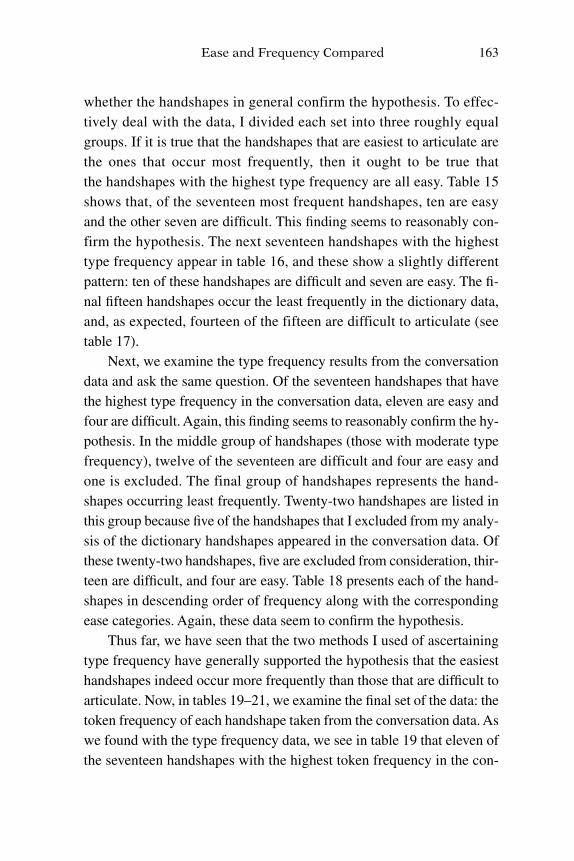
whether the handshapes in general confirm the hypothesis. To effec-tively deal with the data, I divided each set into three roughly equalgroups. If it is true that the handshapes that are easiest to articulate arethe ones that occur most frequently, then it ought to be true thatthe handshapes with the highest type frequency are all easy. Table 15shows that, of the seventeen most frequent handshapes, ten are easyand the other seven are difficult. This finding seems to reasonably con-firm the hypothesis. The next seventeen handshapes with the highesttype frequency appear in table 16, and these show a slightly differentpattern: ten of these handshapes are difficult and seven are easy. The fi-nal fifteen handshapes occur the least frequently in the dictionary data,and, as expected, fourteen of the fifteen are difficult to articulate (seetable 17).
Next, we examine the type frequency results from the conversationdata and ask the same question. Of the seventeen handshapes that havethe highest type frequency in the conversation data, eleven are easy andfour are difficult. Again, this finding seems to reasonably confirm the hy-pothesis. In the middle group of handshapes (those with moderate typefrequency), twelve of the seventeen are difficult and four are easy andone is excluded. The final group of handshapes represents the hand-shapes occurring least frequently. Twenty-two handshapes are listed inthis group because five of the handshapes that I excluded from my analy-sis of the dictionary handshapes appeared in the conversation data. Ofthese twenty-two handshapes, five are excluded from consideration, thir-teen are difficult, and four are easy. Table 18 presents each of the hand-shapes in descending order of frequency along with the correspondingease categories. Again, these data seem to confirm the hypothesis.
Thus far, we have seen that the two methods I used of ascertainingtype frequency have generally supported the hypothesis that the easiesthandshapes indeed occur more frequently than those that are difficult toarticulate. Now, in tables 19–21, we examine the final set of the data: thetoken frequency of each handshape taken from the conversation data. Aswe found with the type frequency data, we see in table 19 that eleven ofthe seventeen handshapes with the highest token frequency in the con-
Ease and Frequency Compared 163
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 163

164 Chapter Four
Table 15. Ease of Articulation of the SeventeenHandshapes with the Highest Type Frequency
(Dictionary Data)
Handshapes Ease of articulation
1.
difficult
2.
easy
3.
easy
4.
easy
5.
easy
6.
difficult
7.
easy
8.
easy
versation data are easy and six are difficult. This finding is another con-firmation of the hypothesis. In the next group of handshapes (see table20), two are excluded, eleven are difficult, and four are easy. In this case,it seems that more difficult handshapes are being used in conversation
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 164

Ease and Frequency Compared 165
Table 15. (continued)
Handshapes Ease of articulation
9.
easy
10.
difficult
11.
difficult
12.
easy
13.
difficult
14.
easy
15.
difficult
16.
easy
17.
difficult
than we might predict. Finally, table 21 contains the token frequencies inthe conversational data for the remainder of TSL handshapes. Of the fi-nal twenty-two handshapes, three are excluded, thirteen are difficult, andsix are easy. Again, the hypothesis seems to be confirmed.
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 165

166 Chapter Four
Table 16. Ease of Articulation of the SeventeenHandshapes with Moderate Type Frequency
(Dictionary Data)
Handshapes Ease of articulation
18. difficult
19. difficult
20. easy
21. easy
22. difficult
23. easy
24. easy
25. difficult
The numbers of the most frequent handshapes that are easy and thenumbers of the least frequent handshapes that are difficult, when lookedat in terms of type and token frequency, seem to clearly support theclaim that the most frequent handshapes are the easiest to articulate.Probably the most egregious counterexample to this claim is the mostcommon handshape of all—the unspread flat hand. This handshape oc-curs in many signs, suggesting that it would have not only a high type
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 166

Ease and Frequency Compared 167
Table 16. (continued)
Handshapes Ease of articulation
26. difficult
27. difficult
28. difficult
29. easy
30. difficult
31. difficult
32. easy
33. difficult
34. easy
23. A similar handshape (see figure 3c) is considered easy. In this handshape,all five fingers are bent. Because the whole hand participates, application of my cri-teria to the handshape leads to the handshape being considered easy to articulate,although the fingers are unspread; it is physiologically impossible for a handshapethat is bent (flexed at the metacarpophalangeal joint) to be spread.
frequency but also a high token frequency, and it does. However, thishandshape is difficult to articulate.23 My system finds the handshape dif-
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 167
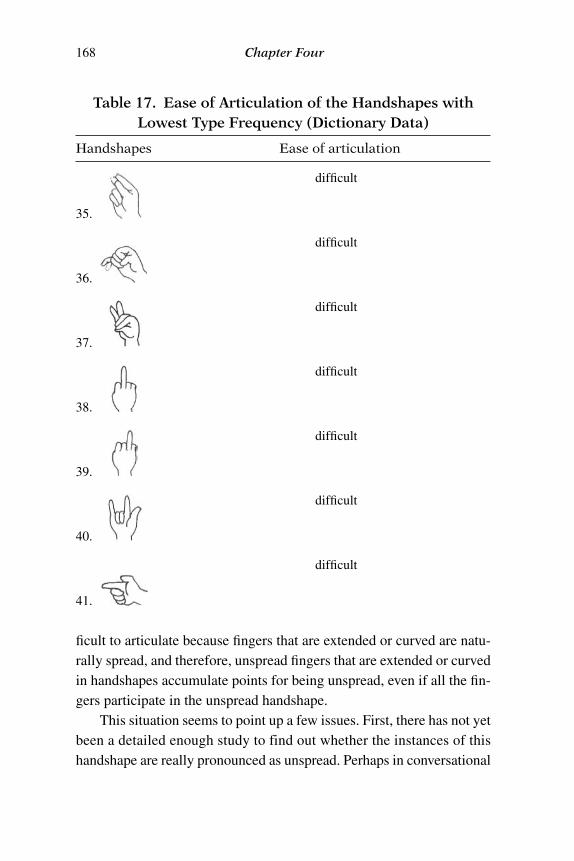
Table 17. Ease of Articulation of the Handshapes withLowest Type Frequency (Dictionary Data)
Handshapes Ease of articulation
35.
difficult
36.
difficult
37.
difficult
38.
difficult
39.
difficult
40.
difficult
41.
difficult
168 Chapter Four
ficult to articulate because fingers that are extended or curved are natu-rally spread, and therefore, unspread fingers that are extended or curvedin handshapes accumulate points for being unspread, even if all the fin-gers participate in the unspread handshape.
This situation seems to point up a few issues. First, there has not yetbeen a detailed enough study to find out whether the instances of thishandshape are really pronounced as unspread. Perhaps in conversational
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 168
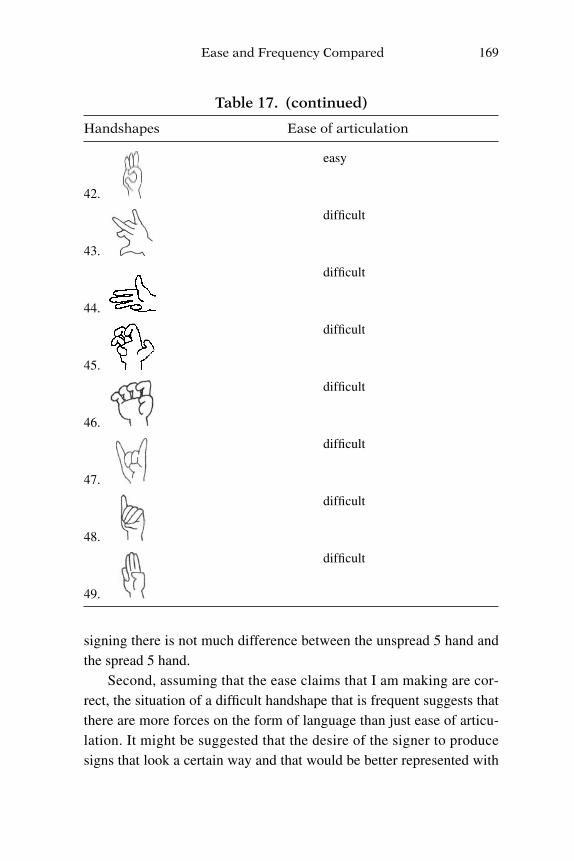
Table 17. (continued)
Handshapes Ease of articulation
42.
easy
43.
difficult
44.
difficult
45.
difficult
46.
difficult
47.
difficult
48.
difficult
49.
difficult
Ease and Frequency Compared 169
signing there is not much difference between the unspread 5 hand andthe spread 5 hand.
Second, assuming that the ease claims that I am making are cor-rect, the situation of a difficult handshape that is frequent suggests thatthere are more forces on the form of language than just ease of articu-lation. It might be suggested that the desire of the signer to producesigns that look a certain way and that would be better represented with
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 169

170 Chapter Four
Tab
le 1
8.T
ype
Fre
qu
ency
an
d E
ase
of
Art
icu
lati
on
of
Han
dsh
apes
in
Co
nve
rsat
ion
Dat
a
Han
dsh
apes
(h
igh
est
to
Eas
e of
art
icu
lati
on
Han
dsh
apes
(h
igh
est
toE
ase
of a
rtic
ula
tion
low
est
typ
e fr
equ
enci
es)
low
est
typ
e fr
equ
enci
es)
1.
diffi
cult
2.
easy
3.
easy
4.
easy
5.
easy
6.
easy
7.
easy
8.
diffi
cult
9.
diffi
cult
10.
easy
11.
diffi
cult
12.
easy
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:49 PM Page 170

Ease and Frequency Compared 171
13.
easy
14.
easy
15.
diffi
cult
16.
easy
17.
diffi
cult
18.
easy
19.
diffi
cult
20.
diffi
cult
21.
diffi
cult
22.
easy
23.
diffi
cult
24.
diffi
cult
25.
diffi
cult
26.
easy
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:50 PM Page 171

172 Chapter Four
Tab
le 1
8.(c
on
tin
ued
)
Han
dsh
apes
(h
igh
est
to
Eas
e of
art
icu
lati
on
Han
dsh
apes
(h
igh
est
toE
ase
of a
rtic
ula
tion
low
est
typ
e fr
equ
enci
es)
low
est
typ
e fr
equ
enci
es)
27.
diffi
cult
28.
excl
uded
29.
diffi
cult
30.
diffi
cult
31.
easy
32.
diffi
cult
33.
diffi
cult
34.
diffi
cult
35.
diffi
cult
36.
diffi
cult
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:50 PM Page 172

Ease and Frequency Compared 173
37.
easy
38.
diffi
cult
39.
excl
uded
40.
easy
41.
diffi
cult
42.
diffi
cult
43.
easy
44.
excl
uded
45.
diffi
cult
46.
diffi
cult
47.
diffi
cult
48.
excl
uded
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:50 PM Page 173
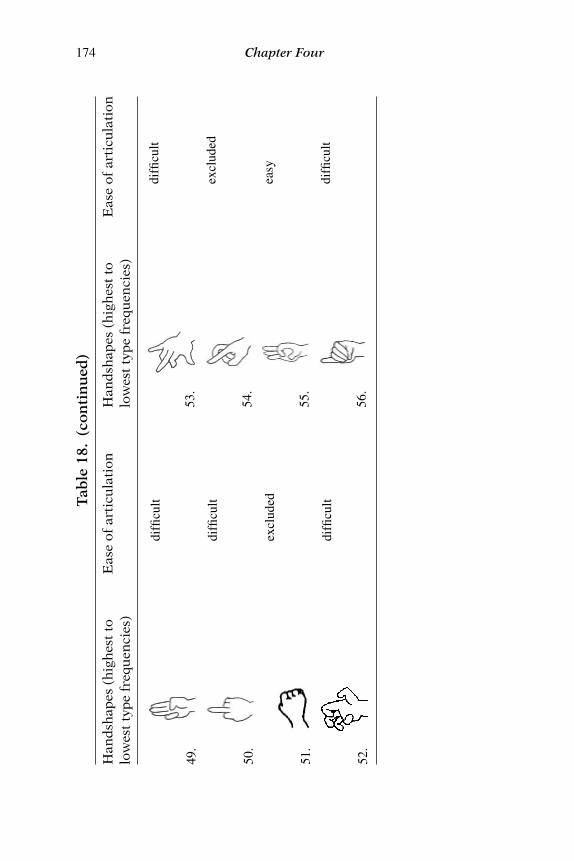
174 Chapter Four
Tab
le 1
8.(c
on
tin
ued
)
Han
dsh
apes
(h
igh
est
to
Eas
e of
art
icu
lati
on
Han
dsh
apes
(h
igh
est
toE
ase
of a
rtic
ula
tion
low
est
typ
e fr
equ
enci
es)
low
est
typ
e fr
equ
enci
es)
49.
diffi
cult
50.
diffi
cult
51.
excl
uded
52.
diffi
cult
53.
diffi
cult
54.
excl
uded
55.
easy
56.
diffi
cult
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:50 PM Page 174
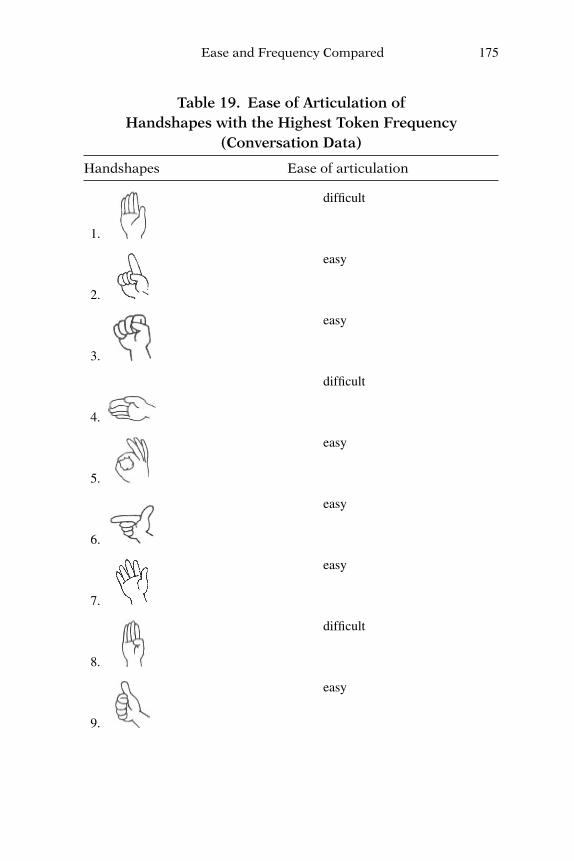
Ease and Frequency Compared 175
Table 19. Ease of Articulation of Handshapes with the Highest Token Frequency
(Conversation Data)
Handshapes Ease of articulation
1.
difficult
2.
easy
3.
easy
4.
difficult
5.
easy
6.
easy
7.
easy
8.
difficult
9.
easy
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:50 PM Page 175

176 Chapter Four
Table 19. (continued)
Handshapes Ease of articulation
10.
easy
11.
difficult
12.
easy
13.
easy
14.
easy
15.
difficult
16.
difficult
17.
easy
the unspread handshape is more important than the desire for ease. Forexample, consider the TSL sign that means house (the sign representsthe two sides of a pointed roof with the fingers on both hands unspread).Using spread handshapes for this sign might seem undesirable becausedoing so might suggest that the roof is not solid. Rather than produce asign that suggests unintended connotations, signers choose the moredifficult sign.
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:50 PM Page 176

Ease and Frequency Compared 177
Table 20. Ease of Articulation of Handshapes withModerate Token Frequency (Conversation Data)
Handshapes Ease of articulation
18.
difficult
19.
difficult
20.
easy
21.
easy
22.
easy
23.
difficult
24.
difficult
25.
difficult
26.
easy
27.
difficult
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:50 PM Page 177

178 Chapter Four
Table 20. (continued)
Handshapes Ease of articulation
28.
difficult
29.
difficult
30.
difficult
31.
excluded
32.
difficult
33.
excluded
34.
difficult
Finally, it might also be that ease can be sacrificed in handshapeswith high type and token frequency precisely because they are practicedso much by signers. (This idea is similar to the idea that frequent wordsare often the most irregular—for example, the verb to be in English.) Ithas been suggested that less frequent paradigms regularize whereasmore frequent ones do not because, using them so often, people getmore chances to keep the irregularity.24
24. I thank Jane Tsay, Jim Tai, James Myers, and the students in the graduatePhonology and Frequency class at the National Chung Cheng University (NCCU)in fall 2005 for discussion on this point.
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:50 PM Page 178

Ease and Frequency Compared 179
Table 21. Ease of Articulation of Handshapes with Lowest Token Frequency (Conversation Data)
Handshapes Ease of articulation
35.
difficult
36.
difficult
37.
difficult
38.
easy
39.
difficult
40.
easy
41.
easy
42.
easy
43.
difficult
44.
easy
45.
excluded
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:50 PM Page 179

Table 21. (continued)
Handshapes Ease of articulation
46.
difficult
47.
difficult
48.
difficult
49.
difficult
50.
difficult
51.
excluded
52.
difficult
53.
difficult
54.
excluded
55.
easy
56.
difficult
180 Chapter Four
ch04_8033_JeanAnn_Gallaudet 9/1/06 12:50 PM Page 180
Conclusion
This book explores the connection between ease of articulation and fre-quency of occurrence of handshapes in Taiwan Sign Language (TSL).Its central conclusion, based on what the evidence suggests, is that, al-though ease of articulation does not dictate frequency of occurrence, itplays a significant role in helping to explain which handshapes are usedmost frequently in TSL. The book focuses in depth on the crucial stepsthat were taken to reach this conclusion: (a) proposing an independentlymotivated theory of ease of articulation based on the physiology of thehand, (b) determining both the type frequencies and the token frequen-cies of TSL handshapes, and (c) analyzing and comparing the resultsof both investigations.
This work makes contributions in three areas. First, this work con-tributes to a better understanding of sign languages in general. Com-pared with what is known about spoken languages, very little is knownabout sign languages, and even less is known about sign languages inuse outside North America and Europe. Perhaps the most central con-tribution of this work, then, is that it adds to what is known about oneof the sign languages we know the least about.
Second, this book makes a contribution with respect to the exami-nation of frequency. Clearly, exploration by linguists and others of fre-quency effects in spoken languages is worthwhile. (As Morford andMacFarlane, 2003, point out, psycholinguistic studies that do not con-trol for frequency of the words being tested simply cannot be published.)That exploration also is expected, therefore, to be as worthwhile to re-searchers who examine the structure of sign languages. As Wilbur (1999a)
181
Concl_8033_JeanAnn_Gallaudet 8/31/06 1:49 PM Page 181
notes, what we find depends partly on where we look. Studying cor-pora of various sign languages could yield heretofore unavailable resultsthat would help a great deal in understanding the structure of sign lan-guages. Although this work examines type and token frequency effectsonly insofar as they relate to ease of articulation, the expectation is thatthese effects occur in other languages as they occur in TSL. Future workwill confirm whether these predictions are borne out.
Very few works except for those I cite in chapter 1 establish a nat-ural sign language corpus and explain generalizations made from ex-amination of the corpus. With respect to the data itself, the TSL corpusI have used is as yet, of course, too small. This limitation cannot beavoided now, but this book will likely spark interest and inspire mobi-lization of resources to establish a much larger corpus of TSL. Theprocess of data analysis involved transcribing TSL conversations andthen translating them from TSL to Chinese and English glosses. TheEnglish transcriptions were then analyzed, using Smith and Ting’s(1979, 1984) sign language manuals, to see what handshapes occur ina given sign in isolation. This process may not be the best way to ac-complish this task because the videotaped data cannot be used directly.But as technology to do this sort of work improves, better procedureswill be established. This study serves to encourage future research.
Third, this book explores an under-studied aspect of TSL: its pho-netics. Unfortunately, linguistic phenomena that fall under the phoneticdomain are sometimes characterized as unimportant. I have explainedthat, in spoken language research, this lack of interest results in somephonologists cultivating a particular disregard for phonetics, althoughthis situation is changing in many parts of the field. In sign languageresearch, this disregard has manifested somewhat differently: phoneticsand phonology are, in some sense, not separated ideologically becausephonetics, per se, has not received much attention to begin with. Thisbook takes a step in the right direction by considering how handshapes,specifically those that show up in the inventory of TSL, are produced. Itis not concerned with the phonological processes that members of theinventory may undergo. It does not examine the behavior of handshapes,
182 Conclusion
Concl_8033_JeanAnn_Gallaudet 8/31/06 1:49 PM Page 182

for example, in strings or in individual signs. It does not propose anyrules that relate one form of a handshape to another. It does not discusshandshape variants. Thus, I consider it an example of phonetic research.
Using a phonetic approach, this book explores the idea of articula-tion and claims that we can establish which handshapes are moreeffortful to produce. Perhaps the central problem with ease of articula-tion is that it is not often used in a rigorous manner. My work providesa testable, explicit model of ease of articulation of handshapes. Thismodel allows us to characterize ease of articulation in handshapes rig-orously. At the very least, then, we can potentially eliminate the circu-lar thinking that associates ease of articulation with other properties oflanguage, for example, “easy equals frequent and frequent equals easy,”or “easy equals acquired first and acquired first equals easy.”
DIRECTIONS FOR FUTURE RESEARCH
Future research stemming from this work could take three directions.The first, most obvious direction to take is to make sure that this workis extended to all handshapes in TSL and to all other handshapes in allother sign languages. In this work, I consider only the one- and two-group handshapes that are attested in TSL; therefore, a few TSL hand-shapes were excluded from consideration. Eventually, these should beconsidered. Future researchers will need to uncover a mechanism withwhich to decide the difficulty or ease of these handshapes. Likewise,corpora of conversational data should be collected and studied in everysign language. Type and token frequencies should be established forhandshapes and for other aspects of signs.
The second direction for future research is related to phonetics. Theliterature review in chapter 1 makes clear that we need to know moreabout sign language phonetics. A start in experimental sign phoneticshas already been made in works such as Wilcox (1992), Wilbur (1990,1992), and Poizner, Klima, Bellugi, and Livingston (1986) in the sensethat various technologies have been used to answer questions about pro-duction and perception. At this point, these results have little to do with
Conclusion 183
Concl_8033_JeanAnn_Gallaudet 8/31/06 1:49 PM Page 183

the questions I address here, but our community of researchers shouldthink about how the kinematics, perception, and articulation of hand-shapes go together. In addition, psycholinguistic studies that seek toestablish whether there are frequency effects and “ease” effects, as wellas whether they can be teased apart, would be helpful.
At this stage, it seems unlikely that this study can make a direct con-tribution to the work in spoken language phonetics that seeks to char-acterize ease of articulation. However, if more attention to handshapephonetics proves fruitful in future research, then the methods and theo-ries of phonetic work in sign languages will advance. As this progressoccurs, sign language phonetics could well provide new insights forspoken language phonetics. The modality difference between signedand spoken languages may make study of phonetic properties of a signmore accessible than it is in spoken languages. Even if the importantdiscoveries about the phonetics of sign languages can be made only byexamining underlying physical structures of the hand, experimentalwork may still be easier to do on the hands and forearm than in the vo-cal tract. The lack of explicit information about handshape phonetics un-til this point has made it impossible to advance and support a model ofease of articulation—hence, the need for this book.
My model is a first step in this direction. Generally, I claim that theaspects of the physiology that are important for handshape are (a) howthe fingers group together in flexion and extension, (b) what fingers doin combination and alone, and (c) what configuration the fingers assume.But the specific details of my proposal must be challenged. For example,the physiological criteria I have isolated here might not be the correctones. Future research in this area may show that one or more of thesefactors is not the most important for ease and that other factors should beconsidered, which would support changing the criteria used to evaluateease. I considered only the carpometacarpal joint (the joint that connectsthe hand to the wrist) and joints distal to that. Future work might takeinto consideration the other two wrist joints—the midcarpal joint (whichconnects the distal and proximal rows of wrist bones to each other) andthe radiocarpal joint (which connects the wrist to the forearm)—to see
184 Conclusion
Concl_8033_JeanAnn_Gallaudet 8/31/06 1:49 PM Page 184
whether these play a role in ease of articulation of handshapes. Further,joints proximal to the wrist also could be of interest to sign languageresearchers, as Crasborn’s (1995) work on orientation suggests. Finally,the neurology relevant to the human hand, a criterion I excluded in thiswork, should eventually be taken into consideration.
Moreover, additional motivation for all criteria remains to be un-covered. For example, are there experimental methods to measure howmuch opposition exists in a given configuration? If there are and if theyshow that the configurations really can be ranked in terms of ease, thenwe could more confidently use the MOC criteria. The effects of all thecriteria also need to be experimentally verified.
The model I have proposed makes clear claims about the physio-logical effect of various anatomical structures in the hand. Because thephonetics of sign languages will likely include analysis of hand andforearm movements, linguists and kinesiologists would do well toexamine some of these issues together. In particular, two hypothesesshould be examined with respect to the juncturae tendinum. First, ex-periments should be conducted to determine whether my proposed junc-turae tendinum effects (that the index and pinky fingers are freer thanthe middle and ring fingers and that between the middle and ring, thering is the least free) occur for large numbers of people and whetherthese effects should in fact be attributed to the juncturae tendinum.
Perhaps somewhat easier to test are claims that certain muscles areused in the articulation of particular handshapes. These claims mightbe verifiable by methods introduced in sources such as Basmajian(1978) and Kendall, McCreary, and Kendall (1983) from the physio-logical literature. I also make claims about whether the use of thesemuscles makes the handshapes easy or difficult. Testing these claims, ofcourse, depends on what the definition of ease is as well as whetherand how it can be tested. The agility of the radial compared with theulnar fingers also might be tested.
In addition, further testing and research could be conducted with re-spect to the actual mechanics of the model (i.e., the way the physiologi-cal criteria are expressed by the algorithms). For example, the algorithms
Conclusion 185
Concl_8033_JeanAnn_Gallaudet 8/31/06 1:49 PM Page 185

that I have used here to calculate the ease scores might not be correct. AsI acknowledge in chapter 3, other possible algorithms might be used toarrive at an ease score. Reasons to choose one over another might beestablished with further research in this area. Also, the numerical valuesthat I have assigned to the criteria may be incorrect. Perhaps scoresshould be based on more than a yes or no and, consequently, a 1 or 0 dis-tinction, as in this system. The criteria may need to be weighted differ-ently than in this study where the MOC criterion counted more than oth-ers. Finally, the cutoffs that I have chosen might be incorrect; perhapsmore handshapes than just those with essentially nothing difficult aboutthem (i.e., the handshapes with scores of 0) should be considered easy.With more work in this area, motivation to choose different cutoff pointsmay be uncovered.
Finally, the third direction for future research involves phonology.Although this study is concerned with phonetics, it also stands to con-tribute to our understanding of sign language phonology. One of myattempts here is to disentangle (at least in principle) phonetics andphonology and to give a place to phonetics in its own right. This task isimportant because how we do what we do has effects for persistentquestions that sign language researchers are facing, for example, what isphonetics and what is phonology in sign languages? Many researchershave noticed and commented (anecdotally and in their writing) on thefact that the boundary between the phonology and the phonetics of signlanguages is hazy (see, e.g., Gee 1993; Brentari 1998). Of course, as inspoken languages, phonetics and phonology interact very closely in signlanguages, and this fact explains some of the inability to consider themseparately. Nevertheless, the haziness persists in sign language research,and it needs to be clarified.
In an attempt to understand more about the difference betweenphonology and phonetics in sign languages, I tried to focus on explicat-ing what the formal and functional approaches take to be the importantquestions and ways to answer them. But as revealing as doing so canbe, it is not always easy to decide what perspective a piece of work takes.Bybee (1999) writes that her work has been characterized as both func-
186 Conclusion
Concl_8033_JeanAnn_Gallaudet 8/31/06 1:49 PM Page 186

tionalist and antifunctionalist. It appears that this ambiguity will occur aswe talk about sign language research. As an example, consider Mandel’s(1979) claim that the physiological fact of tenodesis causes signs withpath movement and opening handshape change to move in the directionaway from the signer and that similar signs with closing handshapechange to move toward the signer. Mandel’s problem—What handshapechanges occur with what direction of path movement?—leaves him try-ing to discover what goes with what. Finding answers to this questionis one of the ways that formal linguists make sense of data. But Mandel’sstrategy to solve the problem—an appeal to anatomic constraints—issomething functional linguists would be more likely to adopt. From thisexample alone, it should be clear that the interpretation of exactly whatour questions and results mean will likely be complicated. In this book,I dichotomize formalism and functionalism to try and understand eachseparately. In so doing, I likely made some things clearer as I made otherthings more cloudy. Still, discussing our perspectives as linguists andhow those perspectives affect our questions as well as our methods tofind answers for them would push us forward in our quest to understandnot only sign languages but also language in general.
The question of what is phonetic and what is phonological in signlanguages is an important one. What we learn about articulation ofhandshapes can potentially reduce the number of handshape phenomenathat phonology has to explain. We can examine the question of whichlinguistic phenomena must be explained by reference to mental repre-sentations and which may be explained by aspects of the “real world”(e.g., constraints of the articulators of sign languages, perceptual re-quirements). Questions remain: Will further study of handshape andsign phonetics answer our questions? What will the phonetics fail toexplain? Will a particular phenomenon that phonetics fails to explainbe a candidate for a phonological explanation? Handshape phonologyand phonetics provide an opportunity to examine these questions.
Classical definitions hold that phonetics seeks to explain the physi-cal properties of sounds whereas phonology is concerned both with ex-plaining the behavior of the sounds in sound sequences and the mental
Conclusion 187
Concl_8033_JeanAnn_Gallaudet 8/31/06 1:49 PM Page 187

representation of sounds. Thus, we expect that handshapes have acanonical, physical, or citation form (with which this research is largelyconcerned), and that handshapes may assume various other forms whenthey are acted on by phonology. These enterprises are clearly related,and there is a movement to bring evidence from each to bear on theother (Ohala and Jaeger 1986; Kingston and Beckman 1990; Ohala1974, 1990, and other citations in chapter 1).
Although this book is not directly concerned with phonology, it hasimplications for phonological theories that are responsive to the pho-netics. I have shown that the physiology of the hand, wrist, and fore-arm is partially responsible for the handshape inventories and patternsdiscussed in this work. The question remains as to whether or not thephysiological reasons behind these phenomena should be encoded in thegrammar. Consider the case of physically impossible handshapes. Ifphysiological information ought to be encoded in the grammar, thenthere are several ways this encoding might be achieved.
First, consider a physically impossible handshape in which the ringfinger is extended with the rest of the fingers closed. We might advocatethe construction of a feature theory for handshapes that prevents com-binations such as [extended] and [ring] from occurring because thesetwo features can never combine when the ring finger acts alone andthe rest of the fingers are closed. A theory such as this one might place[extended] and [ring] in a feature geometry in a way that makes theircombination impossible. In this type of scenario, the physiological factthat it is impossible to extend the ring finger when it acts alone would becaptured by the formal feature theory that disallowed the combination.
A second possibility, which is similar to the first that encodes physi-ological constraints in the grammar, is one that uses feature co-occurrenceconstraints that are based on the phonetics. Grounding theory (Archangeliand Pulleyblank 1994) is such a system. It allows features to combinesubject to phonetic constraints. For the handshape discussed above, a con-straint such as *[extended] [ring] might be used in this type of system.Again, the formal system of constraints on combinations encodes thefact that the ring cannot extend when the other fingers are closed.
188 Conclusion
Concl_8033_JeanAnn_Gallaudet 8/31/06 1:49 PM Page 188

Optimality theory (Prince and Smolensky 1993) is a phonologicaltheory of ranked constraints as opposed to rules. The rankings of theconstraints differ from language to language, and the constraints them-selves are violable. Constraints interact within each language in differ-ent ways to derive outputs. Violations of highly ranked constraints arecostly. Phonological representations are arrived at by the way the con-straints interact with one another. Optimality theory is widely regardedas a theory of markedness (Boersma, Dekkers, and van de Weijer 2000).Interested readers can find a much more detailed explanation in Princeand Smolensky (1993). Within the framework of optimality theory, per-haps a feature combination such as [extended] [ring] could be rankedas very high or excluded altogether.
But also relevant here is the issue of where the constraints comefrom. Researchers have discussed the attempt within optimality theoryto constrain the set of constraints with “independently motivated, func-tionally based principles, such as those notions of phonetic optimality(informally) appealed to by Natural Phonology and other functionallyoriented traditions of linguistic analysis” (Kirchner 2001, 19). Opti-mality theory accounts of sign language phenomena are not plentiful(see Brentari 1998; Ann and Peng 2000). Ann and Peng (2000) at-tempted to base the constraints directly on the physiology. The workpresented here should be very helpful to accounts of handshape phe-nomena made from the perspective of optimality theory.
There is justification to assert that physiological information neednot be encoded in the grammar. Consider, for example, that the grammarencodes only those aspects of the language that cannot be predictedfrom anything else. Because physical impossibility can be explained inthe “real world” through physiology, information about physically im-possible handshapes would not need to be encoded in the grammar. Thatis, any handshape that is physically impossible would not be produced,not because it was prevented from doing so by a feature geometry or atheory of constraints, but rather, because such a handshape would simplynot be possible. The physiology itself, not a formal theory, is the expla-nation for why the handshape does not occur.
Conclusion 189
Concl_8033_JeanAnn_Gallaudet 8/31/06 1:49 PM Page 189

This book does not provide any evidence that enables us to choosebetween these competing ideas. Whatever view of phonology is adopted,however, this work can be drawn on for phonetic evidence for claimsabout handshape features, feature geometries, and feature combinations.
For a long time, many linguists did not consider the ideas of artic-ulation (and ease of articulation) and frequency to be very important.But this perspective is changing. Phonologists and phoneticians whowork on spoken languages are bringing together different methods andtechniques as well as theoretical understandings (Hayes, Kirchner, andSteriade 2004) to understand the sound systems in spoken languages. Itseems clear that researchers should make the same sorts of efforts instudying sign languages and should begin to understand more about theirarticulatory, acoustic (kinematic), and perceptual properties. Finally, it isindisputable that frequency has important effects in virtually all areasof spoken languages. It is time to consider that this possibility also existsin sign languages as well. Natural language corpora must be developed,and generalizations from these corpora must be explained. And as wework, we ought to be aware enough of our approaches as linguists toovertly discuss them, so they can be challenged and so our results can beunderstood clearly in the context from which they emerged.
190 Conclusion
Concl_8033_JeanAnn_Gallaudet 8/31/06 1:49 PM Page 190

References
Abraham A. S., and L. Lisker. 1970. Discriminability along the voicing con-
tinuum: Cross language tests. In Proceedings of the Sixth International
Congress of Phonetic Science, 569–73. Prague: Academia.
Anderson, S. 1981. Why phonology isn’t “natural.” Linguistic Inquiry 12
(4):493–539.
———. 1985. Phonology in the twentieth century. Chicago: Chicago Univer-
sity Press.
Ann, J. 1992a. Physiological constraints in Taiwan Sign Language handshape-
change. Nordic Journal of Linguistics 15 (2):143–57.
———. 1992b. Physiological constraints on two-finger handshapes. In Papers
from the twenty-eighth regional meeting of the Chicago Linguistic Society,
ed. C. P. Canakis, G. P. Chan, and J. Marshall Denton, 1–11.
———. 1993a. A linguistic investigation of physiology and handshape. Ph.D.
diss., Dept. of Linguistics, University of Arizona, Tucson.
———. 1993b. Review of the phonetics of fingerspelling by Sherman Wilcox.
Language and Speech 36 (4):471–75.
———. 1996. On the relation between the difficulty and the frequency of
occurrence of handshapes in two sign languages. Lingua 98: 19–41.
———. 2005. A functional explanation of Taiwan Sign Language handshape
frequency. Language and Linguistics 6 (2):217–45.
Ann, J., and B. L. Peng. 2000. Optimality theory and opposed handshapes in
Taiwan Sign Language. University of Rochester Working Papers in the
Language Sciences 1 (2):173–94.
191
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 191

Archangeli, D., and D. Pulleyblank. 1994. Grounded phonology. Cambridge,
MA: MIT Press.
Baker, S. 2003. The perception of handshapes in American Sign Language.
Ph.D. diss., Dept. of Linguistics, University of Delaware, Newark.
Basmajian, J. V. 1978. Muscles alive! Their functions revealed by electromyo-
graphy. Baltimore: Williams and Wilkins.
Battison, R. 1974. Phonological deletion in American Sign Language. Sign
Language Studies 5: 1–19.
———. 1978. Lexical borrowing in American Sign Language. Silver Spring,
MD: Linstok Press.
Boersma, P. 1998. Functional phonology: Formalizing the interactions be-
tween articulatory and perceptual drives. Amsterdam: Netherlands Grad-
uate School of Linguistics.
Boersma, P., J. Dekkers, and J. van der Weijer. 2000. Introduction to Opti-
mality theory: Phonology, syntax and acquisition, ed. J. Dekkers, F. van
der Leeuw, and J. van der Weijer. New York: Oxford University Press.
Bonvillian, J. D., and T. Siedlecki Jr. 2000. Young children’s acquisition of the
formational aspects of American Sign Language. Sign Language Studies 1
(1):45–64.
Boyes-Braem, P. 1973. The acquisition of the dez (handshape) in American
Sign Language: A preliminary analysis. Salk Working Paper., Salk Insti-
tute, La Jolla, CA.
———. 1981. Features of the handshape in American Sign Language. Ph.D.
diss., Dept. of Psychology, University of California at Berkeley.
———. 1990. Acquisition of the handshape in American Sign Language: A
preliminary analysis. In From gesture to language in hearing and deaf
children, ed. V. Volterra and C. Erting, 107–27. Springer Series in Lan-
guage and Communication 27. Berlin: Springer-Verlag.
Brand, P. W. 1985. Clinical mechanics of the hand. St. Louis, MO: Mosby.
Brentari, D. 1988. Partial predictability in ASL handshape change. Paper pre-
sented at the Theoretical Issues in Sign Language Research Conference
(TISLR), Gallaudet University, Washington DC.
———. 1990. Theoretical foundations of American Sign Language phonology.
Ph.D. diss., Dept. of Linguistics, University of Chicago.
192 References
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 192
———. 1998. A prosodic model of sign language phonology. Cambridge MA:
MIT Press.
Brentari, D., H. van der Hulst, E. van der Kooij, and W. Sandler. 1996. One
over all and all over one: A model for the phonological representation of
handshape. Paper presented at the Fifth International Conference on
Theoretical Issues in Sign Language Research, University of Québec and
McGill University, September, Montreal, QC, Canada.
Browman, C. P., and L. M. Goldstein. 1985. Dynamic modeling of phonetic
structure. In Phonetic linguistics: Essays in honor of Peter Ladefoged,
ed. V. Fromkin, 35–53. Orlando, FL: Academic Press.
———. 1986. Towards an articulatory phonology. Phonology Yearbook 3:
219–52.
———. 1990a. Gestural specification using dynamically-defined articulatory
structures. Journal of Phonetics 18: 299–320.
———. 1990b. Representation and reality: Physical systems and phonologi-
cal structure. Journal of Phonetics 18: 411–24.
———. 1990c. Tiers in articulatory phonology with some implications for
casual speech. In Papers in laboratory phonology: Between the grammar
and the physics of speech, ed. J. Kingston and M. Beckman, 341–76. Cam-
bridge: Cambridge University Press.
———. 1992. Articulatory phonology: An overview. Phonetica 49: 155–
80.
———. 1995. Gestural syllable position effects in American English. In Pro-
ducing speech: Contemporary issues for Katherine Safford Harris, ed.
F. Bell-Berti and L. J. Raphael, 19–34. Woodbury, NY: American Institute
of Physics.
Bybee, J. L. 1999. Usage-based phonology. In Functionalism and formalism in
linguistics. Vol. 1, General papers, ed. M. Darnell, E. Moravcsik,
F. Newmeyer, M. Noonan, and K. Wheatley, 211–42. Philadelphia: John
Benjamins.
———. 2000. The phonology of the lexicon: Evidence from lexical diffusion.
In Usage-based models of language, ed. M. Barlow and S. Kemmer, 65–
85. Stanford, CA: Center for the Study of Language and Information
(CSLI) Publications.
References 193
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 193
———. 2001a. Frequency effects on French liaison. In Frequency and the
emergence of linguistic structure, ed. J. Bybee and P. Hopper, 211–42.
Philadelphia: John Benjamins.
———. 2001b. Phonology and language use. New York: Cambridge Univer-
sity Press.
Bybee, J., and P. Hopper, ed. 2001. Frequency and the emergence of linguis-
tic structure. Philadelphia: John Benjamins.
Chang, J., S. Su, and J. H-Y Tai. 2005. Classifier predicates reanalyzed, with
special reference to Taiwan Sign Language. Language and Linguistics
6 (2):247–78.
Cheek, D. A. 2001. The phonetics and phonology of handshape in American
Sign Language. Ph.D. diss., Dept. of Linguistics, University of Texas at
Austin.
Chomsky, N. 1965. Aspects of the theory of syntax. Cambridge, MA: MIT
Press.
Chomsky, N., and M. Halle. 1968. Sound pattern of English. Cambridge, MA:
MIT Press.
Corina, D. 1990. Reassessing the role of sonority in syllable structure: Evi-
dence from a visual gestural language. In Papers from the twenty-sixth
regional meeting of the Chicago Linguistics Society. Vol. 2, The parases-
sion on the syllable in phonetics and phonology, ed. M. Ziolkowski,
M. Noske, and K. Deaton, 33–44. Chicago: Chicago Linguistics Society.
Corina, D., and E. Sagey. 1988. Predictability in ASL handshapes with impli-
cations for feature geometry. San Diego, CA: Salk Institute and University
of California at San Diego.
———. 1989. Are phonological hierarchies universal? Evidence from Ameri-
can Sign Language. In Proceedings of the Sixth Eastern States Conference
on Linguistics (ESCOL), ed. K. DeJong and Y. No, 73–83. Columbus, OH:
Ohio State University Press.
Crasborn, O. 1995. Articulatory symmetry in two-handed signs. MA thesis,
Department of Linguistics, University of Nijmegen, The Netherlands.
Darnell, M., E. Moravcsik, F. Newmeyer, M. Noonan, and K. Wheatley, ed.
1999. Functionalism and formalism in linguistics. Vol. 1, General papers.
Philadelphia: John Benjamins.
De Saussure, F. 1916. Cours de linguistique général. Paris: Payot.
194 References
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 194

Donegan, P. 1985. On the natural phonology of vowels. Outstanding Disserta-
tions in Linguistics Series. New York: Garland.
Dressler, W. U., and M. Ladányi. 2000. Productivity in word formation (WF):
A morphological approach. Acta Linguistica Hungarica 47 (1–4):103–44.
Ellis, N. C. 2002. Frequency effects in language processing: A review with im-
plications for theories of implicit and explicit language acquisition. Stud-
ies in Second Language Acquisition 24 (2):143–88.
Fahrer, M. 1981. Interdependent and independent actions of the fingers. In
The hand, ed. R. Tubiana, 399–403. Philadelphia: Saunders.
Francis, W. N., and H. Kucera. 1982. Frequency analysis of English usage.
Boston, MA: Houghton Mifflin.
Galley, P. M., and A. L. Forster. 1987. Human movement: An introductory
text for physiotherapy students. New York: Churchill Livingstone.
Gay, T., B. Lindblom, and J. Lubker. 1981. Production of bite-block vowels:
Acoustic equivalence by selective compensation. Journal of the Acousti-
cal Society of America 69 (3):802–10.
Gee, J. 1993. Reflections on the nature of ASL and the development of ASL
linguistics: Comments on Corina’s article. In Phonetics and phonology.
Vol. 3, Current issues in ASL phonology, ed. G. Coulter, 97–101. San
Diego, CA: Academic Press.
Halverson, H. M. 1937. Studies on the grasping response of early infancy.
Journal of Genetic Psychology 51: 393–424.
Hare, M. L., M. Ford, and W. D. Marslen-Wilson. 2001. Frequency effects and
the representation of regular verbs. In Frequency and the emergence of
linguistic structure, ed. J. Bybee and P. Hopper, 181–200. Amsterdam:
John Benjamins.
Haspelmath, M. 2000. Why can’t we talk to each other? Lingua 110: 235–55.
Hayes, B. P. 1999. Phonetically driven phonology: The role of optimality
theory and inductive grounding. In Functionalism and formalism in lin-
guistics. Vol. 1, General papers, ed. M. Darnell, E. Moravcsik, F.
Newmeyer, M. Noonan, and K. Wheatley, 243–85. Philadelphia: John
Benjamins.
———. 2001. Gradient well-formedness in optimality theory. In Optimality
theory phonology, syntax, and acquisition, ed. J. Dekkers, F. van der
Leeuw, and J. van de Weijer, 88–120. Oxford: Oxford University Press.
References 195
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 195

Hayes, B., R. Kirchner, and D. Steriade, ed. 2004. Phonetically based phonol-
ogy. New York: Cambridge University Press.
Hentschel, G., and T. Mendel. 2002. Marker productivity, structural prefer-
ences and frequency: Observations about morphological change in
Slavonic. Indogermanische Forschungen 107: 1–46.
Hulst, H. van der. 1995. The composition of handshapes. Trondheim Working
Papers 23:1–17.
Jakobson, R. 1968. Child language, aphasia and phonological universals. The
Hague: Mouton.
Jakobson, R., G. Fant, and M. Halle. 1951/1972. Preliminaries to speech
analysis. Repr. Cambridge, MA: MIT Press.
Keating, P. 1996. The phonetics-phonology interface. University of Califor-
nia Working Papers in Phonetics 92: 45–60.
Kegl, J., and R. Wilbur. 1976. When does structure stop and style begin? Syn-
tax, morphology and phonology vs. stylistic variation in ASL. In Papers
from the 12th Regional Meeting, Chicago Linguistic Society, April 23–25,
ed. S. S. Mufwene, S. Steever, and C. Walker, 24–32. Chicago: Chicago
Linguistics Society.
Kemmer, S., and M. Barlow. 2000. Introduction: A usage-based conception
of language. In Usage-based models of language, ed. M. Barlow and
S. Kemmer, vii–xxvii. Stanford, CA: Center for the Study of Language
and Information (CSLI) Publications.
Kendall, F. P., E. K. McCreary, and H. O. Kendall. 1983. Muscles, testing and
function. Baltimore: Williams and Wilkins.
Kingston, J., and M. Beckman, ed. 1990. Papers in laboratory phonology:
Between the grammar and the physics of speech. New York: Cambridge
University Press.
Kirchner, R. 2001. An effort based approach to consonant lenition. Outstand-
ing Dissertations in Linguistics Series. New York: Routledge.
Klima, E., and U. Bellugi. 1979. The signs of language. Cambridge, MA: Har-
vard University Press.
Labov, W. 1994. Principles of linguistic change. Vol. 1, Internal factors. Lan-
guage in Society Series 20. Oxford: Blackwell.
Ladefoged, P. 1984. A course in phonetics. San Diego, CA: Harcourt, Brace
Jovanovich.
196 References
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 196

———. 1990. Some reflections on the IPA. Journal of Phonetics 18:
335–46.
Lane, H., P. Boyes-Braem, and U. Bellugi. 1976. Preliminaries to a distinc-
tive feature analysis of handshapes in American Sign Language. Cognitive
Psychology 8: 263–89.
Liddell, S., and R. E. Johnson. 1986. American Sign Language compound for-
mation processes, lexicalization and phonological remnants. Natural Lan-
guage and Linguistic Theory 4: 445–513.
———. 1989. American Sign Language: The phonological base. Sign Lan-
guage Studies 64: 195–277.
Lindblom, B. 1983. The economy of speech gestures. In The production of
speech, ed. P. F. MacNeilage, 217–45. New York: Springer Verlag.
———. 1990. On the notion of “possible speech sound.” Journal of Phonet-
ics 18: 135–52.
———. 1992. Phonological units as adaptive emergents of lexical develop-
ment. In Phonological development: Models, research, implications, ed.
C. Ferguson, L. Menn, and C. Stoel-Gammon, 131–63. Timonium, MD:
York Press.
———. 1998. Systematic constraints and adaptive change in the formation of
sound structure. In Approaches to the evolution of language, ed. J. Hur-
ford, M. Studdert-Kennedy, and C. Knight, 242–64. New York: Cambridge
University Press.
———. 2000. Developmental origins of adult phonology: The interplay be-
tween phonetic emergents and the evolutionary adaptations of sound pat-
terns. Phonetica 57 (2–4):297–314.
Lindblom, B., and I. Maddieson. 1988. Phonetic universals in consonant sys-
tems. In Language, speech, and mind, ed. L. Hyman and C. Li, 62–78.
New York: Routledge.
Lindblom, B., and J. Sundberg. 1971. Acoustic consequences of lip, tongue,
jaw and larynx movement. Journal of the Acoustical Society of America
50: 1166–79.
Locke, J. L. 1983. Phonological acquisition and change. New York: Academic
Press.
———. 1993. The child’s path to spoken language. Cambridge, MA: Harvard
University Press.
References 197
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 197

Loncke, F. 1984. On the interface between sign phonology and kinesiology.
In Recent research on European sign languages, ed. F. Loncke, P. Boyes-
Braem, and Y. Lebrun, 129–36. Lisse, The Netherlands: Swets and
Zeitlinger.
Lupton, L., and H. Zelaznik. 1990. Motor learning in sign language students.
Sign Language Studies 67: 153–74.
MacConaill, M. A., and J. V. Basmajian. 1969. Muscles and movements: A
basis for human kinesiology. Baltimore: Williams and Wilkins.
Maddieson, I. 1984. Patterns of sounds. Cambridge: Cambridge University
Press.
———. 1998. Why make life hard? Resolutions to problems of rare and diffi-
cult sound types. Paper presented at the Annual Meeting of the Berkeley
Linguistics Society, February, Berkeley, CA.
Mandel, M. A. 1979. Natural constraints in sign language phonology: Data
from anatomy. Sign Language Studies 24: 215–29.
———. 1981. Phonotactics and morphophonology in ASL. Ph.D. diss.,
Department of Linguistics, University of California, Berkeley.
———. 1982. Point of contact in the basehand of type 3 signs of American
Sign Language. Working paper, Northeastern University, Boston.
Mathur, G., and C. Rathmann. 2000. Why not GIVE-US: An articulatory con-
straint in signed languages. In Current trends in international sign lan-
guage research, ed. V. Dively, M. Metzger, S. Taub, and A. Baer, 1–26.
Washington DC: Gallaudet University Press.
McIntire, M. 1977. The acquisition of American Sign Language hand config-
urations. Sign Language Studies 16: 247–66.
Meier, R. P., C. Mauk, G. R. Mirus, and K. Conlin. 1998. Motoric constraints
on early sign acquisition. In Proceedings of the twenty-ninth annual Child
Language Research Forum, ed. E. V. Clark, 63–72. San Jose, CA: Stan-
ford University.
Miller G. A., and P. E. Nicely. 1955. An analysis of perceptual confusions
among some English consonants. Journal of the Acoustical Society of
America 27: 339–52.
Miyawaki, K., W. Strange, R. R. Verbrugge, A. M. Liberman, J. J. Jenkins, and
O. Fujimura. 1975. An effect of linguistic experience: The discrimination
198 References
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 198

of [r] and [l] by native speakers of Japanese and English. Perception and
Psychophysics 18: 331–40.
Morford, J. P. and J. MacFarlane. 2003. Frequency characteristics of American
Sign Language. Sign Language Studies 3 (2):213–225.
Moy, A. 1990. A psycholinguistic approach to categorizing handshapes in
American Sign Language: Is [As] an allophone of /A/? In Sign language
research: Theoretical issues, ed. C. Lucas, 346–57. Washington, DC:
Gallaudet University Press.
Myers, J., H. Lee, and J. Tsay. 2005. Phonological production in Taiwan Sign
Language. Language and Linguistics 6 (2):310–60.
Myers, S, 1997. Expressing phonetic naturalness in phonology. In Derivations
and constraints in phonology, ed. I. Roca, 125–52. New York: Oxford
University Press.
Napier, J. 1980. Hands. New York: Pantheon Books.
Nathan, G. S. 1982. Natural phonology interference in second language ac-
quisition. In The uses of phonology, ed. G. S. Nathan and M. Winters, 103–
13. Carbondale: Southern Illinois University.
———. 1994. How the phoneme inventory gets its shape: Cognitive gram-
mar’s view of phonological systems. Rivista di Linguistica 6 (2):275–87.
Nelson, W. L., J. S. Perkell, and J. R. Westbury. 1984. Mandible movements
during increasingly rapid articulations of single syllables: Preliminary ob-
servations. Journal of the Acoustical Society of America 75: 945–51.
Newmeyer, F. J. 1998. Language form and language function. Cambridge MA:
MIT Press.
Ohala, J. J. 1974. Phonetic explanation in phonology. In Papers from the
parasession on natural phonology, ed. A. Bruck, R. A. Fox, M. W. La
Galy, 251–74. Chicago: Chicago Linguistics Society.
———. 1975. Phonetic explanations for nasal sound patterns. In Nasalfest:
Papers from a Symposium on Nasals and Nasalization, ed. C. A. Fergu-
son, L. M. Hyman, and J. J. Ohala, 289–316. Stanford, CA: Language Uni-
versals Project.
———. 1981. The listener as a source of sound change. In Papers from the
parasession on language and behavior, ed. C. S. Masek, R. A. Hendrick,
and M. F. Miller, 178–203. Chicago: Chicago Linguistics Society.
References 199
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 199

———. 1983. The origin of sound patterns in vocal tract constraints. In The
production of speech, ed. P. F. MacNeilage, 189–216.
———. 1990. There is no interface between phonology and phonetics: A
personal view. Journal of Phonetics 18: 153–71.
———. 1992. What’s cognitive, what’s not in sound change. Lingua e Stile
27 (3):321–62.
———. 1993. Sound change as nature’s speech perception experiment. Speech
Communication 13: 155–61.
Ohala, J., and J. J. Jaeger, ed. 1986. Experimental phonology. Orlando, FL:
Academic Press.
Öhman, S. E. G. 1966. Perception of segments of VCCV utterances. Journal of
the Acoustical Society of America 40: 979–88.
Padden, C. A., and D. Perlmutter. 1987. American Sign Language and the
architecture of phonological theory. Natural Language and Linguistic
Theory 5: 335–75.
Passy P. 1891. Etude sur les changements phonetiques et leurs caracteres
generaux. Paris: Librairie Firmin-Didot.
Perlmutter, D. 1992. Sonority and syllable structure in American Sign Lan-
guage. Linguistic Inquiry 23 (3):407–42.
Phillips, B. S. 2001. Lexical diffusion, lexical frequency and lexical analysis.
In Frequency and the emergence of linguistic structure, ed. J. Bybee and
P. Hopper, 123–36. Amsterdam: John Benjamins.
Pierrehumbert, J. 1990. Phonological and phonetic representation. Journal of
Phonetics 18: 375–94.
———. 1999a. Formalizing functionalism. In Functionalism and formalism in
linguistics. Vol. 1, General papers, ed. M. Darnell, E. Moravcsik,
F. Newmeyer, M. Noonan, and K. Wheatley, 287–304. Philadelphia: John
Benjamins.
———. 1999b. What people know about sounds of language. Studies in the
Linguistic Sciences 29 (2):111–20.
———. 2001. Exemplar dynamics: Word frequency, lenition and contrast. In
Frequency and the emergence of linguistic structure, ed. J. Bybee and
P. Hopper, 137–57. Amsterdam: John Benjamins.
Pierrehumbert, J., M. Beckman, and D. R. Ladd. 1996. Laboratory phonol-
ogy. In Current trends in phonology: Models and methods, ed. J. Du-
200 References
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 200

rand and B. Laks, 535–48. Salford, UK: European Studies Research
Institute.
Poizner, H. 1983. Perception of movement in American Sign Language: Ef-
fects of linguistic structure and linguistic experience. Perceptions and Psy-
chophysics 33(3): 215–31.
Poizner, H., E. Klima, and U. Bellugi. 1987. What the hands reveal about the
brain. Cambridge, MA.: MIT Press.
Poizner, H., U. Bellugi, and V. Lutes-Driscoll. 1981. Perception of American
Sign Language in dynamic point-light displays. Journal of Experimental
Psychology: Human Perception and Performance 7(2): 430–40.
Poizner, H., E. S. Klima, U. Bellugi, and R. B. Livingston. 1986. Motion analy-
sis of grammatical processes in a visual-gestural language. In Motion:
Representation and perception, ed. N. I. Badler and J. K. Tsotsos. New
York: North-Holland.
Prince, A., and P. Smolensky. 1993. Optimality theory: Constraint interaction
in generative grammar. Working paper, Rutgers University, New
Brunswick, NJ, and University of Colorado at Boulder.
———. 1997. Optimality: From neural networks to universal grammar. Science
275: 1604–10.
Romanes, G. J. (ed.). 1981. Cunningham’s textbook of anatomy. New York:
Oxford University Press.
Sandler, W. 1989. Phonological representation of the sign: Linearity and non-
linearity in American Sign Language. Dordrecht, Holland: Foris.
———. 1993. Sign language handshapes and markedness. Working paper,
University of Haifa, Israel.
———. 1996. Representing handshapes. International Review of Sign Lin-
guistics 1: 115–58.
Schane, S. 1973. Generative phonology. Englewood Cliffs, NJ: Prentice Hall.
Schenck, R. R. 1964. Variations of the extensor tendons of the fingers. Jour-
nal of Bone and Joint Surgery 46-A (1):103–10.
Siedlecki, T., Jr., and J. D. Bonvillian. 1993. Location, handshape and move-
ment: Young children’s acquisition of the formational aspects of American
Sign Language. Sign Language Studies 78 (Spring):31–52.
Siple, P. 1978. Visual constraints for sign language communication. Sign
Language Studies 7 (19):95–110.
References 201
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 201
Smith, W. H., and L. Ting. 1979. Shou neng sheng chyau: Sign language man-
ual, (Your hands can become a bridge), vol. 1. Taipei, Taiwan: Deaf Sign
Language Research Association of the Republic of China.
———. 1984. Shou neng sheng chyau: Sign language manual (Your hands can
become a bridge), vol. 2. Taipei, Taiwan: Deaf Sign Language Research
Association of the Republic of China.
Stampe, D. 1979. A dissertation on natural phonology. New York: Garland.
Stevens, K. N. 1971. Airflow and turbulence noise for fricative and stop con-
sonants: Static considerations. Journal of the Acoustical Society of Amer-
ica 50 (4, part 2): 1180–92.
Stokoe, W. C. 1978. Sign language structure: An outline of the visual commu-
nication systems of the American deaf. Studies in Linguistics: Occasional
Papers 8, (rev. ed.). Silver Spring, MD: Linstok Press.
Stokoe W. C., D. Casterline, and C. G. Croneberg. 1965. A dictionary of Amer-
ican Sign Language on linguistic principles. Silver Spring, MD: Linstok
Press. (Orig. pub. 1974.)
Stungis, J. 1981. Identification and discrimination of handshape in American
Sign Language. Perception and Psychophysics 29 (3):261–76.
Tai, J. H-Y. To appear. Modality effects: Iconicity in Taiwan Sign Language.
In Festschrift in celebration of Professor William S.-Y. Wang’s Seventieth
birthday, 19–36. Taipei, Taiwan: Academia Sinica.
Tennant, R. and M. G. Brown. 1998. The American Sign Language handshape
dictionary. Washington, D.C.: Gallaudet University Press.
Trubetzkoy, N. 1939. Principles of phonology. Berkeley: University of Cali-
fornia Press.
Tubiana, R. (ed.). 1981. The hand, vol. 1. Philadelphia: W. B. Saunders.
Tubiana, R., J.-M. Thomine, and E. Mackin. 1996. Examination of the hand
and wrist, 2d ed. London: Martin Dunitz Press.
Uyechi, L. 1996. The geometry of visual phonology. Dissertations in Linguis-
tics Series. Stanford, CA: Center for the Study of Language and Informa-
tion (CSLI) Publications.
Wells, K. F. 1966. Kinesiology: The scientific basis of human motion. Philadel-
phia: W. B. Saunders.
Wells, K., and K. Luttgens. 1976. Kinesiology: The scientific basis of human
motion, 6th ed. Philadelphia: W. B. Saunders.
202 References
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 202

Westbury, J. R., and P. Keating. 1986. On the naturalness of stop consonant
voicing. Journal of Linguistics 22: 145–66.
Wilbur, R. B. 1978. On the notion of derived segments in American Sign Lan-
guage. Communication and Cognition 11 (1): 79–104.
———. 1987. American Sign Language, 2d ed. Boston: Little, Brown.
———. 1990. Why syllables? What the notion means for ASL research. In
Theoretical issues in sign language research. Vol. 1, Linguistics, ed. S. D.
Fischer and P. Siple, 81–108. Chicago: University of Chicago Press.
———. 1993. Syllables and segments: Hold the movement and move the
holds! In Phonetics and phonology. Vol. 3, Current issues in ASL phonol-
ogy, ed. G. Coulter, 135–68. San Diego: Academic Press.
———. 1999a. A functional journey with a formal ending: What do brow
raises do in American Sign Language? In Functionalism and formalism
in linguistics. Vol. 1, General papers, ed. M. Darnell, E. Moravcsik, F.
Newmeyer, M. Noonan, and K. Wheatley, 294–314. Philadelphia: John
Benjamins.
———. 1999b. Stress in ASL: Empirical evidence and linguistic issues.
Language and Speech 42 (2–3):229–50.
Wilbur, R., and G. D. Allen. 1991. Perceptual evidence against internal struc-
ture in American Sign Language syllables. Language and Speech 34
(1):27–46.
Wilcox, S. 1992. The phonetics of fingerspelling. Philadelphia: Johns Benjamins.
Willerman, R. 1991. The phonetics of pronouns: A typological perspective.
Working paper, University of Texas at Austin.
———. 1994. The phonetics of pronouns: Articulatory bases of markedness.
Ph.D. diss., Department of Linguistics, University of Texas at Austin.
Woodward, J. 1982. Single finger extension: For a theory of naturalness in sign
language phonology. Sign Language Studies 37: 289–303.
———. 1985. Universal constraints on two-finger extension across sign lan-
guages. Sign Language Studies 46: 53–72.
———. 1987. Universal constraints across sign languages: Single finger con-
tact handshapes. Sign Language Studies 57: 375–85.
Zipf, G. K. 1935. The Psycho-biology of language: An introduction to dynamic
philology. Cambridge, MA: MIT Press.
References 203
Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 203

Ref_8033_JeanAnn_Gallaudet 8/31/06 1:50 PM Page 204
Index
Note. Italicized numbers indicate artwork.
205
abduction, 46, 61, 66, 68, 80, 97; anatomyand, 79–83; definition of, 78
Abraham, A. S., 36acoustics, 6, 19, 28, 30; relation to
handshape kinematics, 49adduction, 61, 66, 68, 88, 97; anatomy and,
79–83Allen, G. D., 25allophones, 8, 51–52American Sign Language, 1, 42, 46, 51, 52;
configurations in, 31; distinctive featuresof, 36; handshapes, 26, 29; —order ofacquisition, 40–41; movement and,47–48; phonetics of, 33–35; phonologicalfeatures of, 35–36; and signing space, 47;signs, 26; sign frequency and, 54, 77, 140;weak drop in, 48
anatomy: constraints on linguistic structure,4; ease of articulation and, 39–41; of thehand, 34; implications for sign languagehandshapes, 63–86; versus physiology, 56
Anderson, S., 14Ann, J., 25, 38, 49, 54, 55, 140, 203antagonism, 15, 57; in configurations of
handshapes, 89–93Archangeli, D., 89arm, 43, 47, 48
articulation: ease of, 34–35, 39–42, 45–46,54; and the grammar of sign languages,44; and handshapes, 2–3, 26–27, 42–43;and speech sounds, 12–23; and sonority,49, 87, 144, 197
articulators, 38, 193, 201; vocal, 15–18; insign language, 26–28
asymmetries, 7, 24, 48, 63, 84
Baker, S., 50–51Barlow, M., 9Battison, R., 25–27Bellugi, U., 32, 35, 36, 42, 47–48bite-block studies, 15–16, 89; and
compensatory articulation, 15; implicationfor ease of articulation, 15–16;supershapes and, 15, 89
bivalent features, 31, 32bones: of the fingers (phalanges), 58–59,
69, 79, 82–83; of the forearm (radius andulna), 61; and joints, 59–64; of the palm(metacarpus), 59; of the wrist (carpal),59, 60, 61
Bonvillian, J. D., 43, 54Boyes-Braem, P., 32, 35, 36, 96; stages of
handshape acquisition, 39–43Brentari, D., 25, 28n7, 30, 32, 38, 48–49, 51
Index_8033_JeanAnn_Gallaudet 8/31/06 9:12 AM Page 205

Browman, C. P., 17Bybee, J. L., 5, 10, 11, 17
carpometacarpal joints, 78, 81, 83;description of, 61–63; and ease ofarticulation, 184; of the fingers, 61–64,80–81, 84, 96; relation to the index andmiddle metacarpals, 64; of the thumb, 61,78, 84
Casterline, D., 46, 51categorical perception, 50, 51Cheek, D. A., 50Chomsky, N., 4circularity, 13, 14, 26classifiers, 54coarticulation, 49, 50, 89collateral ligaments, 79, 80compensatory articulation, 15consonants, 17, 19, 20constraints, 4, 8, 25, 26, 29; on handshapes,
141, 187–88; visual, 47, 49Corina, D., 31, 33, 37, 38Croneberg, C. G., 46, 47, 51
Dictionary of American Sign Language
(Stokoe, Casterline, and Croneberg),46, 54
dominance condition 25, 26, 27Donegan, P., 21–22
ease of articulation, 12–15, 35, 54; anatomyand, 39–41; bite-block studies and,15–16; definition of, 14; diachronic soundchange and, 22; and least effort, 12, 16;language acquisition and, 20–22; andmarkedness, 13; and maximal clarity, 12;in phonology, 14; ranking and, 89–101,speech sounds, 18; in TSL, 144–80;theory with handshapes, 18
ease score, 87, 138; calculating, 106–12,charting, 112–36; definition of, 87;determining, 102–4, rationale for, 104–6
extension, and adduction, 81; finger, 50, 52–
53, 57, 80, 84; hierarchy, 34–35; of thehand, 57–70, 77, 78; juncturae tendium,70–72; curved configuration, 76, bentconfiguration and, 76; support for, 94–95,99; 101–2
feature geometry, 37–39finger position constraint (Mandel), 87n1fingerspelling: acoustic phonetics and, 49fist, 63, 72, 77, 93, 140flexion, 31, 35, 66, 72–73, 101–2; and
adduction, 80–81; of the fingers, 74–78,140; support for, 89, 95–96, 106–7; of thethumb, 73–74
flexors, 45, 72–76, 84–86, 90–93forearm, 184–85, 199; joints and, 38, 45, 57;
muscles of, 67, 74, 75; wrist and, 59, 61formal linguistics, 7, 8; and asymmetries, 7,
24; and markedness, 8; and obstruents, 8;and sign language, 24–25
fricatives, 16, 18functional linguistics, 9; and frequency of
occurrence, 9–12; and sign language, 23functionalism, 3, 5, 6, 201
gestures, 1, 15, 17gestural scores, 17Goldstein, L. M., 17grounding theory, 7grammar 4, 7; in sign language, 25, 44,
188–89
hand, 24–26; bones of, 58–59;configurations of, 30–31, 45, 57; joints,59–64; juncturae tendium and, 70–72;muscles of, 64–70, 90–93
handshape: acquisition of, 27, 39–44;adjacency convention and, 30, 34;anatomy and, 57–58; antagonism and, 90;categorical perception and, 50–51;configurations, 31–39, 88–89, 92–93;constraints and, 25, 47; constructs and,24–25; definition of, 1–2, 87–88; ease of
206 Index
Index_8033_JeanAnn_Gallaudet 8/31/06 9:12 AM Page 206

articulation, 2, 3, 18; features of, 36–39;flexion hierarchy, 35; frequency ofoccurrence, 7, 52–55, 143–44; kinematics,49; muscle opposition in, 89–93; one-group, 97, 98, 99–100, 106–7, 144, 146,147; opposition hierarchy, 35; and pathmovement, 44, 45; phonological rulesand, 25; properties of, 27, 53; synergyand, 90; two-group, 97–99, 106, 107–8,144, 146, 147; variation and, 49
Hayes, B. P., 8Hopper, P., 5, 10Hulst, H., van der, 38
intrinsic muscles, 76Israeli Sign Language: markedness and, 53
Johnson, R. E., 32joints, 31, 59–86, 96, 101; distal, 33–34, 44;
and feature geometry, 38; proximal,33–34, 43, and tenodesis, 44–45, 47
juncturae tendinum, 35, 66, 70–72, 85n18,199; and the support for extensioncriterion, 94–95
Keating, P., 13, 16Kegl, J., 30Kemmer, S., 9kinematics, 26, 27, 44, 47, 184kinesiology, 26, 46–47Klima, E., 48, 183knuckle, 31–32, 38, 59, 60–61, 79–81, 83
Ladefoged, P., 13Lane, H., 32, 36, 42language acquisition, 20, 21lenitions 20, 21Liddell, S., 32Lindblom, B., 13, 14, 18n4, 19, 89linguistics 5, 8, 9, 143Locke, J. L., 20Loncke, F., 47lumbricals, 69–70, 74, 76, 91
Lupton, L., 48Lutes-Driscoll, V., 47–48
Maddieson, I., 12n1, 19Mandel, M. A., 33–35, 37–38, 45–46,
79n17, 96, 187; finger position constraint,87n1, 140
markedness, 8, 9, 13, 189Mathur, G., 44MacFarlane, J., 54McIntire, M., 42–43Meir, R. P., 43Miller, G. A., 35–36Miyawaki, K., 36muscle opposition criterion, 89–94, 98–99,
102–6, 108, 113–14Morford, J. P., 54Moy, A., 51muscles: anatomy of, 64–66; of the fingers,
72–76, 82, 85, 89–92, 95; movement and,56–57; and tenodesis, 44–46; of thethumb, 65–67
Nathan, G. S., 20, 22Nelson, W. L., 17Newmeyer, F. J., 4, 5Nicely, P. E., 35–36
Ohala, J. J., 17, 22–23opponens: digiti minimi 35, 79, 82, 96;
pollicis, 78–79, 82–83, 96opposition, 101, 185; hierarchy and, 34–35;
of muscles, 89–94, 105; and the thumb,66, 74, 78–79, 96
Padden, C. A., 25palm, 57, 62, 77, 96; bones of, 57, 60;
movement, 45–46, orientation, 1–2, 38,tendons of, 68
Perkell, J. S., 17Perlmutter, D., 25phalanges, 58–59
Index 207
Index_8033_JeanAnn_Gallaudet 8/31/06 9:12 AM Page 207

phonetics, 12, 13; of fingerspelling, 49; andphonology, 6–7, 28, 89; sign languageand, 32–33, 47–48, 183–88; and TSL,182–83
phonology, 6; articulatory, 6, 17; ease ofarticulation in, 14; features and, 27–28;grounded, 89, laboratory, 6; natural,20–22; processes, 20; and sign language,13, 25, 32, 200
Pierrehumbert, J., 9pinky finger, 84, 87–88, 95, 97, 102;
abduction and, 82; and acquisition ofhandshapes, 39–42; extensor tendons and,71–72, 84–85; flexion and, 74–75; joints,63–64, 96; opposition and, 79; oppositionhierarchy and, 34–35; and ulnar node, 37
Poizner, H., 47–48Prince, A., 189Pulleyblank, D., 89
radiocarpal joints, 61, 63, 184Rathmann, C., 44
Sagey, 31, 38Sandler, W., 25, 31, 37n11, 38, 53Saussure, F. de, 4segments, 8, 12–13, 21, 24Siedlecki, T., Jr., 43, 54sign language, 23–25, 28, 51; anatomy and,
26, 83–86; acquisition of, 43; features of,28–29, 36–39; formal approaches to, 24–25; functional approaches to, 26–27;grammar of, 44; phonology, 24; research,23; symmetry and dominance conditionstheory, 26; and visual constraints, 47; andweak drop, 48
signs: anatomy and, 27, 38, 43–44, 46–47,50; constraints and, 25; frequency, 54–55;
and handshapes, 141–43, 166–67; partsof, 1, 23–25
Siple, P., 47Smith, W. H., 2, 54, 139, 141–43sonority, 48–49sounds, 8, 12–17, 36, 50; categorical
perception and, 50; phonology and,27–28; 187–88; speech, 18–23, 35–36
space, 37, 44, 59, 79, 81; signing and, 24, 46, 47
[spread] feature, 37–38spontaneous voicing, 16Stokoe, W. C., 46, 47, 51stops, 18Stungis, J., 36Sundberg, J., 89supershapes, 15, 16, 89symmetry, 9, 11, 25symmetry and dominance conditions theory,
25–27
Taiwan Sign Language: handshapes and, 2–3, 25, 44–45, 54–55, 138–80, 181–83,195, 197
tendons: extensor, 56, 68–69, 69, 72; andmuscles, 64, 65, 67, juncturae tendinum,70–72; of the fingers, 74–75, 80–85
tenodesis: definition of, 44–46, 79n17. See
wristtoken frequency, 10, 182; definition of, 11–
12; in TSL, 139; 143–45, 148, 158, 163–79
type frequency, 54–55, 148; definition of,10–11; of TSL handshapes, 139–44, 148,149–62
Uyechi, L., 24, 33
208 Index
Index_8033_JeanAnn_Gallaudet 8/31/06 9:12 AM Page 208
vowels, 18
Westbury, J. R., 13, 16, 17Wilbur, R. B., 23, 37n12, 181, 183;
adjacency convention, 30; construct ofsyllable, 25
Wilcox, S., 47, 49Willerman, R., 13, 14n3, 17, 18, 19, 20n5, 26
Woodward, J., 52–53wrist, 38, 43, 88; bones of, 58–59; joints of,
61–64, —physiological result of thecarpometacarpal joint, 63–83; andtenodesis, 44–46
Zelaznik, H., 48Zipf, G. K., 9
Index 209
Index_8033_JeanAnn_Gallaudet 8/31/06 9:12 AM Page 209

Index_8033_JeanAnn_Gallaudet 8/31/06 9:12 AM Page 210