johan pellebergs saab aeronautics - icao.int · intruder has to comply with roa 1 2 3 overtaking...
TRANSCRIPT

The MIDCAS project Johan Pellebergs
Saab Aeronautics

MIDCAS
EDA is the contracting agency for the MIDCAS project on behalf of the contributing members states:
Sweden (lead)
Germany
France
Italy
Spain
Approx 50 MEuro budget – biggest single project within EDA
Contract signed at the Paris Air Show, June 2009 with an industry consortium of 13 partners from the 5 nations
Project started 15 Sep 2009 and will run for 4 years
European Defense Agency

MIDCAS mission statement
“The MIDCAS mission is to demonstrate the baseline of
solutions for the UAS Midair Collision Avoidance
Function (including separation), acceptable by the
manned aviation community and being compatible with
UAS operations in non-segregated airspace by 2015”
MIDCAS scope has been defined with due consideration for the views
of the main European stakeholders: EASA, EUROCONTROL,
EUROCAE WG73
MIDCAS main objectives
The MIDCAS project is designed with focus on 3 main
tracks with high level of interaction and
interdependency:
Progress on Standards for S&A
Design of a generic S&A function to be tested in
simulations
Design of a S&A demonstrator to be tested in
manned and UAS flight
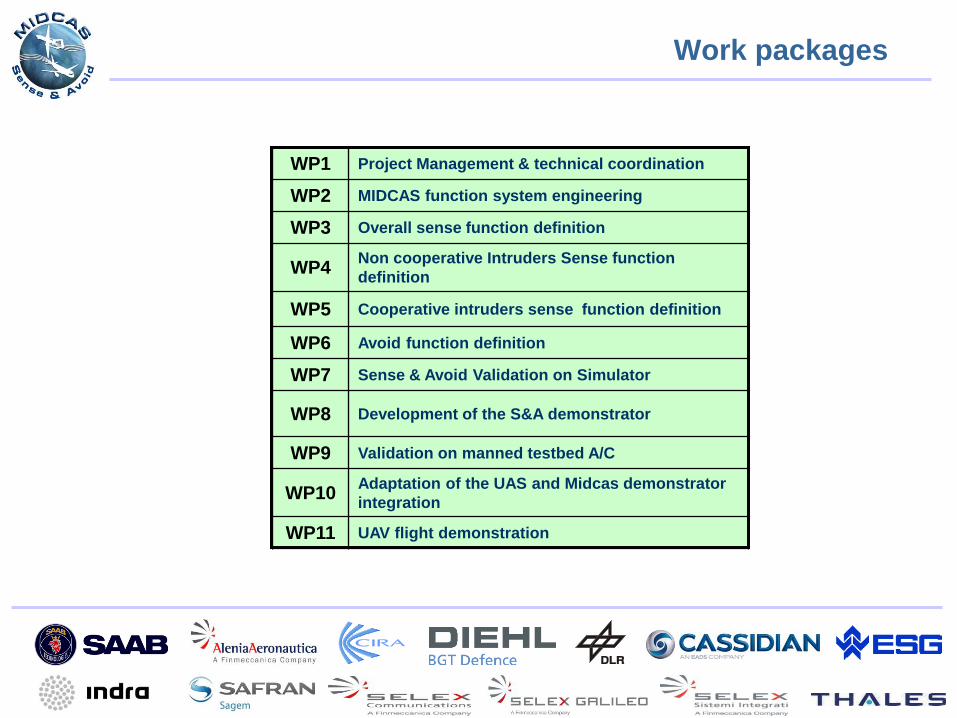
Work packages
WP1 Project Management & technical coordination
WP2 MIDCAS function system engineering
WP3 Overall sense function definition
WP4 Non cooperative Intruders Sense function
definition
WP5 Cooperative intruders sense function definition
WP6 Avoid function definition
WP7 Sense & Avoid Validation on Simulator
WP8 Development of the S&A demonstrator
WP9 Validation on manned testbed A/C
WP10 Adaptation of the UAS and Midcas demonstrator
integration
WP11 UAV flight demonstration

MIDCAS Schedule
Func. Design
incl S/W
Implementation Design Verification Formal Verification
& AW Testing Flight Test Management
CER PDR CDR
MIDCAS Demo
H/W Design Modification
& Integration Simulator Test Systems Eng.
Increment 1
Functional Flight Tests Sensor Flight Tests
2010 2011 2012 2013
Non-segr Flight
Increment 2
Sensor H/W
System H/W 1 (manned)
System H/W 2 (UAV)
Demonstrator SE
Sim development
1 2 3
1
SE Framework (Standardization)
Concept SE
Project management and Technical coordination
H/W Design
Tests in simulators
Tests in manned a/c
Functional Design
Systems Eng.
Tests in UAV
Management
Work Shop with
Stakeholders
Assessment SE Functional SE
Increment 3
Increment 4a
2
S&A Flights
Incr 4b
1 2
4

Safety layers
ATC
manages
separation
ATM
Strategic
conflict
management
TA issued
for TCAS intruder
RA issued
for TCAS intruder Manned
See and avoid
Existing safety layers (manned aviation)
Manned
Self Separation

Safety layers
S&A
Collision Avoidance
S&A
Traffic Avoidance
S&A
Situational
Awareness
Introduced by MIDCAS
ATC
manages
separation
ATM
Strategic
conflict
management
TA issued
for TCAS intruder
RA issued
for TCAS intruder Manned
See and avoid
Existing safety layers (manned aviation)
Manned
Self Separation
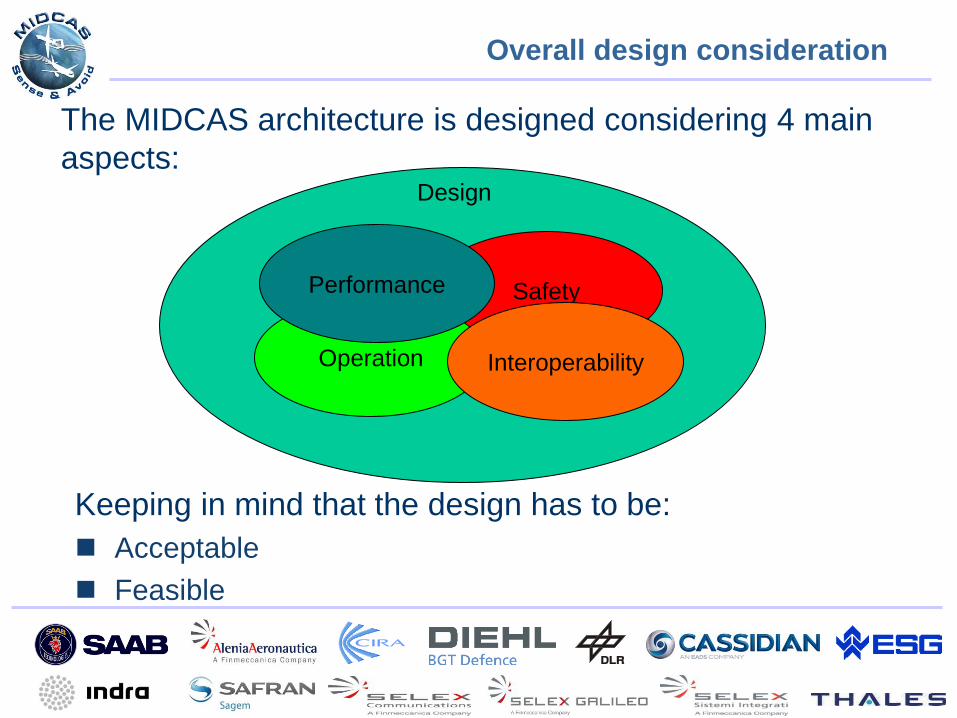
Overall design consideration
The MIDCAS architecture is designed considering 4 main
aspects:
Safety
Operation Interoperability
Performance
Design
Keeping in mind that the design has to be:
Acceptable
Feasible
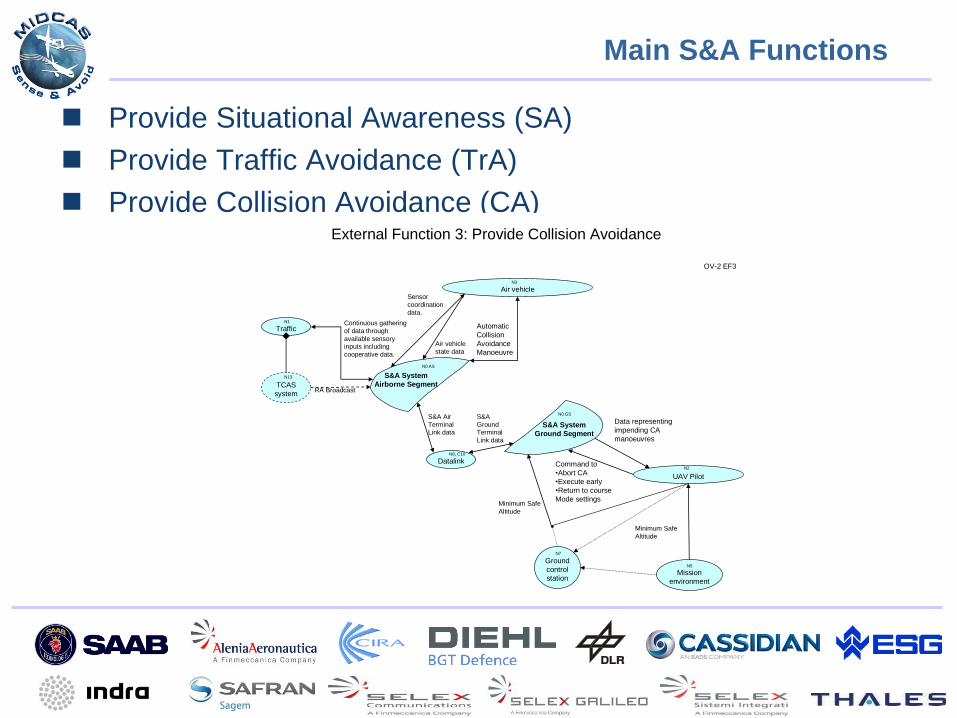
Main S&A Functions
Provide Situational Awareness (SA)
Provide Traffic Avoidance (TrA)
Provide Collision Avoidance (CA)
External Function 3: Provide Collision Avoidance
OV-2 EF3
Air vehicle
state data
Mission
environment
N5
Minimum Safe
Altitude
DatalinkN8, C10
Sensor
coordination
data.
S&A
Ground Terminal
Link data
S&A Air
Terminal Link data
N0.AS
S&A System
Airborne Segment
N0.GS
S&A System
Ground Segment
TrafficN1
Air vehicleN3
UAV Pilot
N2
Data representing
impending CA
manoeuvres
Command to
•Abort CA
•Execute early
•Return to course
Mode settings
Automatic
Collision
Avoidance
Manoeuvre
Continuous gathering
of data through
available sensory inputs including
cooperative data.
TCAS
system
N13
RA Broadcast
Ground
control
station
N7
Minimum Safe
Altitude
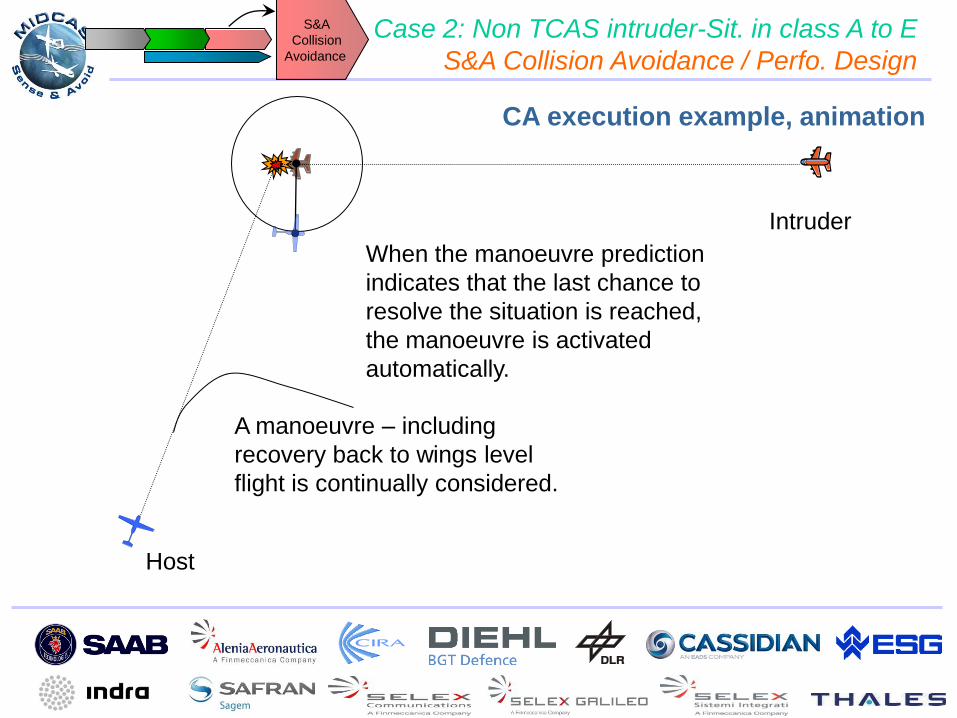
Host
Intruder
A manoeuvre – including
recovery back to wings level
flight is continually considered.
When the manoeuvre prediction
indicates that the last chance to
resolve the situation is reached,
the manoeuvre is activated
automatically.
CA execution example, animation
S&A
Collision
Avoidance
Case 2: Non TCAS intruder-Sit. in class A to E
S&A Collision Avoidance / Perfo. Design

CA execution example
after manoeuvre
Collision
avoidance
manoeuvre
trajectory
Collision Volume (CV)
Uncertainties
(safety margin)
Host
Intruder
Closest Point of
Approach (CPA) Collision volume is a given
volume extending 500 ft
horizontally and 350 ft vertically.
Depending on how the analysis
is made you can envision it
either around the host or the
intruder (but not both).
In the system it just becomes a
range, which varies due to the
relative geometry.
S&A
Collision
Avoidance
Case 2: Non TCAS intruder-Sit. in class A to E
S&A Collision Avoidance / Perfo. Design
Protected Volume (PV)

Operational capabilities - Collision Avoidance
Collision avoidance timeline
CA Alert Automatic CA
threshold
CA manoeuvre
completed
Automatic CA
threshold + 10s
Once this threshold is reached,
automatic manoeuvre is
engaged at maximum UAV
manoeuvring capabilities.
7 km – 18 s to
CPA (max)
Pilot take into account the
proposed manoeuvre, approve
or override it.
Closest Point of
Approach (CPA)

Operational capabilities – ICAO ROA
ROA compliance
Sectors of interest
70
70
30 - 110
30 - 110
0 - 30
0 - 30
+/ - 15
-
Traffic Avoidance assistance :
The direction of the manoeuvre is biased to take own right of ways Rules of the Air into account.
Collision Avoidance :
The direction of the manoeuvre is weighted to the right for head-on cases, and behind the intruder for beam cases coming from the right. The CA capability does not consider own right-of-way
1 Intruder head-on or approximately, or intruder crossing
ahead or being overtaken
2 All intruders converging from the right sector have the
priority
3 Intruder converging from left sector : the UAV has the right-
of-way, except for priority intruders
4 Overtaking intruders : the UAV has the right-of-way, the
intruder has to comply with ROA
1
2
3 4
Overtaking
traffic
All traffic
Priority traffic

Sensor flight tests
An initial sensor flight test campaign has been performed with the purpose to gather data to be used for:
development of image processing algorithms
sensor models for simulation
Two different types of sensors have been integrated into the nose of a CASA C-212 test aircraft
two visible band (EO) cameras
one infrared (IR) camera
EO IR

Flight test demonstrations
Alenia Sky-Y
CASA C-212
S&A design to be evaluated in: • 2 Manned aircraft flight test campaigns
• 2 UAS flight test campaigns

MIDCAS support to Civil aviation standards
Tech standards,
MASPS, MOPS
Ops rules, regs, stds
AMC for ESARRs
ED docs for ETSO
Main stakeholders
CAAs
pilots associations
Airlines,
Aerospace Industry…
coordination
MIDCAS
ICAO
Standardization process
Generic Design work provides information to be used for
standardization support
Information is used to define Working papers that are
presented in different stakeholder and standardization forums
EUROCAE WG73
Stakeholder workshops: 6 arranged over the project duration
Stakeholder Advisory Group
Study Notes presented in ICAO UAS study group
Information available on www.midcas.org
Feedback from stakeholders is incorporated in MIDCAS continued work

MIDCAS Stakeholder Workshops
Six dedicated workshops aims at informing and getting feedback from the major aviation stakeholders about MIDCAS project progress (www.midcas.org)
WS 1 General presentation of the project: objectives, methodology and time schedule (16 February 2010)
WS 2 Midair collision avoidance CONOPS and MIDCAS system operational capabilities (5 October 2010)
WS 3 Preliminary design: Operational, Performance, Interoperability and Safety aspects (23 Feb 2012)
WS 4 Safety methodology and simulation capabilities, system integration and interface features with the UAS including HMI aspects
WS 5 Presentation of the overall results of safety and performance studies based on simulations results
WS 6 Presentation of UAS flight tests results and general conclusions
of the project

Key issues and challenges
TCAS compatibility; definition
Safety objective breakdown; contributors and allocation
How to handle different UAV types; slow vs fast, maneuverability
Sensors; types and performances
Rules of Air; interpretation
Field of view for Sensors; safe, acceptable, feasible
Transition Traffic Avoidance -> Collision Avoidance concept.
Effect of future ATM; NEXTGEN/SESAR, ADS-B based
Standard; High level requirements or pseudo code

MIDCAS main outcome
Main outcome of the MIDCAS project with respect to the 3 main tracks:
Progress on Standards for S&A Support the establishment of standards that enables design of S&A systems
Targets air space classes A-G, initial focus on A-C in line with WG 73
Challenge to arrive at reasonable performance and safety requirements
Design of a generic S&A function to be tested in simulations Covers self separation, collision avoidance and situation awareness
TCAS compatible
Feasible for different types of UAS
Possible to evolve over time as technology progresses
Designed to TRL 6
Design of a S&A demonstrator to be tested in manned and UAS flight Perform relevant demonstrations in flight
Targets final demonstration with UAS in non segregated air space
Pushes positions of authorities approving flights