kinematics of particles - yidnekachew · a girl rolls a ball up an incline and allows it to return...
TRANSCRIPT

Kinematics of Particles
Chapter 2

Introduction Kinematics: is the branch of dynamics which describes the
motion of bodies without reference to the forces that eithercauses the motion or are generated as a result of the motion.
Kinematics is often referred to as the “geometry of motion” Examples of kinematics problems that engage the attention of
engineers. The design of cams, gears, linkages, and other machine elements to
control or produce certain desired motions, and The calculation of flight trajectory for aircraft, rockets and spacecraft.

If the particle is confined to a specified path, as with a bead
sliding along a fixed wire, its motion is said to be
Constrained.
Example 1. - A small rock tied to the end of a string and
whirled in a circle undergoes constrained motion
until the string breaks

If there are no physical guides, the motion is said to be unconstrained.
Example 2. - Airplane, rocket

Let’s consider a particle and its path of travel The position of particle P at any time t can be
described by specifying its: Rectangular coordinates; X,Y,Z Cylindrical coordinates; r,θ,z spherical coordinates; R, θ,Ф
Also described by measurements along the tangent t and normal n to the curve(path variable).
The motion of particles(or rigid bodies) maybe described by using coordinates measuredfrom fixed reference axis (absolute motionanalysis) or by using coordinates measuredfrom moving reference axis (relative motionanalysis).
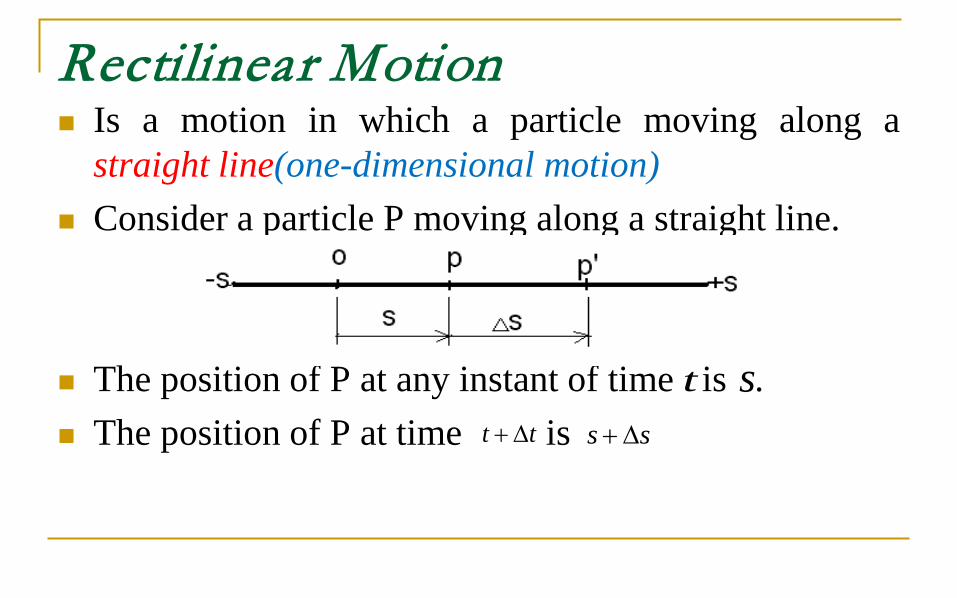
Rectilinear Motion Is a motion in which a particle moving along a
straight line(one-dimensional motion) Consider a particle P moving along a straight line.
The position of P at any instant of time is . The position of P at time is
tt t+ ∆
ss s+ ∆
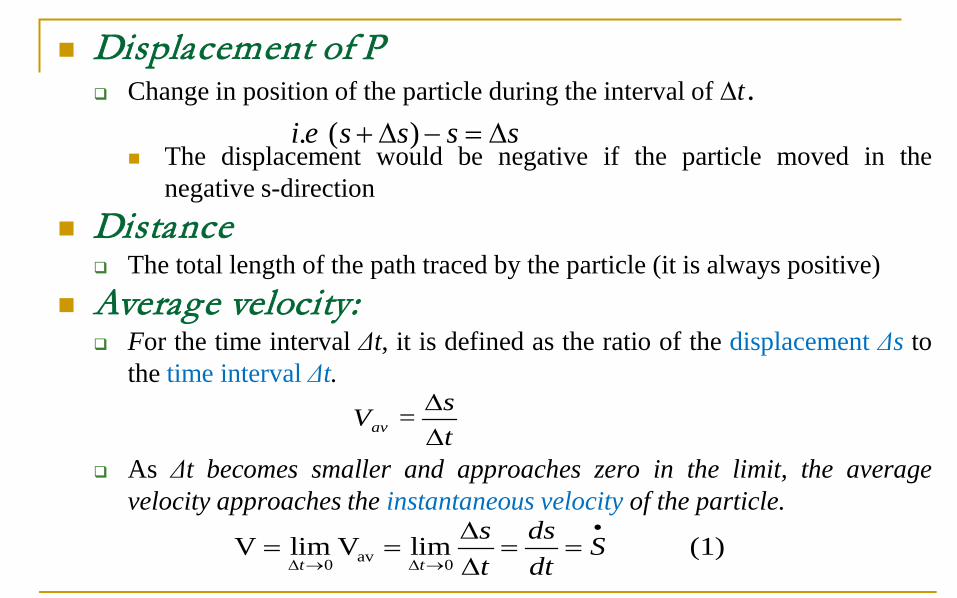
Displacement of P Change in position of the particle during the interval of .
The displacement would be negative if the particle moved in thenegative s-direction
Distance The total length of the path traced by the particle (it is always positive)
Average velocity: For the time interval Δt, it is defined as the ratio of the displacement Δs to
the time interval Δt.
As Δt becomes smaller and approaches zero in the limit, the averagevelocity approaches the instantaneous velocity of the particle.
t∆. ( )i e s s s s+ ∆ − = ∆
ts =Vav ∆
∆
av0 0V lim V lim (1)
t t
s ds St dt
•
∆ → ∆ →
∆= = = =
∆
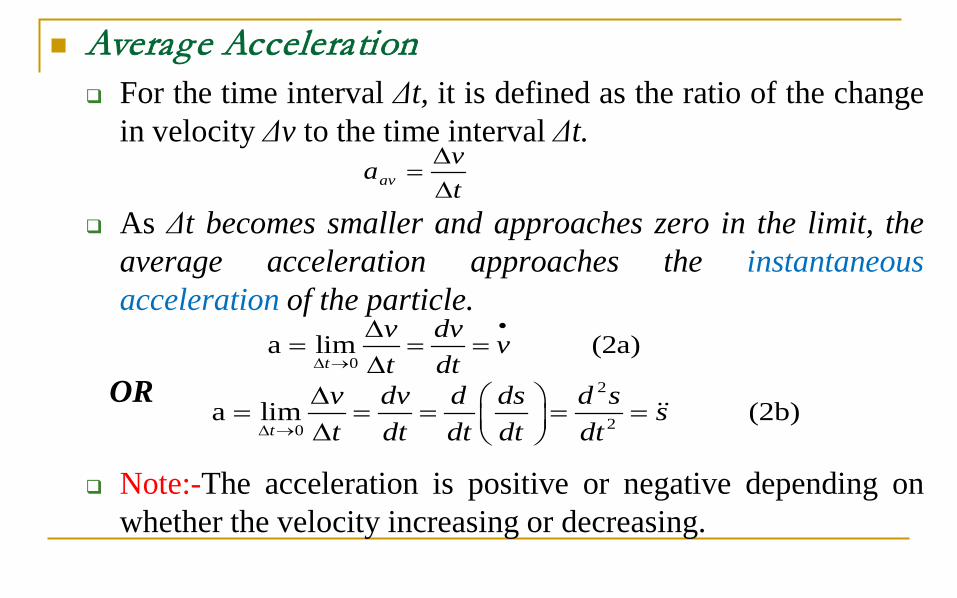
Average Acceleration For the time interval Δt, it is defined as the ratio of the change
in velocity Δv to the time interval Δt.
As Δt becomes smaller and approaches zero in the limit, theaverage acceleration approaches the instantaneousacceleration of the particle.
OR
Note:-The acceleration is positive or negative depending onwhether the velocity increasing or decreasing.
tvaav ∆
∆=
0a lim (2a)
t
v dv vt dt
•
∆ →
∆= = =
∆2
20a lim (2b)
t
v dv d ds d s st dt dt dt dt∆ →
∆ = = = = = ∆
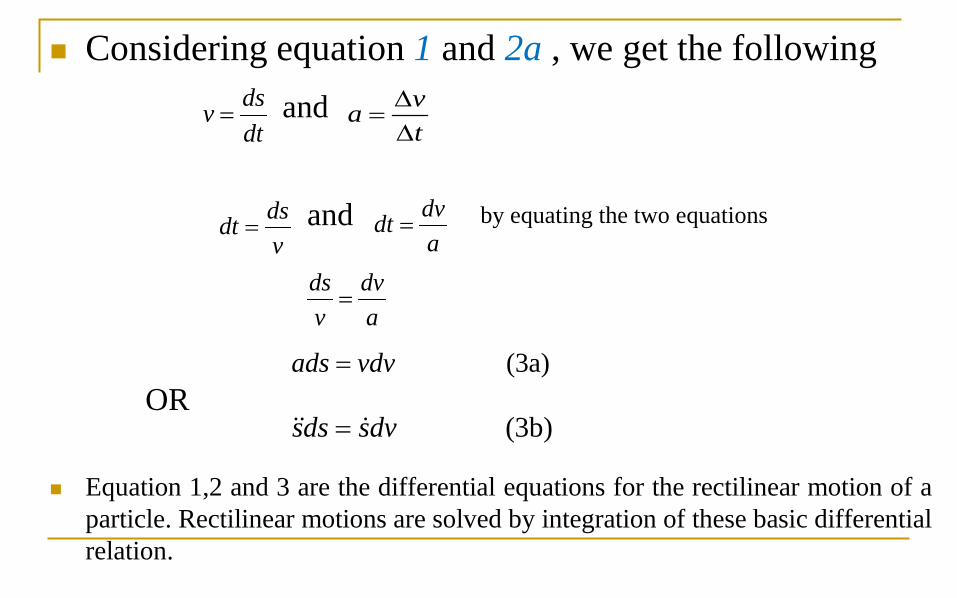
Considering equation 1 and 2a , we get the following and
and
OR
Equation 1,2 and 3 are the differential equations for the rectilinear motion of aparticle. Rectilinear motions are solved by integration of these basic differentialrelation.
dsvdt
= vat
∆=∆
dsdtv
=dvdta
=
ds dvv a=
(3a)ads vdv=
(3b)sds sdv=
by equating the two equations

Example

1. A particle a particle moving in a straight line, andassuming that its position is defined by the equation.
Where, t is express in seconds and s is in meters.Determine the velocity and acceleration of the particlesat any time t.
2 36 -s t t=

2. The acceleration of a particle is given by ,
where a is in meters per second squared and t is inseconds.
Determine the velocity and displacement as functiontime. The initial displacement at t=0 is so=-5m, andthe initial velocity is vo=30m/s.
4 30a t= −

Graphical Representation of Relationship Among s, v, and t

Graph of s Vs t By constructing tangent
to the curve at any timet, we obtain the slope,the slope of the s-tcurve at any timeinstant gives theinstantaneous velocityv=ds/dt

Graph of v Vs t The slope the s-t curve at any instant
gives the instantaneous acceleration. The area under the v-t curves is the net
displacement of the particle during theinterval from t1 to t2.
dA vdt=2
1
t
tA vdt= ∫
,dsvdt
= ds vdt=2 2
1 1
s t
s tds vdt=∫ ∫
Equating the two equations gives2
1
,s
sA ds= ∫ 2 1A s s= −
The area under the v-t curve is thenet displacement of the particleduring the interval from t1 to t2.

Graph of a Vs t The area under the a-t curve is
the net change in velocity of theparticles t1 to t2.
dA adt=2
1
t
tA adt= ∫
,dvadt
= adt dv=
2 2
1 1
t v
t vadt dv=∫ ∫
Equating the two equations gives2
1
v
vA dv= ∫
2 1A v v= −
The area under the a-t curve duringtime dt is the net change in velocity ofthe particle between t1 and t2.
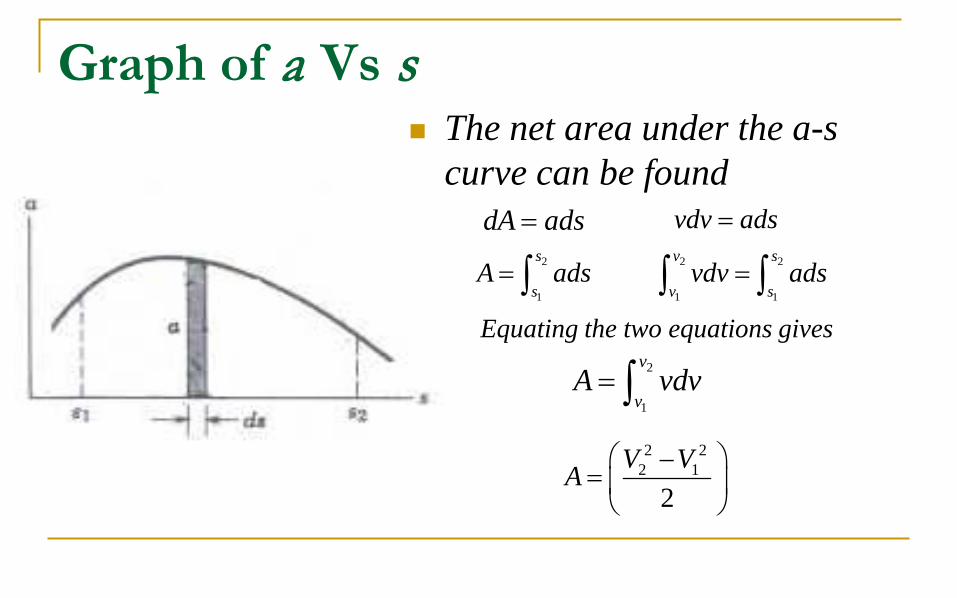
Graph of a Vs s The net area under the a-s
curve can be founddA ads=
2
1
s
sA ads= ∫
vdv ads=2 2
1 1
v s
v svdv ads=∫ ∫
Equating the two equations gives2
1
v
vA vdv= ∫
2 22 1
2V VA −
=

since, tan1
tan
dvds
Similar TriangleCBv
θ
θ
=
=
,dv CB vdv CBdsds v
= ⇒ = vdv ads=Equating the two equations gives
CBds ads=
CB a=From the graph distance CB is acceleration

The graphical representations described are usefulfor:- visualizing the relationships among the several motion
quantities. approximating results by graphical integration or
differentiation. experimental data and motions that involve discontinuous
relationship b/n variables are frequently analyzedgraphically.

Methods for determining the velocity and displacement
Function
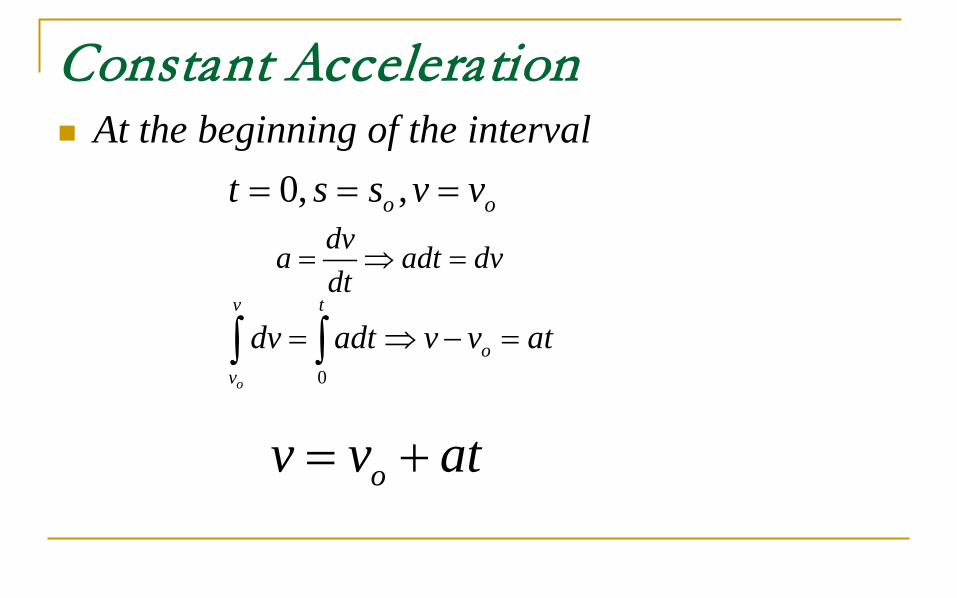
Constant Acceleration At the beginning of the interval
0, ,o ot s s v v= = =dva adt dvdt
= ⇒ =
0o
v t
ov
dv adt v v at= ⇒ − =∫ ∫
ov v at= +

using vdv ads=
o o
v s
v s
vdv ads=∫ ∫2
2v s
v oo sv as=
( )2 2
2o
ov v a s s−
= −
2 202ov v a(s s )= + −

Using dsvdt
=
ds vdt=
0
( )s t
os o
ds v at dt= +∫ ∫2
2o oats s v t− = +
212o os s v t at= + +

These relations are necessarily restricted to the special casewhere the acceleration is constant.
The integration limits depend on the initial and finalconditions and for a given problem may be different fromthose used here.
Typically, conditions of motion are specified by the type ofacceleration experienced by the particle. Determination ofvelocity and position requires two successive integrations.
Three classes of motion may be defined for:- acceleration given as a function of time, a = f(t)- acceleration given as a function of position, a = f(x)- acceleration given as a function of velocity, a = f(v)
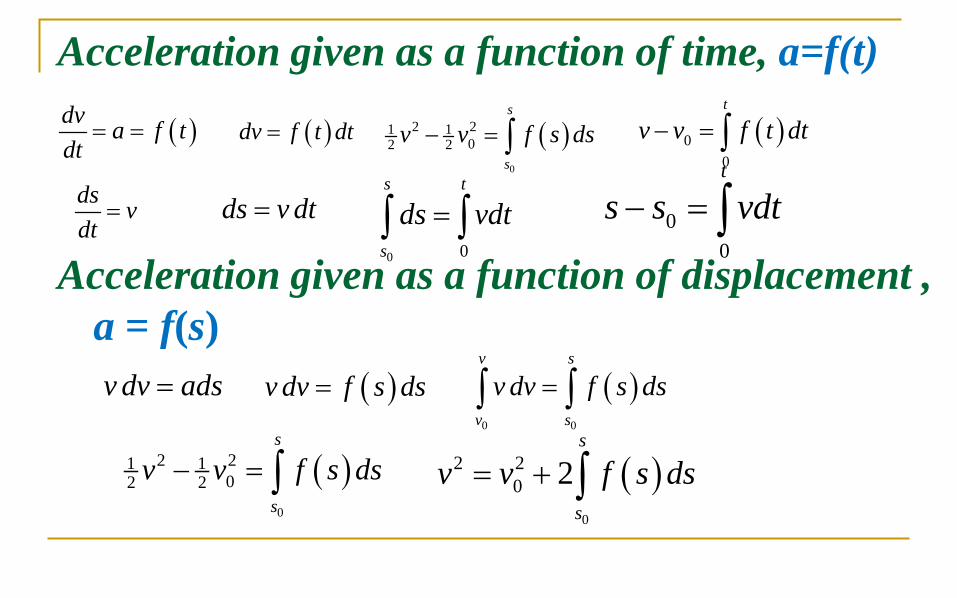
Acceleration given as a function of time, a=f(t)
Acceleration given as a function of displacement , a = f(s)
( )dv a f tdt
= = ( )dv f t dt= ( )0
2 21 102 2
s
s
v v f s ds− = ∫ ( )00
t
v v f t dt− = ∫ds vdt
= ds v dt=0 0
s t
s
ds vdt=∫ ∫ 00
t
s s vdt− = ∫
v dv ads= ( )v dv f s ds= ( )0 0
v s
v s
v dv f s ds=∫ ∫
( )0
2 21 102 2
s
s
v v f s ds− = ∫ ( )0
2 20 2
s
s
v v f s ds= + ∫

Acceleration g iven as a function of velocity, a=f(v)
( )dv a f vdt
= = ( )dv dt
f v=
( )0 0
v t
v
dv dtf v
=∫ ∫
( )0
v
v
dv tf v
=∫
vdv ads= ( )vdv f v ds= ( )v dvdsf v
=( )
0 0
s v
s v
v dvdsf v
=∫ ∫
( )0
0
v
v
v dvs sf v
− = ∫

Examples

1. The position of a particle which moves along astraight lines is defined by the relation
Where S is expressed in m and t in second.Determine:
a) The time which the velocity will be zero.b) The position and distance travelled by the particle at that
time.c) The acceleration of the particle at that time.d) The distance travelled by the particle between 4 sec and 6
sec.
3 26 15 40S t t t= − − +
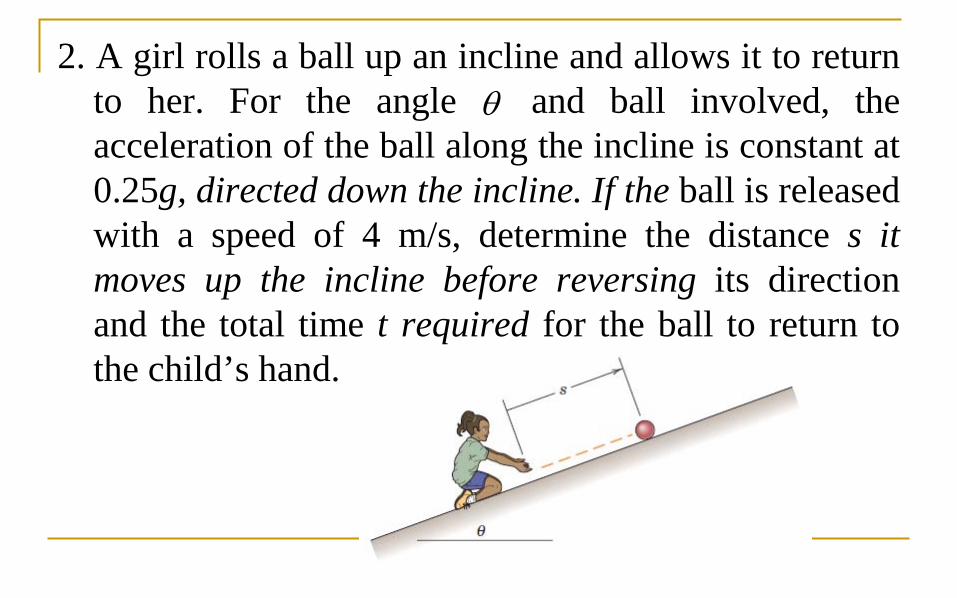
2. A girl rolls a ball up an incline and allows it to returnto her. For the angle and ball involved, theacceleration of the ball along the incline is constant at0.25g, directed down the incline. If the ball is releasedwith a speed of 4 m/s, determine the distance s itmoves up the incline before reversing its directionand the total time t required for the ball to return tothe child’s hand.
θ

3.The main elevator A of the CN Tower in Torontorises about 350 m and for most of its run has aconstant speed of 22 km/h. Assume that both theacceleration and deceleration have a constantmagnitude of and determine the time duration tof the elevator run.
14
g
4. A sprinter reaches his top speed of 10.6m/s in t second fromrest with essentially constant acceleration. If he maintains hisspeed and covers the 100m distance in 10.5 s, find theacceleration interval t and his average starting acceleration a.

5. A motorcycle patrolman starts from rest at A two seconds aftera car, speeding at the constant rate of 120 km/h, passes pointA. If the patrolman accelerates at the rate of 6 m/s2 until hereaches his maximum permissible speed of 150 km/h, which hemaintains, calculate the distance s from point A to the point atwhich be overtakes the car.
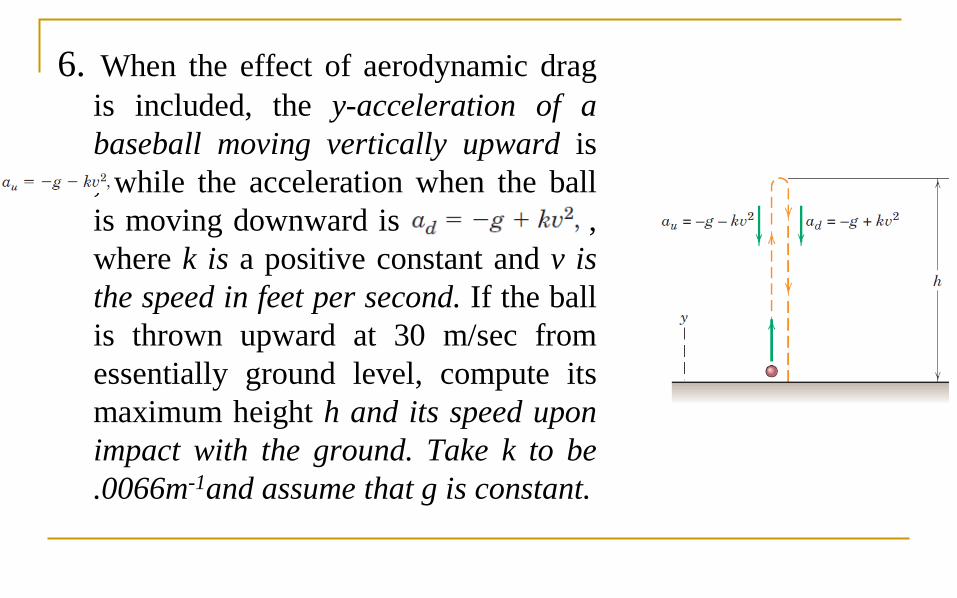
6. When the effect of aerodynamic dragis included, the y-acceleration of abaseball moving vertically upward is, while the acceleration when the ballis moving downward is ,where k is a positive constant and v isthe speed in feet per second. If the ballis thrown upward at 30 m/sec fromessentially ground level, compute itsmaximum height h and its speed uponimpact with the ground. Take k to be.0066m-1and assume that g is constant.

Plane Curvilinear Motion

The motion of a particle along a curved path that lies on a singleplane.
Consider the continuous motion of a particle along a plane curve. At time t, the particle is at position A, which is
located by the position vector r measured fromsome convenient fixed origin o.
At time , the particle is at A’ located by theposition vector .
The vector Δr joining A and A’ represents thechange in the position vector during the timeinterval Δt (displacement).
The distance actually traveled by the particle asit moves along the path from A to A’ is the scalar∆s.
tt ∆+
rr ∆+

The average velocity of the particle between A and A’ defined as:
The average speed of the particle between A and A’ defined as:
The instantaneous velocity,
As ∆t approaches zero, the direction of approaches to the tangent of thepath. Hence the velocity V is always a vector tangent to the path.
avrvt
∆=∆
0lim
t
rvt∆ →
∆=
∆
drdt
=
r=
avsVt
∆=∆
r∆
dsV v sdt
= = =

Average acceleration, of the particle between A and A’
Instantaneous acceleration,
Note: The direction of the acceleration of a particle in curvilinear motion is neither tangent to the path nor normal to the path.
avvat
∆=∆
a
0lim
t
v dva vt dt∆ →
∆= = =
∆
For curvilinear motion of a particle in a planethere are three different coordinate systems. Rectangular coordinate (x, y, z) Normal and tangential coordinate (n-t) Polar coordinates (r-Ɵ)

Rectangular coordinates (x-y) The resulting curvilinear motion is obtained by a vector
combination of the x- and y-components of the position vector,the velocity, and the acceleration.
Consider the following figure We may write the vectorsin terms of their x and y components.
, r v and a
r xi yj= +
v r xi yj= = +
x yv v= +
a v r xi yj= = = +
x ya a= +

The direction of the velocity is always tangent to the path The magnitude of the motion vectors
2 2r x y= +2 2
x yv v v= +
2 2x ya a a= +
1tan y
x
vv
θ −=

Projectile motion Neglect the aerodynamic drag, the earth curvature and
rotation, The altitude range is so small enough so that the acceleration
due to gravity can be considered constant, therefore;
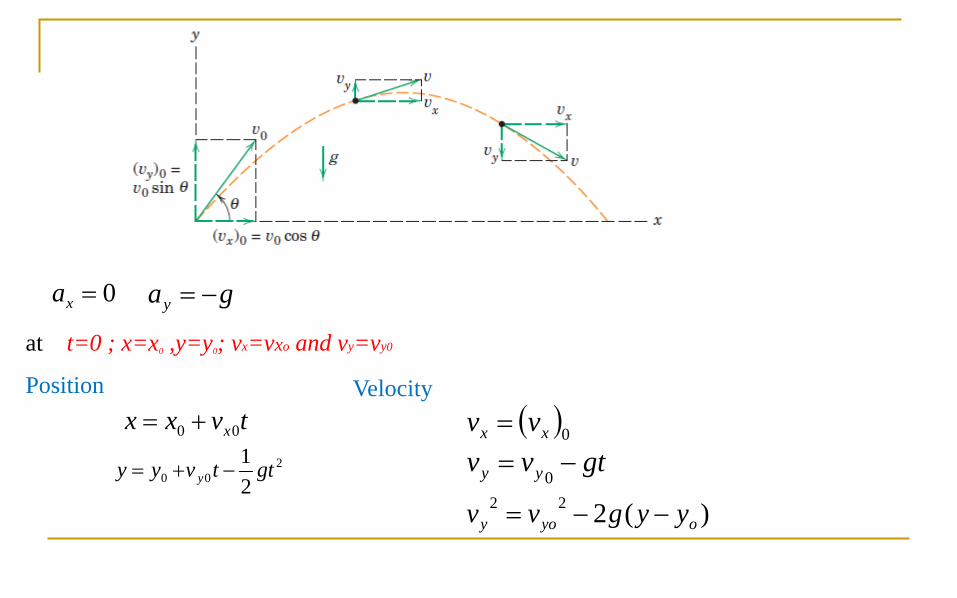
0=xa gay −=
at t=0 ; x=x0 ,y=y0; vx=vxo and vy=vy0
Positiontvxx x00 +=
200 2
1 gttvyy y −+=
Velocity( )0xx vv =
gtvv yy −=0
)(222oyoy yygvv −−=
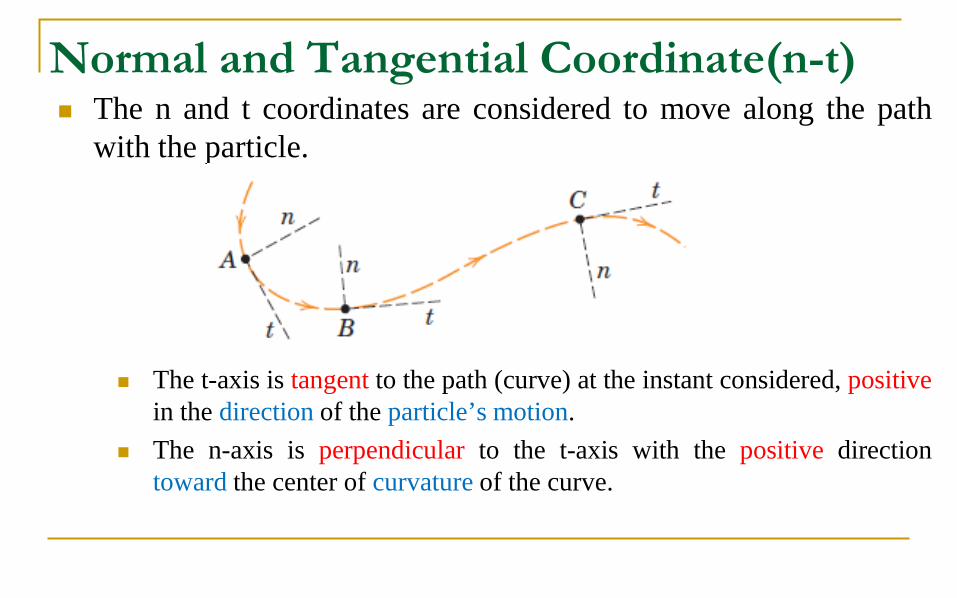
Normal and Tangential Coordinate(n-t) The n and t coordinates are considered to move along the path
with the particle.
The t-axis is tangent to the path (curve) at the instant considered, positivein the direction of the particle’s motion.
The n-axis is perpendicular to the t-axis with the positive directiontoward the center of curvature of the curve.

The coordinate n and t will now be used to describe the velocity vand acceleration a.
Similarly to the unit vectors i and j introduced forrectangular coordinate system, unit vectors for t-ncoordinate system can be used.
For this purpose we introduce unit vector et in the t-direction en in the n-direction.
et - directed toward the direction of motion. en-directed toward the center of curvature of the
path.

During the differential increment of time dt, the particle movesa differential distance ds along the curve from A to A’.
With the radius of curvature of the pathat this position designated by ρ, we seethat
ds = ρdβ, β is in radians
Velocity
Since it is unnecessary to consider the differentialchange in between A and A’,
dtd
dtd
dtdsvv βρβρ
====
ρ
.......(1)t tv ve eρβ= =

Acceleration The acceleration is a vector which reflects both the change in
magnitude and the change in direction of v.
Now differentiate the velocity by applying the ordinary rule (chain rule)for the differentiation of the product of a scalar and a vector.
Where the unit vector et now has a derivative because its directionchanges.
( )tvedtd
dtdva ==
( )••
+=
+===
tt
ttt
eveva
dtdeve
dtdvve
dtd
dtdva

To find the derivative of consider the following figure Using vector addition
e’t = et + ∆et
Since the magnitude | e’t |= | et | = 1
The direction of e’t and et are different
The direction of is given by
Or dividing by dt
dtdet
t tde e d dθ θ= =
tde ne
t t n nde de e d eθ= =
tn
de edθ
=
t nde d edt dt
θ=
t ne eθ=
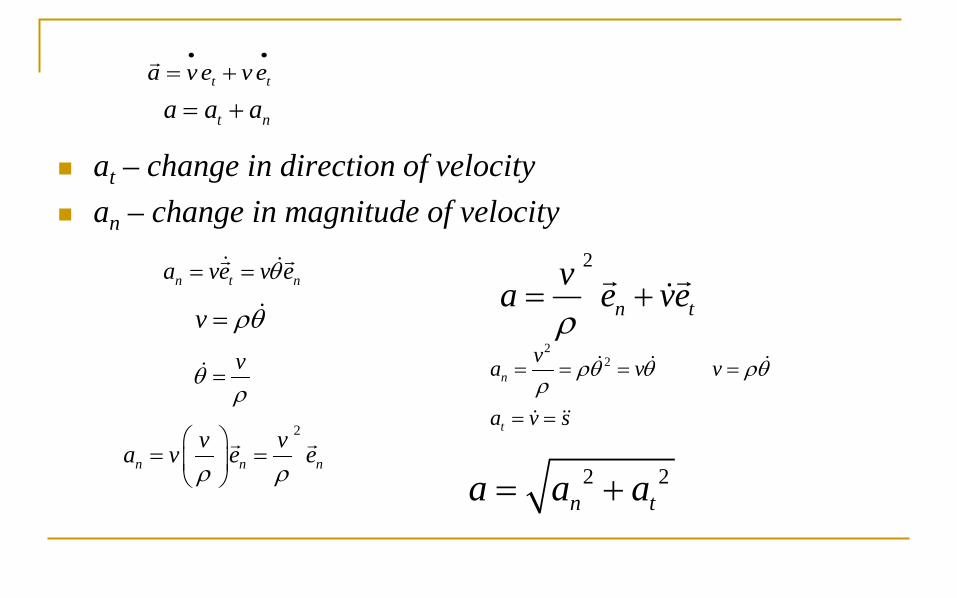
at – change in direction of velocity an – change in magnitude of velocity
••
+= tt eveva
t na a a= +
n t na ve v eθ= =
v ρθ=
vθρ
=
2
n n nv va v e eρ ρ
= =
2
n tva e veρ
= +
22 n
t
va v v
a v s
ρθ θ ρθρ
= = = =
= =
2 2n ta a a= +
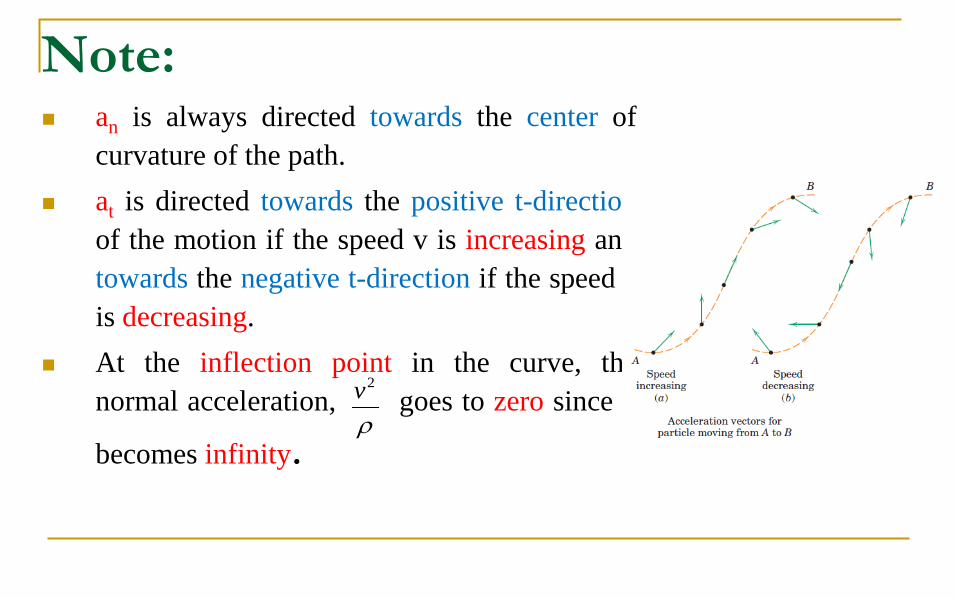
Note: an is always directed towards the center of
curvature of the path. at is directed towards the positive t-direction
of the motion if the speed v is increasing andtowards the negative t-direction if the speed vis decreasing.
At the inflection point in the curve, thenormal acceleration, goes to zero since ρ
becomes infinity.ρ
2v
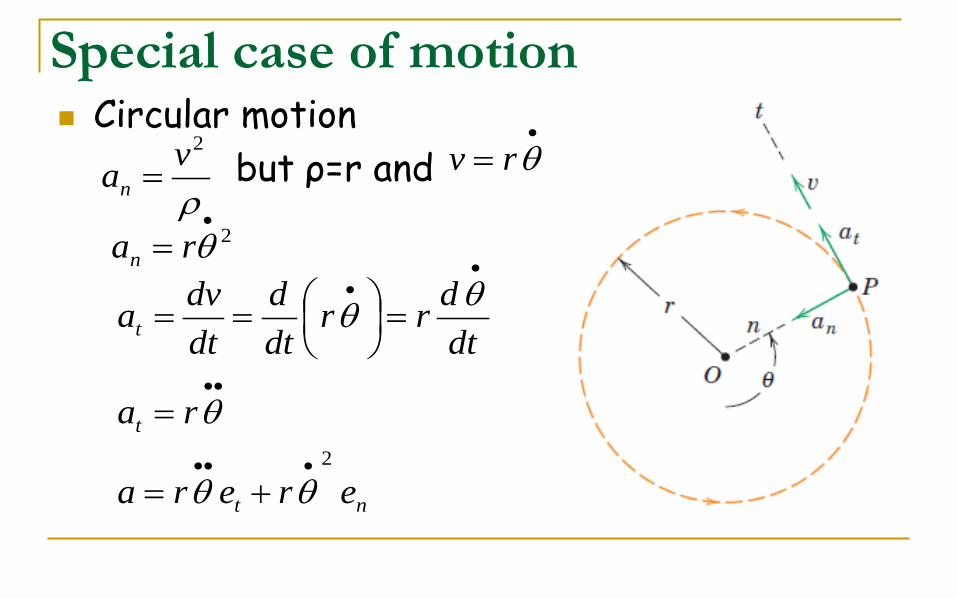
Special case of motion Circular motion
but ρ=r and ρ
2van =•
= θrv
2•
= θran
nt
t
t
erera
ra
dtdrr
dtd
dtdva
2•••
••
••
+=
=
=
==
θθ
θ
θθ
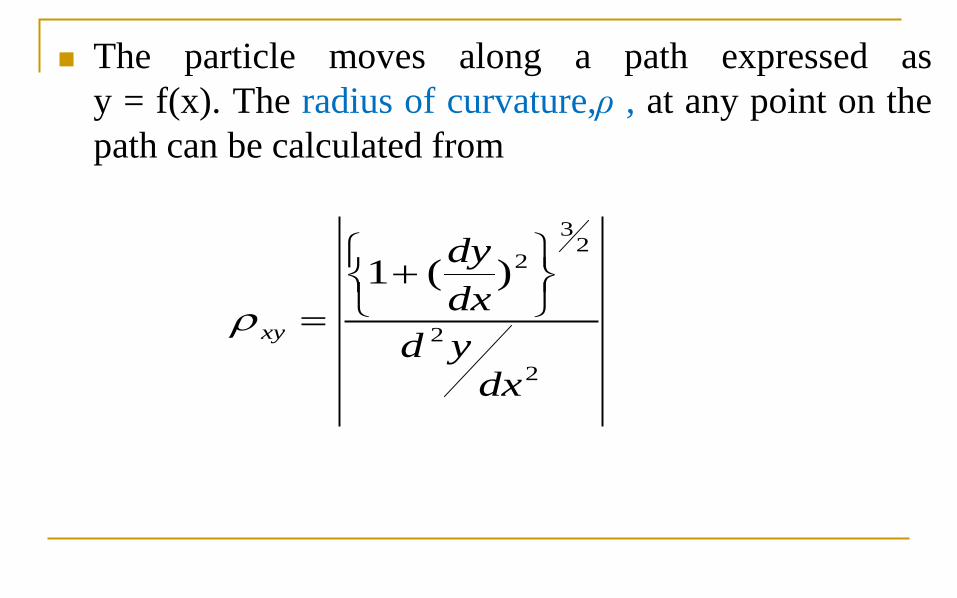
The particle moves along a path expressed asy = f(x). The radius of curvature,ρ , at any point on thepath can be calculated from
2
2
23
2)(1
dxyddxdy
xy
+
=ρ

Example
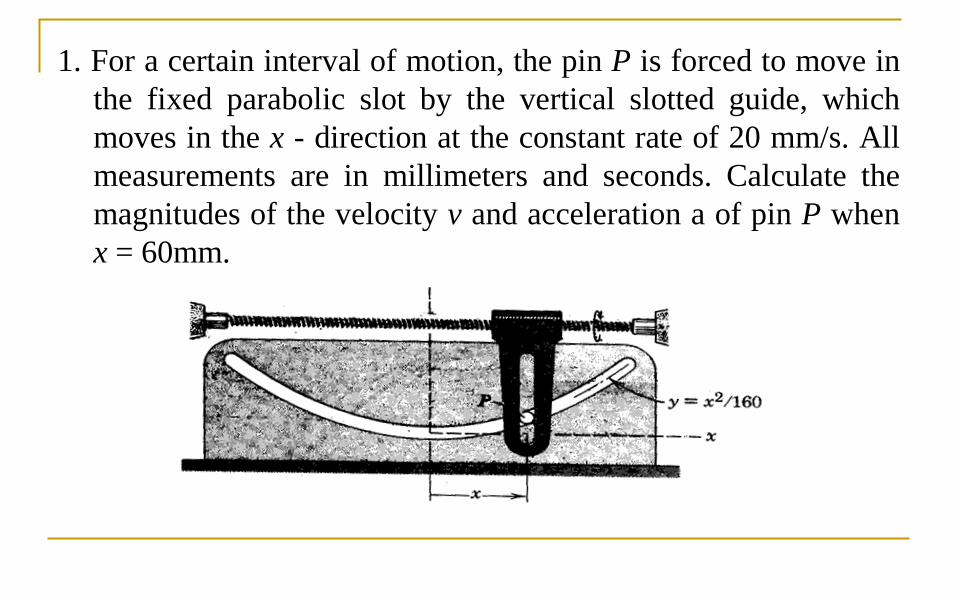
1. For a certain interval of motion, the pin P is forced to move inthe fixed parabolic slot by the vertical slotted guide, whichmoves in the x - direction at the constant rate of 20 mm/s. Allmeasurements are in millimeters and seconds. Calculate themagnitudes of the velocity v and acceleration a of pin P whenx = 60mm.

2. If the tennis player serves the ball with a velocity v of 130km/hat the angle θ=50, calculate the vertical clearance h of thecenter of the ball above the net and the distance s from the netwhere the ball hits the court surface. Neglect air resistance andthe effect of ball spin.

3. A projectile is launched with an initial speed of200 m/s at an angle of 600 with respect to thehorizontal. Compute the range R as measured upthe incline.
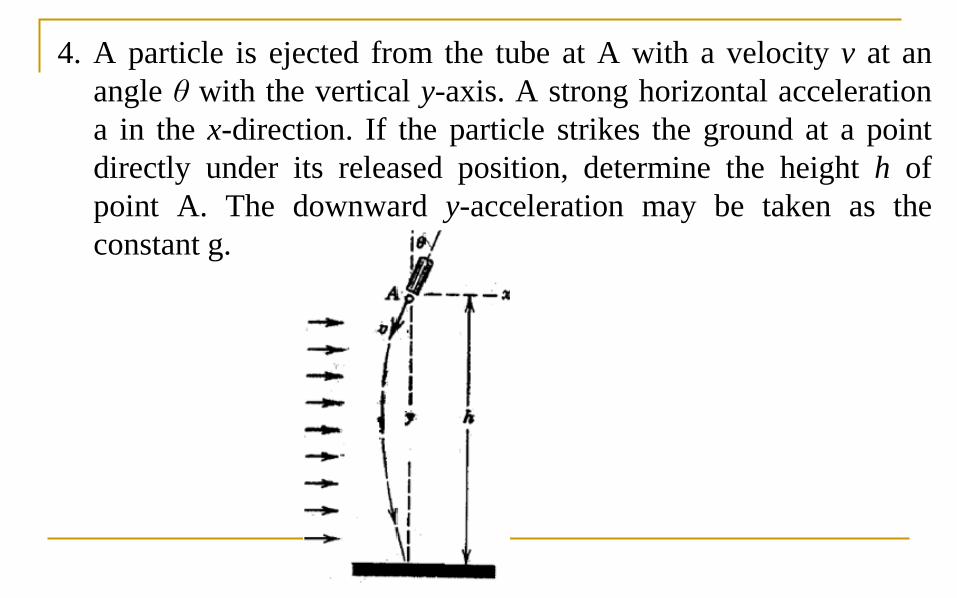
4. A particle is ejected from the tube at A with a velocity v at anangle θ with the vertical y-axis. A strong horizontal accelerationa in the x-direction. If the particle strikes the ground at a pointdirectly under its released position, determine the height h ofpoint A. The downward y-acceleration may be taken as theconstant g.

5. The motion of the pin A in the fixed circular slot is controlledby the guide B, which is being elevated by its lead screw witha constant upward velocity vo =2 m/s for an interval of itsmotion. Calculate both the normal and tangential componentsof acceleration of pin A as its passes the position for whichθ=300.

6. The pin P is constrained to move in the slotted guides whichmove at right angles to one another. At the instant represented,A has a velocity to the right of 0.2 m/s which is decreasing atthe rate of 0.75 m/s each second. At the same time, B ismoving down with a velocity of 0.15 m/s which is decreasingat the rate of 0.5 m/s each second. For this instant determinethe radius of curvature ρ of the path followed by P. Is itpossible to also determine the time rate of change of ρ?

Curvilinear Motion
Polar coordinate system (r- ѳ)

Polar coordinate(r- ѳ) Where the particle is located by the radial distance r from a
fixed pole and by an angular measurement ѳ to the radial line. Polar coordinates are particularly useful when a motion is
constrained through the control of a radial distance and anangular position,
or when an unconstrained motion is observed bymeasurements of a radial distance and an angular position.

An arbitrary fixed line, such as the x-axis, is used as a reference for themeasurement ѳ.
Unit vectors er and eѳ are established inthe positive r and ѳ directions,respectively.
The position vector to the particle at Ahas a magnitude equal to the radialdistance r and a direction specified by theunit vector er.
We express the location of the particle atA by the vector
rr re=

During time dt the coordinate direction rotate through the angle and the unit vectors also rotates through the same angle from and
dθ
' r re to e ' e to eθ θ
r rde e d dθ θ= =
r rde de eθ=
rde d eθθ=
de e d dθ θ θ θ= =
.de de eθ θ θ= −
rde d eθ θ= −
rde d edt dt θ
θ=
re eθθ=
rde d edt dtθ θ−=
re eθ θ= −

Velocity The velocity is obtained by differentiating the vector r
drvdt
=
( )rd redt
=
r rre re= +
r rv re re= +
, rbut e eθθ=
rv re r eθθ= +
r rv v e v eθ θ= +
rv r=
v rθ θ=
22θvvv r +=
= −
rvvθα 1tan

Acceleration Differentiating the expression for v to obtain the acceleration a.
But
i.e
( )rdv da v re r edt dt θθ= = = +
r ra re re r e r e r eθ θ θθ θ θ= + + + +
re eθ θ= −
re eθθ=
( ) ( )r ra re r e r e r e r eθ θ θθ θ θ θ θ= + + + + −
2r ra re r e r e r e r eθ θ θθ θ θ θ= + + + −
2( ) (2 )r ra r r e r r eθθ θ θ= − + +
ra a aθ= +
2
2ra r r
a r rθ
θ
θ θ
= −
= +
22θaaa r +=
= −
raaθφ 1tan
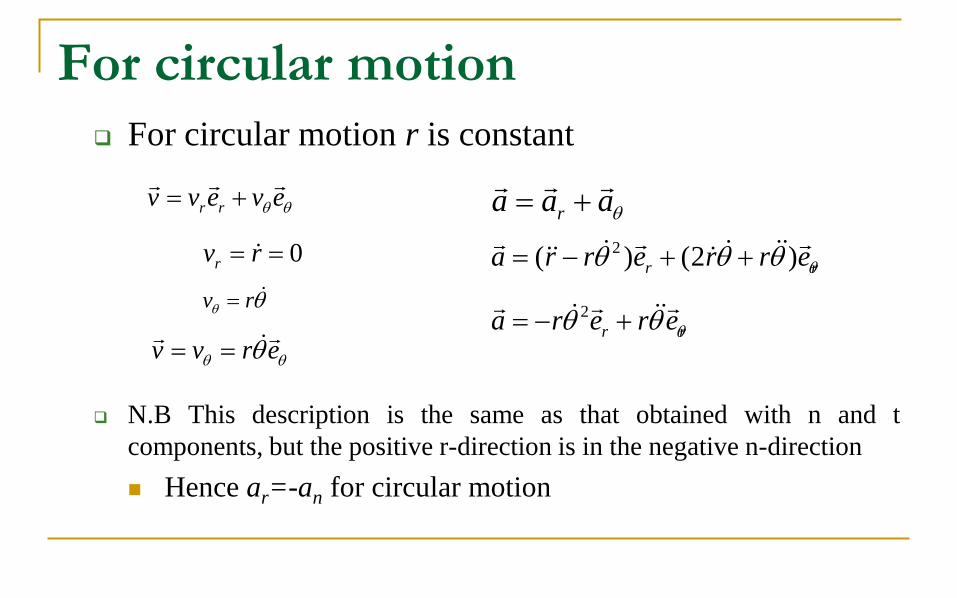
For circular motion For circular motion r is constant
N.B This description is the same as that obtained with n and tcomponents, but the positive r-direction is in the negative n-direction Hence ar=-an for circular motion
r rv v e v eθ θ= +
0rv r= =
v rθ θ=
v v r eθ θθ= =
ra a aθ= +
2( ) (2 )r ra r r e r r eθθ θ θ= − + +
2r ra r e r eθθ θ= − +
Example

1. The cam is designed so that the center of the roller A whichfollows the contour moves on a limaçon defined by ,where . If the cam does not rotate, determine the magnitudeof the total acceleration of A in terms of if the slotted armrevolves with a constant counterclockwise angular rate .
cosr b c θ= −
b c>θ
θ ω=

2. The fixed horizontal guide carries a slider and pin P whosemotion is controlled by the rotating slotted arm OA. If the armis revolving about O at the constant rate = 2 rad/s for aninterval of its designed motion, determine the magnitudes ofthe velocity and acceleration of the slider in the slot for theinstant when = 60°. Also find the r-components of thevelocity and acceleration.
θ
θ

3. During a portion of a vertical loop, an airplane flies in an arc ofradius with a constant speed . When theairplane is at A, the angle made by v with the horizontal is ,and radar tracking gives and .Calculate, for this instant .
600mρ = 400 /v km s=30oβ =
800r m= 30oθ =, , r rv v a andθ θ

Relative Motion (Translating Axes) If the motion analysis of a particle using coordinates which are
referred to a fixed reference system is said to be absolute motionanalysis.
If the motion analysis of a particle using coordinates which arereferred to a moving reference system is said to be relativemotion analysis.
Relative motion analysis : is the motion analysis of a particleusing moving reference system coordinate in reference to fixedreference system.
In this portion we will confine our attention to:- moving reference systems that translate but do not rotate. The relative motion analysis is limited to plane motion.

Consider two particles A and B that may have separatecurvilinear motion in a given plane or in parallel planes. X,Y : inertial frame of reference x,y : translating coordinate system
We will arbitrarily attach the origin of a set oftranslating (non-rotating) axes x-y to particle Band observe the motion A from our movingposition B.
The position vector A as measured relative to theframe x-y is
Where A/B means A relative to B
/A Br xi yj= +

The absolute position of A is determined by the vector
Velocity
Acceleration
/A B A Br r r= +
/( )AA B A B
dr dv r rdt dt
= = +
/A B A Br r r= +
/A B A Bv v v= +
/( )AA B A B
dv da v vdt dt
= = +
/A B A Bv v v= +
/A B A Ba a a= +
Note:- The observed coordinates system can be Rectangular Normal and tangential Polar
Therefore, the choice of any coordinates system depends onthe type of given conditions for the problem.

Example

1.

2.
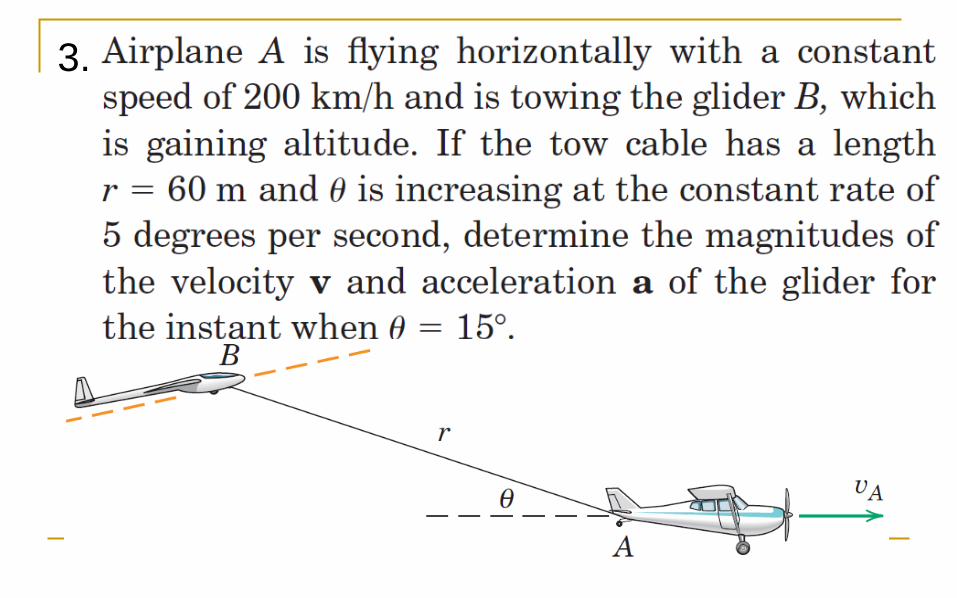
3.

4.
Constrained Motion of Connected Particles

Sometimes the position of a particle will depend upon the position ofanother or of several particles.
If the particles are connected together by an inextensible ropes, theresulting motion is called constrained motion.
The motion of A is twice the vertical motion B. One degree of freedom (only one variable is needed to
specify the position of all parts of the system). Circumference of the circle
Total length of the cable is
But L,r2, r1, and b are all constant Velocity
OR
Acceleration OR
2C rπ= 1/ 2C rπ= 1/ 42rC π
=
212
2rL x y r bπ π= + + + +
21( ) ( 2 )
2rd dL x y r b
dt dtπ π= + + + +
0 2x y= + 0 2A BV V= +2x y= −
2A BV V= −
0 2x y= +
2x y= −
0 2A Ba a= +2A Ba a= −
The velocity of A have a sign which opposite to that of the velocity of B.
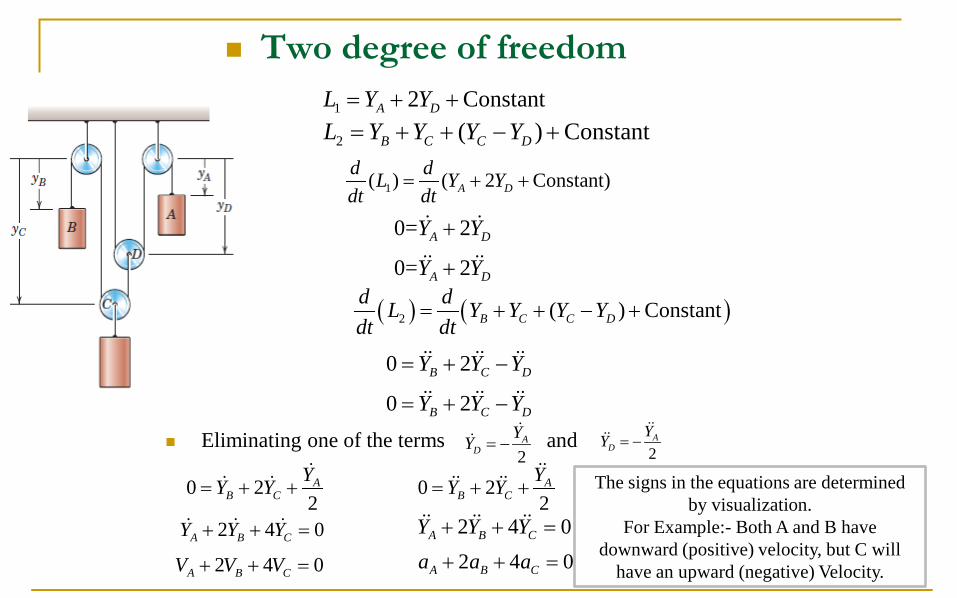
Two degree of freedom
Eliminating one of the terms and
1 2 ConstantA DL Y Y= + +
2 ( ) ConstantB C C DL Y Y Y Y= + + − +
1( ) ( 2 Constant)A Dd dL Y Ydt dt
= + +
0= 2A DY Y+
0= 2A DY Y+
( ) ( )2 ( ) ConstantB C C Dd dL Y Y Y Ydt dt
= + + − +
0 2B C DY Y Y= + −
0 2B C DY Y Y= + −
2A
DYY = −
2A
DYY = −
0 22A
B CYY Y= + +
2 4 0A B CY Y Y+ + =
2 4 0A B CV V V+ + =
0 22A
B CYY Y= + +
2 4 0A B CY Y Y+ + =
2 4 0A B Ca a a+ + =
The signs in the equations are determined by visualization.
For Example:- Both A and B have downward (positive) velocity, but C will
have an upward (negative) Velocity.

Example

1.

2.

3.