la recherche en robotique médicale au japon
DESCRIPTION
La recherche en robotique médicale au JaponTRANSCRIPT
Medical Robotics Research in Japan
Ichiro SakumaBiomedical Precision Engineering Lab.,Graduate School of Frontier Sciences,
The University of Tokyo,
2005/06/25
Biomedical Precision Engineering Lab. #2
Medical Robotic Study in Japan
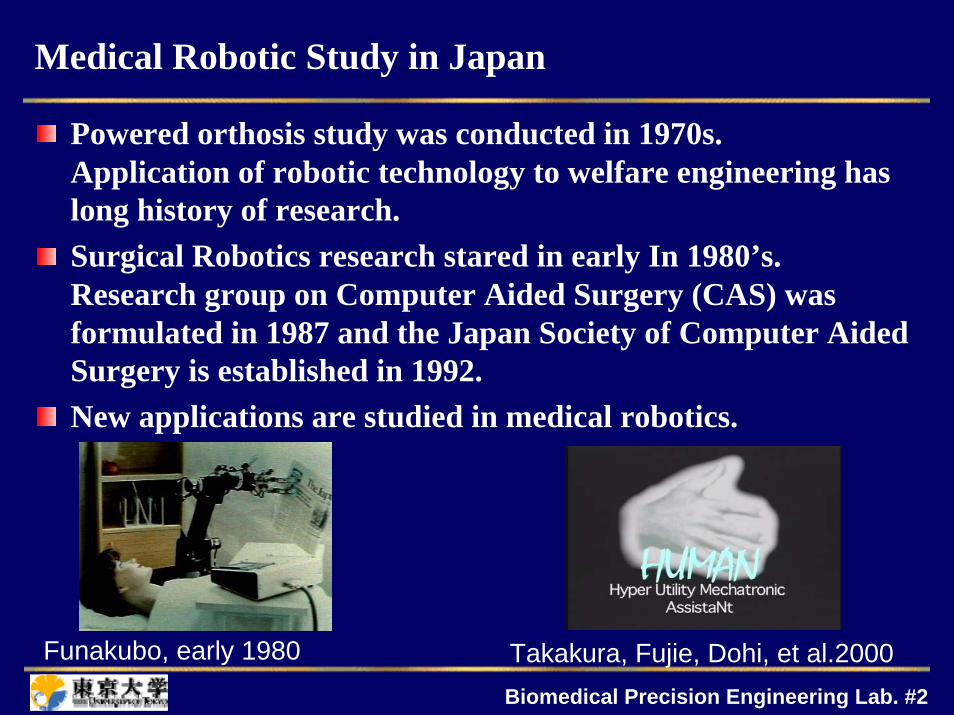
Powered orthosis study was conducted in 1970s.Application of robotic technology to welfare engineering has long history of research.Surgical Robotics research stared in early In 1980’s.Research group on Computer Aided Surgery (CAS) was formulated in 1987 and the Japan Society of Computer Aided Surgery is established in 1992.New applications are studied in medical robotics.
Funakubo, early 1980 Takakura, Fujie, Dohi, et al.2000
Biomedical Precision Engineering Lab. #3
Academic Activities of Medical robotics
Examples:89 papers among papers 887 papers at 2005 Annual Meeting on Robotics-Mechatronics of Japan Society for Mechanical Engineers,
Annual meeting on JSCAS (Japan Society of Computer Aided Surgery) 25/122 in 2003, 30/126 in 2004
Many plenary programs on robotics in medical academic societies such as Endoscopic Surgery Society of Japan, Japan Society of Orthopedic Surgery, and etc.
Biomedical Precision Engineering Lab. #4
Assistive technology and welfare engineering
Robotics for rehabilitation
Robotics for augment human physical capability
Robotics for care Environmental control system
Biomedical Precision Engineering Lab. #5
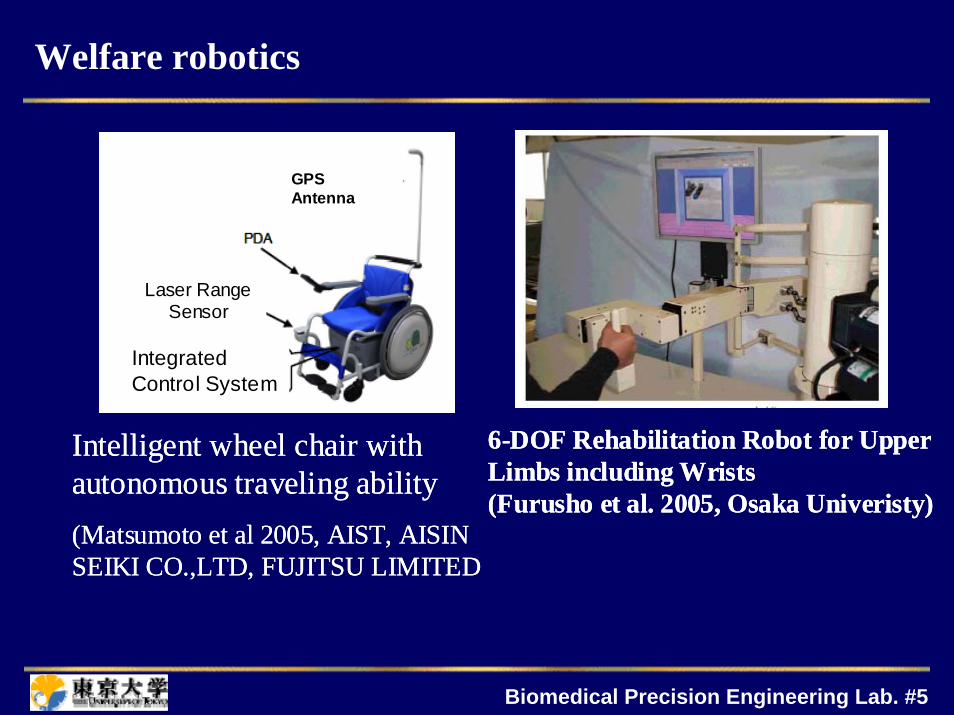
Welfare robotics
Intelligent wheel chair with autonomous traveling ability(Matsumoto et al 2005, AIST, AISIN SEIKI CO.,LTD, FUJITSU LIMITED
GPS Antenna
Laser Range Sensor
Integrated Control System
Intelligent wheel chair with autonomous traveling ability(Matsumoto et al 2005, AIST, AISIN SEIKI CO.,LTD, FUJITSU LIMITED
GPS Antenna
Laser Range Sensor
Integrated Control System
6-DOF Rehabilitation Robot for Upper Limbs including Wrists (Furusho et al. 2005, Osaka Univeristy)
6-DOF Rehabilitation Robot for Upper Limbs including Wrists (Furusho et al. 2005, Osaka Univeristy)
Biomedical Precision Engineering Lab. #6
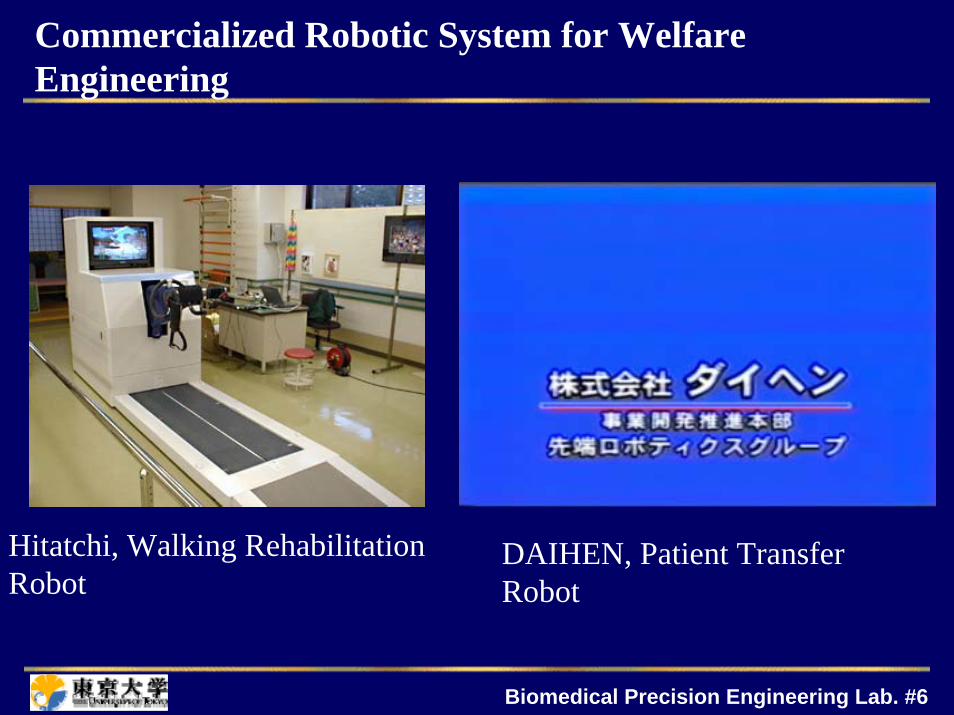
Commercialized Robotic System for Welfare Engineering
Hitatchi, Walking Rehabilitation Robot
DAIHEN, Patient Transfer Robot
Biomedical Precision Engineering Lab. #7
Surgical Robotics
Manipulator for Endosopic SurgeryBending forceps based on rigid linkage mechanism rather than wire driven mechanismIncorporation with surgical devicesIncorporation with flexible endoscopeMiniaturization of the system for neuro/fetus Surgery
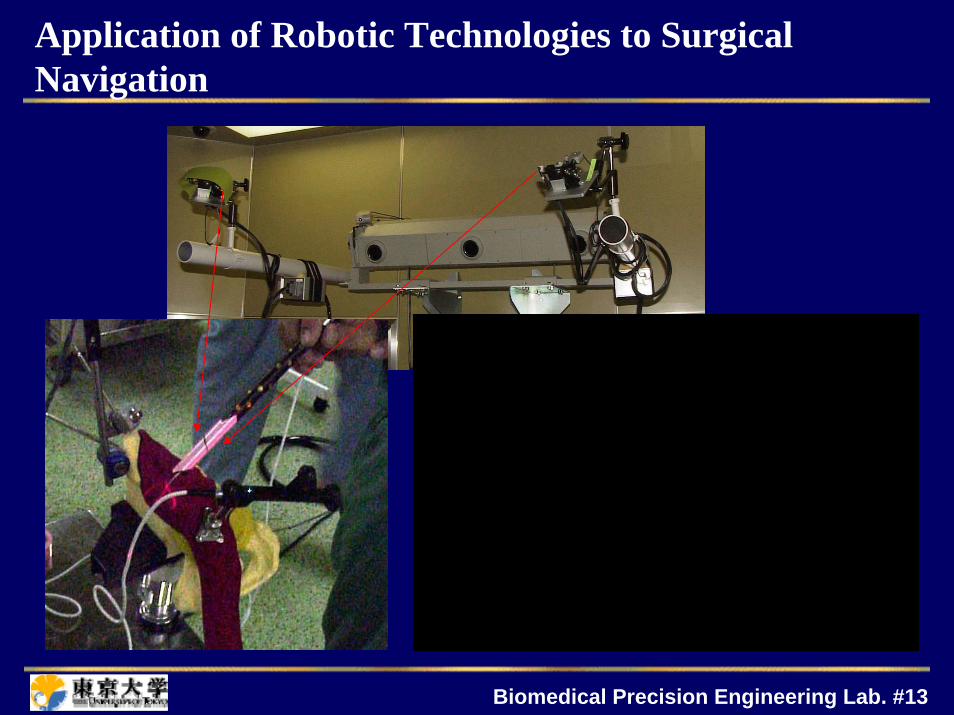
Application of Robotic Technologies to surgical navigationImage guidance of surgical robotRobotic technology for minimally invasive precision target therapy.Robotic technology for basic medical research
Biomedical Precision Engineering Lab. #8
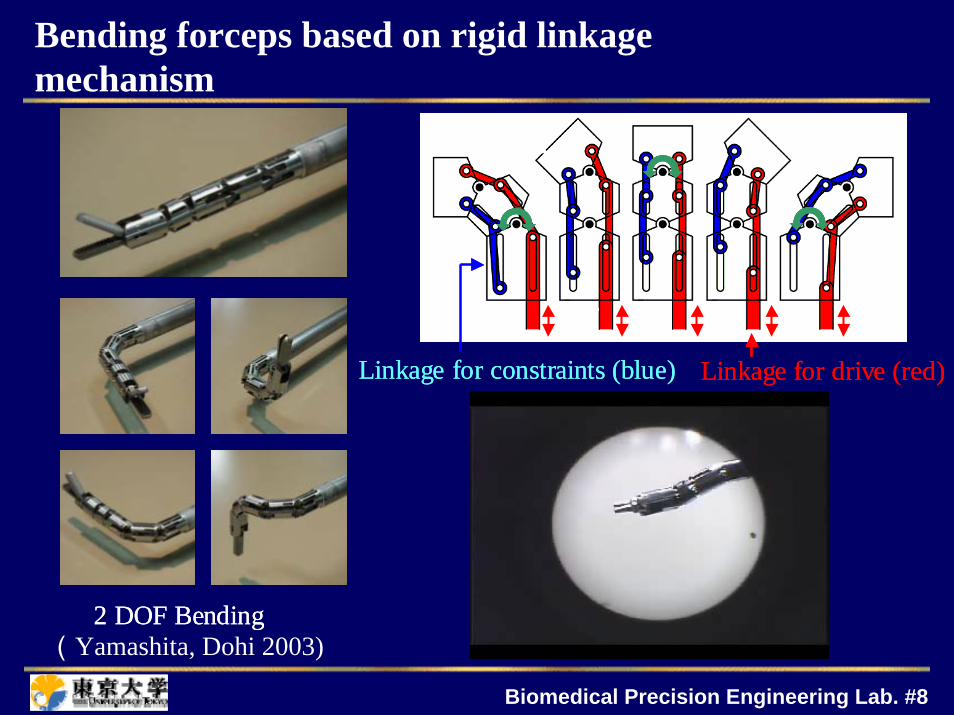
2 DOF Bending2 DOF Bending(Yamashita, Dohi 2003)
Linkage for constraints (blue) Linkage for drive (red)
0° -45° -90°+45°+90°
フレーム
Linkage for constraints (blue) Linkage for drive (red)
0° -45° -90°+45°+90°
フレーム
0° -45° -90°+45°+90°
フレーム
Bending forceps based on rigid linkage mechanism
Biomedical Precision Engineering Lab. #9
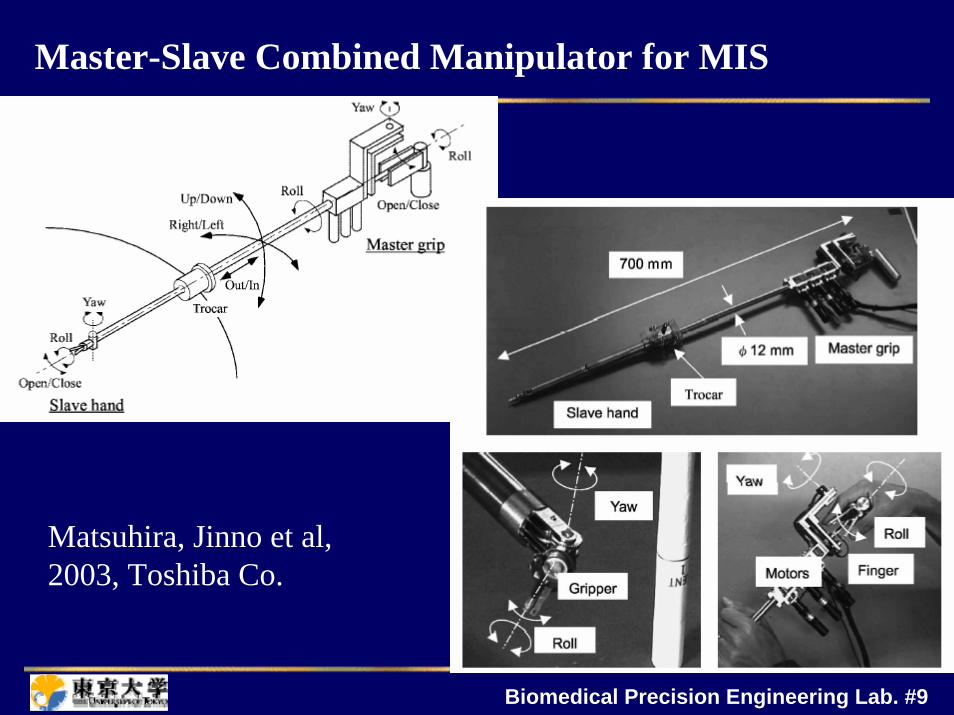
Master-Slave Combined Manipulator for MIS
Matsuhira, Jinno et al,2003, Toshiba Co.
Biomedical Precision Engineering Lab. #10
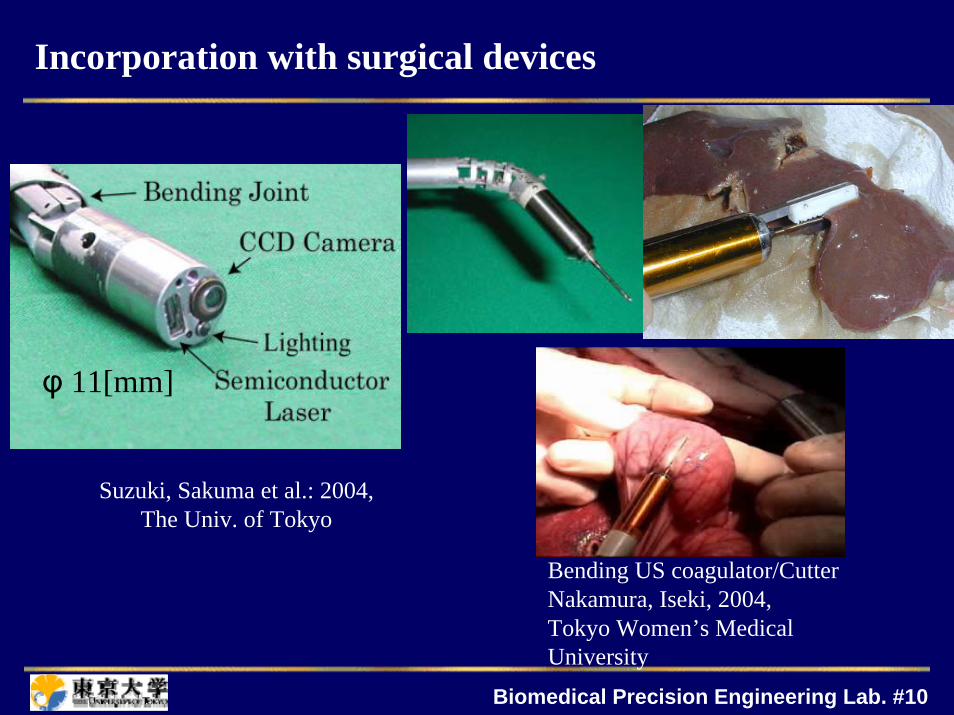
φ 11[mm]
Suzuki, Sakuma et al.: 2004, The Univ. of Tokyo
Incorporation with surgical devices
Bending US coagulator/CutterNakamura, Iseki, 2004, Tokyo Women’s Medical University
Biomedical Precision Engineering Lab. #11
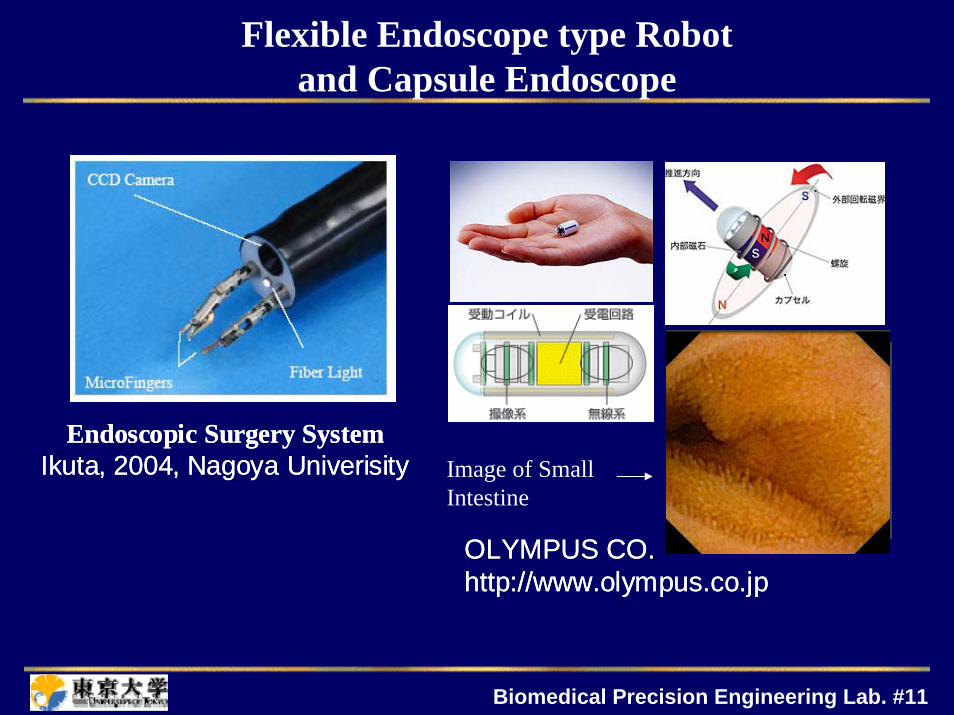
Endoscopic Surgery SystemIkuta, 2004, Nagoya Univerisity
Endoscopic Surgery SystemIkuta, 2004, Nagoya Univerisity
OLYMPUS CO. http://www.olympus.co.jpOLYMPUS CO. http://www.olympus.co.jp
Image of Small Intestine
Flexible Endoscope type Robot and Capsule Endoscope
Biomedical Precision Engineering Lab. #12
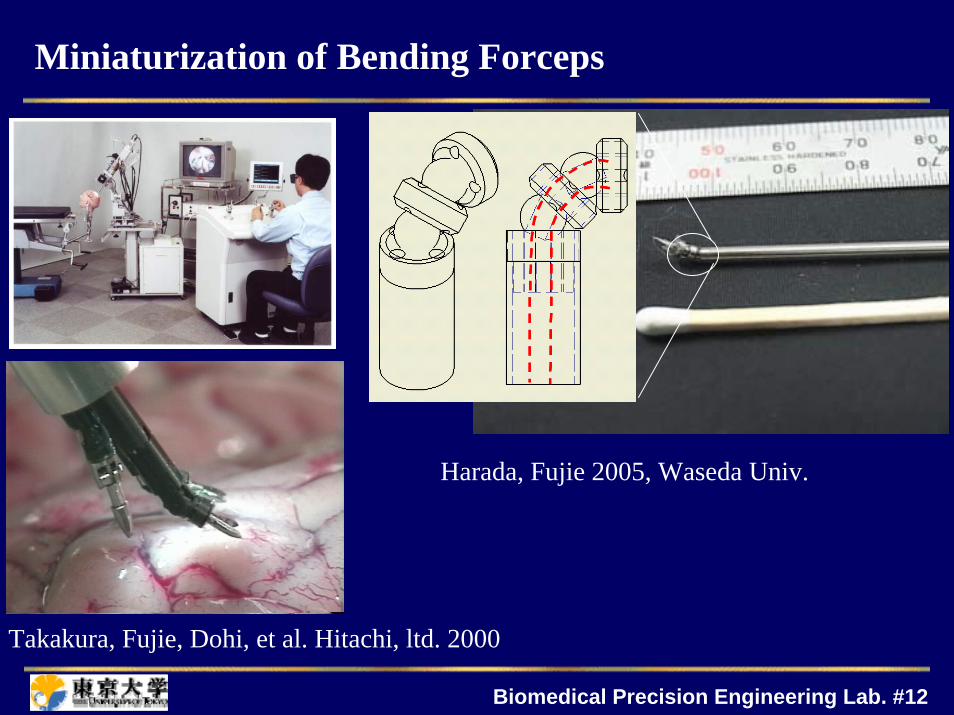
Harada, Fujie 2005, Waseda Univ.
Miniaturization of Bending Forceps
Takakura, Fujie, Dohi, et al. Hitachi, ltd. 2000
Biomedical Precision Engineering Lab. #13
Application of Robotic Technologies to Surgical Navigation
Biomedical Precision Engineering Lab. #14
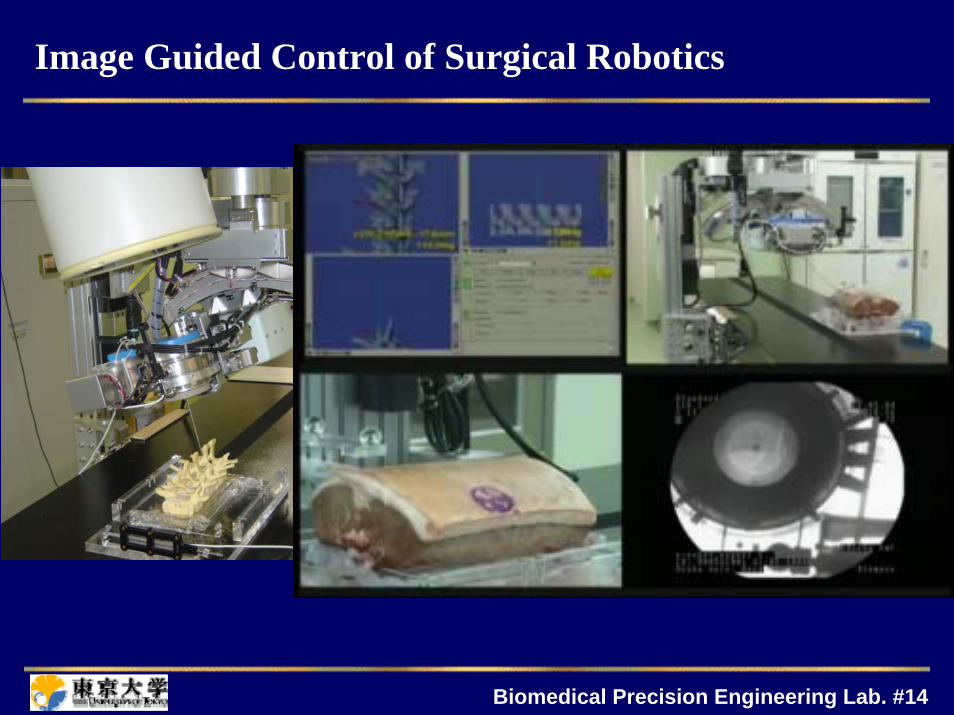
Image Guided Control of Surgical Robotics
Biomedical Precision Engineering Lab. #15
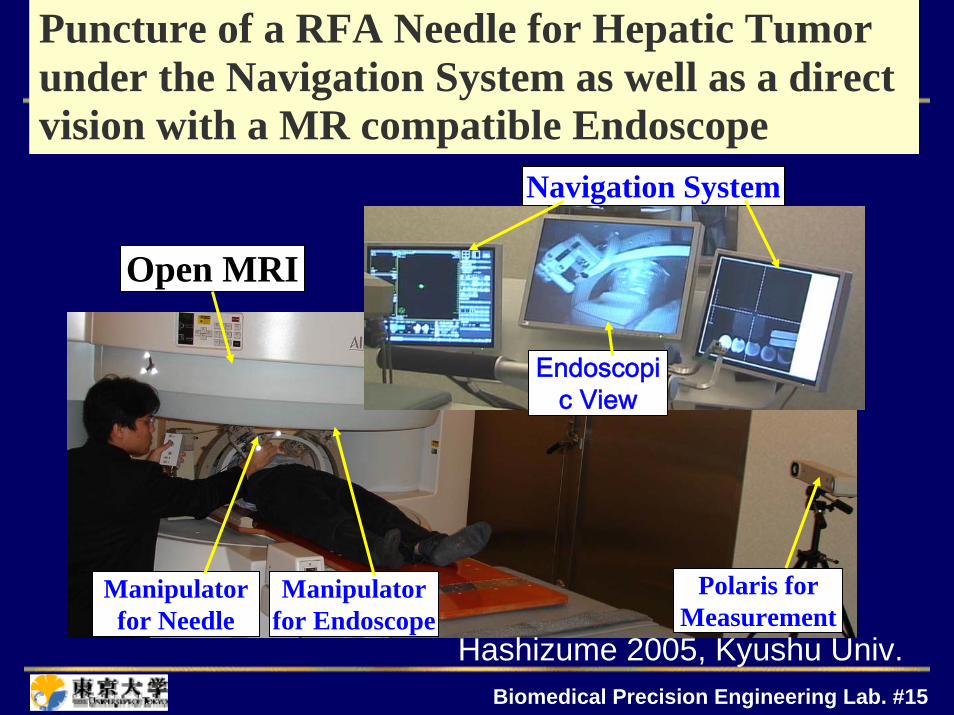
Puncture of a RFA Needle for Hepatic Tumor under the Navigation System as well as a direct vision with a MR compatible Endoscope
Endoscopic View
Navigation System
Polaris for Measurement
Manipulator for Needle
Manipulator for Endoscope
Open MRI
Hashizume 2005, Kyushu Univ.
Biomedical Precision Engineering Lab. #16
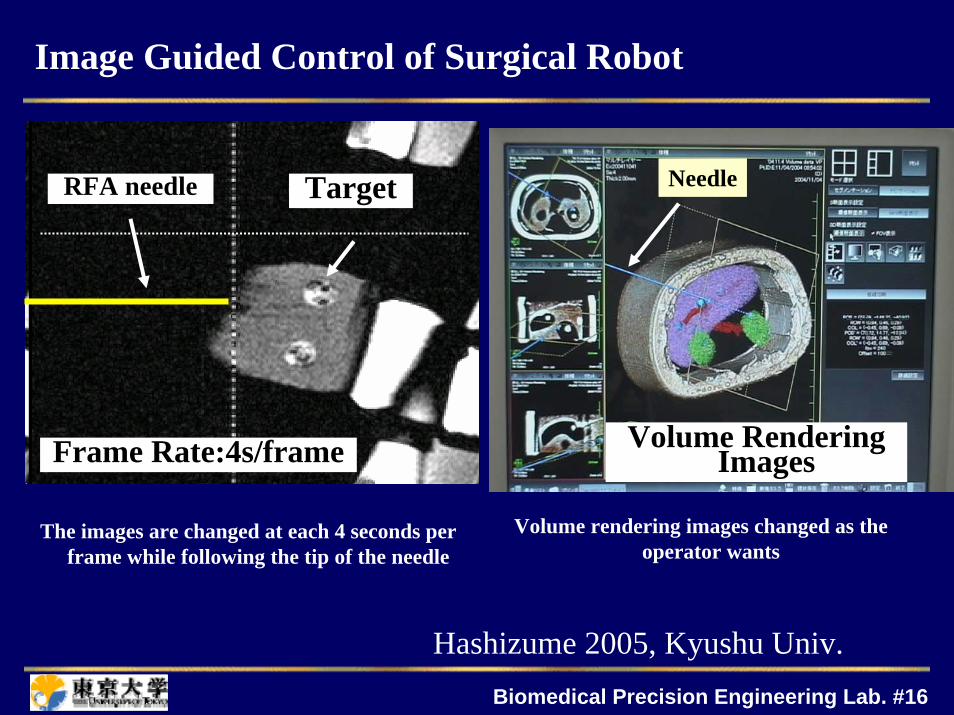
Volume Rendering Images
Volume rendering images changed as the operator wants
The images are changed at each 4 seconds per frame while following the tip of the needle
TargetRFA needle
Frame Rate:4s/frame
Needle
Image Guided Control of Surgical Robot
Hashizume 2005, Kyushu Univ.
Biomedical Precision Engineering Lab. #17
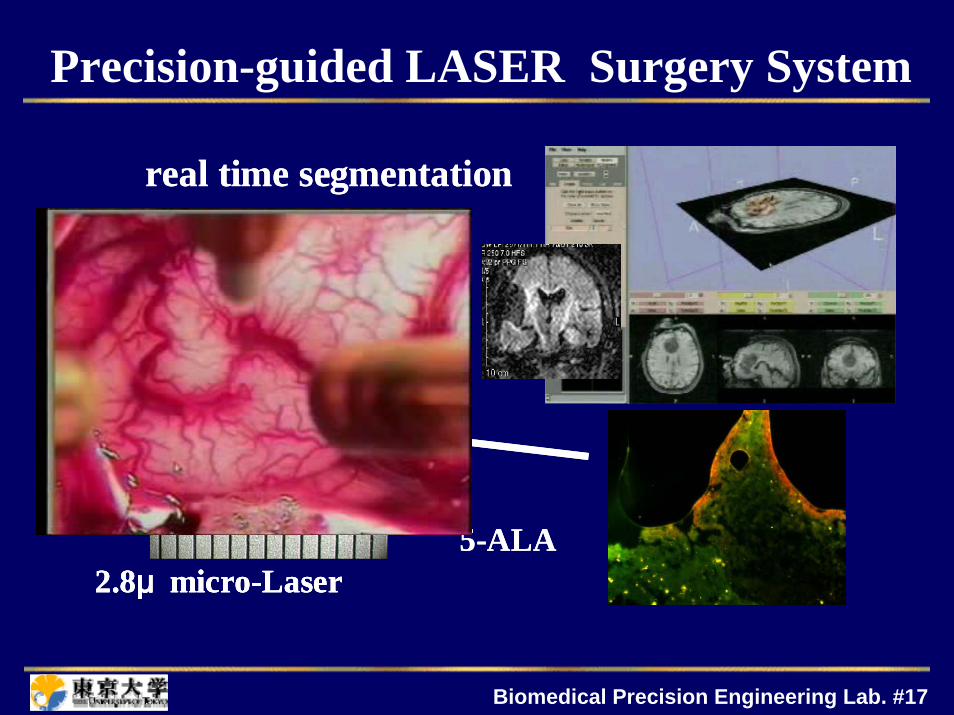
Precision-guided LASER Surgery System
real time segmentation
5-ALA2.8μ micro-Laser
log
real time segmentation
5-ALA2.8μ micro-Laser
log
2.8μ micro-Laser
log
Biomedical Precision Engineering Lab. #18
Research funding
Ministry of Science and TechnologiesBasic Research of medical robotics
Ministry of Economy Trade and IndustryFunding for Industries
Ministry of Welfare and LaborAiming for clinical application of medical robotics
Biomedical Precision Engineering Lab. #19
Problems in medical robotics application
Tight regulations by Ministry of Health and LaborsDaVinci surgical robot has not been yet approved as medical devices in Japan.Lack of risk assessment capability of medical robotics
Lack of engineering personnel to facilitate use of advanced technologies in hospital
Numbers of Ph.D. in engineering at hospitals are still limited in Japan.
Clinical use of medical robotics is still limited because of safety issues and medical insurance coverage.
Biomedical Precision Engineering Lab. #20
Actions for Medical Robotics Acceptance
Japan Industrial Robotic Association conducted researches on risk assessment of medical robotics.
Academic societies involving medical robotics started discussion on risk assessment and standardization.
Ministry of Economy Trade and Industry conducted pilot studies on personal robotics that interacts with human at Aichi EXPO 2005.
Ministry of Economy Trade and Industry and Ministry of Health and Labor started to establish guidelines for advanced medical devices for reduction of time and cost for approval as medical devices.
Biomedical Precision Engineering Lab. #21
Summary
In Japan, there are many active researches on medical robotics.Research grants are provided by several ministry of government depending on the stage of researches (basic/ industrialization/ clinical).Some commercially available products exists.There is tight regulation by ministry of health and labor.Clinical use of medical robotics is still limited because of safety issues and medical insurance coverage.Establishment of safety guideline and efficacy validation method is required to enhance application of robotics in clinical environment.