laboratory experiment 8: dc motor control€¦ · 8/5/2015 · laboratory experiment 8: dc motor...
TRANSCRIPT

Laboratory Experiment 8:
DC Motor Control
Presented to the University of California, San Diego
Department of Mechanical and Aerospace Engineering MAE 170
Prepared by Kimberly Nguyen, A05 Grace Victorine, A05
5/28/15

Abstract ______________________________________________ The purpose of this experiment was to explore the behavior, system gains, and feedback of a position control system. The control effort was determined to be proportional to gain, such that an increase in gain led to an increase in error. Calibration of the feedback potentiometer provided a linear fit indicating sensitivity of 0.086 V/degree. Calibrating the knob gain and calculated gain from measured resistance led to a 1:0.423 ratio, which is a 57.7% error from the theoretical 1:1 ratio. Investigation of the relationship between error and gain led to a results indicating that as gain increased, error voltage decreased. Then, an experimental trial was conducted to determine how useful the calibration of the feedback potentiometer was: the percent error in discrepancy between the predicted and experimental angles were 6.41% for +5V and 4.03% for -5V. Graphs in the final part of this experiment provided results indicating that when gain increased, oscillations increased at the feedback signal, op-amp, and motor drive, while steady state errors, rise times, and overshoot stayed relatively constant. As well, it was shown that as gain increased, the settling times for the op-amp and feedback signal were likewise increased. The settling time approached zero for the motor drive.
1

I. Introduction ______________________________________________ The DC Motor, or servo motor has been used widely to power all sorts of machines, from inkjet printers, to model airplanes, to communications satellites. DC motors function by converting voltage potential differences into mechanical energy. The internal mechanism causes periodic change in the current flow. Inside the motor and North and South designated magnets of opposite polarities. This internal rotation creates a torque that powers the motor. The servomechanism is composed of an actuator (usually a DC motor), a controller, and a sensor. The controller amplifies instrumentation, the driver is composed of two transistors, and the sensor is combined with the mechanical feedback structure in the potentiometer. The controller accepts two input voltages; the position command, or what is desired and the feedback voltage which is the actual voltage. Ideally, the two voltages should be equal so the instrument amplifier determines the difference between the two, called the error, and multiplies it by the gain to produce and output voltage known as the control effort. The control effort is applied to the resistors and results in motion of the motor. As the motion continues, the resulting feedback voltage is continuously fed to the control amplifier. This process is iterated in a closed loop to allow the system to arrive at and maintain the desired position. II. Theory ______________________________________________
Figure 1: Representation of Feedback Control System 1 Figure 2: Typical System Response to Step Change 1
Figure 1 depicted the feedback control system of the servomechanism. In order to calculate the voltage difference between the command and feedback voltages, the following equation was used:
ontrol Effort ain rror C = G * E ( 1) 1 The amplifier gain was determined by the following equation in which R G represented the gain resistor:
Gain =( 1+50/R G ) (2) 1
The Proportional-Integral-Derivative (PID) controller was characterised by the following equation with with K p as the Proportional gain, used to affect rise time, K p as the Integral gain, used to affect steady state error, K p as the Derivative gain, used to control overshoot, e as the Error = Set Point – Process Variable, and t
as with respect to time: (t) e(t) (t)dt e(t)u = Kp + K1∫t
0e + Kd ddt (3) 2
The PID function is illustrated in Figure 2. The rise time indicates the necessary elapsed time for the signal to reach the set point. The percent overshoot indicates the extent to which the signal originally surpasses the set point. The settling time is time it take for the signal to settle within some error of the set point. The steady-state error is the offset between the settled signal and the set point.
2

III. Experimental Procedures ______________________________________________
Part I: Sensor Verification and Calibration
Figure 3: Simplified Schematic of Control Board 1 Figure 4: Pictorial Control Board Schematic 1
Figure 3 depicted the simplified electronic schematic of the control board which detailed the individual components such as resistors, voltage supplies, transistors, gain resistors, and motor drives. Figure 4 delineated the layout of the physical board that was to be worked on and illustrated where to connect the desired wires in the first part of the experiment. In the first part of the experiment, the CMD mode switch was turned to “Manual” and “Power In” was attached to the control board with +15V, -15V and Gnd from the protoboard. The three potentiometer wires were attached to the 3-Position Feedback terminal. The DMM was used to measure the feedback voltage from the sensor. The driven wheel was turned fully counter clockwise and the resulting voltage as well as degrees indicated by the arrow were noted at test point 3. The measurement was repeated at 50-degree increments in the clockwise direction and data were recorded.
Part II: Calibration of the gain adjustment knob
Figure 5: Diagram of the Instrumentation Amplifier
Figure 5 delineated the setup of the instrument amplifier which was used in Part II of the experiment in order to determine the relationship between the gain control knob’s position and true gain. Power was turned off, then the multimeter was attached to the two white gain wires. The initial position to which the gain knob was set was “10”. Infinite resistance was registered at this point. subsequently decreasing resistances were registered at gain resistances that increased in increments of 10. Upon the recording of all resistances, the gain and resistance were plotted to a linear fit with the x-axis displaying the knob setting and the y-axis displaying the calculated gain.
3

III. Experimental Procedures (continued)
Part III: Error, Gain, and Control Effort
In Part III of the experiment, the effect gain on error size was analyzed. The power to the system was again turned off, and the motor connections were wired to the 2 position on the terminal block labeled motor. The two white gain wires were also connected to this position labeled gain resistor. The four command wires were attached at the 4 position terminal strip. Then the CMD switch was changed to the manual setting while the gain knob was placed at 30 for a gain of near 4. After switching the power on and rotating the manual knob to ensure the setup was operational, the manual knob was set to the center position. The gain knob was set to the 10 position and the DC volts function was selected on the DMM. The feedback voltage was measured from the potentiometer using this method. The large wheel was then rotated to observe the lighting of the green and red bulbs. The voltages at each point were recorded and the difference was calculated as the error voltage. The gain knob was rotated to 20 and the process was repeated for gains 20-100. The the data were plotted to a linear fit with gain on the x-axis and error on the y-axis.
Part IV: Gain & Error - Visualization
In Part IV of the experiment, the oscilloscope was implemented to assess the gain/error relationship. The oscilloscope was set to the initial settings of 5 volts/div and 100 ms/div with both channels on DC coupling modes. Both channel traces were positioned at the center of the screen. The orange motor terminal wire was disconnected and removed from the control board. The scope probes were used to clip channel 1 to test point 3 of feedback, while the channel 2 probe was clipped to test point 1, the amplifier. Both traces were brought to the center of the screen to overlay. The degree position of the wheel was recorded and used as the starting degree. The manual knob remained stationary for the remainder of Part IV to prevent errors. The wheel was then slowly rotated in the clockwise and counterclockwise directions to determine the position of the wheel for which the amplifier trace reached the minimum value. This value was recorded and the gain was increased to ~8. The process was then repeated to record the most negative value. This process was repeated at gains of 16, 24, and 32.The start degree readings were subtracted from the final degree readings to error in degrees. The data were then plotted to a linear fit with the gain on the x-axis and error on the y-axis.
Part V Dynamic Responses
In Part V of the experiment, the dynamic response of the system was analyzed using the amplifier output signal from the oscilloscope and the feedback signal. The orange motor wire previously set aside was reconnected, and a sine wave of 10Vpp and 2 Hz was input. The command mode was set to toggle and the switch to auto. The gain was set at 20 and the oscilloscope was implemented to monitor the input signal at test point 4 on channel 1 while test point 3 monitored feedback. Test point ground was used as a ground point and the linear fit equation was used to calculate to ideal wheel degrees at +5V and -5V. The degrees at each voltage extreme were then estimated manually. The frequency was then amped up 5 times to the -3dB frequency. A square wave was then input at 10Vpp and 0.2 Hz . The oscilloscope was adjusted and the command and feedback voltages were observed at higher and lower gains. Graphs were captured for analysis.
4

IV. Data and Results ______________________________________________
Part I: Sensor Verification and Calibration The calibration plot of degree and voltage correspond to a linear fit of slope 0.086. The sensitivity of the feedback potentiometer is therefore 0.086 V/degree. The R^2 value is 1. From this plot, we may predict the angles at which the voltage is +5 and -5. They are 57.1 and -59.1 degrees, respectively.
Figure 6: Calibration Plot of Degree vs. Voltage
Part II: Calibration of the gain adjustment knob The calibration plot of knob setting vs calculated gain using eqn (3) displayed as Figure 7 provides a linear fit of 0.596 with an R 2 of 0.811, which is not reasonable. Removing an outlier of (knob gain = 100, calculated gain = 67.8342), we have an R 2 of 0.977, which is far more reasonable. The linear fit of Figure 8 without the outlier provides a slope of 0.423, indicating a 1:0.423 ratio between knob setting and calculated gain.
Figure 7: Calibration Plot of Degree vs. Voltage Figure 8: Calibration Plot of Degree vs. Voltage
Part III: Error, Gain, and Control Effort
The following plot (Figure 9) displays knob gain vs. error voltage (green light voltage - red light voltage). The R 2 of the data is highest with an exponential decay fit at 0.893.
Figure 9: Knob gain vs. Error plot Part IV: Gain & Error - Visualization
The following plots (Figure 10 and Figure 11) display calculated gain vs. error voltage (green light voltage - red light voltage) with and without an outlier data point, respectively. The R 2 of the data with the outlier is 0.675, while without the outlier point of calculated gain = 67.8342 and error voltage = 0.1130 is is 0.823.
Figure 10: Calculated Gain vs. Error with Outlier Figure 11: Calculated gain vs. Error plot w/o Outlier
Part: V Dynamic Responses Voltage Predicted Angle Experimental Angle % Error Comments
+5V 57.16 53.5 6.41% Moderate error
-5V -59.12 -61.5 4.03% Moderate error
Table 1: Predicted and Experimental Angle Comparison Errors
5

IV. Data and Results (continued) TP 4 and 3
Figure 12: Gain = 2.00 Figure 13: Gain = 24.27 Figure 14: Gain = 32.00
The graphs above depict the corresponding gain setting and frequencies that label them. The input of channel 1 (blue) is at the command point, test-point 4 (TP4), and channel 2 (pink) is at the feedback signal (TP3). The behavior indicates that oscillation increases as gain increases. As well, overshoot, rise time, and steady state errors are constant throughout the gain changes.
TP 4 and 1
Figure 15: Gain = 2.00 Figure 16: Gain = 24.27 Figure 17: Gain = 32.00
The graphs above depict the corresponding gain setting and frequencies that label them. The input of channel 1 (blue) is at the command point, test-point 4 (TP4), and channel 2 (pink) is at the op-amp output (TP1). The behavior indicates that oscillation increases largely as gain increases. As well, overshoot, rise time, and steady state errors are constant throughout the gain changes. Settling approaches nonexistence.
TP 4 and 2
Figure 18: Gain = 2.00 Figure 19: Gain =24.27 Figure 20: Gain = 32.00 The graphs above depict the corresponding gain setting and frequencies that label them. The input of channel 1 (blue) is at the command point, test-point 4 (TP4), and channel 2 (pink) is at the motor drive (TP2). The behavior indicates that oscillation increases largely as gain increases. As well, overshoot, rise time, and steady state errors are constant throughout the gain changes. Settling approaches zero.
6

V. Discussion and Error Analysis ______________________________________________ In the first part of this experiment, a potentiometer was calibrated using angle and voltage data alongside a linear fit. The sensitivity was found to be 0.0817 V/degree. Using this sensitivity, angle predictions were made for +5V and -5V, which were 57.16 and -59.12 degrees, respectively. This resulted in a 6.41% error for +5V experimental angle of 53.5 degrees and a 4.03% error for the -5V experimental angle of -61.5 degrees (Table 1). Because no systematic method was used to determine experimental angles, it is likely that the minor discrepancies between the calculated angle and the experimental angle were due to human sight error. For the second part of this experiment, the gain knob was calibrated to the gain calculated from the measured resistance. With a notable outlier, the original fit of the gain knob resulted in a slope of 0.596, an R 2 of 0.811 (Figure 7). Without the outlier, the fit provided a slope of 0.423, resulting in a larger R 2 of 0.977, indicating higher level of linearity (Figure 8). The fit with the higher R 2 provides a sensitivity of 1:0.4298 V/degree. This is with consideration of a linear fit; however, upon closer inspection of the data (Table 3) and the schematic of the op-amps (Figure 5), the shifting pattern of the slopes at intervals appear to correspond to the addition of the gain of another amplifier. In which case, the outlier is not actually an outlier at all. In the third part of this experiment, it was noticeable that as gain increased, the error voltage exponentially decayed (Figure 9). Even more notable was the amplifier attempting to control the motor when the calculated control effort was high enough. The wheel was far more difficult to turn at higher gains. This was most likely due to the smaller errors required of systems to produce the necessary output voltage to turn the wheel. The force applied by the motor was theoretically higher when the potentiometer sensitivity was increased. The amplifier began trying to control the motor when the wheel was turned at a higher gain. The wheel was more difficult to turn as the gain increased. In the fourth part of this experiment, an oscilloscope was used to graphically explore the relationship between gain and error. Exponential decay behavior was observed in the graphs of part four (Figure 12-20), indicating a decrease in error as calculated gain increased. This was theoretically due to the potentiometer, which reacts more sensitively to higher gains than lower ones, thus resulting in smaller errors. In the final part of this experiment, the linear fit from data in the first part of this experiment was used to predict the angle of displacement in the potentiometer, whose error was discussed previously. In addition, the -3dB frequency was calculated to be 5.69 Hz. At a frequency was 28.45 Hz, which is 5 times that of the -3dB, the motor stopped responding to the command signal. This was likely due to the frequency being too high, a situation which reasonably may lead to loss of control over the movement of the wheel. The limiting factor would then be the frequency response. From the screenshots captured, it was concluded that as gain increased, rise times, overshoot, and steady state errors stayed relatively constant while oscillations for the motor drive, op-amp, and feedback signal increased. As well, it was shown that as gain increased, the settling times for the op-amp and feedback signal were increased. The settling time approached zero for motor drive.
7

VI. Conclusions ______________________________________________ Ultimately, this experiment demonstrates that the PID controller utilizing a DC motor operates successfully to determine and correct for error in position placement. The drawback is that its specificity is heavily reliant on the precision of the DC motor. As demonstrated in Part III of the experiment, increases in gain result in decreases in error. However, as seen in Part V, this decrease in error corresponds with oscillations for the motor, op-amp, and feedback signal all increased. This could mar the quality of the signal, potentially negating the benefit of reduced error. This precision is key in designing an ideal PID controller that is able to posit to the specificity desired.
8

VII. References ______________________________________________
1. Nicholas Busan, Steve Roberts, and Rahul Kapadia. “Experiment 8A/B: DC Motor Control.” (2013). UCSD MAE 170. Web. 19 May. 2015. < http://mae170.eng.ucsd.edu/lab-procedures >
2. Joon Lee. “MAE 170 Lecture 8: Introduction to Position Control.” (2015). UCSD MAE 170. Web. 18 May. 2015. < http://mae170.eng.ucsd.edu/course-lectures >
9
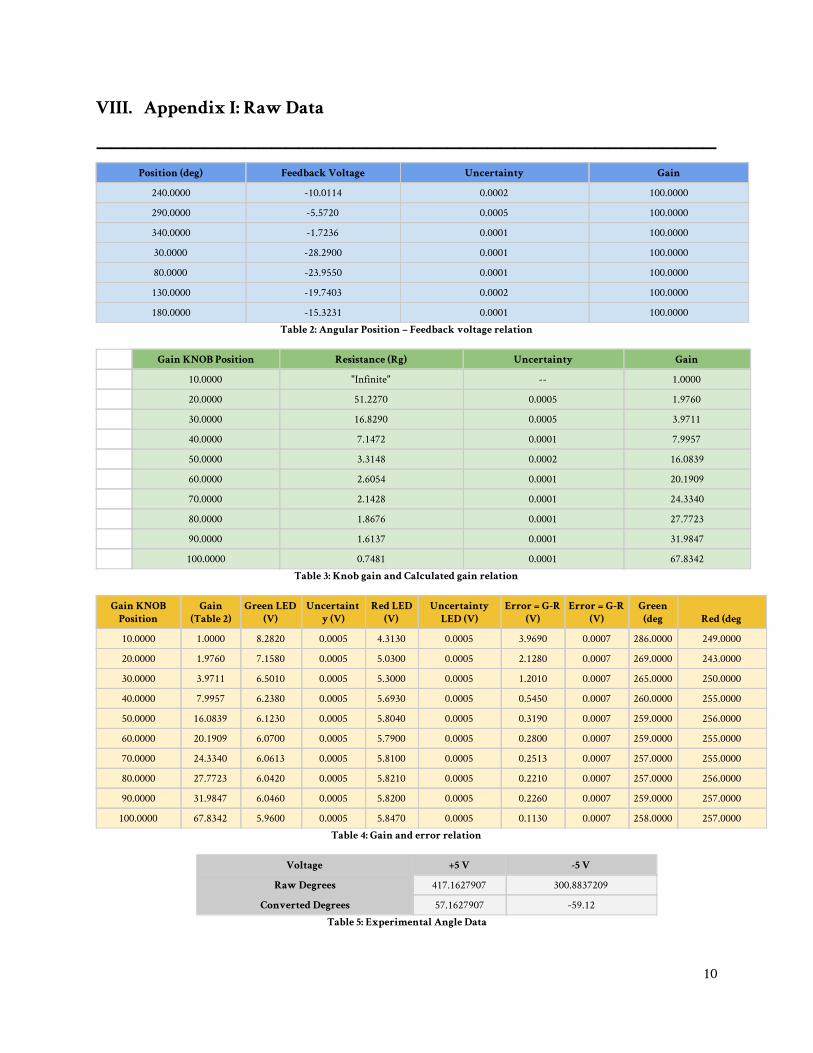
VIII. Appendix I: Raw Data ______________________________________________
Position (deg) Feedback Voltage Uncertainty Gain
240.0000 -10.0114 0.0002 100.0000
290.0000 -5.5720 0.0005 100.0000
340.0000 -1.7236 0.0001 100.0000
30.0000 -28.2900 0.0001 100.0000
80.0000 -23.9550 0.0001 100.0000
130.0000 -19.7403 0.0002 100.0000
180.0000 -15.3231 0.0001 100.0000 Table 2: Angular Position – Feedback voltage relation
Gain KNOB Position Resistance (Rg) Uncertainty Gain
10.0000 "Infinite" -- 1.0000
20.0000 51.2270 0.0005 1.9760
30.0000 16.8290 0.0005 3.9711
40.0000 7.1472 0.0001 7.9957
50.0000 3.3148 0.0002 16.0839
60.0000 2.6054 0.0001 20.1909
70.0000 2.1428 0.0001 24.3340
80.0000 1.8676 0.0001 27.7723
90.0000 1.6137 0.0001 31.9847
100.0000 0.7481 0.0001 67.8342 Table 3: Knob gain and Calculated gain relation
Gain KNOB Position
Gain (Table 2)
Green LED (V)
Uncertainty (V)
Red LED (V)
Uncertainty LED (V)
Error = G-R (V)
Error = G-R (V)
Green (deg Red (deg
10.0000 1.0000 8.2820 0.0005 4.3130 0.0005 3.9690 0.0007 286.0000 249.0000
20.0000 1.9760 7.1580 0.0005 5.0300 0.0005 2.1280 0.0007 269.0000 243.0000
30.0000 3.9711 6.5010 0.0005 5.3000 0.0005 1.2010 0.0007 265.0000 250.0000
40.0000 7.9957 6.2380 0.0005 5.6930 0.0005 0.5450 0.0007 260.0000 255.0000
50.0000 16.0839 6.1230 0.0005 5.8040 0.0005 0.3190 0.0007 259.0000 256.0000
60.0000 20.1909 6.0700 0.0005 5.7900 0.0005 0.2800 0.0007 259.0000 255.0000
70.0000 24.3340 6.0613 0.0005 5.8100 0.0005 0.2513 0.0007 257.0000 255.0000
80.0000 27.7723 6.0420 0.0005 5.8210 0.0005 0.2210 0.0007 257.0000 256.0000
90.0000 31.9847 6.0460 0.0005 5.8200 0.0005 0.2260 0.0007 259.0000 257.0000
100.0000 67.8342 5.9600 0.0005 5.8470 0.0005 0.1130 0.0007 258.0000 257.0000 Table 4: Gain and error relation
Voltage +5 V -5 V
Raw Degrees 417.1627907 300.8837209
Converted Degrees 57.1627907 -59.12 Table 5: Experimental Angle Data
10