leadership in location technology - stanford … a short history of gps 1973 defense navigation...
TRANSCRIPT

Leadership inLocation Technology
Location Anywhere, AnytimeGreg Turetzky for Stanford EE380
4/19/06

2
Is Location Important?Is Location Important?

3
Huge Growth in Mass Market Devices
AutomotiveAutomotive Mobile PhoneMobile Phone
ConsumerConsumer Mobile ComputeMobile Compute

4
From “Where am I?” to “Where are you?”

5
Future Products (?)
make sure you will never be forgottenforget-me-not panties™ have built-in GPS and unique sensor technology giving you the forget-me-not advantage.
protect her privatesEver worry about your wife cheating?
Want to know where your daughter is late at night?
Need to know when your girlfriend's temperature is rising?

6
Early Satellite Navigation
• TRANSIT Doppler– (aka Navsat)
• 1960 -1996• Polar Orbits
– 1100 Km– 106 minutes
• 5 to 10 Satellites– Observe multiple
measurements off of 1 Satellite
Primarily used by Polaris submarines to reset their inertial guidance systems.

7
A Short History of GPS
1973 Defense Navigation Satellite System (DNSS) passes Defense Systems Acquisition Review Council (DSARC)
1978 (Feb 22) PRN #1 Successfully Launched
1970
2000
1980
1990
1982 GLONASS #1 Launched
1990 Selective Availability Activated
1994 GPS Declared fully active
•1994 – FAA awards contract for Wide Area Augmentation System (WAAS) 1995 – SiRF Started
1986 – Motorola 4 Channel Eagle ($19K, 22 W)Q
2004 SiRF surpasses 10MU

8
GPS - SPACE SEGMENT
• 24 satellites + 3 active spares• 6 orbital planes at 55°, 12 hour orbits, 20,000 km
nominal altitude
• Free worldwide coverage • Continuous signal - all weather
• L1 = 1575.42 MHz, L2=1227.6 MHz• PRN C/A (L1) and P (L1 & L2)
• Continuous navigation message (satellite ephemeris and almanac data)
• Measurement Data – Pseudo-range (distance to the Sv)– Carrier phase (wavelengths )

9
GPS Satellite
GPS Antenna right-hand Circular Polarized (60W)
“Event”Detector
Uplink Antenna
Power CellsPositioning Thrusters
Q

10
GPS Block IIR-M
• Second Civilian Signal– More Accuracy– 1.1m
• 1st Launch 2005• On line in 2010

11
GPS Signals: Present and Future
L5ARNS/RNSS Band
L1ARNS/RNSS Band
L2RNSS Band
P(Y)
C/A
L2CM
L5
L1C
Current GPSDual Frequency w/
Semi-codeless P(Y)
Block IIR-MLaunch 2005Dual Frequency L1 C/A & L2C
Block IIFLaunch 2007Three Frequency L1 C/A, L2C, & L5
Block IIILaunch 2013
L1C, L2C, L5, & L1 C/A Code

12
GPS at L1
-95
-90
-85
-80
-75
-70
-65
-60
-55
-20 -15 -10 -5 0 5 10 15 20
Offset from 1575.42 MHz Center Frequency (MHz)
Pow
er S
pect
ral D
ensi
ty
(dB
W/H
z) R
elat
ive
to 1
Wat
t L1 C/A
L1 P(Y)
L1 M
L1C

13
WAAS - Integrity & Accuracy
Roughly 4x per year a GPS SV Goes “Unhealthy”–WASS: 6 second alert for unhealthy SV–GPS: 30 minute alert for unhealthy SV via GPS system

14
Signal Attenuation - How much?
• Forests: Large range (foliage type, humidity, trunks)• Residential houses - up to 30 dB• Commercial buildings: variable, in excess of 40 dB• Non-homogeneous attenuation exacerbate multipath
Transmitter
Reflected signal
ŅAttenuateddirect signalÓ
UserAbsorbed signal
Correct Range
Path of least resistance
Courtesy of Prof. LaChapelle at U of Calgary

15
If the signal is too small to see in 1 msec, we must narrow the receive bandwidth. Coherent integration is the first choice technique.
#5 High Sensitivity GPS
Adapted from Darius Plausinaitis, Aalborg Univ. [email protected]

16
A-GPS: more useful, more often
Assisted GPS – Ephemeris, Differential Corrections, Time, and Frequency

17
Galileo System
• Global Navigation Satellite System built by European Union – Operational 2008– The first Galileo test satellite – GIOVE-A was
launched on Dec.28, 2005– First navigation signals were transmitted by
GIOVE-A on Jan.12, 2006• Interoperable with GPS• 30 satellites in three Medium Earth Orbit MEO
planes at 23,616km above the earth– 9 satellite + 1 spare per plane– The inclination of the orbits was chosen to ensure
good coverage of polar latitudes, which are poorly served by the US GPS system
• One revolution 14 hours 4 min
18
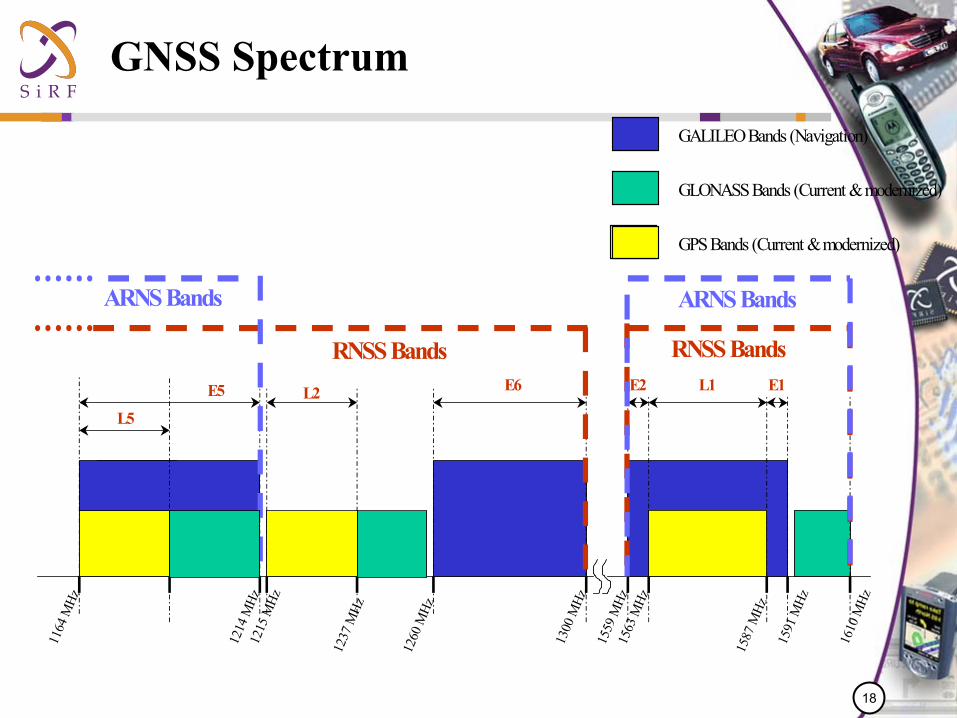
GNSS Spectrum
L5
E5 E6 L1E2 E1
1164
MHz
1214
MHz
1260
MHz
1300
MHz
1559
MHz
1587
MHz
1591
MHz
1563
MHz
1215
MHz
1237
MHz
L2
RNSS Bands RNSS Bands
ARNS Bands ARNS Bands
1610
MHz
GALILEO Bands (Navigation)
GPS Bands (Current & modernized)
GLONASS Bands (Current & modernized)

19
GPS & Galileo at L1

20
Data Collection (SiRF and Stanford)
BOC(1,1)BOC(15,2.5)
• Dish allowed us to see Galileo GIOVE-A signal when transmission was initialized• Code not necessary for data capture• Vector Signal Analyzer used to capture data from transmission
GIOVE-A E1-L1-E2

21
Galileo First Contact
22
GLONASS – Russia
• Soviet Era System• 2001 – 6 SVs• 2005 – 13 SVs• 18 SVs by 2008• 3 year life – today • 7 year life – new• Funding from India
Glonass Receivers use Multiple Frequencies = $$$

23
QZSS – Japan
• Quasi Zenith Satellite System
• Modification of Geosynchronous Orbit
• Covers Japan and Southern Asia
• WAAS like data on L1, L2 and L5

24
Satellites alone are never enough
Plus parking garages, tunnels, subway systems, etc.

25
SiRF InstantFIX™System Model Overview
SiRF GPS Monitoring Information
SiRF Server SGEE
Ephemeris Synthesis
'UTTf xyzr
XYZxyzNS ∇⋅⋅= φλ
λφ λφφuU
ruU
ru
rUU r ⋅
∂∂
⋅⋅
+⋅∂∂
⋅+⋅∂∂
=∇'
cos1'1''
[ ]∑ ∑
∑
∞
= =
∞
=
⋅+⋅⋅
⋅+
⋅⋅
⋅−=
1 1
*
01
*
sincos)(sin
)(sin'
l
l
mlmlmlm
l
e
ll
l
l
e
mSmCPra
r
JPra
rU
λλφµ
φµ
∫ ⋅⋅⋅
⋅
=M
ll
le
l dmPRaM
J )'(sin1* φ

26
TTFF Comparison
0102030405060708090
100
TTFF
Sec
onds
Open Sky UrbanCanyon on
Roof
UrbanCanyon on
Dash
InstantFixAutonomous
SF Urban Canyon

27
1 Day Old Synthetic Ephemeris
Typical San Francisco Run with Extended Ephemeris

28
7 Day Old Synthetic Ephemeris
Typical San Francisco Run with Extended Ephemeris

29
External Sensors
• Inertial Navigation has been around for a long time– Accelerometers, Gyros, Compasses– Really big and really expensive
• Technology advances such as MEMS are moving fast– But MEMS does not follow Moore’s law
• Size and price barrier has been overcome today– Airbag, HDD protection, screen orientation, jitter control, stability
control are consumer products today
• Level of accuracy is the main barrier– Measuring acceleration or heading for their own sake is easy– Integrating those measurements for navigation requires an
exponential increase in performance

30
Automotive leading the way
• The car platform has several major advantages– Not 6 degrees of freedom, only 2– Otherwise, the wheels don’t do much good
• Many sensors already built in– Odometer is good for distance– Gyro can be hard mounted to body frame
• Automotive technology is slow, consumers are fast– Need portable solutions with no mounting restrictions

31
Anywhere, anytime today in a car
32
Next Challenge
• Body frame– Belt clip provides good potential– Limited dynamics, wireless connection, pedometer
optimization
• Hand frame– Really want it inside your cell phone– More dynamics, no pedometer
• Object frame– Any item