learning representations - web.stanford.edu · learning representations cs331b: representation...
TRANSCRIPT

Learning RepresentationsCS331B: Representation Learning in Computer Vision
Amir R. ZamirSilvio Savarese

(class logistics)● Paper assignments out● Next weeks papers
○ Discriminative learning of deep convolutional feature point descriptors, Simo-Serra, E., Trulls, E., Ferraz, L., Kokkinos, I., Fua, P., & Moreno-Noguer, F., ICCV15
○ Data-Driven 3D Voxel Patterns for Object Category Recognition, Yu Xiang, Wongun Choi, Yuanqing Lin and Silvio Savarese., CVPR15.
○ Convolutional-recursive deep learning for 3d object classification, Socher, R., Huval, B., Bath, B., Manning, C. D., & Ng, A. Y., NIPS12
2
What we talked about so far...
3

Things... Our Knowledge...
4

“Transcript”
Cat
Macbeth was guilty.
[ 81 20 84 64 58 39 17 54 72 15]
Representation Mathematical Model (e.g., classifier)
5

Some basics concepts related to representations● Ill-posedness● Readout Non-linearity ● Dimensionality● Computational Complexity ● Encoding power (i.e., performance)● Narrowness of application domain (vertical vs horizontal representations)
6

Ill-posedness
7C. F. Bohren, D. R. Huffman, 1983.

8
With respect to: {modeling parameters (decision) , independent variables (representation)}
Linearity
Independent var. (x,y)
Modeling Param. (a,b,c,r)
Linear non-Linear
Linear Linear
Decision boundary
Not discussing kernels, reparametrization, etc

Handcrafting...
9

Represent these cats for a cat detector!
10

Represent these cats for a cat detector! (II)
11

Represent these cats for a cat detector! (III)
12

Represent these cats for a cat detector! (IV)
13

Color Histograms
Deformable Part based Models
(DPM)
Histogram of Gradients
(HOG)
Models based Shapes
14Felzenszwalb et al., 2010. Dalal and Triggs, 2005.Beis and Lowe, 1997.

Handcrafting...● Was the only way for a long time. ● (almost) Worked for many great applications:
○ Image Retrieval, Structure-from-motion, Face detection, Identification, etc
● Why alternatives?
15

Handcrafting...● Was the only way for a long time. ● (almost) Worked for many great applications:
○ Image Retrieval, Structure-from-motion, Face detection, Identification, etc
● Why alternatives?○ Can’t quite find the discriminative signature for a problem.
16
Why a sad image?

Handcrafting...● Was the only way for a long time. ● (almost) Worked for many great applications:
○ Image Retrieval, Structure-from-motion, Face detection, Identification, etc
● Why alternatives?○ Can’t quite find the discriminative signature for a problem.○ Discriminative signature can be found, but hard to approach programmatically.
17
Track the fish.

Handcrafting...● Was the only way for a long time. ● (almost) Worked for many great applications:
○ Image Retrieval, Structure-from-motion, Face detection, Identification, etc
● Why alternatives?○ Can’t quite find the discriminative signature for a problem.○ Discriminative signature can be found, but hard to approach programmatically.○ Too many contributing factors to the problem.
■ Fusion non-trivial. Rule-based fusion outruled. ■ Fusion of contributing factors itself a comparably complex representation problem.
18
Why a sad image?

Learning Representations
19
Two approaches to representation learning● Unsupervised
○ Representation constrained on reconstruction.
20
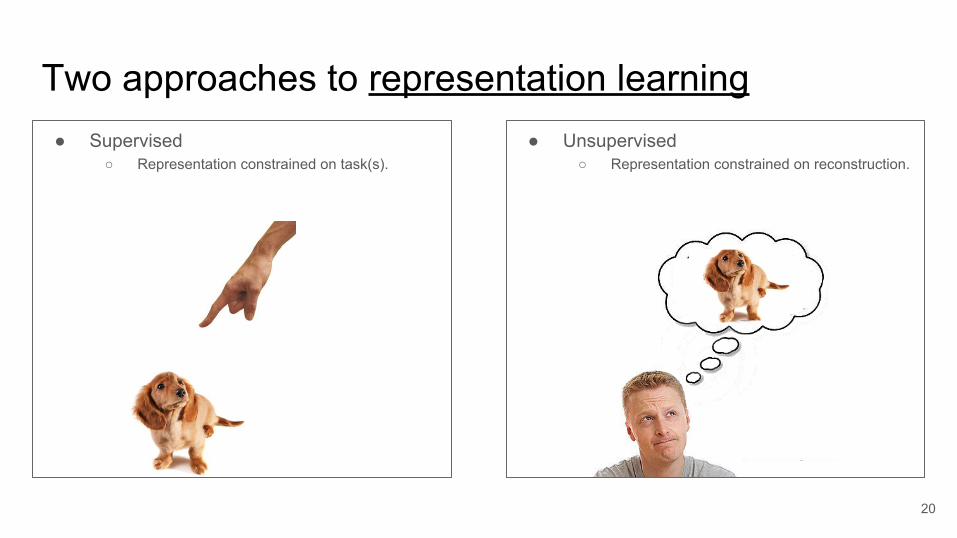
● Supervised○ Representation constrained on task(s).

Two approaches to representation learning● Supervised
○ Representation constrained on task(s).● Unsupervised
○ Representation constrained on reconstruction.
21LeCun et al. 1998. Hinton et al. 2006.

Pros and Cons● Supervised
○ Representation constrained on task(s).● Unsupervised
○ Representation constrained on reconstruction.
22LeCun et al. 1998. Hinton et al. 2006.

Unsupervised Representation Learning
23

Unsupervised representation learning● Unsupervised
○ Representation constrained on reconstruction.
24Hinton et al. 2006.
● Clarification: ○ Unsupervised does not necessarily
mean Generic and vice versa.○ Many of the generic representations are
actually trained discriminatively.○ Lecture 12

Unsupervised representation learning● Unsupervised
○ Representation constrained on reconstruction.
25Hinton et al. 2006.
● Usually a reconstruction loss:○ L2 pixel loss

Unsupervised representation learning● Unsupervised
○ Representation constrained on reconstruction.
26Johnson et al. 2016.Hinton et al. 2006.
● Usually a reconstruction loss:○ L2 pixel loss○ Perceptual loss
Ground Truth Bicubic Perceptual

Unsupervised representation learning methods● Sparse Coding● Basic Autoencoders● Restricted Boltzmann Machine● Generative Adversarial Network based feature learning● ...
27

28
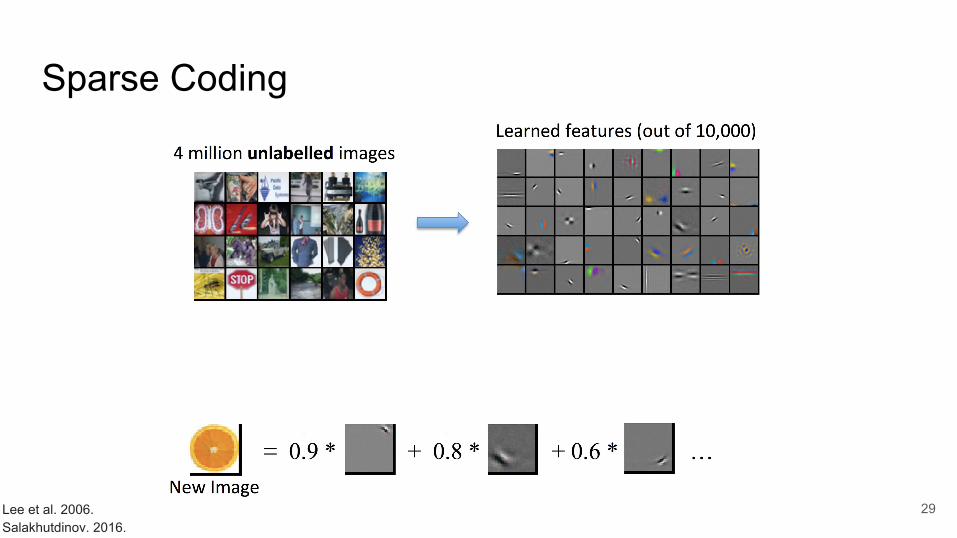
Sparse Coding
Lee et al. 2006.Salakhutdinov. 2016.
29
Sparse Coding
Lee et al. 2006.Salakhutdinov. 2016.

30
Autoencoder
Hinton et al. 2006.

31
Autoencoder
Hinton et al. 2006.

33
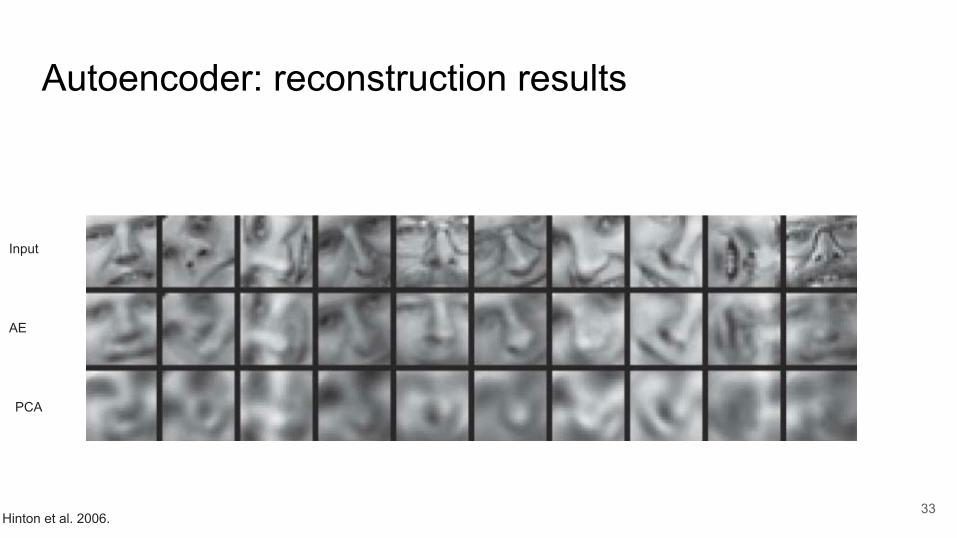
Autoencoder: reconstruction results
Hinton et al. 2006.
Input
PCA
AE

Supervised Models
34

35Stanford CS231n
Neural Networks
Neural Net
A Neuron
Convolutional X
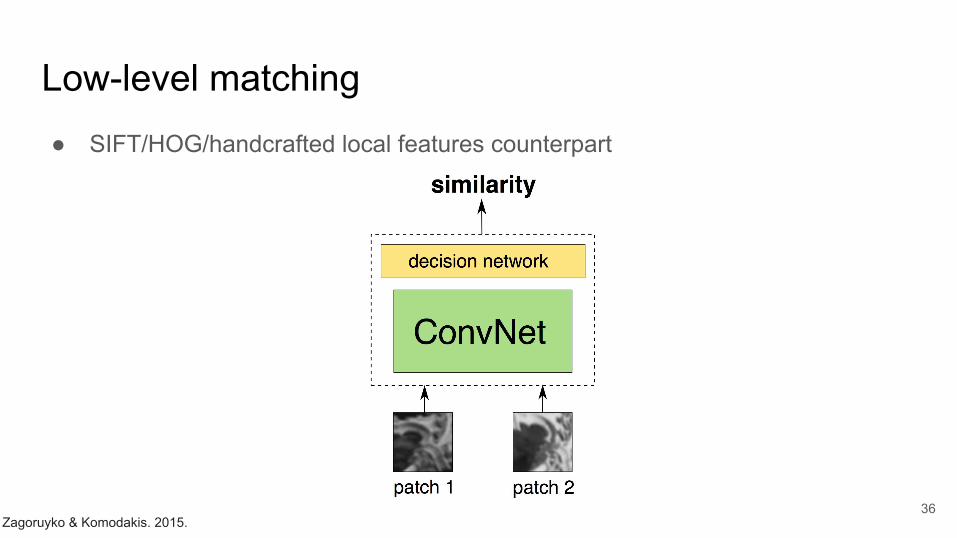
Low-level matching
36Zagoruyko & Komodakis. 2015.
● SIFT/HOG/handcrafted local features counterpart

Brown, Hua Winder, local feature learning dataset
37

Low-level matching
38Zagoruyko & Komodakis. 2015.
● Learned vs l2 metric

Low-level matching: Some qualitative results
39Zagoruyko & Komodakis. 2015.
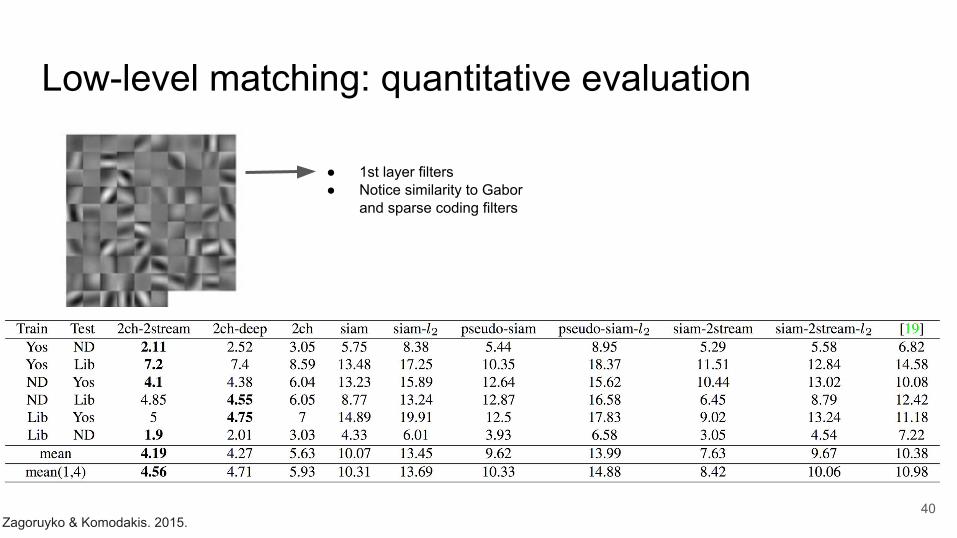
Low-level matching: quantitative evaluation
40Zagoruyko & Komodakis. 2015.
● 1st layer filters● Notice similarity to Gabor
and sparse coding filters

Dimensionality
41Han et al. 2015.
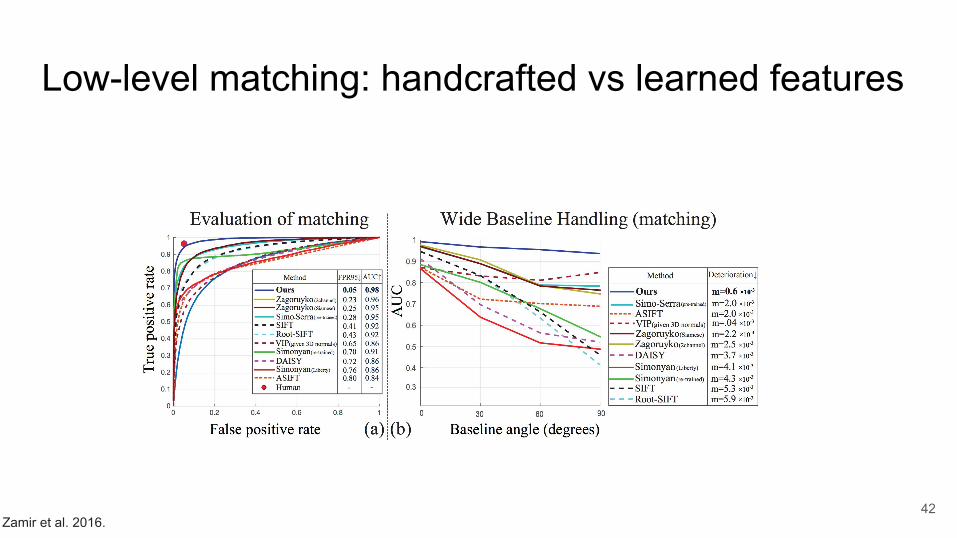
Low-level matching: handcrafted vs learned features
42Zamir et al. 2016.

Course webpage:http://web.stanford.edu/class/cs331b/
http://www.cs.stanford.edu/~amirz/http://cvgl.stanford.edu/silvio/