lecture 1: introduction and line segment intersectionsitharam/courses/cg/kreveldintroline...slabs,...
TRANSCRIPT
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric Algorithms
Lecture 1:
Course Organization
Introduction
Line segment intersection for map overlay
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
This course
instructors:Kevin Buchin and Herman Haverkort
course website:http://www.win.tue.nl/~hermanh/teaching/2IL55/
content: algorithmic aspects of spatial data
How to store, analyze, create, and manipulate spatialdata
applications in robotics, computer graphics, virtualreality, geographic information systems ...
register on StudyWeb!
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
This course
learning objectives:At the end of this course you should be able to . . .
decide which algorithm or data structure to use in orderto solve a given basic geometric problem,
analyze new problems and come up with your ownefficient solutions using concepts and techniques fromthe course.
grading:
do 3 homework assignments: 20% each
write research report (in pairs): 40%
to pass: you need 50% of points in the homework ANDa 5 for the research report
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
This course
before the course you should . . .
have complete Advanced Algorithms (2IL45)
have experience with the following topics:
basic algorithm design techniques: divide-and-conquer,greedy algorithms, linear programming . . .basic analysis techniques: proofs with induction andinvariants, O-notation, solving recurrences andsummations, basic probability theory . . .basic data structures: binary search trees, heaps . . .
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
This course
book (compulsory):[BCKO] M. de Berg, O. Cheong, M. van Kreveld, M.Overmars, Computational Geometry: Algorithms andApplications (3rd edition). Springer-Verlag, Heidelberg, 2008.
acknowledgement: slides will be based on slides by M. vanKreveld
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Introduction
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Geometry: points, lines, ...
Plane (two-dimensional), R2
Space (three-dimensional), R3
Space (higher-dimensional), Rd
A point in the plane, 3-dimensional space, higher-dimensionalspace.p = (px,py), p = (px,py,pz), p = (p1,p2, . . . ,pd)
A line in the plane: y = m · x+ c; representation by m and c
A half-plane in the plane: y≤ m · x+ c or y≥ m · x+ c
Represent vertical lines? Not by m and c . . .
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Geometry: line segments
A line segment pq is defined by itstwo endpoints p and q:(λ ·px +(1−λ ) ·qx, λ ·py +(1−λ ) ·qy)where 0≤ λ ≤ 1
Line segments are assumed to beclosed = with endpoints, not open
Two line segments intersect if theyhave some point in common. It is aproper intersection if it is exactly oneinterior point of each line segment
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Polygons: simple or not
A polygon is a connected region ofthe plane bounded by a sequence ofline segments
simple polygon
polygon with holes
convex polygon
non-simple polygon
The line segments of a polygon arecalled its edges, the endpoints ofthose edges are the vertices
Some abuse: polygon is onlyboundary
interior
exterior
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Other shapes: rectangles, circles, disks
A circle is only the boundary, a diskis the boundary plus the interior
Rectangles, squares, quadrants,slabs, half-lines, wedges, . . .
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Convexity
A shape or set is convex if for anytwo points that are part of theshape, the whole connecting linesegment is also part of the shape
Question: Which of the followingshapes are convex? Point, linesegment, line, circle, disk, quadrant?
For any subset of the plane (set ofpoints, rectangle, simple polygon),its convex hull is the smallest convexset that contains that subset
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Relations: distance, intersection, angle
The distance between two points isgenerally the Euclidean distance:√
(px−qx)2 +(py−qy)2
Another option: the Manhattandistance:
|px−qx|+ |py−qy|
Question: What is the set of pointsat equal Manhattan distance to somepoint?
√(px − qx)2 + (py − qy)2)
|px − qx|
|py − qy|
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Relations: distance, intersection, angle
The distance between two geometric objects other than pointsusually refers to the minimum distance between two points thatare part of these objects
Question: How can the distance between two line segments berealized?
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Relations: distance, intersection, angle
The intersection of two geometricobjects is the set of points (part ofthe plane, space) they have incommon
Question 1: How many intersectionpoints can a line and a circle have?
Question 2: What are the possibleoutcomes of the intersection of arectangle and a quadrant?
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Relations: distance, intersection, angle
Question 3: What is the maximumnumber of intersection points of aline and a simple polygon with 10vertices (trick question)?
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Relations: distance, intersection, angle
Question 4: What is the maximumnumber of intersection points of aline and a simple polygon boundarywith 10 vertices (still a trickquestion)?
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Description size
A point in the plane can berepresented using two reals
A line in the plane can berepresented using two reals and aBoolean (for example)
A line segment can be represented bytwo points, so four reals
A circle (or disk) requires three realsto store it (center, radius)
A rectangle requires four reals tostore it
false, m, c
true, .., c
y = m · x + c
x = c
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Description size
A simple polygon in the plane can be represented using 2n reals ifit has n vertices (and necessarily, n edges)
A set of n points requires 2n reals
A set of n line segments requires 4n reals
A point, line, circle, . . . requires O(1), or constant, storage.A simple polygon with n vertices requires O(n), or linear, storage
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Computation time
Any computation (distance, intersection) on two objects of O(1)description size takes O(1) time!
Question: Suppose that a simple polygon with n vertices is given;the vertices are given in counterclockwise order along theboundary. Give an efficient algorithm to determine all edges thatare intersected by a given line.
How efficient is your algorithm? Why is your algorithm efficient?
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Convex hull problem (Advanced Algorithms)
Give an algorithm that computes theconvex hull of any given set of n points inthe plane efficiently
Question 1: What is the input size?
Question 2: Why can’t we expect to doany better than O(n) time?
Question 3: Is there any hope of findingan O(n) time algorithm?
Question 4: What’s the optimal runningtime?
Read Chapter 1 of [BCKO] today!
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Computational geometry scope
In computational geometry, problems on input with more thanconstant description size are the ones of interest
Computational geometry (theory): Study of geometric problems ongeometric data, and how efficient geometric algorithms that solvethem can be
Computational geometry (practice): Study of geometric problemsthat arise in various applications and how geometric algorithms canhelp to solve well-defined versions of such problems
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Computational geometry theory
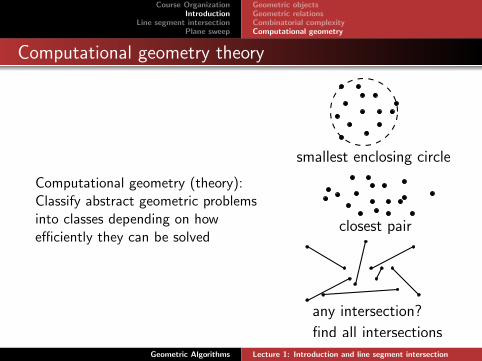
Computational geometry (theory):Classify abstract geometric problemsinto classes depending on howefficiently they can be solved
smallest enclosing circle
closest pair
any intersection?
find all intersectionsGeometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Computational geometry practice
Application areas that require geometric algorithms are computergraphics, motion planning and robotics, geographic informationsystems, CAD/CAM, statistics, physics simulations, databases,games, multimedia retrieval, . . .
Computing shadows from virtual light sources
Spatial interpolation from groundwater pollutionmeasurements
Computing a collision-free path between obstacles
Computing similarity of two shapes for shape databaseretrieval
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Computational geometry history
Early 70s: First attention for geometric problems from algorithmsresearchers
1976: First PhD thesis in computational geometry (MichaelShamos)
1985: First Annual ACM Symposium on Computational Geometry.Also: first textbook
1996: CGAL: first serious implementation effort for robustgeometric algorithms
1997: First handbook on computational geometry (second one in2000)
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Geometric objectsGeometric relationsCombinatorial complexityComputational geometry
Line segment intersection
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Motivation: Map overlayProblemOutput-sensitive algorithmsSome attempts
Map layers
In a geographic information system(GIS) data is stored in separatelayers
A layer stores the geometricinformation about some theme, likeland cover, road network,municipality boundaries, red foxhabitat, . . .
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Motivation: Map overlayProblemOutput-sensitive algorithmsSome attempts
Map overlay
Map overlay is the combination oftwo (or more) map layers
It is needed to answer questions like:
What is the total length ofroads through forests?
What is the total area of cornfields within 1km from a river?
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Motivation: Map overlayProblemOutput-sensitive algorithmsSome attempts
Map overlay
To solve map overlay questions, weneed (at the least) intersectionpoints from two sets of line segments(possibly, boundaries of regions)
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Motivation: Map overlayProblemOutput-sensitive algorithmsSome attempts
The (easy) problem
Let’s first look at the easiest versionof the problem:
Given a set of of n line segments inthe plane, find all intersection pointsefficiently
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Motivation: Map overlayProblemOutput-sensitive algorithmsSome attempts
An easy, optimal algorithm?
Algorithm FindIntersections(S)Input. A set S of line segments in the plane.Output. The set of intersection points among the segments in S.1. for each pair of line segments ei,ej ∈ S2. do if ei and ej intersect3. then report their intersection point
Question: Why can we say that this algorithm is optimal?
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Motivation: Map overlayProblemOutput-sensitive algorithmsSome attempts
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Motivation: Map overlayProblemOutput-sensitive algorithmsSome attempts
Output-sensitive algorithm
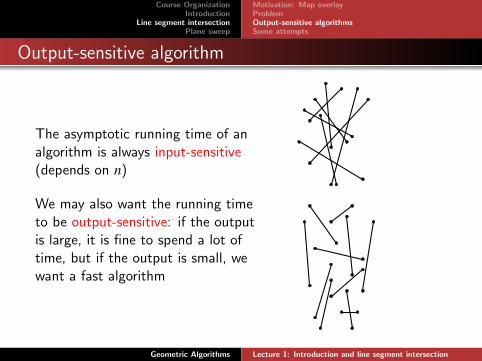
The asymptotic running time of analgorithm is always input-sensitive(depends on n)
We may also want the running timeto be output-sensitive: if the outputis large, it is fine to spend a lot oftime, but if the output is small, wewant a fast algorithm
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Motivation: Map overlayProblemOutput-sensitive algorithmsSome attempts
Intersection points in practice
Question: How many intersectionpoints do we typically expect in ourapplication?
If this number is k, and if k = O(n),it would be nice if the algorithm runsin O(n logn) time
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
Motivation: Map overlayProblemOutput-sensitive algorithmsSome attempts
First attempt
Observation: Two line segmentscan only intersect if their y-spanshave an overlap
So, how about only testing pairs ofline segments that intersect in they-projection?
1-D problem: Given a set of intervalson the real line, find all partlyoverlapping pairs
x
y
s1 s2s3 s4 s5 s6
(s1, s2), (s4, s6), (s5, s6)
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
Motivation: Map overlayProblemOutput-sensitive algorithmsSome attempts
Second attempt
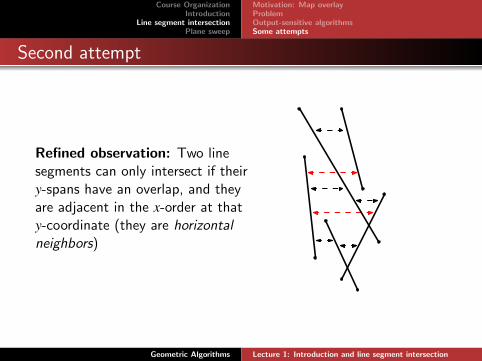
Refined observation: Two linesegments can only intersect if theiry-spans have an overlap, and theyare adjacent in the x-order at thaty-coordinate (they are horizontalneighbors)
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Plane sweep
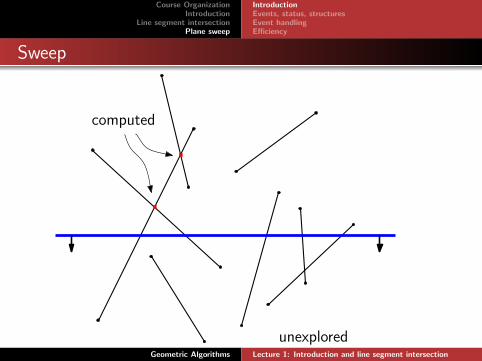
The plane sweep technique: Imagine a horizontal linepassing over the plane from top to bottom, solving theproblem as it moves
The sweep line stops and the algorithm computes atcertain positions ⇒ events
The algorithm stores the relevant situation at the currentposition of the sweep line ⇒ status
The algorithm knows everything it needs to know abovethe sweep line, and found all intersection points
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Sweep
computed
unexploredGeometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Sweep and status
computed
unexplored
status
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status and events
The status of this particular plane sweep algorithm, at thecurrent position of the sweep line, is the set of line segmentsintersecting the sweep line, ordered from left to right
The events occur when the status changes, and when outputis generated
event ≈ interesting y-coordinate
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
add s1
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
add s2 after s1
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
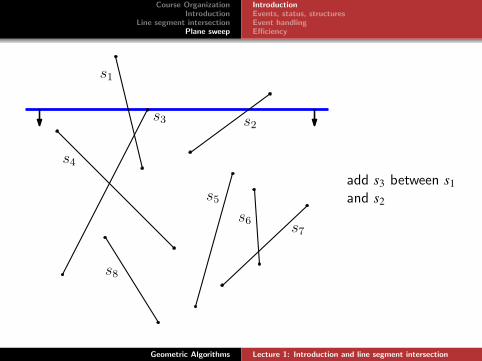
s1
s2s3
s4
s6
s5
s7
s8
add s3 between s1and s2
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
add s4 before s1
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
report intersection(s1,s2); swap s1and s3
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
remove s2
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
remove s1
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
add s5
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
s1
s2s3
s4
s6
s5
s7
s8
report intersection(s3,s4); swap s3and s4
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
. . . and so on . . .
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
The events
When do the events happen? When the sweep line is
at an upper endpoint of a line segment
at a lower endpoint of a line segment
at an intersection point of a line segment
At each type, the status changes; at the third type output isfound too
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Assume no degenerate cases
We will at first exclude degenerate cases:
No two endpoints have the samey-coordinate
No more than two line segmentsintersect in a point
. . .
Question: Are there more degeneratecases?
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event list and status structure
The event list is an abstract data structure that stores allevents in the order in which they occur
The status structure is an abstract data structure thatmaintains the current status
Here: The status is the subset of currently intersected linesegments in the order of intersection by the sweep line
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status structure
We use a balanced binary search tree with the line segmentsin the leaves as the status structure
s1s2
s3 s4s5
s6
s7
s8
s1
s2
s3
s4
s5
s6
s7
s1 s2 s3 s4 s5 s6 s7 s8
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status structure
s1s2
s3 s4s5
s6
s7
s8
s1
s2
s3
s4
s5
s6
s7
s1 s2 s3 s4 s5 s6 s7 s8
s9
Upper endpoint: search, and insertGeometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status structure
s1s2
s3 s4s5
s6
s7
s8
s1
s2
s3
s4
s5
s6
s7
s1 s2 s3 s4 s5 s6 s7 s8
s9
Upper endpoint: search, and insertGeometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status structure
s1s2
s3 s4s5
s6
s7
s8
s1
s2
s3
s4
s5
s6
s7
s1 s2
s3
s4 s5 s6 s7 s8
s9
s9
s9
Upper endpoint: search, and insertGeometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Status structure
Sweep line reaches lower endpoint of a line segment: deletefrom the status structure
Sweep line reaches intersection point: swap two leaves in thestatus structure (and update information on the search paths)
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Finding events
Before the sweep algorithm starts, we know all upperendpoint events and all lower endpoint events
But: How do we know intersection point events???(those we were trying to find . . .)
Recall: Two line segments can only intersect if they arehorizontal neighbors
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
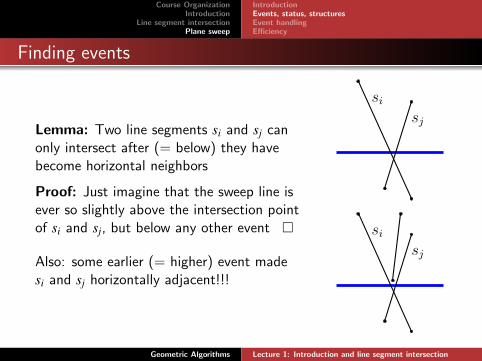
Finding events
Lemma: Two line segments si and sj canonly intersect after (= below) they havebecome horizontal neighbors
Proof: Just imagine that the sweep line isever so slightly above the intersection pointof si and sj, but below any other event �
Also: some earlier (= higher) event madesi and sj horizontally adjacent!!!
si
sj
si
sj
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event list
The event list must be a balanced binary search tree, becauseduring the sweep, we discover new events that will happenlater
We know upper endpoint events and lower endpoint eventsbeforehand; we find intersection point events when theinvolved line segments become horizontal neighbors
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Structure of sweep algorithm
Algorithm FindIntersections(S)Input. A set S of line segments in the plane.Output. The intersection points of the segments in S, with for
each intersection point the segments that contain it.1. Initialize an empty event queue Q. Next, insert the
segment endpoints into Q; when an upper endpoint isinserted, the corresponding segment should be storedwith it
2. Initialize an empty status structure T3. while Q is not empty4. do Determine next event point p in Q and delete it5. HandleEventPoint(p)
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
If the event is an upper endpointevent, and s is the line segment thatstarts at p:
1 Search with p in T, and insert s2 If s intersects its left neighbor in
T, then determine theintersection point and insert it Q
3 If s intersects its right neighborin T, then determine theintersection point and insert it Q
p
s
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
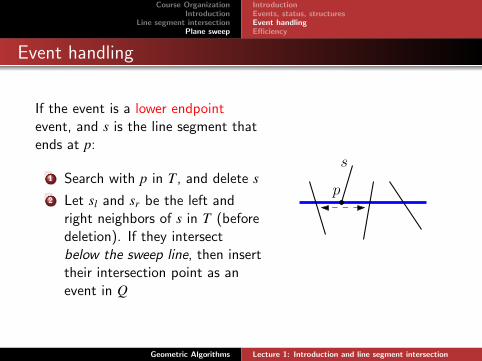
Event handling
If the event is a lower endpointevent, and s is the line segment thatends at p:
1 Search with p in T, and delete s2 Let sl and sr be the left and
right neighbors of s in T (beforedeletion). If they intersectbelow the sweep line, then inserttheir intersection point as anevent in Q
p
s
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
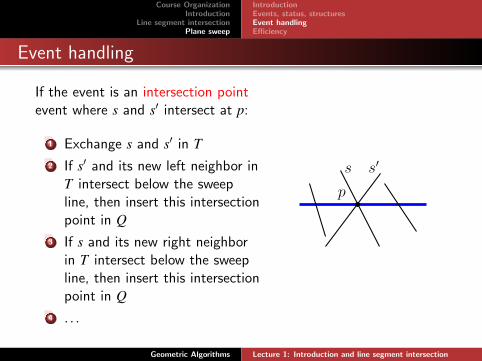
If the event is an intersection pointevent where s and s′ intersect at p:
1 . . .
2 . . .
3 . . .
4 . . .
p
s s′
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
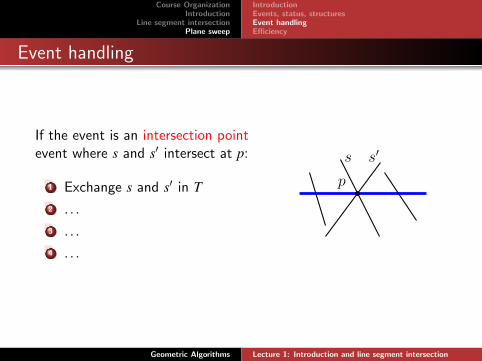
Event handling
If the event is an intersection pointevent where s and s′ intersect at p:
1 Exchange s and s′ in T2 . . .
3 . . .
4 . . .
p
s s′
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
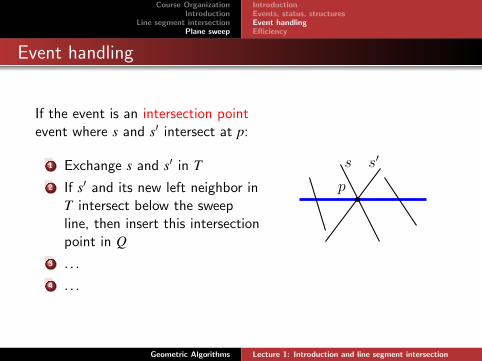
If the event is an intersection pointevent where s and s′ intersect at p:
1 Exchange s and s′ in T2 If s′ and its new left neighbor in
T intersect below the sweepline, then insert this intersectionpoint in Q
3 . . .
4 . . .
p
s s′
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
If the event is an intersection pointevent where s and s′ intersect at p:
1 Exchange s and s′ in T2 If s′ and its new left neighbor in
T intersect below the sweepline, then insert this intersectionpoint in Q
3 If s and its new right neighborin T intersect below the sweepline, then insert this intersectionpoint in Q
4 . . .
p
s s′
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
If the event is an intersection pointevent where s and s′ intersect at p:
1 Exchange s and s′ in T2 If s′ and its new left neighbor in
T intersect below the sweepline, then insert this intersectionpoint in Q
3 If s and its new right neighborin T intersect below the sweepline, then insert this intersectionpoint in Q
4 Report the intersection point
p
s s′
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Event handling
p
s
s′
Can it be that newhorizontal neighbors alreadyintersected above the sweepline?
Can it be that we insert anewly detected intersectionpoint event, but it alreadyoccurs in Q?
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
How much time to handle an event?
At most one search in T and/or one insertion, deletion, orswap
At most twice finding a neighbor in T
At most one deletion from and two insertions in Q
Since T and Q are balanced binary search trees, handling anevent takes only O(logn) time
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
How many events?
2n for the upper and lower endpoints
k for the intersection points, if there are k of them
In total: O(n+ k) events
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
Initialization takes O(n logn) time (to put all upper and lowerendpoint events in Q)
Each of the O(n+ k) events takes O(logn) time
The algorithm takes O(n logn+ k logn) time
If k = O(n), then this is O(n logn)
Note that if k is really large, the brute force O(n2) timealgorithm is more efficient
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
Question: How much storage does the algorithm take?
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Efficiency
Question: Given that the event list is a binary tree that maystore O(k) = O(n2) events, is the efficiency in jeopardy?
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Degenerate cases
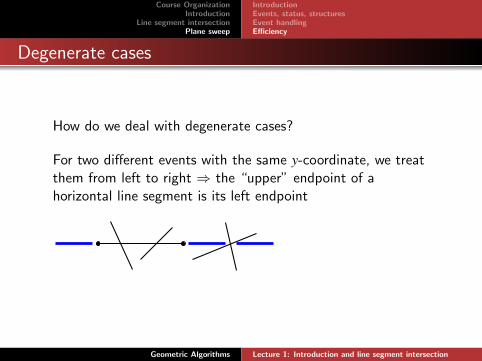
How do we deal with degenerate cases?
For two different events with the same y-coordinate, we treatthem from left to right ⇒ the “upper” endpoint of ahorizontal line segment is its left endpoint
Geometric Algorithms Lecture 1: Introduction and line segment intersection

Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Degenerate cases
How about multiply coinciding event points?
p
Let U(p) and L(p) be the line segments that have p as upperand lower endpoint, and C(p) the ones that contain p
Question: How do we handle this multi-event?
Geometric Algorithms Lecture 1: Introduction and line segment intersection
Course OrganizationIntroduction
Line segment intersectionPlane sweep
IntroductionEvents, status, structuresEvent handlingEfficiency
Conclusion
For every sweep algorithm:
Define the status
Choose the status structure and the event list
Figure out how events must be handled (with sketches!)
To analyze, determine the number of events and howmuch time they take
Then deal with degeneracies
Geometric Algorithms Lecture 1: Introduction and line segment intersection