lm628/lm629 precision motion controller (jp) · pdf filelm628,lm629 lm628/lm629 precision...
TRANSCRIPT

LM628,LM629
LM628/LM629 Precision Motion Controller
Literature Number: JAJSBD1

2003年 1月
1© National Semiconductor Corporation DS009219-05-JP
LM
628/LM
629 高精度モーション・コントロール
ICL
M6
28
/LM
62
9
20
03
01
23
Ch
ang
ed E
SD
To
lerance to
10
00
V fro
m 2
00
0V
per P
aul D
olan
. SN
cle
an u
p afte
r co
nv
ersio
n. C
NC
onv
erted to
nat2
000
DT
Dfix
the p
id an
d rem
ove tri-state trad
emark
. CN
figure 1
7 an
d its referen
ce had
been
remo
ved
in th
is copy o
f the sg
ml b
ut th
e pd
f was n
ever u
pd
ated.S
N
DS
00
92
19
118
00
24
02
0
19
86
10
23
LM
62
8
高精度モーション・コントロール
IC
LM
62
9
高精度モーション・コントロール
IC
LM628/LM629高精度モーション・コントロール IC
TRI-STATE®はナショナルセミコンダクター社の登録商標です。
概要
LM628/LM629は DCサーボモータ、ブラシレスDCサーボモータ、およびその他のサーボ・メカニズム用の閉ループ制御モーション・コントロール・プロセッサです。これらのデバイスは内部に位置、速度制御用の 32ビット・プロセッサを持ち、ホスト・コンピュータとのインタフェースにより、リアルタイムに高精度のデジタル位置決め制御が可能です。モータのコントロールは、デバイス内部のユーザコマンド・シーケンサに外部のホスト・コンピュータからコマンドを指定して行われます。LM628/LM629 とも、モータの回転数検出用としてインクリメンタル・エンコーダを使用するように設計されており、エンコーダ入力を備えています。LM628は 8ビットのパラレル出力を備えており、8ビットDACまたは 12ビットDACを駆動できます。したがって、LM628でシステムを構成する場合、モータとコンピュータのほかに DAC とパワーアンプが必要となります。LM629は 8ビットの PWM出力を備えており、H-スイッチを直接駆動できます。その他の機能、特性は LM628と同じです。チップのプロセスは NMOS、パッケージは 28ピンモールド DIP、24ピン SOP (LM629のみ )です。両デバイスとも最大クロック周波数が 6MHzのバージョンと8MHzのバージョンが用意されています。なお、この両デバイスは SDAの協力により設計されたものです。
特長
■ 位置、速度、加速度のレジスタが 32ビット■ プログラム可能な 16ビット係数のデジタル PIDフィルタ■ プログラム可能なサンプリング周期■ 8ビット、あるいは 12ビットDAC用出力 (LM628)
■ 8ビット・サイン /マグニチュード PWM出力 (LM629)
■ 台形速度軌跡ジェネレータを内蔵■ 速度、目標位置、フィルタのパラメータはモータ動作中に変更可能
■ 位置モードと速度モードの 2つの動作モード■ ホストへの割り込みがリアルタイムでプログラム可能■ 8ビット・パラレル非同期のホスト・インタフェース■ 矩形パルス入力のインクリメンタル・エンコーダ・インタフェース (インデックス・パルス入力付き )
■ 28ピンDIPパッケージおよび24ピンSOPピンパッケージ(LM629
のみ )が利用可
Note: LM628/629を使用して設計する際は、必ずアプリケーション・ノートAN-693および AN-706を参照してください。
FIGURE 1. Block Diagram
ご注意:この日本語データシートは参考資料として提供しており、内容 が最新でない場合があります。製品のご検討およびご採用に際 しては、必ず最新の英文データシートをご確認ください。

2www.national.com/JPN/
LM
628/
LM
629
ピン配置図LM628N LM629N LM629M
*Do not connect.
Order Number LM629M-6, LM629M-8, LM628N-6, LM628N-8, LM629N-6 or LM629N-8See NS Package Number M24B or N28B

3 www.national.com/JPN/
LM
628/LM
629
絶対最大定格 (Note 1)
本データシートには軍用・航空宇宙用の規格は記載されていません。関連する電気的信頼性試験方法の規格を参照ください。
動作定格
DC電気的特性(VDDとTAは上記の動作範囲;fCLK= 6MHz)
AC電気的特性(VDDとTAは上記の動作範囲;fCLK= 6MHz;CLOAD= 50pF;入力試験信号 tr= tf= 10ns)
各ピンの電圧 (GNDを基準 ) - 0.3V~+ 7.0V
保存温度範囲 - 65℃~+ 150℃リード温度
28ピン・デュアル・インライン・パッケージ (ハンダ付け、4秒 ) 260℃
24ピン表面実装パッケージ(ハンダ付け、10秒 ) 300℃
最大消費電力 (TA≦ 85℃、Note 2) 605 mW
ESD耐圧 (CZAP= 120pF、RZAP= 1.5k) 1000V
動作温度範囲 - 40℃< TA<+ 85℃クロック周波数
LM628N-6、LM629N-6、LM629M-6 1.0 MHz< fCLK< 6.0 MHz
LM628N-8、LM629N-8、LM629M-8 1.0 MHz< fCLK< 8.0 MHz
電源電圧 (VDD) 4.5V< VDD< 5.5V
Symbol Parameter Conditions Tested Limits Units
Min Max
IDD Supply Current Outputs Open 110 mA
INPUT VOLTAGES
VIH Logic 1 Input Voltage 2.0 V
VIL Logic 0 Input Voltage 0.8 V
IIN Input Currents 0≦ VIN≦ VDD - 10 10 μA
OUTPUT VOLTAGES
VOH Logic 1 IOH=- 1.6 mA 2.4 V
VOL Logic 0 IOL= 1.6 mA 0.4 V
IOUT TRI-STATE® Output Leakage Current 0≦ VOUT≦ VDD - 10 10 μA
Timing Interval T# Tested Limits Units
Min Max
ENCODER AND INDEX TIMING (See Figure 2)
Motor-Phase Pulse Width T1μs
Dwell-Time per State T2μs
Index Pulse Setup and Hold T3 0 μs
(Relative to A and B Low)
CLOCK AND RESET TIMING (See Figure 3)
Clock Pulse Width
LM628N-6, LM629N-6, LM629M-6 T4 78 ns
LM628N-8, LM629N-8, LM629M-8 T4 57 ns
Clock Period
LM628N-6, LM629N-6, LM629M-6 T5 166 ns
LM628N-8, LM629N-8, LM629M-8 T5 125 ns
Reset Pulse Width T6μs

4www.national.com/JPN/
LM
628/
LM
629
AC電気的特性 (つづき )
(VDDとTAは上記の動作範囲;fCLK= 6MHz;CLOAD= 50pF;入力試験信号 tr= tf= 10ns)
Note 1: 「絶対最大定格」を超える条件下では、デバイスは損傷を受けます。デバイスを「動作定格」を超えて動作させる場合、DCおよび AC電気特性のスペックは適用されません。
Note 2: 70℃以上の周囲温度で動作させる場合、デバイスは、最大接合部温度を超えないように保護しなければなりません。デバイスをプリント基板に実装する時は、リードを囲む 3インチ以上の銅エリア (グラウンド・プレーンなど )にハンダ付けします。28ピンDIP (N)と24ピン SO (M)は銅のリードフレームをプラスチックでモールドしています。ダイから発生した熱は、リードフレームからプリント基板の銅パターンへと逃げます。銅パターンはヒートシンクとして働きます。片面基板より、両面または多層基板の方がより良い放熱特性を持ちます。
Note 3: ビジービットを読み出すためには、ステイタスバイトが最初に読み出されなければなりません。ビジービットの読み出し時間は、ビジービットをセットするためにチップが必要とする時間よりもはるかに長いため、実際にビジービット・ディレイを測定するのは不可能です。ビジービットは、ユーザがそれを読み出すとすぐに有効になることに対して保証されます。
Timing Interval T# Tested Limits Units
Min Max
STATUS BYTE READ TIMING (See Figure 4)
Chip-Select Setup/Hold Time T7 0 ns
Port-Select Setup Time T8 30 ns
Port-Select Hold Time T9 30 ns
Read Data Access Time T10 180 ns
Read Data Hold Time T11 0 ns
RD High to Hi-Z Time T12 180 ns
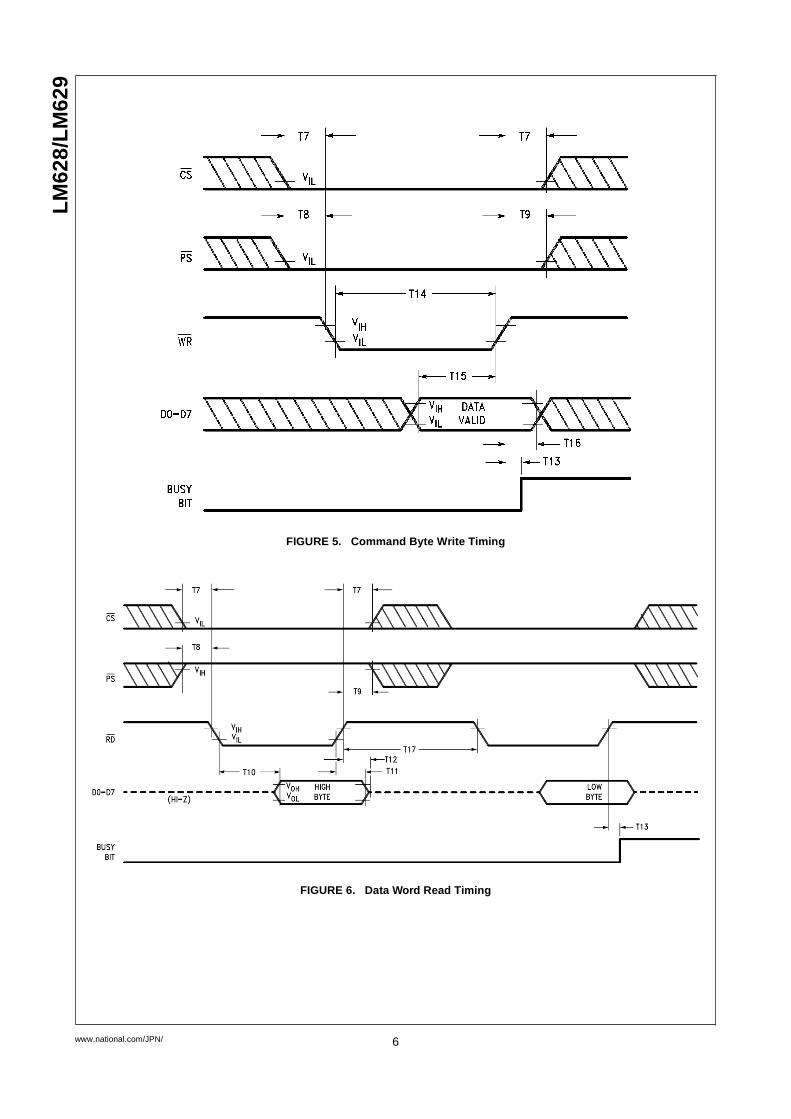
COMMAND BYTE WRITE TIMING (See Figure 5)
Chip-Select Setup/Hold Time T7 0 ns
Port-Select Setup Time T8 30 ns
Port-Select Hold Time T9 30 ns
Busy Bit Delay T13 (Note 3) ns
WR Pulse Width T14 100 ns
Write Data Setup Time T15 50 ns
Write Data Hold Time T16 120 ns
DATA WORD READ TIMING (See Figure 6)
Chip-Select Setup/Hold Time T7 0 ns
Port-Select Setup Time T8 30 ns
Port-Select Hold Time T9 30 ns
Read Data Access Time T10 180 ns
Read Data Hold Time T11 0 ns
RD High to Hi-Z Time T12 180 ns
Busy Bit Delay T13 (Note 3) ns
Read Recovery Time T17 120 ns
DATA WORD WRITE TIMING (See Figure 7)
Chip-Select Setup/Hold Time T7 0 ns
Port-Select Setup Time T8 30 ns
Port-Select Hold Time T9 30 ns
Busy Bit Delay T13 (Note 3) ns
WR Pulse Width T14 100 ns
Write Data Setup Time T15 50 ns
Write Data Hold Time T16 120 ns
Write Recovery Time T18 120 ns

5 www.national.com/JPN/
LM
628/LM
629
FIGURE 2. Quadrature Encoder Input Timing
FIGURE 3. Clock and Reset Timing
FIGURE 4. Status Byte Read Timing
6www.national.com/JPN/
LM
628/
LM
629
FIGURE 5. Command Byte Write Timing
FIGURE 6. Data Word Read Timing

7 www.national.com/JPN/
LM
628/LM
629
FIGURE 7. Data Word Write Timing
端子説明 (ピン配置図を参照 )
24ピン SOPのピン番号をカッコ内に示します。
ピン 1 (17): インデックス (IN) 入力 : エンコーダからのインデックス・パルスを受けます。使用しない場合は、"HIGH"レベルに吊っておきます。ピン 1、2、3がすべて "LOW"の場合にインデックス位置が読み込まれます。
ピン 2、3 (18、19): エンコーダ信号 (A、B)入力 :インクリメンタル・エンコーダからの 2相矩形信号を受けます。モータが正回転しているとき、ピン 2の信号はピン 3の信号よりも90 進゚みます。これらの信号は 8クロックに対応したエンコーダ出力です (Figure 9
参照 )。エンコーダの矩形信号を逓倍することによって 4 倍の分解能が得られるため、エンコーダの状態を確定する周波数は最大1MHz (fCLK = 8.0MHz の場合 )、あるいは 750kHz (fCLK =6.0MHzの場合 )になります。他のクロック周波数では、エンコーダの信号は各状態で最小 8クロックに対応します。
ピン 4~ 11 (20~ 24、2~ 4): ホスト I/Oポート (D0~ D7):ホスト・コンピュータ /プロセッサと接続される双方向性データポートです。LM628へのコマンドとデータの書き込み、LM628からのステイタスバイトとデータの読み出しなどのために使われます。これらは CS (ピン 12)、PS (ピン 16)、RD (ピン 13)、WR (ピン 15)
によって実行されます。
ピン 12 (5): チップセレクト (CS): 書き込み、あるいは読み出しを選択します。
ピン 13 (6): リード (RD): ステイタスとデータを読み出します。
ピン 14 (7): グラウンド (GND):グラウンド・ピン
ピン 15 (8): ライト (WR)入力 :コマンドとデータを書き込みます。
ピン 16 (9): ポートセレクト (PS) 入力 :コマンドポート、あるいはデータポートを選択します。このピンを "LOW" にすればコマンドポートが、"HIGH" にすればデータポートが選択されます。また、このピンによって以下のモードが可能となります。
1. コマンドがコマンドポートに書き込まれます (ピン 16 "LOW")。
2. ステイタスバイトがコマンドポートから読み出されます(ピン 16 "LOW")。
3. データがデータポートによって書き込まれ、読み出されます (ピン 16 "HIGH")。
ピン 17 (10): ホスト・インタラプト (HI)出力 :割り込み状態が発生したホスト・コンピュータに (ホスト・インタラプト・サービス・ルー
チンによって )、"HIGH" でアクティブになる信号がアラートをかけます。
ピン 18 ~ 25: DAC ポート (DAC0 ~ DAC7): 3 種類の異なるモードで使われる出力です。
1. LM628 (8 ビット出力モード );DAC への出力ラッチデータ。MSBはピン 18、LSBはピン 25。
2. LM628 (12ビット出力モード ):マルチプレックス6ビット・ワードの出力が 2 つあります。下位ワードが最初に出力されます。MSBはピン 18、LSBはピン 23です。つまり、下位ワードに対し、ピン 24は "LOW"になります。ピン 25の信号の立ち上がりエッジは出力データをストローブするために使われます。Figure 8にマルチプレックス信号のタイミングを示します。
3. LM629 (サイン /マグニチュード出力 ): PWMサイン信号がピン 18 (ピン 11)に、PWMマグニチュード信号がピン 19 (ピン13)に出力されます。LM629ではピン 20~ 25までは使用されません。Figure 11に PWM出力信号のフォーマットを示します。
ピン 26 (14): クロック (CLK): 6MHz (あるいは 8MHz)のシステム・クロックを受けます。
ピン 27 (15): リセット (RST): このピンは "LOW"でアクティブになり、立ち上がりエッジでトリガされ、LM628 の内部回路を以下のようにリセットします。なお、リセットパルスは少なくとも8クロックの間は "LOW"になります。
1. フィルタ係数と軌跡パラメータがゼロにされます。
2. 位置エラー・スレッショルドを最大値 (7FFF Hex)にセットし、コマンド LPEIを実行します。
3. インタラプト・コマンド SBPAとSBPRがマスクされます (実行不能 )。
4. 他の 5つのインタラプト・コマンドがマスクを解除されます ( 実行可能 )。
5. 現在位置をゼロ、あるいは "HOME"位置にイニシャライズします。
6. サンプリング周期を 2048/fCLK、あるいは 256μS (8MHzの場合 )にセットします。
7. DACポートが、12ビットDACを "ゼロ "にするため、800Hex
出力します。さらに 8ビットDACを "ゼロ "にするため、出力は 80Hexに戻ります。

8www.national.com/JPN/
LM
628/
LM
629
端子説明 (ピン配置図を参照 ) (つづき )
LM628のリセットピンがリリースされると、ただちにステイタスポートは '00'を読み出します。リセットが終了すると、ステイタスワードはHex'84'、または 'C4'に 1.5ms以内に変わります。しかし、ステイタスワードが 1.5ms以内でHex'00'からHex'84'、または 'C4'に変化しないときには、ユーザはもう一度リセットを実行し、上記のステップを繰り返します。リセットが適切に実行されたことを確実にす
るために、RSTIコマンドを実行します。チップのリセットが確実に実行されると、ステイタスバイトはHex'84'、あるいは'C4'からHex'80'、あるいは 'C0' に変わります。このように変化しないときは、ユーザはもう一度リセットを実行し、上記のステップを繰り返します。
ピン 28 (16): 電源電圧 (VDD): + 5Vを供給します。
FIGURE 8. 12-Bit Multiplexed Output Timing
動作原理
基本構成
LM628 を使用したサーボシステムの代表的なシステム・ブロック図を Figure 1 に示します。台形速度プロファイルとデジタル補償フィルタのプログラムを容易にするため、ホストプロセッサはI/Oポートを通じて LM628とインタフェースされます。LM628の DAC出力は D/A コンバータに入り、その出力はパワーアンプに入り、パワーアンプがモータをドライブします。閉ループ位置サーボシステムのフィードバックとして、LM628ではインクリメンタル・エンコーダを使 用します。台 形 速 度プロファイル・ジェネレータ(TrapezoidalVelocity Profile Generator)は位置モード、あるいは速度モードのどちらかに必要な軌跡 (Trajectory)を計算します。この計算では、LM628は設定位置 (プロファイル・ジェネレータ位置 )から実際の位置 (フィードバック位置 )を減算します。これによって生じる位置エラーは、モータを設定位置までドライブするためのデジタル・フィルタによって処理されます。Table 1に LM628/
LM629によって得られる基本性能を示します。
位置フィードバック・インタフェース
LM628 はインクリメンタル・エンコーダを使用して、モータとインタフェースされます。このために 3 つの入力を備えています。2つは矩形信号入力で、1つはインデックス・パルス入力です。矩形
信号はモータの絶対位置をトレースし続けるために使われます。ロジック信号のトランジションが矩形入力の 1 つに入るたびに、LM628 内部の位置レジスタはそれに応じて加算、または減算されます。これによってエンコーダ自身の分解能が得られます。Figure 9 を参照してください。各々のエンコーダ信号入力はLM628のクロックと同期しています。
もう1つのインデックス・パルス出力は、1回転ごとにロジック"LOW"
状態になり、いくつかのエンコーダがこの出力を持っています。ユーザがインデックス出力を使えるように LM628をプログラムした場合、すべて (3つ )のエンコーダ入力がロジック"LOW"になると、LM628 はそのときのモータの絶対位置を専用レジスタ ( インデックス・レジスタ )に記録します。
エンコーダがインデックス出力を持っていない場合、LM628 のインデックス入力はモータの "HOME" 位置を記録するために使われます。この場合、一般的に、モータはインデックス入力でロジック"LOW" レベルを発生するように配置されたスイッチを閉じます。LM628 はインデックス・レジスタにモータ位置を記録し、ホストプロセッサにアラート(割り込み )します。この方法でインデックス入力を使用するとき、モータのシャフトが回転している間は、インデックス入力がロジック"LOW"にならないようにしなければなりません。
TABLE 1. System Specifications Summary
位置範囲 - 1,073,741,824~ 1,073,741,823カウント
速度範囲 0~ 1,073,741,823/216カウント/サンプル (0~ 16,383カウント/サンプル )分解能 1/216カウント/サンプル/サンプル
加速度範囲 0~ 1,073,741,823/216カウント/サンプル /サンプル (0~ 16,383カウント/サンプル /サンプル )
分解能 1/216カウント /サンプル /サンプル
モータドライブ出力 LM628: 8ビットDAC用、あるいは 12ビットDAC用のマルチプレックス出力
LM629: 8ビットPWMサイン /マグニチュード出力
動作モード 位置および速度
フィードバック・デバイス インクリメンタル・エンコーダ (矩形信号、インデックスパルス入力付 )

9 www.national.com/JPN/
LM
628/LM
629
動作原理 (つづき )
TABLE 1. System Specifications Summary (つづき )
FIGURE 9. Quadrature Encoder Signals
FIGURE 10. Typical Velocity Profiles
速度プロファイル (軌跡 )ジェネレータ
台形速度プロファイル・ジェネレータは、時間ごとの目標モータ位置を計算します。位置モードではホストプロセッサは加速、最大速度と最終位置を決定します。LM628がこれらのパラメータを使用すると、モータは最大速度に達するまで決められた加速度で動作します。また、モータが決められた最終位置で停止するために、減速し始めるまで動作します。この場合の減速度は加速度
と同じです。動いている間はいかなる時点でも最大速度と (あるいは )目標位置は変化しています。つまり、モータは加速または減速します。Figure 10に 2つの代表的な台形速度プロファイルを示します。Figure 10 (a) は簡単な台形ですが、Figure 10 (b)
は、モータが動いている間に速度と位置が、異なる時点で変化する場合のプロファイルの例を示しています。
制御アルゴリズム Proportional Integral Derivative (PID) (積分範囲は可変 )
サンプル周期 微分項 : 2,048/fCLK~ (2,048*256) fCLKまで 2,048/fCLKのステップでプログラマブル(8MHzクロックで 256μs~ 65,536μs)
比例項と積分項 : 2048/fCLK

10www.national.com/JPN/
LM
628/
LM
629
動作原理 (つづき )
速度モードでは、モータは決められた加速度で決められた速度に達するまで加速します。停止命令が出されるまでその速度を維持します。次に、一定速度で目標位置に近づきます。速度モードの間に動作を妨げるものがなければ、長期平均速度は一定になります。モータが決められた速度を維持できない場合 (例えばロータがロックされたような場合 )、目標位置は離れ続けてしまい、その結果、大きな位置エラーを生じることになります。この状態が改善されない場合やモータを妨げる力が依然として加わっている場合は、(まだ達していない )目標位置に追いつくため、モータは非常に高速に達します。この状態は、コマンド LPEIとLPESを使用すると、簡単に検出されます。
すべての軌跡パラメータは 32ビットです。位置はその軌跡に印された計算値の総量になります。加速度と速度は 16ビットですが、正整数部のみで 16ビットを持っています。速度の整数部はモータが回転する際のサンプリング周期ごとのカウント数を表します。分数部はサンプリング周期毎の1カウント以下の追加カウントを示します。LM628 の位置分解能が正数カウントで決まるのに対し、平均速度分解能は分数カウントによって増加します。加速度についても速度と同様です。各々のサンプリング周期ごとにコマンドによって指定された加速度は、(コマンド速度に達しない限り)新たに速度を発生させるために現在の速度が加えられます。
以下に示すように各パラメータを設定します。例えば、500ラインのシャフト・エンコーダを使用し、モータ回転が 600rpmに達するまで加速度 (r/s/s)を設定し、スタートから正確に 100回転の位置で停止するように、減速させる設定にします。この場合の各パラメータは以下のように計算されます。
P=目標位置 (単位=エンコーダのカウント数 )とし、R=エンコーダの分解能× 4 (システムの分解能 )とすると、R= 500× 4= 2000
∴ P=R×希望する回転数P= 2000× 100= 200,000カウント(ロードする値 )
Hexでコーディングすると、P= 00030D40 (LM628に書き込まれるHexコード )
V=速度 (単位=カウント/サンプル )とし、T=サンプル時間 (秒 )= 341μS (6MHzクロックの場合 )とし、C=変換ファクタ数= 1分 /60秒とすると、∴ V=R×T×C×希望する回転数 (rpm)
V= 2000× 341E- 6× 1/60× 600rpm
V= 6.82カウント /サンプルスケーリングしてV= 6.82× 65,536= 446,955.52
V= 446,956 (ロードする値 )
HexでコーディングするとV= 0006D1EC (LM628に書き込まれるHexコード )となるA=加速度 (単位=カウント /サンプル /サンプル )とすると、∴ A=R×T×T×希望する加速度 (rev/sec/sec)
A= 2000× 341E- 6× 341E- 6× 1rev/sec/sec
A= 2.33E- 4カウント/サンプル /サンプルスケーリングしてA= 2.33E- 4×65,536= 15.24
丸めてA= 15 (ロードする値 )
HexでコーディングするとA= 0000000F (LM628に書き込まれるHexコード )
上記の位置、速度、加速度の値は LM628にロードできるようにバイナリコードに変換されます。速度と加速度の値は入力データの正数 / 分数部を調整するために、65,536 がかけられます。こ
れらの値がスケーリングされた後、分数部は忠実にロードされません。これは、バイナリに変換するため、データを丸めなければならないからです。システム分解能における "4"の増加ファクタは矩形エンコーダ信号をデコードするために使われる方法から得られたものです (Figure 9参照 )。
PID補償フィルタ
LM628 にはコントロール・ループを補償するために、デジタルProportional Integral Derivative (PID)フィルタが使われています。[位置エラー+位置エラーの積分+位置エラーの微分]に比例する補償力をモータに加えれば、目標位置を保ちます。次の離散時間方程式は、LM628 で実行される制御内容を示しています。
(1)
u (n)はサンプル時間 nのモータの制御信号出力です。e (n)はサンプル時間の位置エラーです。n' は微分サンプリング・レートのサンプリングを示します。kp、ki、kdはユーザによってロードされる離散時間フィルタのパラメータです。
第一項は正比例項で、フックの法則に従うスプリングのように、位置エラーに比例する補償力を表します。第二項は積分項で、時間とともに増加する補償力を表します。これは、静的位置エラーをゼロにします。しかし、一定のトルクをロードする場合、モータはゼロ位置エラーを発生します。
第三項は微分項で、位置エラーの変化率に比例する力を表します。これは、(自動車のショック・アブソーバのような )ダンピングの効いたスプリングと大型システムで、粘性のあるダンピングとして働きます。微分項に関連したサンプリング周期はユーザが選択できます。この機能によって、LM628 は連続した微分の適切な近似計算に基づく、慣性負荷 (システムの機械的時定数 )の広帯域制御を可能にしています。一般に、長いサンプリング周期は低速度制御に適しています。
動作中、フィルタのアルゴリズムはループ・サミング・ジャンクションから 16 ビットのエラー信号を受け取ります。このエラー信号は、正常な動作を確保するために 16ビットで飽和します。エラー信号はフィルタ係数 kpで乗算され、さらに前回のエラー累積分に加算されて (積分信号の生成 )、"微分 "サンプリング周期の選択で決まる一定速度でその加算分から前回のエラー分を減算します(微分信号の生成 )。フィルタの乗算は、すべて 16ビット動作で行われ、その積の下位 16ビットだけを使用します。
積分信号は 24ビットに維持されますが、上位 16ビットだけが使用されます。このスケーリング手法により、フィルタ係数 ki値の使用範囲が広がり(より非センシティブになり)ます。16ビットは 8ポジションに右シフトされ、フィルタ係数 kiで乗算され、モータ制御出力項を形成します。この積の絶対マグニチュード (振幅 )は係数 ilと比較され、より小さな適切なサイン ( 方向 ) 付きの振幅によってモータ制御信号が生成されます。
微分信号は、各 "微分 "サンプリング周期ごとに係数 kdにより乗算されます。この積はユーザ選択の "微分 "サンプリング周期から独立に、各サンプリング周期ごとにモータ制御出力を生成します。
kp、一定の ki、kd の各積項が加算されて、16ビットの数量が形成されます。出力モード (ワードサイズ )に応じて、上位 8ビットあるいは上位 12ビットのいずれかがモータ制御出力信号になります。

11 www.national.com/JPN/
LM
628/LM
629
動作原理 (つづき )
LM628リード /ライト・オペレーション
ホストプロセッサは、ポート・セレクト (PS)入力 (ピン 16)がロジック "LOW"のとき、ホスト I/Oポートを通って LM628にコマンドを書き込みます。希望のコマンドコードはパラレル・ポート・ラインに入り、ライト(WR)入力 (ピン 15)がストローブされます。コマンドバイトは、WR 入力の立ち上がりエッジで LM628の中へラッチされます。コマンドバイトを書き込むとき、まず最初にステイタスバイトを読み出す必要があり、"ビジービット"(ビット0)と呼ばれるフラッグの状態をチェックします。ビジービットがロジック "HIGH" のときは、コマンドは書き込まれません。ビジービットは 100μs以上の時間は不可で、15μs~ 25μsが標準です。
読み出しの場合、ホストプロセッサは書き込みの場合と同様に PS
(ピン 16)が "LOW"になったとき、リード (RD)入力 (ピン 13)をストローブし、ステイタスバイトを読み出します。ステイタスの情報は RDが "LOW"である限り残ります。
LM628へデータを書き込んだり、LM628からデータを読み出すためには (コマンドを書き、ステイタスを読むためには )、PS (ピン 16)
をロジック"HIGH"にします。これらの書き込みと読み出しは 2バイトワードの整数値 (1~ 7)です。それぞれの最初のバイトは上位バイトです。このバイトは、ライト(WR)、またはリード (RD)ストローブが必要です。データワード ( ペア・バイト )を伝送するとき、ステイタスバイトを最初に読み出し、ビジービットの状態をチェックする必要があります。ビジービットがロジック"LOW"のとき、ユーザは1つのデータワードからなる2つのバイトを順に伝送できますが、ビジービットが次のペア・バイトを伝送する前に (マルチプル・ワードを伝送するときに )、再度ロジック "LOW"になっているかチェック
しなければなりません。データ伝送は LM628の (重ね合わされていない ) 内部割り込み条件を通って完了となります。LM628 がデータ伝送 (あるいはコマンドバイト)のため割り込みされていないとき、ビジービットはホストプロセッサにその状態を知らせます。ビジービットが "HIGH"のときコマンドが書かれても、そのコマンドは無効となります。
コマンドバイトを書き込む、あるいはデータの 2番目のバイトを読み出し /書き込みした後に、ビジービットは直ちに "HIGH"になります(Figure 5~ 7参照 )。
モータ出力
LM628の DAC出力ポートは、ラッチド 8ビット・パラレル出力、またはマルチプレックス 12ビット出力のどちらでも使えます。8ビット出力として使う場合にはフロー・スルー ( 入力がラッチされていない ) D/Aコンバータを直接接続できます。12ビット出力は、入力がラッチされている12ビットD/Aコンバータと外部の 6ビット・ラッチを使って簡単にデマルチプレックスされます。DAC 出力データはオフセット・バイナリ・コードです。つまり、8ビットでゼロは 80Hex、12ビットでゼロは 800Hex です。これら以下の値ではモータに負のトルク、以上の値ではモータに正のトルクを与えます。12 ビット出力として使用する場合、LM628は、デマルチプレックス・プロセスを制御するための信号を備えています (Figure 8参照 )。
LM629は 8ビット、PWMのサインとマグニチュード出力信号を備え、スイッチ式のモータドライブ・アンプを直接ドライブできます。Figure 11に PWMマグニチュード出力信号のフォーマットを示します。
FIGURE 11. PWM Output Signal Format (Sign output (pin 18) not shown)
TABLE 2. LM628 User Command Set
Command Type Description Hex Data Note
BytesRESET Initialize Reset LM628 00 0 1
PORT8 Initialize Select 8-Bit Output 05 0 2
PORT12 Initialize Select 12-Bit Output 06 0 2
DFH Initialize Define Home 02 0 1
SIP Interrupt Set Index Position 03 0 1
LPEI Interrupt Interrupt on Error 1B 2 1
LPES Interrupt Stop on Error 1A 2 1
SBPA Interrupt Set Breakpoint, Absolute 20 4 1

12www.national.com/JPN/
LM
628/
LM
629
動作原理 (つづき )
TABLE 2. LM628 User Command Set
Note 4: コマンドはモータ動作中に実行可能
Note 5: コマンドはモータ動作中に実行不可
Note 6: 加速度が変わらなければ、コマンドはモータ動作中に実行可能
Note 7: コマンドポートからのステイタスバイトの読み出しは、ハードウェアによってサポートされているので、コマンドはコードを必要としません。
ユーザ・コマンド・セット
概要
このパラグラフでは LM628のユーザ・コマンド・セットについて説明します。いくつかのコマンドは単独で使えますが、それ以外はデータを必要とします。例えば、コマンドSTT (STarT動作 )はデータを必要としませんが、コマンドLFIL (Load FILterパラメータ )はデータ(微分項のサンプリング周期と(あるいは )フィルタ・パラメータ )が必要です。
コマンドは機能ごとに分かれています。つまり、イニシャライズ、割り込み制御、フィルタ制御、軌跡制御、データ・レポートです。これらのコマンドは Table 2にリストされており、以下のパラグラフで説明します。各コマンドの名称に沿って、そのコマンド・バイト・コード、読み出し / 書き込みする場合のデータ・バイトの必要数、モータ動作中にそのコマンドが実行できるか否かのコメントが記述されています。
イニシャライゼーション・コマンド次の 4コマンドはシステムを初期設定するために使用されます。
RESET COMMAND: RESET THE LM628
コマンド・コード : 00 Hex
データバイト : 無
モータ動作中のコマンドの実行 : 可能
このコマンド (およびピン 27のハードウェア・リセット入力 )は、以下のデータをゼロにするだけです。つまり、フィルタ・パラメータとその入力バッファ、軌跡パラメータとその入力バッファ、モータ制御出力です。モータ制御出力がゼロのとき、オフセット・バイナリ・コードでスケールは半分になります (つまり、8ビット出力モードでは80Hex、12 ビット出力モードでは 800Hex です )。リセットの間、DACポートは 12ビットDACを "ゼロ "にするため 800Hexを出力し、8ビットDACをゼロにするため 80Hexを出力します。このコマンドは、また割り込みをマスクするコマンドMSKIの 6ビットデー
タのうち5ビットを (マスクしないように )クリアします。ここでSBPA/
SBPR割り込み (ブレークポイント・インタラプト)のみがマスクされます。その他に、このコマンドは出力ポートのサイズを 8ビットに設定し、現在の絶対位置を "HOME"として定義します。いかなる時でも実行されるこのリセットは 1.5ms以内で完了します。コマンド PORT8とコマンド PORT12も参照してください。
PORT8 COMMAND: SET OUTPUT PORT SIZE TO 8BITS
コマンド・コード : 05 Hex
データバイト: 無
モータ動作中のコマンドの実行 : 不可能
LM628 のデフォルト出力 (コマンドによって指定されないときの出力 )のポートサイズは 8ビットです。つまり、8ビットDACを使用するとき、PORT8コマンドを実行する必要はありません。12ビットDACを使用するときは、このコマンドを実行してはいけません。そうしたときは、モータの動作が不定、かつ予測のつかないものとなります。LM629、つまりLM628の PWM出力バージョンを使用する場合は、8ビット出力ポートサイズを選択します。
PORT12 COMMAND: SET OUTPUT PORT SIZE TO 12BITS
コマンド・コード : 06 Hex
データバイト: 無
モータ動作中のコマンドの実行 : 不可能
12ビットDACを使用するとき、コマンド PORT12は、始動プロセスの初期に実行されなければなりません。このコマンドの使用はシステム・ハードウェアによって必然的に決定されるため、ユーザは後でこのコマンドの使用だけはあらかじめ知ることになります。RESETコマンドが発行されるならば (8ビット出力がデフォルト出力として選択されるため )、コマンド PORT12は直ちに実行されなければなりません。このコマンドは、8ビットDAC、または LM629を使用するときには使用してはなりません。
Command Type Description Hex Data NoteBytes
SBPR Interrupt Set Breakpoint, Relative 21 4 1
MSKI Interrupt Mask Interrupts 1C 2 1
RSTI Interrupt Reset Interrupts 1D 2 1
LFIL Filter Load Filter Parameters 1E 2 to 10 1
UDF Filter Update Filter 04 0 1
LTRJ Trajectory Load Trajectory 1F 2 to 14 1
STT Trajectory Start Motion 01 0 3
RDSTAT Report Read Status Byte None 1 1, 4
RDSIGS Report Read Signals Register 0C 2 1
RDIP Report Read Index Position 09 4 1
RDDP Report Read Desired Position 08 4 1
RDRP Report Read Real Position 0A 4 1
RDDV Report Read Desired Velocity 07 4 1
RDRV Report Read Real Velocity 0B 2 1
RDSUM Report Read Integration Sum 0D 2 1

13 www.national.com/JPN/
LM
628/LM
629
イニシャライゼーション・コマンド (つづき )
DFH COMMAND: DEFINE HOME
コマンド・コード : 02 Hex
データバイト : 無
モータ動作中のコマンドの実行 : 可能
このコマンドは現在位置を"HOME"あるいは絶対位置ゼロ(0)に設定します。DFHコマンドがモータ動作中に実行されると、STT
コマンドが実行されない限りは、動いているモータの停止位置は変わりません。
割り込み制御コマンド以下の 7 つのユーザ・コマンドは、ホスト・コンピュータに割り込みするために使われる条件と関係があります。ピン 17によってホスト・コンピュータに実際に割り込みするための条件としては、コマンドMSKIと関連する割り込みマスクデータの中の相当するビットを、ロジック"HIGH"(マスクされない状態 )にすることが必要です。
すべての割り込みの役割は、ステイタスバイトを読み出して調べ、それをホスト・コンピュータに知らせることです。コマンドMSKIによって、すべての割り込みがマスクされない状態でも (割り込み可能でも )、それぞれの割り込み条件の状態はステイタスバイトの中に現されています。この特長により、割り込みを実行するのとは反対に、LM628はステイタス情報をポーリング可能にします。
SIP COMMAND: SET INDEX POSITION
コマンド・コード : 03 Hex
データバイト : 無
モータ動作中のコマンドの実行 : 可能
このコマンドが実行されると、次のインデックス・パルス入力は絶対位置に相当し、その位置はインデックス・レジスタに記録されます。ステイタスバイトのビット3は "HIGH"にセットされます。エンコーダ位相入力とインデックス・パルス入力の双方が "LOW"になるとき、この位置が記録されます。ユーザは、インデックス・パルスを持った "HOME"位置 (コマンドDFHを参照 )の精度をより高めるために、このレジスタを読み出せます (コマンド RDIPを参照 )。インデックス・パルスの発生を知らせるために、ユーザは LM628がホスト・コンピュータに割り込みするように設定できます。コマンドMSKI
とコマンドRSTIを参照してください。
LPEI COMMAND: LOAD POSITION ERROR FORINTERRUPT
コマンド・コード : 1B Hex
データバイト : 2
データ範囲 : 0000~ 7FFF Hex
モータ動作中のコマンドの実行 : 可能
(ループ・サミング・ジャンクションの出力における )過大な位置エラーは、重大なシステム上の問題を示しています。例えば、ロータの停止などです。LPEIの機能は、位置エラーを検出するために、入力にスレッショルドを設定します。位置エラーの絶対値がスレッショルドを超えたときエラーが検出されます。このスレッショルドは "HIGH"にセットされたステイタスバイトのビット5に現れます。
位置エラーが大きすぎてモータを停止させたい場合、コマンドLPESを使用してください。コマンド LPEIによってスレッショルド・データが書き込まれる順番は上位バイトからです。過大な位置エラーの発生を知らせるために、ユーザは LM628 がホスト・コンピュータに割り込みするように設定できます。コマンドMSKIとコマンドRSTIを参照してください。
LPES COMMAND: LOAD POSITION ERROR FORSTOPPING
コマンド・コード : 1A Hex
データバイト: 2
データ範囲 : 0000~ 7FFF Hex
モータ動作中のコマンドの実行 : 可能
LPESの機能は基本的に LPEIと同じですが、過大な位置エラーを検出したときに、モータを停止させる機能が付け加えられています。このとき、モータのドライバは実際オフにせず、オフセット・バイナリでゼロになるように、ハーフ・スケールに設定します。LPEI
と同様に、ステイタスバイトのビット5が "HIGH"にセットされます。コマンド LPES によってスレッショルド・データが書き込まれる順番は上位バイトからです。過大な位置エラーの発生を知らせるために、ユーザは LM628がホスト・コンピュータに割り込みするように設定できます。コマンドMSKIとコマンドRSTIを参照してください。
SBPA COMMAND:
コマンド・コード : 20 Hex
データバイト: 4
データ範囲 : C0000000~ 3FFFFFFF Hex
モータ動作中のコマンドの実行 : 可能
このコマンドは絶対位置に関して、限界点を設定します。限界点に達したとき、ステイタスバイトのビット6が "HIGH"にセットされます。この機能は軌跡と (あるいは )フィルタ・パラメータの信号をアップデートするのに使用されます。位置に達したことを知らせるために、ユーザは LM628 がホスト・コンピュータに割り込みするように設定できます。コマンドMSKIとコマンドRSTIを参照してください。
SBPR COMMAND:
コマンド・コード : 21 Hex
データバイト: 4
データ範囲 : 説明を参照
モータ動作中のコマンドの実行 : 可能
このコマンドは相対位置に関して、限界点を設定します。コマンド SBPAと同様に、限界点位置 (目標位置に対する相対的な現在位置 )に達したとき、ステイタスバイトのビット6が "HIGH"にセットされます。つまり、この相対的限界点の入力値がシステムの絶対位置範囲内 (C0000000~ 3FFFFFFFHex)にある目標位置に加えられたとき上記のようになります。この機能は軌跡と ( あるいは )フィルタ・パラメータの信号をアップデートするのに使用されます。限界点位置に達したことを知らせるために、ユーザは LM628
がホスト・コンピュータに割り込みするように設定できます。コマンドMSKIとコマンドRSTIを参照してください。

14www.national.com/JPN/
LM
628/
LM
629
割り込み制御コマンド (つづき )
MSKI COMMAND: MASK INTERRUPTS
コマンド・コード : 1C Hex
データバイト : 2
データ範囲 : 説明を参照
モータ動作中のコマンドの実行 : 可能
このコマンドはホスト・コンピュータに起こり得る、割り込み条件をユーザに決定させるものです。ステイタスバイトのビット1~ 6はホスト割り込みする可能性のある6種類の条件を示しています。割り込みが発生すると、続いてホスト・コンピュータは、発生した状態を認識するためにステイタスバイトを読み出します。次に、MSKI
コンピュータは 2データバイトによって直ちにフォローされることに注意してください。2 番目の ( 下位 )バイトのビット1~ 6は、各々の割り込みのマスクされた、あるいはマスクされない状態を決定します。この 6ビット・フィールドのどれかがゼロになれば、相当する割り込み条件をマスクします。つまり、いかなるビットも割り込みが可能です。このとき、2バイトからなる他のビットには何ら影響はありません。このマスクはホスト割り込み過程のみをコントロールします。ステイタスバイトを読み出すのは、マスクバイトとは関係のない実際の条件を知るためのものです。Table 3 を参照してください。
TABLE 3. Mask and Reset Bit Allocations for Interrupts
RSTI COMMAND: RESET INTERRUPTS
コマンド・コード : 1D Hex
データバイト : 2
データ範囲 : 説明を参照
モータ動作中のコマンドの実行 : 可能
Table 3 の割り込み条件のうち、1 つの割り込みが発生したとき、コマンドRSTIはステイタスバイト中の割り込みされているフラッグ・ビットをリセットします。それらを同時にリセットすれば、ユーザによってプログラムされた順序にしたがって、それらを同時にホスト・コンピュータで処理できます。MSKIコマンドと同様に、2番目の(下位 )バイトのビット1~ 6は、Table 3に示されている割り込み状態に一致します。また、RDSTATコマンドも参照してください。この 6ビット・フィールドのどれかがゼロになれば、相当する割り込み条件をリセットします。残りのビットには何ら影響はありません。
フィルタ制御コマンドここでは 2つのユーザコマンドが用意されています。どちらも、微分項のサンプリング周期を設定するためのものです。その目的は、システムを調整するためとこれらのシステム変更のタイミングを制御するために、フィルタのパラメータを調整することです。
LFIL COMMAND: LOAD FILTER PARAMETERS
コマンド・コード : 1E Hex
データバイト: 2~ 10
データ範囲 :
フィルタ制御ワード : 説明を参照フィルタ系数 : 0000~ 7FFF Hex (正のみ )
積分範囲 : 0000~ 7FFF Hex (正のみ )
モータ動作中のコマンドの実行 : 可能
ループ補償を制御するために LM628に書き込まれるフィルタ・パラメータ ( 係数 )は、kp、ki、kdと il (Integration Limit)です。Integration Limit ( 積分範囲 ) il は積分項 (Eq. 1を参照 ) が、ユーザが設定した最大値と等しいか、または小さい値になるように制限するものです。この範囲は積分を最小にするものであり、あるいは "WIND-UP"( モータの全体動作のオーバーシュートによる影響 )をリセットするものです。正のみの入力値は積分項の絶対値に相当します。積分項の値が ilを超えるとき、(固有の Sign
を持った ) ilの値は、微積分の値に置き代わります。
微分項のサンプリング周期はこのコマンドによってプログラム可能です。コマンドコードを書き込んだ後、その最初の 2 つのデータバイトは微分項のサンプリング周期を規定します。4つのフィルタ・パラメータのうちどれか (1 つあるいは複数 ) が、入っているデータバイトによって書き込まれることになります。書き込まれる順は上位バイトからです。このように 2 つのデータバイトは、その種類と数量の情報をLM628に伝達するフィルタ制御ワードによって構成されています。Table 4を参照してください。
TABLE 4. Filter Control word Bit Allocation
ビット 8 ~ 15 は微分項のサンプリング周期を選択するものです。Table 5を参照してください。ユーザは、フィルタ制御コマンドが連続して書き込まれている間に、これらのビットを一部的に SAVEして、かつ Restoreしなければなりません。
フィルタ制御ワードのビット4~ 7は使われません。
ビット 0~ 3は、書き込まれる直前のフィルタ・パラメータ・ワードをその数を問わず LM628に通知します。ここで、ユーザはフィルタ・パラメータのうち、いくつをアップデートするか (あるいはしないか )の選択をします。この選択は、フィルタ制御ワードに一致するビット位置で、ロジック信号によって行われます。
Bit Position FunctionBits 15 thru 7 Not Used
Bit 6 Breakpoint Interrupt
Bit 5 Position-Error Interrupt
Bit 4 Wrap-Around Interrupt
Bit 3 Index-Pulse Interrupt
Bit 2 Trajectory-Complete Interrupt
Bit 1 Command-Error Interrupt
Bit 0 Not Used
Bit Position FunctionBit 15 Derivative Sampling Interval Bit 7
Bit 14 Derivative Sampling Interval Bit 6
Bit 13 Derivative Sampling Interval Bit 5
Bit 12 Derivative Sampling Interval Bit 4
Bit 11 Derivative Sampling Interval Bit 3
Bit 10 Derivative Sampling Interval Bit 2
Bit 9 Derivative Sampling Interval Bit 1
Bit 8 Derivative Sampling Interval Bit 0
Bit 7 Not Used
Bit 6 Not Used
Bit 5 Not Used
Bit 4 Not Used
Bit 3 Loading kp Data
Bit 2 Loading ki Data
Bit 1 Loading kd Data
Bit 0 Loading il Data

15 www.national.com/JPN/
LM
628/LM
629
割り込み制御コマンド (つづき )
決められたデータバイトと直ちにそれに続くフィルタ制御ワードは16
ビットワードを構成するペアとして書き込まれます。LM628へ送るデータワードの順序は、フィルタ制御ワードの説明にあるように下向きの順序になります。例えば、kpから始まりki、kd、ilの順序になります。各々のワードの順序は上位バイトから始まります。ワード(2バイト)を書き込む前に、読み込むべきステイタスバイトのビジービットをチェックする必要があります。必要なデータは上記に述べた操作によって、ダブルバッファ構成の最初のバッファに書き込まれます。つまり、UDFコマンドが実行されるまで、データは 2 番目の ( 動作している ) レジスタに伝送されません。これによってLM628を有利に使用できます。つまり、ユーザは実際に使用する前に大量なデータを入力できます。この簡単なパイプライン効果によりホスト・コンピュータのデータ通信での障害を和らげるとともに、同期式多軸制御システムをより簡単に作れます。
UDF COMMAND: UPDATE FILTER
コマンド・コード : 04 Hex
データバイト : 無
モータ動作中のコマンドの実行 : 可能
UDFコマンドはフィルタ・パラメータとLFILコマンドによってプログラムされたものの特性をアップデートするために使用します。いくつかの、あるいはすべてのパラメータ(微分項、kp、ki、kd、il)は適切なコマンドによって変更可能ですが、フィルタのアップデートは不安定な現像またはスプリアスを減らすための計算と同期しています。
軌跡制御コマンド以下の 2 つのユーザコマンドは軌跡制御パラメータ ( 位置、速度、加速度 )、動作モード (位置または速度 )、方向 (速度モードのみ )を設定するために使われます。これらは、希望するモータ動作を設定するため、あるいはマニュアル停止モードを選択するために必要です。また、これらのシステムの変化するタイミングを制御するためにも必要です。
LTRJ COMMAND: LOAD TRAJECTORY PARAMETERS
TABLE 5. Derivative-Term Sampling Interval Selection Codes
Note 8: 記載の各サンプリング周期は 8.0MHzのクロック周波数動作時のものです。256μsは 2048/8MHzに相当します。他のクロック周波数の場合は、サンプリング周期のスケーリングが必要です。
モータ動作を制御するために LM628に書き込まれる軌跡制御パラメータは、加速度、速度、位置です。それに加えて、これら 3
パラメータが絶対入力であろうとそれに関する指示はこのコマンドによってプログラム可能です。同様に、速度モードの選択と方向、マニュアル停止モードの選択と実行、これらもこのコマンドによってプログラム可能です。このコマンドコードを書き込んだ後、最初の2 データバイトはパラメータの変化を規定します。書き込まれる順は上位バイトからです。このように 2 つのデータバイトはその種類と数量の情報を LM628に伝達する軌跡制御ワードによって構成されています。Table 6を参照してください。
TABLE 6. Trajectory Control Word Bit Allocation
ビット 12 は速度モードのとき、モータの方向を設定します。このビットをロジック1にセットすれば正方向になります。このビットは位置モードのときには機能しません。
ビット11は、LM628を速度モード (ビット11-ロジック1)、あるいは位置モード (ビット11-ロジック0)に設定します。
コマンド・コード : 1F Hex
データバイト: 2~ 14
データ範囲 :
軌跡制御ワード : 説明を参照位置 : C0000000~ 3FFFFFFF Hex
速度 : 00000000~ 3FFFFFFF Hex
(正のみ )
加速度 : 00000000~ 3FFFFFFF Hex
(正のみ )
モータ動作中のコマンドの実行 : 説明を参照
Bit Position Selected Derivative
15 14 13 12 11 10 9 8 Sampling Interval
0 0 0 0 0 0 0 0 256 μs
0 0 0 0 0 0 0 1 512 μs
0 0 0 0 0 0 1 0 768 μs
0 0 0 0 0 0 1 1 1024 μs, etc…
thru 1 1 1 1 1 1 1 1 65,536 μs
Bit Position Function
Bit 15 Not Used
Bit 14 Not Used
Bit 13 Not Used
Bit 12 Forward Direction (Velocity Mode Only)
Bit 11 Velocity Mode
Bit 10 Stop Smoothly (Decelerate as Programmed)
Bit 9 Stop Abruptly (Maximum Deceleration)
Bit 8 Turn Off Motor (Output Zero Drive)
Bit 7 Not Used
Bit 6 Not Used
Bit 5 Acceleration Will Be Loaded
Bit 4 Acceleration Data Is Relative
Bit 3 Velocity Will Be Loaded
Bit 2 Velocity Data Is Relative
Bit 1 Position Will Be Loaded
Bit 0 Position Data Is Relative
Bit Position Function

16www.national.com/JPN/
LM
628/
LM
629
軌跡制御コマンド (つづき )
ビット8~ 10はモータを停止する方法を選択するために使用します。つまり、モータドライブ出力をターンオフする ( モータにゼロドライブを与えるためオフセット・バイナリコードを出力する )ことによってモータを停止させます。ビット9はモータを突然停止させる方法が設定されます (最大加速度で、現在位置に等しくなる目標位置を設定します )。ビット 10 はユーザがプログラムした現在の加速度を利用して、モータをスムーズに停止させる方法を設定します( 普通のモータ停止 )。ビット8~ 10は排他的に使用すべきで、いかなる場合でも1つのビットのみがロジック1になるべきです。
ビット0~ 5は、書き込まれる直前の軌跡制御パラメータをその数を問わず LM628に通知します。また、ビット0~ 5は割り込みされるべきデータを、絶対的に割り込みされるのか、相対的に割り込みされるのかを問わず、LM628に通知します。ユーザは軌跡パラメータのうち、いくつアップデートするか (あるいはしないか )を選択します。この選択は、一致するビット位置に置いて、それをロジック1にセットすると行われます。パラメータはモータが動作していても変更可能です。しかし、加速度が変更されたとき、LM628 が現在の動作を完了しない限り、またはマニュアル停止させられない限り、次に述べるSTTコマンドは機能しません。
指定したデータバイトと直ちに続く軌跡制御ワードは、16 ビット構成のペアに書き込まれます。各々のデータ項目 (パラメータ )には2 つの 16ビットワードが必要です。また、ワードとバイトの順序は上位から下位の順になっています。LM628に送るパラメータの順序は、上記の軌跡制御ワードにあるようにビット位置をカウントダウンする方向です。例えば、加速度から始まり、速度、位置と続きます。
加速度と速度は 32ビット(正のみ )精度ですが、範囲は0 (00000000Hex)~ 230- 1 (3FFFFFFF Hex)です。両方とも下位 16ビットは、分数データとして丸められます。従って、これらのパラメータの下位整数データは、(0~ 31のビットのうち )ビット16
です。計算された速度をコード化するために、例えば、希望速度 (カウント /サンプル周期 )に 65,536をかけて、最後にバイナリコードに変換します。加速度の単位はカウント/カウント/サンプルです。位置は 32ビット整数ですが、その範囲は- 230 (C0000000 Hex)~ 230- 1 (3FFFFFFF Hex)です。
上記に述べた操作によって、必要なデータはダブルバッファ構成の最初のバッファに書き込まれます。つまり、STTコマンドが実行されるまで、データは 2番目の (動作している )レジスタに伝送されません。これは有利な点で、ユーザが実際に使用する前に大量のデータを入力できるからです。この簡単なパイプライン効果によって、ホスト・コンピュータのデータ通信における障害を和らげるとともに同期式多軸制御システムをより簡単に作れます。
STT COMMAND: START MOTION CONTROL
コマンド・コード : 01 Hex
データバイト: 無
モータ動作中のコマンドの実行 : 加速度が変わらなければ可能
STTコマンドは、希望する軌跡とLTRJコマンドによってプログラムされる軌跡のスペックを実行するために使われます。多軸制御の同期 (1サンプル周期以内 )をとるためには、各々の (およびすべての ) 軸のために必要な軌跡パラメータをロードし、同時に、すべての軸に単独の STT コマンドを実行します。このコマンドは、ある条件下を除いていつでも実行可能です。その禁止条件とは、加速度が変化して、かつ軌跡が完了していない場合、あるいは加速度が変化して、かつモータがマニュアル停止していない場合です。STTコマンドがモータ動作中に実行され、かつ加速度が変化している場合は、コマンド・エラーの割り込みが発生し、このコマンドは無効となります。
データ・レポーティング・コマンド以下の 7つのユーザコマンドはLM628の内部レジスタからデータを得るために使用します。ステイタス、位置、速度の情報が伝送されます。RDSTAT を除いて、最初にコマンドポートに一致するコマンドを書き込んだ後、このデータが LM628のデータポートから読み出されます。
RDSTAT COMMAND: READ STATUS BYTE
コマンド・コード : 無
読み出しバイト: 1
データ範囲 : 説明を参照
モータ動作中のコマンドの実行 : 可能
RDSTAT コマンドは本来コマンドではありませんが、他のコマンドとともにここに載せているのは、ホスト・コンピュータとの通信を制御するのに常に使われるからです。このコマンドには、自己識別コードがありません。コマンドは直接ハードウェアによってサポートされ、いつでも実行可能です。ステイタスを読み出す 1つのバイトは、CS、PS、RDをすべてロジック "ゼロ "にセットすると選択されます。Table 7を参照してください。
TABLE 7. Status Byte Bit Allocation
ビット7はモータオフ・フラッグで、(出力がオフセット・バイナリコードにおいてゼロになるようなハーフスケールにおいて)モータドライブ出力をオフします。以下の条件のいずれかによってモータは回転を止めます。つまり、パワーアップ・リセット、コマンド RESET 過度のエラー(コマンド LPESが実行されているとき )、あるいはモータのマニュアル停止のためにコマンド LTRJ が使われた場合などです。
Bit Position Function
Bit 7 Motor Off
Bit 6 Breakpoint Reached [Interrupt]
Bit 5 Excessive Position Error [Interrupt]
Bit 4 Wraparound Occurred [Interrupt]
Bit 3 Index Pulse Observed [Interrupt]
Bit 2 Trajectory Complete [Interrupt]
Bit 1 Command Error [Interrupt]
Bit 0 Busy Bit

17 www.national.com/JPN/
LM
628/LM
629
軌跡制御コマンド (つづき )
マニュアル・モータオフ・ストップするために、コマンドLTRJとともにビット7がセットされたとしても、コマンド STTがモータ停止時に実行されない限り、ビット 7 は実際に機能しないことに注意してください。上記以外の条件では、ビット 7はコマンド STTによってクリアされます。
ビット 6 は、限界点に達したときのフラッグで、位置がコマンドSBPA、あるいは SBPRによってロードされた限界点を越えたとき、ビット6はロジック1にセットされます。このフラッグは、ステイタスをマスクするホスト・インタラプトとは別の機能で、ビット6はコマンドRSTIによってクリアされます。
ビット 5 は過度の位置エラー発生時の割り込みフラッグで、位置エラーの割り込み条件を満たすときに、ロジック1にセットされます。エラーが、コマンド LPEI、あるいは LPESによってロードされたスレッショルドを超えたとき、このフラッグは発生します。このフラッグはステイタスをマスクするホスト・インタラプトとは別の機能で、ビット5はコマンドRSTIによってクリアされます。
ビット4は、ラップアラウンド・フラッグで、数値の "ラップアラウンド "が発生したとき、ロジック1にセットされます。 "ラップアラウンド "とは位置データが LM628 の位置アドレス空間を超えることを意味し、速度モードの間に起こります。ラップアラウンドが発生したとき、位置情報はエラーの中にあり、ユーザはこのインタラプトによって正確な位置データを確認できます。このフラッグはステイタスをマスクするホスト・インタラプトとは別の機能で、ビット4はコマンドRSTIによってクリアされます。
ビット3は、インデックス・パルスの後に出る割り込みフラッグで、(コマンド SIPが実行されて )インデックス・パルスが発生したときロジック1にセットされ、インデックス位置レジスタがアップデートされたことを示します。このフラッグは、ステイタスをマスクするホスト・インタラプトとは別の機能で、ビット3はコマンド RSTIによってクリアされます。
ビット 2 は軌跡終了時の割り込みフラッグで、LTRJコマンドによってプログラムされ、かつ STTコマンドによってイニシャライズされた軌跡が最終点に達したとき、ロジック1にセットされます。オーバーシュート、あるいは (モータの能力を超えて速度を設定するような )
限界条件のため、モータがまだ最終指定位置にない場合があります。このビットは信号レジスタのビット7とビット10の "OR"そのものです。次のコマンドRDSIGSを参照してください。このフラッグは、ステイタスをマスクするホスト・インタラプトとは別の機能です。ビット2はコマンドRSTIによってクリアされます。
ビット1はコマンドエラー割り込みフラッグで、書き込みが適切 (あるいは不適切 ) だった場合で、ユーザがデータを読み出そうとしたときに、ロジック 1にセットされます。このフラッグは、ステイタスをマスクするホスト・インタラプトとは別の機能です。ビット1はコマンドRSTIによってクリアされます。
ビット0はビジーフラッグで、データの書き込みと読み出しの前にステイタスが "Busy"か "Ready"かを確認するために (ホスト・コンピュータのプログラムを使って )ユーザがしばしばテストするために使います。このような書き込みと読み出しは、ビット 0 がロジック・ゼロ (ビジーではない状態 ) のとき実行されます。ビジービットが"HIGH"のとき、いかなるコマンド、あるいはデータの書き込みも無効となります。データの読み出しについては、ビジービットが"HIGH"のとき、現在の I/Oポート・バッファの中身を読み出すのであって、ホスト・コンピュータによって計算された予測値を読むのではありません。このような (ビジービットが "HIGH"のときの )読み出しや書き込みは、コマンドエラー割り込みを生じません。
RDSIGS COMMAND: READ SIGNALS REGISTER
コマンド・コード : 0C Hex
読み出しバイト: 2
データ範囲 : 説明を参照
モータ動作中のコマンドの実行 : 可能
LM628の内部信号レジスタは、このコマンドを使用して読み出します。読み出す順は上位バイトからです。 (0を除いた )このレジスタの 2番目のバイトはステイタスバイトを繰り返したものです。Table
8を参照してください。
TABLE 8. Signals Register Bit Allocation
ビット15はホスト割り込みフラッグで、ホスト・インタラプト出力 (ピン 17)がロジック1になったときに、ビット15もロジック1にセットされます。ピン 17は、6つのホスト割り込み条件のどれかが発生したとき (一致する割り込み条件がマスクされていないとき )、ロジック1にセットされます。ビット15 (とピン 17)はコマンドRSTIによってクリアされます。
ビット 14は加速度検出フラッグで、加速データが LM628に書き込まれたとき、ロジック1にセットされます。ビット14は STTコマンドによってクリアされます。
ビット13はUDF検出フラッグで、UDFコマンドが実行されたとき、ロジック 1にセットされます。ビット13はそれがセットされているサンプリング周期の終わりでクリアされるため、この信号はとても短く、モニタリングにはあまり役に立ちません。
ビット12は正方向フラッグで、LM628 が速度モードのとき役立ちます。このビットはモータの方向が正方向を示すときロジック 1 にセットされ、"逆方向 "ではロジック0になります。ビット12はコマンド LTRJによってセットされクリアされます。コマンド STTが実行されない限り、ビット12の実際のセットとクリアはなされません。
ビット11は速度モード・フラッグで、ユーザが (コマンド LTRJによって ) 速度モードを選択したことを示すためにロジック 1にセットされます。ビット11は (コマンド LTRJによって )位置モードが選択されたときにクリアされます。コマンド STTが実行されない限り、ビット11の実際のセットとクリアは行われません。
ビット 10はオン・ターゲット・フラッグで、軌跡ジェネレータが最後に実行された STTコマンドによる仕事を終えたときにロジック 1にセットされます。ビット10は次の STTコマンドによってクリアされます。
Bit Position FunctionBit 15 Host Interrupt
Bit 14 Acceleration Loaded (But Not Updated)
Bit 13 UDF Executed (But Filter Not yet Updated)
Bit 12 Forward Direction
Bit 11 Velocity Mode
Bit 10 On Target
Bit 9 Turn Off upon Excessive Position Error
Bit 8 Eight-Bit Output Mode
Bit 7 Motor Off
Bit 6 Breakpoint Reached [Interrupt]
Bit 5 Excessive Position Error [Interrupt]
Bit 4 Wraparound Occurred [Interrupt]
Bit 3 Index Pulse Acquired [Interrupt]
Bit 2 Trajectory Complete [Interrupt]
Bit 1 Command Error [Interrupt]
Bit 0 Acquire Next Index (SIP Executed)

18www.national.com/JPN/
LM
628/
LM
629
軌跡制御コマンド (つづき )
ビット9はエラーによるターンオフ・フラッグで、コマンド LPESが実行されたとき、ロジック1にセットされます。ビット9はコマンド LPEI
によってクリアされます。
ビット8は 8ビット出力フラッグで、LM628がリセットされたとき、あるいはコマンド PORT8が実行されたとき、ロジック1にセットされます。ビット8はコマンド PORT12によってクリアされます。
ビット0~ 7は、ビット0を除いてステイタスバイトを繰り返したものです。ビット 0 は次のインデックスを取り込むフラッグで、コマンドSIP が実行されたときロジック 1にセットされます。つまり、次のインデックスパルスが発生しない限り、ビット0は "0"のままです。
RDIP COMMAND: READ INDEX POSITION
コマンド・コード : 09 Hex
読み出しバイト: 4
データ範囲 : C0000000~ 3FFFFFFF Hex
モータ動作中のコマンドの実行 : 可能
このコマンドは、インデックス・レジスタに記録された位置を読み取るものです。これによってシステムエラーをチェックできます。SIP
コマンドがいつ実行されようとも、インクリメンタル・エンコーダの分解能 (エンコーダ・ラインの 4逓倍 )によって得られる位置、つまり[新しいインデックス位置 -以前のインデックス位置]は常に整数です。ホスト・コンピュータによる計算のために RDIPコマンドを使用すれば、これらのデータの獲得が容易になります。このコマンドはまた、HOME、あるいは他の特別な位置を確認 /判別するためにも使われます。4 バイトの読み取りは上位バイトから下位バイトの順です。
RDDP COMMAND: READ DESIRED POSITION
コマンド・コード : 08 Hex
読み出しバイト: 4
データ範囲 : C0000000~ 3FFFFFFF Hex
モータ動作中のコマンドの実行 : 可能
このコマンドは、プロファイル・ジェネレータの目標 (現状 )位置出力を読み取ります。これはループ・サミング・ジャンクションへの"セットポイント"入力です。4バイトの読み取りは上位バイトから下位バイトの順です。
RDRP COMMAND: READ REAL POSITION
コマンド・コード : 0A Hex
読み出しバイト: 4
データ範囲 : C0000000~ 3FFFFFFF Hex
モータ動作中のコマンドの実行 : 可能
このコマンドはモータの現在の実行位置を読み取ります。これはループ・サミング・ジャンクションへのフィードバック入力です。4バイトの読み取りは上位バイトから下位バイトの順です。
RDDV COMMAND: READ DESIRED VELOCITY
コマンド・コード : 07 Hex
読み出しバイト: 4
データ範囲 : C0000001~ 3FFFFFFF
モータ動作中のコマンドの実行 : 可能
このコマンドは位置プロファイルを作り出すために使用する目標(瞬時 )速度を読み取ります。読み取り順は上位バイトからです。結果として、下位の 16ビットは小数点以下の速度を表します。し
たがって、それを整数速度値にするためには、得られた出力を65,536 (16ビット)で割り算することが必要です。
RDRV COMMAND: READ REAL VELOCITY
コマンド・コード : 0B Hex
読み出しバイト: 2
データ範囲 : C000~ 3FFF Hex、説明を参照
モータ動作中のコマンドの実行 : 可能
このコマンドはモータの実際 (瞬時 )の速度の整数部 (上位 2バイト ) を読み取るものです。この値に 65,536 (216) がかけられます。これは、コマンド RDDV を実行して得られた結果と比較するため、あるいは入力値と比較するために必要なスケーリングを行います。その結果、実際の速度には小数点以下はありません。読み取り順は上位バイトからです。
RDSUM COMMAND: READ INTEGRATION-TERMSUMMATION VALUE
コマンド・コード : 0D Hex
読み出しバイト: 2
データ範囲 : 00000 Hex~±積分範囲の現在値
モータ動作中のコマンドの実行 : 可能
このコマンドは積分項がその積分を完了し、その値を読み取ります。この値を読み取ることはシステムを最初に、あるいは広い範囲で調整するために有効です。
代表的なアプリケーション
LM628とホスト・コンピュータのハンドシェイク (割り込み )プログラム
LM628とホスト・コンピュータのハンドシェイクについてのいくつかのワードはシステムプログラマにとって役に立ちます。上記のテキストの各部で指摘しているように、LM628とホスト・コンピュータのハンドシェイクには 2つの方法があります。それは、ホスト・インタラプト出力による方法と割り込み条件のためにステイタスバイトをポーリングする方法です。ワイヤリングによる割り込み (ハードワイヤド・インタラプト)を使うとき、ステイタスバイトは割り込みを発生させる6種類の条件を規定するために読み出され、調べられます。
このハードワイヤド・インタラプトを使う場合、非常に重要なのは、割り込みが発生したとき、ホスト・インタラプト・サービス・ルーチンが進行状態にあるコマンド・シーケンスとインタフェースしないことです。ホスト・インタラプト・サービス・ルーチンが実行中のコマンドシーケンスの真ん中にある間、それが LM628へコマンドを発行するようなことがあれば、実行中のコマンドは中断され、アプリケーションに損傷を与えてしまいます。
この問題は 2つの方法で解決できます。1つは、ハードワイヤド・インタラプトを使うときでも、割り込みが LM628のコマンド・シーケンスを発行する前にホスト・コンピュータでディスエーブルされるようにすることです。それぞれのコマンド・シーケンスの前に再びイネーブルされます。もう1つの方法は、ハードワイヤド・インタラプトを使わず、"割り込み "状態のために LM628のステイタスバイトを登録することです。ステイタスバイトは、割り込みがマスクされているかいないかにかかわらず、常に割り込み条件を持っています。

19 www.national.com/JPN/
LM
628/LM
629
代表的なアプリケーション (つづき )
ホスト・コンピュータ /プロセッサとのインタフェース
LM628は 8ビット・パラレル・バスによってホスト・コンピュータ /プロセッサとインタフェースされます。Figure 12にインタフェースと最も簡単なシステムを示します。
Figure 12に見られるように、LM628はホストデータ、アドレス、コントロールラインとインタフェースしています。アドレスラインはLM628の CS入力を作るためにデコードされます。ホストアドレスの LSBは LM628の PS入力を直接ドライブします。Figure 12はまた、LM628と接続される8ビットDACとLM12パワー・オペアンプについても示しています。
LM628とハイパフォーマンス・コントローラ (HPC)のインタフェース
Figure 13に、NS社の HPCハイパフォーマンス・コントローラとインタフェースされるLM628を示しています。WRラインにつながっているディレイとロジック回路は (LM628で見られたように )、HPC
のWrite Data Hold Timeを長くするために使われます。時間を長くするのは効果的であり、これは WR パルスを早めに立ち上げると行われます。なお、HPCの CK2出力クロックが得られることに注目してください。74HC245 は、速いホストバスとインタフェースするとき必要な条件である Read Data Hold Timeを短くするために使われます。
12ビットDACとのインタフェース
Figure 14 に、LM628 と 12 ビット DAC の使用例を示します。74LS378HexゲートDフリップ・フロップとインバータは 12ビット出力をデマルチプレックスします。DAC のオフセット調整は、DAC
の直線性誤差と単調性誤差を最小にすると行なわれます。この調整には 2つの方法があります。DAC1210がソケットに差し込まれているならば、それから抜いて DACソケットのピン 11とピン 13
の間に 15kΩの抵抗を入れ、LF356のピン 6で 0Vになるように25kΩのポテンショメータを調整します。
DACを抜けないときは、2つ目の方法として DAC1210のすべての入力をコード・ゼロにします。これは適切にモータを動作させるためにコマンドによって LM628 の出力を調整しますが、システムエンコーダからのフィードバックはありません。すべてのゼロ・コードが現れると、LF356のピン6で0Vになるようにポットを調整します。
LM12パワーオペアンプの使用法
Figure 15に、LM12パワーオペアンプを使用したモータドライブ・アンプを示します。この回路はとても簡単で、30V で 8Aまで供給できます (LM12L/LM12CLを使用 )。抵抗 R1とR2の値は最大入力電圧で最大出力電圧を発する利得を設定するために選定されます。例えば、2.2の利得にすれば、± 10Vの入力電圧、± 30Vの電源電圧で、± 22Vの飽和出力が得られます。このアンプの利得は必要以上に高くしてはいけません。これは、飽和したときにシステムが非直線になるためであり、さらに利得自体はLM628 で制御できるからです。また、LM12 は電流ドライバとしても使用できます。
PWMモータドライブ・インタフェース
Figure 16に、小さなブラシ付きモータをドライブするためのスイッチモード・パワーアンプとして、LM18298デュアル・フルブリッジ・ドライバが LM629 PWM出力とインタフェースする方法を示します。
インクリメンタル・エンコーダ・インタフェース
インクリメンタル (位置フィードバック )エンコーダ・インタフェースは3ライン入力から構成されます。フェイズA (ピン 2)、フェイズB
(ピン 3)、インデックス (ピン 1) です。インデックス・パルス出力は、すべてのエンコーダが持っているとは限りません。したがって、LM628 ではインデックス・パルス出力を持っている、いないにかかわらず、どちらのエンコーダでも動作します。しかし、インデックス・パルスがない場合は (あるいは使わない場合にピン 1を"HIGH" に吊っておく、この入力の代わりの入力がない場合は )、コマンド SIPとRDIPは無意味になります。
ガウシアン・ノイズのある使用環境では、いくつかの注意が必要です。ノイズがエンコーダ入力 (1 入力、または 2 入力 )に入って、そのノイズによってエンコーダ・トランジションまでその入力値を保てないような場合、LM628のデコーダ・ロジック回路はノイズを除去します。擬示矩形カウントや尾を引くエンコーダ・トランジションをもたらすノイズは適切なEMI設計によって除去しなければなりません。
簡単なデジタル "フィルタリング "は時として、耐ノイズ性能を下げる場合があります ( フィルタが除去できるよりも長いパルスノイズは常にあります )。そのうえ、いかなるノイズ・フィルタもデコーダのバンド幅を狭める働きをします。LM628 ではデコーダが最大のバンド幅を得ることを重視して、あえてノイズフィルタを内蔵していません ( 簡単なフィルタでは問題を完全に解決できません )。大抵の場合、最も効果的な誘導ノイズ対策は平衡ライン・ドライバとエンコーダ入力にレシーバを使うことです。Figure 17に、DS26LS31
とDS26LS32を使用した回路を示します。

20www.national.com/JPN/
LM
628/
LM
629
代表的なアプリケーション (つづき )
Note:
FIGURE 12. Host Interface and Minimum System Configuration

21 www.national.com/JPN/
LM
628/LM
629
代表的なアプリケーション (つづき )
FIGURE 13. LM628 and HPC Interface

22www.national.com/JPN/
LM
628/
LM
629
代表的なアプリケーション (つづき )
*DA
C o
ffse
t m
ust
be
adju
sted
to
min
imiz
e D
AC
lin
eari
ty a
nd
mo
no
ton
icit
y er
rors
. See
tex
t.
FIG
UR
E 1
4.
Inte
rfac
ing
a 1
2-B
it D
AC
an
d L
M62
8

23 www.national.com/JPN/
LM
628/LM
629
代表的なアプリケーション (つづき )
FIGURE 15. Driving a Motor with the LM12 Power Op Amp
FIGURE 16. PWM Drive for Brush/Commutator Motors

24www.national.com/JPN/
LM
628/
LM
629
代表的なアプリケーション (つづき )
FIGURE 17. Typical Balanced-Line Encoder Input Circuit

25 www.national.com/JPN/
LM
628/LM
629
外形寸法図 特記のない限りinches (millimeters)
24-Lead Small Outline Package (M)Order Number LM629M-6 or LM629M-8
NS Package Number M24B
28 Lead Molded Dual-In-Line Package (N)Order Number LM628N-6, LM628N-8, LM629N-6 or LM629N-8
NS Package Number N28B

LM
628/
LM
629 高精度モーション・コントロール
IC
生命維持装置への使用について弊社の製品はナショナルセミコンダクター社の書面による許可なくしては、生命維持用の装置またはシステム内の重要な部品として使用することはできません。
1. 生命維持用の装置またはシステムとは (a)体内に外科的に使用されることを意図されたもの、または (b)生命を維持あるいは支持するものをいい、ラベルにより表示される使用法に従って適切に使用された場合に、これの不具合が使用者に身体的障害を与えると予想されるものをいいます。
2. 重要な部品とは、生命維持にかかわる装置またはシステム内のすべての部品をいい、これの不具合が生命維持用の装置またはシステムの不具合の原因となりそれらの安全性や機能に影響を及ぼすことが予想されるものをいいます。
本資料に掲載されているすべての回路の使用に起因する第三者の特許権その他の権利侵害に関して、弊社ではその責を負いません。また掲載内容は予告無く変更されることがありますのでご了承ください。
フリーダイヤル
ナショナルセミコンダクタージャパン株式会社本社/〒 135-0042 東京都江東区木場 2-17-16 TEL.(03)5639-7300
技術資料(日本語 /英語)はホームページより入手可能です。
www.national.com/JPN/
その他のお問い合わせはフリーダイヤルをご利用ください。
0120-666-116

IMPORTANT NOTICE