managing uncertainties in hardware-software codesign projects
DESCRIPTION
IFORS 2014TRANSCRIPT
Managing Uncertainties in
Hardware-Software Codesign Projects
Jones Albuquerque (DEINFO-UFRPE)
Ferrer-Savall, J. (ESAB-UPC)
Bocanegra, S. (DEINFO-UFRPE)
Ferreira, T. (DEINFO-UFRPE)
Lopez-Codina, D. (ESAB-UPC)
Coelho Jr, C. (DCC-UFMG)
July 17, 2014

Outline
• The problem
• Related works
• Stochastic model based on system views
• Design scenario analysis
• Some results
• Conclusions and future works
1
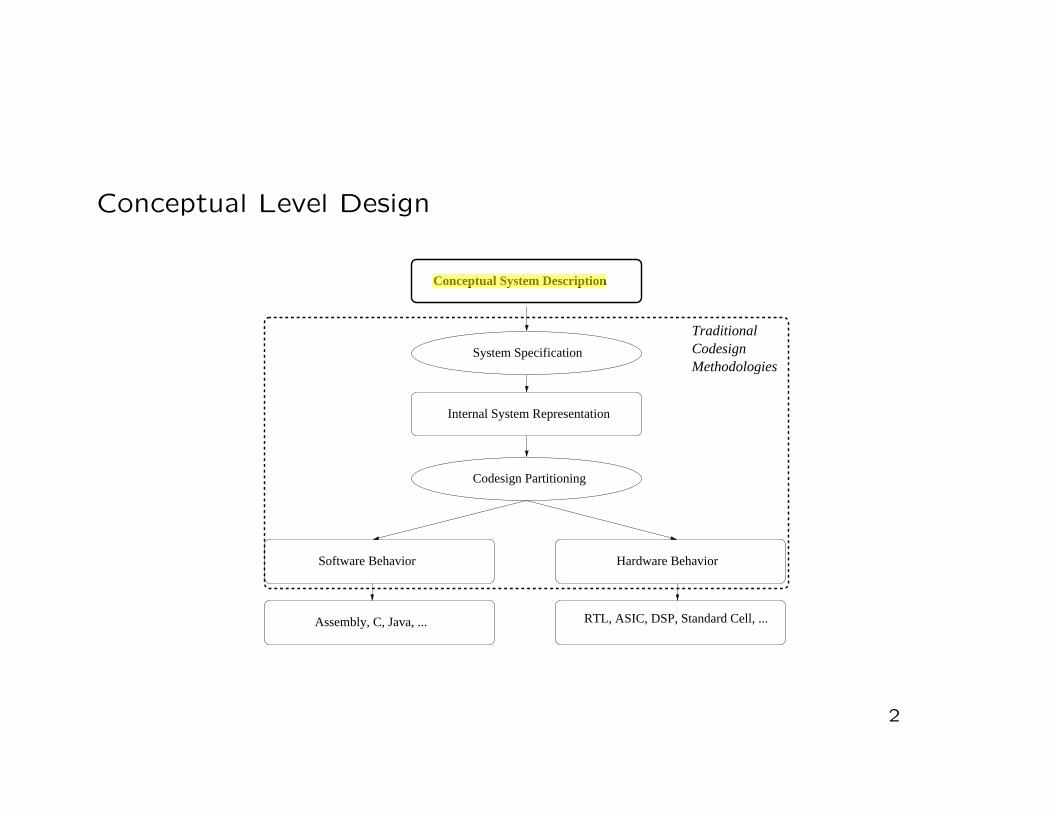
Conceptual Level Design
Conceptual System Description
System Specification
Internal System Representation
Codesign Partitioning
Software Behavior Hardware Behavior
RTL, ASIC, DSP, Standard Cell, ...Assembly, C, Java, ...
Traditional
MethodologiesCodesign
2

Design Space
DESIGNTOOLS
TARGET
DESIGN
SPACE
general−purpose
DSP system
C
C++
JAVA
TECHNOLOGIES
core−basic ASIC
Standard cell
Assembly
Multiprocessor
FPGA
Min cut
Simulated Annealing
manual partitioningILP
Scheduling Blocks
Formal verification
CONSTRAINTSOPTIMIZATIONCost
AreaPower Development time
Reuse
Latency
Re−programability
Technologies + Constraints + Tools
3

Team Space
DESIGNTOOLS
TARGET
DESIGN
SPACE
general−purpose
DSP system
C
C++
JAVA
TECHNOLOGIES
core−basic ASIC
Standard cell
Assembly
Multiprocessor
FPGA
Min cut
Simulated Annealing
manual partitioningILP
Scheduling Blocks
Formal verification
CONSTRAINTSOPTIMIZATIONCost
AreaPower Development time
Reuse
Latency
Re−programability
TEAMSDevelopment risk
Changes in teams
Task assignment
Team load
Design times
Group communication
Skills
Technologies + Constraints + Tools + TEAMS
4

The Problem
Analysis + Partitioning
Conceptual Design
Task Assignment Task Implementation
Team Technology Technology Implementation
(HW/SW Codesign)(Team Assignment)
5

Related Works/Tools
• Castle, Chinook, COMET, Cosmos, COSYMA, CoWare, LY-COS, Polis, PISH, Ptolemy, Symphony, Vulcan
• COSYMA, Chinook, and LYCOS present estimated analysisand quality profiles
• PISH makes formal verification of the synthesis process
• CASTLE considers teams as designers
• COMET does not require a functionally complete descriptionin its specification
6

Neglected Aspects
• System is implemented by teams detaining specific technolo-
gies
• No single person has a complete knowledge of the system
• Early design scenarios and risk analysis
• Team load and task assignment
• Process is not adjusted neither tuned during development
7

• IEEE/ACM CODES, group discussion:
”This part of system design is very guru-intense and
tool support is scarse”
Outline
• The problem
• Related works
• Stochastic model based on system views
• Design scenario analysis
• Some results
• Conclusions and future works
8
Team Estimates
• PSP (Personal Software Process, 1995), TSP (Team Soft-ware Process, 2000)
• PROBE for past task tracking based on linear regression(range and variance)
• Formally, given a set of historical data for variables x and y,to determine a likely value yk based on a known or estimatednew value xk we use
yk = β0 + xkβ1,
where the estimating parameters β0 and β1 are calculatedfrom the historical data
9
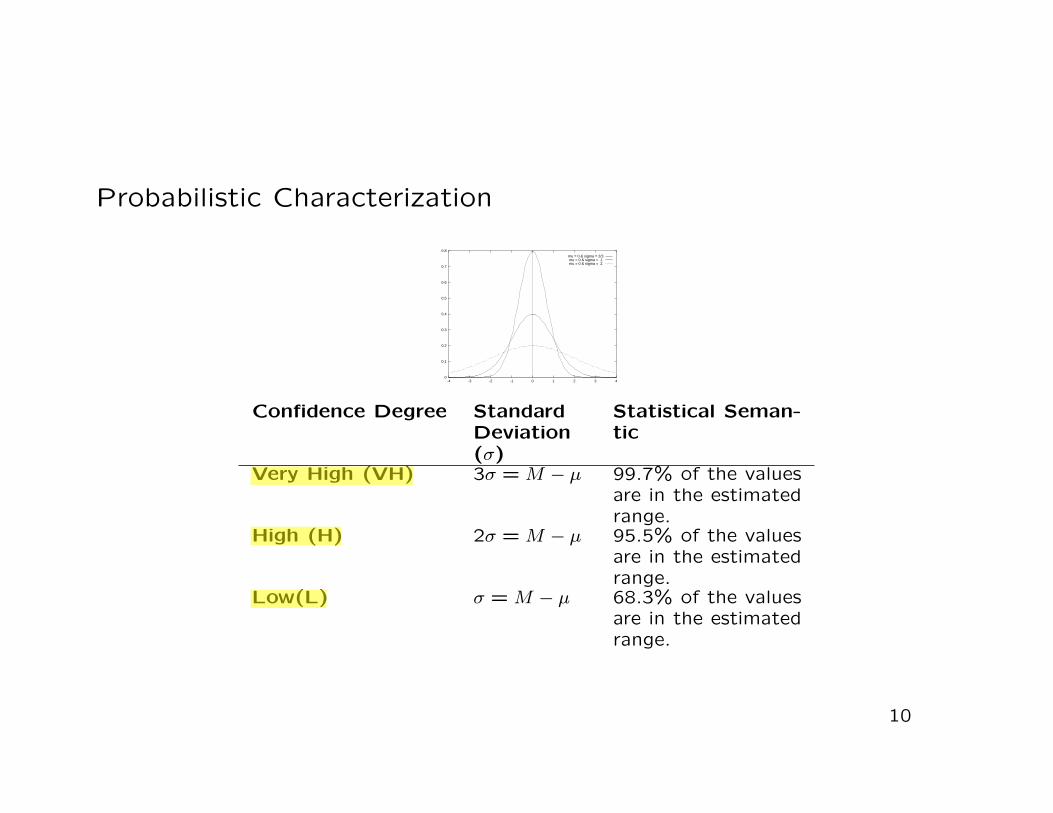
Probabilistic Characterization
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
-4 -3 -2 -1 0 1 2 3 4
mu = 0 & sigma = 2/3mu = 0 & sigma = 1 mu = 0 & sigma = 2
Confidence Degree StandardDeviation(σ)
Statistical Seman-tic
Very High (VH) 3σ = M − µ 99.7% of the valuesare in the estimatedrange.
High (H) 2σ = M − µ 95.5% of the valuesare in the estimatedrange.
Low(L) σ = M − µ 68.3% of the valuesare in the estimatedrange.
10

System Described by Views
• Hierarchical view: static objects and dependencies
• Sequencing view: dynamic constraints
• Development view: development dependencies
11

Network Controller
Host CPU
Memory
DMA-RCVD
RCVD-FRAME RCVD-BUFFER RCVD-BIT
DMA-XMIT XMIT-FRAME XMIT-BIT
ENQUEUE EXEC-UNIT
RXE
RXD
TXE
TXD
Execution Unit
Transmit Unit
Receive Unit
Bus Unit

Hierarchical View
12

Hierarchical Graph
Net Controller
Bus_Unit Receive_ Unit
Transmit_ Unit
Execution_ Unit
DMA-RCVD RCVD-FRAME
RCVD-BUFFER RCVD-BIT
DMA-XMIT XMIT-FRAME
XMIT-BIT
ENQUEUE
EXEC-UNIT
13

Sequencing View
RCVD_BIT:RXData
RCVD_BUFFER:RXByte
RCVD_FRAME:RxFrame
RCVD_DMA:DMA_write
<1us
BUS UNIT:bus_dma_write
14

Sequencing Graph
initial_method
final_method
rcvd_bit
rcvd_buffer
rcvd_frame
dma_rcvd
bus_dma_write
bus_dma_read
dma_xmit
xmit_frame
xmit_bit
bus_read/write
enqueue
exec_unit
< 1us < 1.2us< 5us
0 us
0 us
0.1us
0.1us
0.4us
0.4us
0.1us
0.3us
0.8us
2us
3us
15

Development View
Host CPU
Memory
DMA-RCVD
RCVD-FRAME RCVD-BUFFER RCVD-BIT
DMA-XMIT XMIT-FRAME XMIT-BIT
ENQUEUE EXEC-UNIT
RXE
RXD
TXE
TXD
Execution Unit
Transmit Unit
Receive Unit
Bus Unit
16

Development Graph
RCVD-
BIT
RCVD-
BUFFER
RCVD-
FRAME
RCVD-
DMA
DMA-
XMIT
XMIT-
FRAME
XMIT
BIT
ENQUEUE
EXEC-UNIT
BUS-UNIT
INITIAL-OBJECT
FINAL-OBJECT
8 weeks
7 weeks
9 weeks
10 weeks
0 weeks0 weeks
2 weeks 3 weeks 3 weeks
3 weeks 4 weeks
Receive Unit
Transmit_Unit
Execution_Unit
17

The Design Process using System Views
1. The system is described as a collection of interconnected objects (hierarchicalview) in compliance with system’s functional specification;
2. The sequential and development views of the system are determined by the projectmanager;
3. The main constraints of the system design are determined and annotated intheir respective views;
4. The system-level model is given to the development teams;
5. The development teams estimate values for each object and method consideringthe technology options and the team’s skill;
6. For each design scenario:The automatic tool will choose the best implementation con-sidering theobjective function, that must be optimized (cost function), andthe riskof success for satisfying the design constraints (inference de-grees).
18
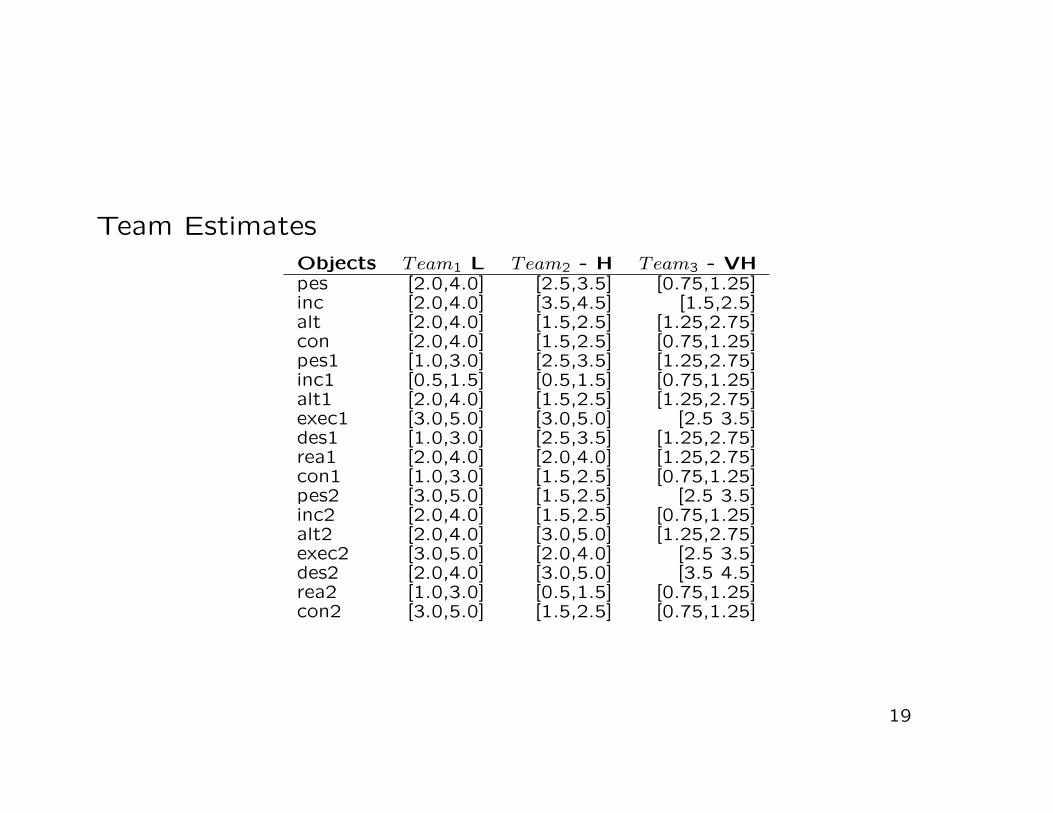
Team EstimatesObjects Team1 L Team2 - H Team3 - VHpes [2.0,4.0] [2.5,3.5] [0.75,1.25]inc [2.0,4.0] [3.5,4.5] [1.5,2.5]alt [2.0,4.0] [1.5,2.5] [1.25,2.75]con [2.0,4.0] [1.5,2.5] [0.75,1.25]pes1 [1.0,3.0] [2.5,3.5] [1.25,2.75]inc1 [0.5,1.5] [0.5,1.5] [0.75,1.25]alt1 [2.0,4.0] [1.5,2.5] [1.25,2.75]exec1 [3.0,5.0] [3.0,5.0] [2.5 3.5]des1 [1.0,3.0] [2.5,3.5] [1.25,2.75]rea1 [2.0,4.0] [2.0,4.0] [1.25,2.75]con1 [1.0,3.0] [1.5,2.5] [0.75,1.25]pes2 [3.0,5.0] [1.5,2.5] [2.5 3.5]inc2 [2.0,4.0] [1.5,2.5] [0.75,1.25]alt2 [2.0,4.0] [3.0,5.0] [1.25,2.75]exec2 [3.0,5.0] [2.0,4.0] [2.5 3.5]des2 [2.0,4.0] [3.0,5.0] [3.5 4.5]rea2 [1.0,3.0] [0.5,1.5] [0.75,1.25]con2 [3.0,5.0] [1.5,2.5] [0.75,1.25]
19

Design Scenarios
• Early design options
• Risk analysis without implementation costs
• Time-to-market
• Implementation cost
• Execution time
• Team load
Mathematical model incorporating system views, team estimates, and risk analysis
20

Mathematical Formulation
SILP - Stochastic Integer Linear Problem
min{∑i,j
cijxij}
s.t.
Prob{∑
j
aijxij ≤ bi} ≥ 1− αi,
where xij ∈ {0,1}, aij, bi and cij are random variables, and 0 ≤ αi ≤ 1 represents the
uncertainty that the equation will be satisfied.
21

Constraints: only one initial/final week
• There is only one initial (γijk) and final (Γijk) week for each
object i implemented by team j, i.e.
∀i ∈ Objects, j ∈ Teams∑
k∈Weeks
γijk = xij;
∀i ∈ Objects, j ∈ Teams∑
k∈Weeks
Γijk = xij.
22

Constraints: path execution time
• Path execution time. For each path (p) in SG Graph (se-
quencing view), the estimated execution time of the meth-
ods implemented by teams (dmj) in the path must satisfy a
maximum execution time (DIp) with a defined probability of
certainty (1 − αpath). Each method m of object i in path
p ∈ PathsE is represented by a 3-tuple (i, p,m), i.e.
∀P ∈ PathsE, j ∈ Teams
Prob{∑
(i,p,m)∈Pdmjxij ≤ DIp} ≥ 1− αpath
23

Constraints: team load
• Maximum load for team j (k1 is the first week). At week k1: team j can be implementingan object i or not, i.e.
∀i ∈ Objects, j ∈ Teams aijk1 = γijk1 − Γijk1
where, ∀ijΓijk1 = 0. At other weeks: team j can be implementing object i if it beginsin this week (γijk = 1) or it is already implementing it (aij(k−1) = 1) and it did not endyet (Γijk = 0), i.e.
∀i ∈ Objects, j ∈ Teams, k ∈ Weeks aijk = aij(k−1) + γijk − Γijk
At each week, the maximum load of a team (Λj) must be satisfied, i.e. the entire effortwasted on all objects by a team at a week must be less or equal to the maximum loadof this team with a defined probability of certainty (1− αload). Thus,
∀j ∈ Teams, k ∈ Weeks Prob{∑
i∈Objects
λijaijk ≤ Λj} ≥ 1− αload
24

Constraints: object assignment
• Object assignment. The final week (Γijk) of an implemen-
tation is greater or equal the development time (tij) plus
the initial week (γijk) with a defined probability of certainty
(1− αassignment), i.e.
∀i ∈ Objects, j ∈ Teams
Prob{∑
k∈Weeks
kΓijk ≥ tijxij +
∑k∈Weeks
kγijk} ≥ 1− αassignment.
25
Solving SILP
• Exact solution: uniform (0-1 ILP with quadratic number of original variables), gaussian(non-linear)
• Traditional approaches: expected value formulation (EVF) [Ermolieve,1988]
• All estimates will be under/overestimated in the same way
– each team tends to mantain the same direction on estimates
– uncertainty is high on early stages of design
26
Solving SILP: Extending EVF
• Extended expected value formulation for scenario represen-
tation
• The approximation is
min{∑i,j
Prob{cij ≥ 1− αo}xij}
s.t. ∑j
Prob{aij ≥ 1− αi}xij ≤ bi
27

Scenario Representation
aij = (µaij + F−1(1− αi)σaij),
where F−1(1− αi) is the inverse CDF for Gaussian distribution:
1− α = 50% → F−1(1− αi) = 01− α = 80% → F−1(1− αi) = 11− α = 97% → F−1(1− αi) = 21− α = 99% → F−1(1− αi) = 3
50% 80% 99% x
F(x)
F(x) = CDF of continuos random variable
28
The Scenario Formulation
• Extending the approximation for design scenarios, and con-
sidering a1 and a2 normally distributed, the constraint
Prob{a1x1 + a2x2 ≤ b} ≥ 1− α
can be replaced by
(µa1 +F−1(1− α)σa1)x1 + (µa2 +F−1(1− α)σa2)x2 ≤ b
29
Design Scenarios Revisited
• Early system design views based on graphs (hierarchical, sequencing - SG, development- DG)
• Team estimates using PROBE/PSP and confidence degrees (µ, σ)
• Design scenarios varying the objective function (min{∑
i,jcijxij})
• Risk analysis varying the α parameter in aij = (µaij + F−1(1− αi)σaij)
• Partitioning analysis varying constraint inequations and values
30
Outline
• The problem
• Related works
• Stochastic model based on system views
• Design scenario analysis
• Some results
• Conclusions and future works
31
Examples
• MRF (Markov Random Fields), 8 functional objects
• Net Controller, 11 functional objects
• SAR (Synthetic Aperture Radar), 15 functional objects
• Scenario Analysis
– Partitioning
– Risk analysis
– Clustering
– Spiral convergence
– Computational parameters
32

Partitioning Analysis
33
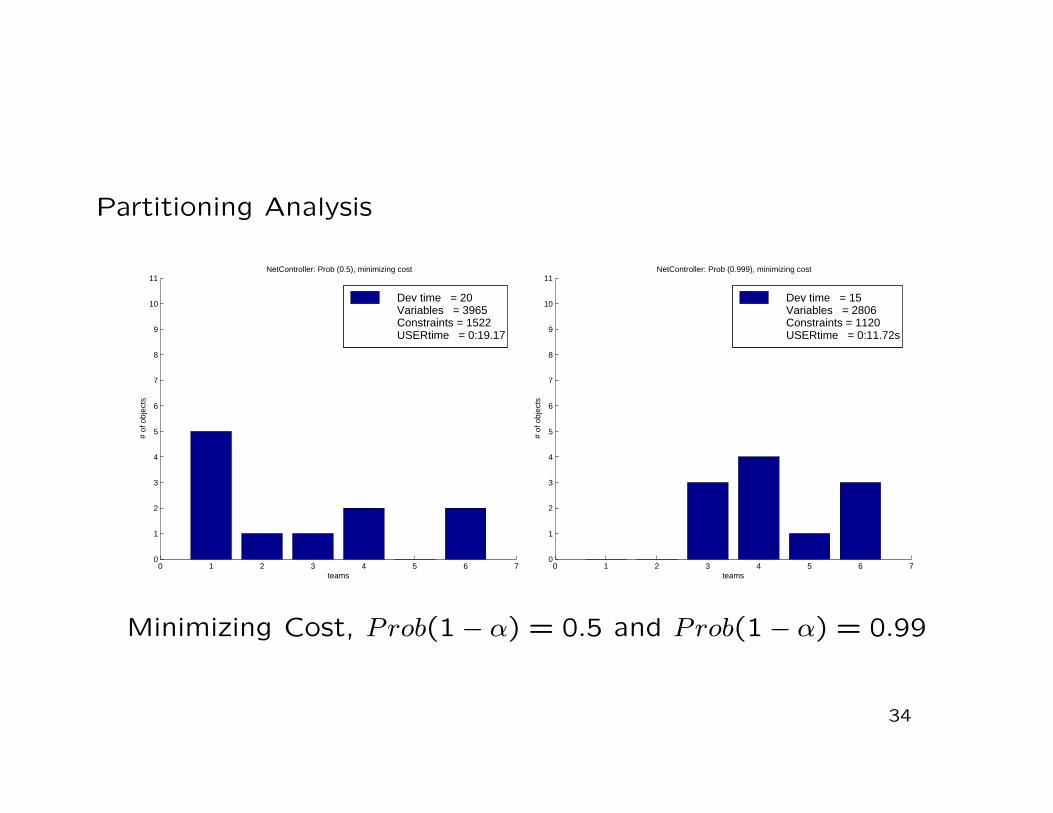
Partitioning Analysis
0 1 2 3 4 5 6 70
1
2
3
4
5
6
7
8
9
10
11NetController: Prob (0.5), minimizing cost
teams
# of
obj
ects
Dev time = 20Variables = 3965Constraints = 1522USERtime = 0:19.17
0 1 2 3 4 5 6 70
1
2
3
4
5
6
7
8
9
10
11NetController: Prob (0.999), minimizing cost
teams
# of
obj
ects
Dev time = 15Variables = 2806Constraints = 1120USERtime = 0:11.72s
Minimizing Cost, Prob(1− α) = 0.5 and Prob(1− α) = 0.99
34
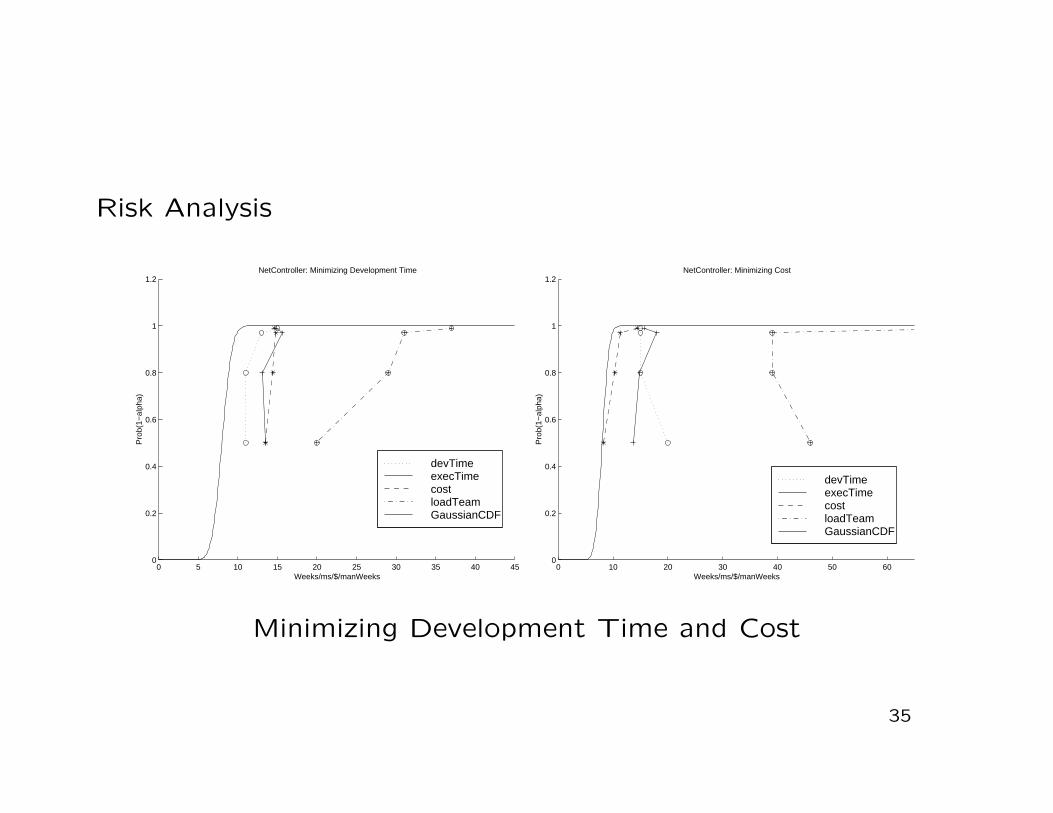
Risk Analysis
0 5 10 15 20 25 30 35 40 450
0.2
0.4
0.6
0.8
1
1.2NetController: Minimizing Development Time
Weeks/ms/$/manWeeks
Pro
b(1−
alph
a)
devTimeexecTimecostloadTeamGaussianCDF
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
1.2NetController: Minimizing Cost
Weeks/ms/$/manWeeks
Pro
b(1−
alph
a)
devTimeexecTimecostloadTeamGaussianCDF
Minimizing Development Time and Cost
35

Risk Analysis
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
1.2NetController: Minimizing Execution Time
Weeks/ms/$/manWeeks
Pro
b(1−
alph
a)
devTimeexecTimecostloadTeamGaussianCDF
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
1.2NetController: Minimizing Team Load
Weeks/ms/$/manWeeks
Pro
b(1−
alph
a)
devTimeexecTimecostloadTeamGaussianCDF
Minimizing Execution Time and Team Load
36

Clustering
Risk NetWork Controller - Objects (min Dev Time)rcvd xmit enqueue exec bit buffer frame xmit b xmit f
0.5 tm1 tm1 tm1 tm1 tm1 tm2 tm3 tm4 tm40.8 tm3 tm3 tm3 tm3 tm3 tm6 tm3 tm4 tm40.97 tm3 tm3 tm3 tm3 tm3 tm5 tm3 tm4 tm40.99 tm6 tm3 tm3 tm4 tm3 tm4 tm4 tm4 tm4
Clustering team assignment when minimizing System Cost
37
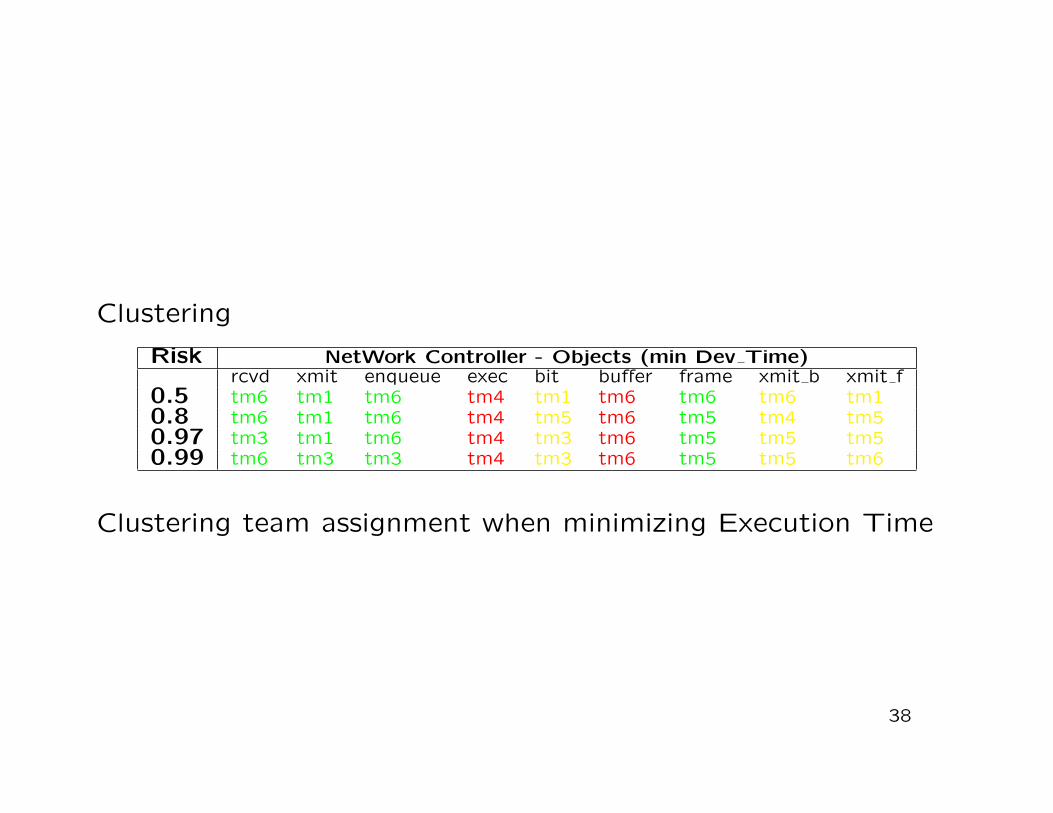
Clustering
Risk NetWork Controller - Objects (min Dev Time)rcvd xmit enqueue exec bit buffer frame xmit b xmit f
0.5 tm6 tm1 tm6 tm4 tm1 tm6 tm6 tm6 tm10.8 tm6 tm1 tm6 tm4 tm5 tm6 tm5 tm4 tm50.97 tm3 tm1 tm6 tm4 tm3 tm6 tm5 tm5 tm50.99 tm6 tm3 tm3 tm4 tm3 tm6 tm5 tm5 tm6
Clustering team assignment when minimizing Execution Time
38

Convergence Analysis
1 2 6 9 11 i
P(i)
i
P(i)
2 2 3 4 1195
Minimizing Development Time and Execution Time
39

Computational Parameters
Times for first iteration
Case-Study Num.variables Num.constraints Iterations USER Time (h:m:s)MRF 2852 1089 13890 00:01:02NET 3965 1462 38576 00:03:32SAR 7260 2690 187808 01:16:21
Constraints = O(objects× weeks× teams)
40

Conclusions
• A stochastic model to system design by teams and multiple
technologies on conceptual level
• Interactive partitioning using design manager decisions based
on clustering scenarios
• Clustering scenarios to refine the process and minimize the
SILP problem at each iteration, reducing the computational
time
41

Contributions
• A stochastic model for system design by teams
• An approach with confidence degrees to model risk analysis and team aspects
• System description by views on early stages (conceptual level design)
• A mathematical formulation for partitioning with multiple technologies
• An extended expected value formulation to represent design scenarios
• Interactive and iterative partitioning using clustering to refine the process and to reducethe SILP problem
• Design scenarios representing partitioning options, uncertainty, team aspects and designconstraints
42

At Work
• Applying in real industry: PINTO FILHO, K. V. ; BOCANEGRA, S. ; ALBUQUERQUE,J. . Uma proposta de modelagem para o calculo de reservas de contingencia e gerencialem projetos de software usando programacao linear inteira estocastica DOI 10.5752/P.2316-9451.2012v1n1p50. Abakos, v. 1, p. 50-74, 2012.
• Integrating conceptual level design in a commercial tool (FACEPE - 2013-2015)
• Solving SILP: other approximations, Interior Points, and parallel strategies
• Other mathematical formulations for the conceptual level design problem and heuristics
43

Aknowledgements
• This work was [partially] supported by the National Insti-
tute of Science and Technology for Software Engineering
(www.ines.org.br), funded by CNPq and FACEPE, grants
573964/2008-4 and APQ-1037-1.03/08.
44