masks © 2004 invitation to 3d vision lecture 11 vision-based landing of an unmanned air vehicle
TRANSCRIPT

MASKS © 2004 Invitation to 3D vision
Lecture 11Vision-based Landing of an
Unmanned Air Vehicle

MASKS © 2004 Invitation to 3D vision
Applications of Vision-based Control
Fire Scout
Global HawkPredator
SR/71
UCAV X-45

MASKS © 2004 Invitation to 3D vision
Goal: Autonomous landing on a ship deck
Challenges• Hostile environments
Ground effect Pitching deck High winds, etc
Why vision?• Passive sensor • Observes relative motion

MASKS © 2004 Invitation to 3D vision
Simulation: Vision in the loop

MASKS © 2004 Invitation to 3D vision
Vision-Based Landing of a UAV
• Motion estimation algorithms Linear, nonlinear, multiple-view Error: 5cm translation, 4° rotation
• Real-time vision system Customized software Off-the-shelf hardware
• Vision in Control Loop• Landing on stationary deck• Tracking of pitching deck

MASKS © 2004 Invitation to 3D vision
Vision-based Motion Estimation
Pinhole Camera
Landing target
Image plane
Feature Points
Current pose

MASKS © 2004 Invitation to 3D vision
Pose Estimation: Linear Optimization
• Pinhole Camera:• Epipolar Constraint:• Planar constraint:
• More than 4 feature points• Solve linearly for• Project onto to recover

MASKS © 2004 Invitation to 3D vision
Pose Estimation: Nonlinear Refinement
• Objective: minimize error
• Parameterize rotation by Euler angles
• Minimize by Newton-Raphson iteration
• Initialize with linear algorithm

MASKS © 2004 Invitation to 3D vision
Multiple-View Motion Estimation
Multiple View Matrix
Rank deficiency constraint
Pinhole Camera

MASKS © 2004 Invitation to 3D vision
Multiple-View Motion Estimation
• n points in m views
• Equivalent to finding s.t.
• Initialize with two-view linear solution
• Least squared solution:
• Use to linearly solve for• Iterate until converge
MASKS © 2004 Invitation to 3D vision
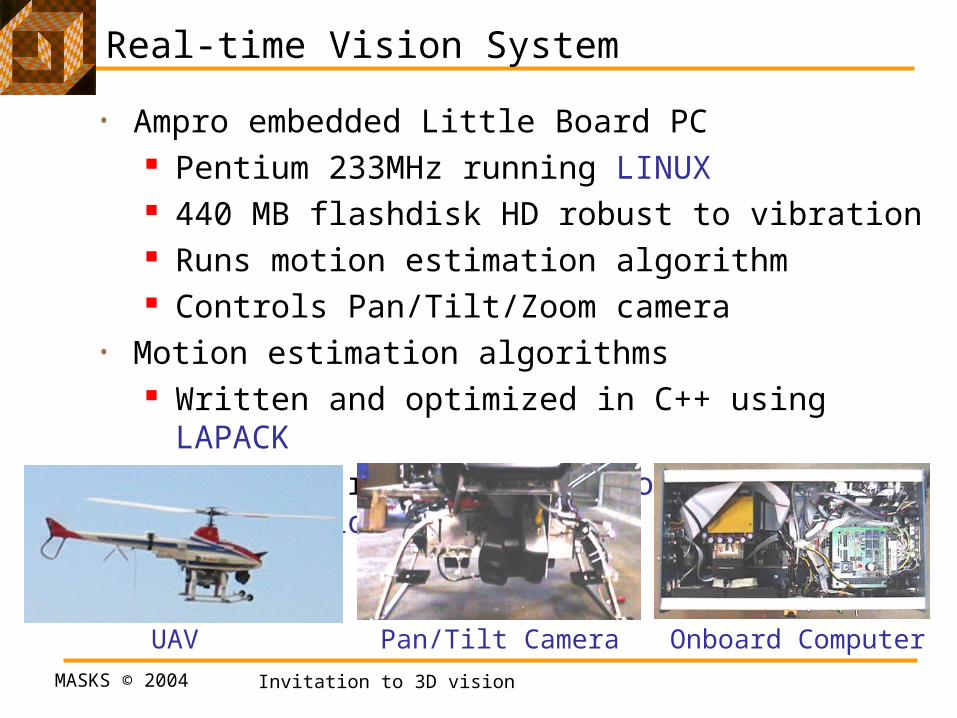
Real-time Vision System
• Ampro embedded Little Board PC Pentium 233MHz running LINUX 440 MB flashdisk HD robust to vibration Runs motion estimation algorithm Controls Pan/Tilt/Zoom camera
• Motion estimation algorithms Written and optimized in C++ using LAPACK Estimate relative position and orientation at
30 Hz
UAV Pan/Tilt Camera Onboard Computer

MASKS © 2004 Invitation to 3D vision
Hardware Configuration
On-board UAVVision System
Vision Computer
RS232
RS232
Vision Algorithm
Frame Grabber
Camera
WaveLAN to Ground
Navigation SystemNavigation Computer
RS232 RS232
Control & Navigatio
n
INS/GPS
WaveLAN to Ground

MASKS © 2004 Invitation to 3D vision
Feature Extraction
• Acquire Image• Threshold Histogram• Segmentation• Target Detection• Corner Detection• Correspondence

MASKS © 2004 Invitation to 3D vision
• Pan/Tilt to keep features in image center Prevent features from leaving field of view Increased Field of View Increased range of motion of UAV
Camera Control
MASKS © 2004 Invitation to 3D vision
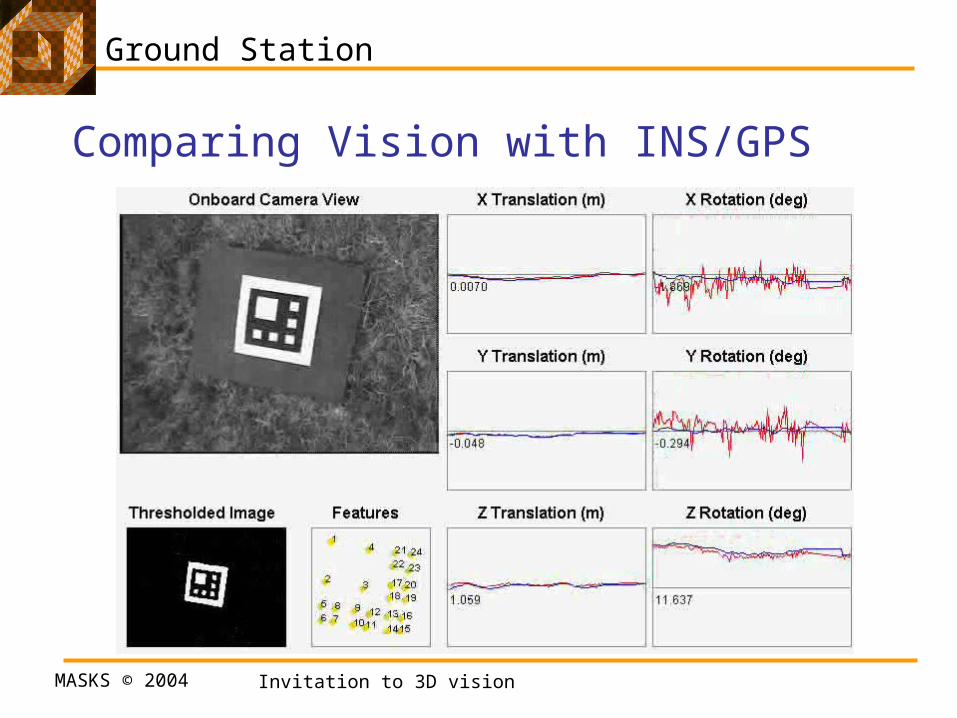
Ground Station
Comparing Vision with INS/GPS

MASKS © 2004 Invitation to 3D vision
Motion Estimation in Real Flight Tests

MASKS © 2004 Invitation to 3D vision
Landing on Stationary Target

MASKS © 2004 Invitation to 3D vision
Tracking Pitching Target

MASKS © 2004 Invitation to 3D vision
Conclusions
• Contributions Vision-based motion estimation (5cm accuracy) Real-time vision system in control loop Demonstrated proof of concept prototype:
first vision-based UAV landing• Extensions
Dynamic vision: Filtering motion estimates Symmetry-based motion estimation Fixed-wing UAVs: Vision-based landing on runways Modeling and prediction of ship deck motion Landing gear that grabs ship deck Unstructured environments: Recognizing good
landing spots (grassy field, roof top etc)