massively parallel gpu-friendly algorithms for · pdf filemassively parallel gpu-friendly...
TRANSCRIPT

Massively Parallel GPU-friendly
Algorithms for PET
Szirmay-Kalos László, http://cg.iit.bme.hu,
Budapest, University of Technology and Economics

(GP)GPU: CUDA (OpenCL)
Multiprocessor N
Multiprocessor 2
Multiprocessor 1
Scalar
Processor
1
Shared memory
Scalar
Processor
M
Cache
Device memory
Instruction
Execution
Unit
• Massively parallel:
#threads > 104
• Independence:
synchronization and
write collisions should
be avoided
• SIMD: conditional
statements are not
welcome
• Coalesced memory
access

PET physics
Line Of Response
(LOR)
P
e-
e+PN

MedisonanoScan PET AnyScan PET

Maximum-likelihood reconstruction
x1 x2
x3 x4
Expected number of hits:
Maximize the probability of
the measurement data y:
A11
A13
A12
A14
xAy ~
414313
2121111~
xAxA
xAxAy
)}(~|Pr{maxarg xyyx

Iterative solution
Activity in voxels
Correction
Physics
Simulation
Measured
valuesExpected
values

Computational challenges
• Numbers of LORs and voxels: hundred millions!
• System matrix A: 1016 elements (PetaBytes)
– Probability that a positron of a voxel is detected by a LOR
– Patient dependent
– Not sparse if accurate simulation is needed
– Do not store, estimate on-the-fly
• Matrix elements are high dimensional integrals
– Monte Carlo quadrature
– Reuse of computation
– High performance (parallel) computational platform
• Minimize the effect of estimation error
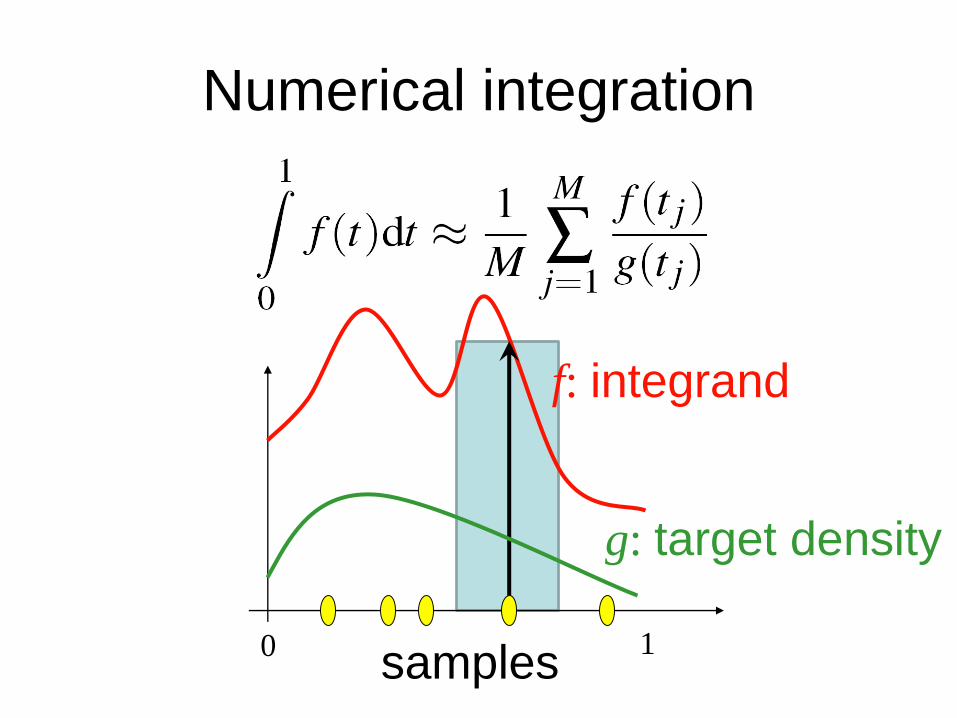
Numerical integration
0 1
f: integrand
g: target density
samples
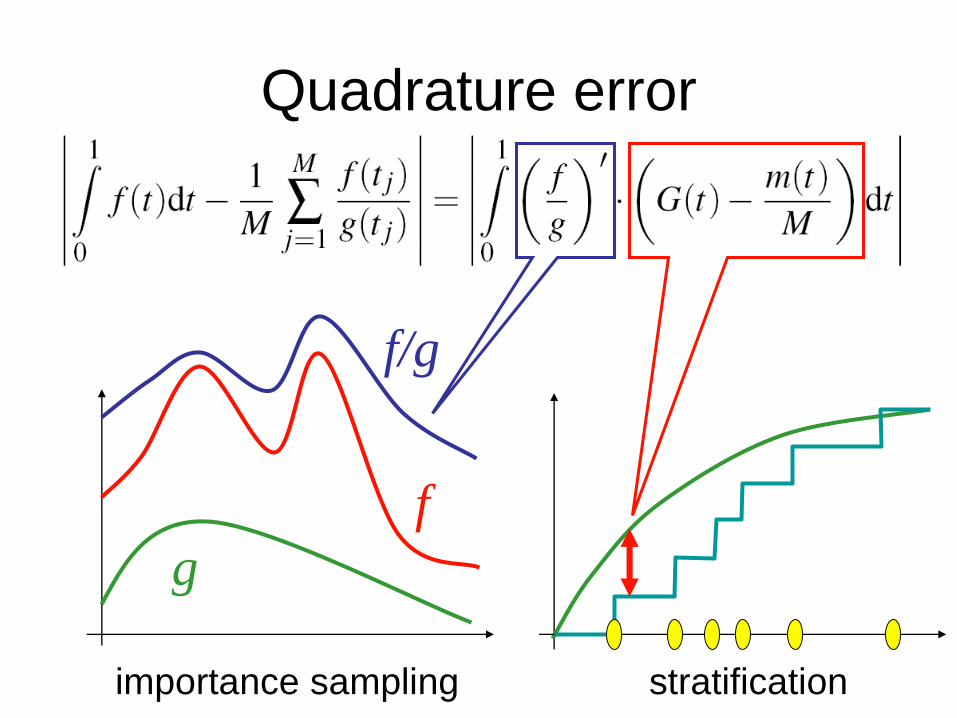
Quadrature error
f
g
f/g
importance sampling stratification
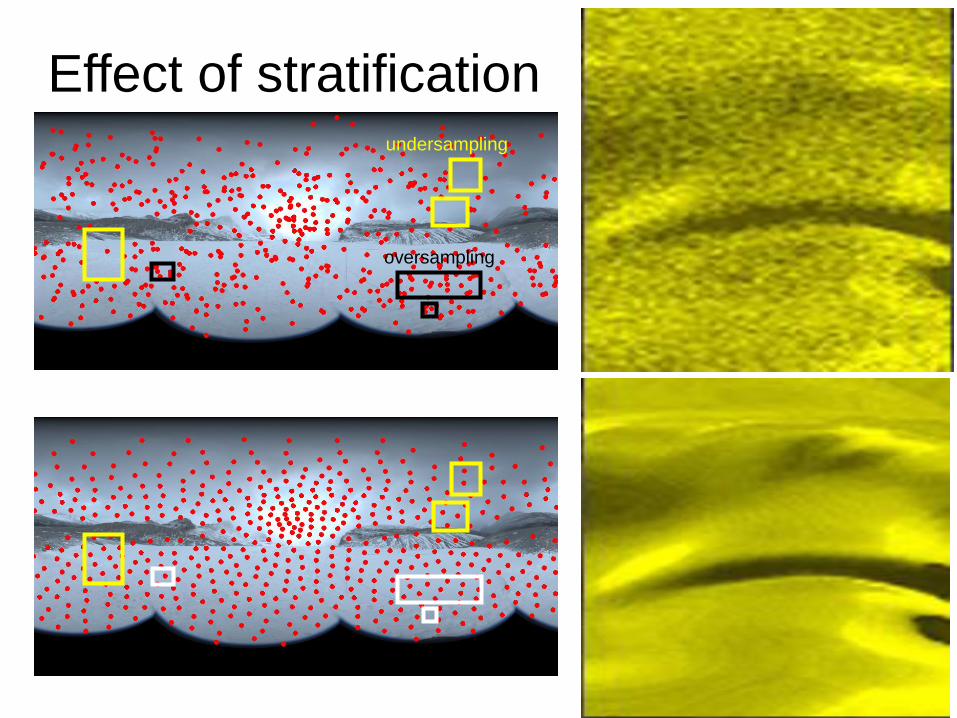
Effect of stratificationundersampling
oversampling
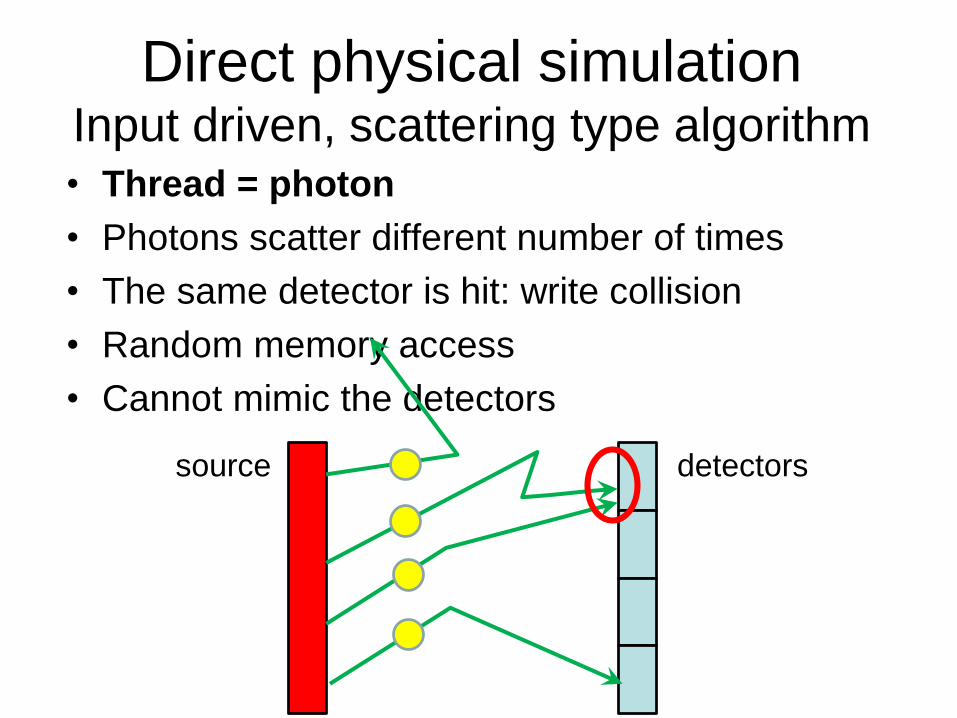
Direct physical simulationInput driven, scattering type algorithm• Thread = photon
• Photons scatter different number of times
• The same detector is hit: write collision
• Random memory access
• Cannot mimic the detectors
source detectors

GPU friendly approachOutput driven, gathering type
• Thread = importon
• SIMD: grouping importons
• No write collision: LOR-driven
• Cannot mimic the source
source detectors
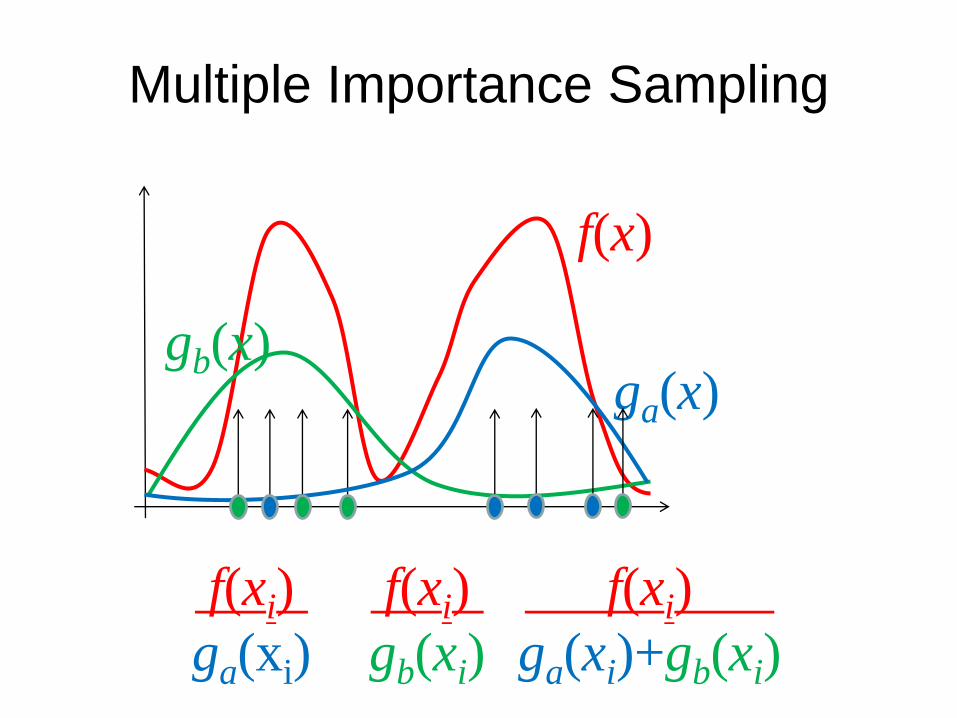
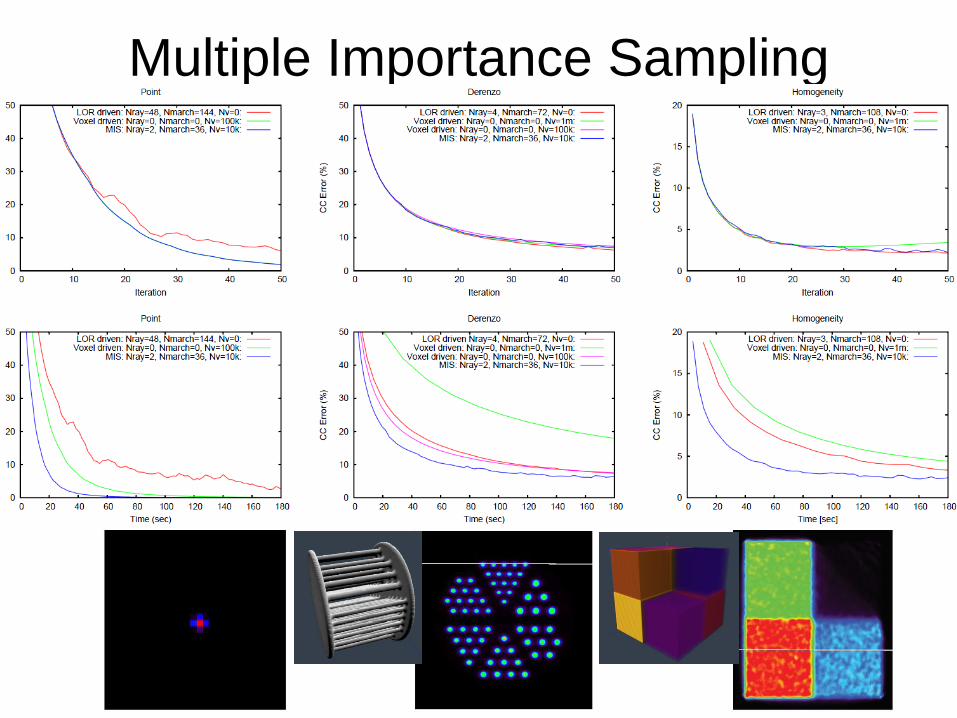
Multiple Importance Sampling
f(x)
ga(x)gb(x)
f(xi)
ga(xi)
f(xi)
gb(xi)
f(xi)
ga(xi)+gb(xi)

Direct gamma photon contribution
Detector
module 1
Detector
module 2
voxel
LOR
vvx dd )(
5D Integration
• Accuracy for given
sample number
• Cost of a sample
l

Output- or LOR-driven sampling
Detector
module 1
Detector
module 2
LOR
lwuGD
Nlg
),(),(
2
ray
1
Pros:
• Gathering
• Thread coherence
• Texture coherence
• Uniform on detectors
• Low-cost samples
due to reuse
Cons:
• Cannot mimick activityl
l
u
w

Input or voxel-driven sampling
Detector
module 1
Detector
module 2
LOR
Pros:
• Can mimick activity
Cons:
• Write collisions
• Less coherence
vxD
ullxNlg
d)cos(
)(),(
2
voxel
2
l
u

Multiple Importance Sampling
voxel voxel
+
lwuGD
Nlg
),(),(
2
ray
1
),(),(),( 21
lglglg
vxD
ullxNlg
d)cos(
)(),(
2
voxel
2
Multiple Importance Sampling
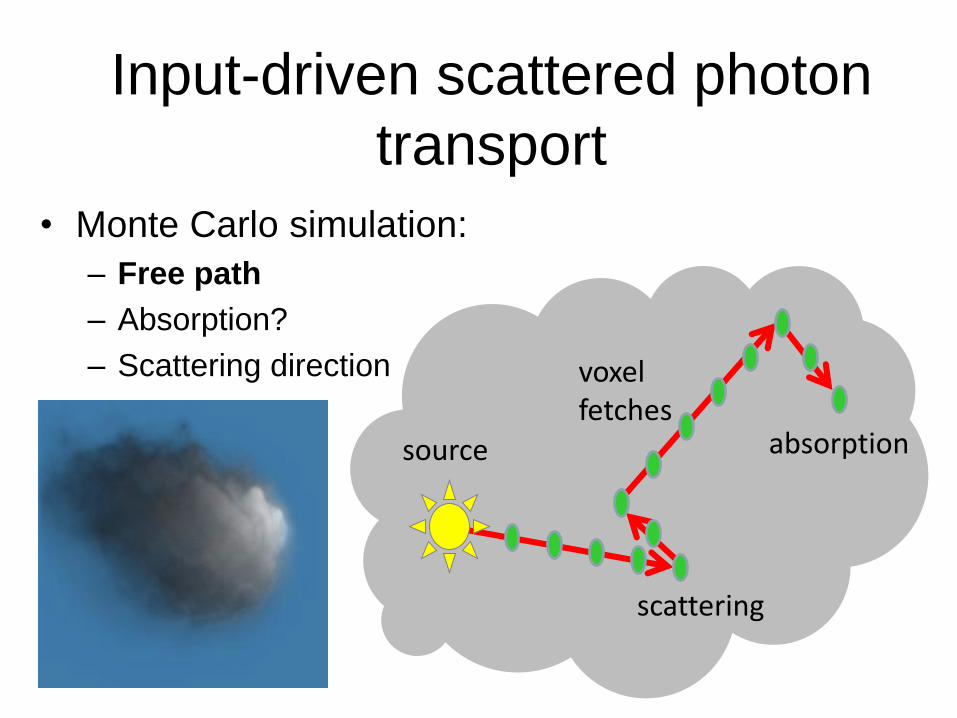
Input-driven scattered photon
transport
• Monte Carlo simulation:
– Free path
– Absorption?
– Scattering direction
source absorption
voxelfetches
scattering
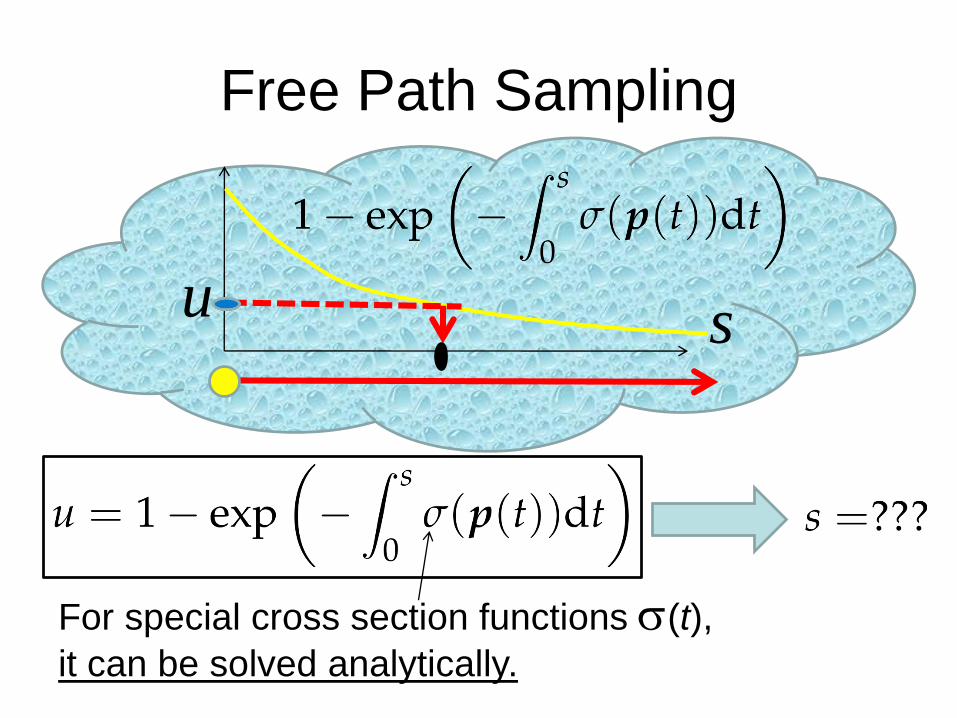
u s
Free Path Sampling
For special cross section functions (t),
it can be solved analytically.

Ray marching
• Complexity grows with the resolution
• Slow in high resolution low density media
)exp(1 si
i
u

Mix virtual particles to obtain a density
that can be solved analytically
photon
Virtual
collision
Real
collision
Virtual particleReal material
particle
40963 effective resolution
64 billion sample points

Output-driven single-scattered
photon transport with reuse
1z
1s
2s
1. Scattering points 2. Ray marching between
scattering points and detectors
1s
2s
1z
2z
3. Combination
1s
2s
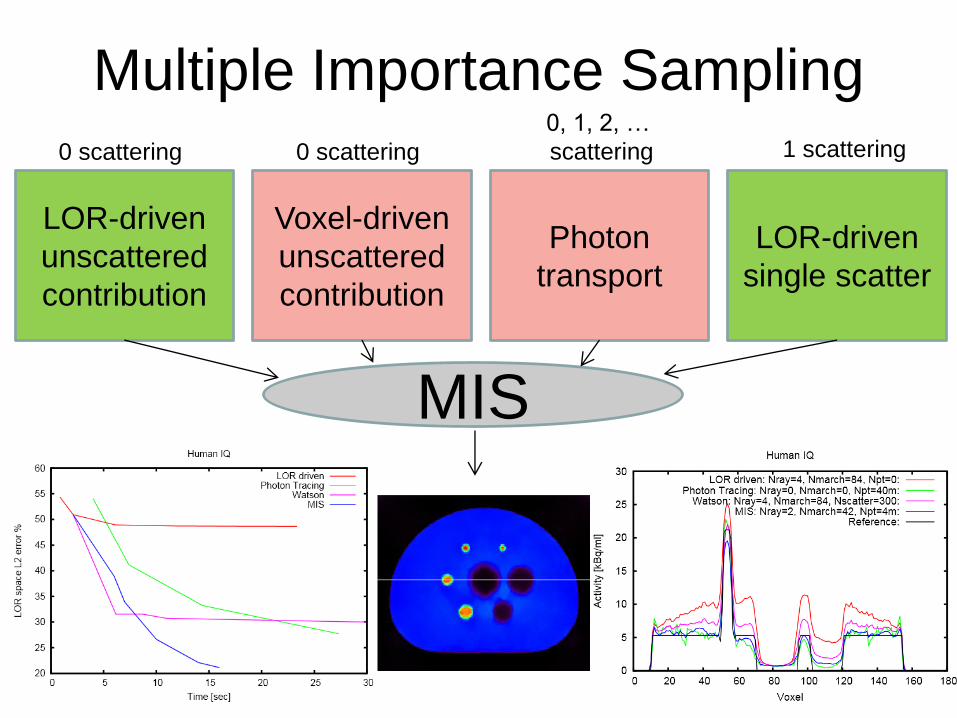
Multiple Importance Sampling
LOR-driven
unscattered
contribution
Voxel-driven
unscattered
contribution
Photon
transport
LOR-driven
single scatter
0 scattering 0 scattering
0, 1, 2, …
scattering 1 scattering
MIS
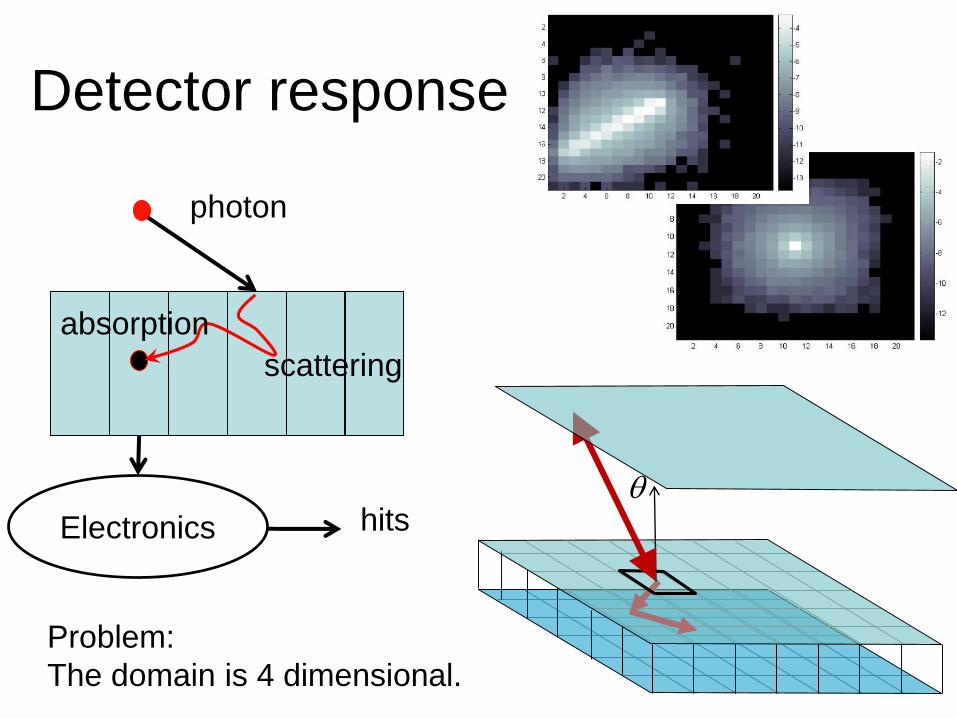
Detector response
photon
scattering
absorption
Electronics hits
Problem:
The domain is 4 dimensional.
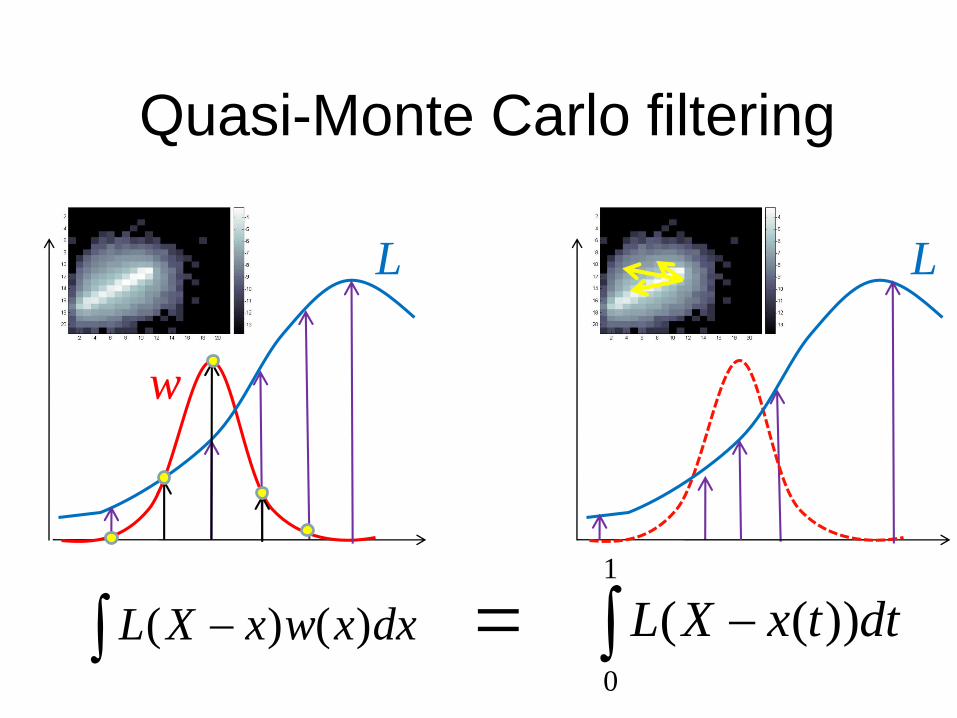
dxxwxXL )()(
1
0
))(( dttxXL
L
w
L
=
Quasi-Monte Carlo filtering

Detector Scattering Compensationw
ith
ou
t
with
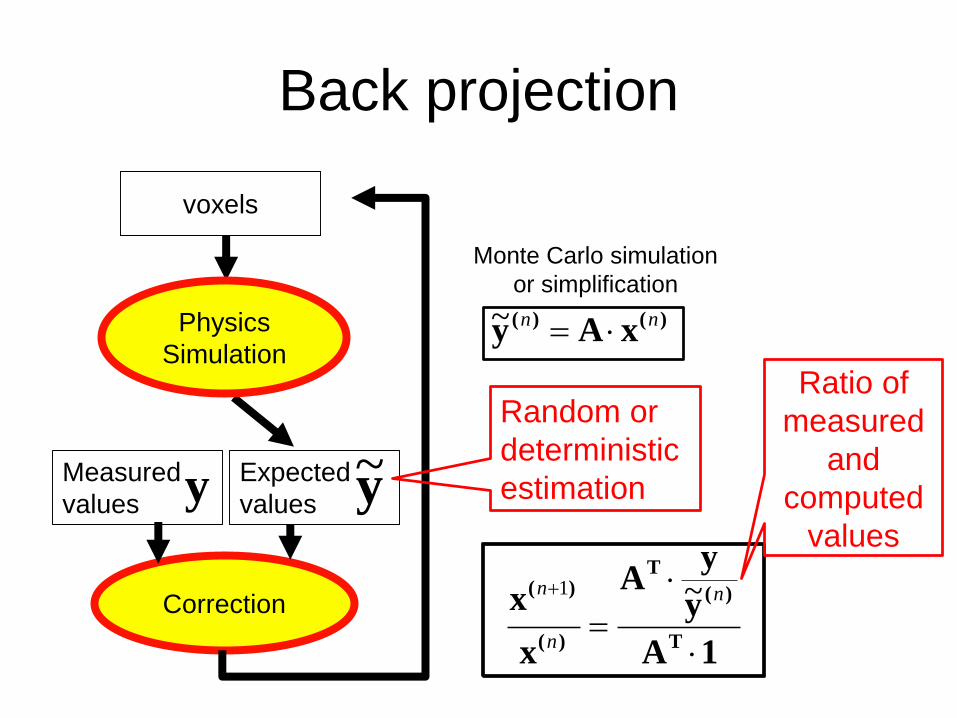
Measured
values
voxels
Correction
Physics
Simulation
)()( xAy nn ~
Expected
values
Back projection
Monte Carlo simulation
or simplification
Random or
deterministic
estimation
1A
y
yA
x
xT
)(
T
)(
)(
n
n
n ~1
y~y
Ratio of
measured
and
computed
values
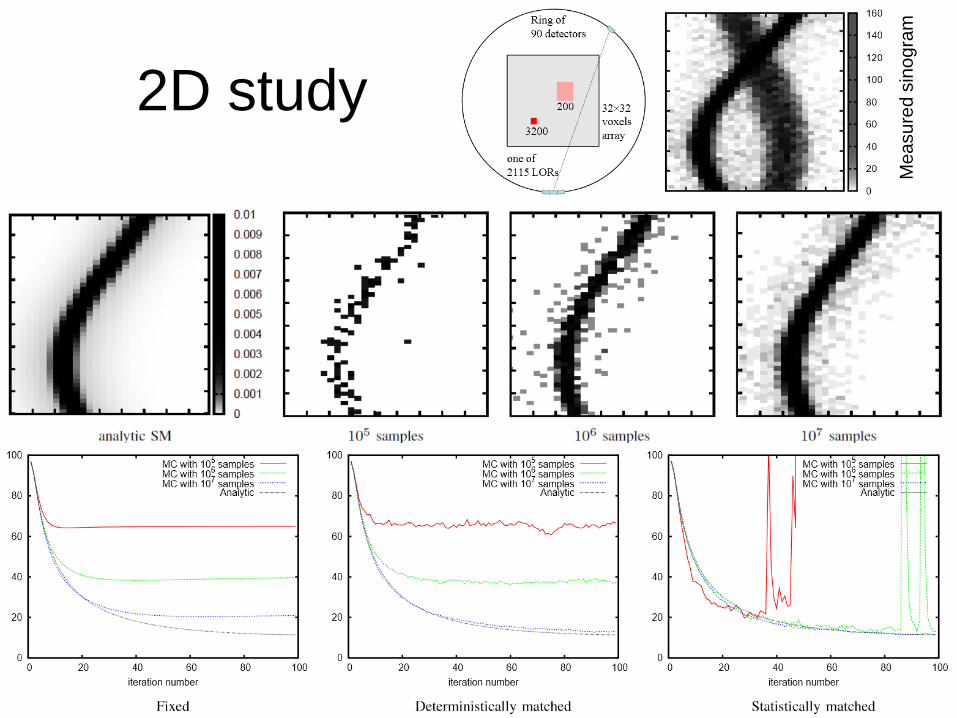
2D study
Me
asu
red
sin
og
ram
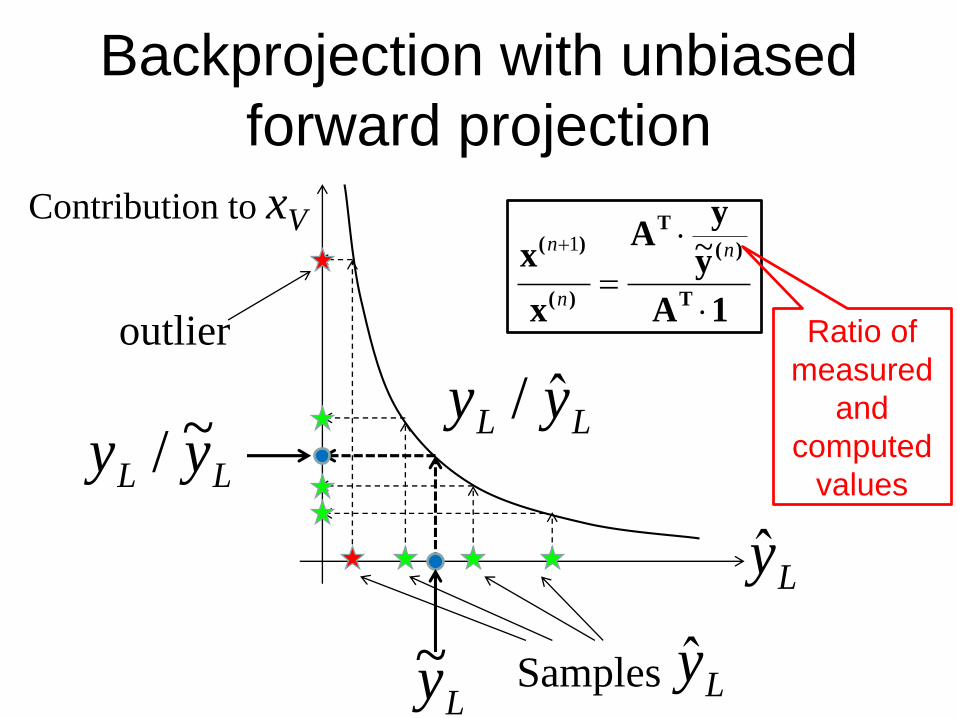
Backprojection with unbiased
forward projection
Contribution to xV
Samples
outlier1A
y
yA
x
xT
)(
T
)(
)(
n
n
n ~1
Ly~
Ly
Ly
LL yy ˆ/LL yy ~/
Ratio of
measured
and
computed
values

Reduce bias and outliers
• Averaging iteration:
• Metropolis iteration: Ignore outliers randomly
Acceptance with probability
nn / Ln
n
Ln
n
L yyy ˆ~)1(~ )1()(
}1,~/ˆmin{ )(n
LLL yya
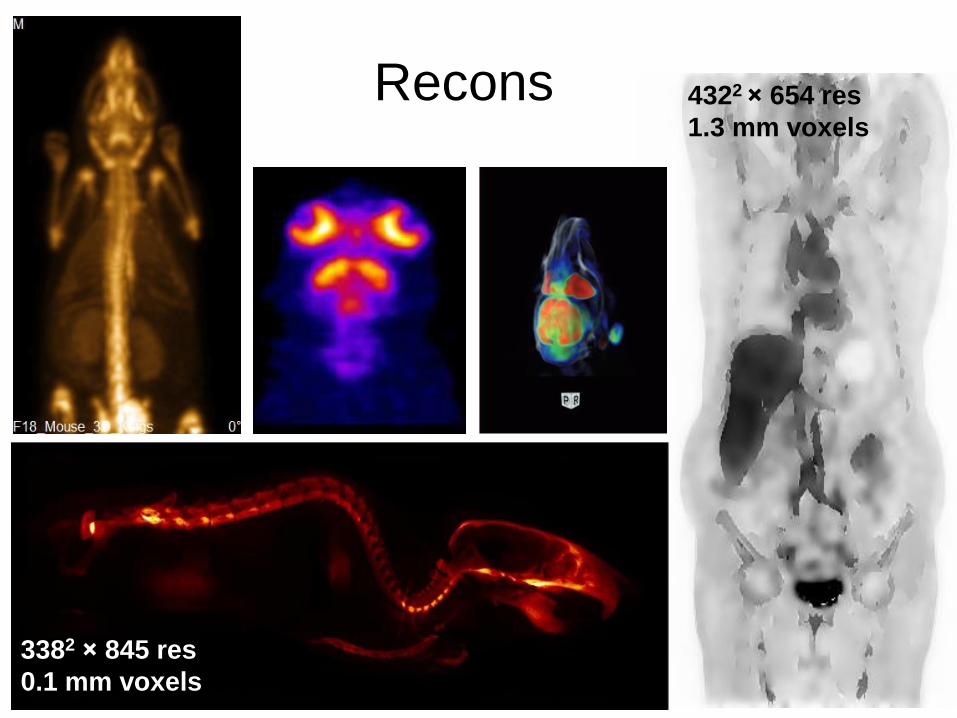
Recons
3382 × 845 res
0.1 mm voxels
4322 × 654 res
1.3 mm voxels
Conclusions
• GPU is an effective tool for computing tens
of thousands of parallel threads having no
conditionals and collisions.
• The problem must be interpreted and
solved to keep this requirement in mind.
• Randomization (Monte Carlo) can help
structure the problem in this way.